Sciences Industrielles. Dossier Technique. Robot Ericc 3. Robot Ericc 3. Travaux Pratiques de Sciences de l'ingénieur
|
|
|
- Valentin Piché
- il y a 8 ans
- Total affichages :
Transcription
1 Dossier Technique Robot Ericc 3 Robot Ericc 3 Travaux Pratiques de Sciences de l'ingénieur


2 Présentation du système Le robot Ericc 3 est un robot ayant 5 axes de rotation. Ce robot anthropomorphe est utilisé en entreprise pour de nombreuses tâches différentes : collage, soudage, peinture, manutention de pièces Le bras porteur est composé de plusieurs parties : Le socle La chaise Le bras L avant-bras Le poignet La pince La figure ci-contre, relative à un autre robot, illustre les positions des axes de rotation. La définition des axes est la suivante : Axe 1 : axe de lacet, associé au paramètre 1 Axe 2 : axe d épaule, associé au paramètre 2 Axe 3 : axe de coude, associé au paramètre 3 Axe 4 : axe de poignet, associé au paramètre 4 Axe 5 : axe de pince, associé au paramètre 5 1

3 Description structurelle Le système automatisé robot est constitué : D'un ordinateur de type PC avec le logiciel de commande, dont la fonction principale est de contrôler le robot tant au niveau de ses déplacements, qu'au niveau de son dialogue avec les périphériques, D'une carte de commande d'axes qui assure l'ensemble des asservissements. Le contrôle des axes est géré de manière autonome par le processeur local indépendamment du calculateur hôte, D'un coffret de puissance comportant notamment : Les amplificateurs de puissance, Les alimentations à partir du 220 V, Les contacteurs de commande des freins, L'électrovanne de commande de la pince pneumatique. D un robot 5 axes. 2

4 Manipulation Initialisation Mettre sous tension le robot. Allumer l ordinateur ensuite. Ouvrir le logiciel ERICC 3. Déplacement manuel Dans le menu Robot, sélectionner Déplacement manuel. Effectuer des déplacements des différents éléments du robot, sans toucher à la vitesse. Effectuer éventuellement les prises d origine. Agir directement sur les flèches représentant les différents mouvements ou préciser les angles souhaités à chaque partie du robot. Déplacement programmé Dans le menu Fichier, ouvrir le programme «progr1.pmc» Lancer le programme pour visualiser le cycle de déplacement. Effectuer les mêmes opérations pour le programme «cinemati.pmc». 3

