DOSSIER TECHNIQUE. CPGE Loritz S ciences Industrielles pour l' Ingénieur
|
|
|
- Gabrielle Legaré
- il y a 8 ans
- Total affichages :
Transcription
1 DOSSIER TECHNIQUE CPGE Loritz S ciences Industrielles pour l' Ingénieur

2


3 DÉFINITION DES AXES Le robot Ericc 3 est un robot ayant 5 axes de rotation. Ce robot anthropomorphe est utilisé en entreprise pour de nombreuses tâches différentes : collage, soudage, peinture, manutention de pièces Le bras porteur est composé de plusieurs parties : Le socle La chaise Le bras L avant-bras Le poignet La pince La figure ci-contre, relative à un autre robot, illustre les positions des axes de rotation. La définition des axes est la suivante : Axe 1 : axe de lacet, associé au paramètre 1 Axe 2 : axe d épaule, associé au paramètre 2 Axe 3 : axe de coude, associé au paramètre 3 Axe 4 : axe de poignet, associé au paramètre 4 Axe 5 : axe de pince, associé au paramètre 5

4 DESCRIPTION STRUCTURELLE Le système automatisé robot est constitué : D'un ordinateur de type PC avec le logiciel de commande, dont la fonction principale est de contrôler le robot tant au niveau de ses déplacements, qu'au niveau de son dialogue avec les périphériques, D'une carte de commande d'axes qui assure l'ensemble des asservissements. Le contrôle des axes est géré de manière autonome par le processeur local indépendamment du calculateur hôte, D'un coffret de puissance comportant notamment : Les amplificateurs de puissance, Les alimentations à partir du 220 V, Les contacteurs de commande des freins, L'électrovanne de commande de la pince pneumatique. D un robot 5 axes.

5 RÉDUCTEURS ET COEFFICIENTS Coefficient = nombre d'impulsions codeur correspondant à 1 degré sur l'axe final. PERFORMANCES ANNONCÉES Angles : Lacet : Epaule : Coude : Poignet : Pince : θ1 = ± 135 θ2 = + 90 /- 45 θ3 = - 42 /+ 47 θ4= ±90 θ5 = ± 180 Les erreurs de poursuite mini et maxi (FE-/FE+) ont été mesurées dans la configuration «bras tendu» avec une charge de 1 kg. La vitesse linéaire maximum est donnée en prenant en compte les mouvements du lacet et de l'épaule (R max = m) : contribution du lacet : m/s contribution de l'épaule : m/s ; vitesse cumulée : m/s
 : contribution du lacet : 1.")
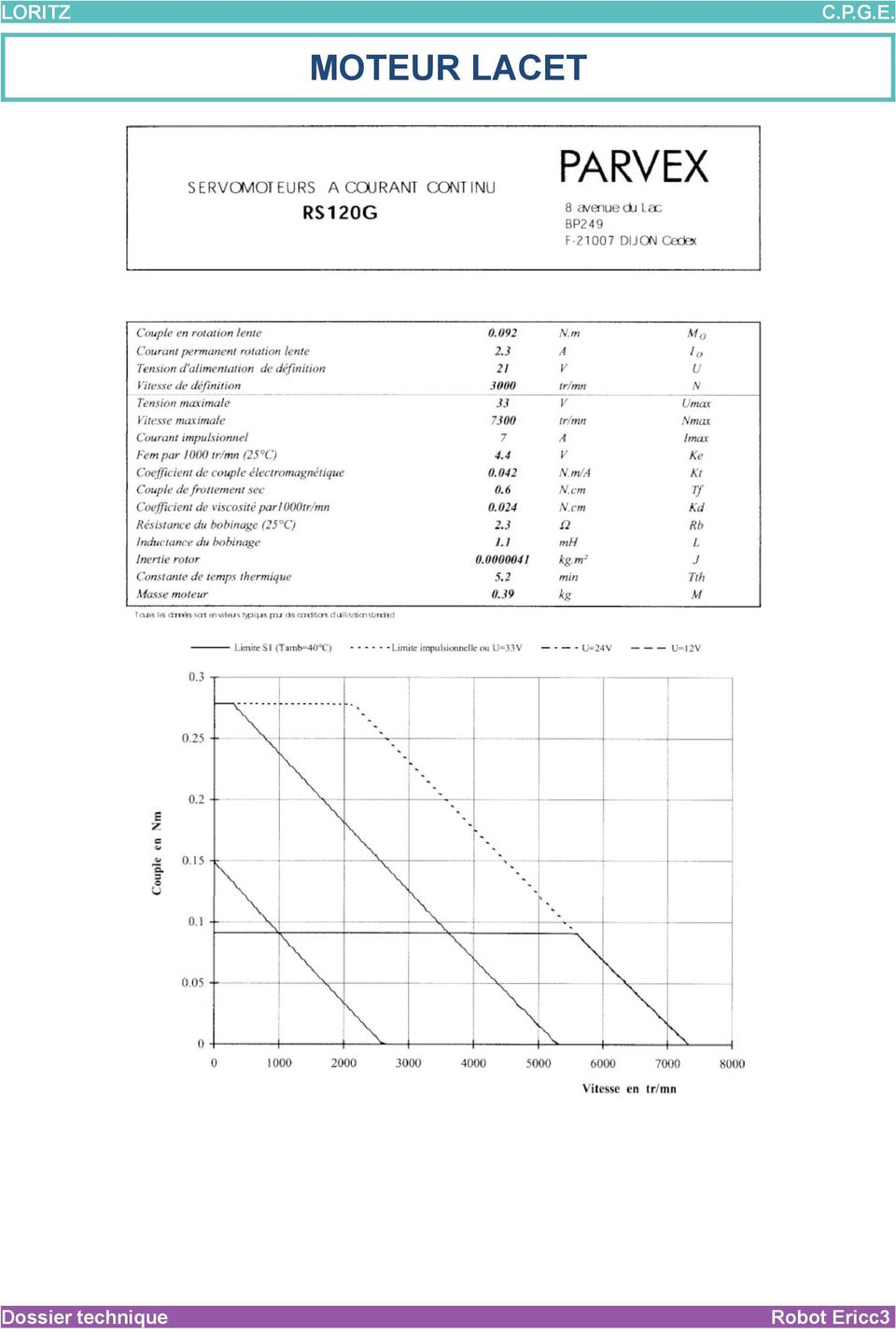
6 CARACTÉRISTIQUES DE L AXE DE LACET MOTORISATION : RS 120 G (PARVEX) Tension de définition 21.2 V Inertie du rotor Vitesse de définition 3000 tr/mn FEM par 1000 tr/mn 4.4 V Couple perm. lente Courant perm. lente Courant maxi Résistance du 2.3 Ω bobinage Constante de couple N.m/A Inductance du 1.1 mh bobinage kg.m rotation N.m rotation 2.3 A 7A Cte de temps thermique 5.2 mn Masse du moteur 0.36 kg GÉNÉRATRICE TACHYMÉTRIQUE FEM pour tr/mn Résistance V 60 Ω Inerti 0.1 e kg.m2 Mass 0.1 kg e 10-5 CODEUR K9 Pulses en 50 Inerti 0.03 standard 0 e kg.m2 Par comptage X 4 Mass 0.07 kg e 10-5 RÉDUCTEUR ASSOCIÉ : HARMONIC DRIVE Rapport : 100 Vitesse d entrée : 3500 tr/mn Avec Lub. Spéciale : 5000 tr/mn Cple sortie maxi : 7.8 N.m Inertie à l entrée : kg.cm2

