- RAPPORT DE PROJET -
|
|
|
- Danièle Pelletier
- il y a 8 ans
- Total affichages :
Transcription
1 Emilie LEMAIRE Simon ZAGORSKI IUP GSI Licence 3 Année RAPPORT DE PROJET - INSTRUMENTATION D UN PEDALIER Artisan Techni Cycles Enseignant Tuteur Monsieur MIKOLAJCZYK

2 REMERCIEMENTS En premier lieu nous tenons à remercier notre tuteur de projet Monsieur MIKOLAJCZYK pour son encadrement. Nous tenons aussi à saluer l'aide apportée par Monsieur DUMAS tout particulièrement sa disponibilité tout au long de notre projet. Nous remercions également toutes les personnes qui ont pu nous apporter leur aide afin de mener à bien le projet. Enfin nous remercions Monsieur BERGHEAUD, fondateur de la société TECHNI CYCLES, sans qui ce projet n'aurait pas vu le jour. PAGE 2

3 SOMMAIRE INTRODUCTION 4 I. CAHIER DES CHARGES 5 II. GENERALITES SUR LE PEDALAGE 7 1. LE PEDALIER 7 2. QU EST-CE QU UN «BON» PEDALAGE? 7 III. RECHERCHE DE SOLUTIONS TECHNIQUES PREMIERE SOLUTION : UTILISATION DE DEUX COUPLEMETRES DEUXIEME SOLUTION : UTILISATION DE JAUGES DE CONTRAINTE SUR L ARBRE DU PEDALIER TROISIEME SOLUTION : UTILISATION DE JAUGES DE CONTRAINTE SUR LES MANIVELLES 11 IV. ETUDE THEORIQUE SCHEMA SYNOPTIQUE ETUDE DES JAUGES DE CONTRAINTES LE PONT DE WHEATSTONE ETUDE DE LA CARTE DE CONVERSION-AMPLIFICATION 18 V. ETUDE PRATIQUE ETUDE MECANIQUE ETUDE ELECTRONIQUE 27 CONCLUSION SYNTHESE DU PROJET POURSUITE ET EVOLUTION DU PROJET DIFFICULTES RENCONTREES SYNTHESE PERSONNELLE 31 BIBLIOGRAPHIE 32 ANNEXES 33 PAGE 3

4 INTRODUCTION Dans le cadre de notre troisième année de licence, nous avons été amenés à réaliser un projet. Celui-ci avait pour but de mettre en œuvre des compétences acquises durant cette année, notamment en électronique et en mécanique. Le projet que nous avons choisi nous met en lien direct avec le monde industriel puisqu'il est destiné à être utilisé par un artisan. TECHNI CYCLES est une entreprise située en France, au cœur de l'auvergne dans la banlieue de Clermont-Ferrand. Elle a été créée le 30 avril 1994 par William BERGHEAUD, qui compte aujourd'hui 2 salariés. Elle a pour principales activités la fabrication, la réparation et le commerce de cycles. Elle a aussi une activité spécifique de fabrication sur mesure pour les cadres de cycles. Monsieur BERGHEAUD a reçu le "Prix du Travail Manuel" du District 1740 du Rotary International en 1996 pour la réalisation d'un tricycle pour handicapé. Le projet qu'il nous propose est une étude complète autour d'un vélo ergonomique, dans lequel il y a trois domaines d'action : la conception mécanique, l'automatisation du châssis et la conception de pédales intelligentes. C'est sur ce dernier domaine que nous nous sommes penchés. PAGE 4

5 I. CAHIER DES CHARGES Figure 1 Afin de pouvoir fournir des cadres de vélos sur mesure, la société TECHNI CYCLES dispose d'un châssis de vélo réglable. Il s'agit d'un châssis tubulaire composé d'éléments qui coulissent les uns dans les autres. Cependant, ce châssis possède un inconvénient : afin de modifier un réglage, il faut que le cycliste descende du vélo. Lorsque le sportif remonte dessus, une fois les réglages faits, il ne retrouve pas forcément les mêmes sensations. Le premier objectif de ce projet est de réaliser pour cette société un châssis dont les réglages vont s'effectuer sans que le sportif n'ait à descendre du vélo. Ces réglages devront se faire via un ordinateur. Nous nous sommes penchés sur le deuxième objectif de ce projet. En plus de servir de patron pour réaliser un cadre de vélo sur mesure, ce châssis réglable sera également utilisé pour faire des études d'ergonomie ce qui introduit notre objectif. En effet durant une séance d'essai, le sportif est filmé par plusieurs caméras afin de scruter sa position durant l'effort. Il est vrai qu'une mauvaise position peut être source de troubles physiques comme des tendinites. Beaucoup de personnes ont également un côté dominant : cela se traduit par une meilleure musculature, c'est à dire qu'un côté est plus sollicité que l'autre. PAGE 5

6 Le châssis réglable devra donc être équipé de pédales intelligentes : elles devront être capables de mesurer l'effort qui est appliqué sur chacune d'elles, et de transmettre les données à un ordinateur. Notre travail peut se décomposer en trois étapes principales : le choix de la technologie de mesure, l'intégration du mécanisme en accord avec le pédalier et le reste du châssis, la création du logiciel pour récupérer les données via un port série en accord avec le logiciel de pilotage du châssis. PAGE 6


7 II. GENERALITES SUR LE PEDALAGE Dans un souci de compréhension, il nous a semblé nécessaire de faire un bref rappel des généralités du pédalier, et plus généralement, du pédalage. 1. LE PEDALIER Bien qu'un pédalier soit un élément commun que n'importe qui connaisse, il est en réalité plus compliqué qu'il n'y paraît. Nous avons jugé utile de revenir sur cet organe indispensable du vélo. Voici une maquette numérique représentant un pédalier simplifié. Pédales Arbre du pédalier Manivelles Cadre du vélo Figure 2 : Pédalier 2. QU EST-CE QU UN «BON» PEDALAGE? Hormis la condition physique du cycliste, le pédalage est un outil essentiel à de bonnes performances. L'objectif de notre projet était de donner à l'artisan les outils suffisant pour corriger, PAGE 7

8 entre autres, d'éventuelles faiblesses de pédalage. Il existe un cycle «exemplaire» de bon pédalage. Nous allons vous le présenter rapidement. Figure 3 : Cycle du pédalage Mouvement correct de pédalage : Le pied appuie sur la pédale dans les positions 1, 2, 3 et 4 tandis que l'autre pied (solidaire de la pédale par le cale-pied) la tire (position 5, 6 et 7). L'effort des deux jambes doit donc être constamment réparti sur les deux pédales. Le talon doit toujours rester un peu plus haut que la pointe du pied. Quand un des pieds est en position basse, il faut le ramener en arrière avec le talon orienté vers le haut. Dans le même temps, il faut pousser l'autre pied en avant. L'ensemble du mouvement doit être continu, arrondi sur 360 degrés, sans à-coups, chaque pied aidant l'autre à jouer son rôle. L'effort ainsi communiqué par le pied sur la pédale sera, autant que possible, toujours perpendiculaire à la manivelle. Si la force n est pas dirigée perpendiculairement à la manivelle, il se PAGE 8

9 crée une composante de cette force qui est dirigée vers l extérieur. Cette composante qui agirait en traction/compression (F T/C ), n apporterait rien à la performance du cycliste. F F F efficace F T/C F T/C F F F efficace C est pourquoi nous avons choisi de simuler ce système par une poutre en flexion. PAGE 9

10 III. RECHERCHE DE SOLUTIONS TECHNIQUES Pour déterminer quelle jambe appuie plus que l autre, et ainsi attester de la qualité du pédalage, on instrumentera notre pédalier de manière à mesurer les efforts appliqués sur les pédales et ainsi à en déduire le couple transmis à l arbre. On se propose d aborder notre projet en essayant de mesurer simplement par différentes manières le couple sur le pédalier afin de déterminer quel pied exerce la pression. Pour cela nous avons approché différentes solutions. 1. PREMIERE SOLUTION : UTILISATION DE DEUX COUPLEMETRES couplemètres. Souhaitant mesurer un couple, nous nous sommes naturellement dirigés vers les Cette solution a très rapidement été abandonnée faute de place. Par rapport à l'espace disponible, un couplemètre était trop conséquent. Bien que la conception du pédalier nous incombe, des contraintes dimensionnelles liées au pédalage nous limitent dans l'encombrement. Le cycliste doit pouvoir pédaler de manière naturelle. Nous avions toutefois pensé déporter un des deux couplemètres à l arrière sur l axe de la roue. A cause du rapport de transmission, retrouver le couple sur chacune des pédales aurait été trop approximatif. Néanmoins, le choix d utiliser des couplemètres présentait un avantage : celui de pouvoir exploiter facilement les données par l intermédiaire d une carte d acquisition (National Instrument par exemple). En effet le couplemètre est un «capteur intelligent» puisqu il renferme l électronique suffisante permettant de traiter facilement le signal. Sous l impulsion de Monsieur Dumas, nous avons pu nous rendre à un séminaire d HBM, fabricant de capteurs. Lors de cette journée nous avons rencontré des spécialistes des capteurs. Grâce à leur expérience, nous nous sommes orientés vers une nouvelle solution. PAGE 10

11 2. DEUXIEME SOLUTION : UTILISATION DE JAUGES DE CONTRAINTE SUR L ARBRE DU PEDALIER Après discussion avec Monsieur CATHALA (commercial HBM), la solution la plus judicieuse était d instrumenter l arbre du pédalier avec des jauges de contrainte. Dans un premier temps, cette solution nous satisfaisait. La jauge se collant en surface de la pièce à observer, d un point de vue encombrement, cela ne pose pas de problème particulier. Néanmoins, cette solution engendrait d autres problèmes concernant la conception de l arbre. En effet, la réalisation d un tel système nécessitait un savoir-faire qui nous aurait conduit à déléguer sa conception. L observation des déformations est induite par la géométrie spécifique de l arbre ; géométrie dont on ne maîtrisait pas la mise en œuvre. L autre inconvénient de ce système était d être certain de pouvoir observer deux couples distincts propres à chaque pédale et non un couple global. Ces inconvénients nous ont conduit à élaborer un système capable à coup sûr de mesurer le couple issu de chaque pédale. Ainsi nous avons décidé d instrumenter les manivelles du pédalier. 3. TROISIEME SOLUTION : UTILISATION DE JAUGES DE CONTRAINTE SUR LES MANIVELLES L idée est d instrumenter les manivelles de jauges de contraintes afin d observer la déformation en flexion sur chacune d elles. On en déduit une contrainte au niveau de la jauge d extensomètrie. Grâce à l étalonnage de celle-ci, on retrouve la contrainte maximale, et par le calcul, l effort appliqué sur la pédale. Et ainsi, on peut estimer le couple sur l arbre. Nous avons donc finalement décidé d utiliser cette méthode pour mesurer le couple. Elle nous a semblé être la plus efficace et la mieux adaptée à nos besoins. PAGE 11

12 IV. ETUDE THEORIQUE Il est important d'avoir une idée précise des performances recherchées. Pour cela, nous allons présenter de façon schématique notre système de mesure. Ensuite, afin de mieux comprendre en quoi les jauges de contrainte sont efficaces dans le cas présent, une étude théorique de leur fonctionnement et de leur mise en œuvre sera nécessaire. 1. SCHEMA SYNOPTIQUE Afin de mieux comprendre la complexité de notre système, voici un schéma synoptique. Manivelle gauche Manivelle droite Jauge Jauge Jauge Jauge Manivelles Carte Conversion- Amplification Carte Conversion- Amplification PIC Pédalier Emetteur Radio Codeur (Roue codeuse) Récepteur Radio Codeur (Electronique) PIC Cadre Ordinateur Ordinateur PAGE 12

13 Faute de temps nous n avons pas pu étudier la totalité du système. L'étude concernant l'utilisation de PIC, tout comme celle de la télémétrie radio, est faite par d'autres étudiants. Nous nous sommes donc concentrés principalement sur l'étude des jauges de contrainte. - Jauges de contrainte et carte de Conversion-Amplification Ce sous ensemble correspond à la mise en œuvre des jauges de contrainte, de la conversion du signal retourné ainsi que leur amplification. Nous présenterons en détails cette partie. - PIC Nous utiliserons un PIC pour répondre à deux besoins : convertir, pour chaque manivelle, un signal entrant analogique et n en sortir qu un seul signal numérique. Il y a plusieurs avantages à avoir choisi un PIC dans le cadre de notre application : sa capacité de démultiplexage, son faible encombrement et son coût. - Télémétrie Radio Jusqu'ici, toute l'instrumentation et l'émetteur radio sont embarqués dans le pédalier. Cependant, pour pouvoir analyser le signal sur l'ordinateur, il nous fallait le transmettre sans fil. Nous avions d'abord pensé à un connecteur à balais magnétique. Cependant, cette méthode avait un mauvais rapport rendement-prix. Nous avons donc choisi d après les conseils de Monsieur MIKOLAJCZYK d'utiliser comme solution, la télémétrie radio. De plus, cette année, un étudiant était chargé de mettre en œuvre un système similaire. La télémétrie radio offre l'avantage d'être peu couteuse et assure un meilleur rendement. - Codeur La technologie utilisée pour la mesure grâce à un codeur est maitrisée à l'iup. Nous n'avons pas estimé urgent de se pencher sur cette étude. Cependant, par souci de coût lors de nos recherche, nous avons prévu de réaliser l'électronique à l'iup, et d'acheter une roue codeuse incrémentale que certaines sociétés comme USDIGITAL propose à prix modique. Concernant maintenant le choix de la technologie (incrémentale ou absolue) nous avons jugé suffisant de choisir un codeur incrémental à deux voies. En effet, le codeur absolu présente l'avantage de connaître en permanence sa position angulaire, même après coupure de courant. Cependant, dans notre cas ceci n'est pas indispensable car nous n'avons pas besoin de connaître instantanément la position de la manivelle. Une des deux pistes ne comportera qu'une impulsion qui donnera le top du départ de la mesure. PAGE 13

14 2. ETUDE DES JAUGES DE CONTRAINTES Notre idée était donc de mesurer la déformation en flexion des manivelles du pédalier. Les jauges de contrainte répondaient parfaitement à ce que nous souhaitions obtenir. Une jauge de contrainte est un capteur passif. Dans notre cas nous utiliserons une jauge résistive. D'un point de vue pratique, la jauge est collée sur un corps d'épreuve qui subira la déformation (la manivelle). Figure 4 : Barre équipée de jauges sur chaque face Le corps d'épreuve doit être suffisamment flexible pour pouvoir ainsi transmettre la déformation à la résistance électrique (la jauge solidaire du corps d'épreuve) ce qui induit des variations de résistance mises en évidence par un montage en pont de Wheatstone. Ce qui est présenté sur le schéma ci-dessous. Contrainte Corps d'épreuve Déformation Capteur Signal = = électrique Jauges de Manivelle contrainte Plus précisément, la jauge étant solidaire du corps d'épreuve, ils subissent la même déformation. Cette déformation modifie certaines caractéristiques physiques du matériau, notamment sa section et sa longueur. Ceci induit une variation de résistance car : PAGE 14

15 =. R = Résistance (Ω) ρ = Résistivité (Ω.mm) l = Longueur (mm) S = Section (mm²) On peut alors montrer que : On suppose que la section du fil résistant qui constitue la jauge est circulaire et de faible diamètre d. La déformation longitudinale du fil entraîne une variation des dimensions transversales :. ν = Coefficient de Poisson ( 0,3 pour un matériau supposé isotrope) Puisque. alors : 2 Aux variations de volume sont associées des variations de résistivité :. C = constante de Bridgman ( 1 pour les métaux) Sachant que., on aura : PAGE 15
 Puisque.")
16 2 D où : Ce qui donne finalement : K= facteur de jauge est de l'ordre de 2 car C est de l'ordre de 1. Une jauge est caractérisée par sa résistance nominale (R) et un facteur de jauge (K). Il existe plusieurs technologies de jauges de contrainte. Parmi elles, les plus utilisées sont les jauges de contrainte à trame pelliculaire. Un inconvénient existe tout de même : leur sensibilité aux grandeurs d'influence telles que la température. Nous allons voir comment, à partir d'un montage en pont de Wheatstone, nous pouvons inhiber cette grandeur parasite. 3. LE PONT DE WHEATSTONE L'emploi d'un montage en pont de Wheatstone présente l'avantage de s'affranchir de la tension continue présente en l'absence de variations du mesurande comme, par exemple, lors de l'utilisation d'un montage potentiométrique. PAGE 16

17 Figure 5 : Montage potentiométrique On rappelle que R représente la résistance variable (jauge de contrainte). D'après ce montage :. Au repos cette résistance est à sa valeur nominale R. On aura donc en permanence une tension de sortie U S même sans déformation du corps d'épreuve. Ceci est donc un problème dans notre cas. L'utilisation d'un pont de Wheatstone sera plus adéquate. Figure 6 : Pont de Wheatstone PAGE 17

18 Les résistances R3 et R4 représentent nos jauges de contrainte. Calcul des potentiels : En D : D. IN En C : C. IN On obtient une tension de mesure encore appelée tension de déséquilibre du pont : out D C out in... Au repos, les valeurs nominales des 4 résistances sont égales On voit dans l'expression de V out que le numérateur s'annule. Ainsi, la tension de sortie V out devient nulle. Donc, en l'absence d'évolution de mesurande, on a une tension V out nulle, d'après la condition d'équilibre d'un pont de Wheatstone : ETUDE DE LA CARTE DE CONVERSION-AMPLIFICATION Le pont de Wheatstone dont nous venons de parler, est intégré à cette carte. En sortie du pont de Wheatstone nous obtenons une variation de tension proportionnelle à la variation de PAGE 18

19 résistances (due à la déformation). Afin d'être exploitable, cette variation de tension doit être amplifiée. C'est le rôle de cette carte. Voici une photo du montage complet, à savoir : Le corps d épreuve et les jauges collées, la carte électronique et l'oscilloscope : Figure 7 : Montage permettant les mesures Présentation des différents étages de la carte : PAGE 19

20 Figure 8 : Carte électronique PAGE 20
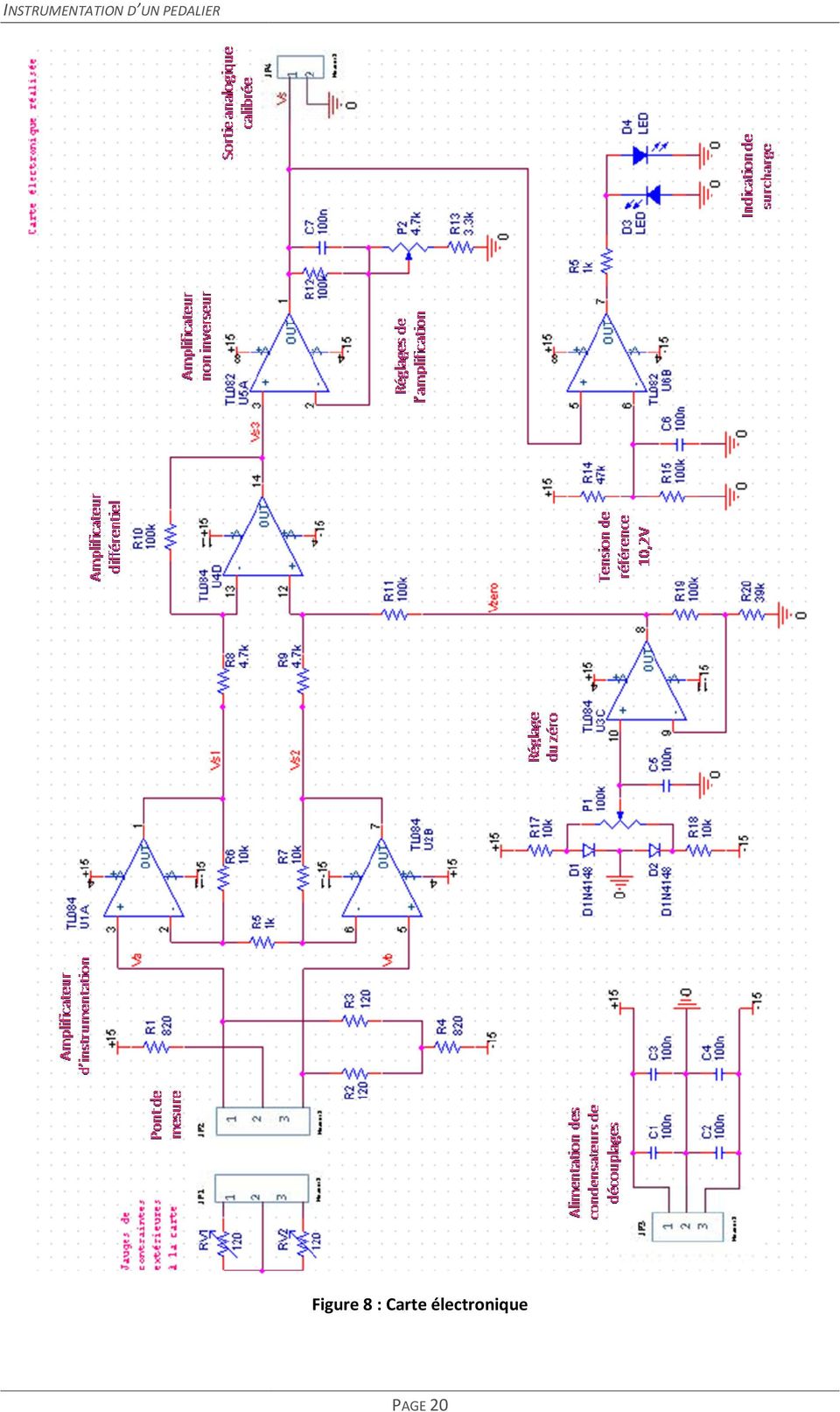
21 INSTRUMENTATION D UN PEDALIER 1er étage : Pont de Wheatstone Figure 9 : Extrait de la carte 2ème étage : Amplificateur d'instrumentation Figure 10 : Extrait de la carte Un amplificateur d instrumentation est un dispositif électronique destiné au traitement de faibles signaux électriques PAGE 21
22 INSTRUMENTATION D UN PEDALIER 3ème étage : couleur 3 : Réglage du zéro Figure 11 : Extrait de la carte Le réglage du zéro se fait à partir d'un amplificateur non inverseur dont le gain est réglable à l aide d une résistance variable iable de 100kΩ. 100kΩ. Il permet d annuler la tension de sortie de la carte est ainsi de pouvoir réaliser les mesures dans de bonnes conditions. 4ème étage : couleur 4 : Réglages de l'amplification Figure 12 : Extrait de la carte L intérêt de cet étage est d amplifier le signal de sortie une dernière fois avant la lecture sur l oscilloscope. PAGE 22
23 5ème étage : couleur 5 : Indication de surcharge Figure 13 : Extrait de la carte Cet étage est constitué d un amplificateur opérationnel fonctionnant en comparateur. L objectif de ce montage est d indiquer à l opérateur si la carte est en surcharge. L observation se fait par le biais de deux Diodes Electroluminescentes (une rouge et une verte) qui étaient mal câblées (les deux s allumaient car montées dans le même sens). Problème que nous avons corrigé. La carte s alimente en continu +15/-15V. Le réglage du signal sur l oscilloscope se fait à l aide des deux potentiomètres, au repos c est à dire lorsque le corps d épreuve ne subit aucune déformation. PAGE 23
24 V. ETUDE PRATIQUE Nous allons vous présenter dans cette partie les expériences que nous avons pu être amenés à réaliser et les enseignements que nous en avons tirés, tout d abord d un point de vue mécanique et ensuite d un point de vue électronique. 1. ETUDE MECANIQUE Nous avons décomposé notre étude mécanique en deux parties distinctes. Dans un premier temps nous avons souhaité modéliser un système simple, afin de bien comprendre le processus de mesure, de le prendre en main et d observer les résultats obtenus sur l oscilloscope. Une fois le système maîtrisé nous avons pu appliquer ce raisonnement à la modélisation de notre cas d étude, à savoir la manivelle soumise à une force ponctuelle en son extrémité. Figure 14 : Banc de mesures Nous avons choisi de modéliser une poutre reposant sur deux appuis ponctuels distants de 200 mm. La poutre choisie était en aluminium de 15mm de large (b) par 3mm d épaisseur (h). On calcule pour une charge placée au milieu de la poutre en l / 2 = 10mm. PAGE 24
25 Figure 15 : RDM6 Poutre sur deux appuis Nous avons d abord, par le calcul, cherché les ordres de grandeurs des paramètres physiques mis en jeu que nous allons expliciter maintenant. Tout d abord il faut calculer le moment quadratique (selon l axe Z) qui est une constante liée au matériau et aux conditions expérimentales. y b = 15mm h = 3mm z , Dans notre montage on sait que le moment fléchissant maximum est en l/2 et de la forme :. 4 PAGE 25
26 12, ,625. On peut ainsi remonter à la contrainte σ :. 2 1,5.10 0, , , ² Soit : 27,78 Nous avons souhaité vérifier nos calculs à l aide du logiciel RDM 6 Le Mans. Figure 16 : RDM6 Calcul de la contrainte normale logiciel. On peut constater sur cette illustration que nos calculs coïncident avec les résultats du PAGE 26
27 Une fois les valeurs de contraintes connues nous avons mis en place l étude expérimentale. Nous allons donc maintenant l expliciter ainsi que les résultats obtenus au travers de l étude électronique. 2. ETUDE ELECTRONIQUE Nous avons déterminé une contrainte théorique de 27,78Mpa, que nous allons tenter de retrouver par l expérimentation. Pour cela il nous faut expliciter le travail réalisé sur la carte électronique. Tout d abord, il nous a fallu retrouver le gain de la carte que l on avait régler à tâtons lors de la mise à zéro de la tension de sortie. Pour ce faire nous avons directement mesuré les tensions aux bornes des amplificateurs opérationnels. Nous avons ainsi trouvé un gain de 412,121. Figure 17 : Carte de Conversion-Amplification PAGE 27
28 D après le mode opératoire décrit dans la partie précédente, nous avons pu mesurer une variation de tension de l ordre de 4,5V (tension de sortie de la carte). Nous étions équipés pour cela d une poutre en aluminium munie de deux jauges collées à 1,5mm du milieu de la poutre. Connaissant le gain G, on retrouve la tension d entrée de la carte V e qui est égale à la tension de sortie du pont de Wheatstone V out par la relation suivante : 4,5 10,92 412,121 On sait que d après la théorie du pont de Wheatstone : 2. On en déduit donc la variation de résistance dr : , , On a déjà vu que : Mais on peut montrer que :. PAGE 28
29 On en déduit que :.. 87, ,478 On sait que l évolution de la contrainte est supposée linéaire donc par un produit en croix on peut retrouver la contrainte maximale sous le chargement en l/2. À l appui on sait que la contrainte est nulle et on vient de voir qu à 8,5mm de l appui la contrainte est de 24,478MPa. Ainsi on trouve le coefficient directeur de la droite (aσ) représentant la contrainte et on en déduit la contrainte maximum en l/2 = 10mm : 24, ,719 Donc : 10. 2,719 27,19 2 Soit une différence négligeable par rapport au résultat théorique qui peut être due au module d Young que l on ne connaît pas avec certitude. PAGE 29
30 CONCLUSION 1. SYNTHESE DU PROJET Au terme de ces trois mois de projet, nous sommes conscients que nos objectifs ambitieux n ont pas pu tous être satisfaits. Nous avons choisi d orienter notre travail hiérarchiquement en fonction de l importance des tâches. Notre projet étant un cas très complet et typique de la mécatronique, nous avons décidé d en aborder les aspects mécanique et électronique. Toutefois, un aspect informatique était prévu concernant l interface logicielle permettant l affichage concret des résultats et leur traitement. Au fil des séances, et de par la division du travail entre les trois binômes, il a été convenu que la meilleure solution était d intégrer notre application logicielle à celle développée par les étudiants chargés de l interface commandant les réglages du châssis. Nous avons voulu étudier le moyen de mesurer le couple au niveau du pédalier. Après avoir réfléchi à plusieurs solutions, nous avons été capables d élaborer un système qui répondait à ce besoin. Notre étude s est donc longuement penchée sur la mise en œuvre d un tel système. Nous aurions aimé réaliser une maquette précise le mettant en action, cependant le temps nous a manqué. Nous avons toutefois pu mettre en évidence le fonctionnement de toute la partie déformations et mesures de contraintes. Cet objectif, selon nous, est une réelle avancée pour le projet. En effet, nos successeurs pourront ainsi se reposer sur notre travail afin de mettre en œuvre, le plus rapidement possible, le système dans son état définitif. 2. POURSUITE ET EVOLUTION DU PROJET Notre principale préoccupation tout au long de ce projet a été de limiter l encombrement. En effet, il nous fallait pouvoir embarquer toute l électronique dans le pédalier. Cependant, celui-ci étant réduit et rotatif, nous avons imaginé un arbre creux pour faire passer les fils. Nous avons aussi pensé à élargir le diamètre de cet arbre entre chaque roulement, afin de pouvoir y loger l électronique. De plus, cette électronique pourra être réalisée grâce à la technologie CMS (Composants Montés en Surface) qui, comme son nom l indique permet de monter des composants en surface, et sur chaque face de la plaque support. Autre avantage, les composants CMS sont bien plus petits que les composants traversants. PAGE 30
31 Comme nous l avons déjà dit dans le rapport, les codeurs ne sont pas des plus difficiles à mettre en œuvre. Pour mieux comprendre ce type de capteur, il existe en salle 215 un TP que nous avions souhaité réaliser sur les conseils de Madame VARENNE. Toutefois, étant pressés par le temps, on nous l a déconseillé. En termes d évolution, il serait possible d étudier les pédales afin de les instrumenter et ainsi de pouvoir mesurer d autres caractéristiques propres aux techniques de pédalage de chacun. 3. DIFFICULTES RENCONTREES Une fois notre décision prise quant à la technologie utilisée, la principale difficulté rencontrée a été le manque de précision sur la carte électronique réalisée. Le schéma électrique de cette carte, trouvé sur Internet par nos prédécesseurs, était erroné. Nous avons donc perdu du temps à le comprendre, car le câblage des AOP était différent, de la carte au schéma. Néanmoins cela nous a conduit à refaire un schéma de la carte, et ainsi à nous rendre compte qu un des potentiomètres était hors d usage. Après commande et soudage d un nouveau potentiomètre, le signal de sortie était de bien meilleure qualité. De plus, nous en avons profité pour corriger le soudage des LED. En effet, d après le schéma électrique, elles devaient être montées en sens opposé, ce qui n était pas le cas. En cas de surtension, les deux LED (rouge et verte) s allumaient. Désormais, la verte reste allumée quand la carte est sous tension. En cas de surtension, la LED rouge s allume. 4. SYNTHESE PERSONNELLE Bien que le travail réalisé puisse paraître minime, il nous a toutefois apporté la possibilité de mettre en œuvre nos compétences et d en acquérir de nouvelles dans divers domaines. Ayant chacun une formation différente, l un en mécanique, et l autre en électronique et informatique industrielle, nous formions un binôme complémentaire. Nous avons ainsi pu nous apporter mutuellement des savoirs et des savoir-faire. PAGE 31
32 BIBLIOGRAPHIE SITES INTERNET : Importante bases de données sur de nombreux sujets techniques HBM, fabricant de capteur Cours sur le pont de Wheatstone Documentation technique de l amplificateur d instrumentation CMS. Documentation technique de la roue codeuse US DIGITAL Site général sur le pédalage SUPPORTS PAPIER : «Mesure des caractéristiques des matériaux» Rapport de Projet L3 IUP GSI ( ) Florient AUBERT et Arnaud BRUN «Mesure des caractéristiques des métaux» Rapport de projet M1 Mécatronique ( ) Willy CHANTELAUZE et Sébastien FONLUPT Cours de Capteurs Licence 3 - IUP GSI Christelle VARENNE «Guide du calcul en mécanique Editions HACHETTE TECHNIQUE D. Spenlé et R Gournant» PAGE 32
Projet de synthèse de l'électronique analogique : réalisation d'une balance à jauges de contrainte
 J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
- MANIP 2 - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE
 - MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
- MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
! analyse du fonctionnement
 Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Observer TP Ondes CELERITE DES ONDES SONORES
 OBJECTIFS CELERITE DES ONDES SONORES Mesurer la célérité des ondes sonores dans l'air, à température ambiante. Utilisation d un oscilloscope en mode numérique Exploitation de l acquisition par régressif.
OBJECTIFS CELERITE DES ONDES SONORES Mesurer la célérité des ondes sonores dans l'air, à température ambiante. Utilisation d un oscilloscope en mode numérique Exploitation de l acquisition par régressif.
Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN
 Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN Table des matières. Introduction....3 Mesures et incertitudes en sciences physiques
Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN Table des matières. Introduction....3 Mesures et incertitudes en sciences physiques
SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION)
") Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
Les puissances 4. 4.1. La notion de puissance. 4.1.1. La puissance c est l énergie pendant une seconde CHAPITRE
 4. LES PUISSANCES LA NOTION DE PUISSANCE 88 CHAPITRE 4 Rien ne se perd, rien ne se crée. Mais alors que consomme un appareil électrique si ce n est les électrons? La puissance pardi. Objectifs de ce chapitre
4. LES PUISSANCES LA NOTION DE PUISSANCE 88 CHAPITRE 4 Rien ne se perd, rien ne se crée. Mais alors que consomme un appareil électrique si ce n est les électrons? La puissance pardi. Objectifs de ce chapitre
DÉVERSEMENT ÉLASTIQUE D UNE POUTRE À SECTION BI-SYMÉTRIQUE SOUMISE À DES MOMENTS D EXTRÉMITÉ ET UNE CHARGE RÉPARTIE OU CONCENTRÉE
 Revue Construction étallique Référence DÉVERSEENT ÉLASTIQUE D UNE POUTRE À SECTION BI-SYÉTRIQUE SOUISE À DES OENTS D EXTRÉITÉ ET UNE CHARGE RÉPARTIE OU CONCENTRÉE par Y. GALÉA 1 1. INTRODUCTION Que ce
Revue Construction étallique Référence DÉVERSEENT ÉLASTIQUE D UNE POUTRE À SECTION BI-SYÉTRIQUE SOUISE À DES OENTS D EXTRÉITÉ ET UNE CHARGE RÉPARTIE OU CONCENTRÉE par Y. GALÉA 1 1. INTRODUCTION Que ce
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
Afficheurs 7 segments à LEDs Géant
 Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Afficheurs 7 segments à LEDs Géant Michaël JOLLAIN Thomas
Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Afficheurs 7 segments à LEDs Géant Michaël JOLLAIN Thomas
CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT
 TP CIRCUITS ELECTRIQUES R.DUPERRAY Lycée F.BUISSON PTSI CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT OBJECTIFS Savoir utiliser le multimètre pour mesurer des grandeurs électriques Obtenir expérimentalement
TP CIRCUITS ELECTRIQUES R.DUPERRAY Lycée F.BUISSON PTSI CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT OBJECTIFS Savoir utiliser le multimètre pour mesurer des grandeurs électriques Obtenir expérimentalement
Gestion et entretien des Installations Electriques BT
 Durée : 5 jours Gestion et entretien des Installations Electriques BT Réf : (TECH.01) ² Connaître les paramètres d une installation basse tension, apprendre les bonnes méthodes de gestion et entretien
Durée : 5 jours Gestion et entretien des Installations Electriques BT Réf : (TECH.01) ² Connaître les paramètres d une installation basse tension, apprendre les bonnes méthodes de gestion et entretien
Guide de paramétrage des contrôleurs Goldenmotor
 Cycloboost 7 rue de Mireport 33310 LORMONT Guide de paramétrage des contrôleurs Goldenmotor Version 5 ~ 12/06/2014 Web Support www.cycloboost.com Ouvrir un ticket Table des matières 1 Avant de commencer...2
Cycloboost 7 rue de Mireport 33310 LORMONT Guide de paramétrage des contrôleurs Goldenmotor Version 5 ~ 12/06/2014 Web Support www.cycloboost.com Ouvrir un ticket Table des matières 1 Avant de commencer...2
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
UNITÉS ET MESURES UNITÉS DE MESURE DES LONGUEURS. Dossier n 1 Juin 2005
 UNITÉS ET MESURES UNITÉS DE MESURE DES LONGUEURS Dossier n 1 Juin 2005 Tous droits réservés au réseau AGRIMÉDIA Conçu et réalisé par : Marie-Christine LIEFOOGHE Bruno VANBAELINGHEM Annie VANDERSTRAELE
UNITÉS ET MESURES UNITÉS DE MESURE DES LONGUEURS Dossier n 1 Juin 2005 Tous droits réservés au réseau AGRIMÉDIA Conçu et réalisé par : Marie-Christine LIEFOOGHE Bruno VANBAELINGHEM Annie VANDERSTRAELE
Baccalauréat Professionnel Électrotechnique, Énergie, Équipements Communicants
 Baccalauréat Professionnel Électrotechnique, Énergie, Équipements Communicants Fiche de travaux liés à des activités d : Étude et réalisation. Titre : Alarme intrusion CONRAD filaire Lieu d activité :
Baccalauréat Professionnel Électrotechnique, Énergie, Équipements Communicants Fiche de travaux liés à des activités d : Étude et réalisation. Titre : Alarme intrusion CONRAD filaire Lieu d activité :
PASSAGE A NIVEAU HO/N
 PASSAGE A NIVEAU HO/N Description Ce passage à niveau en laiton est composé de deux demi-barrières, ainsi que de deux feux lumineux rouges. Vous pouvez utiliser ce PN sur un nombre quelconque de voie y
PASSAGE A NIVEAU HO/N Description Ce passage à niveau en laiton est composé de deux demi-barrières, ainsi que de deux feux lumineux rouges. Vous pouvez utiliser ce PN sur un nombre quelconque de voie y
LA MAIN A LA PATE L électricité Cycle 3 L électricité.
 LA MAIN A LA PATE L électricité Cycle 3 v L électricité. L électricité cycle 3 - doc Ecole des Mines de Nantes 1 LA MAIN A LA PATE L électricité Cycle 3 v L'électricité. PROGRESSION GENERALE Séance n 1
LA MAIN A LA PATE L électricité Cycle 3 v L électricité. L électricité cycle 3 - doc Ecole des Mines de Nantes 1 LA MAIN A LA PATE L électricité Cycle 3 v L'électricité. PROGRESSION GENERALE Séance n 1
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
SSNL126 - Flambement élastoplastique d'une poutre droite. Deux modélisations permettent de tester le critère de flambement en élastoplasticité :
 Titre : SSNL16 - Flambement élastoplastique d'une poutre [...] Date : 15/1/011 Page : 1/6 Responsable : Nicolas GREFFET Clé : V6.0.16 Révision : 8101 SSNL16 - Flambement élastoplastique d'une poutre droite
Titre : SSNL16 - Flambement élastoplastique d'une poutre [...] Date : 15/1/011 Page : 1/6 Responsable : Nicolas GREFFET Clé : V6.0.16 Révision : 8101 SSNL16 - Flambement élastoplastique d'une poutre droite
Chapitre 18 : Transmettre et stocker de l information
 Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Dossier technique. Présentation du bus DMX et Utilisation des options EL13 / EL14 ERM AUTOMATISMES INDUSTRIELS 1 LE PROTOCOLE DMX 2
 ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : Contact@erm-automatismes.com 1
ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : Contact@erm-automatismes.com 1
PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS
 PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS Matériel : Un GBF Un haut-parleur Un microphone avec adaptateur fiche banane Une DEL Une résistance
PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS Matériel : Un GBF Un haut-parleur Un microphone avec adaptateur fiche banane Une DEL Une résistance
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Mesure de la pression différentielle et différentielle bidirectionnelle expliquée à l'aide du capteur
 Dans la technique de mesure de pression, on distingue les méthodes de mesure en fonction des tâches à réaliser. Au rang de ces méthodes figurent la mesure de la pression absolue, la mesure de la pression
Dans la technique de mesure de pression, on distingue les méthodes de mesure en fonction des tâches à réaliser. Au rang de ces méthodes figurent la mesure de la pression absolue, la mesure de la pression
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
CORRECTION TP Multimètres - Mesures de résistances - I. Mesure directe de résistors avec ohmmètre - comparaison de deux instruments de mesure
 Introduction CORRECTION TP Multimètres - Mesures de résistances - La mesure d une résistance s effectue à l aide d un multimètre. Utilisé en mode ohmmètre, il permet une mesure directe de résistances hors
Introduction CORRECTION TP Multimètres - Mesures de résistances - La mesure d une résistance s effectue à l aide d un multimètre. Utilisé en mode ohmmètre, il permet une mesure directe de résistances hors
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Eléments constitutifs et synthèse des convertisseurs statiques. Convertisseur statique CVS. K à séquences convenables. Source d'entrée S1
 1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
Le multiplexage. Sommaire
 Sommaire Table des matières 1- GENERALITES... 2 1-1 Introduction... 2 1-2 Multiplexage... 4 1-3 Transmission numérique... 5 2- LA NUMERATION HEXADECIMALE Base 16... 8 3- ARCHITECTURE ET PROTOCOLE DES RESEAUX...
Sommaire Table des matières 1- GENERALITES... 2 1-1 Introduction... 2 1-2 Multiplexage... 4 1-3 Transmission numérique... 5 2- LA NUMERATION HEXADECIMALE Base 16... 8 3- ARCHITECTURE ET PROTOCOLE DES RESEAUX...
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
Electron S.R.L. - MERLINO - MILAN ITALIE Tel (++ 39 02) 90659200 Fax 90659180 Web www.electron.it, e-mail electron@electron.it
 90659200 Fax 90659180 Web www.electron.it, e-mail electron@electron.it") Electron S.R.L. Design Production & Trading of Educational Equipment B3510--II APPLIICATIIONS DE TRANSDUCTEURS A ULTRASONS MANUEL D IINSTRUCTIIONS POUR L ETUDIIANT Electron S.R.L. - MERLINO - MILAN ITALIE
Electron S.R.L. Design Production & Trading of Educational Equipment B3510--II APPLIICATIIONS DE TRANSDUCTEURS A ULTRASONS MANUEL D IINSTRUCTIIONS POUR L ETUDIIANT Electron S.R.L. - MERLINO - MILAN ITALIE
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Classe : 1 ère STL Enseignement : Mesure et Instrumentation. d une mesure. Titre : mesure de concentration par spectrophotométrie
 Classe : 1 ère STL Enseignement : Mesure et Instrumentation THEME du programme : mesures et incertitudes de mesures Sous-thème : métrologie, incertitudes Extrait du BOEN NOTIONS ET CONTENUS Mesures et
Classe : 1 ère STL Enseignement : Mesure et Instrumentation THEME du programme : mesures et incertitudes de mesures Sous-thème : métrologie, incertitudes Extrait du BOEN NOTIONS ET CONTENUS Mesures et
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Mesure de Salinité Réalisation d'un conductimètre
 Kourou Novembre 2010. MANGOTECHNO Mesure de Salinité Réalisation d'un conductimètre Frédéric BOUCHAR (TENUM Toulouse) Version 1.0 Table des matières 1.Introduction...3 2.Qu'est-ce que la salinité?...3
Kourou Novembre 2010. MANGOTECHNO Mesure de Salinité Réalisation d'un conductimètre Frédéric BOUCHAR (TENUM Toulouse) Version 1.0 Table des matières 1.Introduction...3 2.Qu'est-ce que la salinité?...3
C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. www.sensopart.com
 C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. 22 2 Déballer, paramétrer et démarrer : les capteurs de vision n ont jamais été aussi puissants pour une manipulation
C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. 22 2 Déballer, paramétrer et démarrer : les capteurs de vision n ont jamais été aussi puissants pour une manipulation
- I - Fonctionnement d'un détecteur γ de scintillation
 U t i l i s a t i o n d u n s c i n t i l l a t e u r N a I M e s u r e d e c o e ffi c i e n t s d a t t é n u a t i o n Objectifs : Le but de ce TP est d étudier les performances d un scintillateur pour
U t i l i s a t i o n d u n s c i n t i l l a t e u r N a I M e s u r e d e c o e ffi c i e n t s d a t t é n u a t i o n Objectifs : Le but de ce TP est d étudier les performances d un scintillateur pour
modélisation solide et dessin technique
 CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
Introduction à l électronique de puissance Synthèse des convertisseurs statiques. Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER
 Introduction à l électronique de puissance Synthèse des convertisseurs statiques Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER 28 janvier 2007 Table des matières 1 Synthèse des convertisseurs
Introduction à l électronique de puissance Synthèse des convertisseurs statiques Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER 28 janvier 2007 Table des matières 1 Synthèse des convertisseurs
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs
 DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
Séquence rédigée de manière provisoire : Document de travail FAIRE ROULER - "Petites Voitures" CYCLE II
 Séquence rédigée de manière provisoire : Document de travail FAIRE ROULER - "Petites Voitures" CYCLE II Point du programme Choisir un outil en fonction de son usage et mener à bien une construction simple.
Séquence rédigée de manière provisoire : Document de travail FAIRE ROULER - "Petites Voitures" CYCLE II Point du programme Choisir un outil en fonction de son usage et mener à bien une construction simple.
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
Résonance Magnétique Nucléaire : RMN
 21 Résonance Magnétique Nucléaire : RMN Salle de TP de Génie Analytique Ce document résume les principaux aspects de la RMN nécessaires à la réalisation des TP de Génie Analytique de 2ème année d IUT de
21 Résonance Magnétique Nucléaire : RMN Salle de TP de Génie Analytique Ce document résume les principaux aspects de la RMN nécessaires à la réalisation des TP de Génie Analytique de 2ème année d IUT de
Barrières infrarouge actif double faisceaux Multi fréquences SBT 30F-60F-80F-100F-150F Notice d installation. Logo
 Barrières infrarouge actif double faisceaux Multi fréquences SBT 30F-60F-80F-100F-150F Notice d installation Notice d'installation barriere infra rouge SBT- F - V1.5 du 03042006 1 Guardall Sommaire 1.
Barrières infrarouge actif double faisceaux Multi fréquences SBT 30F-60F-80F-100F-150F Notice d installation Notice d'installation barriere infra rouge SBT- F - V1.5 du 03042006 1 Guardall Sommaire 1.
Aperçu. S35 Franchir les escaliers en toute sécurité.
 Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Casisa Anthony DOSSIER PERSONNEL
 Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
La polarisation des transistors
 La polarisation des transistors Droite de charge en continu, en courant continu, statique ou en régime statique (voir : le transistor) On peut tracer la droite de charge sur les caractéristiques de collecteur
La polarisation des transistors Droite de charge en continu, en courant continu, statique ou en régime statique (voir : le transistor) On peut tracer la droite de charge sur les caractéristiques de collecteur
NO-BREAK KS. Système UPS dynamique PRÉSENTATION
 NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
ID 15 l alternative intelligente au système de code à barres. Le système d identification ID 15 de Rexroth
 ID 15 l alternative intelligente au système de code à barres Le système d identification ID 15 de Rexroth 2 Identification des pièces sans erreur même dans les conditions les plus difficiles Le système
ID 15 l alternative intelligente au système de code à barres Le système d identification ID 15 de Rexroth 2 Identification des pièces sans erreur même dans les conditions les plus difficiles Le système
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations
 Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Le transistor bipolaire
 IUT Louis Pasteur Mesures Physiques Electronique Analogique 2ème semestre 3ème partie Damien JACOB 08-09 Le transistor bipolaire I. Description et symboles Effet transistor : effet physique découvert en
IUT Louis Pasteur Mesures Physiques Electronique Analogique 2ème semestre 3ème partie Damien JACOB 08-09 Le transistor bipolaire I. Description et symboles Effet transistor : effet physique découvert en
Cours de Résistance des Matériaux (RDM)
") Solides déformables Cours de Résistance des Matériau (RDM) Structure du toit de la Fondation Louis Vuitton Paris, architecte F.Gehry Contenu 1 POSITIONNEMENT DE CE COURS... 2 2 INTRODUCTION... 3 2.1 DEFINITION
Solides déformables Cours de Résistance des Matériau (RDM) Structure du toit de la Fondation Louis Vuitton Paris, architecte F.Gehry Contenu 1 POSITIONNEMENT DE CE COURS... 2 2 INTRODUCTION... 3 2.1 DEFINITION
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Hémomixer Etude des sollicitations du corps d épreuve
 Hmomixer Etude des sollicitations du corps d preuve TP 2 heures Noms : Prnoms : Classe : Date : Note : /20 Objectifs A l issue de la sance vous devez être en mesure : - de dire de quelle nature est la
Hmomixer Etude des sollicitations du corps d preuve TP 2 heures Noms : Prnoms : Classe : Date : Note : /20 Objectifs A l issue de la sance vous devez être en mesure : - de dire de quelle nature est la
Chapitre 2 : Systèmes radio mobiles et concepts cellulaires
 Chapitre 2 : Systèmes radio mobiles et concepts cellulaires Systèmes cellulaires Réseaux cellulaires analogiques de 1ère génération : AMPS (USA), NMT(Scandinavie), TACS (RU)... Réseaux numériques de 2ème
Chapitre 2 : Systèmes radio mobiles et concepts cellulaires Systèmes cellulaires Réseaux cellulaires analogiques de 1ère génération : AMPS (USA), NMT(Scandinavie), TACS (RU)... Réseaux numériques de 2ème
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
Mario Geiger octobre 08 ÉVAPORATION SOUS VIDE
 ÉVAPORATION SOUS VIDE 1 I SOMMAIRE I Sommaire... 2 II Évaporation sous vide... 3 III Description de l installation... 5 IV Travail pratique... 6 But du travail... 6 Principe... 6 Matériel... 6 Méthodes...
ÉVAPORATION SOUS VIDE 1 I SOMMAIRE I Sommaire... 2 II Évaporation sous vide... 3 III Description de l installation... 5 IV Travail pratique... 6 But du travail... 6 Principe... 6 Matériel... 6 Méthodes...
Chapitre 11 Bilans thermiques
 DERNIÈRE IMPRESSION LE 30 août 2013 à 15:40 Chapitre 11 Bilans thermiques Table des matières 1 L état macroscopique et microcospique de la matière 2 2 Énergie interne d un système 2 2.1 Définition.................................
DERNIÈRE IMPRESSION LE 30 août 2013 à 15:40 Chapitre 11 Bilans thermiques Table des matières 1 L état macroscopique et microcospique de la matière 2 2 Énergie interne d un système 2 2.1 Définition.................................
Utilisation du visualiseur Avermedia
 Collèges Numériques Utilisation du visualiseur Avermedia Un visualiseur est aussi appelé caméra de table et ce nom rend mieux compte de sa fonction première à savoir filmer un document (revue,carte, dissection,
Collèges Numériques Utilisation du visualiseur Avermedia Un visualiseur est aussi appelé caméra de table et ce nom rend mieux compte de sa fonction première à savoir filmer un document (revue,carte, dissection,
Informations produits scalamobil S35 scalacombi S36
 Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
«Tous les sons sont-ils audibles»
 Chapitre 6 - ACOUSTIQUE 1 «Tous les sons sont-ils audibles» I. Activités 1. Différents sons et leur visualisation sur un oscilloscope : Un son a besoin d'un milieu matériel pour se propager. Ce milieu
Chapitre 6 - ACOUSTIQUE 1 «Tous les sons sont-ils audibles» I. Activités 1. Différents sons et leur visualisation sur un oscilloscope : Un son a besoin d'un milieu matériel pour se propager. Ce milieu
CENTRALE D ALARME SANS FILS
 CENTRALE D ALARME SANS FILS Cher client, Nous vous remercions d avoir fait l acquisition de notre appareil, avant de commencer son installation veuillez lire le mode d emploi joint et prenez note de ce
CENTRALE D ALARME SANS FILS Cher client, Nous vous remercions d avoir fait l acquisition de notre appareil, avant de commencer son installation veuillez lire le mode d emploi joint et prenez note de ce
Étude de marché sur les possibilités d utilisation de l aluminium dans les ponts routiers
 Étude de marché sur les possibilités d utilisation de l aluminium dans les ponts routiers SOMMAIRE Préparé pour: Étude réalisée par : Viami International Inc. et The Technology Strategies Group Le 24 mai
Étude de marché sur les possibilités d utilisation de l aluminium dans les ponts routiers SOMMAIRE Préparé pour: Étude réalisée par : Viami International Inc. et The Technology Strategies Group Le 24 mai
Neu. Technique d installation / de surveillance. VARIMETER RCM Contrôleur différentiel type B IP 5883
 Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
TP - Alarme de voiture / Approche fonctionnelle
 TP - Alarme de voiture / Approche fonctionnelle Tous les objets techniques, même les plus compliqués, sont étudiés à l aide d une méthode appelée : étude fonctionnelle ou systémique. 1/ Présentation du
TP - Alarme de voiture / Approche fonctionnelle Tous les objets techniques, même les plus compliqués, sont étudiés à l aide d une méthode appelée : étude fonctionnelle ou systémique. 1/ Présentation du
Union générale des étudiants de Tunisie Bureau de l institut Préparatoire Aux Etudes D'ingénieurs De Tunis. Modèle de compte-rendu de TP.
 Union générale des étudiants de Tunisie Modèle de compte-rendu de TP Dipôle RC Ce document a été publié pour l unique but d aider les étudiants, il est donc strictement interdit de l utiliser intégralement
Union générale des étudiants de Tunisie Modèle de compte-rendu de TP Dipôle RC Ce document a été publié pour l unique but d aider les étudiants, il est donc strictement interdit de l utiliser intégralement
TP Détection d intrusion Sommaire
 TP Détection d intrusion Sommaire Détection d intrusion : fiche professeur... 2 Capteur à infra-rouge et chaîne de mesure... 4 Correction... 14 1 Détection d intrusion : fiche professeur L'activité proposée
TP Détection d intrusion Sommaire Détection d intrusion : fiche professeur... 2 Capteur à infra-rouge et chaîne de mesure... 4 Correction... 14 1 Détection d intrusion : fiche professeur L'activité proposée
Capteur mécanique universel HF 32/2/B
 Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
14.01 14.71. 6 fonctions 1 NO Montage sur rail 35 mm (EN 60715) 16/30 (120 A - 5 ms) 16/30 (120 A - 5 ms) Tension nom./tension max.
 16/30 (120 A - 5 ms) 16/30 (120 A - 5 ms) Tension nom./tension max.") Série 14 - Minuteries cage d escalier 16 A SERE 14 Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis
Série 14 - Minuteries cage d escalier 16 A SERE 14 Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis
T.I.P.E. Optimisation d un. moteur
 LEPLOMB Romain Année universitaire 2004-2005 LE ROI Gautier VERNIER Marine Groupe Sup B, C, D Professeur accompagnateur : M. Guerrier T.I.P.E Optimisation d un moteur 1 1. Présentation du fonctionnement
LEPLOMB Romain Année universitaire 2004-2005 LE ROI Gautier VERNIER Marine Groupe Sup B, C, D Professeur accompagnateur : M. Guerrier T.I.P.E Optimisation d un moteur 1 1. Présentation du fonctionnement
The new era. La gamme Active
 Août 2013 / FR The new era. www.the-new-era.com Robert Bosch GmbH Bosch ebike Systems Postfach 1342 72703 Reutlingen Germany www.bosch-ebike.com www.facebook.com/boschebikesystems Bosch ebike Systems 2014
Août 2013 / FR The new era. www.the-new-era.com Robert Bosch GmbH Bosch ebike Systems Postfach 1342 72703 Reutlingen Germany www.bosch-ebike.com www.facebook.com/boschebikesystems Bosch ebike Systems 2014
Chapitre XIV BASES PHYSIQUES QUANTITATIVES DES LOIS DE COMPORTEMENT MÉCANIQUE. par S. CANTOURNET 1 ELASTICITÉ
 Chapitre XIV BASES PHYSIQUES QUANTITATIVES DES LOIS DE COMPORTEMENT MÉCANIQUE par S. CANTOURNET 1 ELASTICITÉ Les propriétés mécaniques des métaux et alliages sont d un grand intérêt puisqu elles conditionnent
Chapitre XIV BASES PHYSIQUES QUANTITATIVES DES LOIS DE COMPORTEMENT MÉCANIQUE par S. CANTOURNET 1 ELASTICITÉ Les propriétés mécaniques des métaux et alliages sont d un grand intérêt puisqu elles conditionnent
La mécanique sous le capot
 La mécanique sous le capot L ergonomie Comment éviter et diminuer les TMS aux membres supérieurs Pourquoi vos articulations vous font-elles souffrir? De nombreux travailleurs souffrent de troubles musculo-squelettiques
La mécanique sous le capot L ergonomie Comment éviter et diminuer les TMS aux membres supérieurs Pourquoi vos articulations vous font-elles souffrir? De nombreux travailleurs souffrent de troubles musculo-squelettiques
LE PROBLEME DU PLUS COURT CHEMIN
 LE PROBLEME DU PLUS COURT CHEMIN Dans cette leçon nous définissons le modèle de plus court chemin, présentons des exemples d'application et proposons un algorithme de résolution dans le cas où les longueurs
LE PROBLEME DU PLUS COURT CHEMIN Dans cette leçon nous définissons le modèle de plus court chemin, présentons des exemples d'application et proposons un algorithme de résolution dans le cas où les longueurs
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Mesures et incertitudes
 En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
La correction des erreurs d'enregistrement et de traitement comptables
 La correction des erreurs d'enregistrement et de traitement comptables Après l'étude des différents types d'erreurs en comptabilité (Section 1) nous étudierons la cause des erreurs (Section 2) et les techniques
La correction des erreurs d'enregistrement et de traitement comptables Après l'étude des différents types d'erreurs en comptabilité (Section 1) nous étudierons la cause des erreurs (Section 2) et les techniques