5 Réducteurs et coefficients Coefficient = nombre d'impulsions codeur correspondant à 1 degré sur l'axe final. Performances annoncées Angles : Lacet : Epaule : Coude : Poignet : Pince : θ1 = ± 135 θ2 = + 90 /- 45 θ3 = - 42 /+ 47 θ4= ±90 θ5 = ± 180 Les erreurs de poursuite mini et maxi (FE-/FE+) ont été mesurées dans la configuration «bras tendu» avec une charge de 1 kg. La vitesse linéaire maximum est donnée en prenant en compte les mouvements du lacet et de l'épaule (R max = m) : contribution du lacet : m/s contribution de l'épaule : m/s ; vitesse cumulée : m/s 4
 : contribution du lacet : 1.")
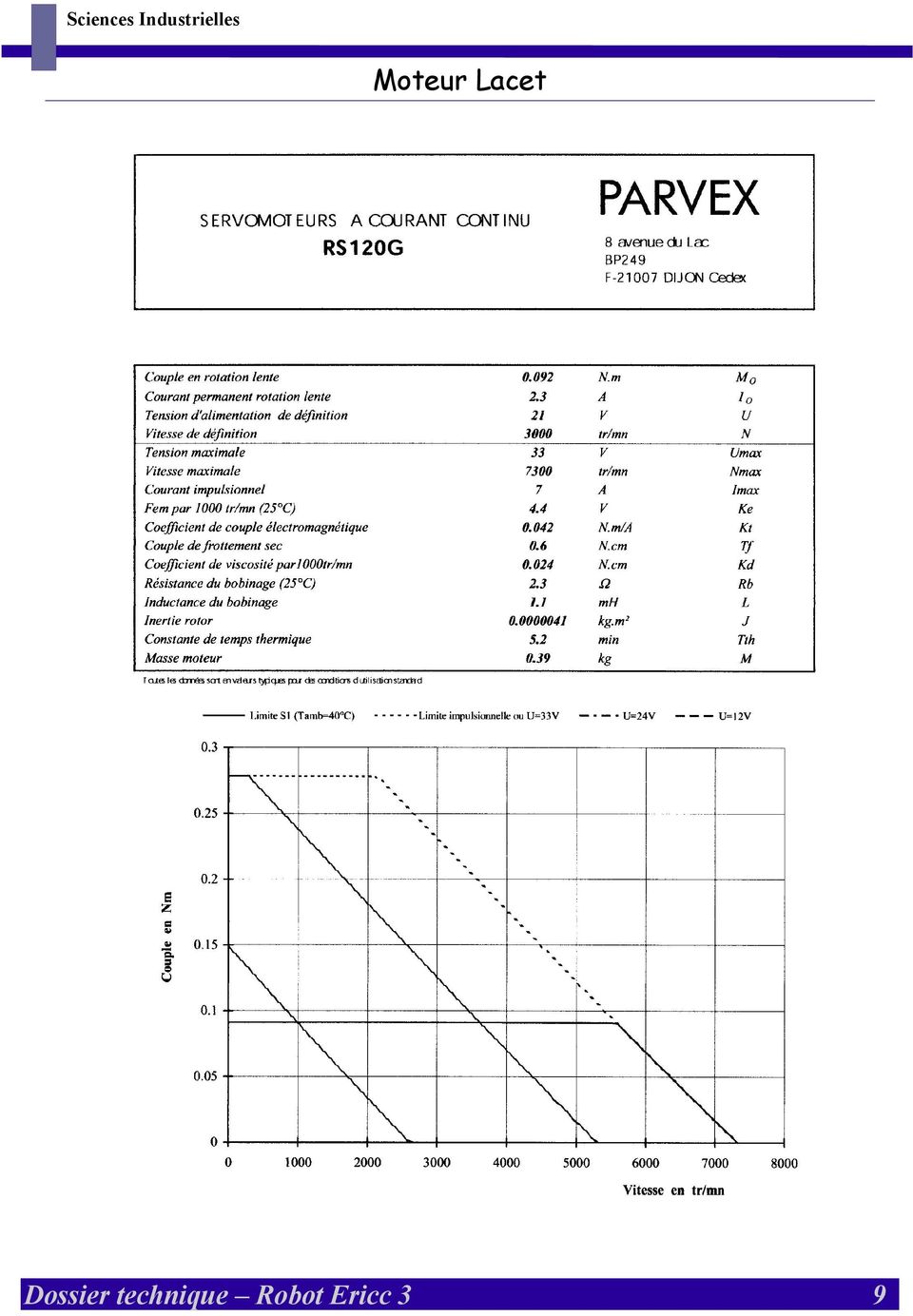
6 Caractéristiques de l axe de lacet Motorisation : RS 120 G (Parvex) Tension de définition Vitesse de définition FEM par 1000 tr/mn Résistance du bobinage Constante de couple Inductance du bobinage 21.2 V 3000 tr/mn 4.4 V 2.3 Ω N.m/A 1.1 mh Inertie du rotor Couple perm. rotation lente Courant perm. rotation lente Courant maxi Cte de temps thermique Masse du moteur kg.m N.m 2.3 A 7A 5.2 mn 0.36 kg Génératrice tachymétrique FEM pour 1000 tr/mn 3 V Inertie kg.m2 Résistance 60 Ω Masse 0.1 kg Codeur K9 Pulses en standard 500 Inertie kg.m2 Par comptage X 4 Masse 0.07 kg Réducteur associé : Harmonic Drive Rapport : 100 Vitesse d entrée : 3500 tr/mn Avec Lub. Spéciale : 5000 tr/mn Cple sortie maxi : 7.8 N.m Inertie à l entrée : kg.cm2 5