7 RÉDUCTEUR LACET ÉPAULE RÉDUCTEUR COUDE

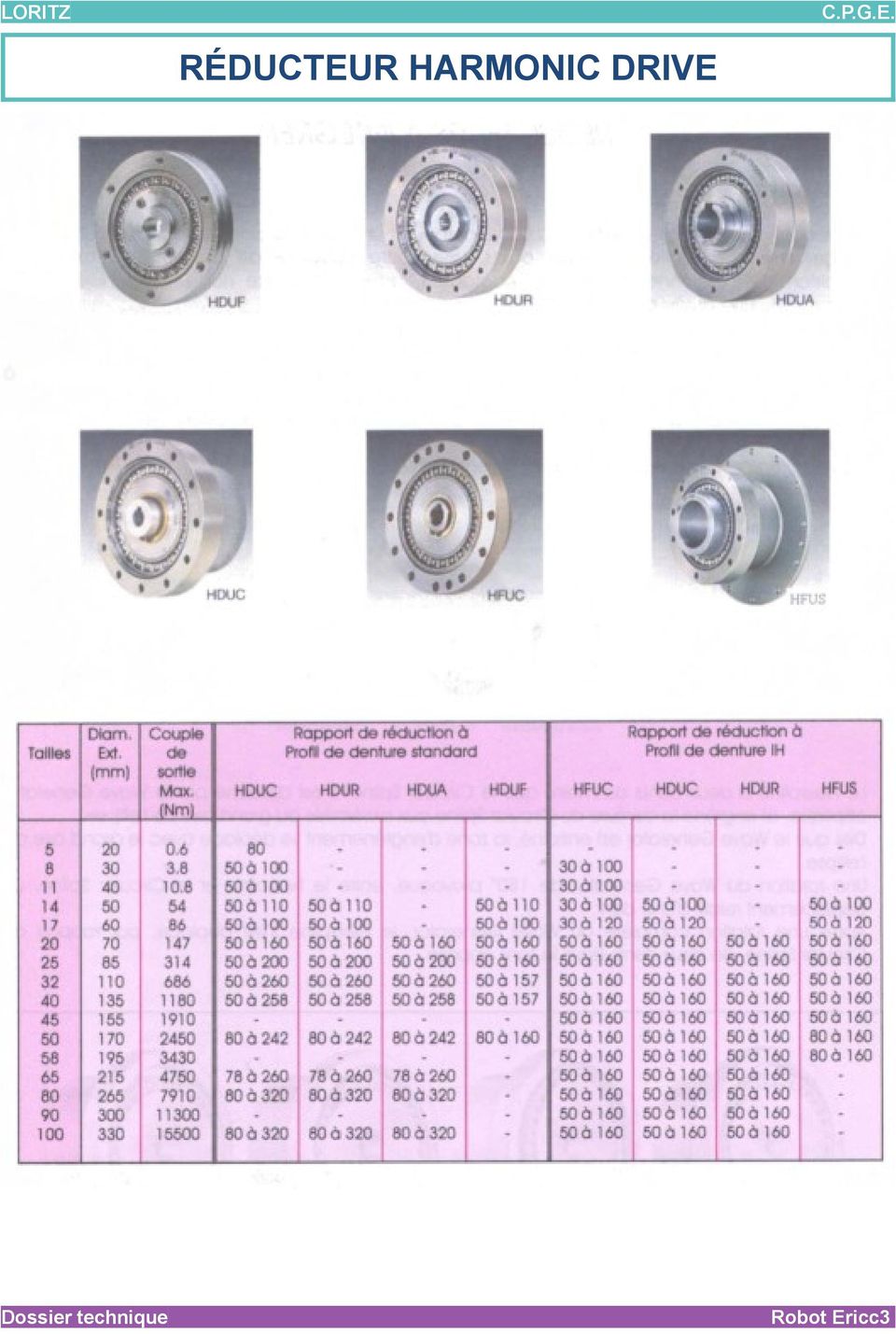
8 RÉDUCTEUR HARMONIC DRIVE

9

10 RÉDUCTEUR HARMONIC DRIVE
11 MOTEUR LACET
12 MOTEUR ÉPAULE ET COUDE
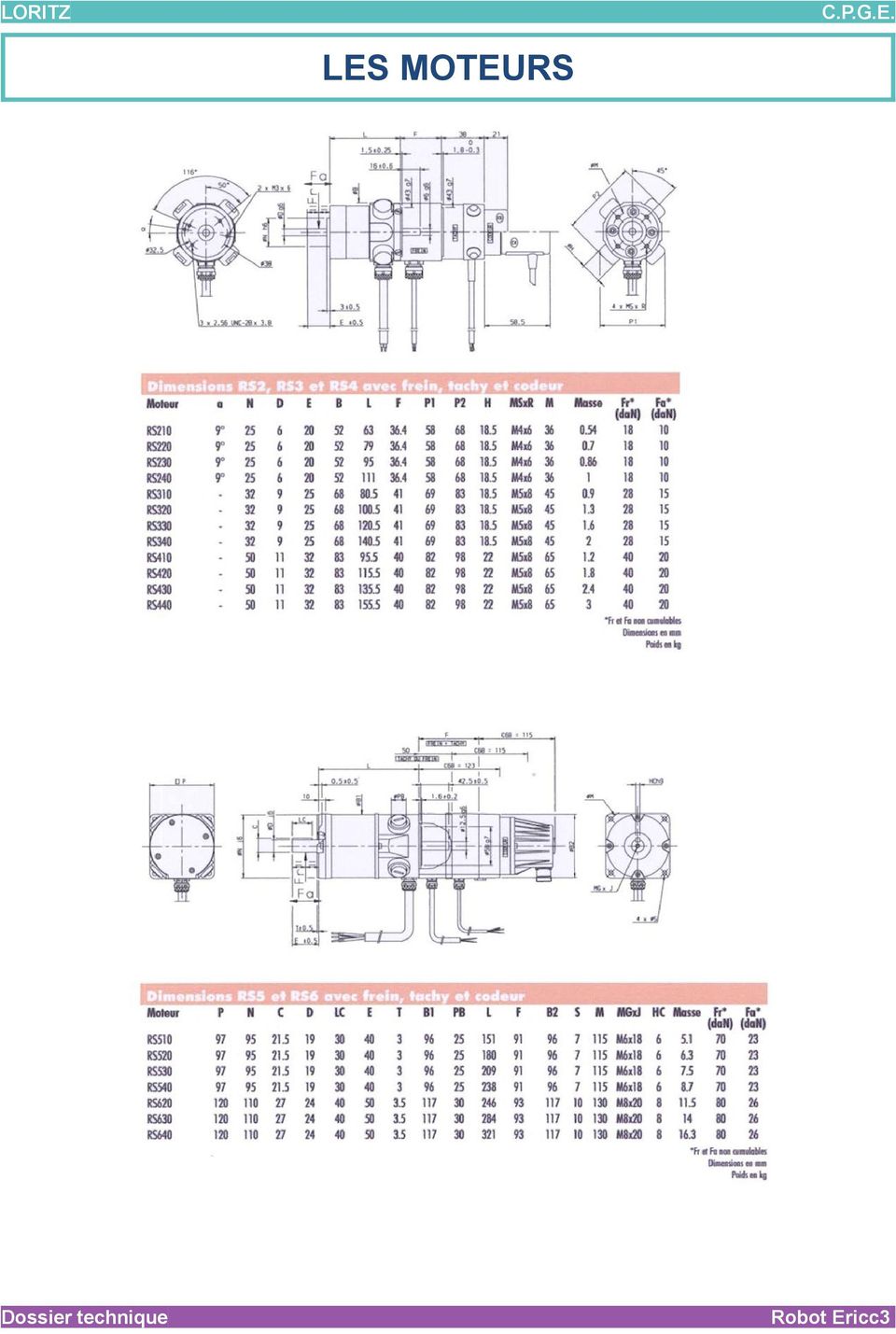
13 LES MOTEURS
14 LES MOTEURS
15 ACCESSOIRES LACET ÉPAULE COUDE
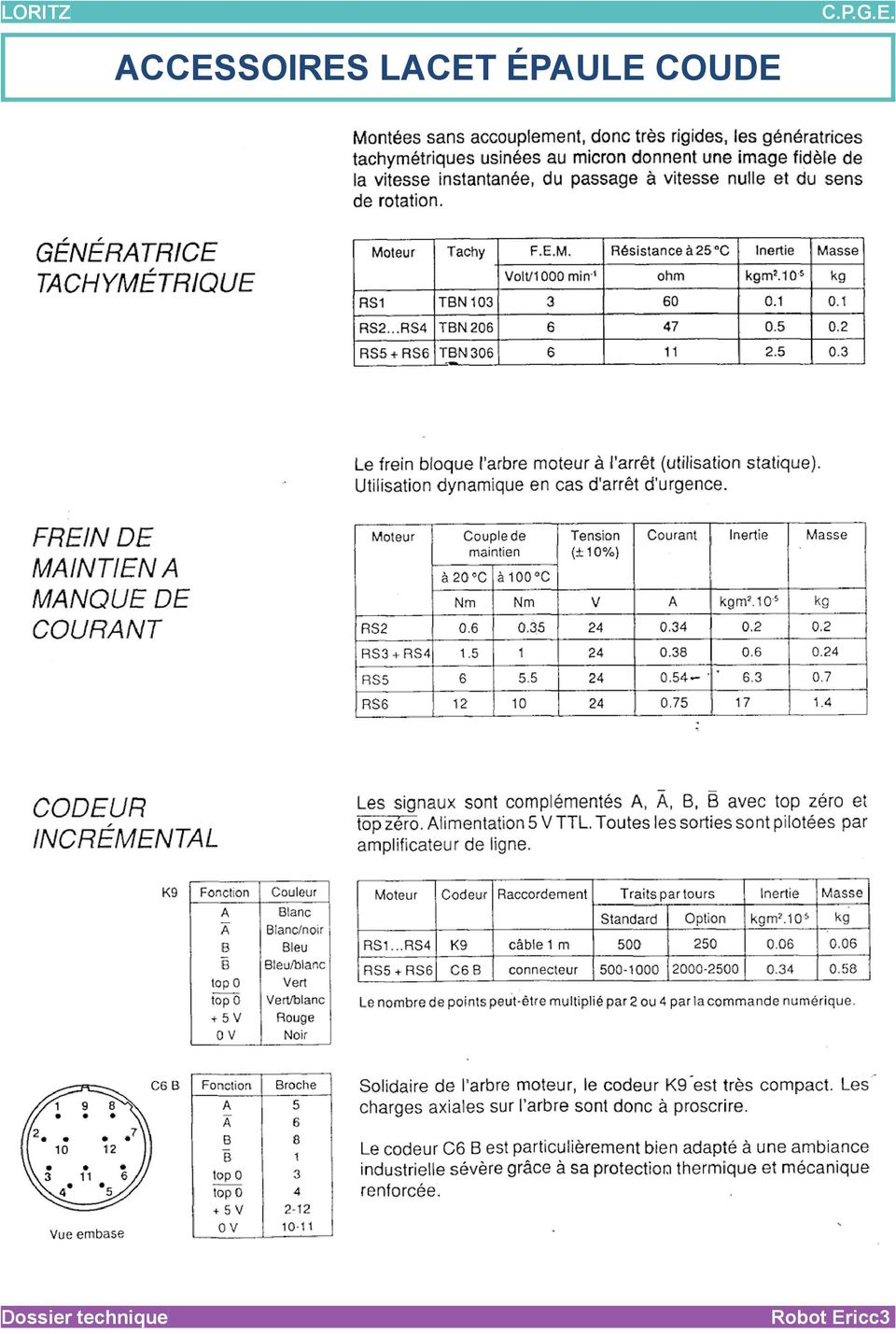
16 CODEUR INCRÉMENTAL Parvex Servo Systèmes K9 Le générateur d'impulsions opto-électronique type K9 se présente sous la forme d'un kit de très faible encombrement, ne nécessitant aucun réglage au montage. Il se compose d'un socle métallique, d'un circuit électronique à haute intégration et d'un disque gravé avec grande précision. En standard, le nombre de traits est de 500, fournissant une résolution de 2000 points par tours avec la multiplication électronique par 4 (250 traits disponibles en options). Les signaux sont complémentés avec émetteurs de ligne permettant la transmission, par câble approprié, jusqu'à 50m. Solidaire de l'arbre moteur, le codeur K9 est très compact. En conséquence, les charges axiales sur l'arbre sont a proscrire.

17 MOTEUR POIGNET

18 MOTEUR POIGNET

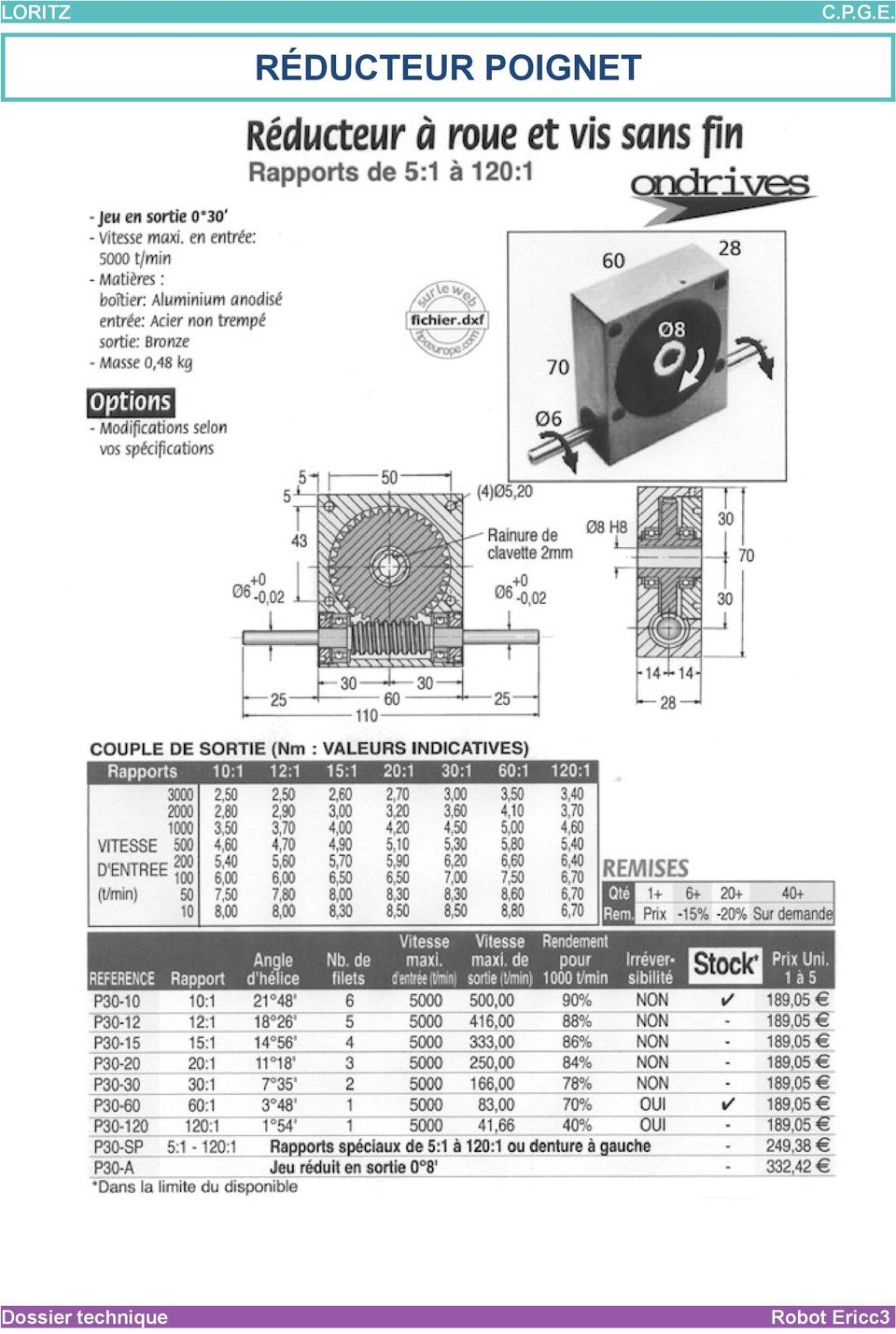
19 RÉDUCTEUR POIGNET
20 CODEUR POIGNET

21 MOTEUR PINCE
22 MOTEUR PINCE
23 RÉDUCTEUR PINCE
24 RÉDUCTEUR PINCE
25 CODEUR PINCE
26 CODEUR PINCE
27 CODEUR PINCE
28 OUVERTURE/FERMETURE DE LA PINCE
29 Matière d'œuvre entrante Informations extérieures Acquérir Traiter Communiquer Visualisations Ordres Chaîne d'informations Energies Alimenter Distribuer Convertir Transmettre Agir Grandeurs physiques Chaîne d'actions Chaîne d'énergies Système Matière d'œuvre sortante
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Entraînements personnalisés
 67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Depuis 1927, spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles. Contacteurs électriques
 , spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles Contacteurs électriques " tournants Pour commander Téléphone 01 48 78 81 97 Fax 01 45 96 07 90
, spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles Contacteurs électriques " tournants Pour commander Téléphone 01 48 78 81 97 Fax 01 45 96 07 90
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN. Machine à commande numérique destinée au tronçonnage des dés.
 MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES ETUDE D UN TRAITEMENT DE SURFACE
 TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
OTIS. Mod. La modernisation réinventée. Plus de sécurité Plus de fiabilité Plus de confort. Et plus d attention à l environnement.
 OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
Elaboration de Fer à Béton
 Elaboration de Fer à Béton Cisailles électriques Combinées (cisailles-cintreuses) Cintreuses électriques Cintreuses à étriers électriques Cisailles électro-hydrauliques manuelles et lieuse de barres d
