Méthodes de décomposition de domaine sans recouvrement utilisation en non-linéaire et vérification en linéaire
|
|
|
- Flore Bureau
- il y a 8 ans
- Total affichages :
Transcription

1 Méthodes de décomposition de domaine sans recouvrement utilisation en non-linéaire et vérification en linéaire LMT-Cachan ENS Cachan/CNRS/UPMC/PRES UniverSud Paris 28 avril 2011 J. Pebrel, A. Parret-Fréaud Christian Rey

, besoin d utiliser des décompositions de domaine en vue du calcul parallèle.")
2 Objectif Point de vue mécanique Problèmes à grand rapport d échelle Délaminage dans les composites stratifiés (méso-modèle) Plasticité en pied d aube de turbine Grandes transformations matériaux hyperélastiques Grand nombre de ddl (> 10 6 ), besoin d utiliser des décompositions de domaine en vue du calcul parallèle. Présence de phénomènes éventuellement locaux à influence globale (redistribution de contrainte, flambage).

3 Objectif Une stratégie parallèle adaptative intégrée de calcul de structure Réutilisation de l information numérique Définition d un modèle réduit permettant d accélérer les calculs (PGD [Nouy., 2010], POD en Newton [Ryckelynck, Chinesta, Cueto, and Ammar, 2006; Kerfriden, Gosselet, Adhikari, and Bordas, 2011], ou solveurs de Krylov [Gosselet, Rey, and Pebrel, 2011]) Vérification Étape indispensable mais coûteuse qui peut être totalement parallélisée et qui pose (à terme) la question du r lage parallèle / de la re-décomposition.
![, 2010], POD en Newton [Ryckelynck, Chinesta, Cueto, and Ammar, 2006; Kerfriden, Gosselet, Adhikari, and Bordas, 2011], ou solveurs de](/docs-images/42/12614379/images/page_3.jpg "Krylov [Gosselet, Rey, and Pebrel, 2011]) Vérification Étape indispensable mais coûteuse qui peut être totalement parallélisée et qui")
4 Objectif Une stratégie parallèle adaptative intégrée de calcul de structure Non-linéarité Non-linéarité : la non-linéarité se traite par un schéma itératif (Newton, MAN, Uzawa...) qui aboutit à la résolution d une séquence de système linéaires de la taille de la structure (+ des problèmes aux points de Gauss). Décomposition de domaine : afin de découpler les calculs, les conditions d interface entre les sous-domaines sont atteintes à convergence d un processus itératif Comment imbriquer les boucles de la manière la plus pertinente? LaTIn [Ladevèze, 1985; Ladevèze and Nouy, 2003] et autres schémas [Badea, 1991; Cresta, Allix, Rey, and Guinard, 2007; Pebrel, Rey, and Gosselet, 2008].


5 Dernière remarque Deux philosophies (schématiquement) pour traiter par DD (sans recouvrement) un problème continu avec non-linéarités surfacique et volumique (A) Discrétisation EF (comportement porté par les éléments [E. cohésif...]) DD, interfaces porteuses de comportement (inconnues mécaniques propres) (B) DD, interfaces de connectivité (lieu du raccord) (D) Discrétisation (SD [U] et interfaces [U,F]) La DD permet donc une autre modélisation des non-linéarités d interface, pour comparer on peut utiliser l erreur en relation de comportement (entre A et D) et la vitesse de convergence (entre B et D). Aujourd hui on se place dans la colonne de gauche.
![..]) DD, interfaces porteuses de comportement (inconnues mécaniques propres) (B) DD, interfaces de connectivité (lieu du raccord) (D) Discrétisation (SD [U] et](/docs-images/42/12614379/images/page_5.jpg "interfaces [U,F]) La DD permet donc une autre modélisation des non-linéarités d interface, pour comparer on peut utiliser l erreur en relation de comportement")
6 Programme prévisionnel 1 Décomposition de domaine en linéaire 2 Vérification 3 DD en non-linéaire

7 Problème discrétisé global Ku = f Partition conforme en N sous-domaines Séparation ddl bord (indice b) et interne (indice i) u (s) = u (s) i u (s) b Opérateur de trace t (s) = (0 bi I bb ) : t (s) u (s) = u (s) b Introduction de la réaction nodale λ (s) des voisins sur b le bord du sous-domaine (s) 0 0 K (s) 0 u (s) = f (s) + 0 K u = f + t T λ b t (s)t λ (s) b Remarque : dualité plus rusée [Bernardi, Rebollo, and Vera, 2008], cf poster G. Desmeure à Giens
t λ (s) b Remarque : dualité plus rusée [Bernardi, Rebollo, and Vera, 2008], cf poster G.")
8 Condensation Elimination des inconnues internes K (s) ii K (s) bi u (s) i (K (s) bb K (s) ib u (s) K (s) i u (s) = f (s) bb b b = K (s) 1 (s) ii ( K ib u(s) b K(s) bi K (s) ii Complément de Schur S (s) = (K (s) bb Second membre condensé b (s) = f (s) b f (s) i + λ (s) b + f (s) i ) 1 (s) K ib ) u(s) b K(s) bi K (s) bi = f (s) b K (s) 1 (s) ii K ib ) K (s) 1 (s) ii f i K (s) bi K (s) 1 (s) ii f i Equilibre local condensé S u b Sous-domaine vu comme une boite-noire = b + λ b
 1 (s) ii f i K (s) bi K (s) 1 (s) ii f i Equilibre local condensé S u b Sous-domaine vu comme une boite-noire = b +")
9 Description des interfaces Ensemble des nœuds partagés : Γ, A (s) opérateur d injection de Γ (s) dans Γ Le principe de l action réaction s écrit : A (s) λ (s) = b ( A (s) ) λ (s) b = A λ b = 0 s Connexion entre les nœuds : Γ, A (s) opérateur satisfaisant Range(A T ) = Ker(A ) La continuité des déplacements à l interface s écrit : A (s) u (s) = A u b b = 0 s
 = Ker(A ) La continuité des déplacements à l interface s écrit : A (s) u (s) = A u b b")
10 Qq propriétés des opérateurs d assemblage Cas de deux sous-domaines : Orthogonalité : A λ b A u b = λ(1) + λ (2) b b = u(1) u (2) b b A A T = 0 Tout vecteur d interface est la combinaison d un vecteur continu et d un vecteur équilibré : x b,!(y, z) RΓ R Γ / x b en effet = A T y + A T z z = (A 1 A T ) A x b y = (A + A T ) A x b

11 Intermède sur les pseudos-inverses Le système Mx = b a une solution si b Range(M) b Ker(M T ) Une pseudo inverse de M satisfait MM + b = b, b Range(M) On peut spécifier la pseudo inverse en l associant à une optimisation, par exemple la pseudo inverse de Moore-Penrose M vérifie x = M b { x = arg min y V y V = arg min z R n Mz b M renvoie le vecteur de norme minimale qui minimise la norme du résidu.

12 Retour à la formulation DD Formulation sous-structurée condensée S u On cherche (u b = b + λ b b, λ b ) / A λ b = 0 A u b = 0 Formulation primale u b = A T u b (A S A T ) u b = A b Formulation duale λ b = A T λ b où R (s) b (A S + A T ) λ b = A S + b + A R b α R T b (A T λ b + b ) = 0 est une base du noyau de S (s)
 λ b = A S + b + A R b α R T b (A T λ b + b ) = 0 est une base du noyau")
13 Solveur primal On cherche itérativement u b défini sur Γ. A l itération k, on a S A T u b k b = λ b k A (S A T u b k b ) = r pk = A λ b k Le résidu du solveur itératif mesure le déséquilibre des efforts d interface Préconditionneur Neumann-Neumann (localement optimal) (A 1 S A T ) A T + S + A + Problème grossier Il consiste à assurer que les problèmes de Neumann sont bien posés R T A + r b pk = R T A + A λ = 0 b b k Il rajoute une composante globale au préconditionneur, il permet de satisfaire le principe de Saint-Venant, et permet l extensibilité.

14
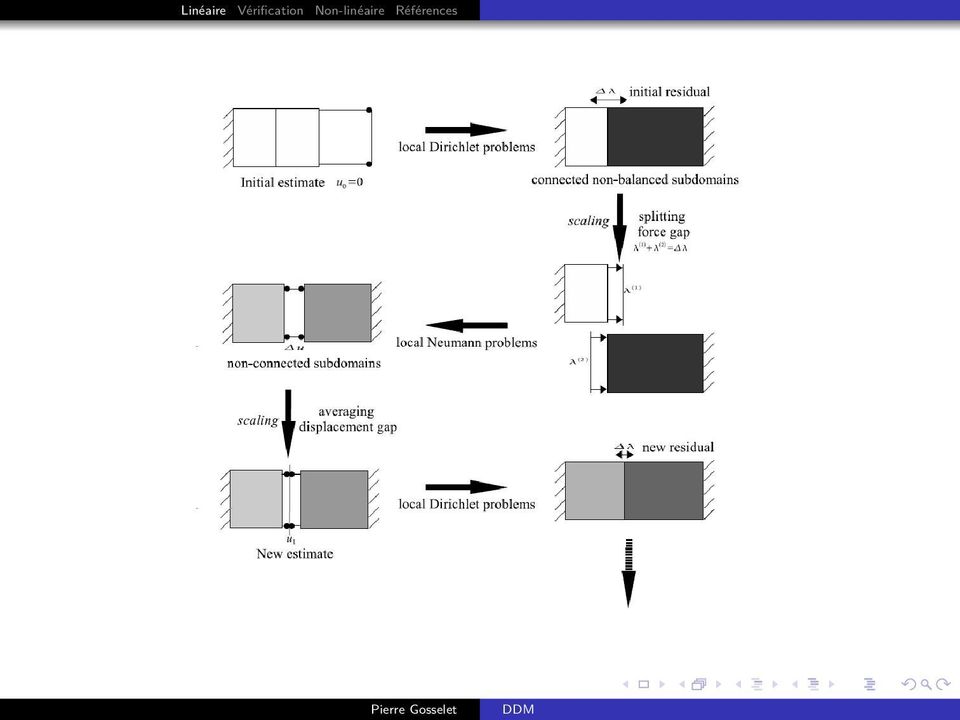
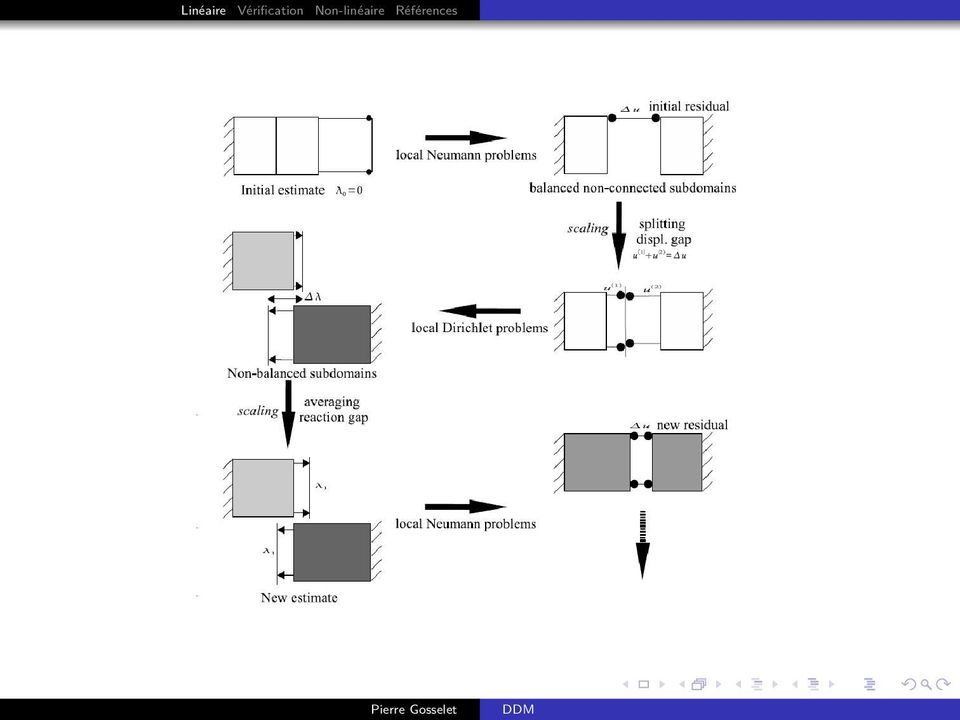
15 Solveur dual Même philosophie : on cherche itérativement un effort dans Γ (qui vérifie l action-réaction) l effort satisfait la contrainte d équilibre des sous-domaines (problème grossier) le résidu correspond au saut de déplacement entre les sous-domaines la composante rigide des déplacements α est ajustée à convergence Préconditionneur aka Dirichlet, localement optimal (A S + 1 A T ) A T + S A +

16
17 1 Décomposition de domaine en linéaire 2 Vérification 3 DD en non-linéaire

18 Vérification Rappels Pour quantifier l erreur de discrétisation, on utilise des indicateurs basés sur les défauts de régularité du champ de contrainte élément fini (ZZ2), sur les résidus d équilibre, ou sur l erreur en relation de comportement. Les deux derniers permettent d avoir des bornes garanties mais ils sont associés à des calculs très coûteux d où l intérêt de paralléliser. Lien avec les décompositions de domaine Plusieurs sources d erreur : Discrétisation (des sous-domaines) Convergence des grandeurs d interface Pour garantir l aspect conservatif de l estimation d erreur, on choisit de ne pas séparer ces sources, néanmoins on va construire un estimateur parallèle (basé sur l erreur en relation de comportement). [Parret-Fréaud, Rey, Gosselet, and Feyel, 2010]
.")
 = {u (H 1 (ω)) d, u = u 0 sur uω} Espace des champs statiquement admissibles SA(ω) = τ (L 2 (ω)) d d, τ symmetric, u")
19 Soit ω Ω. On introduit deux espaces et une forme positive : Déplacements admissibles KA (ω) = {u (H 1 (ω)) d, u = u 0 sur uω} Espace des champs statiquement admissibles SA(ω) = τ (L 2 (ω)) d d, τ symmetric, u KA 00 (ω), τ ε(u )dω = f.u dω + ω ω f ω g.u ds Mesure de la non-vérification du comportement e CR(ω) (u, σ) = σ H ε (u) H 1,ω où x H 1,ω = ω (x H 1 x) dω Le problème mécanique sur Ω est : trouver (u ex, σ ex ) KA (Ω) SA(Ω) tel que e CR(Ω) (u ex, σ ex ) = 0

20 Approximation élément fini u h KA h (Ω) σ h = H ε(u h ) Ω σ h ε(u h )dω = Ω f.u h dω + f Ω g.u h ds, u h KA00 h (Ω) donc u h KA (Ω) et e CR(Ω) (u h, σ h ) = 0 mais σ h SA(Ω) Estimation d erreur Si on déduit (û h, σ h ) KA (Ω) SA(Ω) de (u h, σ h ) ε(u ex ) ε(û h ) 2 H,Ω + σex σ h 2 H 1,Ω = (e CR(Ω)(û h, σ h )) 2 La difficulté principale réside dans le calcul d un champ σ h SA, il existe plusieurs techniques pour cela (EET, SPET...). Celles-ci requièrent de connaître les efforts continus sur les bords et font appel à des calculs sur des star-patchs. On note F h (σ h, f, g) l algorithme de calcul de champ SA sur un domaine connexe. ˆσ h = F h (σ h, f, g) SA(Ω)
. Celles-ci requièrent de connaître les efforts continus sur les bords et font appel à des calculs sur des star-patchs.")
21 En décomposition de domaine Soit u = (u (s) ) s, on pose l opérateur d assemblage global u = A(u ) u Ω (s) = u (s) Réécriture des admissibilités A(u ) KA (Ω) { u(s) KA (Ω (s) ), s tr(u (s) ) = tr(u (s ) ) on Γ (ss ), (s, s ) A(σ ) SA(Ω) { σ(s) SA(Ω (s) ), s σ (s).n (s) + σ (s ).n (s ) = 0 on Γ (ss ), (s, s ) L admissibilité globale correspond donc à une admissibilité par sous-structure et la vérification de conditions d interface Finalement si (A(ûh ), A( σ h )) KA (Ω) SA(Ω) alors (e CR(Ω) (A(û h ), A( σ h )))2 = s (e CR(Ω (s) ) (û(s), σ (s) )) 2 h h
22 Construction de champ KA A partir de u a priori discontinu aux interfaces. Calcul du saut de déplacement A u b Calcul d un champ d interface corrigé continu û b = u b à T (A u b ) avec A à T = I à T = A + Déduction d un champ de déplacement dans le sous domaine û i = K 1 ii (fi K ib û b ) Le champ (ûh ) est obtenu à l aide des fonctions de formes appliquées à û. On retrouve les calculs usuels pour appliquer l opérateur en primal et le préconditionneur en dual.
23 Construction de champ SA A partir de λ b a priori déséquilibré aux interfaces. Calcul du saut d effort A λ b Calcul d un champ d interface corrigé équilibré ˆλ b = λ b à T (A λ b ) avec A à T = I à T = A + sous la contrainte R T b (ˆλ b + b ) = 0 A l intérieur Champ de déplacement associé dans le sous-domaine ũ = K + (f + t T ˆλ b ) Calcul du champ ( σ h ) par application de la relation de comportement Sur le bord Déduction d un champ d effort continu d interface ˆλ à partir des efforts nodaux ˆλ b (interpolation des efforts d interface) Application de l algorithme σ h = F h( σ h, f, g, ˆλ ) On retrouve les calculs usuels pour appliquer l opérateur en dual et le préconditionneur en primal, avec les problèmes grossiers.
 Parallélisation totale de l utilisation de F h ( σ h, f, g, ˆλ ) L erreur de discrétisation")
24 Petit bilan Linéaire Vérification Non-linéaire Références On se greffe sur les opérations classiques des décompositions de domaine (réinterprétation du préconditionnement). Seule opération en plus : calcul d un champ d effort continu à partir d un champ discret (équilibré) Parallélisation totale de l utilisation de F h ( σ h, f, g, ˆλ ) L erreur de discrétisation peut-être estimée au cours des itérations du solveur dd A convergence l estimation dd est différente de l estimation séquentielle à cause du traitement des interfaces
25 Qualité de la reconstruction parallèle y zx (a) Chargement (b) Exemple de maillage (c) σ Von- Mises erreur dual : 2sd primal : 2sd dual : 4sd primal : 4sd dual : 8sd primal : 8sd dual : 16sd primal : 16sd dual : 32sd primal : 32sd dual : 64sd primal : 64sd sequentiel exact /h Figure: h-convergence de l erreur e h et des estimateurs e seq et eddm rdc rdc

26 Convergence de l estimateur au cours des itérations du solveur dd

27 Convergence des cartes d erreur au cours des itérations du solveur dd
28 Linéaire Vérification Non-linéaire Références Cas hétérogène, bonne inverse généralisée des assemblages (scaling) y zx y zx (a) Description (b) Exemple de maillage 5 sd 9 sd 18 sd 36 sd séquentiel exact erreur (c) σ Von-Mises /h Figure: h-convergence de l erreur eh et des estimateurs e seq et e ddm rdc rdc
29 Deuxième bilan L estimateur en DD est d une qualité comparable avec l estimateur séquentiel (pour un temps divisé par N) Les cartes d erreur obtenues sont très semblables à l estimateur séquentiel Pour les certains cas hétérogènes l estimateur DD est meilleur que le séquentiel (une amélioration a été proposée pour la méthode EET) Si l interface est très chahutée l estimateur DD peut être moins bon (travail en cours) On observe que l erreur de discrétisation converge rapidement par rapport au solveur DD : l estimateur est d abord piloté par la qualité des champs d interface puis rapidement l erreur de discrétisation devient prépondérante. On cherche à en déduire de nouveaux critères d arrêt pour les solveurs par décomposition de domaine.
30 1 Décomposition de domaine en linéaire 2 Vérification 3 DD en non-linéaire
31 Cas non-linéaire discrétisé Problème global On se place dans le cadre d un problème HPP, sur un incrément le problème s écrit : f int (u) + f ext = 0 l histoire (variables internes) est masquée mais ne pose pas de problème Résolution classique Utilisation d un solveur de Newton f int u (u k)δu = (f int (u k ) + f ext) u k+1 = u k + δu La résolution peut être très ralentie si un phénomène méchant même localisé se passe [Cresta et al., 2007], et à chaque fois on doit résoudre un système linéaire global (éventuellement par DD [Farhat, Pierson, and Lesoine, 2000]).
32 Cas non-linéaire discrétisé Problème global On se place dans le cadre d un problème HPP, sur un incrément le problème s écrit : f int (u) + f ext = 0 l histoire (variables internes) est masquée mais ne pose pas de problème Version sous-structurée Trouver (u, λ ) tel que b f int (u ) + f ext + t T λ b = 0 A λ b = 0 A u b = 0 où la dépendance est locale f (s) int (u(s) )
33 Condensation primale Trouver u b R Γ tel que f int (u ) + f ext + t T λ b = 0 t u = A T u b A λ b = 0 Si le système local (de Dirichlet) possède une seule solution, on peut définir un opérateur S (s) nl λ (s) b = S (s) (A (s)t u nl b ; f (s) ext ) Cet opérateur est une version non-linéaire du complément de Schur ; il calcule la réaction associée à un déplacement imposé. Dans le cas linéaire, on a : S (s) l (u (s) b ; f(s) Le problème non-linéaire condensé primal s écrit ext ) = S(s) t u (s) b (s) Trouver u b R Γ tel que A S nl (A T u b ; f ext ) = 0
34 Condensation duale Trouver λ b R Γ tel que f int (u ) + f ext + t T A T λ b = 0 A t u = 0 Pour que le problème local (de Neumann) soit bien posé, il faut s asssurer que Alors on peut définir un opérateur D (s) nl u (s) b R T (f ext + t T A T λ b ) = 0 = D (s) (A (s)t λ nl b ; f (s) ext ) + R(s) b qui est une version non-linéaire du complément de Schur dual, il calcule le déplacement associé à une réaction imposée (à un déplacement de solide rigide près). Dans le cas linéaire on retrouve : D (s) l α(s) (λ (s) b ; f(s) ext ) = S(s)+ (λ (s) + b (s) ) b Le problème non-linéaire condensé dual s écrit Trouver λ b R Γ, α tel que A (D nl (A T λ b ; f ext ) + t R α ) = 0 R T (f ext + t T A T λ b ) = 0
35 Condensation mixte Il est possible d introduire un nouveau champ d interface µ (homogène à un effort) b qui conduit à prendre en compte des conditions de Fourier (Robin) sur les interfaces. Un paramètre est alors l impédance d interface Q b. Trouver µ b R b tel que f int (u ) t T Q b u b + t T µ b + f ext = 0 A T (A 1 Q b A T ) A µ b u b = 0 On introduit l équivalent d un complément de Schur mixte non-linéaire u (s) b = M (s) nl (µ (s) b ; f(s) ext, Q(s) b ) Trouver µ b R tel que b A T (A Q 1 b A T ) A µ b M nl (µ b ; f ext, Q b ) = 0
36 Résolution du problème non-linéaire condensé Cas primal Trouver u b R Γ tel que A S nl (A T u b ; f ext ) = 0 Application d un Newton On reconnaît A ( S nl ) A T u b u δu b = A S T nl (A ub k ; fext ) b k u b k+1 = u b k + δu b A droite, le calcul du résidu correspond à la résolution parallèle de problèmes de Dirichlet et à l évaluation du déséquilibre des réactions A gauche, l opérateur tangent est exactement un opérateur DD primal, on montre que cet opérateur se calcule par condensation de la matrice de rigidité tangente des sous-domaines
37 Premier bilan L algorithme devient Évaluation du résidu NL = calculs NL locaux // (avec différentes CL) Système tangent = système linéaire de type DD (assemblage d opérateurs locaux condensés obtenus à partir des matrices locales tangents) On a donc reporté une partie du calcul de la non-linéarité au niveau du sous-domaine. Sur le rôle des conditions aux limites En linéaire, toutes les formulations sont équivalentes. Il est possible de substituer n importe quelle formulation DD pour la résolution des systèmes tangents En non-linéaire les conditions aux limites jouent un rôle fondamental (sur l apparition d instabilité), les formulations ne sont pas équivalentes. En l absence de phénomènes critiques, toutes les formulations doivent converger vers la solution mais les performances peuvent être très variables. Pour le mixte il faut ajuster l impédance Q b [Gendre, Allix, and Gosselet, 2011]. Paramètres Plusieurs précisions sont à fixer : calcul non-linéaire local (par sous-domaine) et calcul non-linéaire global (sur l interface), calcul linéaire tangent (par un solveur de Krylov). Pour la convergence il faut mesurer le résidu sur l ensemble de la structure (conjonction des résidus locaux et d interface)
38 Résultats en primal Influence de l initialisation L initialisation ne joue pratiquement pas.
39 Influence des résolutions locales Une bonne précision locale permet de diminuer le nombre d itérations globales.
40 Influence des résolutions locales Une bonne précision locale permet de diminuer le nombre d itérations globales. Au delà d un seuil la précision du solveur de Krylov ne joue plus
41 Extensibilité Gain en temps CPU / 3 sous-domaines

42 Résultats en dual
43 Influence de l initialisation Influence sur le résidu global Influence sur le résidu local du premier sous-domaine Au delà d un seuil, la précision de l initialisation ne joue pratiquement pas
44 Sur les risques d instabilité
45 Résultats en mixte
46 Conclusion sur les DD en NL Il est donc possible de traiter un problème non-linéaire en se ramenant à la résolution de problèmes non-linéaires // par sous-domaine et de problèmes tangents de type DD. L intérêt est de résoudre moins de systèmes tangents d interface. L usage des différentes formulations (primale/duale/mixte) conduit à des performances différentes. Des preuves de convergence des méthodes doivent pouvoir être obtenues si on suppose des comportements à écrouissage positif. Dans les autres cas la forme du sous-domaine peut jouer sur la stabilité Difficulté supplémentaire en grande transformation liée à la gestion des noyaux Autre problème : redéfinition de l équilibrage de charge. Intérêt de faire de l adaptation de maillage et de décomposition.
47 Lori Badea. On the schwarz alternating method with more then two subdomains for nonlinear monotone problems. SIAM J. Numer. Anal., 28(1) : , C. Bernardi, T. Chacòn Rebollo, and E. Chacòn Vera. A feti method with a mesh independant condition number for the iteration matrix. Computer Methods in Applied Mechanics and Engineering, 197 : , P. Cresta, O. Allix, C. Rey, and S. Guinard. Nonlinear localization strategies for domain decomposition methods in structural mechanics. Computer Methods in Applied Mechanics and Engineering, 196 : , C. Farhat, K. Pierson, and M. Lesoine. The second generation feti methods and their application to the parallel solution of large-scale linear and geometracally non-linear structural analysis problems. Computer Methods in Applied Mechanics and Engineering, 184 : , L. Gendre, O. Allix, and P. Gosselet. A two-scale approximation of the schur complement and its use for non-intrusive coupling. International Journal for Numerical Methods in Engineering, early view online, P. Gosselet, C. Rey, and J. Pebrel. Total and selective reuse of krylov subspaces for the solution to a sequence of nonlinear structural problems. submitted to International Journal for Numerical Methods in Engineering, P. Kerfriden, P. Gosselet, S. Adhikari, and S. Bordas. Bridging proper orthogonal decomposition methods and augmented newton-krylov algorithms : an adaptive model order reduction for highly nonlinear mechanical problems. Computer Methods in Applied Mechanics and Engineering, 200(5-8) : , P. Ladevèze. Sur une famille d algorithmes en mécanique des structures. Compte rendu de l académie des Sciences, 300(2) :41 44, P. Ladevèze and A. Nouy. On a multiscale computational strategy with time and space homogenization for structural mechanics. Computer Methods in Applied Mechanics and Engineering, 192 : , A. Nouy. A priori model reduction through proper generalized decomposition for solving time-dependent partial differential equations. Computer Methods in Applied Mechanics and Engineering, 199(23-24) : , A. Parret-Fréaud, C. Rey, P. Gosselet, and F. Feyel. Fast estimation of discretization error for fe problems solved by domain decomposition. Computer Methods in Applied Mechanics and Engineering, 199(49-52) : , J. Pebrel, C. Rey, and P. Gosselet. A nonlinear dual domain decomposition method : application to structural problems with damage. International Journal for Multiscale Computational Engineering, 6(3) : , D. Ryckelynck, F. Chinesta, E. Cueto, and A. Ammar. On the "a priori" model reduction : Overview and recent developments. Archives of Computational Methods in Engineering, 13 :91 128, 2006.
48 Publicité Giens 2011 Linéaire Vérification Non-linéaire Références L. Gendre : application des DD dans un cadre non-intrusif (avec O. Allix) K. Saavedra : calcul multiéchelle (LaTIn) de l interaction flambage-délaminage dans les composites (avec O. Allix) A. Parret-Fréaud : vérification et DD (avec C. Rey) G. Desmeure : représentation des interefforts en DD (LaTIn) (avec C. Rey) P. Kerfriden (U. Cardiff) : réduction de modèle POD/Krylov pour la fissuration La plénière de Christian
Happy birthday ZSet High performance computing dans ZSet
 Happy birthday ZSet High performance computing dans ZSet F. Feyel & P. Gosselet Architectures SMP NUMA memory memory memory Distribué memory memory 2 memory memory Hybride memory memory memory memory memory
Happy birthday ZSet High performance computing dans ZSet F. Feyel & P. Gosselet Architectures SMP NUMA memory memory memory Distribué memory memory 2 memory memory Hybride memory memory memory memory memory
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Quantification et hiérarchisation des incertitudes dans un processus de simulation numérique
 Proposition de thèse CIFRE CERMICS-EDF Quantification et hiérarchisation des incertitudes dans un processus de simulation numérique 13 Janvier 2015 1 Contexte industriel et problématique En tant qu équipement
Proposition de thèse CIFRE CERMICS-EDF Quantification et hiérarchisation des incertitudes dans un processus de simulation numérique 13 Janvier 2015 1 Contexte industriel et problématique En tant qu équipement
La méthode des éléments finis et le contrôle des calculs
 Table des matières Techniques Avancées en Calcul des Structures Cours d option La méthode des éléments finis et le contrôle des calculs J.-P. Pelle ENS - Cachan Master MIS Parcours TACS Année universitaire
Table des matières Techniques Avancées en Calcul des Structures Cours d option La méthode des éléments finis et le contrôle des calculs J.-P. Pelle ENS - Cachan Master MIS Parcours TACS Année universitaire
Rupture et plasticité
 Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Calculs et Certificats de Quantités d Intérêts Non Linéaires d un Mousqueton Cédric Bellis
 Ecole Normale Supérieure de Cachan Département de Génie Mécanique Rapport de Stage de M1 Mécanique et Ingéniérie des Systèmes Stage effectué du 10/04 au 27/08 Laboratori de Càlcul Numèric - Universitat
Ecole Normale Supérieure de Cachan Département de Génie Mécanique Rapport de Stage de M1 Mécanique et Ingéniérie des Systèmes Stage effectué du 10/04 au 27/08 Laboratori de Càlcul Numèric - Universitat
Résolution de systèmes linéaires par des méthodes directes
 Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE
 ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
T.P. FLUENT. Cours Mécanique des Fluides. 24 février 2006 NAZIH MARZOUQY
 T.P. FLUENT Cours Mécanique des Fluides 24 février 2006 NAZIH MARZOUQY 2 Table des matières 1 Choc stationnaire dans un tube à choc 7 1.1 Introduction....................................... 7 1.2 Description.......................................
T.P. FLUENT Cours Mécanique des Fluides 24 février 2006 NAZIH MARZOUQY 2 Table des matières 1 Choc stationnaire dans un tube à choc 7 1.1 Introduction....................................... 7 1.2 Description.......................................
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Figure 3.1- Lancement du Gambit
 3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU
 $SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES fabien.figueres@mpsa.com 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES fabien.figueres@mpsa.com 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Une approche statique quasi-périodique de la capacité portante des groupes de micropieux
 Une approche statique quasi-périodique de la capacité portante des groupes de micropieux Zied Kammoun 1, Joseph Pastor 2, Hichem Smaoui 3 1 Université de Tunis El Manar, Ecole Nationale d Ingénieurs de
Une approche statique quasi-périodique de la capacité portante des groupes de micropieux Zied Kammoun 1, Joseph Pastor 2, Hichem Smaoui 3 1 Université de Tunis El Manar, Ecole Nationale d Ingénieurs de
LES MÉTHODES DE POINT INTÉRIEUR 1
 Chapitre XIII LES MÉTHODES DE POINT INTÉRIEUR 1 XIII.1 Introduction Nous débutons par un rappel de la formulation standard d un problème d optimisation 2 linéaire et donnons un bref aperçu des différences
Chapitre XIII LES MÉTHODES DE POINT INTÉRIEUR 1 XIII.1 Introduction Nous débutons par un rappel de la formulation standard d un problème d optimisation 2 linéaire et donnons un bref aperçu des différences
Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions.
 Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Problèmes mathématiques de la mécanique/mathematical problems in Mechanics Modèles bi-dimensionnels de coques linéairement élastiques: Estimations de l écart entre leurs solutions. Cristinel Mardare Laboratoire
Chp. 4. Minimisation d une fonction d une variable
 Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Calculer avec Sage. Revision : 417 du 1 er juillet 2010
 Calculer avec Sage Alexandre Casamayou Guillaume Connan Thierry Dumont Laurent Fousse François Maltey Matthias Meulien Marc Mezzarobba Clément Pernet Nicolas Thiéry Paul Zimmermann Revision : 417 du 1
Calculer avec Sage Alexandre Casamayou Guillaume Connan Thierry Dumont Laurent Fousse François Maltey Matthias Meulien Marc Mezzarobba Clément Pernet Nicolas Thiéry Paul Zimmermann Revision : 417 du 1
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Optimisation Discrète
 Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Manuel de validation Fascicule v4.25 : Thermique transitoire des structures volumiques
 Titre : TTLV100 - Choc thermique dans un tuyau avec condit[...] Date : 02/03/2010 Page : 1/10 Manuel de Validation Fascicule V4.25 : Thermique transitoire des structures volumiques Document : V4.25.100
Titre : TTLV100 - Choc thermique dans un tuyau avec condit[...] Date : 02/03/2010 Page : 1/10 Manuel de Validation Fascicule V4.25 : Thermique transitoire des structures volumiques Document : V4.25.100
1 Introduction et modèle mathématique
 Optimisation parallèle et mathématiques financières Optimisation parallèle et mathématiques financières Pierre Spiteri 1 IRIT ENSEEIHT, UMR CNRS 5505 2 rue Charles Camichel, B.P. 7122 F-31 071 Toulouse,
Optimisation parallèle et mathématiques financières Optimisation parallèle et mathématiques financières Pierre Spiteri 1 IRIT ENSEEIHT, UMR CNRS 5505 2 rue Charles Camichel, B.P. 7122 F-31 071 Toulouse,
Yves Debard. Université du Mans Master Modélisation Numérique et Réalité Virtuelle. http://iut.univ-lemans.fr/ydlogi/index.html
 Méthode des éléments finis : élasticité à une dimension Yves Debard Université du Mans Master Modélisation Numérique et Réalité Virtuelle http://iut.univ-lemans.fr/ydlogi/index.html 4 mars 6 9 mars 11
Méthode des éléments finis : élasticité à une dimension Yves Debard Université du Mans Master Modélisation Numérique et Réalité Virtuelle http://iut.univ-lemans.fr/ydlogi/index.html 4 mars 6 9 mars 11
Interaction Fluide-Structure pour les corps élancés
 Interaction Fluide-Structure pour les corps élancés DE NAYER GUILLAUME a, LEROYER ALBAN a, VISONNEAU MICHEL a, BOYER FRÉDÉRIC b a: Laboratoire de Mécanique des Fluides (LMF) UMR-CNRS 698, Ecole Centrale
Interaction Fluide-Structure pour les corps élancés DE NAYER GUILLAUME a, LEROYER ALBAN a, VISONNEAU MICHEL a, BOYER FRÉDÉRIC b a: Laboratoire de Mécanique des Fluides (LMF) UMR-CNRS 698, Ecole Centrale
Grandes lignes ASTRÉE. Logiciels critiques. Outils de certification classiques. Inspection manuelle. Definition. Test
 Grandes lignes Analyseur Statique de logiciels Temps RÉel Embarqués École Polytechnique École Normale Supérieure Mercredi 18 juillet 2005 1 Présentation d 2 Cadre théorique de l interprétation abstraite
Grandes lignes Analyseur Statique de logiciels Temps RÉel Embarqués École Polytechnique École Normale Supérieure Mercredi 18 juillet 2005 1 Présentation d 2 Cadre théorique de l interprétation abstraite
Asynchronisme : Cadres continu et discret
 N d ordre : 151 Année 2006 HABILITATION À DIRIGER DES RECHERCHES UNIVERSITÉ DE FRANCHE-COMTÉ Spécialité Informatique présentée par Sylvain CONTASSOT-VIVIER Docteur en Informatique Sujet Asynchronisme :
N d ordre : 151 Année 2006 HABILITATION À DIRIGER DES RECHERCHES UNIVERSITÉ DE FRANCHE-COMTÉ Spécialité Informatique présentée par Sylvain CONTASSOT-VIVIER Docteur en Informatique Sujet Asynchronisme :
ANALYSE CATIA V5. 14/02/2011 Daniel Geffroy IUT GMP Le Mans
 ANALYSE CATIA V5 1 GSA Generative Structural Analysis 2 Modèle géométrique volumique Post traitement Pré traitement Maillage Conditions aux limites 3 Ouverture du module Choix du type d analyse 4 Calcul
ANALYSE CATIA V5 1 GSA Generative Structural Analysis 2 Modèle géométrique volumique Post traitement Pré traitement Maillage Conditions aux limites 3 Ouverture du module Choix du type d analyse 4 Calcul
Prise en compte de la flexibilité des cas de charges dimensionnants en optimisation de structure
 CSMA 213 11e Colloque National en Calcul des Structures 13-17 Mai 213 Prise en compte de la flexibilité des cas de charges dimensionnants en optimisation de structure Dimitri BETTEBGHOR 1, Christophe BLONDEAU
CSMA 213 11e Colloque National en Calcul des Structures 13-17 Mai 213 Prise en compte de la flexibilité des cas de charges dimensionnants en optimisation de structure Dimitri BETTEBGHOR 1, Christophe BLONDEAU
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Programmation linéaire et Optimisation. Didier Smets
 Programmation linéaire et Optimisation Didier Smets Chapitre 1 Un problème d optimisation linéaire en dimension 2 On considère le cas d un fabricant d automobiles qui propose deux modèles à la vente, des
Programmation linéaire et Optimisation Didier Smets Chapitre 1 Un problème d optimisation linéaire en dimension 2 On considère le cas d un fabricant d automobiles qui propose deux modèles à la vente, des
NOTICE DOUBLE DIPLÔME
 NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
Optimisation et programmation mathématique. Professeur Michel de Mathelin. Cours intégré : 20 h
 Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Méthode de l équilibrage harmonique généralisé
 Méthode de l équilibrage harmonique généralisé Application à l interaction modale rotor/stator Sébastien Roques * Mathias Legrand * Christophe Pierre ** Bernard Peseux * Patrice Cartraud * * GeM, Pôle
Méthode de l équilibrage harmonique généralisé Application à l interaction modale rotor/stator Sébastien Roques * Mathias Legrand * Christophe Pierre ** Bernard Peseux * Patrice Cartraud * * GeM, Pôle
Approximations variationelles des EDP Notes du Cours de M2
 Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
CONCOURS D ENTREE A L ECOLE DE 2007 CONCOURS EXTERNE. Cinquième épreuve d admissibilité STATISTIQUE. (durée : cinq heures)
") CONCOURS D ENTREE A L ECOLE DE 2007 CONCOURS EXTERNE Cinquième épreuve d admissibilité STATISTIQUE (durée : cinq heures) Une composition portant sur la statistique. SUJET Cette épreuve est composée d un
CONCOURS D ENTREE A L ECOLE DE 2007 CONCOURS EXTERNE Cinquième épreuve d admissibilité STATISTIQUE (durée : cinq heures) Une composition portant sur la statistique. SUJET Cette épreuve est composée d un
K. Ammar, F. Bachoc, JM. Martinez. Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau
 Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
Mathématique et Automatique : de la boucle ouverte à la boucle fermée. Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans
 Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans Maitine.Bergounioux@labomath.univ-orleans.fr Plan 1. Un peu de
Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans Maitine.Bergounioux@labomath.univ-orleans.fr Plan 1. Un peu de
Multiprogrammation parallèle générique des méthodes de décomposition de domaine
 Multiprogrammation parallèle générique des méthodes de décomposition de domaine Andréa Schwertner-Charão To cite this version: Andréa Schwertner-Charão. Multiprogrammation parallèle générique des méthodes
Multiprogrammation parallèle générique des méthodes de décomposition de domaine Andréa Schwertner-Charão To cite this version: Andréa Schwertner-Charão. Multiprogrammation parallèle générique des méthodes
Condition inf-sup pour l Elément Fini de Taylor-Hood È ¾ -iso-è ½
 Condition inf-sup pour l Elément Fini de Taylor-Hood È ¾ -iso-è ½ Patrick Ciarlet et Vivette Girault ciarlet@ensta.fr & girault@ann.jussieu.fr ENSTA & Laboratoire Jacques-Louis Lions, Paris 6 Condition
Condition inf-sup pour l Elément Fini de Taylor-Hood È ¾ -iso-è ½ Patrick Ciarlet et Vivette Girault ciarlet@ensta.fr & girault@ann.jussieu.fr ENSTA & Laboratoire Jacques-Louis Lions, Paris 6 Condition
Introduction à MATLAB R
 Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Aspects théoriques et algorithmiques du calcul réparti L agglomération
 Aspects théoriques et algorithmiques du calcul réparti L agglomération Patrick CIARLET Enseignant-Chercheur UMA patrick.ciarlet@ensta-paristech.fr Françoise LAMOUR franc.lamour@gmail.com Aspects théoriques
Aspects théoriques et algorithmiques du calcul réparti L agglomération Patrick CIARLET Enseignant-Chercheur UMA patrick.ciarlet@ensta-paristech.fr Françoise LAMOUR franc.lamour@gmail.com Aspects théoriques
Les nouveautés de Femap 11.1
 Siemens PLM Software Les nouveautés de Femap 11.1 Amélioration de la productivité des Ingénieurs calcul Avantages Manipulation plus rapide des modèles grâce à des performances graphiques améliorées Flexibilité
Siemens PLM Software Les nouveautés de Femap 11.1 Amélioration de la productivité des Ingénieurs calcul Avantages Manipulation plus rapide des modèles grâce à des performances graphiques améliorées Flexibilité
Exercices Corrigés Premières notions sur les espaces vectoriels
 Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Introduction. I Étude rapide du réseau - Apprentissage. II Application à la reconnaissance des notes.
 Introduction L'objectif de mon TIPE est la reconnaissance de sons ou de notes de musique à l'aide d'un réseau de neurones. Ce réseau doit être capable d'apprendre à distinguer les exemples présentés puis
Introduction L'objectif de mon TIPE est la reconnaissance de sons ou de notes de musique à l'aide d'un réseau de neurones. Ce réseau doit être capable d'apprendre à distinguer les exemples présentés puis
4.2 Unités d enseignement du M1
 88 CHAPITRE 4. DESCRIPTION DES UNITÉS D ENSEIGNEMENT 4.2 Unités d enseignement du M1 Tous les cours sont de 6 ECTS. Modélisation, optimisation et complexité des algorithmes (code RCP106) Objectif : Présenter
88 CHAPITRE 4. DESCRIPTION DES UNITÉS D ENSEIGNEMENT 4.2 Unités d enseignement du M1 Tous les cours sont de 6 ECTS. Modélisation, optimisation et complexité des algorithmes (code RCP106) Objectif : Présenter
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
physicien diplômé EPFZ originaire de France présentée acceptée sur proposition Thèse no. 7178
 Thèse no. 7178 PROBLEMES D'OPTIMISATION DANS LES SYSTEMES DE CHAUFFAGE A DISTANCE présentée à l'ecole POLYTECHNIQUE FEDERALE DE ZURICH pour l'obtention du titre de Docteur es sciences naturelles par Alain
Thèse no. 7178 PROBLEMES D'OPTIMISATION DANS LES SYSTEMES DE CHAUFFAGE A DISTANCE présentée à l'ecole POLYTECHNIQUE FEDERALE DE ZURICH pour l'obtention du titre de Docteur es sciences naturelles par Alain
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Correction de l examen de la première session
 de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
Analyse statique d une pièce
 Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Chapitre XIV BASES PHYSIQUES QUANTITATIVES DES LOIS DE COMPORTEMENT MÉCANIQUE. par S. CANTOURNET 1 ELASTICITÉ
 Chapitre XIV BASES PHYSIQUES QUANTITATIVES DES LOIS DE COMPORTEMENT MÉCANIQUE par S. CANTOURNET 1 ELASTICITÉ Les propriétés mécaniques des métaux et alliages sont d un grand intérêt puisqu elles conditionnent
Chapitre XIV BASES PHYSIQUES QUANTITATIVES DES LOIS DE COMPORTEMENT MÉCANIQUE par S. CANTOURNET 1 ELASTICITÉ Les propriétés mécaniques des métaux et alliages sont d un grand intérêt puisqu elles conditionnent
Équations non linéaires
 Équations non linéaires Objectif : trouver les zéros de fonctions (ou systèmes) non linéaires, c-à-d les valeurs α R telles que f(α) = 0. y f(x) α 1 α 2 α 3 x Equations non lineaires p. 1/49 Exemples et
Équations non linéaires Objectif : trouver les zéros de fonctions (ou systèmes) non linéaires, c-à-d les valeurs α R telles que f(α) = 0. y f(x) α 1 α 2 α 3 x Equations non lineaires p. 1/49 Exemples et
Monitoring continu et gestion optimale des performances énergétiques des bâtiments
 Monitoring continu et gestion optimale des performances énergétiques des bâtiments Alexandre Nassiopoulos et al. Journée d inauguration de Sense-City, 23/03/2015 Croissance de la demande énergétique et
Monitoring continu et gestion optimale des performances énergétiques des bâtiments Alexandre Nassiopoulos et al. Journée d inauguration de Sense-City, 23/03/2015 Croissance de la demande énergétique et
Théorie et codage de l information
 Théorie et codage de l information Les codes linéaires - Chapitre 6 - Principe Définition d un code linéaire Soient p un nombre premier et s est un entier positif. Il existe un unique corps de taille q
Théorie et codage de l information Les codes linéaires - Chapitre 6 - Principe Définition d un code linéaire Soient p un nombre premier et s est un entier positif. Il existe un unique corps de taille q
Évaluation de la régression bornée
 Thierry Foucart UMR 6086, Université de Poitiers, S P 2 M I, bd 3 téléport 2 BP 179, 86960 Futuroscope, Cedex FRANCE Résumé. le modèle linéaire est très fréquemment utilisé en statistique et particulièrement
Thierry Foucart UMR 6086, Université de Poitiers, S P 2 M I, bd 3 téléport 2 BP 179, 86960 Futuroscope, Cedex FRANCE Résumé. le modèle linéaire est très fréquemment utilisé en statistique et particulièrement
Cours 02 : Problème général de la programmation linéaire
 Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
Cours 02 : Problème général de la programmation linéaire Cours 02 : Problème général de la Programmation Linéaire. 5 . Introduction Un programme linéaire s'écrit sous la forme suivante. MinZ(ou maxw) =
Cours 9. Régimes du transistor MOS
 Cours 9. Régimes du transistor MOS Par Dimitri galayko Unité d enseignement Élec-info pour master ACSI à l UPMC Octobre-décembre 005 Dans ce document le transistor MOS est traité comme un composant électronique.
Cours 9. Régimes du transistor MOS Par Dimitri galayko Unité d enseignement Élec-info pour master ACSI à l UPMC Octobre-décembre 005 Dans ce document le transistor MOS est traité comme un composant électronique.
Filtrage stochastique non linéaire par la théorie de représentation des martingales
 Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Simulation de variables aléatoires
 Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Contexte. Pour cela, elles doivent être très compliquées, c est-à-dire elles doivent être très différentes des fonctions simples,
 Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Adaptation de maillages non structurés pour des problèmes instationnaires
 C. R. Acad. Sci. Paris, Ser. I 335 (2002) 773 778 Analyse numérique/numerical Analysis Adaptation de maillages non structurés pour des problèmes instationnaires Frédéric Alauzet a,pascalj.frey a, Bijan
C. R. Acad. Sci. Paris, Ser. I 335 (2002) 773 778 Analyse numérique/numerical Analysis Adaptation de maillages non structurés pour des problèmes instationnaires Frédéric Alauzet a,pascalj.frey a, Bijan
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Formation à la C F D Computational Fluid Dynamics. Formation à la CFD, Ph Parnaudeau
 Formation à la C F D Computational Fluid Dynamics Formation à la CFD, Ph Parnaudeau 1 Qu est-ce que la CFD? La simulation numérique d un écoulement fluide Considérer à présent comme une alternative «raisonnable»
Formation à la C F D Computational Fluid Dynamics Formation à la CFD, Ph Parnaudeau 1 Qu est-ce que la CFD? La simulation numérique d un écoulement fluide Considérer à présent comme une alternative «raisonnable»
Chapitre 7. Récurrences
 Chapitre 7 Récurrences 333 Plan 1. Introduction 2. Applications 3. Classification des récurrences 4. Résolution de récurrences 5. Résumé et comparaisons Lectures conseillées : I MCS, chapitre 20. I Rosen,
Chapitre 7 Récurrences 333 Plan 1. Introduction 2. Applications 3. Classification des récurrences 4. Résolution de récurrences 5. Résumé et comparaisons Lectures conseillées : I MCS, chapitre 20. I Rosen,
Qualité du logiciel: Méthodes de test
 Qualité du logiciel: Méthodes de test Matthieu Amiguet 2004 2005 Analyse statique de code Analyse statique de code Étudier le programme source sans exécution Généralement réalisée avant les tests d exécution
Qualité du logiciel: Méthodes de test Matthieu Amiguet 2004 2005 Analyse statique de code Analyse statique de code Étudier le programme source sans exécution Généralement réalisée avant les tests d exécution
Métriques de performance pour les algorithmes et programmes parallèles
 Métriques de performance pour les algorithmes et programmes parallèles 11 18 nov. 2002 Cette section est basée tout d abord sur la référence suivante (manuel suggéré mais non obligatoire) : R. Miller and
Métriques de performance pour les algorithmes et programmes parallèles 11 18 nov. 2002 Cette section est basée tout d abord sur la référence suivante (manuel suggéré mais non obligatoire) : R. Miller and
(51) Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)
 Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)") (19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
(19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
Surveillance et maintenance prédictive : évaluation de la latence de fautes. Zineb SIMEU-ABAZI Univ. Joseph Fourier, LAG)
") Surveillance et maintenance prédictive : évaluation de la latence de fautes Zineb SIMEU-ABAZI Univ. Joseph Fourier, LAG) SURVEILLANCE Analyser une situation et fournir des indicateurs! Détection de symptômes!
Surveillance et maintenance prédictive : évaluation de la latence de fautes Zineb SIMEU-ABAZI Univ. Joseph Fourier, LAG) SURVEILLANCE Analyser une situation et fournir des indicateurs! Détection de symptômes!
Tests non-paramétriques de non-effet et d adéquation pour des covariables fonctionnelles
 Tests non-paramétriques de non-effet et d adéquation pour des covariables fonctionnelles Valentin Patilea 1 Cesar Sanchez-sellero 2 Matthieu Saumard 3 1 CREST-ENSAI et IRMAR 2 USC Espagne 3 IRMAR-INSA
Tests non-paramétriques de non-effet et d adéquation pour des covariables fonctionnelles Valentin Patilea 1 Cesar Sanchez-sellero 2 Matthieu Saumard 3 1 CREST-ENSAI et IRMAR 2 USC Espagne 3 IRMAR-INSA
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Journée des utilisateurs de Salome-Meca et code_aster ETUDE SISMIQUE DE LA PINCE VAPEUR
 Journée des utilisateurs de Salome-Meca et code_aster 18 Mars 2014 ETUDE SISMIQUE DE LA PINCE VAPEUR 1 CIPN/GC - Groupe Séisme Sommaire Description de la pince vapeur et du contexte Présentation des diagnostics
Journée des utilisateurs de Salome-Meca et code_aster 18 Mars 2014 ETUDE SISMIQUE DE LA PINCE VAPEUR 1 CIPN/GC - Groupe Séisme Sommaire Description de la pince vapeur et du contexte Présentation des diagnostics
Communications collectives et ordonnancement en régime permanent pour plates-formes hétérogènes
 Loris MARCHAL Laboratoire de l Informatique du Parallélisme Équipe Graal Communications collectives et ordonnancement en régime permanent pour plates-formes hétérogènes Thèse réalisée sous la direction
Loris MARCHAL Laboratoire de l Informatique du Parallélisme Équipe Graal Communications collectives et ordonnancement en régime permanent pour plates-formes hétérogènes Thèse réalisée sous la direction
Master IMA - UMPC Paris 6 RDMM - Année 2009-2010 Fiche de TP
 Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Evaluation de fonctions de matrices et algorithmes pararéels
 Evaluation de fonctions de matrices et algorithmes pararéels L. Badea (Bucarest), J.-P. Chehab (Amiens), M. Petcu (Poitiers) 7 juin 2012 Table des matières 1 Motivations et effet déclencheur 2 1.1 Motivations....................................
Evaluation de fonctions de matrices et algorithmes pararéels L. Badea (Bucarest), J.-P. Chehab (Amiens), M. Petcu (Poitiers) 7 juin 2012 Table des matières 1 Motivations et effet déclencheur 2 1.1 Motivations....................................
Cours de Master Recherche
 Cours de Master Recherche Spécialité CODE : Résolution de problèmes combinatoires Christine Solnon LIRIS, UMR 5205 CNRS / Université Lyon 1 2007 Rappel du plan du cours 16 heures de cours 1 - Introduction
Cours de Master Recherche Spécialité CODE : Résolution de problèmes combinatoires Christine Solnon LIRIS, UMR 5205 CNRS / Université Lyon 1 2007 Rappel du plan du cours 16 heures de cours 1 - Introduction
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
MABioVis. Bio-informatique et la
 MABioVis Modèles et Algorithmes pour la Bio-informatique et la Visualisation Visite ENS Cachan 5 janvier 2011 MABioVis G GUY MELANÇON (PR UFR Maths Info / EPI GRAVITE) (là, maintenant) - MABioVis DAVID
MABioVis Modèles et Algorithmes pour la Bio-informatique et la Visualisation Visite ENS Cachan 5 janvier 2011 MABioVis G GUY MELANÇON (PR UFR Maths Info / EPI GRAVITE) (là, maintenant) - MABioVis DAVID
Catalogue de formation
 Enregistré sous le numéro : 11 91 012 9991 auprès du Commissaire de la République de la Région Ile de France et du Département de Paris, CADLM propose un ensemble de formation dont les programmes sont
Enregistré sous le numéro : 11 91 012 9991 auprès du Commissaire de la République de la Région Ile de France et du Département de Paris, CADLM propose un ensemble de formation dont les programmes sont
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre.
 Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Nouvelles propositions pour la résolution exacte du problème de sac à dos bi-objectif unidimensionnel en variables binaires
 Nouvelles propositions pour la résolution exacte du problème de sac à dos bi-objectif unidimensionnel en variables binaires Julien Jorge, Xavier Gandibleux Laboratoire d Informatique de Nantes Atlantique
Nouvelles propositions pour la résolution exacte du problème de sac à dos bi-objectif unidimensionnel en variables binaires Julien Jorge, Xavier Gandibleux Laboratoire d Informatique de Nantes Atlantique
ANALYSE NUMERIQUE ET OPTIMISATION. Une introduction à la modélisation mathématique et à la simulation numérique
 1 ANALYSE NUMERIQUE ET OPTIMISATION Une introduction à la modélisation mathématique et à la simulation numérique G. ALLAIRE 28 Janvier 2014 CHAPITRE I Analyse numérique: amphis 1 à 12. Optimisation: amphis
1 ANALYSE NUMERIQUE ET OPTIMISATION Une introduction à la modélisation mathématique et à la simulation numérique G. ALLAIRE 28 Janvier 2014 CHAPITRE I Analyse numérique: amphis 1 à 12. Optimisation: amphis
Annexe 6. Notions d ordonnancement.
 Annexe 6. Notions d ordonnancement. APP3 Optimisation Combinatoire: problèmes sur-contraints et ordonnancement. Mines-Nantes, option GIPAD, 2011-2012. Sophie.Demassey@mines-nantes.fr Résumé Ce document
Annexe 6. Notions d ordonnancement. APP3 Optimisation Combinatoire: problèmes sur-contraints et ordonnancement. Mines-Nantes, option GIPAD, 2011-2012. Sophie.Demassey@mines-nantes.fr Résumé Ce document
Julien MATHEVET Alexandre BOISSY GSID 4. Rapport RE09. Load Balancing et migration
 Julien MATHEVET Alexandre BOISSY GSID 4 Rapport Load Balancing et migration Printemps 2001 SOMMAIRE INTRODUCTION... 3 SYNTHESE CONCERNANT LE LOAD BALANCING ET LA MIGRATION... 4 POURQUOI FAIRE DU LOAD BALANCING?...
Julien MATHEVET Alexandre BOISSY GSID 4 Rapport Load Balancing et migration Printemps 2001 SOMMAIRE INTRODUCTION... 3 SYNTHESE CONCERNANT LE LOAD BALANCING ET LA MIGRATION... 4 POURQUOI FAIRE DU LOAD BALANCING?...
Rencontre sur la thématique du Calcul Haute Performance - 13 juin 2012. Better Match, Faster Innovation
 Better Match, Faster Innovation Rencontre sur la thématique du Calcul Haute Performance - 13 juin 2012 Meeting on the theme of High Performance Computing TABLE DES MATIÈRES Qu est ce qu un imatch? STI
Better Match, Faster Innovation Rencontre sur la thématique du Calcul Haute Performance - 13 juin 2012 Meeting on the theme of High Performance Computing TABLE DES MATIÈRES Qu est ce qu un imatch? STI
CHAPITRE I. Modélisation de processus et estimation des paramètres d un modèle
 CHAPITRE I Modélisation de processus et estimation des paramètres d un modèle I. INTRODUCTION. Dans la première partie de ce chapitre, nous rappelons les notions de processus et de modèle, ainsi que divers
CHAPITRE I Modélisation de processus et estimation des paramètres d un modèle I. INTRODUCTION. Dans la première partie de ce chapitre, nous rappelons les notions de processus et de modèle, ainsi que divers
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
La classification automatique de données quantitatives
 La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La programmation linéaire : une introduction. Qu est-ce qu un programme linéaire? Terminologie. Écriture mathématique
 La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
Version default Titre : Opérateur MECA_STATIQUE Date : 17/10/2012 Page : 1/5 Responsable : Jacques PELLET Clé : U4.51.
 Titre : Opérateur MECA_STATIQUE Date : 17/10/2012 Page : 1/5 Opérateur MECA_STATIQUE 1 But Résoudre un problème de mécanique statique linéaire. Cet opérateur permet de résoudre soit : un problème mécanique
Titre : Opérateur MECA_STATIQUE Date : 17/10/2012 Page : 1/5 Opérateur MECA_STATIQUE 1 But Résoudre un problème de mécanique statique linéaire. Cet opérateur permet de résoudre soit : un problème mécanique
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.
 PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour