UNIVERSITE DE REIMS CHAMPAGNE ARDENNE MASTER ELECTRONIQUE ELECTROTECHNIQUE AUTOMATIQUE ET INFORMATIQUE INDUSTRIELLE VD2
|
|
|
- Adélaïde Chassé
- il y a 8 ans
- Total affichages :
Transcription
1 UNIVERSITE DE REIMS CHAMPAGNE ARDENNE MASTER ELECTRONIQUE ELECTROTECHNIQUE AUTOMATIQUE ET INFORMATIQUE INDUSTRIELLE VD2 BRUNET Jean-Marie Chef de Projet (Etudiant) LEFEVRE Alexandre Coéquipier (Etudiant) GHEZA Thibault Coéquipier (Etudiant) MAI Jean-Luc Spectateur (Etudiant) LEGER Mathias Spectateur (Etudiant) BENAMARA Ahcene Spectateur (Etudiant) CUPERLIER Jérémy Spectateur (Etudiant) BENGAIOFF Ambroise Spectateur (Etudiant) BROCARD Jérémie Spectateur (Etudiant) RIERA Bernard Spectateur (Enseignant) Edition Date Nature de l'évolution VD4 18/11/2012 Mise en page VD3 17/11/2012 Regroupement de partie VD2 14/11/2012 Evolution du fonctionnement VD1 02/11/2012 Première édition Master EEAII-Reims 1

2 1 DEFINITION DES EXIGENCES DESCRIPTION GENERALE DU SYSTEME (LOT 11) Finalité, mission et objectifs du système Contexte organique du système DOCUMENT DES EXIGENCES TECHNIQUES (REFERENTIEL D'EXIGENCES) (LOT 12) Exigences fonctionnelles Exigences de performance Exigences d'interfaces (fonctionnelles, physiques) Exigences opérationnelles Contraintes Exigences de validation DOSSIER DE CONCEPTION ARCHITECTURALE DU SYSTEME EN SOUS-SYSTEMES DESCRIPTION GENERALE (LOT 21) ARCHITECTURE FONCTIONNELLE ET COMPORTEMENTALE (LOT 22) Arborescence fonctionnelle statique Architecture fonctionnelle et dynamique ARCHITECTURE ORGANIQUE / PHYSIQUE (LOT 23) Arborescence organique / physique Architecture organique / physique MOYENS CONSOMMES, UTILISES, PRODUITS (LOT 24) INTERFACES (LOT 25) Définition des interfaces externes au système Définition des interfaces internes au système DESCRIPTIONS FONCTIONNELLE ET ORGANIQUE DES SOUS SYSTEMES (LOT 26) Nomenclature de définition du système Schéma général d interconnexion électrique (puissance et commande-contrôle) Schéma de description de la chaîne cinématique DOSSIER JUSTIFICATIF DU CHOIX DE L ARCHITECTURE RETENUE (LOT 41) DOSSIER JUSTIFICATIF DE LA CONCEPTION (LOT 42) DOSSIER D ETUDE DE MAINTENABILITE - DEFINITION DE LA MAINTENANCE DOSSIER D ETUDES DE MAINTENABILITE (LOT 61) PLAN DE MAINTENANCE ET (LOT 62) FICHES DE MAINTENANCES (LOT 63) Master EEAII-Reims 2
... 12 2.2. ARCHITECTURE FONCTIONNELLE ET COMPORTEMENTALE (LOT 22)... 13 2.2.1. Arborescence fonctionnelle statique.")
3 6.4. VALIDATION DU PLAN DE MAINTENANCE (LOT 64) MANAGEMENT DU PROJET ORGANISATION ET SUIVI DE PROJET (LOT 71) Liste des jalons et attendus des points clés du projet WBS et OT Calendrier prévisionnel et constaté Bilan des points d avancement intermédiaire (synthétique) PILOTAGE PAR LA QUALITE, LES COUTS ET LES DELAIS (LOT 72) Études d'analyse de la valeur réalisées relatives au coût du produit et au coût de son développement Fourniture de la courbe d évolution des consommations sur budget de développement Fourniture de la courbe d évolution du coût unitaire du produit MANAGEMENT DES RISQUES (LOT 73) DOSSIER DE REALISATION (LOT 80) ANNEXES Programmation programme principal Programmation programme Maintenance Plan de construction Master EEAII-Reims 3
... 49 8. DOSSIER DE REALISATION (LOT 80)... 50 9. ANNEXES... 51")
4 1 DEFINITION DES EXIGENCES 1.1. DESCRIPTION GENERALE DU SYSTEME (LOT 11) Finalité, mission et objectifs du système Le Barman Robot a comme mission répondre aux commandes du (des) client(s) par l intermédiaire d un cahier des charges fonctionnels. Celui-ci devra être automatisé afin d être autonome et pouvoir réaliser 12 commandes sur un intervalle de 8h. Finalité Mission Objectifs Les clients doivent récupérer les boissons correspondantes à leurs commandes initiales - Prendre les commandes des clients assis devant le comptoir - Apporter et déposer les boissons répondant aux commandes du client - Revenir en position d'attente et s'arrêter - Identifier la nature de la commande - Aller chercher la boisson sur l'étagère - Déposer devant le client la boisson correspondant à sa commande - Suivre la ligne tracée au sol entre le comptoir et l'étagère - Eviter les obstacles situés sur le parcours à effectuer et attendre que l'obstacle soit évacué pour poursuivre la mission - Durée maximale pour effectuer la mission : 4 minutes Afin de répondre aux exigences de cette mission, on dispose d un plateau équipé de lignes noires nous permettant de faire déplacer le robot entre le bar et le système de stockage des boissons. Le Barman Robot peut être confronté à une commande par l un des deux clients, ou par une commande simultanée des deux clients. Les clients ont le choix entre 3 types de boissons repérées par des couleurs différentes. Les boissons sont disponibles dans le système de stockage et sont au nombre de trois. Le système de stockage est réapprovisionné à chaque nouvelle commande. Master EEAII-Reims 4

5 Contexte organique du système Voici l'ensemble du système représenté par un diagramme de cas d'utilisation «Use Case» dans le cadre du concours. Fig1.Use case Le schéma suivant représente l'environnement dans lequel évolue le robot. Fig2.Schéma organique du système Master EEAII-Reims 5

6 Contexte fonctionnel du système Ce diagramme met en avant les liens qui existent entre le robot et son environnement. Fig.3.Diagramme de contexte Master EEAII-Reims 6

7 1.2. DOCUMENT DES EXIGENCES TECHNIQUES (REFERENTIEL D'EXIGENCES) (LOT 12) Exigences fonctionnelles Le tableau rassemble les fonctions que le robot effectue au cours de sa mission. Ces fonctions sont elles-mêmes décomposées en sous-fonctions. Ex.fc1 : Le robot doit aller prendre les commandes de boissons passées par les clients Ex.fc1-1 : Le robot se déplace dans le bar de la cafétéria Ex.fc1-2 : Le robot détecte les pastilles au sol Ex.fc1-3 : Le robot détecte les jetons des clients Ex.fc2 : Le robot doit aller chercher les bouteilles de boissons correspondantes aux commandes Ex.fc2-1 : Le robot se dirige vers l'étagère de boissons Ex.fc2-2 : Le robot saisie les boissons répondant aux commandes des clients Ex.fc2-2 : Le robot doit pouvoir déplacer une ou plusieurs boissons Ex.fc3 : Le robot doit pouvoir apporter les commandes des clients sur le comptoir du bar Ex.fc4 : Le robot doit répondre aux demandes des clients Ex.fc3-1 : Le robot doit déposer les boissons devant les clients sur le comptoir Ex.fc4-1 : Le robot doit prendre une commande unique de boisson par client Ex.fc5 : Le robot rejoint la zone de repos et s'arrête Ex.fc6 : Le robot se déplace de manière autonome Ex.fc7 : Le robot doit détecter les obstacles et s'arrêter Ex.fc4-2 : Le robot doit prendre une commande simultanée d une boisson par client. Master EEAII-Reims 7

8 Exigences de performance Ex.prf1 Ex.prf2 Ex.prf3 Ex.prf4 Le robot doit pouvoir réaliser 12 épreuves successives de service sur une période de service maximale de 8 heures. Le robot doit effectuer sa mission en maximum 4 minutes. Le robot doit avoir une autonomie lui permettant de réaliser les 12 épreuves Durant 8 heures au maximum. Les boissons devront être contenues dans les zones situées devant les clients en position verticale Exigences d'interfaces (fonctionnelles, physiques) Ex.int1 Ex.int2 L'opérateur lance le démarrage de la mission du robot par une pression sur un capteur. Seul un membre du jury peut évacuer l'obstacle présent sur le chemin du robot Exigences opérationnelles Modes opérationnels et scénarios opérationnels Ex.op1 Ex.op2 Ex.op3 Le robot est en fonctionnement normal ou alors il est en veille. Le robot est en veille dans sa position de repos ou quand il y a détection d'un obstacle. Dans ce cas le robot repasse en fonctionnement normal après appuie sur le capteur de pression Le robot est en fonctionnement normal le reste du temps Exigences d'ergonomie Ex.erg1 Ex.erg2 Quand le robot termine sa mission, il doit pouvoir être relancé grâce à un simple appuie sur son capteur de pression Le robot doit être facilement préhensible Master EEAII-Reims 8

9 Exigences de sûreté de fonctionnement Ex.sf1 Ex.sf2 Ex.sf3 Le robot doit pouvoir s'arrêter en présence d'un obstacle et attendre son évacuation Le robot doit être opérationnel à tout moment tout en respectant le cahier des charges Le système est maintenable pendant et hors épreuves Exigences d'environnement opérationnel Ex.env_op1 Ex.env_op2 Le robot doit être assemblé et opérationnel en 20 minutes Le système possède un environnement de déplacement de 600 mm de large par 2500 mm de long Ex.env_op3 La température ambiante entourant le robot évolue dans une plage de 15 à 32 C Ex.env_op4 Le robot sera soumis à une pression atmosphérique comprise entre 1000 et 1030 mb Ex.env_op5 Le robot devra s'adapter à une hygrométrie comprise entre 40 et 75 % Exigences de stockage et de transport Ex.stock_trans1 Le robot est transportable du lieu de conception au lieu du concours RobAFIS Ex.stock_trans2 Le robot doit transporter les boissons sans que celles-ci ne touchent le sol Exigences de maintenance Ex.maint1 Ex.maint2 Ex.maint3 Ex.maint4 Ex.maint5 Le robot doit pouvoir être maintenable Le robot peut posséder des piles de rechanges Les différents capteurs et servomoteurs peuvent être testés par le robot Les étudiants disposent du câble usb pour effectuer une maintenance sur le robot Le robot peut être vérifié par un test automatique complet ou procéder à un rechargement du logiciel interne au robot Master EEAII-Reims 9

10 Contraintes Contraintes de conception et de réalisation Conception : Cntr.cpt1 Le robot devra être conçu pour être capable de réaliser sans maintenance préventive ou curative le service de 12 commandes par jour (sur une durée de 8 heures) Réalisation : C.real2 Le robot utilise uniquement des composants du kit LEGO Mindstorms NXT 2.0 Il ne sera admis, ni ajout (pièce, matériaux, capteur, colle, par exemple), ni modification d un quelconque constituant du kit, pour la réalisation du robot C.real3 C.real4 C.real5 C.real6 C.real7 C.real8 C.real9 C.real10 Le robot doit pouvoir être assemblé et mis en configuration opérationnelle en moins de 20 minutes par une équipe de 3 personnes extérieures à l équipe de conception Le robot doit pouvoir être assemblé et mis en configuration opérationnelle en moins de 20 minutes Le robot doit être testable et maintenable Le robot est piloté soit à partir de l'outil de programmation fourni dans le kit principal soit à partir d'une programmation JAVA, C, tout langage ou application de programmation basé sur C ou java pourra être utilisé A l issue de chaque épreuve, les équipes disposent de 5 minutes pour réaliser les opérations de maintenance nécessaire pour remettre en état leur robot conformément à sa configuration matérielle initiale, pour vérifier le robot par un test automatique complet ou procéder à un rechargement du logiciel interne au robot Le changement des piles ou accus sera possible entre deux rencontres, mais sera sanctionné par l application d une pénalité La durée maximale pour effectuer la mission est de 4 minutes. L épreuve est considérée comme terminée au-delà de 6 minutes La La réussite de la mission consiste à servir la commande simultanée de deux clients Master EEAII-Reims 10
, ni modification d un quelconque constituant du kit, pour la réalisation du robot C.real3 C.real4 C.real5 C.real6 C.")
11 C.p1 Contraintes physiques (dimensions) Les dimensions maximales du robot lorsqu'il se trouve au repos n'excèdent pas un carré de 30 cm par 30 cm de côté et une hauteur de 30cm C.mes1 Contraintes de mise en service, de montage Mise en service : le robot est démontable C.rs1 Contraintes de retrait de service A l'issue du concours, les pièces du robot doivent pouvoir être récupérées Contraintes de l environnement C.env1 Température ambiante évoluant dans une plage de 15 à 32 C C.env2 Pression atmosphérique comprise entre 1000 et 1030 mb C.env3 Hygrométrie comprise entre 40 et 75 % C.env4 C.env5 C.env6 C.env7 La cafétéria fait l objet d un éclairage régulier (lumière ambiante de la salle dans laquelle il se trouve, sans éclairage d appoint), excepté les zones d ombres produites par les objets présents (bouteilles, clients) et le robot lui-même La cafétéria a un encombrement de 1200 mm x 2500 mm Le comptoir de couleur claire uniforme fait 2500 mm de long, 300 mm de large et le plan de service est à 120 mm de hauteur, dimensions à (+/- 1 mm) Les pastilles au sol sont de couleurs rouge, verte, bleue et jaune et sont de formes rondes avec un diamètre de 60 mm Exigences de validation Ex.val1 Le robot doit pouvoir subir tous les tests pour répondre aux exigences du dossier Master EEAII-Reims 11

12 2. DOSSIER DE CONCEPTION ARCHITECTURALE DU SYSTEME EN SOUS- SYSTEMES 2.1. DESCRIPTION GENERALE (LOT 21) Notre prototype, nommé «Jack», est inspiré d un élévateur. Il abaisse son bras et avance pour enfourcher les pièces à manipuler, cette solution offre la possibilité de transporter, de déposer et de charger les pièces une par une ou deux par deux. C est aussi ce même bras qui ira lire les commandes clients grâce à son capteur photosensible embarqué. Le système de direction lui permet de tourner sur lui-même grâce à des chenilles, de façon à se centrer sur un point donné plus facilement. Les mouvements sont guidés par les capteurs à ultrason et de détection de couleurs. La ligne noire du plateau est indispensable au bon positionnement du robot, celle-ci est scrutée par le capteur de couleur qui donne au programme l information permettant un bon positionnement. Bras de levage. En premier lieu les solutions mécaniques ont été imaginées par une équipe de deux personnes et soumise à l ensemble du groupe. C est seulement à partir de ce moment que la phase de programmation a pu commencer. Deux langages ont été à l étude : Le langage LabView et le langage Mindstorms NXT. La mécanique a continué à évoluer en fonction des idées et des problèmes de programmation. Les équipes de synthèse ont elles effectuées leur travail en parallèle aux avancées techniques. Master EEAII-Reims 12

13 2.2. ARCHITECTURE FONCTIONNELLE ET COMPORTEMENTALE (LOT 22) Arborescence fonctionnelle statique Nous avons choisi d'illustrer l'ensemble des fonctions sous forme d'un tableau. Les fonctions sont décomposées en sous-fonctions qui aboutissent à une solution matérielle pour pouvoir les mettre en œuvre. Modifier l'état du robot Se déplacer Examiner l'environnement Initialiser Reprendre la mission Détecter fin de la mission Se mettre en veille Translation Rotation S'arrêter Détecter les pastilles Détecter les jetons Détecter la zone de repos Détecter les lignes de déplacement Positionner le robot Charger le programme Mettre sous tension le robot Traiter le programme Avancer Reculer Tourner a gauche Tourner a droite Détecter 1er client Détecter 2eme client Détecter bouteille rouge Détecter bouteille verte Détecter bouteille bleue Détecter commande identiques Détecter commande différentes Détecter commande unique Opérateur Capteur de pression Brique NXT Servomoteurs Capteur couleur Capteur Photosensible Capteur couleur Actionner bras Monter le bras Servomoteur 3 Descendre le bras Appréhender les perturbations Détecter la présence des obstacles Détecter l'obstacle Détecter l'évacuation de l'obstacle Capteur ultrason Master EEAII-Reims 13

14 Architecture fonctionnelle et dynamique L'architecture fonctionnelle dynamique est : Fig4.SADT général Fig5.Sous-systèmes représentés en SADT Master EEAII-Reims 14

15 2.3. ARCHITECTURE ORGANIQUE / PHYSIQUE (LOT 23) Arborescence organique / physique Description des constituants du système étudié, description des liens physiques (connexions ou Interfaces) Architecture organique / physique Fig6.Arborescence organique du système Diagramme d'architecture organique en sous-systèmes, incluant les liens ou connexions physiques. Fig7.Diagramme d'architecture organique Master EEAII-Reims 15

16 2.4. MOYENS CONSOMMES, UTILISES, PRODUITS (LOT 24) Pour la réalisation du fonctionnement du système, nous avons identifié les besoins suivants : Les entrées : - Ordinateur avec liaison USB et Bluetooth, - Logiciels (logiciel Lego - Labview), - Capteurs. Les moyens consommés : - Pièces Lego pour réaliser le robot, - Plateau (planches pieds réglables vis - scotch chatterton pastilles), - Piles ou batteries rechargeables de type AA/LR6 R 1,5V, - Chargeur de pile. Les sorties sont : L énergie dissipée par : - les servomoteurs, - les capteurs. La réalisation de la commande client s'organise de la façon suivante: - identifier la commande client, - se diriger vers le stock de boisson, - récupérer la ou les boissons correspondant à la (les) commande(s) identifiée(s), - se diriger vers le ou les clients, - servir la commande. Master EEAII-Reims 16

17 2.5. INTERFACES (LOT 25) Définition des interfaces externes au système Dans le tableau suivant est répertoriées toutes les interfaces extérieures au robot LEGO et le moyen d interaction de celui-ci avec ces éléments. Liens externes (interface physique) Contact : pression Contact : Chenille / Sol Lumière réfléchie sur le sol Ultrasons Contact : Produits/Bras articulé Contact : Aménagement des files d'encours / Sol de l atelier Contact : Aménagement des files d encours /produits Contact de branchement : Batterie/Chargeur de batterie Contact : Doigt/ Clavier Bluetooth Câble USB Constituants concernés Opérateur & Chef d'atelier Robot & Sol Capteur de couleur RGB & Sol Capteur ultrasonique & Obstacle Produits & Robot Aménagement des files d'encours & Sol de l'atelier Aménagement des files d encours & produits Batterie & Chargeur de batterie Doigt de l opérateur & clavier d un PC Port Bluetooth PC & Port Bluetooth Robot Port USB PC & Port USB Robot flux d'entrée/sortie Ordre du chef d'atelier pour démarrer (entrée) Effort de rotation (sortie) Effort de gravité et frottements (entrée) Eclairage de la zone de détection (sortie) Longueurs d onde renvoyées par le sol de l'atelier (entrée) Emission d ultrasons (sortie) Capteur d ultrasons réfléchis par l'obstacle (entrée) Effort de gravité et frottements (entrée) Effort de mobilisation des produits (sortie) Effort de gravité et frottements (entrée) Effort de frottement (entrée) Flux d énergie électrique (entrée) Ordre de téléguidage de l opérateur vers le PC (sortie) Commande de téléguidage du PC vers le Robot (entrée) Chargement du Programme depuis le PC dans le Robot (entrée) Master EEAII-Reims 17

18 Définition des interfaces internes au système Type de flux Description Fonctions Flux d'entré Signal du capteur de couleur permettant de suivre la ligne, ainsi Fonction Suiveur de ligne Fonction Rotation que situer les clients et les différentes boissons du magasin Programme maintenance Fonction sortie zone attente Flux d'entré Signal du capteur bouton poussoir permettant à l'utilisateur de lancer le robot dès lors qu'une commande est passée. Programme principal Flux d'entré Flux d'entré Flux de sortie Flux d'entrée/sortie Signal du capteur ultrason permettant l'arrêt du robot dès lors un obstacle se situe sur la trajectoire de celui-ci Signal du capteur photosensible permettant la lecture de la commande du (des) client(s) Signal analogique donnant la consigne aux différents moteurs lors de leur utilisation respective. Signal interne permettant de garder en mémoire la commande du (des) client(s) Toutes les fonctions hormis prise pièce et dépose pièce Fonction Lecture jeton Toutes les fonctions hormis prise pièce et dépose pièce Fonction Lecture jeton vers Fonction Chargement Master EEAII-Reims 18

19 2.6. DESCRIPTIONS FONCTIONNELLE ET ORGANIQUE DES SOUS SYSTEMES (LOT 26) Fig8.Diagramme A1 Master EEAII-Reims 19

20 Fig8.Diagramme A2 Fig8.Diagramme A3 Master EEAII-Reims 20
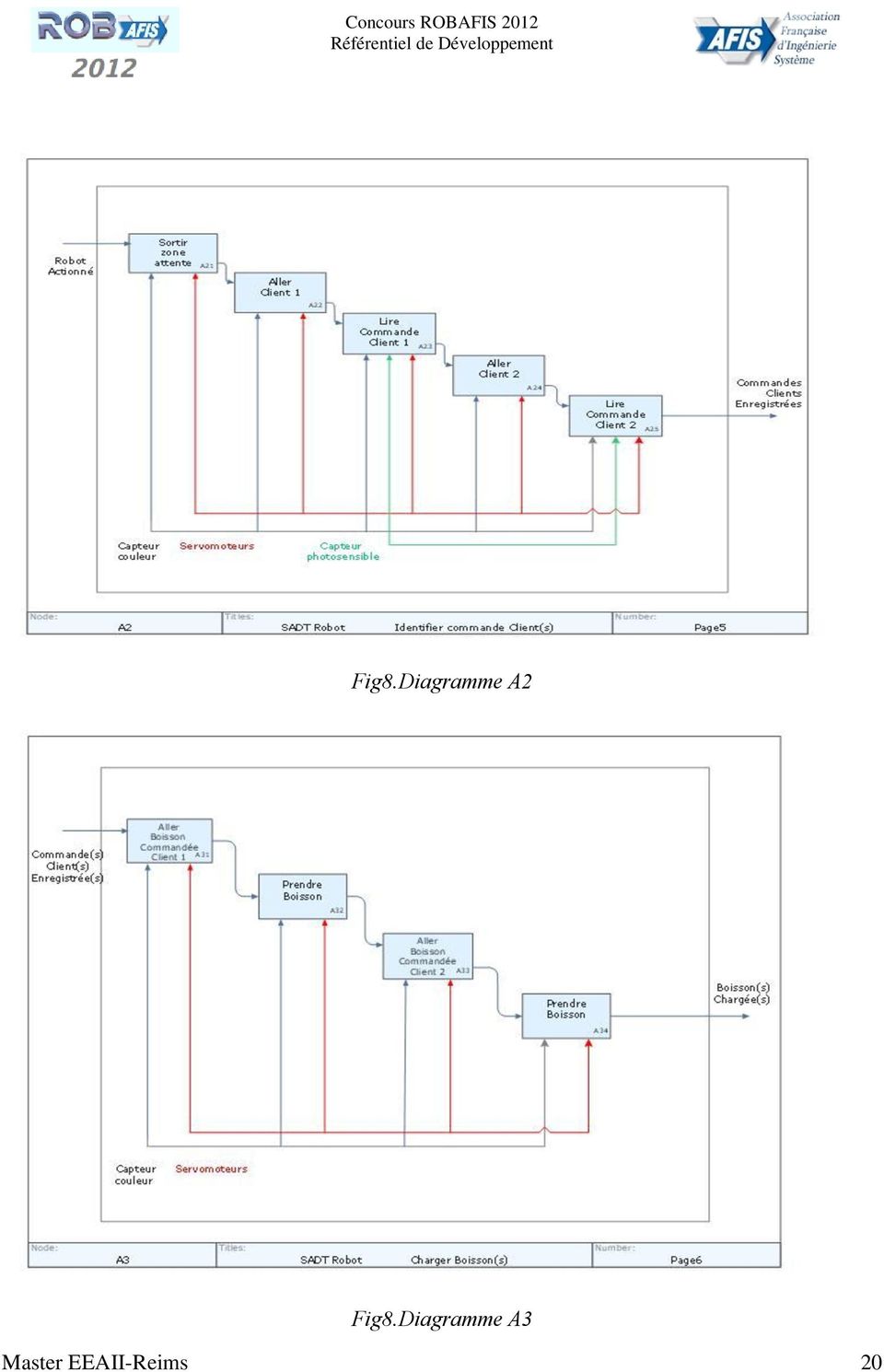
21 Fig8.Diagramme A3 Les images importées du logiciel Labview concernant la programmation sont disponibles en Annexe 1. Master EEAII-Reims 21
22 3. CONFIGURATION DE REFERENCE (LOT 30) 3.1. Nomenclature de définition du système Désignation article Qté Désignation article Qté BRIQUE NXT DOUBLE ANGULAR BEAM 3X SERVOMOTEUR 3 TECHNIC 5M BEAM 7 CAPTEUR ULTRASON 1 CROSS AXLE 9M 2 CAPTEUR PRESSION 1 CROSS AXLE 5M 1 CAPTEUR COULEUR 2 CROSS AXLE 3M 1 TECHNIC ANGULAR BEAM 3X7 2 CROSS BLOCK 90 2 TECHNIC 7M BEAM 2 CROSS BLOCK 3M 1 TECHNIC 9M BEAM 4 T-BEAM 3X3 W/HOLE Ø4.8 1 TECHNIC 11M BEAM 5 BUSH FOR CROSS AXLE 8 TECHNIC 13M BEAM 9 1/2 BUSH 6 CROSS AXLE 6M 1 2M CROSS AXLE W. GROOVE 4 CARTER DROIT 3M BEAM 1 CONN.BUSH W.FRIC. CROSSALE 11 CARTER GAUCHE 3M BEAM 1 CONNECTOR PEG W. FRICTION 3M 24 CHENILLE 2 CROSS AXLE 8M WITH END STOP 4 CONNECTOR PEG W. FRICTION 43 DOUBLE ANGULAR BEAM 3X CATCH W. CROSS HOLE 2 TECHNIC ANG. BEAM 3X TECHNIC CROSSBLOCK 2X3 1 TECHNIC ANG. BEAM 4X TECHNIC 15M BEAM 2 TECHNIC 3M BEAM 6 ANGULAR BEAM 90 W/4 SNAPS 4 CÂBLE 20CM 1 BEAM 3 M. W/4 SNAPS 3 CÂBLE 35CM 4 2M FRIC. SNAP W/CROSS HOLE 8 CÂBLE 50CM 2 TECHNIC CROSS BLOCK/FORK 2X2 2 TOTAL de pièces utilisés 201 RIM WIDE W.CROSS 30x20 4 Master EEAII-Reims 22
23 3.2. Schéma général d interconnexion électrique (puissance et commande-contrôle) Fig8.Schéma électrique d'interconnexion Connexion électrique et retour de l'information des capteurs au module NXT Connexion de puissance pour faire fonctionner les servomoteurs Master EEAII-Reims 23
24 3.3. Schéma de description de la chaîne cinématique Nous avons représenté grâce à différentes vue le robot de manière cinématique avec les liaisons mises en œuvre pour la réalisation de sa mission. Fig9.Vue de dessus du robot Partie inférieure de la pince Partie supérieure de la pince Châssis du robot Chenille et roue Servomoteurs Master EEAII-Reims 24
25 Fig10.Vue de droite du robot Partie prise de pièce Châssis du robot Ensemble chenille et roue Module NXT 3.4. Instructions d identification du système et de ses constituants Le robot est constitué de six parties distinctes : Le châssis. Le montant droit. Le montant gauche. Système de levage. Support NXT. Support Capteurs de direction. Master EEAII-Reims 25
26 Le Robot Vue d ensemble du robot. Image Le châssis Le châssis est la partie de base de notre robot. Il est constitué de deux servomoteurs qui actionnent deux arbres de transmission indépendants, qui vont à leur tour entrainer les chenilles. (fonction déplacement) Cette configuration de châssis Image Le montant droit Ce montant est une des fixations du de système de levage, qui permet de la fixer à la bonne hauteur. Image Master EEAII-Reims 26
27 Le montant gauche Ce montant est une des fixations du de système de levage, qui permet de la fixer à la bonne hauteur. Mais contient aussi le bouton de commande. Image Système de levage Le système de levage permet au robot d effectuer plusieurs mouvements avec l utilisation d un seul servomoteur. - Déploiement avant, arrière. - Levage haut, bas. - S incline pour mettre les cannettes en début de bras. Image Support NXT Il permet la fixation et le maintien, à bonne hauteur, du NXT Image Support Capteurs de direction Image Master EEAII-Reims 27
28 Cet élément à une triple fonctionnalité. D un côté, il va permettre de fixer le capteur ultrasons et le capteur de suivis de ligne, qui est décalé d un centimètre par rapport au milieu du robot. On évitera ainsi une approximation dû à la largeur de la ligne. D autre part, cela permet de soutenir la pince et donc de limiter le jeu à son extrémité. Pour finir cet élément est «déclipssable» pour permettre d ouvrir le robot et ainsi accéder au cœur du système facilement. (Dossier de maintenance) 4. DOSSIER JUSTIFICATIF (LOT 40) 4.1. DOSSIER JUSTIFICATIF DU CHOIX DE L ARCHITECTURE RETENUE (LOT 41) Les modèles décisionnels qui ont permis de sélectionner l'architecture retenue : * Déplacement : Nous avons opté pour les chenilles car elles permettent un déplacement stable et permettent une rotation dans un espace très restreint. * Saisie : Un bras en fourche a été adopté pour permettre une saisie simple de pièces avec un maintien unique de part et d'autre de la pièce. * Bras : Il est doté d'un renfort permettant une stabilité optimale lors de la saisie des bouteilles et permet avant tout d'être placé à une hauteur précise de 35 mm qui correspond à l'encoche des pièces. Il se lève (haut, bas), se déploie (avant, arrière) et penche en arrière ce qui permet de garder les bouteilles en butée au fond du bras et ainsi garantir une stabilité optimale tout au long du déplacement et ainsi connaître la position des bouteilles sur le bras même en cas de secousse. Cette solution nous permet ainsi de faire 3 mouvements avec un seul servomoteur. * Capteur couleur de lecture de commande : Le capteur a été fixé sur le bras pour permettre une lecture de commande en hauteur. Lors du déploiement du bras le capteur se déplace de manière à être au bord du bar et au-dessus de la commande permettant une lecture aisée du jeton. * Capteur couleur de suivi de ligne : Le capteur de suivi de ligne a été placé à l'avant du robot ce qui permet de détecter une pastille de couleur et de choisir l'action associée à réaliser. Il a été déporté d'un centimètre ce qui a Master EEAII-Reims 28
29 Opérateur Ultrason Capteur couleur Capteur Pression Brique NXT Capteur RGB Bras Chenilles Concours ROBAFIS 2012 pour effet de garder le robot centré sur la ligne mais aussi de poursuivre celle-ci avec une plus grande précision. Solutions non retenues : * Déplacement : * Saisie : Nous avons développé une pince mais la prise de deux pièces est impossible. Nous avons aussi développé un cavalier portuaire mais le système ne convient pas à cause de la hauteur des bouteilles. Ce qui cause un dépassement des limitations de hauteur du robot. * Capteur couleur et photosensible : Concernant les capteurs, celui positionné sur le bras permettant de lire la commande doit détecter 3 couleurs différentes et celui disposé au sol doit détecter 6 couleurs différentes. Le capteur photosensible fonctionnant sur des niveaux de gris, nous ne l avons pas donc pas retenu pour le suivi de ligne, ayant ainsi moins de couleurs à détecter. Les techniques de pince et de cavalier portuaire n'ont pas étaient retenu car non faisable à cause de la différence de hauteur (plateau comptoir) 4.2. DOSSIER JUSTIFICATIF DE LA CONCEPTION (LOT 42) Dans le tableau ci-dessus, nous pouvons voir par rapport aux exigences les solutions que nous avons retenues. Nous avons bien répondu à chaque exigence fixée au début du projet. Référence Description Ex.fc1-1 Le robot se déplace dans le bar de la cafétéria x x x x Ex.fc1-2 Le robot détecte les pastilles au sol x x Ex.fc1-3 Le robot détecte les jetons des clients x x x Ex.fc2-1 Le robot se dirige vers l'étagère de boissons x x x x Ex.fc2-2 Le robot saisie les boissons répondant aux commandes des clients x x x Ex.fc2-3 Le robot doit pouvoir déplacer une ou plusieurs boissons x x x Ex.fc3-1 Le robot doit déposer les boissons devant les clients sur le comptoir x x x x x Ex.fc4-1 Le robot doit prendre une commande unique de boisson par client x x x x x x Master EEAII-Reims 29
30 Ex.fc4-2 Le robot doit prendre une commande simultanée de deux boissons par deux clients x x x x x x Ex.fc5 Le robot rejoint la zone de repos et s'arrête x x x x Ex.fc6 Le robot se déplace de manière autonome x x x x Ex.fc7 Le robot doit détecter les obstacles et s'arrêter x x Ex.prf1 Le robot doit pouvoir réaliser 3 épreuves successives de service sur une période de service maximale de 4 x heures Ex.prf2 Le robot doit effectuer sa mission en maximum 4 minutes x Ex.prf3 Le robot doit avoir une autonomie lui permettant de réaliser les 3 épreuves de 4 heures au maximum x Ex.prf4 Ex.prf5 Ex.int1 Ex.int2 Ex.op1 Ex.op2 Ex.op3 Ex.erg1 Ex.erg2 Ex.sf1 Ex.sf2 Les boissons devront être contenues dans les zones situées devant les clients en position verticale Le robot doit être capable de réaliser un service de 12 commandes par jour sur une durée de 8 heures L'opérateur lance le démarrage de la mission du robot par une pression sur un capteur Seul l'opérateur peut évacuer l'obstacle présent sur le chemin du robot Le robot est en fonctionnement normal ou alors il est en veille Le robot est en veille dans sa position de repos ou quand il y a détection d'un obstacle. Le robot est en fonctionnement normal le reste du temps Quand le robot termine sa mission, il doit pouvoir être relancé grâce à un simple appuie sur son capteur de pression Le robot doit être facilement préhensible Le robot doit pouvoir s'arrêter en présence d'un obstacle et attendre son évacuation Le robot doit être opérationnel à tout moment tout en respectant le cahier des charges x x x x x x x x x x x x x x x x x x x x x Ex.sf3 Le système est maintenable pendant et hors épreuves x Ex.stock_trans1 Ex.stock_trans2 Le robot est transportable du lieu de conception au lieu du concours RobAFIS Le robot doit transporter les boissons sans que cellesci ne touchent le sol x x x Fig13.Matrice d'allocation et de traçabilité x x x x x x x x x x x x Master EEAII-Reims 30
31 Sous système de déplacement : Solutions Chenilles Quatre roues Nous avons retenu les chenilles. Elles offrent une meilleure stabilité et des rotations dans un espace restreint. Nous avons retenu cette solution malgré que les roues offrent un meilleur confort en termes de rapidité. Sous système de préhension : Bras Solutions Cavalier portuaire Pince La solution retenue est celle du bras du fait de sa simplicité de mise en œuvre. La pince ne pouvait pas être fixée à bonne hauteur et le cavalier portuaire ne permettait pas de prendre plusieurs bouteilles en même temps. C'est pourquoi la solution d'un bras en forme de fourche a été retenu. Sous système de guidage : Solutions Capteur à l'arrière Capteur à l'avant Capteur centré Capteur excentré Nous avons choisi de placer le capteur à l'avant et de manière excentrée, pour plusieurs raisons. Le capteur à l'arrière ne permettait pas une régulation de trajectoire optimale contrairement au placement avant du capteur. Le centrage du capteur fait que le robot n'est pas centré sur la ligne et provoque une instabilité lors du suivi de ligne. Nous avons mesuré un écart d'un centimètre par rapport à la bande noire. L'excentration du capteur permet au robot d'être centré sur la ligne et ainsi de faire ses manœuvres sans avoir un écart entre la bande et le robot, ce qui permet de faire les déplacements avec une plus grande précision. Sous-système de commande : Ce sous système est composé du bloc NXT2.0 et de câbles de communications, ces éléments sont imposés. En revanche nous avons le choix d'alimentation et de programmation. Nous avons donc choisi de prendre 6 piles rechargeables pour effectuer nos tests et nous prendrons des piles type standard pour alimenter le module le jour du concours. Nous avons aussi le choix du langage de programmation. A ce jour le langage LEGO est opérationnel cependant nous avons aussi utilisé le langage LabView. Des futurs tests de performance seront réalisés par la suite. Master EEAII-Reims 31
32 5. PLAN D'INTEGRATION VERIFICATION VALIDATION (LOT 50) 6. DOSSIER D ETUDE DE MAINTENABILITE - DEFINITION DE LA MAINTENANCE 6.1. DOSSIER D ETUDES DE MAINTENABILITE (LOT 61) Réf. Ensemble des scénarios propre aux opérations de maintenance. 1 Panne sur servomoteur droit. 2 Panne sur servomoteur gauche. 3 Panne sur servomoteur du bras. 4 Panne du capteur photosensible. 5 Panne du capteur de couleurs. 6 Panne du capteur à ultrasons. 7 Panne du bouton poussoir. 8 Bug programme. 9 Rupture d une pièce. Master EEAII-Reims 32
33 10 Désolidarisation d une ou plusieurs pièces. 11 Blocage du bras en position basse. 12 NXT en panne. 13 Batterie / piles déchargée(s) PLAN DE MAINTENANCE ET (LOT 62) Réf Maint_1 Maint_2 Maint_3 Maint_4 Maint_5 Maint_6 Description Test du capteur Bouton poussoir Test du capteur de couleur Test du capteur ultrason Test du capteur photosensible Test des servomoteurs Gauche et Droite Test du servomoteur du bras Le programme Maintenance exécuté à la fin de l audit afin de vérifier tous défauts concernant le robot est décrit en Annexe 2. La partie maintenance curative est présentée dans la fiche suivante FICHES DE MAINTENANCES (LOT 63) Eléments permettant le démontage des différentes parties : - 3.1, 3.2, 2.1 et 2.2 : permet de désolidariser le bras de levage du robot et 1.2 : permet de retirer les deux montants gauche et droit accompagnés du support de capteur du châssis. Master EEAII-Reims 33
34 Panne sur Réf n 1 servomoteur droit Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le servomoteur et sur le port B du module NXT. - Vérifier l intégrité du câble de connexion. - Démonter puis changer le servomoteur droit si nécessaire. Test et démontage/remontage/réglage Composant(s) nécessaire(s) : Câble connexion servomoteur droit et/ou servomoteur. Temps d intervention : 8min Réf n 2 Panne sur servomoteur gauche Composant(s) nécessaire(s) : Câble connexion servomoteur gauche et/ou servomoteur. Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le servomoteur et sur le port A du module NXT. - Vérifier l intégrité du câble de connexion. - Changement du servomoteur gauche. Test et démontage/remontage/réglage Temps d intervention : 8min Réf n 3 Panne sur servomoteur bras Composant(s) nécessaire(s) : Câble connexion servomoteur bras et/ou servomoteur. Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le servomoteur et sur le port C du module NXT. - Vérifier l intégrité du câble de connexion. - Changement du servomoteur. Test et démontage/remontage/réglage Temps d intervention : 4min30sec Master EEAII-Reims 34
35 Réf n 4 Panne du capteur photosensible Composant(s) nécessaire(s) : Câble connexion capteur photosensible et/ou capteur photosensible. Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le capteur et sur le port 4 du module NXT. - Vérifier l intégrité du câble de connexion. - Changement du capteur. Test et démontage/remontage/réglage Temps d intervention : 1min Réf n 5 Panne du capteur de couleurs Composant(s) nécessaire(s) : Câble connexion capteur de couleurs et/ou capteur de couleurs Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le capteur et sur le port 2 du module NXT. - Vérifier l intégrité du câble de connexion. - Changement du capteur. Test et démontage/remontage/réglage Temps d intervention : 5min Réf n 6 Panne du capteur à ultrasons Composant(s) nécessaire(s) : Câble connexion capteur à ultrasons et/ou capteur à ultrasons. Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le capteur et sur le port 3 du module NXT. - Vérifier l intégrité du câble de connexion. - Changement du capteur. Test et démontage/remontage/réglage Temps d intervention : 6min30sec Master EEAII-Reims 35
36 Réf n 7 Panne du bouton poussoir Composant(s) nécessaire(s) : Câble connexion bouton poussoir et/ou bouton poussoir. Mode opératoire : - Stopper le programme en cours. - Vérification des connexions sur le capteur et sur le port 1 du module NXT. - Vérifier l intégrité du câble de connexion. - Changement du capteur. Test et démontage/remontage/réglage Réf n 8 Bug programme Mode opératoire : - Relancer le programme en plaçant le robot en position initiale - Si répétition : Recharger le programme dans le module NXT. Test et démontage/remontage/réglage Temps d intervention : 1min Composant(s) nécessaire(s) : Câble connexion NXT ou clef Bluetooth, Ordinateur, programmes et outils de programmation. Image non disponible Temps d intervention : Variable suivant le temps de chargement du programme Réf n 9 Rupture d une pièce Composant(s) nécessaire(s) : Pièce à changer Mode opératoire : - Stopper le programme en cours. - La pièce doit être remplacée en utilisant le plan de construction. Image non disponible Test et démontage/remontage/réglage Désolidarisation d une Réf n 10 ou plusieurs pièces Mode opératoire : - Stopper le programme en cours. - Les éléments doivent être repositionnés en se référant au plan de construction. Test et démontage/remontage/réglage Temps d intervention : Variable suivant la pièce à changer Composant(s) nécessaire(s) : aucun si la pièce en cause n a pas de défaut. Sinon changer la pièce. Image non disponible Temps d intervention : Variable suivant la pièce ou les pièces à changer Master EEAII-Reims 36
37 Blocage du bras en Réf n 11 position basse Mode opératoire : - Assister manuellement le bras pour sa remonté tout en maintenant les éventuelle bouteilles présente sur le bras. Test et démontage/remontage/réglage Composant(s) nécessaire(s) : aucun. Image non disponible Temps d intervention : 5sec Réf n 12 NXT en panne Composant(s) nécessaire(s) : aucun. Mode opératoire : - Eteindre le module NXT en retirant la batterie ou les piles. Image non disponible - Replacer la batterie ou les piles Test et démontage/remontage/réglage Batteries / piles Réf n 13 déchargée(s) Mode opératoire : - Stopper le programme en cours. - Changement de la batterie / des piles. Test et démontage/remontage/réglage Temps d intervention : 1min30sec Composant(s) nécessaire(s) : aucun. Image non disponible Temps d intervention : 1min30sec 6.4. VALIDATION DU PLAN DE MAINTENANCE (LOT 64) A l issu des tests de maintenance préventive et des actions de maintenance curative, le plan de maintenance est alors validé. Il sera alors possible de remplacer une pièce à tout moment. Master EEAII-Reims 37
38 7. MANAGEMENT DU PROJET 7.1. ORGANISATION ET SUIVI DE PROJET (LOT 71) Liste des jalons et attendus des points clés du projet Le projet Robafis s articule autour de trois axes principaux : - L inscription au concours, - L étude et le développement du projet, - Le concours et la présentation du projet devant le jury. Ci-dessous sont présentées, les dates de début ou de fin de chacune des phases : Référence Description Date J1 Inscription Concours RobAFIS 21/09/2012 (début) J2 Réception des kits Lego Phase d étude 12/10/2012 (début) et développement J3 Envoi du dossier de développement 18/11/2012 (fin) J4 Concours Robafis 27/11/2012 (fin) Master EEAII-Reims 38
39 WBS et OT Fig14.WBS Master EEAII-Reims 39
40 01/11/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /10/ /09/ /09/ /09/ /09/ /09/ /09/2012 Concours ROBAFIS Calendrier prévisionnel et constat Date Connaissance Concours Cours / Méthodologie et Conception I.S./ TP Récupération documents TP Etude du projet Réception Robot et pièces boissons Conception plateau Construction du robot Budget hôtel sponsor calendrier Master EEAII-Reims 40
41 Réunion périodique Programmation Test / Maintenance Master EEAII-Reims 41
42 7.1.4 Bilan des points d avancement intermédiaire (synthétique) Revue initiale (28/09/12) Objectif de la réunion : a- Présentation du concours RobAFIS 2012 Après la présentation du concours RobAFIS, notre équipe a pris connaissances du cahier des charges ainsi que le règlement appliqué à ce concours. Un chef de projet nommé, sera responsable de superviser le projet et sera le référent pour piloter les différents groupes de travail. Un planning de réunion est établi afin de fixer les axes de travail hebdomadaire, de suivre l avancée de chacun des groupes, mais aussi de faire remonter les difficultés rencontrées au cours de l étude. Revue 2 (5/10/2012) Objectif de la réunion : - Constitution des groupes de travail, - Lancement de la phase de développement. Organisation des groupes de travail selon les domaines de compétences de chacun des candidats du projet : - Groupe construction robot - Groupe construction plateau - Groupe finance - Groupe programmation robot - Groupe développement Ingénierie Système Le groupe finance a commencé à prospecter les directions à entreprendre. Le groupe construction plateau, après avoir déterminé toutes les cotes de l environnement de travail, à lancé la commande des éléments constituant le plateau. Revue 3 (12/10/2012) Objectif de la réunion : - Mise en commun sur l avancée des différents groupes. Master EEAII-Reims 42
43 Le groupe développement a étudié et présenté les besoins, exigences et contraintes du robot, de son environnement d exécution. Il a ainsi commencé la définition des spécifications et des modes de fonctionnements. Le groupe programmation robot a déterminé les environnements utilisés pour la programmation du robot qui sont les suivants : - «Mindstorms 2.0» - «Labview» Dans un premier temps il identifie et détaille les différentes fonctionnalités du robot. Revue 4 (19/10/2012) Objectif de la réunion : - Mise en commun sur l avancée des différents groupes. Après la phase d étude préalable, le groupe programmation robot a établie l organigramme fonctionnel. Le groupe construction plateau a reçu les différents éléments constituants le plateau et commence la réalisation de dernier. Revue 5 (26/10/2012) Objectif de la réunion : - Mise en commun sur l avancée des différents groupes. Le groupe construction robot conçoit à présent l architecture du robot à travers différentes structures (ex : robot à chenille ou robot à roue). Dans cette première partie le groupe test aussi les différents éléments comme les capteurs, servomoteurs. Le groupe programmation prenne en main d un côté le logiciel mindstorms 2.0, pour en avoir une approche. Et de l autre, il conçoit la programmation sur labview. Le groupe construction plateau poursuit sa réalisation. Revue 6 (09/11/2012) Objectif de la réunion : - Mise en commun sur l avancée des différents groupes. Master EEAII-Reims 43
44 7.1.5 Compte-rendu de Revue interne de fin de Développement Objectif de la réunion (15/11/12) : - Finalisation du projet - Clôture et validation de la partie développement. - Management des risques. Relecture complète du dossier avant validation et envoi PILOTAGE PAR LA QUALITE, LES COUTS ET LES DELAIS (LOT 72) Études d'analyse de la valeur réalisées relatives au coût du produit et au coût de son développement Fig11.Développement du projet en heure Dans ce graphique, nous pouvons distinguer trois parties distinctes : - Phase de compréhension du projet, dans cette partie, nous étudions en profondeur le cahier des charges, le référentiel de développement, les FAQ et tous les autres documents se rapportant au concours. - Phase de conception robot et programme, l une des grandes parties du projet, elle Master EEAII-Reims 44

45 cumule 70h de travaux à eux deux, ce qui représente plus de 86% du développement total du projet. - Phase de conception du dossier, cette dernière partie comprend toute la partie ingénierie système du projet. Fig12.Coûts du robot par sous-système (%) A la vue de ce graphique, nous pouvons constater que le sous-système le plus coûteux est celui de déplacement, suivi de près par les sous-systèmes de préhension et d entrée. Ensuite, nous avons le sous-système de commande. En dernier, nous avons le reste de la conception du robot, cette dernière partie n est qu optionnelle (esthétique). Master EEAII-Reims 45
46 7.2.2Fourniture de la courbe d évolution des consommations sur budget de développement Heure de travail/jour Jours Fig8.Diagramme représentants les coûts en fonction des semaines Dans cette courbe, nous étudions les heures de travail effectuées par les différents protagonistes : - Dans un premier temps, nous avons le Chef de projet distribuant les tâches aux autres personnes. - Dans un second temps, nous avons le Maitre d ouvrage fixant les objectifs, l enveloppe budgétaire et les délais souhaités pour le projet. - Dans un troisième temps, nous avons le Maitre d œuvre assurant la conception et le contrôle de la réalisation de l ouvrage. Au vue de la courbe, nous pouvons constater que le Maitre d ouvrage est celui ayant le plus de travail. Nous démontrons donc que c est le poste clé entre ces trois personnes. Dans cette partie, nous étudions l évolution des coûts pendant toute la durée du projet : Master EEAII-Reims 46
47 Evolution des coûts (%) Fig12.Evolution des coûts (%) D après cette courbe, nous pouvons voir que la plus grande partie du coût de la conception du robot a été effectué durant les premières semaines (92% en quatre semaines). Ce résultat est logique car la conception du robot doit être réalisée en premier avant de pouvoir enchainer sur la programmation. La programmation est la tâche qui prend le plus temps contenu du lapse de temps restant après la conception du robot Fourniture de la courbe d évolution du coût unitaire du produit Dans cette partie, nous étudions l évolution des coûts pendant toute la durée du projet : Tableau coûts système : Réf. Désignation Qtés. Coût unitaire Coût total BRIQUE NXT SERVOMOTEUR CAPTEUR ULTRASON CAPTEUR PRESSION CAPTEUR COULEUR TECHNIC ANGULAR BEAM 3X TECHNIC 7M BEAM TECHNIC 9M BEAM Master EEAII-Reims 47
48 TECHNIC 11M BEAM TECHNIC 13M BEAM CROSS AXLE 6M CARTER DROIT 3M BEAM CARTER GAUCHE 3M BEAM CHENILLE CONNECTOR PEG W. FRICTION CATCH W. CROSS HOLE TECHNIC CROSSBLOCK 2X TECHNIC 15M BEAM ANGULAR BEAM 90 W/4 SNAPS BEAM 3 M. W/4 SNAPS M FRIC. SNAP W/CROSS HOLE TECHNIC CROSS BLOCK/FORK 2X RIM WIDE W.CROSS 30x DOUBLE ANGULAR BEAM 3X TECHNIC 5M BEAM CROSS AXLE 9M CROSS AXLE 5M CROSS AXLE 3M CROSS BLOCK CROSS BLOCK 3M T-BEAM 3X3 W/HOLE Ø BUSH FOR CROSS AXLE /2 BUSH M CROSS AXLE W. GROOVE CONN.BUSH W.FRIC. CROSSALE CONNECTOR PEG W. FRICTION 3M CROSS AXLE 8M WITH END STOP DOUBLE ANGULAR BEAM 3X TECHNIC ANG. BEAM 3X TECHNIC ANG. BEAM 4X TECHNIC 3M BEAM CÂBLE 20CM CÂBLE 35CM CÂBLE 50CM TOTAL de pièces utilisés 201 Coût TO- TAL 276 Master EEAII-Reims 48
49 7.3. MANAGEMENT DES RISQUES (LOT 73) Type de risque Risque identifié Conséquence Cause possible Correction Humain Mauvaise préparation Echec du projet Humain Mauvais rapport entre les personnes du groupe Echec/retard Humain Absentéisme Retard du projet Organisationnel Technique Retard de livraison du dossier/poster Mauvais montage du robot Pénalité Technique Capteur défaillant Echec Technique Technique Technique Bug logiciel Robot ne suit pas la ligne noire au sol Robot fait une mauvaise rotation Echec / pénalité Echec Echec Echec -Surcharge de travail -Problème de communication -Manque d expérience -Divergence d idées -Mauvaise communication -Maladie -Manque de motivation -Surcharge de travail -Mauvaise organisation -Mauvais planning -Mauvaise préparation des pièces -Notice peu claire -robot trop complexe -Mauvais traitement du capteur -Mauvaise utilisation -Choc -Mauvais environnement -Mauvais algorithme -Programme volumineux -Mauvaise comptabilité (entre logiciel et NXT) -Défaillance du capteur RGB -Erreur dans le programme -Défaillance du capteur RGB -Erreur dans le programme -Préparation rigoureuse au concours -Personne motivée -Communication entre les membres -Gérer les conflits -Gérer son temps de travail -Bonne répartition du travail -Communiquer régulièrement avec l ensemble du groupe (réunion, facebook, skype) -Organiser le travail (calendrier prévisionnel) -Pièce trié par petit groupe -Plan clair et détaillé -Robot le plus simple possible -Test de bon fonctionnement des capteurs avant l épreuve. -Regarder les plages d utilisation des capteurs -Tester tous les cas possible (ex : toute les commandes possibles) -Optimisation de l algorithme -Relecture du programme par différents membres -Test du capteur -Test du programme -Test du capteur -Test du programme Technique Piles trop faible Pénalité -Piles déchargé -Contrôler le niveau des piles -Prévoir des piles de rechange Technique Obstacle sur le chemin du robot Echec -Pièce tombé de la fourche -Capter la pièce grâce au capteur a ultrason Technique (Développement) Baisser la fourche a la mauvaise hauteur pour attraper les pièces Echec/pénalité -Niveau de pile trop faible -Suivant la pièce que l on a attrapée -Rajouter des pièces à l extrémité de la fourche (pour toujours avoir la bonne hauteur) Technique (Développement) Mauvaise accessibilité du NXT Perte de temps -Elément devant le NXT (barre, capteur, moteur) -Rajout d une barre en dessous du NXT pour le surélever et avoir accès facile aux piles Master EEAII-Reims 49
50 8. DOSSIER DE REALISATION (LOT 80) Le montage s effectue grâce aux plans des différents éléments donnés en Annexe 3, ces plans ont été réalisé pour des personnes confirmées et rigoureuses. Ce document sera fourni au format papier sous plusieurs exemplaires de manière à simplifier le montage en équipe de trois. Les instructions ont été réalisées à l aide des logiciels «Lego Digital Designer» et «Photofiltre». Master EEAII-Reims 50
51 9. ANNEXES 9.1. Programmation programme principal Fig1. Programme principal Master EEAII-Reims 51
52 Fig2. Sortie zone Attente Master EEAII-Reims 52
53 Fig3. Suivre ligne Master EEAII-Reims 53
54 Fig4. Rotation Master EEAII-Reims 54
55 Fig5. Tourne Master EEAII-Reims 55
56 Fig6. Lecture jeton Master EEAII-Reims 56
57 Fig7-1. Chargement Master EEAII-Reims 57
58 Fig7-2. Chargement Master EEAII-Reims 58
59 Fig7-3. Chargement Master EEAII-Reims 59
60 Fig8. Prise pièce Master EEAII-Reims 60
61 Fig9. Dépose pièce Master EEAII-Reims 61
62 9.2. Programmation programme Maintenance SADT Master EEAII-Reims 62
Informations produits scalamobil S35 scalacombi S36
 Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
AUTOPORTE III Notice de pose
 AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
Aperçu. S35 Franchir les escaliers en toute sécurité.
 Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
NXT Guide de mise en route. Rob Widger
 NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
ROTOLINE NOTICE DE POSE
 ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
Projet Robot Centaure
 Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
CYLINDRE ET BÉQUILLE ÉLECTRONIQUES À BADGE Aperio E100 & C100
 SYSTÈMES D IDENTIFICATION CYLINDRE ET BÉQUILLE ÉLECTRONIQUES À BADGE Aperio E100 & C100 CONTRÔLE D ACCÈS SANS FIL RFID Contrôle des portes en temps réel. Fonctionnalités Aperio : le chaînon manquant grâce
SYSTÈMES D IDENTIFICATION CYLINDRE ET BÉQUILLE ÉLECTRONIQUES À BADGE Aperio E100 & C100 CONTRÔLE D ACCÈS SANS FIL RFID Contrôle des portes en temps réel. Fonctionnalités Aperio : le chaînon manquant grâce
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Création d une application Android (APPInventor)
") 1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
KIT SOLAIRE EVOLUTIF DE BASE
 PARALLELE ENERGIE KIT SOLAIRE EVOLUTIF DE BASE Ce kit solaire est un système solaire facile à utiliser. Il s agit d un «générateur solaire» qui convertit la lumière du soleil en électricité, et qui peut
PARALLELE ENERGIE KIT SOLAIRE EVOLUTIF DE BASE Ce kit solaire est un système solaire facile à utiliser. Il s agit d un «générateur solaire» qui convertit la lumière du soleil en électricité, et qui peut
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988)
") Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988) Le système d alerte centralisée de la 928 est destiné a présenter au conducteur toute anomalie de fonctionnement
Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988) Le système d alerte centralisée de la 928 est destiné a présenter au conducteur toute anomalie de fonctionnement
Appareil de type fauteuil monte-escalier
 modèle 80 Appareil de type fauteuil monte-escalier Fonctionne sur batteries points de chargement en haut et en bas, alarme sonore si l'appareil n'est pas stationné sur le plot de chargement. Programmation
modèle 80 Appareil de type fauteuil monte-escalier Fonctionne sur batteries points de chargement en haut et en bas, alarme sonore si l'appareil n'est pas stationné sur le plot de chargement. Programmation
Avec le fauteuil monte-escalier Otolift, vivez confortablement dans votre maison!
 Avec le fauteuil monte-escalier Otolift, vivez confortablement dans votre maison! Le fauteuil monte-escalier Otolift Le fauteuil monte-escalier Otolift a été réellement conçu pour l'utilisateur. Aussi
Avec le fauteuil monte-escalier Otolift, vivez confortablement dans votre maison! Le fauteuil monte-escalier Otolift Le fauteuil monte-escalier Otolift a été réellement conçu pour l'utilisateur. Aussi
UP 588/13 5WG1 588-2AB13
 Informations Technique Description du produit et de ses fonctionnalités Dans le menu «Réglage» vous avez le choix entre 4 styles d affichage. Les accessoires suivants sont nécessaires: è è è 5WG1 588 8AB14
Informations Technique Description du produit et de ses fonctionnalités Dans le menu «Réglage» vous avez le choix entre 4 styles d affichage. Les accessoires suivants sont nécessaires: è è è 5WG1 588 8AB14
Baccalauréat Professionnel. Microtechniques. Session 2012 DOSSIER TECHNIQUE (DT)
") Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Atelier B : Maintivannes
 Atelier B : Maintivannes BMA03 : Procédure de réglage de la vanne de régulation CAMFLEX BMA03 : Procédure de réglage de la vanne CAMFLEX Page 1 Buts de l exercice : - Réaliser la manutention d un élément
Atelier B : Maintivannes BMA03 : Procédure de réglage de la vanne de régulation CAMFLEX BMA03 : Procédure de réglage de la vanne CAMFLEX Page 1 Buts de l exercice : - Réaliser la manutention d un élément
BTS SYSTEMES ELECTRONIQUES
 BTS SYSTEMES ELECTRONIQUES E 6-2 PROJET TECHNIQUE Groupement inter académique Besançon, Dijon, Grenoble, Lyon Dossier de présentation et de validation du sujet de projet Groupement académique : BESANCON
BTS SYSTEMES ELECTRONIQUES E 6-2 PROJET TECHNIQUE Groupement inter académique Besançon, Dijon, Grenoble, Lyon Dossier de présentation et de validation du sujet de projet Groupement académique : BESANCON
Utilisation du visualiseur Avermedia
 Collèges Numériques Utilisation du visualiseur Avermedia Un visualiseur est aussi appelé caméra de table et ce nom rend mieux compte de sa fonction première à savoir filmer un document (revue,carte, dissection,
Collèges Numériques Utilisation du visualiseur Avermedia Un visualiseur est aussi appelé caméra de table et ce nom rend mieux compte de sa fonction première à savoir filmer un document (revue,carte, dissection,
Monte-escaliers électriques
 Monte-escaliers électriques LIFTKAR PT Fiable, polyvalent, ingénieux Que vous soyez un utilisateur de fauteuil roulant, une personne à mobilité réduite, une aide à domicile ou un professionnel de santé
Monte-escaliers électriques LIFTKAR PT Fiable, polyvalent, ingénieux Que vous soyez un utilisateur de fauteuil roulant, une personne à mobilité réduite, une aide à domicile ou un professionnel de santé
Nom-Projet MODELE PLAN DE MANAGEMENT DE PROJET
 Nom-Projet MODELE PLAN DE MANAGEMENT DE PROJET Glossaire La terminologie propre au projet, ainsi que les abréviations et sigles utilisés sont définis dans le Glossaire. Approbation Décision formelle, donnée
Nom-Projet MODELE PLAN DE MANAGEMENT DE PROJET Glossaire La terminologie propre au projet, ainsi que les abréviations et sigles utilisés sont définis dans le Glossaire. Approbation Décision formelle, donnée
Ecran programmable. Testez la différence grâce. à sa puissance, sa rapidité. et ses possibilités réseaux
 Ecran programmable Testez la différence grâce à sa puissance, sa rapidité et ses possibilités réseaux Gamme de Produits Compact & hautement fonctionnel Pouces Couleurs Rétro éclairage 3 Ports série Maitre/
Ecran programmable Testez la différence grâce à sa puissance, sa rapidité et ses possibilités réseaux Gamme de Produits Compact & hautement fonctionnel Pouces Couleurs Rétro éclairage 3 Ports série Maitre/
GUIDE D'INSTALLATION. Lave-Vaisselle
 GUIDE D'INSTALLATION Lave-Vaisselle SOMMAIRE 1/ CONSIGNES DE SECURITE Avertissements importants 03 2/ INSTALLATION DE VOTRE LAVE-VAISSELLE Appareil non encastré 04 Appareil encastré 04 Appareil encastré
GUIDE D'INSTALLATION Lave-Vaisselle SOMMAIRE 1/ CONSIGNES DE SECURITE Avertissements importants 03 2/ INSTALLATION DE VOTRE LAVE-VAISSELLE Appareil non encastré 04 Appareil encastré 04 Appareil encastré
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
Guide d Utilisation :
 Guide d Utilisation : Fauteuil élévateur pour escalier droit E120 / D160 SOMMAIRE Ce monte escalier est conçu pour être utilisé par une personne seulement lors des déplacements. Une mauvaise utilisation
Guide d Utilisation : Fauteuil élévateur pour escalier droit E120 / D160 SOMMAIRE Ce monte escalier est conçu pour être utilisé par une personne seulement lors des déplacements. Une mauvaise utilisation
UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX
 UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX PLAN
UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX PLAN
Travaux de rénovation partielle de bureaux et de laboratoires
 Travaux de rénovation partielle de bureaux et de laboratoires Centre de recherche Saint Antoine UMR-S 893 Site de l Hôpital Saint Antoine Bâtiment Inserm Raoul KOURILSKY 6 ème étage Equipe 13 Alex DUVAL
Travaux de rénovation partielle de bureaux et de laboratoires Centre de recherche Saint Antoine UMR-S 893 Site de l Hôpital Saint Antoine Bâtiment Inserm Raoul KOURILSKY 6 ème étage Equipe 13 Alex DUVAL
Outil d autodiagnostic du niveau d accessibilité - Les cabinets médicaux -
 Outil d autodiagnostic du niveau d accessibilité - Les cabinets médicaux - 17 septembre 2014 (mis à jour le 31 octobre 2014) Afin d avoir une idée du niveau d accessibilité de son cabinet et des principales
Outil d autodiagnostic du niveau d accessibilité - Les cabinets médicaux - 17 septembre 2014 (mis à jour le 31 octobre 2014) Afin d avoir une idée du niveau d accessibilité de son cabinet et des principales
Module de mesure de courant pour relais statiques serie HD Module de mesure de courant HD D0340I
 Plage de tension de commande: 4... 30 VDC Plage de courant de charge: 2 A... 40 A Controle permanent de courant Apprentissage du courant de consigne par bouton poussoir ou par entrée externe Seuil d'alarme
Plage de tension de commande: 4... 30 VDC Plage de courant de charge: 2 A... 40 A Controle permanent de courant Apprentissage du courant de consigne par bouton poussoir ou par entrée externe Seuil d'alarme
Détecteur de fumée. ALIMENTATION par pile 9V Communication. Modèle Ei 605C Optique. Description du produit. Fonctionnement
 Détecteur de fumée ALIMENTATION par pile 9V Communication Modèle Ei 605C Optique Haute sensibilité répond à tous les feux standards Esthétique, compact Conception novatrice et robuste de la chambre optique
Détecteur de fumée ALIMENTATION par pile 9V Communication Modèle Ei 605C Optique Haute sensibilité répond à tous les feux standards Esthétique, compact Conception novatrice et robuste de la chambre optique
Manuel de l utilisateur
 Manuel de l utilisateur 1 Prenez le temps de lire ce manuel afin de profiter au mieux de votre matériel. Le Wikango XL est un assistant d aide à la conduite : il doit vous inciter à respecter le Code de
Manuel de l utilisateur 1 Prenez le temps de lire ce manuel afin de profiter au mieux de votre matériel. Le Wikango XL est un assistant d aide à la conduite : il doit vous inciter à respecter le Code de
Baccalauréat Professionnel Électrotechnique, Énergie, Équipements Communicants
 Baccalauréat Professionnel Électrotechnique, Énergie, Équipements Communicants Fiche de travaux liés à des activités d : Étude et réalisation. Titre : Alarme intrusion CONRAD filaire Lieu d activité :
Baccalauréat Professionnel Électrotechnique, Énergie, Équipements Communicants Fiche de travaux liés à des activités d : Étude et réalisation. Titre : Alarme intrusion CONRAD filaire Lieu d activité :
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
LCD COLOR MONITOR (English French Translation)
") LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
DOSSIER : TOURISME ET HANDICAP
 DOSSIER : TOURISME ET HANDICAP Dossier à l intention des professionnels souhaitant s améliorer dans l accueil des personnes handicapées. Réaliser les aménagements fondamentaux pour l accueil des personnes
DOSSIER : TOURISME ET HANDICAP Dossier à l intention des professionnels souhaitant s améliorer dans l accueil des personnes handicapées. Réaliser les aménagements fondamentaux pour l accueil des personnes
ERP5. Gestion des Services Techniques des Collectivités Locales
 Gestion des Services Techniques des Collectivités Locales Cte 1 2 P 3 s tio T 4 m ilg h trc c n p.o 5 re u fe ro a le tio c M S tw u aa c e O 2 Relation Citoyen Interventions Patrimoine Core Ressources
Gestion des Services Techniques des Collectivités Locales Cte 1 2 P 3 s tio T 4 m ilg h trc c n p.o 5 re u fe ro a le tio c M S tw u aa c e O 2 Relation Citoyen Interventions Patrimoine Core Ressources
Notice de Pose, de maintenance, et de garantie pour portes sectionnelles R150 R150
 Réf : MM6152 Version : 01/12/10 Notice de Pose, de maintenance, et de garantie pour portes sectionnelles R150 R150 A B C D E F G H I J K 1 2 3 4 5 6 7 8 9 10 11 12 13 2000 10 2125 10,5 2250 11 2375 11,5
Réf : MM6152 Version : 01/12/10 Notice de Pose, de maintenance, et de garantie pour portes sectionnelles R150 R150 A B C D E F G H I J K 1 2 3 4 5 6 7 8 9 10 11 12 13 2000 10 2125 10,5 2250 11 2375 11,5
NUGELEC. NOTICE D'UTILISATION DU B.A.A.S. du type Ma - STI / MaME - STI. pages. 1 introduction 2. 2 encombrement 3 fixation
 NOTICE D'UTILISATION DU du type Ma - / MaME - pages 1 introduction 2 2 encombrement 3 fixation 3 installation 3 à 5 raccordement 4 fonctionnement 5 à 6 contrôle, essai 5 caractéristiques 7 techniques 6
NOTICE D'UTILISATION DU du type Ma - / MaME - pages 1 introduction 2 2 encombrement 3 fixation 3 installation 3 à 5 raccordement 4 fonctionnement 5 à 6 contrôle, essai 5 caractéristiques 7 techniques 6
2195257 ballons ECS vendus en France, en 2010
 SOLUTIONS D EAU CHAUDE SANITAIRE En 2010, le marché de l ECS en France représente 2 195 257 ballons ECS de différentes technologies. Dans ce marché global qui était en baisse de 1,8 %, les solutions ENR
SOLUTIONS D EAU CHAUDE SANITAIRE En 2010, le marché de l ECS en France représente 2 195 257 ballons ECS de différentes technologies. Dans ce marché global qui était en baisse de 1,8 %, les solutions ENR
«La solution» DESCRIPTION TECHNIQUE
 «La solution» DESCRIPTION TECHNIQUE MultiPark Duolift Champ d application Dans des complexes résidentiels et dans des complexes d affaires, chez des loueurs de véhicules ou chez des concessionnaires automobiles.
«La solution» DESCRIPTION TECHNIQUE MultiPark Duolift Champ d application Dans des complexes résidentiels et dans des complexes d affaires, chez des loueurs de véhicules ou chez des concessionnaires automobiles.
Les Supports UC d ordinateur
 Les Supports UC d ordinateur Les solutions pour Unité Centrale sont bien plus que de simples supports pour unités centrales. Voilà de bonnes raisons de choisir les solutions pour UC pour protéger votre
Les Supports UC d ordinateur Les solutions pour Unité Centrale sont bien plus que de simples supports pour unités centrales. Voilà de bonnes raisons de choisir les solutions pour UC pour protéger votre
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Installation kit NTS 820-F 1987009E9NN
 Installation kit NTS 820-F 1987009E9NN Nussbaum France Central 2, 460 Clos de la courtine 93160 Noisy le grand 01 78 78 72 00 www.nussbaum-france.com Préalable : Cette notice va vous aidez pour la modification
Installation kit NTS 820-F 1987009E9NN Nussbaum France Central 2, 460 Clos de la courtine 93160 Noisy le grand 01 78 78 72 00 www.nussbaum-france.com Préalable : Cette notice va vous aidez pour la modification
FICHE D AVERTISSEMENT ET PRECAUTIONS D EMPLOI
 Date : 21/05/2014 FICHE D AVERTISSEMENT ET PRECAUTIONS D EMPLOI Produits impliqués : Table de Verticalisation Top Niveau Réf TF1-2860 / TF1-2861 Tables fabriquées en 2012 (2860 10 12 01 et 2860 10 12 02)
Date : 21/05/2014 FICHE D AVERTISSEMENT ET PRECAUTIONS D EMPLOI Produits impliqués : Table de Verticalisation Top Niveau Réf TF1-2860 / TF1-2861 Tables fabriquées en 2012 (2860 10 12 01 et 2860 10 12 02)
Nous fabriquons sur mesure selon vos besoins Avantages Caractéristiques générales 17m 7 arrêts 400 Kg 5 personnes 700 x 625mm
 Nous fabriquons sur mesure selon vos besoins Ascenseur privatif vertical ayant une vitesse jusqu à 0,15 m/s, conçu pour le transport de passagers aux différents niveaux d un immeuble (résidences individuelles,
Nous fabriquons sur mesure selon vos besoins Ascenseur privatif vertical ayant une vitesse jusqu à 0,15 m/s, conçu pour le transport de passagers aux différents niveaux d un immeuble (résidences individuelles,
FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI
 : 0033 (0)169922672 : 0033 (0)169922674 : www.sordalab.com @ : info@sordalab.com FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI Fourche optique numérique Réf. BEESPI Page 1 sur 5 1. MESURES DE PRECAUTION Tenir
: 0033 (0)169922672 : 0033 (0)169922674 : www.sordalab.com @ : info@sordalab.com FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI Fourche optique numérique Réf. BEESPI Page 1 sur 5 1. MESURES DE PRECAUTION Tenir
ROULER A L ECOLE MATERNELLE
 Construire une Unité d Apprentissage en EPS ROULER A L ECOLE MATERNELLE Dossier réalisé par l équipe des CPC EPS des circonscriptions de Châlons-en-Champagne Anne GANTELET, Bernard FLORION et Pascal LOCUTY
Construire une Unité d Apprentissage en EPS ROULER A L ECOLE MATERNELLE Dossier réalisé par l équipe des CPC EPS des circonscriptions de Châlons-en-Champagne Anne GANTELET, Bernard FLORION et Pascal LOCUTY
Côté gradins, on vit les émotions en direct
 Côté gradins, on vit les émotions en direct Un accompagnement personnalisé tout au long de votre projet Vous conseiller l aménagement le plus adéquat à votre besoin, environnement et budget Concevoir une
Côté gradins, on vit les émotions en direct Un accompagnement personnalisé tout au long de votre projet Vous conseiller l aménagement le plus adéquat à votre besoin, environnement et budget Concevoir une
KIT D AIDE A LA MISE EN ACCESSIBILITE DES ETABLISSEMENTS DE TOURISME ET DES COMMERCES Édition Février 2015 FICHE N 2A RENDRE MON HÔTEL ACCESSIBLE
 KIT D AIDE A LA MISE EN ACCESSIBILITE DES ETABLISSEMENTS DE TOURISME ET DES COMMERCES Édition Février 2015 FICHE N 2A RENDRE MON HÔTEL ACCESSIBLE RAPPEL : Pour les ERP classés 1, 2, 3, 4e catégorie : Ces
KIT D AIDE A LA MISE EN ACCESSIBILITE DES ETABLISSEMENTS DE TOURISME ET DES COMMERCES Édition Février 2015 FICHE N 2A RENDRE MON HÔTEL ACCESSIBLE RAPPEL : Pour les ERP classés 1, 2, 3, 4e catégorie : Ces
Manuel de l ergonomie au bureau
 Manuel de l ergonomie au bureau 1 Manuel préparé par le Service environnement, santé et sécurité de l Université Concordia. Pour tout complément d information sur l ergonomie, les étirements et les autres
Manuel de l ergonomie au bureau 1 Manuel préparé par le Service environnement, santé et sécurité de l Université Concordia. Pour tout complément d information sur l ergonomie, les étirements et les autres
Mini projet n 1 DOSSIER DE CONCEPTION Clef USB
 Mini projet n 1 DOSSIER DE CONCEPTION Clef USB Dossier de conception 1/21 1. PRESENTATION GENERALE DU MINI PROJET 1.1 Contexte de l étude Situation existante avec un problème. Présentation de l objectif
Mini projet n 1 DOSSIER DE CONCEPTION Clef USB Dossier de conception 1/21 1. PRESENTATION GENERALE DU MINI PROJET 1.1 Contexte de l étude Situation existante avec un problème. Présentation de l objectif
Le maçon à son poste de travail
 Fiche Prévention - E2 F 03 14 Le maçon à son poste de travail Partie 2 : la protection face au vide La réalisation de murs en maçonnerie est une opération courante sur les chantiers du bâtiment (maison
Fiche Prévention - E2 F 03 14 Le maçon à son poste de travail Partie 2 : la protection face au vide La réalisation de murs en maçonnerie est une opération courante sur les chantiers du bâtiment (maison
MODE D EMPLOI ST 4000. Route de la Neuville 08460 LALOBBE FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION ST 4000. Rapport N 2520/14/7656
 Route de la Neuville 08460 LALOBBE FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION ST 4000 Rapport N 2520/14/7656 APPAREILS DE LEVAGE - STRUCTURES ALUMINIUM ACCESSOIRES DIVERS www.alusd.com TEL : 03.24.59.41.91
Route de la Neuville 08460 LALOBBE FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION ST 4000 Rapport N 2520/14/7656 APPAREILS DE LEVAGE - STRUCTURES ALUMINIUM ACCESSOIRES DIVERS www.alusd.com TEL : 03.24.59.41.91
Annexe I b. Référentiel de certification
 Annexe I b Référentiel de certification Page 15 sur 45 CORRESPONDANCE ENTRE ACTIVITÉS ET COMPÉTENCES ACTIVITÉS ET TÂCHES A1. S ORGANISER, S INTEGRER à une EQUIPE A1-T1 Préparer son intervention et/ou la
Annexe I b Référentiel de certification Page 15 sur 45 CORRESPONDANCE ENTRE ACTIVITÉS ET COMPÉTENCES ACTIVITÉS ET TÂCHES A1. S ORGANISER, S INTEGRER à une EQUIPE A1-T1 Préparer son intervention et/ou la
BROSSE DE DESHERBAGE
 BROSSE DE DESHERBAGE Montage sur plaque de base à l avant d une balayeuse aspiratrice (Réception DRIEE en genre VASP/VOIRIE) Pour éliminer les mauvaises herbes, algues et mousses sur la voirie et les espaces
BROSSE DE DESHERBAGE Montage sur plaque de base à l avant d une balayeuse aspiratrice (Réception DRIEE en genre VASP/VOIRIE) Pour éliminer les mauvaises herbes, algues et mousses sur la voirie et les espaces
Gestion commerciale. Une réponse fonctionnelle quel que soit votre secteur d activité
 Gestion commerciale La rentabilité d une entreprise passe par l augmentation du chiffre d affaires et la maîtrise des coûts de gestion. Avec Sage 100 Gestion Commerciale, vous contrôlez votre activité
Gestion commerciale La rentabilité d une entreprise passe par l augmentation du chiffre d affaires et la maîtrise des coûts de gestion. Avec Sage 100 Gestion Commerciale, vous contrôlez votre activité
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur.
 C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
Réglage, paramétrage, contrôle, modification. Salle de conférence.
 Réglage, paramétrage, contrôle, modification. Salle de conférence. Session 2011 Enseignants : Laurent BOUSQUET Bernard TAULOU SYSTEME : Salle de conférence THEME D ETUDE : Automatisme du bâtiment CCF sous
Réglage, paramétrage, contrôle, modification. Salle de conférence. Session 2011 Enseignants : Laurent BOUSQUET Bernard TAULOU SYSTEME : Salle de conférence THEME D ETUDE : Automatisme du bâtiment CCF sous
VMT Mod : Ventilation modulée pour le tertiaire
 Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Présentation et installation PCE-LOG V4 1-5
 PCE-LOG V4 version borne externe type PC50 mesures U, I + 3 TS version coffret mural mesures U, U, I + 3TS PRESENTATION 1-5 1 Presentation PCE-LOG V4 est un datalogger pour la télésurveillance de la protection
PCE-LOG V4 version borne externe type PC50 mesures U, I + 3 TS version coffret mural mesures U, U, I + 3TS PRESENTATION 1-5 1 Presentation PCE-LOG V4 est un datalogger pour la télésurveillance de la protection
Baccalauréat professionnel. Maintenance des Équipements Industriels
 Baccalauréat professionnel Maintenance des Équipements Industriels 2005 SOMMAIRE DES ANNEXES DE L ARRÊTÉ DE CRÉATION DU DIPLÔME ANNEXE I : RÉFÉRENTIELS DU DIPLÔME I a. Référentiel des activités professionnelles...7
Baccalauréat professionnel Maintenance des Équipements Industriels 2005 SOMMAIRE DES ANNEXES DE L ARRÊTÉ DE CRÉATION DU DIPLÔME ANNEXE I : RÉFÉRENTIELS DU DIPLÔME I a. Référentiel des activités professionnelles...7
Gestion de la Maintenance Assistée par Ordinateur
 Gestion de la Maintenance Assistée par Ordinateur Simplifiez vous la maintenance Gagner en productivité. Réduire les pannes. Améliorer la durée de vie des équipements. Diminuer les coûts de maintenance.
Gestion de la Maintenance Assistée par Ordinateur Simplifiez vous la maintenance Gagner en productivité. Réduire les pannes. Améliorer la durée de vie des équipements. Diminuer les coûts de maintenance.
Le monte-escalier électrique pour des charges jusqu à 330 kg
 Le monte-escalier électrique pour des charges jusqu à 330 kg 1 LIFTKAR HD Polyvalent et économique Le transporteur pour charges lourdes jusqu à 330 kg. Les charges lourdes sont des tâches difficiles. En
Le monte-escalier électrique pour des charges jusqu à 330 kg 1 LIFTKAR HD Polyvalent et économique Le transporteur pour charges lourdes jusqu à 330 kg. Les charges lourdes sont des tâches difficiles. En
Simply mobile. Monte-escalier mobile POIGNÉES ERGOBALANCE PEU D EFFORTS ET EN TOUTE SÉCURITÉ. Franchir les escaliers en toute sécurité.
 Simply mobile. Monte-escalier mobile POIGNÉES ERGOBALANCE PEU D EFFORTS ET EN TOUTE SÉCURITÉ Franchir les escaliers en toute sécurité. Pour toutes questions, écrivez-nous sur contact@arabesque.pro Des
Simply mobile. Monte-escalier mobile POIGNÉES ERGOBALANCE PEU D EFFORTS ET EN TOUTE SÉCURITÉ Franchir les escaliers en toute sécurité. Pour toutes questions, écrivez-nous sur contact@arabesque.pro Des
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Manuel d utilisation pour la Presse à Transfert Grand Format Pneumatique Double Poste
 Manuel d utilisation pour la Presse à Transfert Grand Format Pneumatique Double Poste GF-8060P2A N de série de l appareil : ZI des Chanoux - 25, rue Louis Ampère 93330 Neuilly-sur-Marne FRANCE Tél. : +33
Manuel d utilisation pour la Presse à Transfert Grand Format Pneumatique Double Poste GF-8060P2A N de série de l appareil : ZI des Chanoux - 25, rue Louis Ampère 93330 Neuilly-sur-Marne FRANCE Tél. : +33
Tableaux d alarme sonores
 Tableaux d alarme sonores Type T4 CT 1 boucle NiMh Réf. : 320 020 Type T4 CT 2 boucles Réf. : 320 019 FEU BOUCLE 1 FEU TEST BOUCLE 2 DEFAUT BATTERIE SOUS TENSION SECTEUR ABSENT Contenu de l emballage -
Tableaux d alarme sonores Type T4 CT 1 boucle NiMh Réf. : 320 020 Type T4 CT 2 boucles Réf. : 320 019 FEU BOUCLE 1 FEU TEST BOUCLE 2 DEFAUT BATTERIE SOUS TENSION SECTEUR ABSENT Contenu de l emballage -
Table d examen manuelle
 204 Table d examen manuelle Que signifie pour vous une bonne valeur? «Voici comment je définis la valeur : un équipement de qualité qui m aide à prodiguer des soins à mes patients. Les tables d examen
204 Table d examen manuelle Que signifie pour vous une bonne valeur? «Voici comment je définis la valeur : un équipement de qualité qui m aide à prodiguer des soins à mes patients. Les tables d examen
C ) Détail volets A, B, C, D et E. Hypothèses (facteurs externes au projet) Sources de vérification. Actions Objectifs Méthode, résultats
 Détail volets A, B, C, D et E. Hypothèses (facteurs externes au projet) Sources de vérification. Actions Objectifs Méthode, résultats") C ) Détail volets A, B, C, D et E Actions Objectifs Méthode, résultats VOLET A : JUMELAGE DE 18 MOIS Rapports d avancement du projet. Réorganisation de l administration fiscale Rapports des voyages d étude.
C ) Détail volets A, B, C, D et E Actions Objectifs Méthode, résultats VOLET A : JUMELAGE DE 18 MOIS Rapports d avancement du projet. Réorganisation de l administration fiscale Rapports des voyages d étude.
Instructions de montage
 LA SÉCURITÉ AU PLUS HAUT NIVEAU Easi - Dec Plateforme d accès de 2 mètres Instructions de montage Kee Safety SAS 30 bld Pasteur 75015 Paris Tél : + 33 1 53 58 14 26 Fax : + 33 1 53 58 14 11 Dispositif
LA SÉCURITÉ AU PLUS HAUT NIVEAU Easi - Dec Plateforme d accès de 2 mètres Instructions de montage Kee Safety SAS 30 bld Pasteur 75015 Paris Tél : + 33 1 53 58 14 26 Fax : + 33 1 53 58 14 11 Dispositif
2/ Configurer la serrure :
 NOTICE DE POSE SLIM ATIC Multipoints / Béquille contrôlée Série 8466. 8467 Réf..272.44.4. A A / Préparation du bandeau 1 / Retirer les capots : serrure et gâche. 2/ Configurer la serrure : Si votre porte
NOTICE DE POSE SLIM ATIC Multipoints / Béquille contrôlée Série 8466. 8467 Réf..272.44.4. A A / Préparation du bandeau 1 / Retirer les capots : serrure et gâche. 2/ Configurer la serrure : Si votre porte
Séance du jeudi 22 novembre 2012 (13h30 16h30)
") Séance du jeudi 22 novembre 2012 (13h30 16h30) Lieu : salle de sciences physiques, lycée français de Luanda Public : entre 6 et 12 élèves de 3eme, 2de et 1ereS (un des élèves ayant amené son propre robot
Séance du jeudi 22 novembre 2012 (13h30 16h30) Lieu : salle de sciences physiques, lycée français de Luanda Public : entre 6 et 12 élèves de 3eme, 2de et 1ereS (un des élèves ayant amené son propre robot
Alimentation portable 10000 mah
 Alimentation portable 10000 mah Guide d'utilisation 31883 I. Introduction Ce produit est léger, de haute capacité, élégant et constitue une alimentation portable pratique pour la plupart des appareils
Alimentation portable 10000 mah Guide d'utilisation 31883 I. Introduction Ce produit est léger, de haute capacité, élégant et constitue une alimentation portable pratique pour la plupart des appareils
Logiciel EV3 LEGO MINDSTORMS Education
 Robot éducateur : LEGO Education a le plaisir de vous présenter Robot éducateur, une sélection d'activités pédagogiques vous permettant de prendre en main votre EV3 LEGO MINDSTORMS Education de façon structurée
Robot éducateur : LEGO Education a le plaisir de vous présenter Robot éducateur, une sélection d'activités pédagogiques vous permettant de prendre en main votre EV3 LEGO MINDSTORMS Education de façon structurée
TUTORIEL Qualit Eval. Introduction :
 TUTORIEL Qualit Eval Introduction : Qualit Eval est à la fois un logiciel et un référentiel d évaluation de la qualité des prestations en établissements pour Personnes Agées. Notre outil a été spécifiquement
TUTORIEL Qualit Eval Introduction : Qualit Eval est à la fois un logiciel et un référentiel d évaluation de la qualité des prestations en établissements pour Personnes Agées. Notre outil a été spécifiquement
Notice d utilisation. Présentation générale...p 2 à 3. Installation...P 3 à 6. Fonctionnement...P 9. Agréé une marque déposée par La Poste
 Notice d utilisation Agréé une marque déposée par La Poste Présentation générale...p 2 à 3 Installation...P 3 à 6 Fonctionnement...P 9 Présentation générale La centrale Vachette FACILY PASS propose une
Notice d utilisation Agréé une marque déposée par La Poste Présentation générale...p 2 à 3 Installation...P 3 à 6 Fonctionnement...P 9 Présentation générale La centrale Vachette FACILY PASS propose une
Capteur mécanique universel HF 32/2/B
 Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
CLASSE MOBILE TABLETTE CARTICE TAB 30 CLASSE MOBILE ARATICE 2014 1/11
 CLASSE MOBILE TABLETTE CARTICE TAB 30 1/11 SOMMAIRE LE MEUBLE VUE D ENSEMBLE... 3 Rangement des TABLETTES :... 3 Rangement supplémentaires (Double batterie, documentation, câbles,.)... 3 Branchement de
CLASSE MOBILE TABLETTE CARTICE TAB 30 1/11 SOMMAIRE LE MEUBLE VUE D ENSEMBLE... 3 Rangement des TABLETTES :... 3 Rangement supplémentaires (Double batterie, documentation, câbles,.)... 3 Branchement de
TAP-PAR. Test d aptitudes physiques pour paramédics. Description du test
 TAP-PAR Test d aptitudes physiques pour paramédics Description du test INTRODUCTION Le travail de paramédic nécessite une capacité physique supérieure à celle de la population moyenne. En effet, ceux-ci
TAP-PAR Test d aptitudes physiques pour paramédics Description du test INTRODUCTION Le travail de paramédic nécessite une capacité physique supérieure à celle de la population moyenne. En effet, ceux-ci
Thermomètre portable Type CTH6500
 Etalonnage Thermomètre portable Type CTH6500 Fiche technique WIKA CT 55.10 Applications Etalonnage de thermomètres Mesure de température pour les besoins d'assurance qualité Mesures dans des applications
Etalonnage Thermomètre portable Type CTH6500 Fiche technique WIKA CT 55.10 Applications Etalonnage de thermomètres Mesure de température pour les besoins d'assurance qualité Mesures dans des applications
Nb. De pages : 24 MANGO. Manuel d'utilisation. Version 1.2. décembre 2010
 N. de page : 1 MANGO Manuel d'utilisation Version décembre 2010 N. de page : 2 Table des matières 1.Présentation...3 Description technique... 3 2.Caractéristiques techniques...5 Aspect technique d'une
N. de page : 1 MANGO Manuel d'utilisation Version décembre 2010 N. de page : 2 Table des matières 1.Présentation...3 Description technique... 3 2.Caractéristiques techniques...5 Aspect technique d'une
ALIMENTATION PORTABLE 9000 AVEC DEMARRAGE DE SECOURS POUR VOITURE
 ALIMENTATION PORTABLE 9000 AVEC DEMARRAGE DE SECOURS POUR VOITURE Guide d'utilisation 31889 Veuillez lire attentivement ce manuel avant l'utilisation de ce produit. Dans le cas contraire, cela pourrait
ALIMENTATION PORTABLE 9000 AVEC DEMARRAGE DE SECOURS POUR VOITURE Guide d'utilisation 31889 Veuillez lire attentivement ce manuel avant l'utilisation de ce produit. Dans le cas contraire, cela pourrait
SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T
 SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T Sirène solaire extérieure auto-alimentée sans fil avec récepteur intégré à code tournant. Boîtier polycarbonate de 3mm résistant aux intempéries, autoprotection
SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T Sirène solaire extérieure auto-alimentée sans fil avec récepteur intégré à code tournant. Boîtier polycarbonate de 3mm résistant aux intempéries, autoprotection
armoires de fermentation
 armoires de fermentation contrôlée Le froid qui préserve vos pâtes 5 7 7, r u e C é l e s t i n H e n n i o n - 5 9 1 4 4 G O M M E G N I E S t é l. + 3 3. ( 0 ) 3. 2 7. 2 8. 1 8. 1 8 - f a x. + 3 3. (
armoires de fermentation contrôlée Le froid qui préserve vos pâtes 5 7 7, r u e C é l e s t i n H e n n i o n - 5 9 1 4 4 G O M M E G N I E S t é l. + 3 3. ( 0 ) 3. 2 7. 2 8. 1 8. 1 8 - f a x. + 3 3. (
CLEANassist Emballage
 Emballage Dans la zone d emballage, il est important de vérifier exactement l état et la fonctionnalité des instruments, car ce sont les conditions fondamentales pour la réussite d une opération. Il est
Emballage Dans la zone d emballage, il est important de vérifier exactement l état et la fonctionnalité des instruments, car ce sont les conditions fondamentales pour la réussite d une opération. Il est
les outils de la gestion de projet
 les outils de la gestion de projet Sommaire Objectifs de la gestion de projet Les étapes du projet Les outils de gestion de projets Paramétrage de l outil PROJET : «ensemble des actions à entreprendre
les outils de la gestion de projet Sommaire Objectifs de la gestion de projet Les étapes du projet Les outils de gestion de projets Paramétrage de l outil PROJET : «ensemble des actions à entreprendre
Equipe EPS 68 L athlétisme à l école primaire Page 56 sur 109
 Equipe EPS 68 L athlétisme à l école primaire Page 56 sur 109 LANCER EN ROTATION lancer d anneaux FONDAMENTAUX Tenir l engin en pronation (paume vers le bas) Lancer avec tout le corps Les lancers en rotation
Equipe EPS 68 L athlétisme à l école primaire Page 56 sur 109 LANCER EN ROTATION lancer d anneaux FONDAMENTAUX Tenir l engin en pronation (paume vers le bas) Lancer avec tout le corps Les lancers en rotation
NOTICE D UTILISATION
 NOTICE D UTILISATION NOTICE D UTILISATION SIEGE COQUILLE INNOV SA NOTICE D UTILISATION SIEGE NOTICE COQUILLE D UTILISATION INNOV SA SIEGE COQUILLE INNOV SA INNOV SA NOTICE D UTILISATION SIEGE Fauteuils
NOTICE D UTILISATION NOTICE D UTILISATION SIEGE COQUILLE INNOV SA NOTICE D UTILISATION SIEGE NOTICE COQUILLE D UTILISATION INNOV SA SIEGE COQUILLE INNOV SA INNOV SA NOTICE D UTILISATION SIEGE Fauteuils
c-max le monte escalier universel monter et descendre les escaliers en toute sécurité
 c-max le monte escalier universel monter et descendre les escaliers en toute sécurité www.aat-online.de La mobilité est un facteur important de votre qualité de vie. Les escaliers ne doivent pas constituer
c-max le monte escalier universel monter et descendre les escaliers en toute sécurité www.aat-online.de La mobilité est un facteur important de votre qualité de vie. Les escaliers ne doivent pas constituer
DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE
 DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE P2-F et P4-F 185 (Modèle standard) P2-F et P4-F 170 MODELE P2/4-F 170 P2/4-F 185 (Standard) P2/4-F 195 P2-F et P4-F 195 H 325 340 350 DH 156 171 181
DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE P2-F et P4-F 185 (Modèle standard) P2-F et P4-F 170 MODELE P2/4-F 170 P2/4-F 185 (Standard) P2/4-F 195 P2-F et P4-F 195 H 325 340 350 DH 156 171 181
L ACCUEIL DU PUBLIC 3.1 REPÉRAGE DE LA BANQUE D ACCUEIL PRINCIPES GÉNÉRAUX DE L ACCESSIBILITÉ CE QUE DIT LA LOI RECOMMANDATIONS
 3 3.1 REPÉRAGE DE LA BANQUE D ACCUEIL PRINCIPES GÉNÉRAUX DE L ACCESSIBILITÉ L accueil doit pouvoir être identifié et atteint dès le franchissement de la porte d accès du bâtiment. Pour les personnes déficientes
3 3.1 REPÉRAGE DE LA BANQUE D ACCUEIL PRINCIPES GÉNÉRAUX DE L ACCESSIBILITÉ L accueil doit pouvoir être identifié et atteint dès le franchissement de la porte d accès du bâtiment. Pour les personnes déficientes
Interface PC Vivago Ultra. Pro. Guide d'utilisation
 Interface PC Vivago Ultra Pro Guide d'utilisation Version 1.03 Configuration de l'interface PC Vivago Ultra Configuration requise Avant d'installer Vivago Ultra sur votre ordinateur assurez-vous que celui-ci
Interface PC Vivago Ultra Pro Guide d'utilisation Version 1.03 Configuration de l'interface PC Vivago Ultra Configuration requise Avant d'installer Vivago Ultra sur votre ordinateur assurez-vous que celui-ci