Elaboration de Fer à Béton Cisailles électriques Combinées (cisailles-cintreuses) Cintreuses électriques Cintreuses à étriers électriques Cisailles électro-hydrauliques manuelles et lieuse de barres d
Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE
 Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Systèmes d aspiration pour plan de travail
 Systèmes d aspiration pour plan de travail Les systèmes d aspiration Nederman pour plan de travail peuvent être utilisés dans tout type d environnement en partant des postes d assemblage où des fumées
Systèmes d aspiration pour plan de travail Les systèmes d aspiration Nederman pour plan de travail peuvent être utilisés dans tout type d environnement en partant des postes d assemblage où des fumées
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
VANNE PAPILLON 1100 avec servomoteur type UVC-15
 VANNE PAPILLON 1100 avec servomoteur type UVC-15 CARACTERISTIQUES DE LA VANNE La vanne papillon 1100 à montage entre brides est une vanne papillon en PVC. Elle possède une étanchéité en ligne et au presse-étoupe
VANNE PAPILLON 1100 avec servomoteur type UVC-15 CARACTERISTIQUES DE LA VANNE La vanne papillon 1100 à montage entre brides est une vanne papillon en PVC. Elle possède une étanchéité en ligne et au presse-étoupe
Servodrives et solutions motion centric, le futur de l automation!