7 Réducteur Lacet Épaule Réducteur Coude 6

8 Réducteur Harmonic Drive 7

9 8

10 Moteur Lacet 9
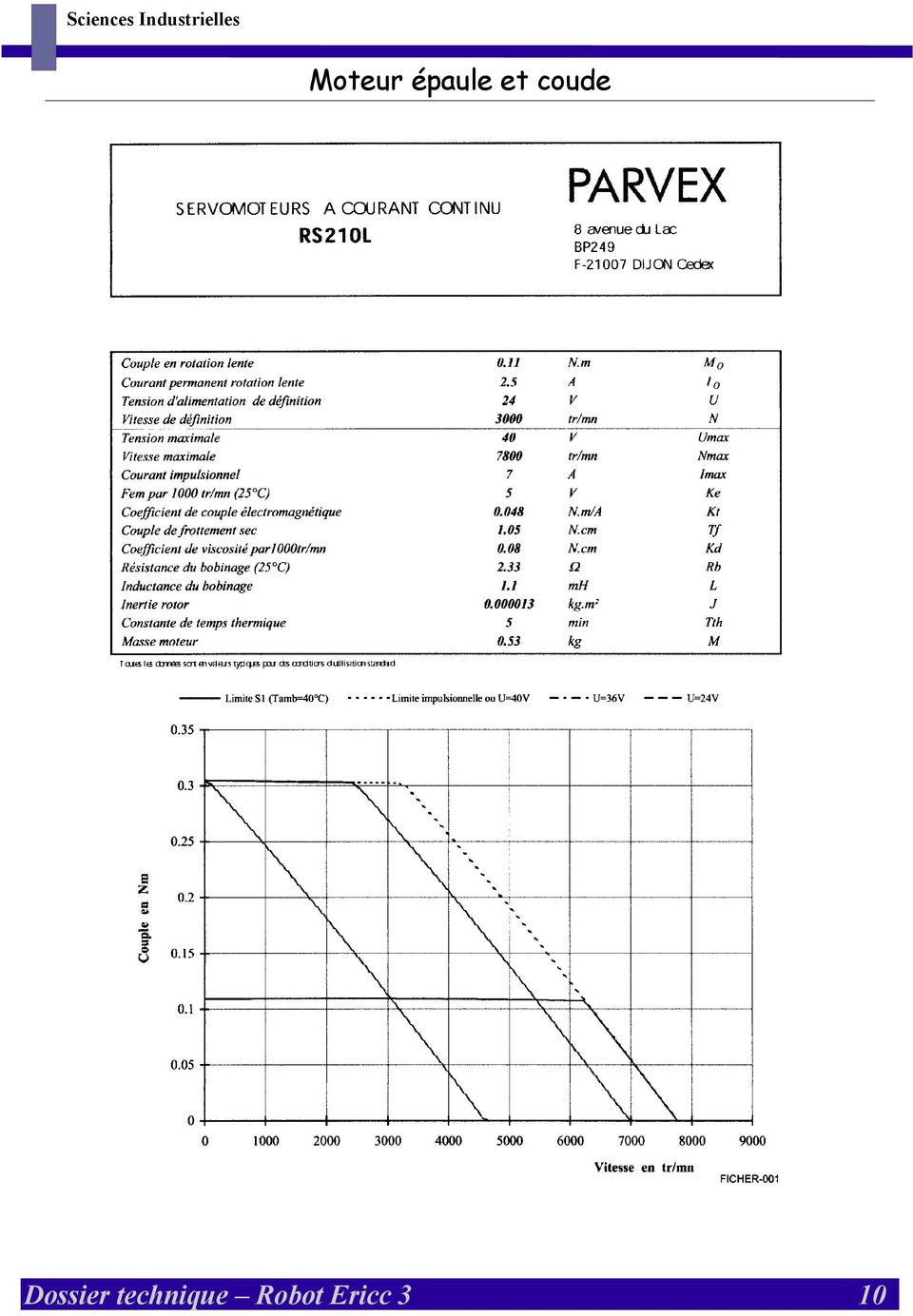
11 Moteur épaule et coude 10
12 11

13 12

14 Accessoires Lacet Épaule coude 13

15 14

16 Moteur poignet 15

17 16

18 Réducteur poignet 17

19 Codeur poignet 18

20 Moteur pince 19

21 20
22 Réducteur pince 21
23 22
24 Codeur pince 23
25 24
26 Ouverture/Fermeture de la pince 25
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Entraînements personnalisés
 67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
M HAMED EL GADDAB & MONGI SLIM
 Sous la direction : M HAMED EL GADDAB & MONGI SLIM Préparation et élaboration : AMOR YOUSSEF Présentation et animation : MAHMOUD EL GAZAH MOHSEN BEN LAMINE AMOR YOUSSEF Année scolaire : 2007-2008 RECUEIL
Sous la direction : M HAMED EL GADDAB & MONGI SLIM Préparation et élaboration : AMOR YOUSSEF Présentation et animation : MAHMOUD EL GAZAH MOHSEN BEN LAMINE AMOR YOUSSEF Année scolaire : 2007-2008 RECUEIL
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN. Machine à commande numérique destinée au tronçonnage des dés.
 MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
CHARGE ACTIVE. Banc d'essais de machines tournantes. Notice d'instruction. Cette notice doit être transmise. à l'utilisateur final
 4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES ETUDE D UN TRAITEMENT DE SURFACE
 TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
HELIOS UNITÉ SUSPENDUE
 HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
Machine à courant continu
 Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
CRM. Registre d équilibrage et de mesure du débit, classe d étanchéité 0 ou 4.
 Registre d équilibrage et de mesure du débit, classe d étanchéité 0 ou 4. Quelques caractéristiques Méthode de mesure agréée Classe de pression A Classé d'étanchéité à l'air 0 ou 4 Facteur de fuite du
Registre d équilibrage et de mesure du débit, classe d étanchéité 0 ou 4. Quelques caractéristiques Méthode de mesure agréée Classe de pression A Classé d'étanchéité à l'air 0 ou 4 Facteur de fuite du
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
CATALOGUE Tarifs UNE MOTORISATION EXTERIEURE POUR L ENSEMBLE DE NOTRE GAMME. BORNES ESCAMOTABLES Accès
 CATALOGUE Tarifs 2007 UNE MOTORISATION EXTERIEURE POUR L ENSEMBLE DE NOTRE GAMME BORNES ESCAMOTABLES Accès Borne mécanique MAHAUT Pièces en acier peintes : Ø 245 mm Tête de borne Collier guide Pièces en
CATALOGUE Tarifs 2007 UNE MOTORISATION EXTERIEURE POUR L ENSEMBLE DE NOTRE GAMME BORNES ESCAMOTABLES Accès Borne mécanique MAHAUT Pièces en acier peintes : Ø 245 mm Tête de borne Collier guide Pièces en
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
Systèmes d aspiration pour plan de travail
 Systèmes d aspiration pour plan de travail Les systèmes d aspiration Nederman pour plan de travail peuvent être utilisés dans tout type d environnement en partant des postes d assemblage où des fumées
Systèmes d aspiration pour plan de travail Les systèmes d aspiration Nederman pour plan de travail peuvent être utilisés dans tout type d environnement en partant des postes d assemblage où des fumées
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Moteurs pas à pas Michel ABIGNOLI Clément GOELDEL Principe des moteurs pas à pas Structures et modèles de description Alimentation Commande
 Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
