Apprentissage d une Tâche de Contrôle pour un Robot Mobile en LEGO Mindstorms
|
|
|
- Julie Denis
- il y a 8 ans
- Total affichages :
Transcription
1 Apprentissage d une Tâche de Contrôle pour un Robot Mobile en LEGO Mindstorms Mémoire présenté par Benjamin Haibe-Kains Directeur de mémoire: M. Gianluca Bontempi

2 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 2/34

3 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 3/34

4 Introduction Robotique Usage intensif de robots spécialisés et non autonomes Problème de la robotique autonome: Environnement réel Effets des actions incertains Gestion complexe des informations sensorielles Premier pas vers l autonomie: apprendre la relation sensori-motrice Utilisation de méthodes d apprentissage 4/34

5 Introduction Robotique (2) Architecture de contrôle: Approche classique Approche basée sur le comportement (behaviorbased - R. Brooks) 5/34

6 Introduction Mémoire Choix et développement d une plateforme robotique Construction d un robot mobile Réalisation d une tâche grâce à plusieurs politiques de contrôle à des fins de comparaisons théorique et empirique Utilisation d une méthode d apprentissage Apprentissage adaptatif 6/34

7 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 7/34

8 Contributions Construction d un robot mobile en LEGO Mindstorms Développement d outils permettant son utilisation: Communication Gestion du matériel Mise en œuvre de plusieurs politiques de contrôle Comparaison sur base d expériences en environnement réel 8/34

9 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 9/34

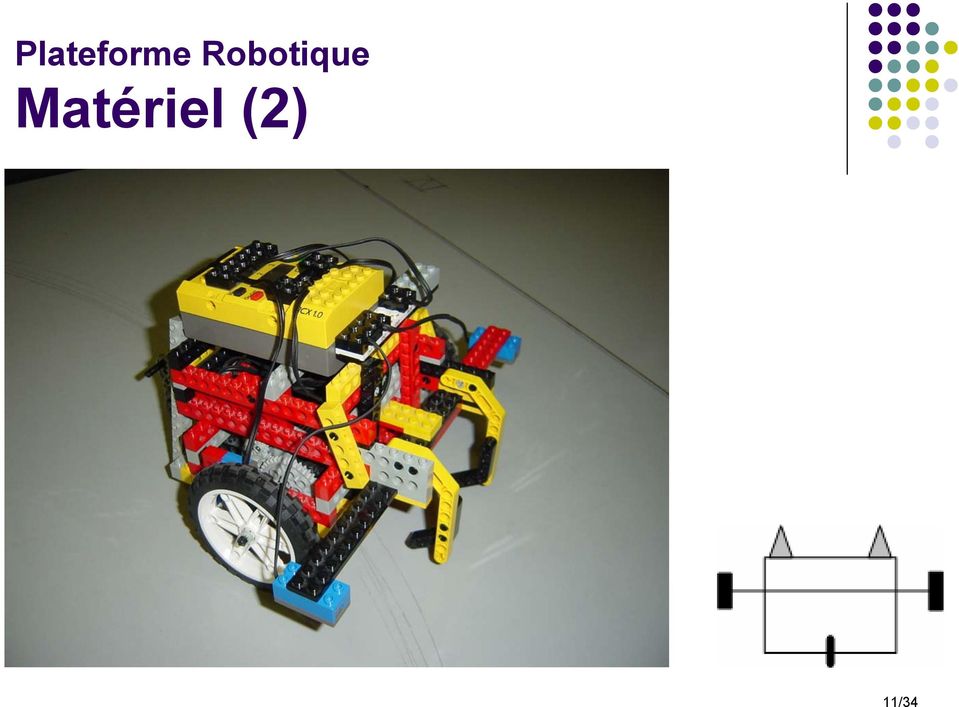
10 Plateforme Robotique Matériel Choix des LEGO Mindstorms Construction d un robot mobile autonome: Cinématique: système par poussée différentielle Périphériques du microcontrôleur du robot (RCX): Moteurs (LEGO) Senseurs de rotation (LEGO) Senseurs de luminosité (LEGO) Multiplexeur actif (Mindsensors) 10/34
 Senseurs de luminosité (LEGO) Multiplexeur actif")
11 Plateforme Robotique Matériel (2) 11/34
12 Plateforme Robotique Matériel (3) Analyse des senseurs de luminosité: Prix acceptable Disponibilité Information lumineuse pauvre: Détection luminosité/obscurité à 1 m de la source lumineuse Fort bruité comme senseur de distance Variance élevée des mesures Extraction de l information difficile Mouvements imprécis 12/34

13 Plateforme Robotique Logiciel BrickOS: système d exploitation et programmes en C Protocole de communication Gestion de plusieurs tours d émission/réception infra-rouges pour une communication fiable Gestion de plusieurs RCX RCX exécute des ordres simples Plateforme informatique contrôle le RCX 13/34

14 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 14/34

15 Tâche de contrôle Description Recherche d une source lumineuse Difficultés: Mesures de luminosité bruitées Déplacement imprécis 15/34

16 Tâche de contrôle Description (2) S inscrit comme un comportement possible de l approche behavior-based 16/34

17 Tâche de contrôle Politiques de Contrôle A des fins de comparaisons théoriques et empiriques: Politique de contrôle figée (PF) Politique de contrôle basée sur l analyse des données sensorielles (PAS) Politique de contrôle basée sur l apprentissage de la relation sensori-motrice (PAR) 17/34
")
18 Tâche de contrôle PF et PAS Politiques de contrôle basée sur les connaissances du concepteur PF: contrôle figé PAS: contrôle paramétrique 18/34

19 Tâche de contrôle PAR Réalisation de la tâche par l apprentissage de la relation sensorimotrice Méthode d apprentissage local: Lazy Learning Contrôle basé sur les prédictions 19/34

20 Tâche de contrôle Contrôle Exemple de contrôle avec 2 actions possibles (déplacement à gauche ou à droite) 20/34

21 Tâche de contrôle Contrôle (2) Contrôleur basé sur un prédicteur 21/34
22 Tâche de contrôle Lazy Learning Méthode d apprentissage local supervisé Utilisée pour apprendre la relation sensorimotrice Comparaison avec un modèle linéaire: le Lazy Learning est plus performant Utilisation efficace dans une politique de contrôle Apprentissage adaptatif aisé 22/34
23 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 23/34
24 Expériences Recherche de la Lumière Performances du contrôle: Nombre d actions Durée de l expérience 24/34
25 Expériences Recherche de la Lumière (2) Résultats: PF PAS PAR Nombre d'actions Durée de l'expérience (sec) Supériorité de la PAR 25/34
26 Expériences Apprentissage Adaptatif Politique d apprentissage adaptatif du contrôle: ajout d observations en cours de contrôle Diminution du nombre d actions et de la durée de l expérience au fur et à mesure de l ajout d observations 26/34
27 Expériences Apprentissage Adaptatif (2) Politique d apprentissage adaptatif du contrôle: changement de position des senseurs de luminosité 27/34
28 Expériences Apprentissage Adaptatif (3) Diminution du nombre d actions et de la durée de l expérience au fur et à mesure de l ajout d observations A la quatrième expérience, les données d apprentissage sont oubliées 28/34
29 Expériences Film de la PAR 29/34
30 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 30/34
31 Conclusion Développement de la plateforme LEGO Mindstorms permet l introduction de concepts de base en robotique autonome Information sensorielle pauvre et mouvements imprécis Mise en œuvre de plusieurs politiques de contrôle met en évidence les performances supérieures de la PAR Adaptation du contrôle est une caractéristique importante 31/34
32 Mémoire Plan Introduction Contributions Plateforme Robotique Tâche de Contrôle Expériences Conclusion Travaux Futurs 32/34
33 Travaux Futurs Travaux futurs variés grâce à une plateforme robotique fonctionnelle: Autres senseurs, autres tâches de contrôle Contrôle de plusieurs robots Autres méthodes d apprentissage Mise à disposition publique du code source Développement en tant que plateforme éducative 33/34
34 Mémoire Questions 34/34
NXT Guide de mise en route. Rob Widger
 NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
OPTIMISER SON PROCESSUS DE TEST AVEC UNE APPROCHE BOITE GRISE
 OPTIMISER SON PROCESSUS DE TEST AVEC UNE APPROCHE BOITE GRISE Retour d expérience Benjamin Boutin QA Manager S2E www.s2e-services-epargne-entreprise.com Marc Rambert Director Dynamic Testing Solution Coverity/Synopsys
OPTIMISER SON PROCESSUS DE TEST AVEC UNE APPROCHE BOITE GRISE Retour d expérience Benjamin Boutin QA Manager S2E www.s2e-services-epargne-entreprise.com Marc Rambert Director Dynamic Testing Solution Coverity/Synopsys
Masses de données. 1. Introduction 2. Problématiques 3. Socle de formation (non présenté) 4. Liens avec Formation INSA
 4. Liens avec Formation INSA") Masses de données 1. Introduction 2. Problématiques 3. Socle de formation (non présenté) 4. Liens avec Formation INSA Rédacteurs : Mjo Huguet / N. Jozefowiez 1. Introduction : Besoins Informations et Aide
Masses de données 1. Introduction 2. Problématiques 3. Socle de formation (non présenté) 4. Liens avec Formation INSA Rédacteurs : Mjo Huguet / N. Jozefowiez 1. Introduction : Besoins Informations et Aide
Succès garanti et rapide avec. LEGO MINDSTORMS Education
 Succès garanti et rapide avec LEGO MINDSTORMS Education Introduction LEGO MINDSTORMS Education est un des moyens les plus passionnants pour aborder et explorer les sciences, la technologie et les mathématiques
Succès garanti et rapide avec LEGO MINDSTORMS Education Introduction LEGO MINDSTORMS Education est un des moyens les plus passionnants pour aborder et explorer les sciences, la technologie et les mathématiques
IV - Programme détaillé par matière (1 fiche détaillée par matière)
") IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
Logiciel EV3 LEGO MINDSTORMS Education
 Robot éducateur : LEGO Education a le plaisir de vous présenter Robot éducateur, une sélection d'activités pédagogiques vous permettant de prendre en main votre EV3 LEGO MINDSTORMS Education de façon structurée
Robot éducateur : LEGO Education a le plaisir de vous présenter Robot éducateur, une sélection d'activités pédagogiques vous permettant de prendre en main votre EV3 LEGO MINDSTORMS Education de façon structurée
Environnement Architecture de controle. Décisions
 Chapitre 1 Introduction 1.1 Robot Mobile Il existe diverses définitions du terme robot, mais elles tournent en général autour de celle-ci : Un robot est une machine équipée de capacités de perception,
Chapitre 1 Introduction 1.1 Robot Mobile Il existe diverses définitions du terme robot, mais elles tournent en général autour de celle-ci : Un robot est une machine équipée de capacités de perception,
TABLE DES MATIÈRES. Bruxelles, De Boeck, 2011, 736 p.
 STATISTIQUE THÉORIQUE ET APPLIQUÉE Tome 2 Inférence statistique à une et à deux dimensions Pierre Dagnelie TABLE DES MATIÈRES Bruxelles, De Boeck, 2011, 736 p. ISBN 978-2-8041-6336-5 De Boeck Services,
STATISTIQUE THÉORIQUE ET APPLIQUÉE Tome 2 Inférence statistique à une et à deux dimensions Pierre Dagnelie TABLE DES MATIÈRES Bruxelles, De Boeck, 2011, 736 p. ISBN 978-2-8041-6336-5 De Boeck Services,
MANUEL D UTILISATION (simplifié) DE LA CENTRALE LS-30
 DE LA CENTRALE LS-30") MANUEL D UTILISATION (simplifié) DE LA CENTRALE LS-30 6 rue Philogène Lalande DES JARDINS - Doniambo - Dock E10 Tel: 26.22.29 Fax: 26.22.39 e-mail: info@prosystems.nc SOMMAIRE I. CLAVIER ET PANNEAU D AFFICHAGE...
MANUEL D UTILISATION (simplifié) DE LA CENTRALE LS-30 6 rue Philogène Lalande DES JARDINS - Doniambo - Dock E10 Tel: 26.22.29 Fax: 26.22.39 e-mail: info@prosystems.nc SOMMAIRE I. CLAVIER ET PANNEAU D AFFICHAGE...
Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle des systèmes
 Section : S Option : Sciences de l ingénieur Discipline : Génie Électrique Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle
Section : S Option : Sciences de l ingénieur Discipline : Génie Électrique Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle
Guide de l'utilisateur
 Guide de l'utilisateur πr Informatique Sciences Technologie Ingénierie Mathématiques LEGOeducation.com/MINDSTORMS Table des matières Introduction + Bienvenue.... 3 Technologie EV3 + Présentation... 4 +
Guide de l'utilisateur πr Informatique Sciences Technologie Ingénierie Mathématiques LEGOeducation.com/MINDSTORMS Table des matières Introduction + Bienvenue.... 3 Technologie EV3 + Présentation... 4 +
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Apprentissage par renforcement (1a/3)
") Apprentissage par renforcement (1a/3) Bruno Bouzy 23 septembre 2014 Ce document est le chapitre «Apprentissage par renforcement» du cours d apprentissage automatique donné aux étudiants de Master MI, parcours
Apprentissage par renforcement (1a/3) Bruno Bouzy 23 septembre 2014 Ce document est le chapitre «Apprentissage par renforcement» du cours d apprentissage automatique donné aux étudiants de Master MI, parcours
Introduction au Data-Mining
 Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
TABLE DES MATIÈRES. PRINCIPES D EXPÉRIMENTATION Planification des expériences et analyse de leurs résultats. Pierre Dagnelie
 PRINCIPES D EXPÉRIMENTATION Planification des expériences et analyse de leurs résultats Pierre Dagnelie TABLE DES MATIÈRES 2012 Presses agronomiques de Gembloux pressesagro.gembloux@ulg.ac.be www.pressesagro.be
PRINCIPES D EXPÉRIMENTATION Planification des expériences et analyse de leurs résultats Pierre Dagnelie TABLE DES MATIÈRES 2012 Presses agronomiques de Gembloux pressesagro.gembloux@ulg.ac.be www.pressesagro.be
Programmes Prioritaires Nationaux : Fumées de soudage. Y. CAROMEL - Contrôleur de sécurité
 Programmes Prioritaires Nationaux : Fumées de soudage Y. CAROMEL - Contrôleur de sécurité Règles essentielles de ventilation appliquées aux activités de soudage Y. CAROMEL - Contrôleur de sécurité Règles
Programmes Prioritaires Nationaux : Fumées de soudage Y. CAROMEL - Contrôleur de sécurité Règles essentielles de ventilation appliquées aux activités de soudage Y. CAROMEL - Contrôleur de sécurité Règles
Comparaison des performances d'éclairages
 Comparaison des performances d'éclairages Présentation Support pour alimenter des ampoules de différentes classes d'efficacité énergétique: une ampoule LED, une ampoule fluorescente, une ampoule à incandescence
Comparaison des performances d'éclairages Présentation Support pour alimenter des ampoules de différentes classes d'efficacité énergétique: une ampoule LED, une ampoule fluorescente, une ampoule à incandescence
PRISE DE BRIEF STAND SUR MESURE
 Vous souhaitez un stand sur mesure, communiquez-nous vos besoins PRISE DE BRIEF STAND SUR MESURE À retourner par mail Mail: nicolas.brun@adrex.fr Pour toute information, contactez-nous au 09 51 72 83 41
Vous souhaitez un stand sur mesure, communiquez-nous vos besoins PRISE DE BRIEF STAND SUR MESURE À retourner par mail Mail: nicolas.brun@adrex.fr Pour toute information, contactez-nous au 09 51 72 83 41
IODAA. de l 1nf0rmation à la Décision par l Analyse et l Apprentissage / 21
 IODAA de l 1nf0rmation à la Décision par l Analyse et l Apprentissage IODAA Informations générales 2 Un monde nouveau Des données numériques partout en croissance prodigieuse Comment en extraire des connaissances
IODAA de l 1nf0rmation à la Décision par l Analyse et l Apprentissage IODAA Informations générales 2 Un monde nouveau Des données numériques partout en croissance prodigieuse Comment en extraire des connaissances
Présentation du logiciel
 Chapitre A Présentation du logiciel R Pré-requis et objectif La lecture du chapitre sur l installation de R dans les Annexes peut se révéler utile. Ce chapitre présente les origines, l objectif et les
Chapitre A Présentation du logiciel R Pré-requis et objectif La lecture du chapitre sur l installation de R dans les Annexes peut se révéler utile. Ce chapitre présente les origines, l objectif et les
OFFRE EN STAGE SIP POUR LES ETUDIANT(E)S D ANNEE PROPEDEUTIQUE SANTE ET LES ETUDIANTS BACHELOR FILIERE SOINSINFIRMIERS
S D ANNEE PROPEDEUTIQUE SANTE ET LES ETUDIANTS BACHELOR FILIERE SOINSINFIRMIERS") OFFRE EN STAGE SIP POUR LES ETUDIANT(E)S D ANNEE PROPEDEUTIQUE SANTE ET LES ETUDIANTS BACHELOR FILIERE SOINSINFIRMIERS Filière : APS et Bachelor en soins infirmier Nom de l institution : CHUV Nom de l
OFFRE EN STAGE SIP POUR LES ETUDIANT(E)S D ANNEE PROPEDEUTIQUE SANTE ET LES ETUDIANTS BACHELOR FILIERE SOINSINFIRMIERS Filière : APS et Bachelor en soins infirmier Nom de l institution : CHUV Nom de l
EDHEC EXECUTIVE EDUCATION La formation sur mesure du Groupe EDHEC
 EDHEC EXECUTIVE EDUCATION La formation sur mesure du Groupe EDHEC Jeux sérieux, nouvelle façon d étudier? STÉFAN CRISAN DIRECTEUR DÉLÉGUÉ EDHEC EXECUTIVE EDUCATION CAMPUS DE NICE stefan.crisan@edhec.edu
EDHEC EXECUTIVE EDUCATION La formation sur mesure du Groupe EDHEC Jeux sérieux, nouvelle façon d étudier? STÉFAN CRISAN DIRECTEUR DÉLÉGUÉ EDHEC EXECUTIVE EDUCATION CAMPUS DE NICE stefan.crisan@edhec.edu
K. Ammar, F. Bachoc, JM. Martinez. Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau
 Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
Alarme domestique- Présentation
 STI2D PROJET SIN Alarme domestique- Présentation Document réponses Séquence découverte Le fonctionnement du système d alarme domestique: (Démarche d investigation) Après avoir fait une présentation de
STI2D PROJET SIN Alarme domestique- Présentation Document réponses Séquence découverte Le fonctionnement du système d alarme domestique: (Démarche d investigation) Après avoir fait une présentation de
1. PRESENTATION GENERALE DU PRODUIT
 1. PRESENTATION GENERALE DU PRODUIT 1.1 Mise en situation : A quoi servent les pneus? Les pneus sont des éléments qui relient la voiture à la route. Ils doivent donc être en parfait état pour remplir leurs
1. PRESENTATION GENERALE DU PRODUIT 1.1 Mise en situation : A quoi servent les pneus? Les pneus sont des éléments qui relient la voiture à la route. Ils doivent donc être en parfait état pour remplir leurs
Installer un espace de travail collaboratif et d e learning.
 STG Travail collaboratif / c2i Mars 2008 Installer un espace de travail collaboratif et d e learning. Olivier Mondet http://unidentified one.net Lorsque l on désire installer une plateforme de travail
STG Travail collaboratif / c2i Mars 2008 Installer un espace de travail collaboratif et d e learning. Olivier Mondet http://unidentified one.net Lorsque l on désire installer une plateforme de travail
Fonctions linéaires et affines. 1 Fonctions linéaires. 1.1 Vocabulaire. 1.2 Représentation graphique. 3eme
 Fonctions linéaires et affines 3eme 1 Fonctions linéaires 1.1 Vocabulaire Définition 1 Soit a un nombre quelconque «fixe». Une fonction linéaire associe à un nombre x quelconque le nombre a x. a s appelle
Fonctions linéaires et affines 3eme 1 Fonctions linéaires 1.1 Vocabulaire Définition 1 Soit a un nombre quelconque «fixe». Une fonction linéaire associe à un nombre x quelconque le nombre a x. a s appelle
COPY. Picture Style Editor Ver. 1.4 MODE D EMPLOI. Logiciel de création de fichiers de style d image. Contenu de ce mode d emploi
 Logiciel de création de fichiers de style d image Picture Style Editor Ver..4 MODE D EMPLOI Contenu de ce mode d emploi Picture Style Editor est abrégé en PSE. Dans ce mode d emploi, les fenêtres utilisées
Logiciel de création de fichiers de style d image Picture Style Editor Ver..4 MODE D EMPLOI Contenu de ce mode d emploi Picture Style Editor est abrégé en PSE. Dans ce mode d emploi, les fenêtres utilisées
PROGRAMME DU CONCOURS DE RÉDACTEUR INFORMATICIEN
 PROGRAMME DU CONCOURS DE RÉDACTEUR INFORMATICIEN 1. DÉVELOPPEMENT D'APPLICATION (CONCEPTEUR ANALYSTE) 1.1 ARCHITECTURE MATÉRIELLE DU SYSTÈME INFORMATIQUE 1.1.1 Architecture d'un ordinateur Processeur,
PROGRAMME DU CONCOURS DE RÉDACTEUR INFORMATICIEN 1. DÉVELOPPEMENT D'APPLICATION (CONCEPTEUR ANALYSTE) 1.1 ARCHITECTURE MATÉRIELLE DU SYSTÈME INFORMATIQUE 1.1.1 Architecture d'un ordinateur Processeur,
Dan Istrate. Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier
 Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
LES CAPTEURS CCD/CMOS
 Jérôme SIX Léo MEIGNAN Licence Professionnelle Gestion de la Production Industrielle, spécialité Vision Industrielle LES CAPTEURS CCD/CMOS Introduction...3 I) CCD...4 I.1) Historique...4 I.2) Fonctionnement...4
Jérôme SIX Léo MEIGNAN Licence Professionnelle Gestion de la Production Industrielle, spécialité Vision Industrielle LES CAPTEURS CCD/CMOS Introduction...3 I) CCD...4 I.1) Historique...4 I.2) Fonctionnement...4
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Introduction au Data-Mining
 Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Votre Partenaire pour vos projets d Automatismes de bâtiments Tertiaires et Industriels
 Votre Partenaire pour vos projets d Automatismes de bâtiments Tertiaires et Industriels Spécialisée dans le domaine de la gestion technique des bâtiments tertiaires et industriels, notre société développe
Votre Partenaire pour vos projets d Automatismes de bâtiments Tertiaires et Industriels Spécialisée dans le domaine de la gestion technique des bâtiments tertiaires et industriels, notre société développe
Théâtre - Production théâtrale Description de cours
 Théâtre - Production théâtrale Description de cours SESSION 1 (TRONC COMMUN) Histoire de l'architecture L objectif du cours est de cerner les principaux styles de l histoire de l architecture. Le contenu
Théâtre - Production théâtrale Description de cours SESSION 1 (TRONC COMMUN) Histoire de l'architecture L objectif du cours est de cerner les principaux styles de l histoire de l architecture. Le contenu
Organisé par StatSoft France et animé par Dr Diego Kuonen, expert en techniques de data mining.
 2 jours : Mardi 15 et mercredi 16 novembre 2005 de 9 heures 30 à 17 heures 30 Organisé par StatSoft France et animé par Dr Diego Kuonen, expert en techniques de data mining. Madame, Monsieur, On parle
2 jours : Mardi 15 et mercredi 16 novembre 2005 de 9 heures 30 à 17 heures 30 Organisé par StatSoft France et animé par Dr Diego Kuonen, expert en techniques de data mining. Madame, Monsieur, On parle
Projet Robot Centaure
 Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Pierre De Dobbeleer. Spécialiste Project Management, Electronique, Réseaux et télécommunications
 Pierre De Dobbeleer Contact: 11 rue Rogier, 5000 Namur 3éme étage Tel: +32 471 37 64 82 Age: 46 ans Divorcé, 2 enfants Spécialiste Project Management, Electronique, Réseaux et télécommunications Domaines
Pierre De Dobbeleer Contact: 11 rue Rogier, 5000 Namur 3éme étage Tel: +32 471 37 64 82 Age: 46 ans Divorcé, 2 enfants Spécialiste Project Management, Electronique, Réseaux et télécommunications Domaines
Introduction au datamining
 Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Conseils pour l évaluation et l attribution de la note
 Entreprise formatrice Candidat/-e Téléphone: Téléphone: Ce document ne doit en aucun cas être montré au candidat après l attribution des points. Conseils pour l évaluation et l attribution de la note Documentation
Entreprise formatrice Candidat/-e Téléphone: Téléphone: Ce document ne doit en aucun cas être montré au candidat après l attribution des points. Conseils pour l évaluation et l attribution de la note Documentation
Une application de méthodes inverses en astrophysique : l'analyse de l'histoire de la formation d'étoiles dans les galaxies
 Une application de méthodes inverses en astrophysique : l'analyse de l'histoire de la formation d'étoiles dans les galaxies Ariane Lançon (Observatoire de Strasbourg) en collaboration avec: Jean-Luc Vergely,
Une application de méthodes inverses en astrophysique : l'analyse de l'histoire de la formation d'étoiles dans les galaxies Ariane Lançon (Observatoire de Strasbourg) en collaboration avec: Jean-Luc Vergely,
Instruments de signalisation moteur et. Système central d'alarme. Instruments de signalisation moteur (suite) Variation des paramètres :
 Variation des paramètres :") Instruments de signalisation moteur et Système central d'alarme Instruments de signalisation moteur et Système central d'alarme Systèmes :- L'état des portes Détecteurs et extincteurs de feu Système de
Instruments de signalisation moteur et Système central d'alarme Instruments de signalisation moteur et Système central d'alarme Systèmes :- L'état des portes Détecteurs et extincteurs de feu Système de
LES TROUBLES DU GRAPHISME LA RÉÉDUCATION: QUAND ET COMMENT PASSER PAR L ORDINATEUR?
 LES TROUBLES DU GRAPHISME LA RÉÉDUCATION: QUAND ET COMMENT PASSER PAR L ORDINATEUR? BUJWID Alexandra Ergothérapeute SMPRE CRTLA CHU RENNES Octobre 2012 L écriture est un geste complexe L écriture est une
LES TROUBLES DU GRAPHISME LA RÉÉDUCATION: QUAND ET COMMENT PASSER PAR L ORDINATEUR? BUJWID Alexandra Ergothérapeute SMPRE CRTLA CHU RENNES Octobre 2012 L écriture est un geste complexe L écriture est une
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Concilier haute sécurité et clarté Picard Serrures innove et présente
 Information Presse Février 2013 Concilier haute sécurité et clarté Picard Serrures innove et présente Diamant Luminance Une nouvelle porte blindée vitrée pavillonnaire motorisée avec double bâti à rupture
Information Presse Février 2013 Concilier haute sécurité et clarté Picard Serrures innove et présente Diamant Luminance Une nouvelle porte blindée vitrée pavillonnaire motorisée avec double bâti à rupture
2. DIFFÉRENTS TYPES DE RÉSEAUX
 TABLE DES MATIÈRES 1. INTRODUCTION 1 2. GÉNÉRALITÉS 5 1. RÔLES DES RÉSEAUX 5 1.1. Objectifs techniques 5 1.2. Objectifs utilisateurs 6 2. DIFFÉRENTS TYPES DE RÉSEAUX 7 2.1. Les réseaux locaux 7 2.2. Les
TABLE DES MATIÈRES 1. INTRODUCTION 1 2. GÉNÉRALITÉS 5 1. RÔLES DES RÉSEAUX 5 1.1. Objectifs techniques 5 1.2. Objectifs utilisateurs 6 2. DIFFÉRENTS TYPES DE RÉSEAUX 7 2.1. Les réseaux locaux 7 2.2. Les
Action ou Réalisation Investissement et Pensée
 Déployer une activité dense et précise d aide aux apprentissages Eps Action ou Réalisation Investissement et Pensée Contexte d enseignement : du N1 au N4 tout public Rappels théoriques Selon Claude Volant,
Déployer une activité dense et précise d aide aux apprentissages Eps Action ou Réalisation Investissement et Pensée Contexte d enseignement : du N1 au N4 tout public Rappels théoriques Selon Claude Volant,
La Gestion Technique Centralisée. Qu est ce que c est? A quoi ça sert?
 La Gestion Technique Centralisée. Qu est ce que c est? A quoi ça sert? Cet article a pour objectif de rappeler les notions principales relatives à la Gestion Technique Centralisée. Mais qu entend on par
La Gestion Technique Centralisée. Qu est ce que c est? A quoi ça sert? Cet article a pour objectif de rappeler les notions principales relatives à la Gestion Technique Centralisée. Mais qu entend on par
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Notions et définitions utiles
 Notions et définitions utiles 1 Notions et définitions utiles I. Notions d usage 1. La notion de compétitivité. La notion de «compétitivité» est la symbolique de l enjeu de développement des entreprises.
Notions et définitions utiles 1 Notions et définitions utiles I. Notions d usage 1. La notion de compétitivité. La notion de «compétitivité» est la symbolique de l enjeu de développement des entreprises.
Caractérisation de défauts par Magnétoscopie, Ressuage, Courants de Foucault
 Page 1 25 octobre 2012 Journée «Contrôle non destructif et caractérisation de défauts» Caractérisation de défauts par Magnétoscopie, Ressuage, Courants de Foucault Henri Walaszek sqr@cetim.fr Tel 0344673324
Page 1 25 octobre 2012 Journée «Contrôle non destructif et caractérisation de défauts» Caractérisation de défauts par Magnétoscopie, Ressuage, Courants de Foucault Henri Walaszek sqr@cetim.fr Tel 0344673324
P R E S E N T A T I O N E T E V A L U A T I O N P R O G R A M M E D E P R E V E N T I O N «P A R L E R»
 P R E S E N T A T I O N E T E V A L U A T I O N P R O G R A M M E D E P R E V E N T I O N «P A R L E R» Parler Apprendre Réfléchir Lire Ensemble pour Réussir Pascal BRESSOUX et Michel ZORMAN Laboratoire
P R E S E N T A T I O N E T E V A L U A T I O N P R O G R A M M E D E P R E V E N T I O N «P A R L E R» Parler Apprendre Réfléchir Lire Ensemble pour Réussir Pascal BRESSOUX et Michel ZORMAN Laboratoire
Les Méthodes Agiles. description et rapport à la Qualité. Benjamin Joguet Rémi Perrot Guillaume Tourgis
 Les Méthodes Agiles description et rapport à la Qualité Benjamin Joguet Rémi Perrot Guillaume Tourgis 1 Plan Présentation générale d'agile Qu'est ce qu'une méthode Agile? Le manifeste Les valeurs Les principes
Les Méthodes Agiles description et rapport à la Qualité Benjamin Joguet Rémi Perrot Guillaume Tourgis 1 Plan Présentation générale d'agile Qu'est ce qu'une méthode Agile? Le manifeste Les valeurs Les principes
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité. * Le meilleur de l emballage
 : Détection visuelle d objets et inspection qualité. * Le meilleur de l emballage") Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité * * Le meilleur de l emballage MVS Composants Domaines d application Données techniques Automatisation efficace de la production
Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité * * Le meilleur de l emballage MVS Composants Domaines d application Données techniques Automatisation efficace de la production
Kardó. Une combinaison infinie de lumiere
 Kardó Une combinaison infinie de lumiere CONCEPT Design: eer architectural design, Belgique 2 - Kardó Kardó est un système d éclairage spécial qui permet de s adapter à l architecture à travers tout le
Kardó Une combinaison infinie de lumiere CONCEPT Design: eer architectural design, Belgique 2 - Kardó Kardó est un système d éclairage spécial qui permet de s adapter à l architecture à travers tout le
AnaXagora LMS v3.0. Guide d utilisation
 AnaXagora LMS v3.0 Guide d utilisation Sommaire 1. PRESENTATION DE LA PLATE-FORME D APPRENTISSAGE ANAXAGORA...3 2. ARCHITECTURE FONCTIONNELLE...5 3. L APPRENTISSAGE...6 3.1. L ESPACE DE TRAVAIL...6 3.1.1.
AnaXagora LMS v3.0 Guide d utilisation Sommaire 1. PRESENTATION DE LA PLATE-FORME D APPRENTISSAGE ANAXAGORA...3 2. ARCHITECTURE FONCTIONNELLE...5 3. L APPRENTISSAGE...6 3.1. L ESPACE DE TRAVAIL...6 3.1.1.
Fig. 1 Le détecteur de LHCb. En bas à gauche : schématiquement ; En bas à droite: «Event Display» développé au LAL.
 LHCb est l'une des expériences installées sur le LHC. Elle recherche la physique au-delà du Modèle standard en étudiant les mésons Beaux et Charmés. L accent est mis entre autres sur l étude de la violation
LHCb est l'une des expériences installées sur le LHC. Elle recherche la physique au-delà du Modèle standard en étudiant les mésons Beaux et Charmés. L accent est mis entre autres sur l étude de la violation
ANALYSE DU RISQUE DE CRÉDIT
 ANALYSE DU RISQUE DE CRÉDIT Banque & Marchés Cécile Kharoubi Professeur de Finance ESCP Europe Philippe Thomas Professeur de Finance ESCP Europe TABLE DES MATIÈRES Introduction... 15 Chapitre 1 Le risque
ANALYSE DU RISQUE DE CRÉDIT Banque & Marchés Cécile Kharoubi Professeur de Finance ESCP Europe Philippe Thomas Professeur de Finance ESCP Europe TABLE DES MATIÈRES Introduction... 15 Chapitre 1 Le risque
AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES
 1 AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES 2 Axes de recherche L activité du DIM LSC concerne la méthodologie de la conception et le développement de systèmes à forte
1 AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES 2 Axes de recherche L activité du DIM LSC concerne la méthodologie de la conception et le développement de systèmes à forte
Repères Gérer la capacité
 Repères Gérer la http://www.agilecom.fr Les enjeux de la gestion de la Réaliser cet ajustement est un effort continuel : La stratégie de l entreprise évolue avec la conjoncture ; Les métiers développent
Repères Gérer la http://www.agilecom.fr Les enjeux de la gestion de la Réaliser cet ajustement est un effort continuel : La stratégie de l entreprise évolue avec la conjoncture ; Les métiers développent
LES FONCTIONS DE SURVEILLANCE DES FICHIERS
 SYSLOG and APPLICATION LOGS Knowledge Module for PATROL - Data Sheet Version 1.5 Développé par http://www.axivia.com/ PRESENTATION DU PRODUIT SYSLOG and APPLICATION LOGS Knowledge Module for PATROL est
SYSLOG and APPLICATION LOGS Knowledge Module for PATROL - Data Sheet Version 1.5 Développé par http://www.axivia.com/ PRESENTATION DU PRODUIT SYSLOG and APPLICATION LOGS Knowledge Module for PATROL est
Présentation d HyperV
 Virtualisation sous Windows 2008 Présentation d HyperV Agenda du module Présentation d Hyper-V Installation d Hyper-V Configuration d Hyper-V Administration des machines virtuelles Offre de virtualisation
Virtualisation sous Windows 2008 Présentation d HyperV Agenda du module Présentation d Hyper-V Installation d Hyper-V Configuration d Hyper-V Administration des machines virtuelles Offre de virtualisation
Profil d études détaillé. Section : Informatique et systèmes Finalité : Technologie de l informatique
 Section : Informatique et systèmes Finalité : Technologie de l informatique Page 1/6 1. Introduction L enseignement de la Haute Ecole Louvain en Hainaut donne la place centrale à l étudiant. Celui-ci trouvera
Section : Informatique et systèmes Finalité : Technologie de l informatique Page 1/6 1. Introduction L enseignement de la Haute Ecole Louvain en Hainaut donne la place centrale à l étudiant. Celui-ci trouvera
Fine dosing Opti-feeder FD- SPA
 MICRO-DOSEURS PONDERAUX DE HAUTE PRECISION Fine dosing Opti-feeder FD- SPA MCPI Fine dosing est une technologie dédiée au dosage et saupoudrage de haute précision. La technologie MCPI Fine dosing est protégée
MICRO-DOSEURS PONDERAUX DE HAUTE PRECISION Fine dosing Opti-feeder FD- SPA MCPI Fine dosing est une technologie dédiée au dosage et saupoudrage de haute précision. La technologie MCPI Fine dosing est protégée
UNIVERSITÉ DE MONTRÉAL DÉPARTEMENT DE SOCIOLOGIE ************* Cours de niveau gradué en méthodes quantitatives *************
 ************* Cours de niveau gradué en méthodes quantitatives ************* SOL 6210 - Analyse quantitative avancée Le séminaire d analyse quantitative avancée se donne en classe une fois par année. Chaque
************* Cours de niveau gradué en méthodes quantitatives ************* SOL 6210 - Analyse quantitative avancée Le séminaire d analyse quantitative avancée se donne en classe une fois par année. Chaque
RÉSUMÉ DESCRIPTIF DE LA CERTIFICATION (FICHE RÉPERTOIRE)
") RÉSUMÉ DESCRIPTIF DE LA CERTIFICATION (FICHE RÉPERTOIRE) Intitulé (cadre 1) Domaine : Sciences, Technologies, Santé Licence professionnelle : Dénomination Nationale «Systèmes informatiques et logiciels»
RÉSUMÉ DESCRIPTIF DE LA CERTIFICATION (FICHE RÉPERTOIRE) Intitulé (cadre 1) Domaine : Sciences, Technologies, Santé Licence professionnelle : Dénomination Nationale «Systèmes informatiques et logiciels»
Master Marketing et Pratiques Commerciales parcours Management de la marque et communication Apprentissage Master 2
 Master Marketing et Pratiques Commerciales parcours Management de la marque et communication Apprentissage Master 2 2014/2015 UE1 MANAGEMENT STRATÉGIQUE Jean-Pierre Helfer Comprendre la posture stratégique
Master Marketing et Pratiques Commerciales parcours Management de la marque et communication Apprentissage Master 2 2014/2015 UE1 MANAGEMENT STRATÉGIQUE Jean-Pierre Helfer Comprendre la posture stratégique
Limitations of the Playstation 3 for High Performance Cluster Computing
 Introduction Plan Limitations of the Playstation 3 for High Performance Cluster Computing July 2007 Introduction Plan Introduction Intérêts de la PS3 : rapide et puissante bon marché L utiliser pour faire
Introduction Plan Limitations of the Playstation 3 for High Performance Cluster Computing July 2007 Introduction Plan Introduction Intérêts de la PS3 : rapide et puissante bon marché L utiliser pour faire
la solution sans fil de controle de l eclairage public par internet
 la solution sans fil de controle de l eclairage public par internet PRESENTATION LUX MONITOR QU EST CE QUE C EST? LUX MONITOR EST UN SYSTÈME DE CONTRÔLE DE L ÉCLAIRAGE PUBLIC : Maîtrisez instantanément
la solution sans fil de controle de l eclairage public par internet PRESENTATION LUX MONITOR QU EST CE QUE C EST? LUX MONITOR EST UN SYSTÈME DE CONTRÔLE DE L ÉCLAIRAGE PUBLIC : Maîtrisez instantanément
CENTRE DE TECHNOLOGIES AVANCEES EN ELECTRICITE RESIDENTIELLE ET INDUSTRIELLE INSTITUT DES ARTS ET METIERS
 CENTRE DE TECHNOLOGIES AVANCEES EN ELECTRICITE RESIDENTIELLE ET INDUSTRIELLE INSTITUT DES ARTS ET METIERS Campus des Arts et Métiers Chaque module est lié à un type d équipement mis à disposition par le
CENTRE DE TECHNOLOGIES AVANCEES EN ELECTRICITE RESIDENTIELLE ET INDUSTRIELLE INSTITUT DES ARTS ET METIERS Campus des Arts et Métiers Chaque module est lié à un type d équipement mis à disposition par le
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Manuel de l utilisateur NXT 2.0
 Manuel de l utilisateur NXT 2.0 Introduction BIENVENUE DANS L UNIVERS DE LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education représente la nouvelle génération de robotique éducative, qui permet aux élèves
Manuel de l utilisateur NXT 2.0 Introduction BIENVENUE DANS L UNIVERS DE LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education représente la nouvelle génération de robotique éducative, qui permet aux élèves
Consulter le Modèle d Accessibilité de référence. Le modèle a considéré quatre types de diversité fonctionnelle :
 Consulter le Modèle d Accessibilité de référence. Le modèle a considéré quatre types de diversité fonctionnelle : Personnes ayant une diversité fonctionnelle physique Personnes ayant une diversité fonctionnelle
Consulter le Modèle d Accessibilité de référence. Le modèle a considéré quatre types de diversité fonctionnelle : Personnes ayant une diversité fonctionnelle physique Personnes ayant une diversité fonctionnelle
RCL-Light et RCL-Blind : Disponibles à la livraison Pour un éclairage optimal en toutes circonstances! Disponibles à la livraison!
 Notification de livraison Lignes RCL-Light/Blind Juillet 2013 Disponibles à la livraison! RCL-Light et RCL-Blind : Disponibles à la livraison Pour un éclairage optimal en toutes circonstances! Sommaire
Notification de livraison Lignes RCL-Light/Blind Juillet 2013 Disponibles à la livraison! RCL-Light et RCL-Blind : Disponibles à la livraison Pour un éclairage optimal en toutes circonstances! Sommaire
TMS des agents de l Etat en abattoir de boucherie. Amandine Gautier 13 juin 2012
 TMS des agents de l Etat en abattoir de boucherie Amandine Gautier 13 juin 2012 1. Commande Les TMS première cause de MP dans le secteur abattage CHSM enquête par questionnaire sur les TMS des agents de
TMS des agents de l Etat en abattoir de boucherie Amandine Gautier 13 juin 2012 1. Commande Les TMS première cause de MP dans le secteur abattage CHSM enquête par questionnaire sur les TMS des agents de
Master Informatique Aix-Marseille Université
 Aix-Marseille Université http://masterinfo.univ-mrs.fr/ Département Informatique et Interactions UFR Sciences Laboratoire d Informatique Fondamentale Laboratoire des Sciences de l Information et des Systèmes
Aix-Marseille Université http://masterinfo.univ-mrs.fr/ Département Informatique et Interactions UFR Sciences Laboratoire d Informatique Fondamentale Laboratoire des Sciences de l Information et des Systèmes
Robotique Mobile. David Filliat
 Robotique Mobile David Filliat Avril 2012 David FILLIAT École Nationale Supérieure de Techniques Avancées ParisTech Robotique Mobile 2 Cette création est mise à disposition selon le Contrat Paternité-Pas
Robotique Mobile David Filliat Avril 2012 David FILLIAT École Nationale Supérieure de Techniques Avancées ParisTech Robotique Mobile 2 Cette création est mise à disposition selon le Contrat Paternité-Pas
GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET
 GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET 1 Tianxiao LIU Licence Professionnelle Réseaux & Sécurité Université de Cergy-Pontoise http://depinfo.u-cergy.fr/~tliu/lpg.php PLAN Objectif et
GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET 1 Tianxiao LIU Licence Professionnelle Réseaux & Sécurité Université de Cergy-Pontoise http://depinfo.u-cergy.fr/~tliu/lpg.php PLAN Objectif et
Présentation du 23 mai 2013 Barcarolle/Prangins AGENDA. 1. INTRODUCTION 2. CALYPS 3. QlikView by QlikTech 4. ANALYSE AVEC QLIKVIEW
 Présentation du 23 mai 2013 Barcarolle/Prangins CALYPS SA : 5/2013 Tony Germini CEO Gérald Tedeschi Sales Director Nicolas Paccaud Senior Consultant Alessandro Baseggio Senior Consultant AGENDA 1. INTRODUCTION
Présentation du 23 mai 2013 Barcarolle/Prangins CALYPS SA : 5/2013 Tony Germini CEO Gérald Tedeschi Sales Director Nicolas Paccaud Senior Consultant Alessandro Baseggio Senior Consultant AGENDA 1. INTRODUCTION
Glossaire technique Veditec
 Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
CHAPITRE I. Modélisation de processus et estimation des paramètres d un modèle
 CHAPITRE I Modélisation de processus et estimation des paramètres d un modèle I. INTRODUCTION. Dans la première partie de ce chapitre, nous rappelons les notions de processus et de modèle, ainsi que divers
CHAPITRE I Modélisation de processus et estimation des paramètres d un modèle I. INTRODUCTION. Dans la première partie de ce chapitre, nous rappelons les notions de processus et de modèle, ainsi que divers
La métrologie au laboratoire. vigitemp 10. centrale de surveillance et de traçabilité vigitemp kit de cartographie vigicart
 La métrologie au laboratoire vigitemp 10 centrale de surveillance et de traçabilité vigitemp kit de cartographie vigicart La métrologie au laboratoire vigitemp 10 Base de données Utilisateur Principe général
La métrologie au laboratoire vigitemp 10 centrale de surveillance et de traçabilité vigitemp kit de cartographie vigicart La métrologie au laboratoire vigitemp 10 Base de données Utilisateur Principe général
Cours 1 : Qu est-ce que la programmation?
 1/65 Introduction à la programmation Cours 1 : Qu est-ce que la programmation? Yann Régis-Gianas yrg@pps.univ-paris-diderot.fr Université Paris Diderot Paris 7 2/65 1. Sortez un appareil qui peut se rendre
1/65 Introduction à la programmation Cours 1 : Qu est-ce que la programmation? Yann Régis-Gianas yrg@pps.univ-paris-diderot.fr Université Paris Diderot Paris 7 2/65 1. Sortez un appareil qui peut se rendre
C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. www.sensopart.com
 C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. 22 2 Déballer, paramétrer et démarrer : les capteurs de vision n ont jamais été aussi puissants pour une manipulation
C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. 22 2 Déballer, paramétrer et démarrer : les capteurs de vision n ont jamais été aussi puissants pour une manipulation
Apprentissage Automatique
 Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
CRÉER UN COURS EN LIGNE
 Anne DELABY CRÉER UN COURS EN LIGNE Deuxième édition, 2006, 2008 ISBN : 978-2-212-54153-3 2 Que recouvre le concept d interactivité? Dans une perspective de cours en ligne, une activité interactive est
Anne DELABY CRÉER UN COURS EN LIGNE Deuxième édition, 2006, 2008 ISBN : 978-2-212-54153-3 2 Que recouvre le concept d interactivité? Dans une perspective de cours en ligne, une activité interactive est
MODE OPÉRATOIRE. VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.
 Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.") VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
UNIVERSITE DE REIMS CHAMPAGNE ARDENNE MASTER ELECTRONIQUE ELECTROTECHNIQUE AUTOMATIQUE ET INFORMATIQUE INDUSTRIELLE VD2
 UNIVERSITE DE REIMS CHAMPAGNE ARDENNE MASTER ELECTRONIQUE ELECTROTECHNIQUE AUTOMATIQUE ET INFORMATIQUE INDUSTRIELLE VD2 BRUNET Jean-Marie Chef de Projet (Etudiant) LEFEVRE Alexandre Coéquipier (Etudiant)
UNIVERSITE DE REIMS CHAMPAGNE ARDENNE MASTER ELECTRONIQUE ELECTROTECHNIQUE AUTOMATIQUE ET INFORMATIQUE INDUSTRIELLE VD2 BRUNET Jean-Marie Chef de Projet (Etudiant) LEFEVRE Alexandre Coéquipier (Etudiant)
GUIDE DE L ENSEIGNANT
 Au ménage! GUIDE DE L ENSEIGNANT 2010-2011 -1- Description de la situation d apprentissage Préparation Activité 1 À leur entrée en classe, les élèves découvrent quatre bouteilles sur le bureau de l enseignante
Au ménage! GUIDE DE L ENSEIGNANT 2010-2011 -1- Description de la situation d apprentissage Préparation Activité 1 À leur entrée en classe, les élèves découvrent quatre bouteilles sur le bureau de l enseignante
JOG : une approche haut niveau des systèmes embarqués via Armadeus et Java
 JOG : une approche haut niveau des systèmes embarqués via Armadeus et Java Resumé Olivier Reynet 1, Jean-Christophe Le Lann 1, Benoît Clément 1 1 ENSIETA, 2, rue François Verny, 29200 Brest - France olivier.reynet@no-spam@ensieta.fr
JOG : une approche haut niveau des systèmes embarqués via Armadeus et Java Resumé Olivier Reynet 1, Jean-Christophe Le Lann 1, Benoît Clément 1 1 ENSIETA, 2, rue François Verny, 29200 Brest - France olivier.reynet@no-spam@ensieta.fr
2012 / 2013. Excellence. Technicité. Sagesse
 2012 / 2013 Excellence Technicité Sagesse Audit Conseil >> Présentation d ATHENA ATHENA est une société de services fondée en 2007 offrant des prestations dans les domaines de la sécurité informatique
2012 / 2013 Excellence Technicité Sagesse Audit Conseil >> Présentation d ATHENA ATHENA est une société de services fondée en 2007 offrant des prestations dans les domaines de la sécurité informatique
Efficacité énergétique pour les particuliers : une solution pour le monitoring énergétique
 Efficacité énergétique pour les particuliers : une solution pour le monitoring énergétique Orange Labs Jérôme Descos, Recherche & Développement 13 mars 2012, présentation au Colloque Energ&TIC² travaux
Efficacité énergétique pour les particuliers : une solution pour le monitoring énergétique Orange Labs Jérôme Descos, Recherche & Développement 13 mars 2012, présentation au Colloque Energ&TIC² travaux
Cycle de formation certifiante Sphinx
 Cycle de formation certifiante Sphinx 28, 29, 30 Mai 2015 Initiation, Approfondissement et Maîtrise Etudes qualitatives / quantitatives Initiation, approfondissement et maîtrise des études qualitatives
Cycle de formation certifiante Sphinx 28, 29, 30 Mai 2015 Initiation, Approfondissement et Maîtrise Etudes qualitatives / quantitatives Initiation, approfondissement et maîtrise des études qualitatives
1 Architecture du cœur ARM Cortex M3. Le cœur ARM Cortex M3 sera présenté en classe à partir des éléments suivants :
 GIF-3002 SMI et Architecture du microprocesseur Ce cours discute de l impact du design du microprocesseur sur le système entier. Il présente d abord l architecture du cœur ARM Cortex M3. Ensuite, le cours
GIF-3002 SMI et Architecture du microprocesseur Ce cours discute de l impact du design du microprocesseur sur le système entier. Il présente d abord l architecture du cœur ARM Cortex M3. Ensuite, le cours
Vertec Engineering L ERP professionnel pour ingénieurs
 Vertec Engineering L ERP professionnel pour ingénieurs Gestion simple des projets, clients et prestations la solution modulaire et complète destinée aux ingénieurs Vertec Engineering couvre en un produit
Vertec Engineering L ERP professionnel pour ingénieurs Gestion simple des projets, clients et prestations la solution modulaire et complète destinée aux ingénieurs Vertec Engineering couvre en un produit
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les