Le Robot Caméléon. Lycée Louis-Le-Grand. JACQUIN Aymeric. LAZARD Benjamin. RAKOTOMALALA Adrielle 1 / 16
|
|
|
- Marie-Hélène Beauchamp
- il y a 8 ans
- Total affichages :
Transcription
1 Le Robot Caméléon Lycée Louis-Le-Grand JACQUIN Aymeric LAZARD Benjamin RAKOTOMALALA Adrielle 1 / 16

2 Introduction Les animaux, qui ont souvent plusieurs prédateurs naturels, ont au cours de l évolution développé de nombreuses techniques de camouflage. L une d entre elles consiste en un changement dynamique de leur couleur. Plusieurs espèces ont cette capacité, dont l exemple le plus connu est le caméléon. Le camouflage est également un enjeu important pour l homme. N'avez-vous jamais rêvé de pouvoir vous fondre dans le décor? En effet, même si l homme n a pas de prédateur naturel, la nécessité de se camoufler dans l environnement pour échapper aux ennemis est apparue évidente durant les conflits qui ont émaillé l histoire. Le camouflage est donc non seulement un enjeu militaire mais aussi une nécessité dans toutes les activités où l homme souhaite évoluer dans la nature sans être vu (chasse, photographie animalière ). Nous avons donc choisi d étudier les capacités du caméléon afin de mettre au point une application utile à l homme : produire un robot capable de se fondre dans son environnement. La problématique de notre travail a donc été : comment un robot peut-il se fondre dans la nature en s inspirant des techniques de camouflage du caméléon? Afin de se dissimuler dans son environnement, le caméléon provoque un changement dynamique de sa couleur de peau. La coloration du caméléon est principalement due aux chromatophores, des cellules de peau contenant des pigments colorés. Pour changer de couleur, celui-ci sécrète une hormone provoquant la contraction de petits muscles qui déforment les cellules pigmentaires, modifiant ainsi la répartition des pigments à l intérieur des chromatophores. 2 / 16

3 Conceptualisation du robot En nous inspirant de l exemple du caméléon, nous avons donc défini la fonction principale de notre robot : se camoufler dans son environnement. A partir de cette fonction principale, nous avons ensuite déterminé les différentes fonctions que notre robot se devait de remplir. Nous avons rassemblé toutes ces fonctions dans le diagramme FAST suivant, qui mentionne également les solutions technologiques que nous avons apportées. 3 / 16

4 Par la suite, nous avons établi le cahier des charges fonctionnel du robot : Fonctions de service Critères d appréciation Capture de la couleur du sol Niveaux d acceptation Distinguer au minimum 100 couleurs différentes Tolérance ± 20 couleurs FS1: Reproduire la couleur du sol FS2 : Se déplacer selon les ordres de l utilisateur FS3 : Être autonome en énergie C1 : Ne pas être visible pour d autres observateurs C2 : Résister et ne pas nuire à l environnement C3 : Être esthétique et ergonomique C4 : Coûter un prix raisonnable Emission de lumières colorées Rafraîchissement de la couleur Vitesse de déplacement Contrôle à distance Produire au minimum 100 couleurs différentes Au minimum 30 fois par seconde ± 20 couleurs ± 3 fois/s 0,1 m/s à 1 m/s ± 0,1 m/s Pouvoir être contrôlé à plus de 10 m ± 2 m Autonomie 1 heure minimum ± 15 min Visibilité de haut Ne pas être visible à plus de 25 m ± 5 m Visibilité de côté Ne pas être visible à plus de 50 m ± 10 m Nuisances sonores Niveau sonore maximal de 20 db ± 5 db Résister à un choc pour Résistance au choc une vitesse inférieure à 0,5 m/s Dimensions maximales Encombrement H = 10 cm ± 2 cm L = 20 cm ± 5 cm l = 20 cm ± 5 cm Masse maximale 3 kg ± 1 kg Coût maximal 450 ± 50 4 / 16

5 Choix des composants Afin d'être en mesure de connaître la couleur de son environnement, notre robot avait besoin d'un capteur de couleur. Nous avons eu recours au capteur TCS230, car celui-ci présentait différents avantages : une petite taille, un prix raisonnable, et une information délivrée facilement analysable. Ce capteur est implanté sur un petit module qui permet de simplifier les branchements, ainsi que d'éclairer de façon neutre le sol (en blanc) pour fournir ensuite une information plus juste. Son principe de fonctionnement est le suivant : des photodiodes équipées de filtres de couleur rouge, verte et bleue réagissent à la lumière réfléchie par le sol, et génèrent des signaux dont on peut analyser les fréquences, images de la couleur du sol. Pour restituer la couleur du sol, nous avons décidé d utiliser des matrices de LEDs RVB 8x8, car elles constituaient la solution la plus adaptée : étant donné que nous avions prévu d associer à chaque capteur une matrice (ce qui implique que toutes les LEDs d une même matrice produisent une lumière de même couleur à un instant donné), ces matrices nous permettent de créer «une large zone de couleur uniforme» pour chaque capteur, ce qui aurait été difficile à réaliser avec de simples LEDs. Par ailleurs, ces matrices de LEDs présentent d autres avantages : la disposition des broches en deux rangées de 16 facilite les branchements, et leur luminosité, convenable (l objectif du robot n étant pas d éclairer, mais seulement d adopter une couleur), n induit qu une faible consommation d énergie (l intensité maximale du courant requise pour éclairer toutes les matrices de LEDs en même temps est de l ordre de 1,5 A). 5 / 16

6 Afin de faire varier la couleur des matrices de LEDs RVB en fonction des informations envoyées par les capteurs, nous avons eu recours à un microcontrôleur. En effet, cette solution technique est la plus répandue dans les systèmes électroniques, lorsqu il y a besoin de coordonner selon une logique complexe différents composants. Notre choix s est finalement porté sur le PIC16F88, en raison des avantages qu il présentait : une taille et une consommation d énergie réduites, ainsi qu une grande vitesse de calculs et une programmation simplifiée grâce au langage Flowcode. Pour rendre notre robot mobile, nous l avons équipé de deux motoréducteurs, chacun composés d un moteur 3V à courant continu, couplé à une roue en néoprène. 6 / 16

7 Afin de piloter notre robot à distance, nous avions besoin d un système capable de commander les moteurs en fonction d informations communiquées sans fil par l utilisateur. Après plusieurs recherches, l utilisation d un smartphone, appareil en pleine expansion, nous a paru être la meilleure solution pour contrôler le robot. Pour réaliser ce système, nous avons décidé d utiliser conjointement un module Bluetooth (pour recevoir les informations), une carte programmable : l Arduino Uno (pour les traiter) et une interface de puissance : l Ardumoto (pour simplifier la commande des moteurs). Module Bluetooth Arduino Ardumoto Afin de garantir l autonomie énergétique de notre robot, nous l avons doté d une batterie Lithium-polymères, technologie assurant un des meilleurs compromis autonomie/intensité du courant délivré. La batterie choisie fournit une tension de 7,4 V pour une intensité de 3200 mah. 7 / 16
.")
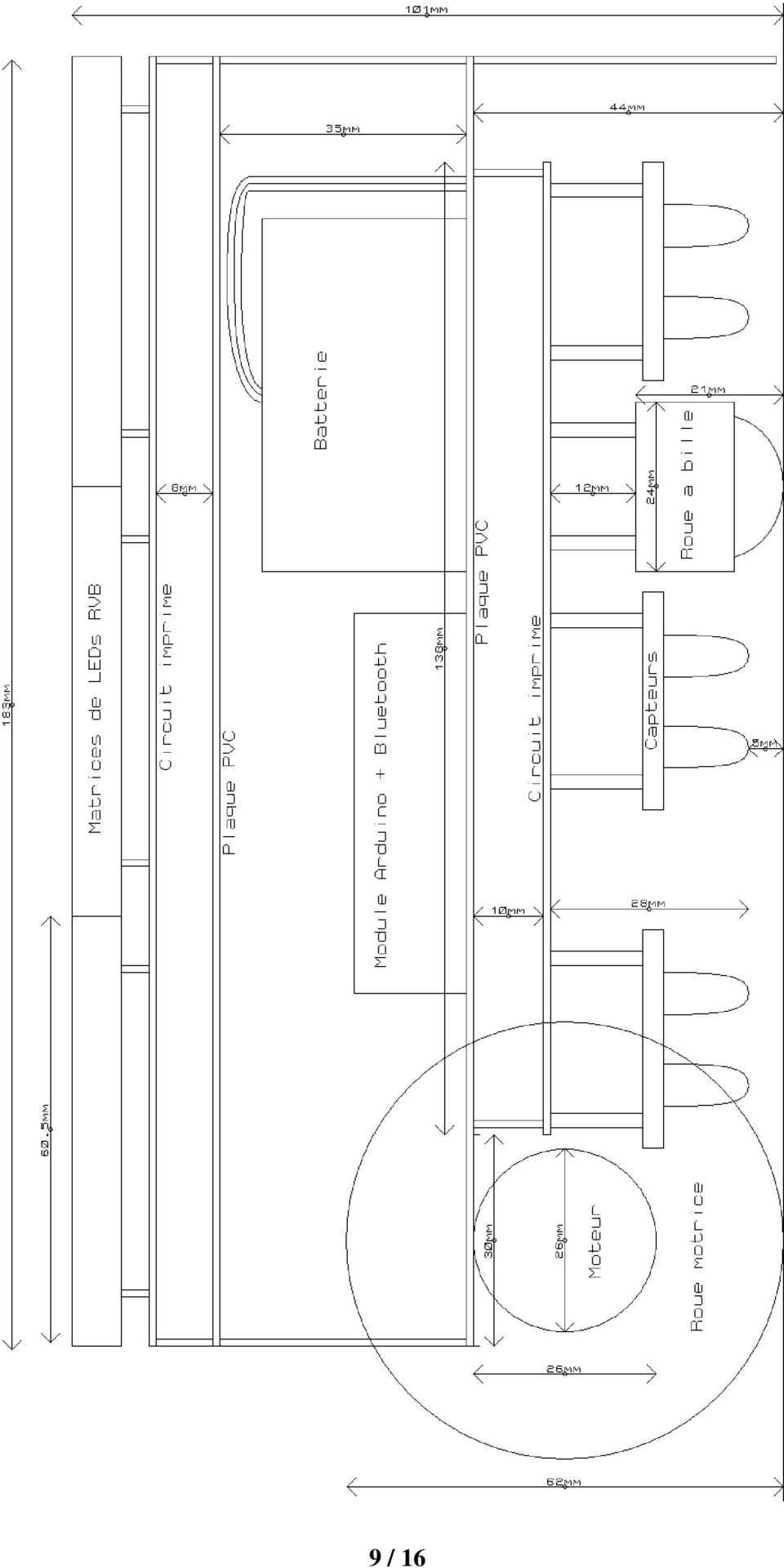
8 La structure du robot L objectif de notre robot est de se camoufler dans la nature, et donc sur une surface multicolore. C est pourquoi nous avons décidé de le doter de 9 zones de couleur indépendantes, chacune associant une matrice et un capteur. Nous avons fait en sorte qu une matrice, positionnée au-dessus d un capteur, prenne la couleur de la surface située juste endessous d elle. En revanche, le nombre de broches et la vitesse de calcul de nos microcontrôleurs étaient suffisants pour nous permettre de faire en sorte qu un seul microcontrôleur pilote deux zones de couleur. Nous avons imaginé une structure en 3 étages, élaborée autour de deux plaques de PVC : La plaque du bas, au dos de laquelle se trouve le circuit imprimé qui comporte les capteurs, situés à proximité du sol. A côté du circuit sont fixés les moteurs, qui entraînent directement les deux roues motrices. Vue de côté, avant du robot Vue de côté, arrière du robot La plaque du haut, qui sert de support au circuit imprimé comportant les matrices de LEDs RVB. Ces dernières sont donc placées au sommet du robot, de sorte qu un observateur debout n aperçoive que cette partie du robot. L intervalle situé entre ces deux plaques est occupé par la batterie, ainsi que par les modules Arduino, Ardumoto et Bluetooth. Les deux circuits imprimés communiquent à l aide de nappes de fils. Le robot ainsi créé ne mesure qu une dizaine de centimètres de hauteur et se présente, vu de haut, comme un carré d une vingtaine de centimètres de côté (seules les deux roues motrices dépasseront légèrement du robot). 8 / 16

9 9 / 16
, un signal électrique dont la fréquence dépend de l intensité de la composante en question dans la lumière incidente.")
10 La capture et l imitation de la couleur du sol On rappelle que nos capteurs délivrent, pour chacune des trois composantes de la lumière (rouge, verte et bleue, selon le principe de la synthèse additive des couleurs), un signal électrique dont la fréquence dépend de l intensité de la composante en question dans la lumière incidente. Notre programme, exécuté par le microcontrôleur, analyse en premier lieu ces signaux, qu il reçoit sur certaines de ses broches, reliées aux capteurs, et détermine les fréquences correspondantes. A la suite de calculs, il en déduit ensuite les composantes de la couleur à restituer aux matrices de LEDs. Pour leur communiquer cette couleur, le microcontrôleur crée, à partir des valeurs précédentes, des signaux électriques de rapports cycliques adéquats, pour les appliquer à chacun des trois types de puces (rouge, verte et bleue) qui constituent les LEDs RVB de nos matrices. Ces puces sont reliées aux broches du microcontrôleur par le biais de transistors, utilisés en commutation (c est-à-dire comme des interrupteurs : ils sont alternativement bloqués et saturés). Ceci va permettre de réguler l intensité lumineuse du rouge, du vert et du bleu de chaque LED, et donc de reconstituer la couleur du sol de manière quasi-instantanée. Rapport cyclique intensité lumineuse temps matrice allumée temps total Exemple de la puce rouge d une LED : Rapport cyclique de 100 % (intensité lumineuse maximale) Rapport cyclique de 50 % Rapport cyclique de 0 % (puce éteinte) 10 / 16


11 Le pilotage à distance Pour pouvoir piloter à distance notre robot, nous avons décidé de mettre en place une communication entre celui-ci et un smartphone, appareil en plein essor et rencontrant un véritable succès populaire. Nous avons donc dû développer deux programmes distincts, sur deux interfaces différentes, pour mettre en place cette communication : le programme pour le smartphone d'une part, et le programme pour l Arduino d'autre part. Nous avons conçu une application smartphone compatible avec le logiciel d exploitation Android. Pour ce faire, nous avons utilisé l outil de développement APPINVENTOR conçu par Google et repris depuis par le MIT. L application que nous avons créée a pour objectif de recueillir les informations de l accéléromètre du téléphone, afin de déterminer l inclinaison de celui-ci, puis de les transmettre en Bluetooth à l Arduino. L interface de notre application permet à l utilisateur de connecter facilement son téléphone au robot, de contrôler intuitivement, rien qu en inclinant son téléphone, les mouvements du robot, ainsi que d avoir un aperçu de sa vitesse et de sa direction, qui lui sont communiquées. 11 / 16

12 Nous avons ensuite réalisé en langage Arduino un programme capable de convertir l'information fournie par le smartphone (via le module Bluetooth) en un signal transmissible aux moteurs. Ce programme peut être résumé en deux étapes : Dans un premier temps, l'arduino cherche à capter l information «inclinaison du smartphone» : pour ce faire, le programme analyse le flux continu de données qu'il reçoit via le module Bluetooth, pour identifier les valeurs de variables, images de l inclinaison du smartphone. Il va ensuite vérifier que ces valeurs sont plausibles, avant de les enregistrer. Dans un second temps, l'arduino commande les moteurs : le programme effectue différents calculs à partir des données récoltées pour en déduire la vitesse et le sens de rotation de chacun des deux moteurs. En s appuyant sur ces valeurs, l'arduino génère alors des signaux électriques de rapports cycliques adéquats vers l Ardumoto, qui va les organiser, tout en les amplifiant, pour commander les deux moteurs. 12 / 16

13 Les étapes de la réalisation Avant de passer à la réalisation concrète de notre robot, nous avons testé nos différents programmes, ainsi que les composants nécessaires à son fonctionnement. Les matrices de LEDs RVB ont ainsi fait l objet de tests poussés afin qu elles produisent une lumière de la couleur la plus précise possible. En effet, les trois puces émettrices (rouge, verte et bleue) d une même LED n ont pas les mêmes spécificités : leurs intensités lumineuses n étant pas identiques. Aussi, afin de préserver les LEDs d un courant trop important, mais également afin de faire en sorte que chaque puce émette de la lumière de même intensité pour une même tension d alimentation, nous avons dû placer des résistances aux bornes de la matrice. Un calcul de résistances a donc été réalisé, afin de faire en sorte que les matrices émettent un blanc uniforme lorsqu elles sont alimentées avec la tension maximale délivrée par la batterie (7,4 V). Ces tests nous ont permis de valider le fonctionnement des matrices, mais également des transistors qui y seront couplés. Matrice Résistance Transistor 13 / 16

14 Ensuite, nous avons testé le programme du PIC16F88 par le biais d une platine de développement, reliée à deux capteurs et à deux LEDs RVB (jouant le rôle de deux matrices), ce qui nous a permis de valider son fonctionnement. LED RVB PIC16F88 Platine de développement Capteurs TCS 230 De même, nous avons réalisé un montage pour tester le fonctionnement du programme Arduino ainsi que du module Bluetooth. Ces tests nous ont permis de vérifier que l Arduino recevait et interprétait correctement les informations envoyées par le smartphone. Après que nous avons vérifié que tous nos composants répondaient à nos attentes et que nos programmes fonctionnaient correctement, nous sommes passés à la réalisation virtuelle des circuits imprimés avec le logiciel Proteus. Nous prévoyons maintenant de souder les composants sur les circuits imprimés, et d assembler les différents éléments du robot. 14 / 16

15 Applications Notre prototype se contente de se camoufler lui-même. Seulement, développée et perfectionnée, la technique de camouflage qu il utilise pourrait servir à dissimuler des objets d une certaine taille, et ce dans de multiples domaines. Par exemple, l approche d animaux sauvages par un robot photographe pourrait ainsi être facilitée avec un robot comme le nôtre, et de même, un véhicule militaire pourrait se fondre dans la nature, en exploitant la technique de camouflage de notre robot. Par ailleurs, si l on s intéresse uniquement à la faculté que notre robot a de reconnaître la couleur du sol, on peut imaginer de multiplier les parcours possibles pour les robots suiveurs de lignes (dans les hôpitaux par exemple), en créant des chemins de différentes couleurs. 15 / 16

16 Résumé du projet : Le but de notre projet est de réaliser un petit robot mobile, pilotable à distance grâce à un smartphone, et capable de se camoufler dans son environnement en prenant la couleur du sol sur lequel il évolue. Pour cela, nous avons utilisé des matrices de LEDs RVB couplées à des capteurs capables d'identifier la couleur du sol, ainsi qu'un système en mesure de recevoir et d interpréter les informations délivrées par le smartphone, pour ensuite commander les moteurs, qui assurent la mobilité de notre robot. Ce dernier est doté de différentes zones indépendantes, chacune pouvant prendre la couleur d'une partie du sol sous le robot (celui-ci peut ainsi se camoufler sur un damier multicolore). Le principe de notre robot pourrait par exemple servir dans le domaine militaire, permettant ainsi de camoufler des systèmes conséquents comme des chars. On peut aussi imaginer, suivant le même principe, des robots d'espionnage, de photographie animalière, etc 16 / 16

Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Création d une application Android (APPInventor)
") 1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Casisa Anthony DOSSIER PERSONNEL
 Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Baccalauréat Professionnel. Microtechniques. Session 2012 DOSSIER TECHNIQUE (DT)
") Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
TP - Alarme de voiture / Approche fonctionnelle
 TP - Alarme de voiture / Approche fonctionnelle Tous les objets techniques, même les plus compliqués, sont étudiés à l aide d une méthode appelée : étude fonctionnelle ou systémique. 1/ Présentation du
TP - Alarme de voiture / Approche fonctionnelle Tous les objets techniques, même les plus compliqués, sont étudiés à l aide d une méthode appelée : étude fonctionnelle ou systémique. 1/ Présentation du
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Projet Robot Centaure
 Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Afficheurs 7 segments à LEDs Géant
 Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Afficheurs 7 segments à LEDs Géant Michaël JOLLAIN Thomas
Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Afficheurs 7 segments à LEDs Géant Michaël JOLLAIN Thomas
ENREGISTREUR DE TEMPERATURE
 ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
FAQ. Téou 10/08/2015
 FAQ Téou 10/08/2015 SOMMAIRE 1 2 3 4 5 6 Prérequis Première utilisation Fonctionnement Batterie : chargement et consommation Assistance et garantie Offres disponibles 7 Impact santé et confidentialité
FAQ Téou 10/08/2015 SOMMAIRE 1 2 3 4 5 6 Prérequis Première utilisation Fonctionnement Batterie : chargement et consommation Assistance et garantie Offres disponibles 7 Impact santé et confidentialité
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS
 PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS Matériel : Un GBF Un haut-parleur Un microphone avec adaptateur fiche banane Une DEL Une résistance
PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS Matériel : Un GBF Un haut-parleur Un microphone avec adaptateur fiche banane Une DEL Une résistance
TP SIN Traitement d image
 TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
LCD COLOR MONITOR (English French Translation)
") LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Comparaison des performances d'éclairages
 Comparaison des performances d'éclairages Présentation Support pour alimenter des ampoules de différentes classes d'efficacité énergétique: une ampoule LED, une ampoule fluorescente, une ampoule à incandescence
Comparaison des performances d'éclairages Présentation Support pour alimenter des ampoules de différentes classes d'efficacité énergétique: une ampoule LED, une ampoule fluorescente, une ampoule à incandescence
Études et Réalisation Génie Électrique
 Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Études et Réalisation Génie Électrique Chargeur de batterie
Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Études et Réalisation Génie Électrique Chargeur de batterie
Présentation des points importants RZR XP 1000
 Présentation des points importants RZR XP 1000 RZR XP 1000 Nouvelle génération : Plus de 500 améliorations, 100 000 heures d ingénierie moteur, des milliers de kilomètres de test équivalent à 2,5 fois
Présentation des points importants RZR XP 1000 RZR XP 1000 Nouvelle génération : Plus de 500 améliorations, 100 000 heures d ingénierie moteur, des milliers de kilomètres de test équivalent à 2,5 fois
MISSION DE L ENTREPRISE. Fabriquer grâce à son savoir faire, des produits en acier, aluminium et polymères pour les vendre sur le marché mondial
 Bureau/presentation corpo/presentation goldcorp/powerpoint minautor AOUT 2013 MISSION DE L ENTREPRISE Fabriquer grâce à son savoir faire, des produits en acier, aluminium et polymères pour les vendre sur
Bureau/presentation corpo/presentation goldcorp/powerpoint minautor AOUT 2013 MISSION DE L ENTREPRISE Fabriquer grâce à son savoir faire, des produits en acier, aluminium et polymères pour les vendre sur
Guide de l utilisateur
 Guide de l utilisateur 25220A À propos de ce guide Merci d avoir fait l acquisition de l ardoise numérique à écran LCD Boogie Board Sync 9.7. Ce guide vous aidera à utiliser l ardoise numérique Boogie
Guide de l utilisateur 25220A À propos de ce guide Merci d avoir fait l acquisition de l ardoise numérique à écran LCD Boogie Board Sync 9.7. Ce guide vous aidera à utiliser l ardoise numérique Boogie
Système d alarme GSM XMD-3200.pro avec connexion via radio et réseau de téléphonie mobile
 Système d alarme GSM XMD-3200.pro avec connexion via radio et réseau de téléphonie mobile FR Mode d emploi PX-1297-675 TABLE DES MATIÈRES Votre nouveau système d alarme domestique...6 Contenu...6 Consignes
Système d alarme GSM XMD-3200.pro avec connexion via radio et réseau de téléphonie mobile FR Mode d emploi PX-1297-675 TABLE DES MATIÈRES Votre nouveau système d alarme domestique...6 Contenu...6 Consignes
Ecran : Processeur : OS : Caméra : Communication : Mémoire : Connectique : Audio : Batterie : Autonomie : Dimensions : Poids : DAS :
 SMARTPHONE - DUAL-CORE - NOIR 3483072425242 SMARTPHONE - DUAL-CORE - BLEU XXXX SMARTPHONE - DUAL-CORE - BLANC 3483072485246 SMARTPHONE - DUAL-CORE - ROSE 3483073704131 SMARTPHONE - DUAL-CORE - ROUGE XXXX
SMARTPHONE - DUAL-CORE - NOIR 3483072425242 SMARTPHONE - DUAL-CORE - BLEU XXXX SMARTPHONE - DUAL-CORE - BLANC 3483072485246 SMARTPHONE - DUAL-CORE - ROSE 3483073704131 SMARTPHONE - DUAL-CORE - ROUGE XXXX
CHALLENGE FORMULA CLASSIC
 REGLEMENT TECHNIQUE 2013 CHALLENGE FORMULA CLASSIC ARTICLE 1 : définition Les monoplaces acceptées dans les épreuves de Formula Classic doivent être dans leur configuration d origine. La cylindrée sera
REGLEMENT TECHNIQUE 2013 CHALLENGE FORMULA CLASSIC ARTICLE 1 : définition Les monoplaces acceptées dans les épreuves de Formula Classic doivent être dans leur configuration d origine. La cylindrée sera
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
Magnum vous présente ses nouvelles gammes d'armoires électriques. Gamme Auto de 125A à 400A
 Magnum vous présente ses nouvelles gammes d'armoires électriques. Gamme Auto de 125A à 400A Spécialement conçue pour l'alimentation des projecteurs asservis via des connectiques multibroches. La gamme
Magnum vous présente ses nouvelles gammes d'armoires électriques. Gamme Auto de 125A à 400A Spécialement conçue pour l'alimentation des projecteurs asservis via des connectiques multibroches. La gamme
! analyse du fonctionnement
 Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
GUIDE DE L UTILISATEUR
 GUIDE DE L UTILISATEUR 9344 - Version 1.0 Janvier 2009 1 - Instructions de sécurité Toute personne ayant à faire avec le montage, la mise en service, le maniement et l'entretien de cet appareil doit être
GUIDE DE L UTILISATEUR 9344 - Version 1.0 Janvier 2009 1 - Instructions de sécurité Toute personne ayant à faire avec le montage, la mise en service, le maniement et l'entretien de cet appareil doit être
Un système d aide aux handicapés
 Olympiades de physique 2006/2007 Un système d aide aux handicapés POTHAIN Mélanie LAFRECHOUX Leslie BOUGEANT Matthieu Lycée G. St Hilaire - ETAMPES encadrés par M. LEFEVRE Sujet : Le carrousel Problématique
Olympiades de physique 2006/2007 Un système d aide aux handicapés POTHAIN Mélanie LAFRECHOUX Leslie BOUGEANT Matthieu Lycée G. St Hilaire - ETAMPES encadrés par M. LEFEVRE Sujet : Le carrousel Problématique
Traceur GPS Antivol. Le traceur est conforme aux normes européennes 95/56 E27
 Traceur GPS Antivol Le traceur est conforme aux normes européennes 95/56 E27 Nous vous remercions d avoir choisi un produit de la gamme ATEXYS pour votre véhicule. Nous vous conseillons de lire attentivement
Traceur GPS Antivol Le traceur est conforme aux normes européennes 95/56 E27 Nous vous remercions d avoir choisi un produit de la gamme ATEXYS pour votre véhicule. Nous vous conseillons de lire attentivement
1995.- Véhicule électrique HS-559 27203. 2850.- Véhicule électrique HS-898 27204. Liberté et qualité de vie. Prix bas permanents. www.landi.
 Mobil www.landi.ch Liberté et qualité de vie Garantie 3 ans Batterie 1 année 1995.- Véhicule électrique HS-559 27203 2850.- Véhicule électrique HS-898 27204 Bienvenue chez LANDI. Qualité LANDI Chez LANDI
Mobil www.landi.ch Liberté et qualité de vie Garantie 3 ans Batterie 1 année 1995.- Véhicule électrique HS-559 27203 2850.- Véhicule électrique HS-898 27204 Bienvenue chez LANDI. Qualité LANDI Chez LANDI
TP N 7 «ALARME INTRUSION» TP découverte «Alarme intrusion filaire LEGRAND»
 Lycée des Métiers «Louise Michel» Rue Villebois Mareuil 16700 RUFFEC T BACPRO ELEEC «ALARME INTRUSION» TP découverte «Alarme intrusion filaire LEGRAND» NOM :.... Prénom :... Page 1 / 11 L ALARME INTRUSION
Lycée des Métiers «Louise Michel» Rue Villebois Mareuil 16700 RUFFEC T BACPRO ELEEC «ALARME INTRUSION» TP découverte «Alarme intrusion filaire LEGRAND» NOM :.... Prénom :... Page 1 / 11 L ALARME INTRUSION
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Parrot démontre sa maîtrise technologique avec le Bebop Drone, un quadricoptère de loisirs avec des caractéristiques d un drone professionnel.
 Parrot démontre sa maîtrise technologique avec le Bebop Drone, un quadricoptère de loisirs avec des caractéristiques d un drone professionnel. Equipé d une caméra 14 mega pixels à objectif fish-eye, le
Parrot démontre sa maîtrise technologique avec le Bebop Drone, un quadricoptère de loisirs avec des caractéristiques d un drone professionnel. Equipé d une caméra 14 mega pixels à objectif fish-eye, le
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
Comment choisir sa tablette?
 Comment choisir sa tablette? Sommaire Ø Critère n 1 : le système d exploitation Ø Critère n 2 : Les caractéristiques techniques Ø Les petits plus Ø Nos bons plans Ø Ils comparent pour vous Lancée en 2010
Comment choisir sa tablette? Sommaire Ø Critère n 1 : le système d exploitation Ø Critère n 2 : Les caractéristiques techniques Ø Les petits plus Ø Nos bons plans Ø Ils comparent pour vous Lancée en 2010
L ÉLECTROCUTION Intensité Durée Perception des effets 0,5 à 1 ma. Seuil de perception suivant l'état de la peau 8 ma
 TP THÈME LUMIÈRES ARTIFICIELLES 1STD2A CHAP.VI. INSTALLATION D ÉCLAIRAGE ÉLECTRIQUE SÉCURISÉE I. RISQUES D UNE ÉLECTROCUTION TP M 02 C PAGE 1 / 4 Courant Effets électriques 0,5 ma Seuil de perception -
TP THÈME LUMIÈRES ARTIFICIELLES 1STD2A CHAP.VI. INSTALLATION D ÉCLAIRAGE ÉLECTRIQUE SÉCURISÉE I. RISQUES D UNE ÉLECTROCUTION TP M 02 C PAGE 1 / 4 Courant Effets électriques 0,5 ma Seuil de perception -
Portier Vidéo Surveillance
 Portier Vidéo Surveillance 1 Réf. 102212 Notice d installation et d utilisation INTRODUCTION : Ce vidéophone est un appareil qui associe un interphone et un système vidéo d une grande facilité d installation
Portier Vidéo Surveillance 1 Réf. 102212 Notice d installation et d utilisation INTRODUCTION : Ce vidéophone est un appareil qui associe un interphone et un système vidéo d une grande facilité d installation
SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T
 SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T Sirène solaire extérieure auto-alimentée sans fil avec récepteur intégré à code tournant. Boîtier polycarbonate de 3mm résistant aux intempéries, autoprotection
SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T Sirène solaire extérieure auto-alimentée sans fil avec récepteur intégré à code tournant. Boîtier polycarbonate de 3mm résistant aux intempéries, autoprotection
Mise en pratique : Etude de spectres
 Mise en pratique : Etude de spectres Introduction La nouvelle génération de spectromètre à détecteur CCD permet de réaliser n importe quel spectre en temps réel sur toute la gamme de longueur d onde. La
Mise en pratique : Etude de spectres Introduction La nouvelle génération de spectromètre à détecteur CCD permet de réaliser n importe quel spectre en temps réel sur toute la gamme de longueur d onde. La
04 NoteCart. 10 NoteCart Simple. 15 NoteLocker SOMMAIRE. Équipements standards p.07 Équipements en option p.08 Références produits p.
 SOMMAIRE 04 NoteCart Équipements standards p.07 Équipements en option p.08 Références produits p.28 10 NoteCart Simple Équipements standards p.13 Équipements en option p.14 Références produits p.30 15
SOMMAIRE 04 NoteCart Équipements standards p.07 Équipements en option p.08 Références produits p.28 10 NoteCart Simple Équipements standards p.13 Équipements en option p.14 Références produits p.30 15
Pose avec volet roulant
 Pose avec volet roulant Coffre volet roulant Coulisse MONTAGE 2 PERSONNES MINIMUM La quincaillerie 4,2 x 25 Les outils (x 10) 3,5 x 9,5 (x 10) (x 1) (x 4) 3 2 1 (x 1) (x 4) 7 1 Positionnez les coulisses
Pose avec volet roulant Coffre volet roulant Coulisse MONTAGE 2 PERSONNES MINIMUM La quincaillerie 4,2 x 25 Les outils (x 10) 3,5 x 9,5 (x 10) (x 1) (x 4) 3 2 1 (x 1) (x 4) 7 1 Positionnez les coulisses
Leçon 1 : Les principaux composants d un ordinateur
 Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
MANUEL D UTILISATION EASY 12
 MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
Procédure appropriée pour éditer les diagrammes avec ECM Titanium
 Procédure appropriée pour éditer les diagrammes avec ECM Titanium Introduction: Dans ce document vous trouverez toutes les renseignements dont vous avez besoin pour éditer les diagrammes avec le logiciel
Procédure appropriée pour éditer les diagrammes avec ECM Titanium Introduction: Dans ce document vous trouverez toutes les renseignements dont vous avez besoin pour éditer les diagrammes avec le logiciel
Vous roulez à. le radar préventif. de jour comme de nuit. haute-résistance
 SensibiliseZ vos conducteurs MesUREZ leurs COMPORTEMENTS Fabrication française robuste Conception innovante : assemblage par sertissage d une tôle Alu-zinc ultra robuste et d un profil d entourage triple
SensibiliseZ vos conducteurs MesUREZ leurs COMPORTEMENTS Fabrication française robuste Conception innovante : assemblage par sertissage d une tôle Alu-zinc ultra robuste et d un profil d entourage triple
Balder. Fauteuils roulants électriques
 Balder Fauteuils roulants électriques Les fauteuils Balder vous mènent un peu plus loin Un fauteuil roulant électrique doit répondre à de nombreux critères : pouvoir vous transporter rapidement et en toute
Balder Fauteuils roulants électriques Les fauteuils Balder vous mènent un peu plus loin Un fauteuil roulant électrique doit répondre à de nombreux critères : pouvoir vous transporter rapidement et en toute
A- Observez la vidéo A présentant le fonctionnement de deux objets techniques que nous
 Nous savons qu'un système d'alarme permet de protéger une habitation en détectant et en signalant une ouverture de porte, de fenêtre ou un mouvement dans une pièce. Mais comment détecter et existe il un
Nous savons qu'un système d'alarme permet de protéger une habitation en détectant et en signalant une ouverture de porte, de fenêtre ou un mouvement dans une pièce. Mais comment détecter et existe il un
Le cadeau publicitaire idéal
 La batterie USB personnalisé qui recharge votre téléphone à 100 % où que vous soyez La batterie externe de secours à emporter partout qui recharge votre téléphone, lecteur mp3, appareil photo numérique,
La batterie USB personnalisé qui recharge votre téléphone à 100 % où que vous soyez La batterie externe de secours à emporter partout qui recharge votre téléphone, lecteur mp3, appareil photo numérique,
Robot de Téléprésence
 Robot de Téléprésence Projet innovant BISCH Simon / FOURURE Florian / VICENTE VALVERDE César 12 Sommaire Introduction... 3 Description du projet... 4 Logiciel de vidéoconférence : Linphone... 5 La connexion...
Robot de Téléprésence Projet innovant BISCH Simon / FOURURE Florian / VICENTE VALVERDE César 12 Sommaire Introduction... 3 Description du projet... 4 Logiciel de vidéoconférence : Linphone... 5 La connexion...
Système de surveillance vidéo
 Conrad sur INTERNET www.conrad.fr N O T I C E Version 12/01 Entretien Pour un fonctionnement correct de votre système de surveillance vidéo, prenez note des conseils suivants : 1/ Tenez la caméra et le
Conrad sur INTERNET www.conrad.fr N O T I C E Version 12/01 Entretien Pour un fonctionnement correct de votre système de surveillance vidéo, prenez note des conseils suivants : 1/ Tenez la caméra et le
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
Eléments constitutifs et synthèse des convertisseurs statiques. Convertisseur statique CVS. K à séquences convenables. Source d'entrée S1
 1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
Otolift Jade Monte-escalier pour escalier droit
 Otolift Jade Monte-escalier pour escalier droit Une combinaison ingénieuse de design et d ergonomie www.otolift.fr Le Jade Otolift Le Jade Otolift est le dernier-né des monteescaliers Otto Ooms. Il a été
Otolift Jade Monte-escalier pour escalier droit Une combinaison ingénieuse de design et d ergonomie www.otolift.fr Le Jade Otolift Le Jade Otolift est le dernier-né des monteescaliers Otto Ooms. Il a été
Centrale d alarme DA996
 Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
La sécurité des biens et des personnes Comment se protéger des intrusions?
 Etablir un croquis du circuit d alimentation énergétique et un croquis du circuit ACOT-02 1/4 Problématique : Nous connaissons ce qu est un système d alarme, sa fonction et les différents éléments qui
Etablir un croquis du circuit d alimentation énergétique et un croquis du circuit ACOT-02 1/4 Problématique : Nous connaissons ce qu est un système d alarme, sa fonction et les différents éléments qui
Luxor. La borne escamotable automatique
 Luxor La borne escamotable automatique Gérer, contrôler et délimiter Les besoins modernes de la planification urbaine exigent des systèmes avancés capables de réglementer les flux de véhicules, aussi bien
Luxor La borne escamotable automatique Gérer, contrôler et délimiter Les besoins modernes de la planification urbaine exigent des systèmes avancés capables de réglementer les flux de véhicules, aussi bien
Le drone de cartographie professionnelle
 Le drone de cartographie professionnelle 4 raisons de choisir l'ebee 01. Réalisez plus de cartes, d'une plus grande précision L'eBee peut couvrir jusqu'à 12 km² au cours d'un seul vol. Quand il survole
Le drone de cartographie professionnelle 4 raisons de choisir l'ebee 01. Réalisez plus de cartes, d'une plus grande précision L'eBee peut couvrir jusqu'à 12 km² au cours d'un seul vol. Quand il survole
CIRCUIT DE CHARGE BOSCH
 LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
Tables. Tables individuelles réglables en hauteur manuellement
 Table réglable en hauteur Ropox Ergobasic, largueur 90 cm, inclinable Cette table économique réglable en hauteur est basée sur la table thérapeutique ROPOX ST, depuis des années une image fidèle dans les
Table réglable en hauteur Ropox Ergobasic, largueur 90 cm, inclinable Cette table économique réglable en hauteur est basée sur la table thérapeutique ROPOX ST, depuis des années une image fidèle dans les
NOTICE TECHNIQUE SSC : Système Solaire Combiné eau chaude sanitaire / appui chauffage maison / appui eau chaude piscine
 NOTICE TECHNIQUE SSC : Système Solaire Combiné eau chaude sanitaire / appui chauffage maison / appui eau chaude piscine «Capteur autonome eau chaude» Choix de la gamme ECOAUTONOME a retenu un capteur solaire
NOTICE TECHNIQUE SSC : Système Solaire Combiné eau chaude sanitaire / appui chauffage maison / appui eau chaude piscine «Capteur autonome eau chaude» Choix de la gamme ECOAUTONOME a retenu un capteur solaire
KIT SOLAIRE EVOLUTIF DE BASE
 PARALLELE ENERGIE KIT SOLAIRE EVOLUTIF DE BASE Ce kit solaire est un système solaire facile à utiliser. Il s agit d un «générateur solaire» qui convertit la lumière du soleil en électricité, et qui peut
PARALLELE ENERGIE KIT SOLAIRE EVOLUTIF DE BASE Ce kit solaire est un système solaire facile à utiliser. Il s agit d un «générateur solaire» qui convertit la lumière du soleil en électricité, et qui peut
0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N
 Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
Jade Monte-escalier pour escalier droit
 Jade Monte-escalier pour escalier droit Une combinaison ingénieuse de design et d ergonomie www.coopman.be Le Jade Le Jade Coopman Comfortlift est le dernier-né des monte-escaliers. Il a été conçu spécialement
Jade Monte-escalier pour escalier droit Une combinaison ingénieuse de design et d ergonomie www.coopman.be Le Jade Le Jade Coopman Comfortlift est le dernier-né des monte-escaliers. Il a été conçu spécialement
NOTICE D UTILISATION
 GSM / SMS Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-sans-fil-gsm-f3/ pour accéder à la notice vidéo du kit d alarme NFO-480030-1307 NOTICE D UTILISATION
GSM / SMS Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-sans-fil-gsm-f3/ pour accéder à la notice vidéo du kit d alarme NFO-480030-1307 NOTICE D UTILISATION
Décor Action. Créateur de fascination. Location de fontaines
 Décor Action Créateur de fascination 1 Location de fontaines Sommaire Edito 3 Réalisations sur-mesure 3 Murs d eau aluminium brossé 4 Murs d eau à intégrer dans une menuiserie 6 Murs d eau Cascade inox
Décor Action Créateur de fascination 1 Location de fontaines Sommaire Edito 3 Réalisations sur-mesure 3 Murs d eau aluminium brossé 4 Murs d eau à intégrer dans une menuiserie 6 Murs d eau Cascade inox
MEMOIRES MAGNETIQUES A DISQUES RIGIDES
 MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
Réseau électrique. Le transport de l énergie électrique depuis la centrale électrique jusqu à la maison de Monsieur Toulemonde
 Alain ROBERT Réseau électrique Le transport de l énergie électrique depuis la centrale électrique jusqu à la maison de Monsieur Toulemonde Fabrication et utilisation de la maquette UTLO - Groupe InterGénérations
Alain ROBERT Réseau électrique Le transport de l énergie électrique depuis la centrale électrique jusqu à la maison de Monsieur Toulemonde Fabrication et utilisation de la maquette UTLO - Groupe InterGénérations
Tableau d Alarme Incendie Type 3 type marche/arrêt avec ou sans flash
 Tableau d Alarme Incendie Type 3 type marche/arrêt avec ou sans flash Références commerciales: TA31300 / TA31301 TA31300 (sans flash) TA31301 (avec flash) Table des matières Présentation... 2 Caractéristiques
Tableau d Alarme Incendie Type 3 type marche/arrêt avec ou sans flash Références commerciales: TA31300 / TA31301 TA31300 (sans flash) TA31301 (avec flash) Table des matières Présentation... 2 Caractéristiques
Prise en main rapide
 Objectif terminal Réaliser un objet communicant Pourquoi? : 20 millards d objets connectés en 2020! Quelques mots sur l outil de développement App Inventor App Inventor pour Android est une application
Objectif terminal Réaliser un objet communicant Pourquoi? : 20 millards d objets connectés en 2020! Quelques mots sur l outil de développement App Inventor App Inventor pour Android est une application
TRAAM STI 2013-2014 Acquisition et exploitations pédagogiques des données sur un système pédagogique
 TRAAM STI 2013-2014 Acquisition et exploitations pédagogiques des données sur un système pédagogique Bilan technique et éléments de développement Fonctionnalités attendues Une vingtaine d établissements
TRAAM STI 2013-2014 Acquisition et exploitations pédagogiques des données sur un système pédagogique Bilan technique et éléments de développement Fonctionnalités attendues Une vingtaine d établissements
Chapitre 13 Numérisation de l information
 DERNIÈRE IMPRESSION LE 2 septembre 2013 à 17:33 Chapitre 13 Numérisation de l information Table des matières 1 Transmission des informations 2 2 La numérisation 2 2.1 L échantillonage..............................
DERNIÈRE IMPRESSION LE 2 septembre 2013 à 17:33 Chapitre 13 Numérisation de l information Table des matières 1 Transmission des informations 2 2 La numérisation 2 2.1 L échantillonage..............................
LE TRAVAIL SUR ÉCRAN DANS LA BRANCHE DES TÉLÉCOMMUNICATIONS
 LE TRAVAIL SUR ÉCRAN DANS LA BRANCHE DES TÉLÉCOMMUNICATIONS DOCUMENT ÉTABLI PAR LA COMMISSION PARITAIRE SANTÉ ET PRÉVENTION DES RISQUES DES TÉLÉCOMMUNICATIONS LE CONTEXTE Quel que soit le secteur d activité,
LE TRAVAIL SUR ÉCRAN DANS LA BRANCHE DES TÉLÉCOMMUNICATIONS DOCUMENT ÉTABLI PAR LA COMMISSION PARITAIRE SANTÉ ET PRÉVENTION DES RISQUES DES TÉLÉCOMMUNICATIONS LE CONTEXTE Quel que soit le secteur d activité,
CELTIC-BAAS-Sa BAAT3003
 Notice technique 01_BASSA_NT001 rév A3 Bloc autonome d alarme sonore type Satellite avec ou sans flash BAAT3003 -F BAAT3017. 52, rue Paul Lescop 92000 NANTERRE t. +33 (0)1 41 37 91 91 f. +33 (0)1 41 37
Notice technique 01_BASSA_NT001 rév A3 Bloc autonome d alarme sonore type Satellite avec ou sans flash BAAT3003 -F BAAT3017. 52, rue Paul Lescop 92000 NANTERRE t. +33 (0)1 41 37 91 91 f. +33 (0)1 41 37
Compatibilité Électromagnétique
 Compatibilité Électromagnétique notions générales et applications à l électronique de puissance Ir. Stéphane COETS 18 mai 2005 Journée d étude en Électronique de Puissance 1 Plan de l exposé La Compatibilité
Compatibilité Électromagnétique notions générales et applications à l électronique de puissance Ir. Stéphane COETS 18 mai 2005 Journée d étude en Électronique de Puissance 1 Plan de l exposé La Compatibilité
2195257 ballons ECS vendus en France, en 2010
 SOLUTIONS D EAU CHAUDE SANITAIRE En 2010, le marché de l ECS en France représente 2 195 257 ballons ECS de différentes technologies. Dans ce marché global qui était en baisse de 1,8 %, les solutions ENR
SOLUTIONS D EAU CHAUDE SANITAIRE En 2010, le marché de l ECS en France représente 2 195 257 ballons ECS de différentes technologies. Dans ce marché global qui était en baisse de 1,8 %, les solutions ENR
Mémo. Infrastructure de charge des véhicules électriques
 Mémo Infrastructure de charge des véhicules électriques Prise Genre de véhicule E-Bikes et E-Scooters Types de véhicules et comportements de charge L électricité nécessaire à la recharge des véhicules
Mémo Infrastructure de charge des véhicules électriques Prise Genre de véhicule E-Bikes et E-Scooters Types de véhicules et comportements de charge L électricité nécessaire à la recharge des véhicules
GS301-A Notice d installation et d utilisation.
 IMPORTANT: LIRE ENTIEREMENT CETTE NOTICE ET LA COMPRENDRE. GARDER CETTE NOTICE EN LIEU SUR ET IMMEDIATEMENT ACCESSIBLE. Alarme Périphérique Infra-Rouge GS301-A Notice d installation et d utilisation. Description
IMPORTANT: LIRE ENTIEREMENT CETTE NOTICE ET LA COMPRENDRE. GARDER CETTE NOTICE EN LIEU SUR ET IMMEDIATEMENT ACCESSIBLE. Alarme Périphérique Infra-Rouge GS301-A Notice d installation et d utilisation. Description
Traitement numérique de l'image. Raphaël Isdant - 2009
 Traitement numérique de l'image 1/ L'IMAGE NUMÉRIQUE : COMPOSITION ET CARACTÉRISTIQUES 1.1 - Le pixel: Une image numérique est constituée d'un ensemble de points appelés pixels (abréviation de PICture
Traitement numérique de l'image 1/ L'IMAGE NUMÉRIQUE : COMPOSITION ET CARACTÉRISTIQUES 1.1 - Le pixel: Une image numérique est constituée d'un ensemble de points appelés pixels (abréviation de PICture
Catalogue Matériel. Banderole. Porte-clés CSV. métal LED. jeton de caddy. Tous les objets sont personnalisables avec vos coordonnées locales
 Catalogue Matériel 2015 Manifs, Congrès et Communication Tous les objets sont personnalisables avec vos coordonnées locales Banderole identique avec finition oeillets AVEC FOURREAUX Réf. : Banderole 1p.
Catalogue Matériel 2015 Manifs, Congrès et Communication Tous les objets sont personnalisables avec vos coordonnées locales Banderole identique avec finition oeillets AVEC FOURREAUX Réf. : Banderole 1p.
Notice d installation sur le véhicule
 Boîtier TACHYCOMGPRS Système de transfert automatique et à distance des données issues des chronotachygraphes numériques (Fichiers au format réglementaire DDD) Notice d installation sur le véhicule Antenne
Boîtier TACHYCOMGPRS Système de transfert automatique et à distance des données issues des chronotachygraphes numériques (Fichiers au format réglementaire DDD) Notice d installation sur le véhicule Antenne
1 Problème 1 : L avion solaire autonome (durée 1h)
") Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Monte-escaliers électriques
 Monte-escaliers électriques LIFTKAR PT Fiable, polyvalent, ingénieux Que vous soyez un utilisateur de fauteuil roulant, une personne à mobilité réduite, une aide à domicile ou un professionnel de santé
Monte-escaliers électriques LIFTKAR PT Fiable, polyvalent, ingénieux Que vous soyez un utilisateur de fauteuil roulant, une personne à mobilité réduite, une aide à domicile ou un professionnel de santé
MANUEL UTILISATEUR DU RECEPTEUR HAICOM HI-303MMF
 MANUEL UTILISATEUR DU RECEPTEUR HAICOM HI-303MMF 1 SOMMAIRE DU MANUEL UTILISATEUR I. LE POSITIONNEMENT PAR GPS..3 II. INTRODUCTION - GPS HAICOM HI-303MMF... 4 III. COMPOSITION DU PACK GPS...5 IV. INSTALLATION
MANUEL UTILISATEUR DU RECEPTEUR HAICOM HI-303MMF 1 SOMMAIRE DU MANUEL UTILISATEUR I. LE POSITIONNEMENT PAR GPS..3 II. INTRODUCTION - GPS HAICOM HI-303MMF... 4 III. COMPOSITION DU PACK GPS...5 IV. INSTALLATION
DBR. VARIZON Diffuseur basse vitesse avec diffusion d air réglable
 VARIZON Diffuseur basse vitesse avec diffusion d air réglable Quelques caractéristiques Type de diffusion et zone de diffusion réglables Convient à tous les types de locaux avec des exigences élevées en
VARIZON Diffuseur basse vitesse avec diffusion d air réglable Quelques caractéristiques Type de diffusion et zone de diffusion réglables Convient à tous les types de locaux avec des exigences élevées en
www.epson.fr/pulsense www.epson.fr/runsense
 www.epson.fr/pulsense www.epson.fr/runsense Faites des mouvements qui font la différence. Pulsense est le capteur d activité et de fréquence nouvelle génération. Il mesure la fréquence et l activité 24h/24,
www.epson.fr/pulsense www.epson.fr/runsense Faites des mouvements qui font la différence. Pulsense est le capteur d activité et de fréquence nouvelle génération. Il mesure la fréquence et l activité 24h/24,
Chapitre 22 : (Cours) Numérisation, transmission, et stockage de l information
 Numérisation, transmission, et stockage de l information") Chapitre 22 : (Cours) Numérisation, transmission, et stockage de l information I. Nature du signal I.1. Définition Un signal est la représentation physique d une information (température, pression, absorbance,
Chapitre 22 : (Cours) Numérisation, transmission, et stockage de l information I. Nature du signal I.1. Définition Un signal est la représentation physique d une information (température, pression, absorbance,
LA SOLUTION D ALARME, DE VIDÉOPROTECTION ET DE DOMOTIQUE INTELLIGENTE ET SANS FIL. Simple à installer, simple à utiliser, haute protection.
 LA SOLUTION D ALARME, DE VIDÉOPROTECTION ET DE DOMOTIQUE INTELLIGENTE ET SANS FIL Simple à installer, simple à utiliser, haute protection. Sommaire LA SOLUTION EVOLOGY EN UN COUP D OEIL L INNOVATION AU
LA SOLUTION D ALARME, DE VIDÉOPROTECTION ET DE DOMOTIQUE INTELLIGENTE ET SANS FIL Simple à installer, simple à utiliser, haute protection. Sommaire LA SOLUTION EVOLOGY EN UN COUP D OEIL L INNOVATION AU
J TB/TW Limiteur de température, contrôleur de température avec afficheur LCD, montage sur rail oméga 35 mm
 JUMO GmbH & Co. KG Adresse de livraison : Mackenrodtstraße 14, 36039 Fulda, Allemagne Adresse postale : 36035 Fulda, Allemagne Téléphone : +49 661 6003-0 Télécopieur : +49 661 6003-607 E-Mail : mail@jumo.net
JUMO GmbH & Co. KG Adresse de livraison : Mackenrodtstraße 14, 36039 Fulda, Allemagne Adresse postale : 36035 Fulda, Allemagne Téléphone : +49 661 6003-0 Télécopieur : +49 661 6003-607 E-Mail : mail@jumo.net
BTS SYSTEMES ELECTRONIQUES
 BTS SYSTEMES ELECTRONIQUES E 6-2 PROJET TECHNIQUE Groupement inter académique Besançon, Dijon, Grenoble, Lyon Dossier de présentation et de validation du sujet de projet Groupement académique : BESANCON
BTS SYSTEMES ELECTRONIQUES E 6-2 PROJET TECHNIQUE Groupement inter académique Besançon, Dijon, Grenoble, Lyon Dossier de présentation et de validation du sujet de projet Groupement académique : BESANCON
Miraboat. Système alarme autonome pour bateaux
 Miraboat Système alarme autonome pour bateaux CATALOGUE 2013 INTRODUCTION 1 UN SYSTÈME ALARME DANS UN BATEAU, POURQUOI, COMMENT. Chaque année, les vols et dégradations dans les bateaux de plaisance sont
Miraboat Système alarme autonome pour bateaux CATALOGUE 2013 INTRODUCTION 1 UN SYSTÈME ALARME DANS UN BATEAU, POURQUOI, COMMENT. Chaque année, les vols et dégradations dans les bateaux de plaisance sont
H E L I O S - S T E N H Y
 Générateurs Electriques Hybrides 100% prêts à l'emploi H E L I O S - S T E N H Y E C O - U P S - SI & H E L I O S - P A D - 2 5 0 - SC- 24 H E L I O S - S P V - 6 E T 9 Modèles présentés: HELIOS-STENHY-SI-3000-220-..+HELIOS-PAD-750-SR-48
Générateurs Electriques Hybrides 100% prêts à l'emploi H E L I O S - S T E N H Y E C O - U P S - SI & H E L I O S - P A D - 2 5 0 - SC- 24 H E L I O S - S P V - 6 E T 9 Modèles présentés: HELIOS-STENHY-SI-3000-220-..+HELIOS-PAD-750-SR-48
be tween Un design épuré pour une colonne LED polyvalente et raffinée Caractéristiques - luminaire options
 Design: Pearl Creative Caractéristiques - luminaire Etanchéité du bloc optique: IP 65 (*) Résistance aux chocs (verre): IK 08 (**) Tension nominale: 230V 50Hz Classe électrique: I ou II (*) Poids (module):
Design: Pearl Creative Caractéristiques - luminaire Etanchéité du bloc optique: IP 65 (*) Résistance aux chocs (verre): IK 08 (**) Tension nominale: 230V 50Hz Classe électrique: I ou II (*) Poids (module):
ELEGANT ET COMPACT. Pièces frontales décoratives ETAP
 K1 ELEGANT ET COMPACT 2 K1 ETAP K1 possède une forme élégante et compacte qui s intègre aux environnements les plus variés. La gamme très complète utilise différentes sources lumineuses et des possibilités
K1 ELEGANT ET COMPACT 2 K1 ETAP K1 possède une forme élégante et compacte qui s intègre aux environnements les plus variés. La gamme très complète utilise différentes sources lumineuses et des possibilités