 Club Automation Servodrives et solutions motion centric, le futur de l automation! Laurent Maillot Schneider Electric France Fonction :Responsable marketing motion control et robotique Servodrives:Technologie/avantages
Club Automation Servodrives et solutions motion centric, le futur de l automation! Laurent Maillot Schneider Electric France Fonction :Responsable marketing motion control et robotique Servodrives:Technologie/avantages
Moteurs pas à pas Michel ABIGNOLI Clément GOELDEL Principe des moteurs pas à pas Structures et modèles de description Alimentation Commande
 Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
HELIOS UNITÉ SUSPENDUE
 HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
DRIVE-TECHNOLOGY INKOMA - GROUP. Actionneur pour panneaux solaires - ASN ALBERT
 DRIVE-TECHNOLOGY ALBERTINKOMA - GROUP Actionneur pour panneaux solaires - ASN ALBERT Maschinenfabrik ALBERT GmbH Technologiepark 2 A - 4851 Gampern (Autriche) Tél: +43/(0)7682-39080-10 Fax: +43/(0)7682-39080-99
DRIVE-TECHNOLOGY ALBERTINKOMA - GROUP Actionneur pour panneaux solaires - ASN ALBERT Maschinenfabrik ALBERT GmbH Technologiepark 2 A - 4851 Gampern (Autriche) Tél: +43/(0)7682-39080-10 Fax: +43/(0)7682-39080-99
CHARGE ACTIVE. Banc d'essais de machines tournantes. Notice d'instruction. Cette notice doit être transmise. à l'utilisateur final
 4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Machine à courant continu
 Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles
 Intérêt de la simulation En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles En développement : Aide à la prise de décision Comparer des solutions Optimiser
Intérêt de la simulation En recherche, simuler des expériences : Trop coûteuses Trop dangereuses Trop longues Impossibles En développement : Aide à la prise de décision Comparer des solutions Optimiser
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Prise en main. Prise en main - 0
 Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]
![Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]](/thumbs/20/424260.jpg "Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]") Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOUVEAU. Les plus puissants chariots télescopiques Kramer jamais conçus. Chariots Télescopiques
 407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
CENTRAL MEDIA VÉHICULE SOLAIRE PROJET. Réf. KCM 2088. Dossier de MONTAGE. et d'aide à la REALISATION. Version 2.00
 CENTRAL MEDIA PROJET Réf. Dossier de MONTAGE et d'aide à la REALISATION VÉHICULE SOLAIRE Version 2.00 AVANT PROPOS Central Média développe le thème du transport pour les cours de technologie au collège.
CENTRAL MEDIA PROJET Réf. Dossier de MONTAGE et d'aide à la REALISATION VÉHICULE SOLAIRE Version 2.00 AVANT PROPOS Central Média développe le thème du transport pour les cours de technologie au collège.
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
MEMOIRES MAGNETIQUES A DISQUES RIGIDES
 MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
Comparaison des performances d'éclairages
 Comparaison des performances d'éclairages Présentation Support pour alimenter des ampoules de différentes classes d'efficacité énergétique: une ampoule LED, une ampoule fluorescente, une ampoule à incandescence
Comparaison des performances d'éclairages Présentation Support pour alimenter des ampoules de différentes classes d'efficacité énergétique: une ampoule LED, une ampoule fluorescente, une ampoule à incandescence
LE NOUVEAU SYSTEME DE BRAS PORTEUR
 LE NOUVEAU SYSTEME DE BRAS PORTEUR 28 Même conception Charges admissibles de 600 à 1 800 N Un ensemble complet et cohérent Même design Association possible de versions différentes horizontalement et verticalement
LE NOUVEAU SYSTEME DE BRAS PORTEUR 28 Même conception Charges admissibles de 600 à 1 800 N Un ensemble complet et cohérent Même design Association possible de versions différentes horizontalement et verticalement
Caractéristiques : Le Grand Éléphant. Le Grand Éléphant
 Sorti de l atelier de la compagnie La Machine le 1 er juillet 2007, l Éléphant a transporté en 4 ans et demi 250 000 passagers. Des centaines de milliers de visiteurs ont suivi ses déplacements au centre
Sorti de l atelier de la compagnie La Machine le 1 er juillet 2007, l Éléphant a transporté en 4 ans et demi 250 000 passagers. Des centaines de milliers de visiteurs ont suivi ses déplacements au centre
MH 20/25-4 T. Buggie. Capacité 2000 kg et 2500 kg. Hauteur hors tout : moins de 2 mètres. Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw
 MH 20/25-4 T Buggie Capacité 2000 kg et 2500 kg Hauteur hors tout : moins de 2 mètres Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw Transmission hydrostatique MH 20/MH 25-4 T Buggie, les Déja novateur
MH 20/25-4 T Buggie Capacité 2000 kg et 2500 kg Hauteur hors tout : moins de 2 mètres Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw Transmission hydrostatique MH 20/MH 25-4 T Buggie, les Déja novateur
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
CRM. Registre d équilibrage et de mesure du débit, classe d étanchéité 0 ou 4.
 Registre d équilibrage et de mesure du débit, classe d étanchéité 0 ou 4. Quelques caractéristiques Méthode de mesure agréée Classe de pression A Classé d'étanchéité à l'air 0 ou 4 Facteur de fuite du
Registre d équilibrage et de mesure du débit, classe d étanchéité 0 ou 4. Quelques caractéristiques Méthode de mesure agréée Classe de pression A Classé d'étanchéité à l'air 0 ou 4 Facteur de fuite du
M HAMED EL GADDAB & MONGI SLIM
 Sous la direction : M HAMED EL GADDAB & MONGI SLIM Préparation et élaboration : AMOR YOUSSEF Présentation et animation : MAHMOUD EL GAZAH MOHSEN BEN LAMINE AMOR YOUSSEF Année scolaire : 2007-2008 RECUEIL
Sous la direction : M HAMED EL GADDAB & MONGI SLIM Préparation et élaboration : AMOR YOUSSEF Présentation et animation : MAHMOUD EL GAZAH MOHSEN BEN LAMINE AMOR YOUSSEF Année scolaire : 2007-2008 RECUEIL
RISQUES PROFESSIONNELS RISQUES MÉCANIQUES
 Hygiène Industrielle - Santé au Travail RISQUES PROFESSIONNELS Ingénieurs en Sécurité Industrielle RISQUES MÉCANIQUES I - OÙ SONT PRÉSENTS LES RISQUES MÉCANIQUES?... 1 II - QUELS SONT LES RISQUES?... 2
Hygiène Industrielle - Santé au Travail RISQUES PROFESSIONNELS Ingénieurs en Sécurité Industrielle RISQUES MÉCANIQUES I - OÙ SONT PRÉSENTS LES RISQUES MÉCANIQUES?... 1 II - QUELS SONT LES RISQUES?... 2
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
SIMPLIFIEZ-VOUS L OUVERTURE
 SIMPLIFIEZ-VOUS L OUVERTURE 1] LES AUTOMATISMES DE PORTE - DWPS10 AUTOMATISME POUR PORTE SIMPLE... P. 170 - DWPD10 AUTOMATISME POUR PORTES DOUBLES... P. 170 2] PRODUITS COMPLÉMENTAIRES ADAPTÉS AUX PERSONNES
SIMPLIFIEZ-VOUS L OUVERTURE 1] LES AUTOMATISMES DE PORTE - DWPS10 AUTOMATISME POUR PORTE SIMPLE... P. 170 - DWPD10 AUTOMATISME POUR PORTES DOUBLES... P. 170 2] PRODUITS COMPLÉMENTAIRES ADAPTÉS AUX PERSONNES
AUTOPORTE III Notice de pose
 AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Solutions de mesure et de contrôle
 Solutions de mesure et de contrôle Zelio RTC Catalogue Avril 0 Comment trouver les produits Automatismes et Contrôle Les catalogues Les Essentiels Des gammes complètes de produits Une sélection des produits
Solutions de mesure et de contrôle Zelio RTC Catalogue Avril 0 Comment trouver les produits Automatismes et Contrôle Les catalogues Les Essentiels Des gammes complètes de produits Une sélection des produits
Véhicules électriques
 Véhicules électriques Marc Béranger Véhicules électriques Marc Béranger 15 juin 2012 1 Plan de la présentation Histoire de l automobile Puissance et énergie Stockage d énergie Moteur électrique Vehicle-to-grid
Véhicules électriques Marc Béranger Véhicules électriques Marc Béranger 15 juin 2012 1 Plan de la présentation Histoire de l automobile Puissance et énergie Stockage d énergie Moteur électrique Vehicle-to-grid
PARTIE OPERATIVE PARTIE COMMANDE 1. LA PARTIE OPERATIVE ET LA PARTIE COMMANDE : 2. LEURS INTER-RELATIONS :
 1STE LES SOLUTIONS TECHNOLOGIQUES ASSOCIÉES AUX FONCTIONS L.T Mohammedia Cours STRUCTURE D UN SYSTÈME AUTOMATISÉ Prof : MAHBAB Page 1 / 3 1. LA PARTIE OPERATIVE ET LA PARTIE COMMANDE : 1.1 Présentation
1STE LES SOLUTIONS TECHNOLOGIQUES ASSOCIÉES AUX FONCTIONS L.T Mohammedia Cours STRUCTURE D UN SYSTÈME AUTOMATISÉ Prof : MAHBAB Page 1 / 3 1. LA PARTIE OPERATIVE ET LA PARTIE COMMANDE : 1.1 Présentation
Daikin. DAIKIN ALTHERMA BI-BLOC, Solution pour le tertiaire et le résidentiel collectif. Pompes à chaleur Air / Eau. Inverter. » Economies d énergie
 Pompes à chaleur Air / Eau DAIKIN ALTHERMA BI-BLOC, Solution pour le tertiaire et le résidentiel collectif Inverter 1 ère MONDIALE Daikin» Economies d énergie» Faibles émissions de CO2» Flexible» Technologie
Pompes à chaleur Air / Eau DAIKIN ALTHERMA BI-BLOC, Solution pour le tertiaire et le résidentiel collectif Inverter 1 ère MONDIALE Daikin» Economies d énergie» Faibles émissions de CO2» Flexible» Technologie
Réflexions pour une efficience énergétique optimale des convoyeurs
 Réflexions pour une efficience énergétique optimale des convoyeurs Janvier 2010 / White paper par Daniel Clénet, Make the most of your energy Sommaire Avant-propos... I Introduction... III Objectif de
Réflexions pour une efficience énergétique optimale des convoyeurs Janvier 2010 / White paper par Daniel Clénet, Make the most of your energy Sommaire Avant-propos... I Introduction... III Objectif de
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX
 UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX PLAN
UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX PLAN
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
NORSPRAY EQUIPEMENT DE PULVERISATION HAUTE PRESSION
 NORSPRAY EQUIPEMENT DE PULVERISATION HAUTE PRESSION NORSPRAY Les atouts techniques NOREXCO NOREXCO Les équipements de pulvérisation haute pression NORSPRAY ont été développés pour répondre aux besoins
NORSPRAY EQUIPEMENT DE PULVERISATION HAUTE PRESSION NORSPRAY Les atouts techniques NOREXCO NOREXCO Les équipements de pulvérisation haute pression NORSPRAY ont été développés pour répondre aux besoins
H E L I O S - S T E N H Y
 Générateurs Electriques Hybrides 100% prêts à l'emploi H E L I O S - S T E N H Y E C O - U P S - SI & H E L I O S - P A D - 2 5 0 - SC- 24 H E L I O S - S P V - 6 E T 9 Modèles présentés: HELIOS-STENHY-SI-3000-220-..+HELIOS-PAD-750-SR-48
Générateurs Electriques Hybrides 100% prêts à l'emploi H E L I O S - S T E N H Y E C O - U P S - SI & H E L I O S - P A D - 2 5 0 - SC- 24 H E L I O S - S P V - 6 E T 9 Modèles présentés: HELIOS-STENHY-SI-3000-220-..+HELIOS-PAD-750-SR-48
CATALOGUE Tarifs UNE MOTORISATION EXTERIEURE POUR L ENSEMBLE DE NOTRE GAMME. BORNES ESCAMOTABLES Accès
 CATALOGUE Tarifs 2007 UNE MOTORISATION EXTERIEURE POUR L ENSEMBLE DE NOTRE GAMME BORNES ESCAMOTABLES Accès Borne mécanique MAHAUT Pièces en acier peintes : Ø 245 mm Tête de borne Collier guide Pièces en
CATALOGUE Tarifs 2007 UNE MOTORISATION EXTERIEURE POUR L ENSEMBLE DE NOTRE GAMME BORNES ESCAMOTABLES Accès Borne mécanique MAHAUT Pièces en acier peintes : Ø 245 mm Tête de borne Collier guide Pièces en
Modules d automatismes simples
 Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Fronius IG. Onduleurs centraux PV POWERING YOUR FUTURE
 Fronius IG Onduleurs centraux PV POWERING YOUR FUTURE GÉNIAL! AVOIR SA PROPRE CENTRALE SOLAIRE La technique photovoltaïque a le vent en poupe! La nature s'en réjouit, les bilans énergétiques aussi. La
Fronius IG Onduleurs centraux PV POWERING YOUR FUTURE GÉNIAL! AVOIR SA PROPRE CENTRALE SOLAIRE La technique photovoltaïque a le vent en poupe! La nature s'en réjouit, les bilans énergétiques aussi. La
Le transistor bipolaire
 IUT Louis Pasteur Mesures Physiques Electronique Analogique 2ème semestre 3ème partie Damien JACOB 08-09 Le transistor bipolaire I. Description et symboles Effet transistor : effet physique découvert en
IUT Louis Pasteur Mesures Physiques Electronique Analogique 2ème semestre 3ème partie Damien JACOB 08-09 Le transistor bipolaire I. Description et symboles Effet transistor : effet physique découvert en
LES CAPTEURS TOUT OU RIEN
 LES CAPTEURS TOUT OU RIEN SOMMAIRE Généralités...3 Caractéristiques générales...4 Les capteurs mécaniques : principe...5 Les capteurs mécaniques : avantages et utilisation...6 Les capteurs mécaniques :
LES CAPTEURS TOUT OU RIEN SOMMAIRE Généralités...3 Caractéristiques générales...4 Les capteurs mécaniques : principe...5 Les capteurs mécaniques : avantages et utilisation...6 Les capteurs mécaniques :
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
KASTOspeed: Scies automatiques de production à lame circulaire pour le débit économique de très grandes séries dans l acier et les non-ferreux.
 KASTOspeed: Scies automatiques de production à lame circulaire pour le débit économique de très grandes séries dans l acier et les non-ferreux. Très grandes performances en un temps record: Scies automatiques
KASTOspeed: Scies automatiques de production à lame circulaire pour le débit économique de très grandes séries dans l acier et les non-ferreux. Très grandes performances en un temps record: Scies automatiques
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE SÉRIE 8036
 A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
protection incendie Ouvrant de façade : Orcades
 protection incendie Ouvrant de façade : Orcades FTE 502 130 D Mai 2011 Orcades ouvrant de façade d amenée d air Avantages Esthétique soignée (grille Cyclades en façade intérieure en option). Bonne isolation
protection incendie Ouvrant de façade : Orcades FTE 502 130 D Mai 2011 Orcades ouvrant de façade d amenée d air Avantages Esthétique soignée (grille Cyclades en façade intérieure en option). Bonne isolation
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
Notice complémentaire. Centrage. pour VEGAFLEX série 80. Document ID: 44967
 Notice complémentaire Centrage pour VEGAFLEX série 80 Document ID: 44967 Table des matières Table des matières 1 Description du produit 1.1 Aperçu... 3 1.2 Centrages... 3 2 Montage 2.1 Remarques générales...
Notice complémentaire Centrage pour VEGAFLEX série 80 Document ID: 44967 Table des matières Table des matières 1 Description du produit 1.1 Aperçu... 3 1.2 Centrages... 3 2 Montage 2.1 Remarques générales...
LE MICRO ORDINATEUR. Introduction Architecture Les supports amovibles Les composants Le système d exploitation Les portables
 LIONEL FRANC Introduction Architecture Les supports amovibles Les composants Le système d exploitation Les portables L'INTRODUCTION Micro ordinateur portable ou fixe Système pluri- technologiques (mécanique,
LIONEL FRANC Introduction Architecture Les supports amovibles Les composants Le système d exploitation Les portables L'INTRODUCTION Micro ordinateur portable ou fixe Système pluri- technologiques (mécanique,
INSTALLATIONS INDUSTRIELLES
 Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
1. Les différents types de postes de livraison On peut classer les postes HTA/BT en deux catégories.
 2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement