PRESENTATION GENERALE
|
|
|
- Alexandre Robillard
- il y a 8 ans
- Total affichages :
Transcription
1 PRESENTATION GENERALE 1 LA NAISSANCE DU SCOOT'ELEC. C'est à partir des années quatre-vingt que PEUGEOT MOTOCYCLES a débuté ses premières études sur le scooter électrique. Bénéficiant d'un contexte technologique favorable avec la miniaturisation des composants électroniques de puissance, les progrès réalisés sur les batteries et l'évolution significative du "désign" des scooters, il devenait alors envisageable de concevoir un scooter à propulsion électrique qui intégrait les contraintes telles que l'encombrement et le poids, tout en offrant des performances comparables à celles d'un scooter thermique. Dans les années quatre-vingt-dix, les attentes environnementales de plus en plus fortes de la part du grand public et des utilisateurs traditionnels de deux roues ont conduit PEUGEOT à s'engager dans une phase active de développement du projet et d'industrialisation du projet. Une expérimentation, conduite à Strasbourg, a permis de définir avec précision les attentes des utilisateurs, de tester et de valider des choix technologiques, puis de fixer le cahier des charges définitif du Scoot'élec. PEUGEOT MOTOCYCLES -PR 1-

2 2 PERFORMANCES. Scoot'élec a les mêmes performances qu'un scooter thermique de moins de 50 cm 3. En usage urbain, il offre de nombreux avantages et peu d'inconvénients. Il s'intègre facilement dans le trafic. La puissance progressive de son moteur permet une conduite souple, fluide et sans à-coups. Son entretien est réduit et sa consommation très économique. L'engin, silencieux et propre, est nerveux, véloce, et maniable. Sa vitesse maximale est de 45 km/h et il parcourt le 100 m départ arrêté en 12 secondes. Son constructeur revendique une autonomie de 45 km à pleine vitesse et de 30 km en cycle urbain (selon cycle typique du cahier des charges fonctionnel). 3 - EQUIPEMENTS SPECIFIQUES. Outre les commandes et les indicateurs "classiques", Scoot'élec présente une instrumentation spécifique. Le tableau de bord comprend : un indicateur d'énergie, des témoins de mise en marche, de mode de fonctionnement, de défaut d'alimentation du circuit électrique, un avertisseur de présence et un clavier à touches pour la fonction antivol et la sélection du mode de roulage (normal ou économique). N.B. Pour faciliter les manœuvres de "parking", Scoot'élec dispose d'une vitesse de manutention dite "vitesse ambulatoire" limitée à 5 km/h. 4 - CARACTERISTIQUES TECHNIQUES. 4.1 Le moteur. Les premiers prototypes construits utilisaient des moteurs à aimants permanents. Ils furent abandonnés à cause de leur manque de couple et de leur faible rendement sur fortes charges. La deuxième génération a utilisé le moteur série, mais c'est finalement le moteur à excitation séparée qui a été retenu et qui équipe la version commercialisée aujourd'hui. Associé au modulateur électronique d'énergie, ce choix de moteur garantit un fonctionnement optimal. -PR 2-
. 3 - EQUIPEMENTS SPECIFIQUES.")
3 4.2 L'unité de commande électronique (UCE). Scoot'élec est équipé d'une unité de commande électronique qui concentre toute l'intelligence du scooter. L'UCE comprend une unité centrale et un module d'électronique de puissance. L'UCE est l'interface entre le moteur et la batterie. Elle règle en permanence le point de fonctionnement du moteur afin d'optimiser l'utilisation de l'énergie électrique. Elle contrôle le courant dans les circuits de puissance et gère l'énergie de freinage lorsque le pilote décélère. L'UCE gère l'ensemble des fonctions de communication homme-machine (surveillance du fonctionnement, sécurité-antivol, éclairage, signalisation, charge des batteries, compteur d'énergie, etc). Elle détecte les anomalies, analyse et mémorise les défauts. Elle active, si besoin est, un disjoncteur de sécurité qui immobilise le véhicule. La carte UC (voir synoptique ci-dessous) fait appel à un microcontrôleur qui pilote les deux hacheurs à transistors MOS nécessaires à l'alimentation du moteur à courant continu. Le modulateur de puissance permet à l'utilisateur de gérer l'énergie disponible et de sélectionner le mode de fonctionnement, normal ou économique, désiré. En mode économique, les accélérations sont réduites et la vitesse est limitée à 30 km/h. L'autonomie du scooter est alors portée à 60 km. Documentation PEUGEOT Synoptique de l'équipement électrique du scooter -PR 3-

4 4.3 Les batteries Scoot'élec est équipé de trois monoblocs de batterie nickel-cadmium (100 Ah / 6 V) recyclables à 100 %. La batterie cadmium-nickel présente de nombreux avantages : elle accepte un minimum de 1000 cycles de charge/décharge sans subir de dommage et sans effet mémoire, sa durée de vie permet de parcourir environ km en utilisation normale, sa densité énergétique est élevée et permet d'atteindre jusqu'à 60 km d'autonomie sur route, son entretien se réduit au contrôle du niveau d'eau deux à trois fois par an. 4.4 La recharge Muni d'un chargeur embarqué et d'un cordon de charge placé sous la selle, Scoot'élec se branche sur une prise domestique 230 V - 16 A / 2 P + PE. Une charge complète (batterie vide) nécessite cinq heures. Les deux premières heures permettent de récupérer 95 % de la capacité totale de la batterie. Les trois dernières heures servent à l'égalisation des monoblocs. En charge partielle, dix minutes suffisent à récupérer 5,5 km d'autonomie. N.B. Scoot'élec dispose également d'une prise spéciale sur laquelle on peut adapter un chargeur rapide livrable en option. 5 - DISPOSITIFS DE SECURITE 5.1 L'anti-démarrage codé. Pour lutter contre le vol, Scoot'élec est équipé d'un anti-démarrage codé à quatre chiffres défini par l'utilisateur et modifiable à son gré. 5.2 Le coupe-circuit. A tout moment, l'utilisateur peut actionner un bouton de sécurité dit "bouton coupe-circuit" placé sur le tableau de bord. Le véhicule est alors immédiatement immobilisé et ne peut repartir qu'en désactivant l'anti-démarrage codé. 5.3 L'avertisseur de présence. Scoot'élec étant naturellement silencieux, il est équipé d'un avertisseur de présence pour les pietons. -PR 4-

5 6 - CAHIER DES CHARGES FONCTIONNEL FONCTIONS CRITERES NIVEAUX Vitesse maximale Accélération Aptitude au démarrage en cote Cycle urbain caractéristique 45 km/h 100 m départ arrêté en 12s 10 m départ arrêté en 3.05 s 17 % maximum à pleine charge Vitesse moyenne 27 km/h DEPLACEMENT Vitesses C stes Vitesse lente (0.5 km/h) Vitesse maximale à plat 10% du temps 10% du temps Cote à 10 % à 34 km/h 10% du temps accélération maximale 30% du temps Accélérations accélération 1.5m.s -2 20% du temps accélération 1m.s -2 10% du temps Freinage 10% du temps TRANSPORT Masse transportée Age du conducteur 80 kg maximum 16 ans minimum Hauteur de selle 780 mm ± 5% FIABILITE Durée de vie km ou h. minimum AUTONOMIE Distance parcourue à la vitesse maximale Distance parcourue en mode économique Distance parcourue en cycle urbain 45 km 60 km 40 km MANIABILITE REGLEMENTATION Chargeur Alimentation Temps de charge Encombrement Vitesse maximale imposée embarqué 230 V / 16 A maximum 6 h maximum Identique, à 5% près, du scooter thermique équivalent "Vivacity 50" ( L x l x h = 1740 x 700 x 1140) 45 km/h en France 25 km/h en R.F.A et en Suisse -PR 5-

6 7 - CARACTERISTIQUES TECHNIQUES Dimensions L x l x h = 1740 x 670 x1100 Masse à vide 115 kg CHASSIS ENERGIE CHARGEUR ELECTRONIQUE DE COMMANDE MOTEUR 3 batteries Cadmium-Nickel 6V / 100 Ah Couplage série Masse totale 38,4 kg Embarqué 1400 W, 230V 2P + PE, 7A Temps de charge 5 heures ( 2 h de charge principale, 3 h de surcharge à courant réduit) Centralisée avec microcontroleur 2 hacheurs à transistors (MOSFET) Freinage par récupération d'énergie Courant continu à excitation séparée Puissance maximale 3 kw pendant 5 minutes maximum Puissance nominale 1.3 kw à 4300 tr.min -1 Rendement minimum du moteur > 68 % sur l'intégralité de la plage de fonctionnement. -PR 6-

7 CRANTEE PROFIL PGGT GT 5MR GATES POWER GRIP MODE DE FONCTIONNEMENT Taux d'utilisation 10.00% 10.00% 10.00% 20.00% 30.00% 10.00% N poulie mot. (tr.min -1 ) COURROIE P transmise (W) Durée de vie 2000 h Tension nominale 236 N Rendement 91% VERSIONS Vitesse limitée à 45 km/h Poulie motrice Dp = ; Z = 34 Poulie réceptrice Dp = ; Z = 64 Vitesse limitée à 25 km/h Poulie motrice Dp = ; Z = 27 Poulie réceptrice Dp = ; Z = 70 Les deux versions ont le même entraxe ± CYLINDRIQUE A DENTURE HELICOÏDALE ENGRENAGE Module normal 1.5 mm β = 17 α = 20 Nombre de dents Z Diamètres primitifs Déports (mm) PNEU AVANT Entraxe = 47 ± 0.03 Lubrifiant 85W-140 SAE 327 mm 2 /s Rendement de l'engrenage 0.97 Pignon Roue PNEU ARRIERE PNEUMATIQUES Tubeless 100/80.10 Pression de gonflage 5 bars Diamètre du pneumatique 411 mm Développement mm Tubeless 100/80.10 Pression de gonflage 5 bars Diamètre du pneumatique 427 mm Développement mm Résistance au roulement δ = 4 mm TAMBOUR FREINS Diamètre 110 mm Commande par câble et came coefficient d adhérence du ferodo 0.5 à 100 C 0.35 à 300 C -PR 7-
 PNEU AVANT Entraxe = 47 ± 0.")
8 Secteur 230V 50Hz Chargeur embarqué Présence Secteur Sécurité Clé de contact KM +B +AC SCOOT'ELEC Schéma électrique général F1 M Bat. 18V Prise Charg. Opt. TR TR Prise diag Carte U.C. 7 voyants Logométre Hacheur Induit Cde bruiteur Protect. court-cir. Bruiteur Capteur vitesse ALP 13V eff CLIGN. 13V eff / 1Hz Hacheur Excitation Feu Stop Béquille Selle Frein Accélé. Clavier 6 touches Tableau de Bord -PR 8-

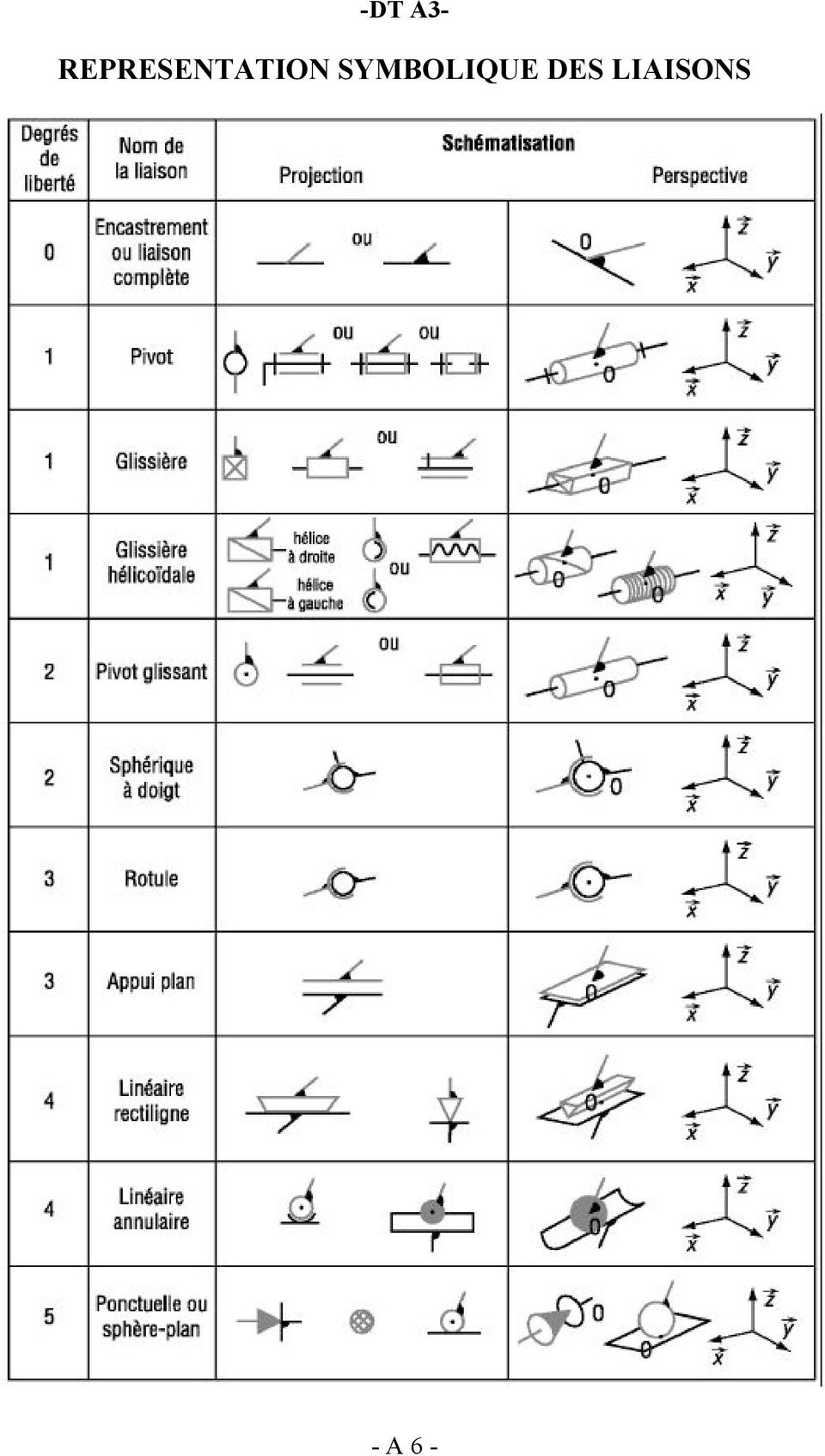
9 A.1 ANALYSE CINEMATIQUE DE LA TRANSMISSION. Objectif de l'étude : déterminer les caractéristiques d'entrée et de sortie d'une chaîne cinématique, déterminer les caractéristiques des informations prélevées sur la partie opérative. A.1.1 SCHEMA CINEMATIQUE. A partir du plan d ensemble et de la nomenclature (documents techniques DTA1 et DTA2), en utilisant le tableau de représentation symbolique des liaisons (document technique DT A3) : ETABLIR, selon la coupe AA, le schéma cinématique de la transmission du mouvement de rotation entre le moteur électrique et l arbre de sortie (5) lié à la roue arrière. INDIQUER les caractéristiques cinématiques des composants participant au mouvement (nombre de dents). A.1.2 RAPPORT DE TRANSMISSION. DEMONTRER que le rapport de transmission a pour valeur ω ω 5/ I 9/ I = 0.14 (I) : Ensemble des pièces en liaison fixe avec le carter gauche (1). A.1.3 CARACTERISTIQUE CINEMATIQUE DE SORTIE. CALCULER la vitesse de translation du scooter en km/h, pour une fréquence de rotation du moteur n = 4250 tr.min -1. On considérera que la roue arrière a un diamètre de 400 mm en tenant compte de l'écrasement du pneumatique. A.1.4 INFORMATION VITESSE. La mesure de la vitesse du scooter est réalisée par le capteur (11) sur la couronne (12). CALCULER la fréquence des impulsions du capteur ( nombre d impulsions / seconde ) pour la vitesse ambulatoire (voir dossier de présentation). - A 1 -
, en utilisant le tableau de représentation symbolique des liaisons (document technique DT A3) : ETABLIR, selon la")
10 A.2 ETUDE DU COUPLE ET DE LA PUISSANCE TRANSMISSIBLES. Le cahier des charges du scoot'élec précise qu'avec un moteur de puissance maximale égale à 3 kw, le scooter doit être capable de gravir, en charge nomimale, une pente à 17 % à la vitesse constante de 20 km/h, On se propose, dans la suite de l'étude, de vérifier cette performance fonctionnelle : On adopte la modélisation suivante : le scooter et le conducteur sont considérés comme un ensemble indéformable, le scooter est en mouvement de translation rectiligne uniforme, en montée sur une pente à 17 %. Sa vitesse est x = - 20 km / h les contacts entre le sol, les roues avant et arrière s effectuent respectivement aux points A et B, ce qui revient à négliger l écrasement des pneumatiques, la résistance au roulement, entre les roues et le sol, est négligée, le facteur de frottement roue / sol est tel qu il n y a pas de glissement au contact en B entre la roue arrière motrice et le sol. le plan (O, X, Y ) constitue un plan de symétrie. On donne : poids du scooter : P s = 1150 N, appliqué au centre de gravité G s, poids du conducteur : P c = 800 N, appliqué au centre de gravité G c, action de l air sur l ensemble scooter + conducteur en absence de vent : F (appliquée en T et opposée au sens de déplacement du scooter) F = 1/2ρ.S.C x.x 2 = 0,30.x 2 (x' en m.s -1 et F en N) - A 2 -

11 A.2.1 ISOLEMENT DE LA ROUE AVANT. Sachant que la liaison pivot, entre la roue et la structure porteuse est parfaite : ISOLER la roue avant, MONTRER que l action de contact du sol sur la roue avant en A est perpendiculaire au sol : soit sol : A / roue = Y. y A A.2.2 ISOLEMENT DE LA ROUE ARRIERE. Sachant que la liaison pivot, entre la roue et la structure porteuse est parfaite, ISOLER le roue arrière, ECRIRE la relation entre le couple exercé par la transmission et l action du sol sur la roue. On posera : sol B / roue = X. x + Y. y B B A.2.3 ISOLEMENT DE L'ENSEMBLE SCOOTER + CONDUCTEUR. A En fonction de la modélisation énoncée précédemment, REALISER l inventaire des actions mécaniques extérieures agissant sur cet ensemble. A2.3.2 Après avoir appliqué le principe fondamental de la statique, DETERMINER la valeur numérique du couple que doit exercer la transmission sur la roue arrière. A DETERMINER la puissance fournie par le moteur si la transmission a un rendement global égal à 0,88. A.2.4 SYNTHESE. A partir de la courbe caractéristique donnant la puissance maximale fournie par le moteur en fonction de la vitesse du scooter ( Document technique DT A4 ), PLACER le point de fonctionnement trouvé à la question précédante. CONCLURE. Toujours pour une pente de 17 %, on se place maintenant à la vitesse x = - 30 km / h. En reprenant les conclusions de l étude conduite pour x = - 20 km / h : CALCULER la puissance que doit fournir le moteur pour cette nouvelle vitesse, CONCLURE sur l'aptitude du moteur à réaliser cette performance, ESTIMER graphiquement la vitesse maximum que peut atteindre le moteur. - A 3 -

12 - A 4 -
13 -DT A2- NOMENCLATURE REP NB DESIGNATION MATIERE OBSERVATIONS 1 1 Carter gauche AS 9 U3 Y Moteur CC 3 1 Carter droit AS9 U3 Y Arbre primaire 16 CD 4 Z = 13 dents 5 1 Arbre de sortie 18 CD Roue de sortie 16 CD4 Z = 47 dents 7 1 Poulie réceptrice AS 9U3 Y40 Z = 67 dents 8 1 Couvercle gauche 9 1 Poulie motrice 35 MF6 Z = 34 dents 10 1 Courroie GT 5 MR Capteur de vitesse inductif 12 1 Couronne du capteur 13 1 Joint plat 14 1 Vis d'arbre moteur 15 1 Rondelle d'arbre moteur 16 5 Vis H M Vis de fixation capteur 18 1 Vis indémontable 19 1 Ecrou à embase HM Roulement à billes Roulement à billes Roulement à billes Roulement à billes Joint à lèvre 26x42x Rondelle ressort 10x20x Entretoise 12x20x5 35 MF Rondelle d'appui du capteur 29 1 Joint à lèvre 17x30x Roulement à billes Vis H M Couvercle droit ABS 33 1 Jante - A 5 -

14 -DT A3- REPRESENTATION SYMBOLIQUE DES LIAISONS - A 6 -
15 -DT A4- CARACTERISTIQUE MOTEUR P = F(V) Puissance en W Vitesse du Scooter en km / h - A 7 -

16 A.1 ANALYSE CINEMATIQUE DE LA TRANSMISSION. A.1.1 Schéma cinématique de la transmission. A.1.2 Rapport de transmission. A.1.3 Vitesse du scooter. A.1.4 Fréquence des impulsions du capteur. -DR A 1 -

17 A.2. ETUDE DU COUPLE ET DE LA PUISSANCE TRANSMISSIBLES. A.2.1 Action du sol sur la roue avant. A.2.2 Relation entre le couple exercé par la transmission et l'action en B du sol sur la roue arrière. A Inventaire des actions extérieures agissant sur l'ensemble scooter + conducteur. -DR A 2 -

18 A Valeur numérique du couple exercé par la transmission sur la roue arrière. A Puissance fournie par le moteur. A.2.4 Points de fonctionnement. x' = - 20 km / h x' = - 30 km / h Puissance en W Vitesse du Scoot'Elec en km / h -DR A 3 -

19 Conclusion relative à la vitesse x' = - 20 km / h : Puissance nécessaire du moteur pour gravir la pente à la vitesse x' = - 30 km / h : Conclusion relative à la vitesse x' = - 30 km / h : Estimation de la vitesse maximale du scooter : -DR A 4 -

20 INTRODUCTION. La conversion de l'énergie électrique en énergie mécanique est assurée par un moteur à courant continu à excitation séparée. Pour permettre le réglage de la vitesse, de l accélération et du freinage l'énergie est modulée par deux hacheurs intégrés à l'unité de commande électronique (Voir dossier de présentation). B.1 ETUDE DE LA MOTORISATION : Pour satisfaire aux contraintes du Cahier des Charges Fonctionnel, le moteur électrique doit impérativement : Fonctionner dans une plage de vitesse allant de 0 à 4300 tr.min -1. Fournir un couple important à basse vitesse (démarrage). Offrir un rendement le plus élevé possible sur toute la plage de fonctionnement. But de l étude : Valider la puissance utile du moteur. Analyser et justifier le choix de motorisation effectué par le constructeur. Caractériser la technique de pilotage du moteur. Identifier et caractériser les différentes parties du moteur. Notations : P u Puissance utile sur l arbre (en W) Φ flux inducteur (en Webers) T u couple utile sur l arbre (en N.m) E force électromotrice (en V) U a tension d induit (en V) I e courant d excitation (en A) I a courant d induit (en A) U e tension d excitation (en V) n fréquence de rotation (en tr.s -1 ) N Nb de conducteurs actifs de l'induit P Nb de paires de pôles Ω Vitesse angulaire (en rd.s -1 ) a Nb de paires de voies d'enroulement P em Puissance électromagnétique Formules : E = (P/a).N.n. Φ P u = T u. Ω P em = E.I a E = U a R.I a -B 1-
. Offrir un rendement le plus élevé possible sur toute la plage de fonctionnement. But de l étude : Valider la puissance utile du moteur.")
21 B.1.1 ETUDE DE LA PUISSANCE DU MOTEUR : Pour la suite de l'étude on retiendra les données suivantes : pour permettre le démarrage en charge normale sur pente à 17%, le moteur doit être capable de fournir une puissance minimale de 3 kw à 2000 tr.min -1 pour maintenir une vitesse stabilisée de 45 km/h sur le plat en charge normale, le moteur doit être capable de fournir une puissance minimale de 1000 W à 4300 tr.min -1. But de l étude : Vérifier que la puissance du moteur choisi par le constructeur correspond aux besoins exprimés lors de l étude mécanique. B Puissance aux points caractéristiques. Les caractéristiques du moteur permettent-elles au scooter électrique et à son conducteur de démarrer sur pente à 17 % et de rouler à 45 km / h sur le plat? JUSTIFIER votre réponse à partir de l'analyse du relevé de performances du moteur (document technique DTB 2 ). B Gabarit "puissance en fonction de la vitesse". Pour "qualifier globalement" les performances attendues des moteurs, le service "contrôle qualité" de PEUGEOT MOTOCYCLE a déterminé une enveloppe standard "puissance / vitesse", dans laquelle chaque moteur doit impérativement s'inscrire (voir document technique DTB 3 ). On se propose de vérifier que le moteur dont le relevé de performance est fourni sur le document technique DTB 2, s inscrit dans le gabarit de qualification PEUGEOT. TRACER la caractéristique P u = f(n) pour les points P 1 à P 7 inclus. B Synthèse : La caractéristique de puissance du moteur choisi convient-elle à l'utilisation "scooter électrique"? CONCLURE. B.1.2 ETUDE DU COUPLE MOTEUR : But de l étude : Valider le choix du type de moteur et son mode d excitation. B Notion de couple moteur. Le scooter électrique est utilisé, pour l'essentiel, en ville. Les démarrages et les accélérations sont fréquents. Dans ces conditions d'utilisation, la caractéristique de couple T = f(n) est une donnée essentielle pour le choix du moteur et de son principe de pilotage. CITER la formule de mécanique qui lie le couple moteur à l accélération. PRECISER la signification des différents termes utilisés. B Etude de la relation couple / courant. ETABLIR la relation littérale associant le couple utile aux courants d induit et d inducteur (les pertes mécaniques propres au moteur seront négligées). -B 2-
22 B Choix du type de moteur En l'absence de tout dispositif électronique de modulation de l'énergie électrique, PRECISER quel serait le type de moteur à courant continu (série, shunt, indépendant,..) qui conviendrait le mieux à l'application étudiée? JUSTIFIER votre réponse aux plans scientifique et technique. B Analyse du choix du constructeur. Dans le respect des contraintes du cahier des charges du scoot élec (tension d'alimentation, masse, volume, centre de gravité, etc. ) le constructeur s est livré à une étude comparative entre deux machines de puissance identique mais de "technologie" différente. Les relevés d'essais sont donnés dans les documents techniques DTB 4 et DTB 5. Le constructeur a finalement choisi un moteur à "excitation séparée". ANALYSER les documents proposés et JUSTIFIER son choix dans le contexte d'utilisation. B Etude de la variation du courant d excitation. La modulation d énergie mise en œuvre dans le scooter repose sur le principe de la «surexcitation» permettant de fournir des couples élevés à basse vitesse. Nous vous proposons de vérifier que ce type de fonctionnement repose sur une variation contrôlée du courant dans l'inducteur. A partir des caractéristiques nominales du moteur (voir document technique DTB1), en supposant que le moteur fonctionne à flux constant ( I e = I e nominal = C ste ) et que les pertes mécaniques sont négligeables, CALCULER la constante de couple du moteur (K t ), en prenant pour hypothèse : T u = K t.i a CALCULER la constante électrique du moteur (K e ) qui lie la fréquence de rotation à la f.e.m A partir des caractéristiques déterminées ci-dessus, CALCULER quelle serait la valeur de la f.e.m. moteur permettant d'obtenir la vitesse de rotation de 4300 tr.min -1 correspondant à la vitesse maximale du scooter (45 km/h). CALCULER quelle serait la valeur du courant d induit permettant d'obtenir le couple de 14 N.m requis lors d'un démarrage sur pente à 17 %. B Synthèse : COMPARER les résultats obtenus ci-dessus au relevé de performances de l'ensemble moteur variateur du document technique DTB 2. CONCLURE sur le réglage du courant d'excitation et sur le pilotage de la variation du flux inducteur. B Aptitude au freinage : Le cahier des charges du scoot élec précise que le ralentissement en "frein moteur" s opère par "récupération d énergie". HACHURER dans le repère couple / vitesse la(les) zone(s) correspondante(s) au(x) quadrant(s) de fonctionnement du scooter électrique. VERIFIER l'aptitude du moteur à assurer ce fonctionnement. PRECISER, pour les différentes phases, le sens des tensions et des courants dans l'induit et dans l'inducteur. -B 3-
23 B.1.3 ETUDE TECHNOLOGIQUE DU MOTEUR. But de l étude : Identifier les parties principales du moteur NOMMER et ENONCER la fonction de chacun des quatre éléments mis en évidence par les photographies ci-dessous. A B C D B.2 CARACTERISER LE MODULATEUR D ENERGIE La structure du modulateur d'énergie retenue par le constructeur est représentée sur le schéma équivalent suivant. Les interrupteurs K 1, K 2, D 1, D 2 et D 3 sont supposés parfaits. i b i a i e u a D 1 D 2 u e U b i K1 i K2 u K1 D3 u K2 K 1 K 2 Symbole d un interrupteur unidirectionnel commandé à la fermeture et à l ouverture. B.2.1 CONTROLE DES COURANTS ET DES TENSIONS. ETABLIR à partir du document technique DTB 2, les valeurs minimales et maximales des tensions et des courants, dans l'induit et dans l'inducteur. -B 4-
24 B.2.2 ETUDE DU HACHEUR D'INDUCTEUR: Pour réaliser cette étude, nous nous placerons dans le cas le plus "défavorable" pour le moteur, c'est à dire pour un fonctionnement du scooter à vitesse établie, en montée sur une pente à 17 % (Point P7 du document technique DTB 2 ). Pour le point de fonctionnement considéré : L ondulation du courant i e est négligeable devant sa valeur moyenne. L ondulation de i a est de +/- 25A autour de sa valeur moyenne. Les deux hacheurs ont la même fréquence de découpage : 16 khz La tension de batterie est considérée constante à 18 V et sa résistance interne négligeable. N.B. Les valeurs indiquées dans le tableau sont des valeurs moyennes But de l étude : Déterminer le courant dans l'inducteur. Choisir l'interrupteur statique adapté. B CALCULER la valeur moyenne de u e à partir du tableau du document technique DTB 2. En déduire le rapport cyclique de commande (α 2 ) de l interrupteur K 2. B CALCULER la valeur moyenne et la valeur crête du courant i K2 B TRACER les chronogrammes de u e, i e, u K2, i K2. (échelles : 1 cm pour 10µs / 1 cm pour 5A / 1 cm pour 5V). B CHOISIR l interrupteur K 2 dans la documentation constructeur (documents techniques DTB 6, DTB 7 et DTB 8 ). PROPOSER un choix "adapté" dans chaque technologie. B Synthèse : CALCULER les pertes en conduction pour chacun des interrupteurs choisis. JUSTIFIER le choix du constructeur pour la technologie MOS. B.2.3 ANALYSE DU FONCTIONNEMENT EN PHASE DE FREINAGE. But de l étude : Les spécifications techniques relatives à l'électronique de commande (voir dossier de présentation) font état d'un dispositif de freinage par "récupération d'énergie". Nous vous proposons d'étudier le principe de fonctionnement de ce freinage et de justifier l architecture du modulateur. Pour la suite de l'étude nous considérerons que le scooter est lancé à 45 km/h en descente (vitesse du moteur égale à 4300 tr.min -1 ) et que la "poignée accélératrice" est totalement relâchée. Dans cette configuration de fonctionnement, la commande des hacheurs d induit et d inducteur provoque : Le blocage de l interrupteur d induit (K 1 ). Le pilotage du hacheur d inducteur (K 2 ). -B 5-
25 B Circulation de l'énergie : INDIQUER, sur les schémas prévus à cet effet, la position (ouverte ou fermée) des interrupteurs de puissance K 1, K 2, D 1, D 2 et D 3 aux instants " t " et " (1 - α) t ". INDIQUER le parcours et le sens de circulation des courants dans le circuit. B Force électromotrice : PRECISER la valeur limite de la force électromotrice E qui permet de fonctionner en mode freinage (on négligera les pertes joules dans l induit). B Limite du dispositif de freinage : Sachant que la caractéristique électrique du moteur s'exprime sous la forme E = 0,027.n.I e et que le courant d excitation, géré par l'uce peut varier entre 10 et 20A. CALCULER la vitesse minimale, V mini (en km/h) jusqu'à laquelle il est théoriquement possible d'obtenir un «freinage moteur». B Synthèse : La solution retenue par le constructeur permet-elle de fonctionner dans les quadrants désirés? CRITIQUER la solution retenue aux plans scientifique, technique et économique. -B 6-
26 DTB1 Scoot élec MOTEUR ELECTRIQUE CARACTERISTIQUES NOMINALES Marque : Référence : SCHABMULLER N130/1.5RK Moteur à courant continu excitation séparée (indépendante) Valeurs nominales : R e = 0,64 Ω R a = 5,2 mω P N = 1300 W n N = 4300 tr.min -1 I N = 120 A U N = 18 V Service : S1 -B 7-
27 PEUGEOT MOTOCYCLE / SERVICE QUALITE RELEVE DE PERFORMANCES DE L'ENSEMBLE MOTEUR VARIATEUR (A) (V) (tr/min) (Nm) % (W) % (W) Ia Ua n Tu Pu / (Ua.Ia) Pe Pu / (Ua.Ia+Pe) Pu 50 17, ,4 76, , , ,8 78, , , ,1 79, ,6 984 P , ,5 80, , , ,8 80, , , ,1 79, , , ,5 78, , P , ,8 78, , , ,2 78, , , ,6 78, , , , P , ,4 77, , , ,8 77, , , , , , ,7 76, , P , ,1 76, , , ,6 75, , , ,1 74, , P , ,6 74, , , ,2 73, , ,8 73, , P , , , , ,3 72, , , ,1 72, , , , P , , DTB2 -B 8-
28 DTB3 GABARIT "PUISSANCE EN FONCTION DE LA VITESSE". P u (W) PUISSANCE UTILE C1 C FREQUENCE DE ROTATION N tr.min -1 -B 9-
29 -B 10- DTB4
30 -B 11- DTB5
31 -B 12- DTB6
32 -B 13- DTB7
33 -B 14- DT B8
34 B.1 ETUDE DE LA MOTORISATION: B.1.1 PUISSANCE MOTEUR. B Puissance aux points caractéristiques. B Gabarit P = f(n). P u (W) C1 C Fréquence : n en tr.min-1 B Synthèse. - DR B1 -
35 B.1.2 COUPLE MOTEUR. B Notion de couple : Formule. Signification des termes. B Relation couple / courants : B Choix du type de moteur : B Analyse du choix constructeur : B Calculer : K t = I = K e = E = - DR B2 -
36 B Synthèse : B Aptitude au freinage : Quadrants de fonctionnement. 0 Aptitude du moteur à assurer le fonctionnement. Sens des tensions et des courants. - DR B3 -
37 B.1.3 ETUDE TECHNOLOGIQUE DU MOTEUR. Nommer et énoncer la fonction des éléments : Photographie A : Photographie B : Photographie C : Photographie D : B.2 CARACTERISER LE MODULATEUR D ENERGIE. B.2.1. ETUDE DES TENSIONS ET COURANTS D INDUIT ET D INDUCTEUR. B.2.1 Valeurs minimales et maximales : U e mini = U e maxi = I e mini = I e maxi = U a mini = U a maxi = I a mini = I a maxi = B.2.2 ETUDE DES HACHEURS : B Valeur moyenne de u e et rapport cyclique de commande : U e = α 2 = B Valeurs de I K2 : I k2 (crête) = I K2 (moyen) = - DR B4 -
38 B Chronogrammes de u e, i e, u k2 et i k2 : (Echelle : 1cm pour 10µs, 1cm pour 5A et 1cm pour 5V) u e (V) i e (A) 0 t (µs) 0 t (µs) u K2 (V) i K2 (A) 0 t (µs) 0 t (µs) Commentaires : - DR B5 -
39 B Choix de K 2 : réf MOS : réf IGBT : B Synthèse : P cond MOS = P cond IGBT = Justification du choix constructeur : B.2.3 FONCTIONNEMENT EN PHASE DE FREINAGE. B Circulation du courant : i b i a i e E D 1 D 2 i b i a i e E D 1 D 2 U K 1 i K D 3 i K K2 U K1 i K D3 i K K2 α T (1 - α) T B Valeur limite de la force électromotrice : - DR B6 -
40 B Vitesse limite de freinage : n mini = V mini = B Synthèse : - DR B7 -
41 OBJECTIF GENERAL DE L'ETUDE Dans cette partie, nous nous attacherons plus particulièrement à : Vérifier l autonomie du scooter. Etudier le fonctionnement et la structure du chargeur embarqué. Justifier le choix du dispositif de protection contre les courts-circuits. C.1 VERIFICATION DE L'AUTONOMIE DU SCOOTER. But de l étude : Vérifier les performances énoncées dans le cahier des charges fonctionnel. On admettra que la batterie conserve des caractéristiques énergétiques lui permettant d'assurer un fonctionnement nominal du scooter jusqu'à 80 % de décharge en mode "normal" et 90 % en mode "économique". On négligera la consommation énergétique à l'arrêt ainsi que l'énergie récupérée lors des phases de freinage. On effectuera tous les calculs à partir des spécifications du cahier des charges fonctionnel et des données d'essai figurant sur le document technique DT C3. C.1.1 DETERMINER, l autonomie du scooter pour un fonctionnement à vitesse maximale C.1.2 DETERMINER l'autonomie du scooter en mode "économique" C.1.3 DETERMINER l'autonomie du scooter en "cycle urbain". C.1.4 Synthèse : COMPARER vos résultats aux performances annoncées par le constructeur. CONCLURE. C.2 ETUDE DE LA CHARGE DE LA BATTERIE. C.21. INDIQUER comment est obtenue la "charge complète" de la batterie avec le chargeur OPT 1400 C. C.2.2 INDIQUER le type de conversion électrique réalisée. PRECISER le symbole de cette conversion. C.2.3 CALCULER la puissance fournie par le chargeur en "charge normale". C.2.4 CALCULER le rendement du chargeur (Voir document technique DT C1 et DT C3). -C 1-
42 C.3 ETUDE DU CHARGEUR EMBARQUE. Le schéma de principe du chargeur embarqué (OPT 1400C) est donné ci-dessous : But de l étude : Analyser le fonctionnement de l alimentation à découpage (zone délimitée en pointillés). Analyser les choix technologiques du constructeur Justifier le choix de cette source. I 0 230V 50Hz REDRESSEUR + FILTRE + CORRECTEUR DE FACTEUR DE PUISSANCE Vc i 1 V1 TR2 K D3 V2 i 2 C3 i S Vs: 21V 50A + - K est un interrupteur parfait. Le transformateur TR2 est caractérisé par L1 et N1 au primaire, L2 et N2 au secondaire. La résistance des enroulements ainsi que les pertes dans le circuit magnétique seront négligées l interrupteur K est fermé durant αt puis ouvert pendant (1-α) T. C.3.1 INDIQUER sur les schémas proposés, l'état (ouvert ou fermé) des interrupteurs K et D3 durant les phases de fonctionnement "αt" et "(1-α) T". C.3.2 ENONCER les relations qui lient V1, V2 à N1, N2 ainsi que la relation des ampères-tours valable à t = αt. C.3.3 TRACER l allure des signaux V1 = f(t) et (N2.i2) = f(t). Le signal (N1.i1) = f(t) est donné. Vous préciserez les valeurs prises par V1 pour les deux intervalles de fonctionnement considérés : 0 < t < αt et αt < t < T puis vous donnerez l expression de i1(t) = f(l1) pour ces mêmes intervalles. Vous rappellerez les états de la diode D3 et de l interrupteur K. C.3.4 INDIQUER la fréquence de hachage du chargeur. PRECISER l intérêt de travailler à cette fréquence pour le dimensionnement du transformateur et du condensateur. JUSTIFIER votre réponse aux plans scientifique et technique. -C 2-
43 C.3.5 Synthèse : Les chargeurs" traditionnels" réalisent le plus souvent la conversion alternatif / continu directement à partir du réseau EDF 230V / 50Hz. A partir des caractéristiques présentés dans la documentation technique DT C1 : COMPARER la puissance massique des deux types de chargeurs proposés. ANALYSER les avantages et les inconvénients de la solution retenue par le constructeur. C.4 ETUDE DE LA PROTECTION CONTRE LES COURT-CIRCUITS. But de l étude : Analyser les caractéristiques électriques de la protection assurée par le fusible F1. Choisir un fusible adapté. La protection générale du circuit électrique est assurée par un «Protistor» FERRAZ. La constante de temps du circuit (L/R) est égale à 45 ms. A partir des caractéristiques techniques du scoot'élec (type d'alimentation, nature des circuits à protéger, contrainte thermique, etc.) et des informations contenues dans la documentation technique FERRAZ (pages C7 à C13). C.4.1 PRECISER l'intérêt de ce type de fusible pour la protection du circuit considéré. C.4.2 PRECISER le calibre requis en intensité C.4.3 PROPOSER les références d'un fusible DC et d'un fusible AC adaptés à la protection à réaliser. JUSTIFIER vos réponses. -C 3-
44 DT C1 CHARGEUR OPT 1400 C CARACTERISTIQUES D ENTREE : CARACTERISTIQUES ELECTRIQUES : Tension d alimentation : 230 V 50 Hz Puissance : 1400 W Courant absorbé nominal : 6,5 A cos ϕ = 1 Courant absorbé maximal : 7 A cos ϕ = 1 Courant d appel : 120 A 4 ms CARACTERISTIQUES DE SORTIE : Tension de sortie maximale : 26 V Courant de charge : 50 A DC Ondulation à 50A : 2,5 A Courant d'égalisation : 5 A DC Courant de maintien : 0,1 A DC Chargeur ventilé, boîtier aluminium brut. CARACTERISTIQUES GEOMETRIQUES Encombrement du boîtier : Encombrement hors tout typique : Poids : mm mm 2 kg CHARGEUR TRADITIONNEL CARACTERISTIQUES ELECTRIQUES : Tension d alimentation : 230 V 50 Hz Puissance : 350 W Tension de sortie : 12 V Courant de charge normal : 9 A DC Courant de charge rapide : 17 A DC CARACTERISTIQUES GEOMETRIQUES : Encombrement du boîtier : Poids : mm 4 kg -C 4-
45 DT C2 CHARGEUR OPT 1400 C Alimentation : 230V / 7A Puissance : 1400 W Charge normale : 50A / 2heures Charge d'égalisation : 5A / 3 heures taux de surcharge : 15 % FILTRE + Correcteur de facteur de puissance HACHEUR 100 khz Transformateur d isolement REDRESSEUR + FILTRAGE Sortie batterie 50A/21V Contrôle De régulation Gestion Commande PWM UCE O/U Bat. SCHEMA SYNOPTIQUE -C 5-
46 DT C3 CARACTERISTIQUE DE CHARGE DES BATTERIES Tension batterie (V) 25 V 21V Temps (heure) 50 Courant batterie (A) Temps (heure) RELEVE D'ESSAI DU SCOOTER CONDITIONS D'ESSAI : Charge nominale : Vitesse du vent : 80 kg 0 km/h Phase de fonctionnement Pente Courant batterie (%) (A) I = f (V) V = 0,5 km/h stabilisée 0 15 V = 45 km/h stabilisée 0 80 V = 30 km/h stabilisée 0 44 V = 34 km/h stabilisée I = f (accélération) Accélération = 1m.s * Accélération = 1,5m.s * Accélération maximale * Accélération maximale * * Valeur moyenne déterminée sur la durée de l accélération. -C 6-
47 Les fusibles PROTISTOR pour les semi-conducteurs de puissance Les fusibles PROTISTOR sont la réponse, reconnue par le marché, aux problèmes de protection posés par les semi-conducteurs dans les équipements de l'électronique de puissance. Les plus produit technologie sans cesse améliorée performances électriques exceptionnelles encombrements réduits allégement des masses très large gamme d'appareillage associé Bénéfices utilisateur assurance d'une protection électrique optimale fiabilité de la protection conception des équipements facilitée montage aisé maintenace allégée gamme fusibles PROTISTOR = Interchangeabilité assurée La présence de tous les standards mondiaux de fusibles pour la protection des semi-conducteurs de puissance est la réponse de FERRAZ aux demandes d'interchangeabilité. français Standard européen allemand anglais Standard américain 99 38
48 C.1 VERIFICATION DE L'AUTONOMIE DU SCOOTER. C.1.1 Autonomie du scooter à vitesse maximale. C.1.2 Autonomie du scooter en mode économique. C.1.3 Autonomie du scooter en cycle urbain C.1.4 Synthèse. C.2 ETUDE DE LA CHARGE DE LA BATTERIE. C.2.1 Charge complète de la batterie. C.2.2 Type et symbole de la conversion électrique. C.2.3 Puissance fournie par le chargeur. C.2.4 Rendement du chargeur. -DR C1-
49 C.3 ETUDE DU CHARGEUR EMBARQUE. C.3.1 Compléter le schéma. Ve V1 i 1 TR2 V2 i 2 C3 + Vs Ve V1 i 1 TR2 V2 i 2 C3 + Vs K - K - αt (1-α)T C.3.2 Enoncé des relations. C.3.3 Tracer l'allure des signaux. V1 0 < t < αt et αt < t < T t D3 αt T K V1 = N1.i1 N2.i2 N1.I1 M i1 = i2 = t αt T -DR C2-
50 C.3.4 Fréquence de hachage. Influence sur le dimensionnement du transformateur et du condensateur: Justification : C.3.5 Synthèse. Puissance massique d'un chargeur traditionnel : Puissance massique du chargeur OPT 1400C : Avantages et inconvénients de la solution constructeur : C.4 PROTECTION CONTRE LES COURT-CIRCUITS. C.4.1 Intérêt du "PROTISTOR": C.4.2 Calibre en intensité : C.4.3 Référence des fusibles : Fusible DC : Justification : Fusible AC : Justification : -DR C3-
51 TRAITEMENT DES DONNEES L'Unité de Commande Electronique concentre toute l'intelligence du scooter. Elle contrôle le courant dans les circuits de puissance, règle en permanence le point de fonctionnement du moteur et gère la récupération de l'énergie lorsque le pilote décélère. Elle gère l'ensemble des fonctions de communication entre l'homme et la machine (sécurité antivol, éclairage, signalisation, indicateur de charge), Elle contrôle en permanence le bon fonctionnement du scooter (détection des anomalies, analyse et mémorisation des défauts). Pour piloter ces fonctions, l'unité centrale réalise un traitement logiciel de l'ensemble des informations en provenance des différents capteurs. (voir figure D0.-1). Schéma structurel d'ensemble Figure D0-1 - D 1 -
52 On se propose d'étudier plus particulièrement l'acquisition et le traitement des informations "courant batterie" et "commande vitesse" ainsi que le filtrage qui leur est associé. Le signal électrique en provenance de chaque capteur fait l'objet d'une adaptation et d'une mise en forme. Il subit ensuite une conversion analogique / numérique à l'entrée du microcontrôleur. La figure D0-2 présente le schéma synoptique global du traitement des données. La figure D0-3 présente les structures électroniques qui réalisent l'adaptation et la mise en forme des signaux avant conversion analogique / numérique. Intensité batterie IB Unité de Commande Electronique CAPTAGE CONVERSION I U Vc MISE EN FORME Vib FILTRAGE Vibo CONVERSION ANALOGIQUE NUMÉRIQUE Microcontrôleur N Charge de la batterie ANGLE ROTATION POIGNÉE CONVERSION ANALOGIQUE NUMÉRIQUE TRAITEMENT NUMÉRIQUE P Commande des hacheurs Commande du chargeur Vpo CONVERSION ROTATION TENSION PROTECTION Vp FILTRAGE Synoptique de l'acquisition et du traitement des données Figure D0-2 Acquisition du courant batterie : La tension fournie par le capteur est une mise en forme puis filtrée. Le nombre N est l'image numérique du courant batterie IB Commande de vitesse : La commande de vitesse est obtenue par rotation de la poignée accélératrice. Une structure spécifique assure la protection de l'équipement et la sécurité du conducteur en cas de défaillance du système. La tension Vp et le nombre P sont les images analogique et numérique de l'angle de rotation alpha de la poignée. Filtrage: La grandeur électrique fournie par chaque capteur est susceptible d'être brouillée par des perturbations parasites provenant des hacheurs et conduites par les alimentations. Pour éliminer ces perturbations le constructeur a installé un filtrage sur chaque chaîne d'acquisition. - D 2 -
53 Schéma structurel Figure D0-3 D.1 ACQUISITION DU COURANT BATTERIE L'acquisition de la grandeur courant batterie intervient, entre autre, dans la commande des hacheurs d'induit et d'inducteur, l'affichage de l'énergie disponible, la gestion du freinage et du chargeur. Le courant de batterie varie de - 50A lors de la charge à + 300A dans certaines phases de fonctionnement du moteur. Objectifs de l'étude : étudier le sous système de traitement de la donnée "courant de batterie" afin d'établir la relation qui associe ce courant IB à son image numérique N, analyser la structure électronique réalisant la mise en forme. déterminer la fonction de transfert. - D 3 -
54 Intensité batterie IB CAPTAGE CONVERSION I U CONVERSION MISE EN FORME ANALOGIQUE Vc Vib N NUMERIQUE Microcontrôleur TRAITEMENT NUMÉRIQUE État de charge de la batterie Commande des hacheurs Commande du chargeur Unité de Commande Electronique Conversion courant / tension : Le capteur (Référence AC2F voir document technique DT D1) fournit une tension V c de la forme : V c = S.IB + E/2 S = sensibilité du capteur E = tension d'alimentation = 12V Mise en forme La fonction mise en forme, réalisée à l'aide d'un amplificateur linéaire intégré établit la relation : V ib = - 1,15 V c + 11,2 Conversion analogique / numérique Le convertisseur, intégré au microcontrôleur, fournit le nombre binaire N au format (n) de 8 bits. La fonction de transfert du convertisseur analogique numérique est de la forme : N = (2 n 1) (V ib /V ref ) n = 8 et V ref = 5 V pour 0 < V ib < 5 V D.1.1 ORGANISATION FONCTIONNELLE Objectif de l'étude : Établir la relation qui associe le courant IB à son image numérique N à partir de la définition de chacun des blocs de la chaîne d'acquisition. Démontrer que cette relation est linéaire. D Relation tension V ib fonction du courant batterie IB ÉTABLIR les relations numériques associant les tensions V c et V ib au courant batterie IB. TRACER les courbes représentatives des variations de V c et de V ib en fonction de IB. D Relation nombre N fonction du courant batterie IB ÉTABLIR la relation numérique associant le nombre N au courant batterie IB. COMPLÉTER le tableau associant le courant batterie IB à son image numérique N ( en décimal et en binaire ). CONCLURE l'étude fonctionnelle du sous système de traitement de la donnée "courant batterie" en montrant que la relation qui associe la valeur du courant IB au nombre binaire N est une relation linéaire. - D 4 -
55 D.1.2 MISE EN FORME Objectif de l'étude : Valider la structure d'adaptation en tension. Le convertisseur analogique numérique intégré au microcontrôleur a une gamme de tension d'entrée comprise entre 0 et + 5V. Pour réaliser son alimentation à partir de la tension disponible sur le scooter, le constructeur utilise la structure ci-dessous. ÉTABLIR la relation associant la tension V ib à la tension V c fournie par le capteur en fonction de R3, R4 et V +. (V+ est le potentiel de la borne 3 de l'amplificateur linéaire intégré.) CALCULER V ib et COMPARER le résultat à l'expression proposée au D.1.1 D.2 ACQUISITION DE LA COMMANDE "VITESSE" La rotation de la poignée accélératrice du scooter agit sur un potentiomètre (figure D2-1). La tension issue du curseur, représentative de l'angle de rotation de la poignée est traitée, après conversion analogique / numérique, par l'unité de commande électronique. Des résistances additionnelles permettent d'assurer la protection de et la sécurité de l'utilisateur en cas de coupure de fil ou de connexion erronée. - D 5 -
56 Objectifs de l'étude : Analyser le principe d'acquisition de la commande en vitesse, Démontrer que la structure retenue permet la détection d'une coupure entre la poignée et l'unité de commande électronique. figure D2-1 D.2.1 PRINCIPE D'ACQUISITION Objectif de l'étude : Établir la relation qui associe le coefficient de rotation α de la poignée à la tension V P. Tracer la caractéristique correspondante. D Relation tension V p / rotation α Le schéma de la structure de mise en forme est donné ci-dessous. On appelle αp la partie du potentiomètre comprise entre les points A et C. On considère que le courant dans le curseur est négligeable figure D2-2 ÉTABLIR l'expression littérale de V p en fonction de R1, R2, αp et E. D Variation de la tension en fonction de l'angle de rotation TRACER la courbe V p = f (α) pour 0 < α < 1. PRÉCISER, dans un fonctionnement "normal", l'intervalle (V1 ; V2) de variation de la tension V p. - D 6 -
57 D.2.2 DETECTION D'UNE COUPURE DE LIAISON ELECTRIQUE. Objectif de l'étude: Démontrer que la structure retenue permet la détection d'une coupure de liaison. D Coupure au point C. DÉTERMINER, dans le cas ou le potentiomètre est placé à mi-course (α=0,5), la valeur V p1 de la tension V p. D Coupure au point A DÉTERMINER, dans ce cas la valeur V p2 de la tension V p (utiliser le schéma de la figure D2-1) D Détection d'un défaut de liaison REPORTER, sur l'axe proposé, les valeurs V 1, V 2, V P1, V P2. HACHURER la zone de fonctionnement "normal" du scooter. CONCLURE sur l'aptitude de la structure à détecter un défaut. D.3 FILTRAGE L'ensemble des informations électriques traitées par l'uce sont susceptibles d'être perturbées par la présence de parasites conduits ou rayonnés. Ces perturbations, principalement liées à la présence des hacheurs d'induit et d'inducteur, ont des fréquences supérieures à quelques dizaines de kilo - hertz. Pour éliminer ces perturbations le constructeur à systématisé la mise en place d'un filtre RC (10 kω, 100 nf) sur chacune des entrées de l'uce (voir les figures D0-2 et D0-3). Objectifs de l'étude : Identifier le type de filtre utilisé, Caractériser l'efficacité du filtre vis à vis de la fréquence fondamentale du hacheur d'induit. D.3.1 EXPRESSION DE LA TRANSMITTANCE DU FILTRE figure D3-1 On appelle transmittance T (ou fonction de transfert dynamique) le rapport des nombres complexes associés aux grandeurs sinusoïdales d'entrées et de sorties. ÉTABLIR l'expression de cette transmittance sous la forme : T = S 1 = E 1+ j f f 0 PRÉCISER l'expression et la valeur de la fréquence de coupure f 0. - D 7 -
58 D.3.2 MODULE DE LA TRANSMITTANCE FONCTION DE LA FREQUENCE ÉTABLIR l'expression du module de la transmittance T en fonction de f et f 0. RÉALISER l'application numérique en complétant le tableau de valeurs proposé. TRACER l'allure de la courbe correspondante. IDENTIFIER, à l'aide de cette courbe le type du filtre réalisé. D.3.3 EFFICACITE DU FILTRE L'efficacité du filtre vis à vis d'une fréquence perturbatrice est caractérisée par la valeur du module de T (exprimée en %). La fréquence fondamentale du hacheur d'induit est de 20kHz. DÉTERMINER l'efficacité du filtre vis à vis des perturbations provoquées par le hacheur d'induit en calculant la valeur T 20 du module de T pour cette fréquence. PRÉCISER l'amplitude S résiduelle à la sortie du filtre si l'amplitude perturbatrice E est égale à 0,1V à 20kHz - D 8 -
59 -DT D1- CAPTEUR DE COURANT LINÉAIRE Conversion courant - tension Le transducteur est constitué d'un circuit magnétique, du capteur (à effet Hall) placé dans un entrefer et d'un sous ensemble électronique. Le câble (parcouru par l'intensité à mesurer ) est logé au centre du circuit magnétique dans un trou qui peut être circulaire ou rectangulaire. L'ensemble permet d'obtenir une variation de tension proportionnelle à l'intensité du courant à mesurer (courant continu ou variable) Un capteur est défini principalement par : son calibre (intensité maximale pouvant être mesurée) sa sensibilité (rapport tension de sortie courant à mesurer en mv/a) sa tension d'alimentation sa tension de sortie au repos Calibre : 300A CAPTEUR A2CF MICRO SWITCH Sensibilité S = 12,5 mv/a (Alimentation 12V) Alimentation entre broches 1 et 3 Vcc de 6 à 12 V Tension de repos Vcc / 2 Température d'utilisation de - 25 à + 85 C - D 9 -
60 D Relation tension Vib fonction du courant batterie IB Vc et Vib en fonction de Ib Vib Vc Vc(V) et Vib(V) Courant batterie Ib(A) D Relation nombre N - courant batterie IB IB (A) N décimal N binaire - DR D1 -
61 D (suite) Relation linéaire D.1.2 Mise en forme D Vp en fonction de R1, R2, ap et E D Courbe Tension Vp = f (a) VP(V) ,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 ALPHA -DR D 2 -
62 D Valeur de Vp1. D Valeur de Vp2. D Détection d'un défaut de liaison 0 5 Vp(V) D.3.1 Expression de la transmittance du filtre D.3.2 Module de la transmittance fonction de la fréquence Fréquence Hz Module de T k 100k -DR D 3 -
63 Module de T 1,2 1 0,8 0,6 0,4 0, Fréquence en Hz D.3.2 (Suite) type du filtre : D.3.3 Efficacité du filtre D.3.3 (suite) amplitude S résiduelle à la sortie du filtre. -DR D 4 -
64 -DR D 5 -
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Eléments constitutifs et synthèse des convertisseurs statiques. Convertisseur statique CVS. K à séquences convenables. Source d'entrée S1
 1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Système de contrôle TS 970
 Système de contrôle TS 970 Le système de contrôle TS 970 est fourni de manière standard. Ce système de contrôle est préparé à accueillir différents éléments de commande. Spécifications techniques du système
Système de contrôle TS 970 Le système de contrôle TS 970 est fourni de manière standard. Ce système de contrôle est préparé à accueillir différents éléments de commande. Spécifications techniques du système
Aperçu. S35 Franchir les escaliers en toute sécurité.
 Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
NO-BREAK KS. Système UPS dynamique PRÉSENTATION
 NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
Actionneur d'ouvre portail
 Actionneur d'ouvre portail Non présent sur le système pédagogique Portail en position A "Fusible" Redresseur Relais Moteur asynchrone monophasé, Pompe hydraulique à engrenage, Vérin hydraulique double
Actionneur d'ouvre portail Non présent sur le système pédagogique Portail en position A "Fusible" Redresseur Relais Moteur asynchrone monophasé, Pompe hydraulique à engrenage, Vérin hydraulique double
Système ASC unitaire triphasé. PowerScale 10 50 kva Maximisez votre disponibilité avec PowerScale
 Système ASC unitaire triphasé 10 50 kva Maximisez votre disponibilité avec Protection de première qualité est un système ASC triphasé de taille moyenne qui offre une protection électrique remarquable pour
Système ASC unitaire triphasé 10 50 kva Maximisez votre disponibilité avec Protection de première qualité est un système ASC triphasé de taille moyenne qui offre une protection électrique remarquable pour
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Informations produits scalamobil S35 scalacombi S36
 Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension
 Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension Cyril BUTTAY CEGELY VALEO 30 novembre 2004 Cyril BUTTAY Contribution à la conception
Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension Cyril BUTTAY CEGELY VALEO 30 novembre 2004 Cyril BUTTAY Contribution à la conception
Version MOVITRANS 04/2004. Description 1121 3027 / FR
 MOVITRANS Version 04/2004 Description 1121 3027 / FR SEW-USOCOME 1 Introduction... 4 1.1 Qu est-ce-que le MOVITRANS?... 4 1.2 Domaines d utilisation du MOVITRANS... 4 1.3 Principe de fonctionnement...
MOVITRANS Version 04/2004 Description 1121 3027 / FR SEW-USOCOME 1 Introduction... 4 1.1 Qu est-ce-que le MOVITRANS?... 4 1.2 Domaines d utilisation du MOVITRANS... 4 1.3 Principe de fonctionnement...
1. Les différents types de postes de livraison On peut classer les postes HTA/BT en deux catégories.
 2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
MH 20/25-4 T. Buggie. Capacité 2000 kg et 2500 kg. Hauteur hors tout : moins de 2 mètres. Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw
 MH 20/25-4 T Buggie Capacité 2000 kg et 2500 kg Hauteur hors tout : moins de 2 mètres Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw Transmission hydrostatique MH 20/MH 25-4 T Buggie, les Déja novateur
MH 20/25-4 T Buggie Capacité 2000 kg et 2500 kg Hauteur hors tout : moins de 2 mètres Moteur Turbo Kubota 4 cylindres : 60 cv/44 kw Transmission hydrostatique MH 20/MH 25-4 T Buggie, les Déja novateur
Distributeur de carburant GPL
 BACCALAUREAT GENERAL Session 2002 Série S Sciences de l Ingénieur ETUDE D UN SYSTEME PLURITECHNIQUE Coefficient : 6 Durée de l épreuve : 4 heures Sont autorisés les calculatrices électroniques et le matériel
BACCALAUREAT GENERAL Session 2002 Série S Sciences de l Ingénieur ETUDE D UN SYSTEME PLURITECHNIQUE Coefficient : 6 Durée de l épreuve : 4 heures Sont autorisés les calculatrices électroniques et le matériel
Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE. www.altoproaudio.com Version 1.0 Juillet 2003 Français
 Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE www.altoproaudio.com Version 1.0 Juillet 2003 Français SOMMAIRE 1. INTRODUCTION................................................................... 4 2. FONCTIONNALITÉS................................................................
Mode d emploi ALTO MONITOR PROCESSEUR D ÉCOUTE www.altoproaudio.com Version 1.0 Juillet 2003 Français SOMMAIRE 1. INTRODUCTION................................................................... 4 2. FONCTIONNALITÉS................................................................
F = B * I * L. Force en Newtons Induction magnétique en teslas Intensité dans le conducteur en ampères Longueur du conducteur en mètres
 LE M O TE U R A C O U R A N T C O N TI N U La loi de LAPLACE Un conducteur traversé par un courant et placé dans un champ magnétique est soumis à une force dont le sens est déterminée par la règle des
LE M O TE U R A C O U R A N T C O N TI N U La loi de LAPLACE Un conducteur traversé par un courant et placé dans un champ magnétique est soumis à une force dont le sens est déterminée par la règle des
PRINCIPE, REGULATION et RECHERCHE de PANNES
 NOTICE TECHNIQUE N 003 Date : 08/04/03 Révisé le: 14/09/07 ALTERNATEUR PRINCIPE, REGULATION et RECHERCHE de PANNES 1 ) Principe : Contrairement à la dynamo qui produit du courant alternatif redressé par
NOTICE TECHNIQUE N 003 Date : 08/04/03 Révisé le: 14/09/07 ALTERNATEUR PRINCIPE, REGULATION et RECHERCHE de PANNES 1 ) Principe : Contrairement à la dynamo qui produit du courant alternatif redressé par
Solutions pour la mesure. de courant et d énergie
 Solutions pour la mesure de courant et d énergie Mesure et analyse de signal Solutions WAGO pour la surveillance et l économie d énergie Boucles de mesure Rogowski, série 855 pour la mesure non intrusive
Solutions pour la mesure de courant et d énergie Mesure et analyse de signal Solutions WAGO pour la surveillance et l économie d énergie Boucles de mesure Rogowski, série 855 pour la mesure non intrusive
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
CONCOURS GÉNÉRAL DES LYCÉES Session 2014. Durée 5 heures. Corrigé. Poséidon au secours d Éole pour produire l énergie électrique
 CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
CONVERTISSEURS NA ET AN
 Convertisseurs numériques analogiques (xo Convertisseurs.doc) 1 CONVTIU NA T AN NOT PLIMINAI: Tous les résultats seront exprimés sous formes littérales et encadrées avant les applications numériques. Les
Convertisseurs numériques analogiques (xo Convertisseurs.doc) 1 CONVTIU NA T AN NOT PLIMINAI: Tous les résultats seront exprimés sous formes littérales et encadrées avant les applications numériques. Les
1 point de pénalité par réponse fausse si plusieurs réponses requises 1/2 point de pénalité par réponse manquante
 QUESTIONS ODE DE L ROUTE attention certaines questions comportent plusieurs réponses 1 point de pénalité par réponse fausse si plusieurs réponses requises 1/2 point de pénalité par réponse manquante 1
QUESTIONS ODE DE L ROUTE attention certaines questions comportent plusieurs réponses 1 point de pénalité par réponse fausse si plusieurs réponses requises 1/2 point de pénalité par réponse manquante 1
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Convertisseurs statiques d'énergie électrique
 Convertisseurs statiques d'énergie électrique I. Pourquoi des convertisseurs d'énergie électrique? L'énergie électrique utilisée dans l'industrie et chez les particuliers provient principalement du réseau
Convertisseurs statiques d'énergie électrique I. Pourquoi des convertisseurs d'énergie électrique? L'énergie électrique utilisée dans l'industrie et chez les particuliers provient principalement du réseau
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
Introduction à l électronique de puissance Synthèse des convertisseurs statiques. Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER
 Introduction à l électronique de puissance Synthèse des convertisseurs statiques Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER 28 janvier 2007 Table des matières 1 Synthèse des convertisseurs
Introduction à l électronique de puissance Synthèse des convertisseurs statiques Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER 28 janvier 2007 Table des matières 1 Synthèse des convertisseurs
III Capteurs et actuateurs
 III Capteurs et actuateurs Tous les systèmes électroniques ont en commun qu ils fonctionnent selon le principe ETS (Entrée, Traitement, Sortie) du traitement de l information. ENTRÉE TRAITEMENT SORTIE
III Capteurs et actuateurs Tous les systèmes électroniques ont en commun qu ils fonctionnent selon le principe ETS (Entrée, Traitement, Sortie) du traitement de l information. ENTRÉE TRAITEMENT SORTIE
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Les schémas électriques normalisés
 On distingue 4 types de schémas I)- Schéma développé : Les schémas électriques normalisés C'est le schéma qui permet de comprendre facilement le fonctionnement d'une installation électrique. Il ne tient
On distingue 4 types de schémas I)- Schéma développé : Les schémas électriques normalisés C'est le schéma qui permet de comprendre facilement le fonctionnement d'une installation électrique. Il ne tient
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P
 Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
H E L I O S - S T E N H Y
 Générateurs Electriques Hybrides 100% prêts à l'emploi H E L I O S - S T E N H Y E C O - U P S - SI & H E L I O S - P A D - 2 5 0 - SC- 24 H E L I O S - S P V - 6 E T 9 Modèles présentés: HELIOS-STENHY-SI-3000-220-..+HELIOS-PAD-750-SR-48
Générateurs Electriques Hybrides 100% prêts à l'emploi H E L I O S - S T E N H Y E C O - U P S - SI & H E L I O S - P A D - 2 5 0 - SC- 24 H E L I O S - S P V - 6 E T 9 Modèles présentés: HELIOS-STENHY-SI-3000-220-..+HELIOS-PAD-750-SR-48
LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES ETUDE D UN TRAITEMENT DE SURFACE
 TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
DISPOSITIF DE BLOCAGE STATIQUE Ø 32 à 100 mm - double effet ISO 15552
 DISPOSITIF DE BLOCAGE STATIQUE Ø 3 à 100 mm - double effet ISO 1555 Séries 53-50 9 PRESENTATION Il est destiné à assurer le maintien et le blocage en position extrême de la tige du vérin sous charge lors
DISPOSITIF DE BLOCAGE STATIQUE Ø 3 à 100 mm - double effet ISO 1555 Séries 53-50 9 PRESENTATION Il est destiné à assurer le maintien et le blocage en position extrême de la tige du vérin sous charge lors
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN)
") 1/5 Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN) Objectifs : Reconnaître des signaux de nature analogique et des signaux de nature numérique Mettre en
1/5 Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN) Objectifs : Reconnaître des signaux de nature analogique et des signaux de nature numérique Mettre en
BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE SUJET
 SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
En avant! FJR1300A www.yamaha-motor.fr
 1300A En avant! Au cours des dix dernières années, cette moto extrêmement fiable a permis à des milliers d'utilisateurs de profiter de performances supersport et d'un exceptionnel confort pour le conducteur
1300A En avant! Au cours des dix dernières années, cette moto extrêmement fiable a permis à des milliers d'utilisateurs de profiter de performances supersport et d'un exceptionnel confort pour le conducteur
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
E/ECE/324/Rev.1/Add.12/Rev.7/Amend.4 E/ECE/TRANS/505/Rev.1/Add.12/Rev.7/Amend.4
 6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
CHARGE ACTIVE. Banc d'essais de machines tournantes. Notice d'instruction. Cette notice doit être transmise. à l'utilisateur final
 4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
MEMOIRES MAGNETIQUES A DISQUES RIGIDES
 MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
CIRCUIT DE CHARGE BOSCH
 LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
MANUEL D UTILISATION EASY 12
 MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
CH 11: PUIssance et Énergie électrique
 Objectifs: CH 11: PUssance et Énergie électrique Les exercices Tests ou " Vérifie tes connaissances " de chaque chapitre sont à faire sur le cahier de brouillon pendant toute l année. Tous les schémas
Objectifs: CH 11: PUssance et Énergie électrique Les exercices Tests ou " Vérifie tes connaissances " de chaque chapitre sont à faire sur le cahier de brouillon pendant toute l année. Tous les schémas
Alimentations. 9/2 Introduction
 Alimentations / Introduction / Alimentations non stabilisées AV filtrées, pour l alimentation de commandes électroniques / Généralités / Alimentations AV, AV filtrées, monophasées / Présentation / Tableau
Alimentations / Introduction / Alimentations non stabilisées AV filtrées, pour l alimentation de commandes électroniques / Généralités / Alimentations AV, AV filtrées, monophasées / Présentation / Tableau
Notions fondamentales sur le démarrage des moteurs
 Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
FIRE CONTROL VENTOUSES ÉLECTROMAGNÉTIQUES
 fire control 31 32 FIRE CONTROL VENTOUSES ÉLECTROMAGNÉTIQUES 01620 01620I 01630 01630I 01820 01820I 01830 01830I Ventouse électromagnétique Corps ventouse à dos fileté M8 Dimensions ventouse : diamètre
fire control 31 32 FIRE CONTROL VENTOUSES ÉLECTROMAGNÉTIQUES 01620 01620I 01630 01630I 01820 01820I 01830 01830I Ventouse électromagnétique Corps ventouse à dos fileté M8 Dimensions ventouse : diamètre
Numérisation du signal
 Chapitre 12 Sciences Physiques - BTS Numérisation du signal 1 Analogique - Numérique. 1.1 Définitions. Signal analogique : un signal analogique s a (t)est un signal continu dont la valeur varie en fonction
Chapitre 12 Sciences Physiques - BTS Numérisation du signal 1 Analogique - Numérique. 1.1 Définitions. Signal analogique : un signal analogique s a (t)est un signal continu dont la valeur varie en fonction
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
GLOSSAIRE A L USAGE DU FORMATEUR DE CONDUITE TOUT-TERRAIN
 GLOSSAIRE A L USAGE DU FORMATEUR DE CONDUITE TOUT-TERRAIN Auteurs Comité pédagogique «COD 3» de l ECASC Glossaire «Formateur de conduite tout terrain» A Angle d attaque : Angle formé par le sol, le point
GLOSSAIRE A L USAGE DU FORMATEUR DE CONDUITE TOUT-TERRAIN Auteurs Comité pédagogique «COD 3» de l ECASC Glossaire «Formateur de conduite tout terrain» A Angle d attaque : Angle formé par le sol, le point
0 20mV; 0 40mV; 0 80mV; 0 160mV; 0 320mV; 0 640mV; 0 1,28V; 0 2,56V 0 5V; 0 10V
 ITM carte d entrèes analogues INTERFACES DE PROCES La carte ITM a 8 isolées entrées analogiques, chaque canal a un 16 bit A/N convertisseurs, avec une haute stabilité et une très haute rapport de réjection
ITM carte d entrèes analogues INTERFACES DE PROCES La carte ITM a 8 isolées entrées analogiques, chaque canal a un 16 bit A/N convertisseurs, avec une haute stabilité et une très haute rapport de réjection
Multitension Monofonction. Multitension Multifonction
 Série - Relais temporisés modulaires 16 A SERIE Caractéristiques.01.11 Relais temporisés multifonction et monofonction.01 - Multifonction et multitension.11 - Temporisé à la mise sous tension, multitension
Série - Relais temporisés modulaires 16 A SERIE Caractéristiques.01.11 Relais temporisés multifonction et monofonction.01 - Multifonction et multitension.11 - Temporisé à la mise sous tension, multitension
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
BD 302 MINI. Etage de puissance pas à pas en mode bipolaire. Manuel 2059-A003 F
 BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F phytron BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F Manuel BD 302 MINI 2002 Tous droits
BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F phytron BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F Manuel BD 302 MINI 2002 Tous droits
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIQUE : ÉLÉMENTS DE CORRIGÉ. Partie A : alimentation HTA
 ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
CLIP. (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant
 Appareil autonome affichant le numéro appelant") 1. Besoin CLIP (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant ETUDE FONCTIONNELLE De très nombreux abonnés du réseau téléphonique commuté ont exprimé le besoin
1. Besoin CLIP (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant ETUDE FONCTIONNELLE De très nombreux abonnés du réseau téléphonique commuté ont exprimé le besoin
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
Jouve, 18, rue Saint-Denis, 75001 PARIS
 19 à Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 645 740 A1 12 DEMANDE DE BREVET EUROPEEN @ Numéro de dépôt : 94402079.1 @ Int. ci.6: G07B 17/04,
19 à Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 645 740 A1 12 DEMANDE DE BREVET EUROPEEN @ Numéro de dépôt : 94402079.1 @ Int. ci.6: G07B 17/04,
Kits de solutions conformes aux normes pour station de recharge
 Kits de solutions conformes aux normes pour station de recharge s, interrupteurs, appareils de mesure et de surveillance Les garages et les parkings doivent être dotés de stations de recharge (EVSE) pour
Kits de solutions conformes aux normes pour station de recharge s, interrupteurs, appareils de mesure et de surveillance Les garages et les parkings doivent être dotés de stations de recharge (EVSE) pour
Les résistances de point neutre
 Les résistances de point neutre Lorsque l on souhaite limiter fortement le courant dans le neutre du réseau, on utilise une résistance de point neutre. Les risques de résonance parallèle ou série sont
Les résistances de point neutre Lorsque l on souhaite limiter fortement le courant dans le neutre du réseau, on utilise une résistance de point neutre. Les risques de résonance parallèle ou série sont
Catalogue de machines. CNC-Carolo. Edition de juillet 2011
 Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
27/31 Rue d Arras 92000 NANTERRE Tél. 33.(0)1.47.86.11.15 Fax. 33.(0)1.47.84.83.67
1.47.86.11.15 Fax. 33.(0)1.47.84.83.67") Caractéristiques standards MODELE Puissance secours @ 50Hz Puissance prime @ 50Hz Moteur (MTU, 16V4000G61E ) Démarrage électrique, alternateur de charge 24 V, régulation Elec Alternateur (LEROY SOMER,
Caractéristiques standards MODELE Puissance secours @ 50Hz Puissance prime @ 50Hz Moteur (MTU, 16V4000G61E ) Démarrage électrique, alternateur de charge 24 V, régulation Elec Alternateur (LEROY SOMER,
7200S FRA. Contacteur Statique. Manuel Utilisateur. Contrôle 2 phases
 7200S Contacteur Statique FRA Contrôle 2 phases Manuel Utilisateur Chapitre 2 2. INSTALLATI Sommaire Page 2.1. Sécurité lors de l installation...............................2-2 2.2. Montage.................................................2-3
7200S Contacteur Statique FRA Contrôle 2 phases Manuel Utilisateur Chapitre 2 2. INSTALLATI Sommaire Page 2.1. Sécurité lors de l installation...............................2-2 2.2. Montage.................................................2-3
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,