ETUDE DES E VI V B I RATIO I N O S
|
|
|
- Beatrice Lamontagne
- il y a 7 ans
- Total affichages :
Transcription
1 ETUDE DES VIBRATIONS 1

2 Chapitre I - Présentation et définitions 2

3 Les objectifs à atteindre: 1) Savoir décrire le modèle de l'oscillateur harmonique et savoir l'appliquer à l'étude des systèmes physiques oscillants. 2) Savoir étudier les réponses de ces systèmes, en tenant compte des paramètres caractéristiques et des conditions initiales, 3) Savoir étudier l'énergie de tels systèmes. Pour cela, il est recommandé d'aborder, dans l'ordre, les thèmes suivants : L'oscillateur harmonique. L'oscillateur harmonique amorti. L'oscillateur harmonique forcé 3
 Savoir étudier l'énergie de tels systèmes.")
4 L'étude de ces thèmes nécessite certaines connaissances préalables en mathématiques et en physique : En physique, Le principe fondamental de la dynamique Les théorèmes généraux (de l'énergie cinétique, du moment cinétique). Les définitions des énergies cinétique, potentielle, énergie totale mécanique ou électrique. En mathématiques : il faut savoir résoudre les équations différentielles (du second ordre, linéaires, à coefficients constants, sans et avec second membre) il faut connaître la représentation complexe d'une grandeur sinusoïdale fonction du temps. Développement en série de Fourrier / transformée de fourrier 4
")
5 I) Introduction générale et Définitions a) Exemples d Oscillateurs Ils peuvent être de types différents : mécanique, électrique, acoustique, - la masse accrochée à un ressort, le pendule, - le circuit électrique RLC, - un enfant sur une balançoire, - le balancier d'une horloge, - Sismographe, - haut-parleur, microphone, - instruments de musique à vent ou à cordes, - amortisseurs d'un véhicule, - structure d'une molécule diatomique 5

6 b) Définitions α) Vibrations : Petites variations provoquées par une excitation d une grandeur q autour d une valeur moyenne q e. La fonction q(t) décrit la réponse du système à l'excitation appliquée. Quand l évolution de l oscillateur peut-être décrite par n variables indépendantes, l oscillateur possède n degrés de liberté. Le système physique est appelé oscillateur lorsque q(t) varie périodiquement Un oscillateur est linéaire si son mouvement est décrit par une équation différentielle linéaire. L oscillateur élémentaire linéaire possède un seul degré de liberté. Un oscillateur est libre s il oscille sans interventions extérieures pendant son retour à l équilibre. Un oscillateur est forcé si une action extérieure lui communique de l énergie. Un oscillateur dissipe de l énergie quand il retourne vers son état d équilibre : il est amorti 6

7 Exemple de réponse d'un oscillateur : L'oscillation est de forme quelconque et de période T. La fonction de réponse est telle que : q(t) = q(t+t) 7

8 β) Oscillateur Harmonique - La forme des oscillations est sinusoïdale - L'excitation appliquée au système est très brève, elle disparaît dès que le système oscille, - Les oscillations sont dites libres. -L'énergie totale du système se conserve au cours du temps χ) Oscillateur Harmonique amorti - Le système physique dissipe de l'énergie : l'énergie totale ne se conserve pas dans le temps. Le système est amorti. - Les oscillations sont libres (l excitation initiale n est pas entretenue). δ) L'oscillateur harmonique forcé Le système est soumis à une excitation permanente produite par un dispositif extérieur. Les oscillations sont dites forcées. 8
.")
9 φ) L'oscillateur anharmonique - Le système évolue suivant une loi périodique de forme quelconque ( non sinusoïdale) - Pour des petites variations (approximation des petites oscillations), certains systèmes se comportent comme des oscillateurs harmoniques. L'oscillateur est dit anharmonique. - On montre mathématiquement que toute oscillation périodique se décompose en une somme d'oscillations harmoniques (décomposition de Fourrier). la réponse de ce système physique est celle d un un oscillateur anharmonique. Car q(t) : - est une fonction périodique du temps, - elle est de forme quelconque, 9

10 γ) Forces de Frottement : - Frottement visqueux: Les forces de frottement sont proportionnelles à la vitesse et de sens contraire. r f r = µ.v pour un oscillateur rectiligne dθ M f = µ pour un systeme en rotation dt Exemple de dispositif : 0 P r r r r r la relation fondamentale s'écrit: P + R + T + f = mγ T R f x Frottements solides : La force de frottement est constante et opposée au mouvement 10

11 11

12 II) Démarche générale 1) Définir et décrire le système physique oscillant. 2) Appliquer le «principe fondamental de la dynamique» 3) Résoudre les équations différentielles du second ordre, linéaires, à coefficients constants 4) Déterminer les expressions des énergies cinétique, potentielle élastique et mécanique. 12
 Déterminer les expressions des énergies cinétique, potentielle élastique et")
13 Chapitre II - L Oscillateur Harmonique 13

14 14
15 15

16 16

17 17

18 18
19 19

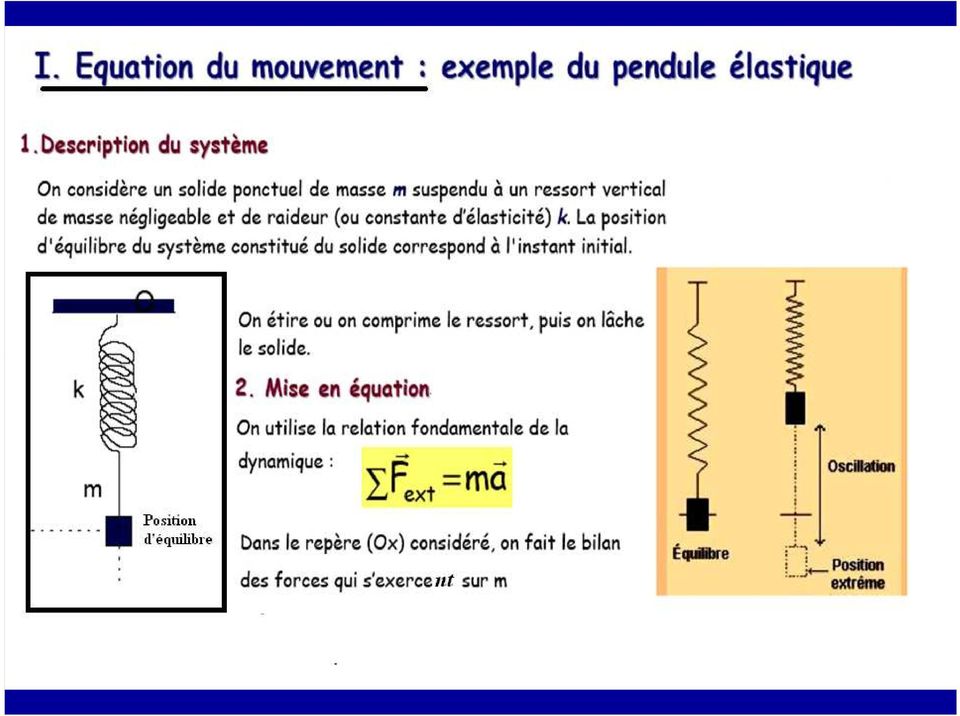
20 Autres Oscillateurs Harmoniques Pendule élastique : x l l Période d oscillation vide P T x O x T = 2π m k Pendule de Torsion: I : moment d inertie / θ C: Constante de torsion T = 2 π I C 20

21 Pendule pesant O OG = a G θ M: masse du pendule I : moment d inertie / P I T = 2 π M g a Pour le pendule simple: T = 2 π l g 21
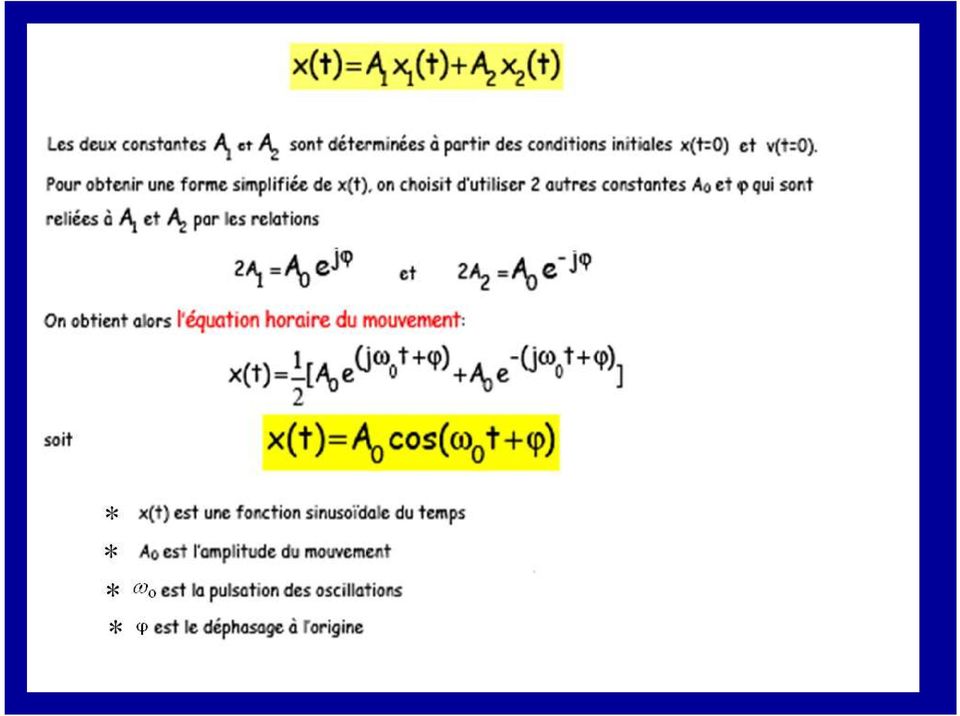
22 1. Oscillateur non amorti Résumé : Oscillateur libre On appelle oscillateur harmonique un système évoluant dans le temps suivant la loi : x = a sin( ω ο t + ϕ ) ω o est la pulsation propre de l oscillateur 2. Équation différentielle caractéristique 2 t x ω = x 0 Inversement : tout système obéissant à l équation ci-dessus est un oscillateur harmonique. 22
23 II - Étude énergétique 1) pendule élastique : On a : x = a sin (ω.t + ϕ) et v = a ω cos (ω.t + ϕ ) l énergie cinétique : 1 1 Ec = m v ² = m a ² ω ² cos ²( ω t + ϕ ) 2 2 L énergie potentielle: 0 E p ( x ) = x 0 k.x.dx Ep = k.x = ka ² sin ²( ω t + ϕ) 2 2 L énergie Mécanique de vibration s écrit : a² 2 E = Ec + Ep = m ω ² cos ²( ω t + ϕ ) + k sin ( ω t + ϕ ) k Soit : E = k.a ² = m ω ²a ² avec ω ² = 2 2 m L Energie mécanique totale est constante 23
24 2) Autres oscillateurs harmoniques Pendule de torsion: Pendule pesant : Ec = J θ & ; Ep = C θ E = Cθ = J ω² θ = Jθ& m m m Ec = I. θ & ; Ep = M.g.a. θ ² E = M.g.a. θ m Circuit LC: E = 1 2 Q m 2 C L oscillateur harmonique non amorti est un système à énergie mécanique constante: C est un système conservatif 24
25 III) Équation différentielle à partir de l énergie mécanique 1 1 t e E m = k x ² + m. x& ² + C 2 2 d E m d x d x& = k. x + m. x& = 0 d t d t d t k && x + x = 0 m Qui est l équation différentielle du mouvement pour un oscillateur harmonique 25
26 26
27 Chapitre III - L Oscillateur Harmonique Amorti 27
28 28
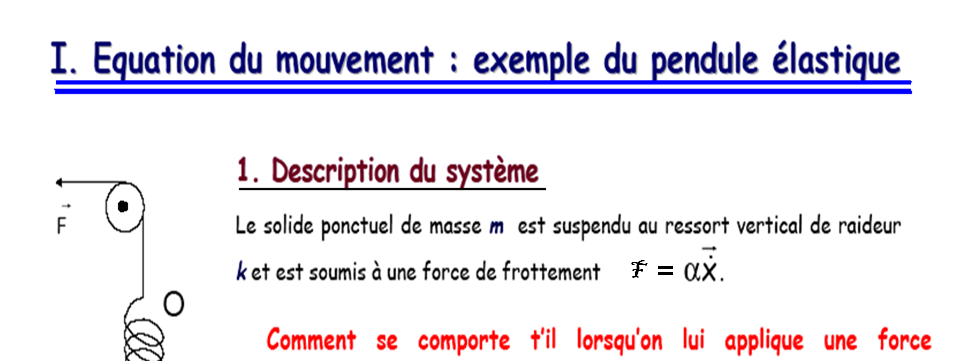
29 2. Mise en équation ( frottement fluide ) F r r ext = ma r r r dl r m i = k( l l ) i + mgi α i 2 dt dt On utilise la relation fondamentale de la dynamique: 2 On obtient : d l o x= ( l l e ) Avec l équation devient : α k && x + x& + x = 0 m m Avec α λ = et ωo = 2m k m && 2 o + 2 & + = 0 x λ x ω x 29
30 30
31 Si λ > ω o Si λ = ω o Si λ < ω o régime apériodique : régime critique : régime pseudopériodique La solution x(t) est alors une combinaison linéaire des deux solutions particulières: x t 1 1 ( ) = e r t x t = e ( ) r t x( t) = A x ( t) + A x ( t) L expression de x(t) dépend donc de la constante d amortissement λ : 31
32 Remarque : la fonction de réponse x(t) n est ni sinusoïdale ni périodique 32
33 33
34 Solution qui peut aussi s écrire : x = A + λt e (1 Bt) Si on suppose qu à l instant t = 0, x = x o et v = 0, on a : x = x o + λ λt e (1 t) et v = λ²x t.e λ o t On constate que x est toujours positif et la vitesse v est toujours négative, donc x décroît de x o à 0 en un temps théoriquement infini: Il n y a plus d oscillations. 34
35 35
36 36
37 Les constantes A et ϕ sont déterminées par les conditions initiales. Par exemple, si à t = 0 on a : x = x o nous obtenons : A = x o et ϕ = π/2 ; v = - λ x o Soit o λt x = x e cos ωt Le système effectue des oscillations d amplitude décroissante et de «pseudo-période» T = 2π/ω 37
38 38
39 A B 39
40 40
41 41
42 x(t) Λ = 0.5 log(2 (2,6 /0,8 0,8) = T = (9,5 3)/2 = 6,25 s λ = Λ/Τ = 0,1 s -1 ) = 0,6 x(t+2t) 42
43 43
44 44
45 45
46 46
47 47
48 Chapitre IV - Oscillateur Harmonique Forcé 48
49 49
50 La fréquence naturelle de l oscillateur est: Réponse d un oscillateur à une force excitatrice pour différentes valeurs de la fréquence d excitation. f = 0,4 Hz f = 1,01 Hz f = 1,6 Hz f 0 = ω 1 k 1Hz 2 π = 2 π m = La force excitatrice s écrit: F = F cos(2 π. f. t) 0
51 51
52 52
53 2 - Étude du régime Forcé On utilise la méthode des complexes. x ( t ) = x co s( ω t + ϕ ) = R x. e o e a e o ( j t ) o e x ( t ) = R x. e ω e j a a v e c x = x. e ϕ o o amplitude complexe de l oscillateur ( j ( ω et + ϕ a ) ) Pour la force d excitation on obtient : ( j t ) e F ( t ) = R F. e ω E e o 53
54 L équation différentielle appliquée à la solution du régime forcé donne : 2 x. e jωet 2 j. x. e jωet 2 x. e jωet A e jωet e o e o o o o ω λω ω + + = ( 2 2 ω ω 2 λ ω ) x + j = A o o e e o x o = A ( ω 2 ω jλω ) o e e o 54

55 55
56 56
57 57
58 Rappel : 58
59 59
60 60
61 61
62 62
63 63


64 64
65 65
66 66
67 67
68 68
69 69
70 70
71 71
72 72

73 73
74 74
75 75
76 76
77 77
78 Chapitre V - Oscillateurs Harmoniques couplés 78
79 Considérons deux oscillateurs harmoniques de longueur à vide l et de raideurs k 1 et k 2 reliés par un ressort de longueur L et de raideur K. On désigne par x 1 et x 2 les déplacements respectifs de m 1 et m 2 par rapport à leurs positions d équilibre. k 1 m 1 K m 2 k 2 T1 T x 1 x 2 Considérons la masse m 1 : elle est soumise aux tension T 1 du ressort k 1 et T due au ressort K. T 1 = - k 1.x 1 T = + k 2 (x 2 x 1 ) 79
80 Action du ressort k 1 : son allongement étant x 1, il exerce sur m 1 une force T 1 = ε. k 1.x 1 (ε=+/ ε=+/ 1) Si x 1 >0 le ressort k 1 est allongé. Il va chercher à se raccourcir en exerçant sur m 1 une force T 1 dirigée vers la gauche. T 1 sera négatif et ε = - 1. Donc T 1 = - k 1.x 1 Si x 1 < 0 le ressort k 1 est comprimé. Il va chercher à s allonger en exerçant sur m 1 une force dirigée vers la droite. T 1 > 0 et x 1 < 0 ε = -1 l expression est la même: T 1 = - k 1.x 1 Action du ressort K : son allongement étant ( x 2 x 1 ) il exerce sur m 1 une force T = ε Κ.(x 2 x 1 ). Si ( x 2 x 1 ) > 0, le ressort K est étiré et va chercher à se raccourcir en exerçant sur m1 une force dirigée vers la droite. T est positif et donc ε = +1. T = + K ( x 2 x 1 ) Si (x 2 x 1 ) < 0 le ressort K est comprimé. Il va chercher à s allonger en repoussant m1. La force T 2 est dirigée vers la gauche. T <0 et (x 2 x 1 ) < 0 ε = + 1. L expression est la même. 80
81 Mise en équation : Le PFD appliqué à m 1 donne la relation : m.x && = k.x + K(x x ) Masse m 2 : Sachant qu elle subit la tension du ressort K et celle du ressort k 2, le même raisonnement conduit à la relation: 1) Cas du couplage d oscillateurs symétriques. m.x && = k.x K(x x ) Les deux oscillateurs reliés par le ressort K sont identiques: Le système devient : m 1 = m 2 = m et k 1 = k 2 = ko. m.x && 1 = k 0.x1 + K(x2 x 1) m.x && 2 = k 0.x2 K(x2 x 1) (1) (2) 81
82 Résolution: en posant S = (x 1 + x 2 ) et D = (x 1 x 2 ) on obtient les deux équations découplées suivantes: Les solutions de ces équations sont: m.s&& = k.s et m.d&& = ( k + 2K ).D 0 0 S = S cos( ω t + ϕ ) et D = D cos( ω t + φ ) o 1 o 2 avec ω = ; ω = k 0 k 0 + 2K 1 m 2 m Sachant que x 1 = (S+D)/2 et x 2 = (S D)/2 on obtient finalement : S o D o x 1 = c o s ( ω 1t + ϕ ) + c o s ( ω 2 t + φ ) 2 2 S o D o x 2 = c o s ( ω 1t + ϕ ) c o s ( ω 2 t + φ )
83 Modes propres Remarque : les oscillations couplées x 1 (t) et x 2 (t) ne sont en général pas sinusoïdales (la somme ou la différence de deux fonctions sinusoïdales de fréquences différentes n est pas une fonction sinusoïdale) Définition: On appelle mode propre du système couplé un mode d oscillation pour lequel tous les paramètres ont des mouvements sinusoïdaux de même pulsation 83
84 -Si D o = 0, alors x 1 (t) = x 2 (t) = S o /2.cos(ω 1 t + ϕ). Les deux oscillateurs oscillent en phase, avec la même pulsation et la même amplitude: c est le premier mode propre ou mode propre symétrique. -Si S o = 0, alors x 1 (t) = - x 2 (t) = D o /2.cos(ω 2 t + φ). Les deux oscillateurs oscillent en opposition de phase, avec la même pulsation et la même amplitude. C est le deuxième mode propre ou mode propre antisymétrique Remarque: En général, il y a autant de modes propres et de pulsations propres ( c.a.d de pulsations pour lesquelles tous les oscillateurs sont en phase) que d oscillateurs. 84
85 2) Oscillateurs couplés dissymétriques Les équations différentielles m.x && = k.x + K(x x ) et m.x && = k.x K(x x ) Peuvent être mise sous la forme plus générale: && x + a.x = b.x && x + a.x = b.x a) Équations aux pulsations propres: Les modes propres sont les solutions particulières du système qui sont sinusoïdales et de même pulsation ω, c.a.d i t x (t) = A.e ω et x (t) = A.e En reportant ces solutions particulières dans le système d équations: iωt 85
86 On obtient : 2 ( ω + a 1)A 1 b1a 2 = 0 2 b 2A 1 + ( ω + a 2 )A 2 = 0 Qui n a de solution non nulle que si le déterminant des coefficients de A 1 et A 2 est nul, c est-à-dire: ( ω + a )( ω + a ) b b = C est l équation aux pulsations propres Cette équation en ω fournit les deux solutions ω 1 et ω 2 acceptables (c.a.d positives), pulsations propres du système dissymétrique couplé Pour ω = ω 1 Pour ω = ω 2 : les deux oscillateurs oscillent en phase : les deux oscillateurs oscillent en opposition de phase Mais toujours avec des amplitudes différentes 86
87 Exemples d oscillateurs couplés Pendules simples α α α α m m m m X 1 (t) X 2 (t) X 1 (t) X 2 (t) 1 er mode propre ( ω 1 ) X 1 (t) = x 2 (t) 2 eme mode propre ( ω 2 ) X 1 (t) = - x 2 (t) 87
88 Pendule double Ο y θ x Α 2m ϕ G Β m Corde plombée y 1 y 3 y 1 y2 y 2 88
89 FIN «Vibrations» 89
90 RAPPELS : Transformée de Fourier 90
91 1) Développement d une fonction périodique en série de Fourier Théorème : Toute fonction périodique f(t), de période T, bornée, est équivalente à une somme infinie de sinusoïdes de fréquences f=n/t, n étant un entier appelé «harmonique» = + + f ( t) a a.cos(2 π. nft) b.sin(2 π. nft) o n n n= 1 n= 1 f ( t) = a + a cos nω t + b sin nωt [ ] o n n n= 1 En posant b n c n = a n + b n et ϕ n = Arctg a n f ( t) = a + c cos( nω t + ϕ ) o n n n= 1 Cn>0 91
92 O n c a lc u le le s c o e ffic ie n ts d e F o u rie r p a r: 1 T a 0 = f ( t ). d t T 0 2 T a = n f ( t ). c o s ( nω t ). d t T 0 2 T b = n f ( t ). s in ( n ω t ). d t T 0 Remarque : si f(t) paire bn = 0 si f(t) impaire an = 0 L ensemble des valeurs a n, b n ou C n constitue le spectre de la fonction f 92
93 les termes a ; a.cos( nωt) ; b.sin( nωt) 0 n sont les composantes de Fourier de f -La composante n = 1 est la composante fondamentale. -Les autres, n = 2, 3... sont les Harmoniques En coordonnées spatiales (x) le D.S.F de h( x) s'écrit: = + + h ( x ) = a + a.cos( nkx ) + b.sin( nkx ) o n n n= 1 n= 1 avec k = 2 π λ vecteur d'onde 1 Id en tité d e P arseval: f ( t ). d t a T 2 2 T 2 2 = n + n n = 1 2 n = 1 2 n a b 93
94 2) Transformée de Fourier Toute fonction f est décomposable en une somme infinie et continue de fonctions sinusoïdales: 1 + f ( t ) = c( ω ) cos [ ωt + ϕ ( ω )] dω 2π f ( t ) = F ( ω ).exp( j ω t ). d ω 2 π ω= où F( ω) est la Transformée de Fourier de f : 1 + F( ω) = f ( t).exp( jωt). dt = 2π t On voit que f est la Transformée Inverse de F 94
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
CHAPITRE IV Oscillations libres des systèmes à plusieurs degrés de liberté
 CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Chapitre 5: Oscillations d un pendule élastique horizontal
 1 re B et C 5 Oscillations d'un pendule élastique horizontal 40 Chapitre 5: Oscillations d un pendule élastique horizontal 1. Définitions a) Oscillateur écanique * Un systèe écanique qui effectue un ouveent
1 re B et C 5 Oscillations d'un pendule élastique horizontal 40 Chapitre 5: Oscillations d un pendule élastique horizontal 1. Définitions a) Oscillateur écanique * Un systèe écanique qui effectue un ouveent
Premier principe : bilans d énergie
 MPSI - Thermodynamique - Premier principe : bilans d énergie page 1/5 Premier principe : bilans d énergie Table des matières 1 De la mécanique à la thermodynamique : formes d énergie et échanges d énergie
MPSI - Thermodynamique - Premier principe : bilans d énergie page 1/5 Premier principe : bilans d énergie Table des matières 1 De la mécanique à la thermodynamique : formes d énergie et échanges d énergie
SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques
 SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques Durée 4 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef
SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques Durée 4 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef
Chapitre 2 Les ondes progressives périodiques
 DERNIÈRE IMPRESSION LE er août 203 à 7:04 Chapitre 2 Les ondes progressives périodiques Table des matières Onde périodique 2 2 Les ondes sinusoïdales 3 3 Les ondes acoustiques 4 3. Les sons audibles.............................
DERNIÈRE IMPRESSION LE er août 203 à 7:04 Chapitre 2 Les ondes progressives périodiques Table des matières Onde périodique 2 2 Les ondes sinusoïdales 3 3 Les ondes acoustiques 4 3. Les sons audibles.............................
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
CONCOURS COMMUN 2010 PHYSIQUE
 CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
CONCOUS COMMUN SUJET A DES ÉCOLES DES MINES D ALBI, ALÈS, DOUAI, NANTES Épreuve de Physique-Chimie (toutes filières) Corrigé Barème total points : Physique points - Chimie 68 points PHYSIQUE Partie A :
Exemples de dynamique sur base modale
 Dynamique sur base modale 1 Exemples de dynamique sur base modale L. CHAMPANEY et Ph. TROMPETTE Objectifs : Dynamique sur base modale réduite, Comparaison avec solution de référence, Influence des modes
Dynamique sur base modale 1 Exemples de dynamique sur base modale L. CHAMPANEY et Ph. TROMPETTE Objectifs : Dynamique sur base modale réduite, Comparaison avec solution de référence, Influence des modes
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Chapitre 5. Le ressort. F ext. F ressort
 Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
5.2 Théorème/Transformée de Fourier a) Théorème
 Théorème") . Théorème de Fourier et Transformée de Fourier Fourier, Joseph (788). Théorème/Transformée de Fourier a) Théorème Théorème «de Fourier»: N importe quelle courbe peut être décomposée en une superposition
. Théorème de Fourier et Transformée de Fourier Fourier, Joseph (788). Théorème/Transformée de Fourier a) Théorème Théorème «de Fourier»: N importe quelle courbe peut être décomposée en une superposition
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Chapitre 11. Séries de Fourier. Nous supposons connues les formules donnant les coefficients de Fourier d une fonction 2 - périodique :
 Chapitre Chapitre. Séries de Fourier Nous supposons connues les formules donnant les coefficients de Fourier d une fonction - périodique : c c a0 f x dx c an f xcosnxdx c c bn f xsinn x dx c L objet de
Chapitre Chapitre. Séries de Fourier Nous supposons connues les formules donnant les coefficients de Fourier d une fonction - périodique : c c a0 f x dx c an f xcosnxdx c c bn f xsinn x dx c L objet de
Chapitre I La fonction transmission
 Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
Chapitre I La fonction transmission 1. Terminologies 1.1 Mode guidé / non guidé Le signal est le vecteur de l information à transmettre. La transmission s effectue entre un émetteur et un récepteur reliés
MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte
![MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte](/thumbs/19/247967.jpg "MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte") I) Cinématique du point matériel: 1) Référentiel: MECANIQUE DU POINT L ensemble de tous les systèmes d axes de coordonnées liés à un même solide de référence S constitue un repère Soit une horloge permettant
I) Cinématique du point matériel: 1) Référentiel: MECANIQUE DU POINT L ensemble de tous les systèmes d axes de coordonnées liés à un même solide de référence S constitue un repère Soit une horloge permettant
TD 9 Problème à deux corps
 PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
CALIBRES OMEGA CO-AXIAL DESCRIPTION ECHAPPEMENT CO-AXIAL REGLAGE OMEGA
 CALIBRES OMEGA CO-AXIAL DESCRIPTION ECHAPPEMENT CO-AXIAL REGLAGE OMEGA Table des matières Page Lexique 3 Description de l échappement Co-Axial 5 Fonctions de l échappement Co-Axial 6 Avantages de l échappement
CALIBRES OMEGA CO-AXIAL DESCRIPTION ECHAPPEMENT CO-AXIAL REGLAGE OMEGA Table des matières Page Lexique 3 Description de l échappement Co-Axial 5 Fonctions de l échappement Co-Axial 6 Avantages de l échappement
ACOUSTIQUE 3 : ACOUSTIQUE MUSICALE ET PHYSIQUE DES SONS
 Matériel : Logiciel winoscillo Logiciel synchronie Microphone Amplificateur Alimentation -15 +15 V (1) (2) (3) (4) (5) (6) ACOUSTIQUE 3 : ACOUSTIQUE MUSICALE ET PHYSIQUE DES SONS Connaissances et savoir-faire
Matériel : Logiciel winoscillo Logiciel synchronie Microphone Amplificateur Alimentation -15 +15 V (1) (2) (3) (4) (5) (6) ACOUSTIQUE 3 : ACOUSTIQUE MUSICALE ET PHYSIQUE DES SONS Connaissances et savoir-faire
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
CONCEPTION PARASISMIQUE DES BATIMENTS (STRUCTURES) INTRODUCTION A LA DYNAMIQUE DES STRUCTURES
 INTRODUCTION A LA DYNAMIQUE DES STRUCTURES") COURS DE CONSTRUCTION PARASISMIQUE VOLUME 2 CONCEPTION PARASISMIQUE DES BATIMENTS (STRUCTURES) INTRODUCTION A LA DYNAMIQUE DES STRUCTURES Introduction à la conception PS des structures - Approche qualitative
COURS DE CONSTRUCTION PARASISMIQUE VOLUME 2 CONCEPTION PARASISMIQUE DES BATIMENTS (STRUCTURES) INTRODUCTION A LA DYNAMIQUE DES STRUCTURES Introduction à la conception PS des structures - Approche qualitative
BTS Groupement A. Mathématiques Session 2011. Spécialités CIRA, IRIS, Systèmes électroniques, TPIL
 BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
1 radian. De même, la longueur d un arc de cercle de rayon R et dont l angle au centre a pour mesure α radians est α R. R AB =R.
 Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Angles orientés Trigonométrie I. Préliminaires. Le radian Définition B R AB =R C O radian R A Soit C un cercle de centre O. Dire que l angle géométrique AOB a pour mesure radian signifie que la longueur
Equations différentielles linéaires à coefficients constants
 Equations différentielles linéaires à coefficients constants Cas des équations d ordre 1 et 2 Cours de : Martine Arrou-Vignod Médiatisation : Johan Millaud Département RT de l IUT de Vélizy Mai 2007 I
Equations différentielles linéaires à coefficients constants Cas des équations d ordre 1 et 2 Cours de : Martine Arrou-Vignod Médiatisation : Johan Millaud Département RT de l IUT de Vélizy Mai 2007 I
Résonance Magnétique Nucléaire : RMN
 21 Résonance Magnétique Nucléaire : RMN Salle de TP de Génie Analytique Ce document résume les principaux aspects de la RMN nécessaires à la réalisation des TP de Génie Analytique de 2ème année d IUT de
21 Résonance Magnétique Nucléaire : RMN Salle de TP de Génie Analytique Ce document résume les principaux aspects de la RMN nécessaires à la réalisation des TP de Génie Analytique de 2ème année d IUT de
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
Initiation à la Mécanique des Fluides. Mr. Zoubir HAMIDI
 Initiation à la Mécanique des Fluides Mr. Zoubir HAMIDI Chapitre I : Introduction à la mécanique des fluides 1 Introduction La mécanique des fluides(mdf) a pour objet l étude du comportement des fluides
Initiation à la Mécanique des Fluides Mr. Zoubir HAMIDI Chapitre I : Introduction à la mécanique des fluides 1 Introduction La mécanique des fluides(mdf) a pour objet l étude du comportement des fluides
Premier principe de la thermodynamique - conservation de l énergie
 Chapitre 5 Premier principe de la thermodynamique - conservation de l énergie 5.1 Bilan d énergie 5.1.1 Énergie totale d un système fermé L énergie totale E T d un système thermodynamique fermé de masse
Chapitre 5 Premier principe de la thermodynamique - conservation de l énergie 5.1 Bilan d énergie 5.1.1 Énergie totale d un système fermé L énergie totale E T d un système thermodynamique fermé de masse
SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite
 Titre : SDLS08 - Modes propres d'une plaque carrée calculé[...] Date : 03/08/2011 Page : 1/6 SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite Résumé : Ce cas test a pour objectif de
Titre : SDLS08 - Modes propres d'une plaque carrée calculé[...] Date : 03/08/2011 Page : 1/6 SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite Résumé : Ce cas test a pour objectif de
PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS
 PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS Matériel : Un GBF Un haut-parleur Un microphone avec adaptateur fiche banane Une DEL Une résistance
PRODUIRE DES SIGNAUX 1 : LES ONDES ELECTROMAGNETIQUES, SUPPORT DE CHOIX POUR TRANSMETTRE DES INFORMATIONS Matériel : Un GBF Un haut-parleur Un microphone avec adaptateur fiche banane Une DEL Une résistance
1.1.1 Signaux à variation temporelle continue-discrète
 Chapitre Base des Signaux. Classi cation des signaux.. Signaux à variation temporelle continue-discrète Les signaux à variation temporelle continue sont des fonctions d une ou plusieurs variables continues
Chapitre Base des Signaux. Classi cation des signaux.. Signaux à variation temporelle continue-discrète Les signaux à variation temporelle continue sont des fonctions d une ou plusieurs variables continues
Charges électriques - Courant électrique
 Courant électrique Charges électriques - Courant électrique Exercice 6 : Dans la chambre à vide d un microscope électronique, un faisceau continu d électrons transporte 3,0 µc de charges négatives pendant
Courant électrique Charges électriques - Courant électrique Exercice 6 : Dans la chambre à vide d un microscope électronique, un faisceau continu d électrons transporte 3,0 µc de charges négatives pendant
n N = u N u N+1 1 u pour u 1. f ( uv 1) v N+1 v N v 1 1 2 t
 v N+1 v N v 1 1 2 t") 3.La méthode de Dirichlet 99 11 Le théorème de Dirichlet 3.La méthode de Dirichlet Lorsque Dirichlet, au début des années 180, découvre les travaux de Fourier, il cherche à les justifier par des méthodes
3.La méthode de Dirichlet 99 11 Le théorème de Dirichlet 3.La méthode de Dirichlet Lorsque Dirichlet, au début des années 180, découvre les travaux de Fourier, il cherche à les justifier par des méthodes
Exercices - Polynômes : corrigé. Opérations sur les polynômes
 Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Opérations sur les polynômes Exercice 1 - Carré - L1/Math Sup - Si P = Q est le carré d un polynôme, alors Q est nécessairement de degré, et son coefficient dominant est égal à 1. On peut donc écrire Q(X)
Comparaison de fonctions Développements limités. Chapitre 10
 PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION
 LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
5. Les conducteurs électriques
 5. Les conducteurs électriques 5.1. Introduction Un conducteur électrique est un milieu dans lequel des charges électriques sont libres de se déplacer. Ces charges sont des électrons ou des ions. Les métaux,
5. Les conducteurs électriques 5.1. Introduction Un conducteur électrique est un milieu dans lequel des charges électriques sont libres de se déplacer. Ces charges sont des électrons ou des ions. Les métaux,
TD de Physique n o 1 : Mécanique du point
 E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable T : pour travailler et mémoriser le cours
 Exo7 Continuité (étude globale). Diverses fonctions Exercices de Jean-Louis Rouget. Retrouver aussi cette fiche sur www.maths-france.fr * très facile ** facile *** difficulté moyenne **** difficile *****
Exo7 Continuité (étude globale). Diverses fonctions Exercices de Jean-Louis Rouget. Retrouver aussi cette fiche sur www.maths-france.fr * très facile ** facile *** difficulté moyenne **** difficile *****
Chapitre 3. Mesures stationnaires. et théorèmes de convergence
 Chapitre 3 Mesures stationnaires et théorèmes de convergence Christiane Cocozza-Thivent, Université de Marne-la-Vallée p.1 I. Mesures stationnaires Christiane Cocozza-Thivent, Université de Marne-la-Vallée
Chapitre 3 Mesures stationnaires et théorèmes de convergence Christiane Cocozza-Thivent, Université de Marne-la-Vallée p.1 I. Mesures stationnaires Christiane Cocozza-Thivent, Université de Marne-la-Vallée
Chapitre 3 Les régimes de fonctionnement de quelques circuits linéaires
 Chapitre 3 Les régimes de fonctionnement de quelques circuits linéaires 25 Lechapitreprécédent avait pour objet l étude decircuitsrésistifsalimentéspar dessourcesde tension ou de courant continues. Par
Chapitre 3 Les régimes de fonctionnement de quelques circuits linéaires 25 Lechapitreprécédent avait pour objet l étude decircuitsrésistifsalimentéspar dessourcesde tension ou de courant continues. Par
CHAPITRE XIII : Les circuits à courant alternatif : déphasage, représentation de Fresnel, phaseurs et réactance.
 XIII. 1 CHAPITRE XIII : Les circuits à courant alternatif : déphasage, représentation de Fresnel, phaseurs et réactance. Dans les chapitres précédents nous avons examiné des circuits qui comportaient différentes
XIII. 1 CHAPITRE XIII : Les circuits à courant alternatif : déphasage, représentation de Fresnel, phaseurs et réactance. Dans les chapitres précédents nous avons examiné des circuits qui comportaient différentes
Didier Pietquin. Timbre et fréquence : fondamentale et harmoniques
 Didier Pietquin Timbre et fréquence : fondamentale et harmoniques Que sont les notions de fréquence fondamentale et d harmoniques? C est ce que nous allons voir dans cet article. 1. Fréquence Avant d entamer
Didier Pietquin Timbre et fréquence : fondamentale et harmoniques Que sont les notions de fréquence fondamentale et d harmoniques? C est ce que nous allons voir dans cet article. 1. Fréquence Avant d entamer
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Module d Electricité. 2 ème partie : Electrostatique. Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere
 http://pagesperso-orange.fr/fabrice.sincere") Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Module d Electricité 2 ème partie : Electrostatique Fabrice Sincère (version 3.0.1) http://pagesperso-orange.fr/fabrice.sincere 1 Introduction Principaux constituants de la matière : - protons : charge
Mécanique. Chapitre 4. Mécanique en référentiel non galiléen
 Mécanique Chapitre 4 Mécanique en référentiel non galiléen I Référentiel en translation Mécanique en référentiel non galiléen Jusqu à présent, nous avons fait de la mécanique du point dans un référentiel
Mécanique Chapitre 4 Mécanique en référentiel non galiléen I Référentiel en translation Mécanique en référentiel non galiléen Jusqu à présent, nous avons fait de la mécanique du point dans un référentiel
Une fréquence peut-elle être instantanée?
 Fréquence? Variable? Instantané vs. local? Conclure? Une fréquence peut-elle être instantanée? Patrick Flandrin CNRS & École Normale Supérieure de Lyon, France Produire le temps, IRCAM, Paris, juin 2012
Fréquence? Variable? Instantané vs. local? Conclure? Une fréquence peut-elle être instantanée? Patrick Flandrin CNRS & École Normale Supérieure de Lyon, France Produire le temps, IRCAM, Paris, juin 2012
Chapitre 4 - Spectroscopie rotationnelle
 Chapitre 4 - Spectroscopie rotationnelle 5.1 Classification Déterminer à quelle catégorie (sphérique, symétrique, asymétrique) appartiennent ces molécules : a) CH 4, b) CH 3 F, c) CH 3 D, d) SF 6, e) HCN,
Chapitre 4 - Spectroscopie rotationnelle 5.1 Classification Déterminer à quelle catégorie (sphérique, symétrique, asymétrique) appartiennent ces molécules : a) CH 4, b) CH 3 F, c) CH 3 D, d) SF 6, e) HCN,
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
M1107 : Initiation à la mesure du signal. T_MesSig
 1/81 M1107 : Initiation à la mesure du signal T_MesSig Frédéric PAYAN IUT Nice Côte d Azur - Département R&T Université de Nice Sophia Antipolis frederic.payan@unice.fr 15 octobre 2014 2/81 Curriculum
1/81 M1107 : Initiation à la mesure du signal T_MesSig Frédéric PAYAN IUT Nice Côte d Azur - Département R&T Université de Nice Sophia Antipolis frederic.payan@unice.fr 15 octobre 2014 2/81 Curriculum
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
TABLE DES MATIERES CHAPITRE 1 OSCILLATEURS LINÉAIRES...3
 TABLE DES MATIERES CHAPITRE 1 OSCILLATEURS LINÉAIRES...3 I. OSCILLATEURS HARMONIQUES AMORTIS...3 II. ANALYSE QUALITATIVE...5 1. Energétique...5. L'espace des phases...5 3. Visualisation de l'espace des
TABLE DES MATIERES CHAPITRE 1 OSCILLATEURS LINÉAIRES...3 I. OSCILLATEURS HARMONIQUES AMORTIS...3 II. ANALYSE QUALITATIVE...5 1. Energétique...5. L'espace des phases...5 3. Visualisation de l'espace des
Représentation des Nombres
 Chapitre 5 Représentation des Nombres 5. Representation des entiers 5.. Principe des représentations en base b Base L entier écrit 344 correspond a 3 mille + 4 cent + dix + 4. Plus généralement a n a n...
Chapitre 5 Représentation des Nombres 5. Representation des entiers 5.. Principe des représentations en base b Base L entier écrit 344 correspond a 3 mille + 4 cent + dix + 4. Plus généralement a n a n...
Puissances d un nombre relatif
 Puissances d un nombre relatif Activités 1. Puissances d un entier relatif 1. Diffusion d information (Activité avec un tableur) Stéphane vient d apprendre à 10h, la sortie d une nouvelle console de jeu.
Puissances d un nombre relatif Activités 1. Puissances d un entier relatif 1. Diffusion d information (Activité avec un tableur) Stéphane vient d apprendre à 10h, la sortie d une nouvelle console de jeu.
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Donner les limites de validité de la relation obtenue.
 olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
3ème séance de Mécanique des fluides. Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait. 2 Écoulements potentiels
 3ème séance de Mécanique des fluides Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait 1 Généralités 1.1 Introduction 1.2 Équation d Euler 1.3 Premier théorème de Bernoulli 1.4
3ème séance de Mécanique des fluides Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait 1 Généralités 1.1 Introduction 1.2 Équation d Euler 1.3 Premier théorème de Bernoulli 1.4
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Mécanique : Cinématique du point. Chapitre 1 : Position. Vitesse. Accélération
 2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Communication parlée L2F01 TD 7 Phonétique acoustique (1) Jiayin GAO <jiayin.gao@univ-paris3.fr> 20 mars 2014
 Jiayin GAO <jiayin.gao@univ-paris3.fr> 20 mars 2014") Communication parlée L2F01 TD 7 Phonétique acoustique (1) Jiayin GAO 20 mars 2014 La phonétique acoustique La phonétique acoustique étudie les propriétés physiques du signal
Communication parlée L2F01 TD 7 Phonétique acoustique (1) Jiayin GAO 20 mars 2014 La phonétique acoustique La phonétique acoustique étudie les propriétés physiques du signal
DOCM 2013 http://docm.math.ca/ Solutions officielles. 1 2 10 + 1 2 9 + 1 2 8 = n 2 10.
 A1 Trouvez l entier positif n qui satisfait l équation suivante: Solution 1 2 10 + 1 2 9 + 1 2 8 = n 2 10. En additionnant les termes du côté gauche de l équation en les mettant sur le même dénominateur
A1 Trouvez l entier positif n qui satisfait l équation suivante: Solution 1 2 10 + 1 2 9 + 1 2 8 = n 2 10. En additionnant les termes du côté gauche de l équation en les mettant sur le même dénominateur
ANALYSE SPECTRALE. monochromateur
 ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
SYSTEMES LINEAIRES DU PREMIER ORDRE
 SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Famille continue de courbes terminales du spiral réglant pouvant être construites par points et par tangentes
 Famille continue de courbes terminales du spiral réglant pouvant être construites par points et par tangentes M. Aubert To cite this version: M. Aubert. Famille continue de courbes terminales du spiral
Famille continue de courbes terminales du spiral réglant pouvant être construites par points et par tangentes M. Aubert To cite this version: M. Aubert. Famille continue de courbes terminales du spiral
Moteurs pas à pas Michel ABIGNOLI Clément GOELDEL Principe des moteurs pas à pas Structures et modèles de description Alimentation Commande
 Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Interactions des rayonnements avec la matière
 UE3-1 : Biophysique Chapitre 2 : Interactions des rayonnements avec la matière Professeur Jean-Philippe VUILLEZ Année universitaire 2011/2012 Université Joseph Fourier de Grenoble - Tous droits réservés.
UE3-1 : Biophysique Chapitre 2 : Interactions des rayonnements avec la matière Professeur Jean-Philippe VUILLEZ Année universitaire 2011/2012 Université Joseph Fourier de Grenoble - Tous droits réservés.
ÉVALUATION FORMATIVE. On considère le circuit électrique RC représenté ci-dessous où R et C sont des constantes strictement positives.
 L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Vibrations des milieux discrets et continus. Luc Jaouen
 Vibrations des milieux discrets et continus Luc Jaouen Version datée du 9 avril 5 Table des matières Introduction iii Un Degré De Liberté. Oscillations libres..............................................
Vibrations des milieux discrets et continus Luc Jaouen Version datée du 9 avril 5 Table des matières Introduction iii Un Degré De Liberté. Oscillations libres..............................................
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
Champ électromagnétique?
 Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
PHYS-F-104_C) Physique I (mécanique, ondes et optiques) Solutions des questions d'examens (2004-2013)
 Physique I (mécanique, ondes et optiques) Solutions des questions d'examens (2004-2013)") PRESSES UNIVERSITAIRES DE BRUXELLES UNIVERSITÉ LIBRE DE BRUXELLES Physique I (mécanique, ondes et optiques) Solutions des questions d'examens (004-013) Pascal VANLAER Titulaire Notes rédigées par Pierre
PRESSES UNIVERSITAIRES DE BRUXELLES UNIVERSITÉ LIBRE DE BRUXELLES Physique I (mécanique, ondes et optiques) Solutions des questions d'examens (004-013) Pascal VANLAER Titulaire Notes rédigées par Pierre
Filtres passe-bas. On utilise les filtres passe-bas pour réduire l amplitude des composantes de fréquences supérieures à la celle de la coupure.
 Filtres passe-bas Ce court document expose les principes des filtres passe-bas, leurs caractéristiques en fréquence et leurs principales topologies. Les éléments de contenu sont : Définition du filtre
Filtres passe-bas Ce court document expose les principes des filtres passe-bas, leurs caractéristiques en fréquence et leurs principales topologies. Les éléments de contenu sont : Définition du filtre
Exo7. Limites de fonctions. 1 Théorie. 2 Calculs
 Eo7 Limites de fonctions Théorie Eercice Montrer que toute fonction périodique et non constante n admet pas de ite en + Montrer que toute fonction croissante et majorée admet une ite finie en + Indication
Eo7 Limites de fonctions Théorie Eercice Montrer que toute fonction périodique et non constante n admet pas de ite en + Montrer que toute fonction croissante et majorée admet une ite finie en + Indication
Introduction à l analyse numérique : exemple du cloud computing
 Introduction à l analyse numérique : exemple du cloud computing Tony FEVRIER Aujourd hui! Table des matières 1 Equations aux dérivées partielles et modélisation Equation différentielle et modélisation
Introduction à l analyse numérique : exemple du cloud computing Tony FEVRIER Aujourd hui! Table des matières 1 Equations aux dérivées partielles et modélisation Equation différentielle et modélisation
Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point (x 0,y 0,z 0 ) donné :
 donné :") Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point