MH 20/25-4 T. Buggie. Capacité 2000 kg et 2500 kg. Hauteur hors tout : moins de 2 mètres. Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw
 MH 20/25-4 T Buggie Capacité 2000 kg et 2500 kg Hauteur hors tout : moins de 2 mètres Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw Transmission hydrostatique MH 20/MH 25-4 T Buggie, les Déja novateur
MH 20/25-4 T Buggie Capacité 2000 kg et 2500 kg Hauteur hors tout : moins de 2 mètres Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw Transmission hydrostatique MH 20/MH 25-4 T Buggie, les Déja novateur
Réflexions pour une efficience énergétique optimale des convoyeurs
 Réflexions pour une efficience énergétique optimale des convoyeurs Janvier 2010 / White paper par Daniel Clénet, Make the most of your energy Sommaire Avant-propos... I Introduction... III Objectif de
Réflexions pour une efficience énergétique optimale des convoyeurs Janvier 2010 / White paper par Daniel Clénet, Make the most of your energy Sommaire Avant-propos... I Introduction... III Objectif de
En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles
 Intérêt de la simulation En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles En développement : Aide à la prise de décision Comparer des solutions Optimiser
Intérêt de la simulation En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles En développement : Aide à la prise de décision Comparer des solutions Optimiser
Panneau solaire ALDEN
 SOMMAIRE 1. Présentation... 1.1. Mise en situation... 1.2. Analyse du besoin... 4 1.. Problématique... 4 1.4. Expression du besoin... 5 1.5. Validation du besoin... 5 2. Analyse fonctionnelle... 2.1. Définition
SOMMAIRE 1. Présentation... 1.1. Mise en situation... 1.2. Analyse du besoin... 4 1.. Problématique... 4 1.4. Expression du besoin... 5 1.5. Validation du besoin... 5 2. Analyse fonctionnelle... 2.1. Définition
Manutentions manuelles Statistique nationale / Ile de France 1992
 Unité d Ergonomie Faculté de Médecine Pitié-Salpêtrière 91, bd de l Hôpital 75 634 Paris cedex 13 www.ergonomie.chups.jussieu.fr DIPLÔME D ERGONOMIE ET DE PHYSIOLOGIE DU TRAVAIL option1 Ergonomie du travail
Unité d Ergonomie Faculté de Médecine Pitié-Salpêtrière 91, bd de l Hôpital 75 634 Paris cedex 13 www.ergonomie.chups.jussieu.fr DIPLÔME D ERGONOMIE ET DE PHYSIOLOGIE DU TRAVAIL option1 Ergonomie du travail
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
INSTALLATIONS INDUSTRIELLES
 Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
1. Insérez le DVD de support dans le lecteur optique. L onglet Drivers (Pilotes) apparaîtra si l Exécution automatique est activée.
 apparaîtra si l Exécution automatique est activée.") ASUS PC Probe II PC Probe II est un utilitaire qui contrôle l activité des composants cruciaux de l ordinateur ; il détecte et vous avertit de tout problème survenant sur l un de ces composants. PC Probe
ASUS PC Probe II PC Probe II est un utilitaire qui contrôle l activité des composants cruciaux de l ordinateur ; il détecte et vous avertit de tout problème survenant sur l un de ces composants. PC Probe
NOUVEAU. Les plus puissants chariots télescopiques Kramer jamais conçus. Chariots Télescopiques
 407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
DECLARATION DES PERFORMANCES N 1
 DECLARATION DES PERFORMANCES N 1 Résistance mécanique C18 EN 1912 : 2012 + EN 338 :2009 DECLARATION DES PERFORMANCES N 2 Résistance mécanique C24 EN 1912 : 2012 + EN 338 :2009 DECLARATION DES PERFORMANCES
DECLARATION DES PERFORMANCES N 1 Résistance mécanique C18 EN 1912 : 2012 + EN 338 :2009 DECLARATION DES PERFORMANCES N 2 Résistance mécanique C24 EN 1912 : 2012 + EN 338 :2009 DECLARATION DES PERFORMANCES
Ceinture Home Dépôt. Orthèse lombaire et abdominale. Mother-to-be (Medicus)
") Orthèse lombaire et abdominale Mother-to-be (Medicus) Prévention Soutient courbe lombaire Supporte poids du ventre Ajustable Soulage les maux de dos en position debout (Beaty et al. 1999) Ceinture Home
Orthèse lombaire et abdominale Mother-to-be (Medicus) Prévention Soutient courbe lombaire Supporte poids du ventre Ajustable Soulage les maux de dos en position debout (Beaty et al. 1999) Ceinture Home
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
KASTOspeed: Scies automatiques de production à lame circulaire pour le débit économique de très grandes séries dans l acier et les non-ferreux.
 KASTOspeed: Scies automatiques de production à lame circulaire pour le débit économique de très grandes séries dans l acier et les non-ferreux. Très grandes performances en un temps record: Scies automatiques
KASTOspeed: Scies automatiques de production à lame circulaire pour le débit économique de très grandes séries dans l acier et les non-ferreux. Très grandes performances en un temps record: Scies automatiques
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
Caractéristiques : Le Grand Éléphant. Le Grand Éléphant
 Sorti de l atelier de la compagnie La Machine le 1 er juillet 2007, l Éléphant a transporté en 4 ans et demi 250 000 passagers. Des centaines de milliers de visiteurs ont suivi ses déplacements au centre
Sorti de l atelier de la compagnie La Machine le 1 er juillet 2007, l Éléphant a transporté en 4 ans et demi 250 000 passagers. Des centaines de milliers de visiteurs ont suivi ses déplacements au centre
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
Elaboration de Fer à Béton
 Elaboration de Fer à Béton Cisailles électriques Combinées (cisailles-cintreuses) Cintreuses électriques Cintreuses à étriers électriques Cisailles électro-hydrauliques manuelles et lieuse de barres d
Elaboration de Fer à Béton Cisailles électriques Combinées (cisailles-cintreuses) Cintreuses électriques Cintreuses à étriers électriques Cisailles électro-hydrauliques manuelles et lieuse de barres d
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Véhicules électriques
 Véhicules électriques Marc Béranger Véhicules électriques Marc Béranger 15 juin 2012 1 Plan de la présentation Histoire de l automobile Puissance et énergie Stockage d énergie Moteur électrique Vehicle-to-grid
Véhicules électriques Marc Béranger Véhicules électriques Marc Béranger 15 juin 2012 1 Plan de la présentation Histoire de l automobile Puissance et énergie Stockage d énergie Moteur électrique Vehicle-to-grid
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE SÉRIE 8036
 A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
Astra Elite AM/3 Manuel d'installation
 1) Caractéristiques techniques Astra Elite AM/3 Manuel d'installation Alimentation : - Tension : 9 à 16 V- - Consommation : 33 ma repos/40 ma en alarme - Ondulation : 2 V c à c à 12 V- Canal Hyperfréquence
1) Caractéristiques techniques Astra Elite AM/3 Manuel d'installation Alimentation : - Tension : 9 à 16 V- - Consommation : 33 ma repos/40 ma en alarme - Ondulation : 2 V c à c à 12 V- Canal Hyperfréquence
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
MINOR 11. *2701444_rev.6* Guide d installation et d utilisation MINOR 11. DELTA DORE - Bonnemain - 35270 COMBOURG E-mail : deltadore@deltadore.
 Guide d installation et d utilisation MINOR 11 6151042 MINOR 11 DELTA DORE - Bonnemain - 35270 COMBOURG E-mail : deltadore@deltadore.com Appareil conforme aux exigences des directives : 2004/108/CE (Compatibilité
Guide d installation et d utilisation MINOR 11 6151042 MINOR 11 DELTA DORE - Bonnemain - 35270 COMBOURG E-mail : deltadore@deltadore.com Appareil conforme aux exigences des directives : 2004/108/CE (Compatibilité
Equipements de positionnement
 Equipements de positionnement Une offre complète d équipements de positionnement pr ttes les applications de sdage manuel et automatique. 2662-031R www.airliquidewelding.com Gamme de positionnement d Air
Equipements de positionnement Une offre complète d équipements de positionnement pr ttes les applications de sdage manuel et automatique. 2662-031R www.airliquidewelding.com Gamme de positionnement d Air
La technique en 7 étapes. Déroulement du mouvement. ASTA Association Suisse de Tir à l Arc. Conseil des entraîneurs
 Déroulement du mouvement 1. Position Position des pieds Jambes Hanches Buste Tête 2. Bras d arc Main d arc Point de pression Coude Bras de l arc Epaule 3. Bras de corde Prise de corde Position des doigts
Déroulement du mouvement 1. Position Position des pieds Jambes Hanches Buste Tête 2. Bras d arc Main d arc Point de pression Coude Bras de l arc Epaule 3. Bras de corde Prise de corde Position des doigts
CHARGEUSES COMPACTES À PNEU
 V270 V330 CHARGEUSES COMPACTES À PNEU À LEVAGE VERTICAL En 1859, une société spécialisée dans les équipements agricoles, basée dans une forge, était créée à West Bend, dans le Wisconsin. Après de timides
V270 V330 CHARGEUSES COMPACTES À PNEU À LEVAGE VERTICAL En 1859, une société spécialisée dans les équipements agricoles, basée dans une forge, était créée à West Bend, dans le Wisconsin. Après de timides
Trucs et astuces N o 2.1 COMMENT AJUSTER VOTRE TABLETTE PORTE-CLAVIER
 Trucs et astuces N o 2.1 COMMENT AJUSTER VOTRE TABLETTE PORTE-CLAVIER Vous reconnaissez-vous? Vous avez une tablette porte-clavier et vous savez qu elle est ajustable mais ne savez pas comment faire. Peut-être
Trucs et astuces N o 2.1 COMMENT AJUSTER VOTRE TABLETTE PORTE-CLAVIER Vous reconnaissez-vous? Vous avez une tablette porte-clavier et vous savez qu elle est ajustable mais ne savez pas comment faire. Peut-être
Depuis 1927, spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles. Contacteurs électriques
 , spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles Contacteurs électriques " tournants Pour commander Téléphone 01 48 78 81 97 Fax 01 45 96 07 90
, spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles Contacteurs électriques " tournants Pour commander Téléphone 01 48 78 81 97 Fax 01 45 96 07 90
Notions fondamentales sur le démarrage des moteurs
 Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Vélo électrique YAMAHA PAS XPC 26 Dossier technique
 Vélo électrique YAMAHA PAS XPC 26 Dossier technique DT Velo YAMAHA.doc Page 1 sur 8 Sommaire 1 LE PRODUIT... 3 2 ANALYSE FONCTIONNELLE PARTIELLE DU VELO YAMAHA XPC26... 4 2.1 RAISON D ETRE DU VELO ELECTRIQUE...
Vélo électrique YAMAHA PAS XPC 26 Dossier technique DT Velo YAMAHA.doc Page 1 sur 8 Sommaire 1 LE PRODUIT... 3 2 ANALYSE FONCTIONNELLE PARTIELLE DU VELO YAMAHA XPC26... 4 2.1 RAISON D ETRE DU VELO ELECTRIQUE...
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
AMELIORATION DE LA FIABILITE D UN MOTEUR GRÂCE AU TEST STATIQUE ET DYNAMIQUE
 AMELIORATION DE LA FIABILITE D UN MOTEUR GRÂCE AU TEST STATIQUE ET DYNAMIQUE Le test statique est un moyen très connu pour évaluer les moteurs électriques. Cependant, si un moteur ne peut pas être arreté,
AMELIORATION DE LA FIABILITE D UN MOTEUR GRÂCE AU TEST STATIQUE ET DYNAMIQUE Le test statique est un moyen très connu pour évaluer les moteurs électriques. Cependant, si un moteur ne peut pas être arreté,
Simulation Matlab/Simulink d une machine à induction triphasée. Constitution d un référentiel
 Simulation Matlab/Simulink une machine à inuction triphasée Constitution un référentiel Capocchi Laurent Laboratoire UMR CNRS 6134 Université e Corse 3 Octobre 7 1 Table es matières 1 Introuction 3 Moélisation
Simulation Matlab/Simulink une machine à inuction triphasée Constitution un référentiel Capocchi Laurent Laboratoire UMR CNRS 6134 Université e Corse 3 Octobre 7 1 Table es matières 1 Introuction 3 Moélisation
VANNE PAPILLON 1100 avec servomoteur type UVC-15
 VANNE PAPILLON 1100 avec servomoteur type UVC-15 CARACTERISTIQUES DE LA VANNE La vanne papillon 1100 à montage entre brides est une vanne papillon en PVC. Elle possède une étanchéité en ligne et au presse-étoupe
VANNE PAPILLON 1100 avec servomoteur type UVC-15 CARACTERISTIQUES DE LA VANNE La vanne papillon 1100 à montage entre brides est une vanne papillon en PVC. Elle possède une étanchéité en ligne et au presse-étoupe
Dans ce chapitre : Sommaire 93
 Dans ce chapitre : Les différents types de contractions musculaires 78 Contraction statique 78 Contraction dynamique 80 Contraction isométrique 80 Contraction auxotonique 80 Contraction isotonique 82 Contraction
Dans ce chapitre : Les différents types de contractions musculaires 78 Contraction statique 78 Contraction dynamique 80 Contraction isométrique 80 Contraction auxotonique 80 Contraction isotonique 82 Contraction
L énergie grâce à l eau ça coule de source!
 Bacheliers en Electromécanique Implantation de Seraing L énergie grâce à l eau ça coule de source! Mars 2013 - Quai Van Beneden Par B. Jansen, A. Hay, F. Laureiro, V. Rosso, E. Simon et F. Simonis Contact:
Bacheliers en Electromécanique Implantation de Seraing L énergie grâce à l eau ça coule de source! Mars 2013 - Quai Van Beneden Par B. Jansen, A. Hay, F. Laureiro, V. Rosso, E. Simon et F. Simonis Contact:
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
PENDANTS à PLAFOND Pour USI/Anesthésie
 PENDANTS à PLAFOND Pour USI/Anesthésie Rigidité maximale et grande capacité Plages d'action presque illimités Modularité avec possibilité de choix Conception ergonomique Fiche complète de prises et access.
PENDANTS à PLAFOND Pour USI/Anesthésie Rigidité maximale et grande capacité Plages d'action presque illimités Modularité avec possibilité de choix Conception ergonomique Fiche complète de prises et access.
L entreprise Page 4. Technique des engrenages Page 10. Engrenages à vis sans fin Page 14. Motoréducteurs à arbre creux Compacta Page 34
 Sommaire L entreprise Framo Morat : votre partenaire dans le domaine des solutions d entraînement sur mesure. Nous offrons une vaste gamme de produits pour un large spectre d applications dans les secteurs
Sommaire L entreprise Framo Morat : votre partenaire dans le domaine des solutions d entraînement sur mesure. Nous offrons une vaste gamme de produits pour un large spectre d applications dans les secteurs
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
OTIS. Mod. La modernisation réinventée. Plus de sécurité Plus de fiabilité Plus de confort. Et plus d attention à l environnement.
 OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE SUJET
 SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
Samuel Bassetto 04/2010
 Industrialisation Lean manufacturing 4.2 Réalisé avec V. FIGENWALD - SIEMENS Samuel Bassetto 04/2010 Plan de la partie 2 : Vers une production Lean 1. Valeur Ajoutée et Gaspillages Muda walk 2. Temps de
Industrialisation Lean manufacturing 4.2 Réalisé avec V. FIGENWALD - SIEMENS Samuel Bassetto 04/2010 Plan de la partie 2 : Vers une production Lean 1. Valeur Ajoutée et Gaspillages Muda walk 2. Temps de
Etude des Consommations Electriques et Mesures de Températures dans les bureaux d AMOES
 Etude des Consommations Electriques et Mesures de Températures dans les bureaux d AMOES 22/04/2011 AMOES Vincent Laniesse - SOMMAIRE - 1. Objectifs... 2 2. Description des bureaux... 2 3. Métrologie mise
Etude des Consommations Electriques et Mesures de Températures dans les bureaux d AMOES 22/04/2011 AMOES Vincent Laniesse - SOMMAIRE - 1. Objectifs... 2 2. Description des bureaux... 2 3. Métrologie mise
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Table des matières. Banc de test 1
 Analyse de fonctionnement du bras de lecture d'un disque dur ( Encore du brassage d'air ) v 1.00 - JP 26/11/2014 Table des matières Banc de test 1 Démontage du disque dur 1 Suppression des éléments inutiles
Analyse de fonctionnement du bras de lecture d'un disque dur ( Encore du brassage d'air ) v 1.00 - JP 26/11/2014 Table des matières Banc de test 1 Démontage du disque dur 1 Suppression des éléments inutiles
Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]
![Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]](/thumbs/20/424260.jpg "Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]") Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Prise en main. Prise en main - 0
 Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
MACHINE A SOUDER MANUEL D UTILISATION
 MACHINE A SOUDER (Réf ME056) MANUEL D UTILISATION France DETECTION SERVICES ZA LA CIGALIERE 2 84250 LE THOR Tél. 04.90.33.75.14 Fax : 04.90.33.75.17 Contact: contact@fdspro.com Web site: fdspro.com 1 Affichage
MACHINE A SOUDER (Réf ME056) MANUEL D UTILISATION France DETECTION SERVICES ZA LA CIGALIERE 2 84250 LE THOR Tél. 04.90.33.75.14 Fax : 04.90.33.75.17 Contact: contact@fdspro.com Web site: fdspro.com 1 Affichage
DOCUMENT RESSOURCE SONDES PRESENTATION
 Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIQUE : ÉLÉMENTS DE CORRIGÉ. Partie A : alimentation HTA
 ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
Colle époxydique multi usages, à 2 composants
 Notice Produit Edition 20 01 2014 Numéro 9.11 Version n 2013-310 01 04 02 03 001 0 000144 Colle époxydique multi usages, à 2 composants Description est une colle structurale thixotrope à 2 composants,
Notice Produit Edition 20 01 2014 Numéro 9.11 Version n 2013-310 01 04 02 03 001 0 000144 Colle époxydique multi usages, à 2 composants Description est une colle structurale thixotrope à 2 composants,
T500 DUAlTACH. JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence TACHYMETRE 2 CANAUX
 02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications