Polynômes et optimisation convexe en commande robuste. Didier HENRION. LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ.
|
|
|
- Blanche Paquette
- il y a 7 ans
- Total affichages :
Transcription
1 Polynômes et optimisation convexe en commande robuste Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Décembre 2007
2 Projet de recherche polynômes géométrie algébrique réelle effective optimisation convexe et non-convexe LMI commande robuste outils numériques logiciels domaine public prototypes
3 Projet de recherche polynômes géométrie algébrique réelle effective optimisation convexe et non-convexe LMI commande robuste outils numériques logiciels domaine public prototypes
4 Projet de recherche polynômes géométrie algébrique réelle effective optimisation convexe et non-convexe LMI commande robuste outils numériques logiciels domaine public prototypes
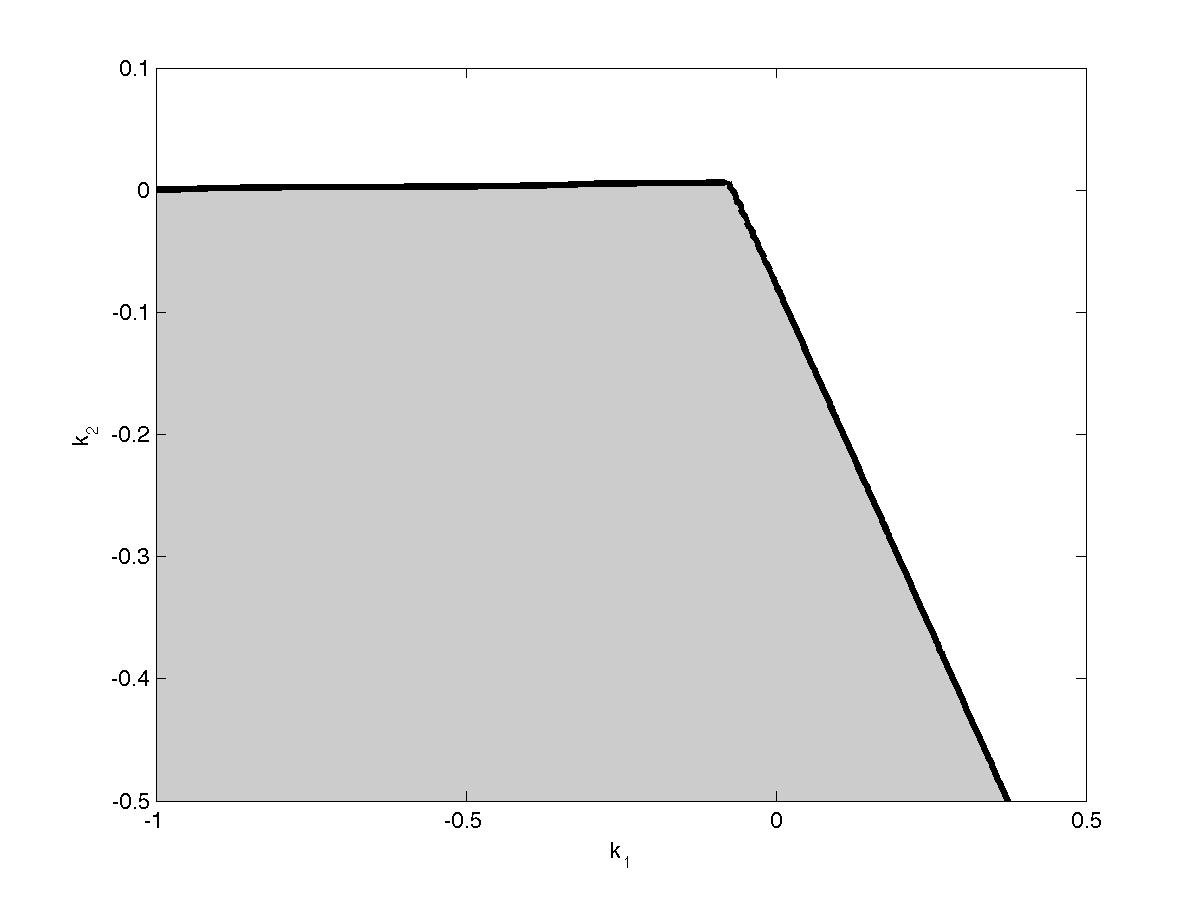
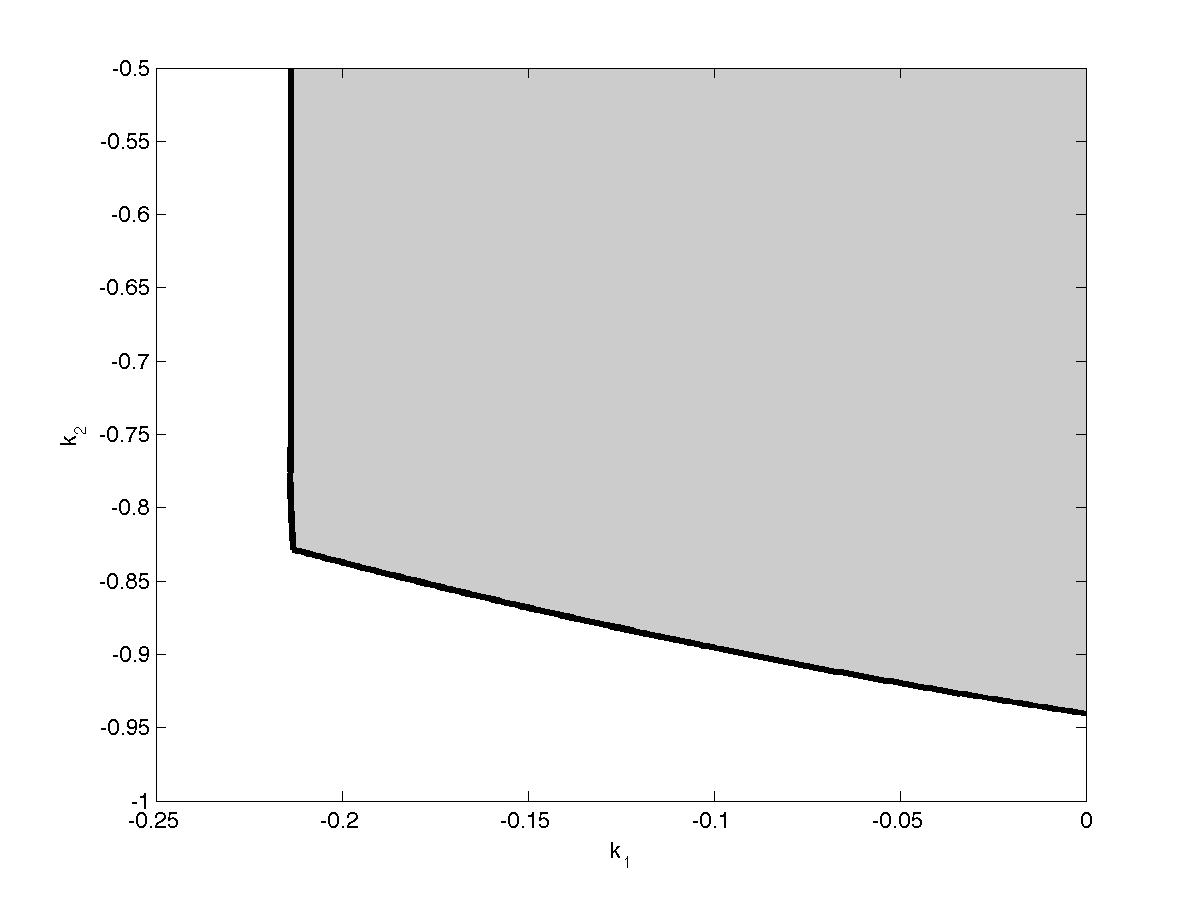
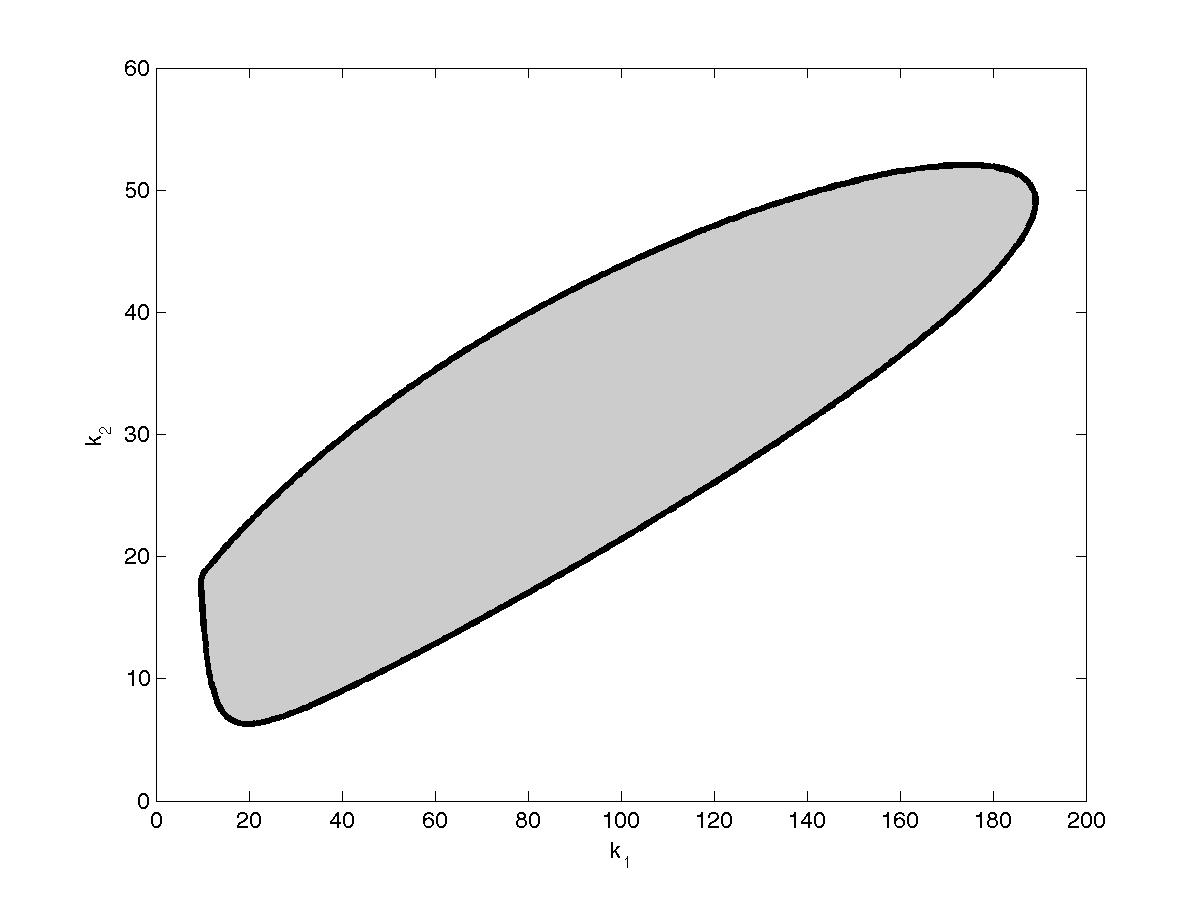
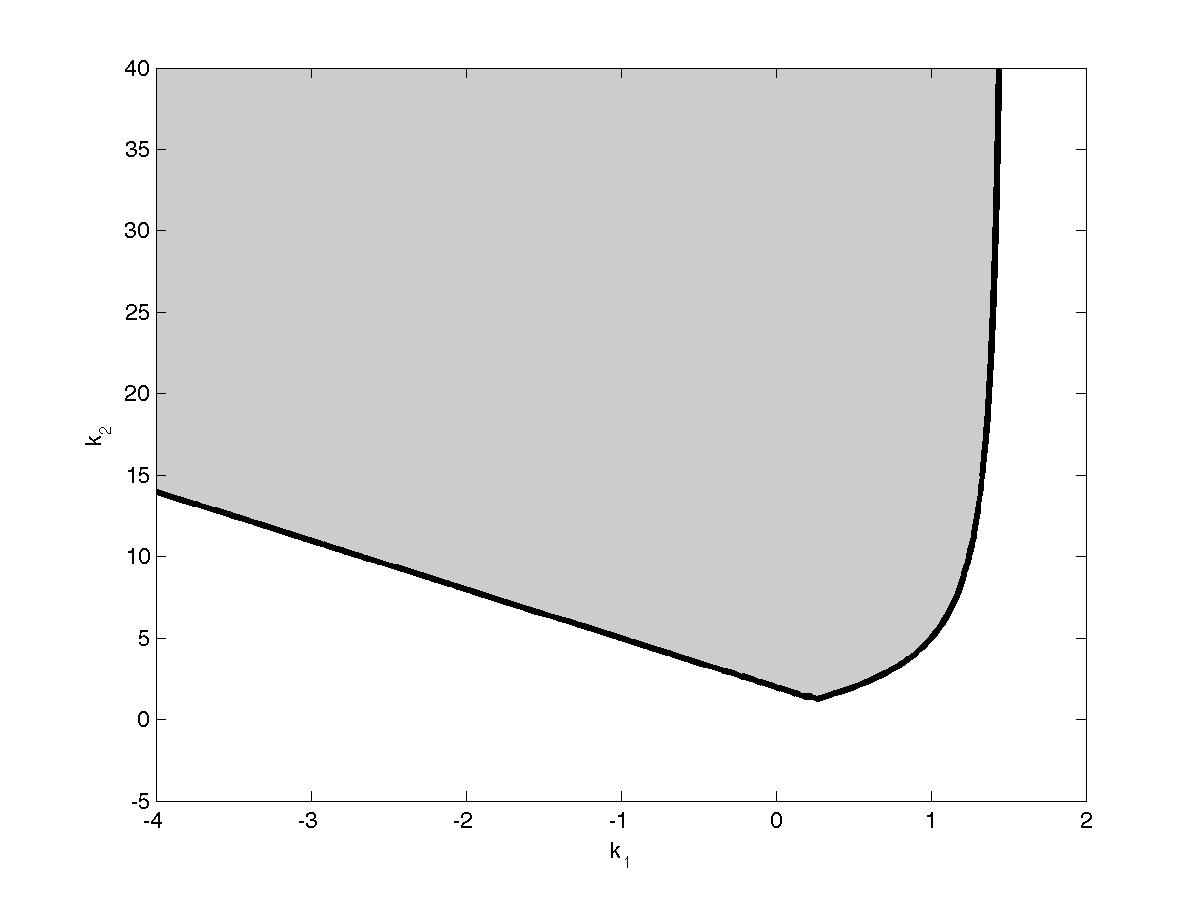
5 Observation COMPLIB: plus d une centaine de problèmes de retour de sortie statique (SOF) Etant donnés A,B,C trouver K tel que A + BKC stable 7 problèmes bi-dimensionnels K R 2 Visualisation facile de l ensemble des correcteurs stabilisants
6
7
8

9
10
11

12
13 Convexité cachée Pour 6 problèmes sur 7, l ensemble des correcteurs stabilisants semble convexe Etant donné la difficulté notoire, et en particulier la non-convexité du problème SOF, est-ce fortuit? Convexité cachée?
14 Polynômes positifs..permettent d introduire les notions clefs de géométrie algébrique et d optimisation convexe pouvant être utiles en commande robuste Dans l ordre d exposition polynômes scalaires univariés polynômes matriciels univariés polynômes matriciels multivariés
15 Stabilité Polynôme univarié p(s) = p 0 + p 1 s + + p n s n R[s] Conditions sur les p i pour que p(s) soit stable (p.ex. toutes ses racines dans le demi-plan gauche) Critère d Hermite: version symétrique de Routh-Hurwitz Forme quadratique permettant de compter les racines
16 Bézoutien de a(w), b(w) R[w] via la forme bilinéaire h(v, w) = a(v)b(w) a(w)b(v) v w = résultant de a(w), b(w) = discriminant de la forme quadratique h(w, w) = déterminant de sa matrice symétrique H(a, b) Hermite: avec a(w) = Re p(jw), b(w) = Im p(jw) alors p(s) stable ssi H(a, b) = H(p) 0 Interprétation graphique: toutes les racines de a(w) et b(w) sont réelles et entrelacées
17 Critère d Hermite H(p) = α h α p α 0 inégalité matricielle quadratique non-convexe en p UNSTABLE q STABLE q 1
18 Relaxation Approximation convexe par l intérieur de l ensemble de stabilité On fixe un polynôme central référence q(s) stable, et on entrelace les racines de Re p(jw) et Im p(jw) par rapport aux racines de Re q(jw) et Im q(jw) Condition LMI en p obtenue via la positivité de matrices polynomiales univariées Pour les polynômes cubiques discrets on obtient..
19
20 SPR et lemme KYP Condition de positivité d une matrice polynomiale univariée sur une union de segments P (s) 0, s G Yakubovich (1970), Willems (1971) dans le cadre de la commande LQR, également utilisé en filtrage Condition LMI sur les coefficients de P (s) après introduction de variables additionnelles (relèvements = liftings)
 Commande de moteurs d avions (Snecma")
21 Commande H et LPV Extension aux performances en boucle fermée: H = positivité de matrice polynomiale univariée LPV = positivité de matrice polynomiale multivariée sur un compact (boîte, simplexe, polytope) Commande de moteurs d avions (Snecma )
22 Analyse de robustesse Soit p(s, q) un polynôme univarié en s dépendant d un vecteur q appartenant à un ensemble Q En supposant p(s, 0) stable, est-ce que p(s, q) reste stable pour tout q dans Q? Positivité robuste de la matrice de Hermite H(p, q) = positivité du polynôme multivarié det H(p, q) sur Q Problème non-convexe multi-extrémal (µ-analyse)
23 Retour de sortie statique (SOF) Recherche d une matrice K telle que p(s, k) = det(si A BKC) soit stable Revient à trouver K tel que la matrice de Hermite H(p, K) est définie positive Ici encore, positivité d une matrice polynomiale multivariée Comment appréhender de tels problèmes?
24 Une approche unifiée..proposée par J. B. Lasserre (2000) dans le cadre de l optimisation globale polynomiale min x sous p(x) x G avec p(x) = α p α x α polynôme multivarié de x R n et G = {x R n : G(x) C} ensemble semi-algébrique conique défini par G(x) = α G α x α matrice polynomiale symétrique multivariée et C cône convexe produit direct des cônes linéaire, quadratique et semi-défini
25 Linéarisation et mesures Le problème non-convexe non-linéaire dans R n min x sous p(x) x G est reformulé comme un problème convexe linéaire min p(x)dµ(x) µ G dans l espace infini-dimensionnel des mesures sur G Difficulté: comment représenter constructivement les mesures supportées sur un semi-algébrique conique?
26 Mesures et moments Si G est compact et admet une formulation particulière (valide pour les applications), alors une mesure µ est représentée par ses moments y α = ssi la séquence y = (y α ) satisfait G xα dµ(x) M(y) 0 M G (y) 0 où M(y) est la matrice des moments et M G (y) la matrice de localisation toutes deux symétriques et linéaires en y Section du cône semi-défini par un sous-espace affine
27 Formulation LMI Les matrices M(y) et M G (y), ainsi que la séquence y sont infini-dimensionnelles En tronquant y aux monômes de degré 2d au plus, on obtient un problème LMI min y α y α p α sous M(y) 0 M G (y) 0 qui est une relaxation convexe du problème polynomial non-convexe original Hiérarchie de relaxations LMI pour d = 1, 2, 3,...

28 Convergence A l aide de représentations de polynômes positifs comme des sommes de carrés (problème dual), on peut démontrer la convergence asympotique de la hiérarchie quand d Dans certains cas la convergence est assurée pour d fini (optima dans un idéal zéro-dimensionnel)
29 Certificat d optimalité Certificat numérique de convergence quand les rangs des partitions de la matrice des moments M(y) satisfont des équations récurrentes Extraction (de la variété) des optima globaux par décomposition spectrale de M(y) Augmentation rapide de la taille de y avec d mais en pratique, convergence rapide Les limitations actuelles viennent des solveurs LMI
30 Matrice intervalle avec Illustration: stabilité robuste A(q) = q q 2 q q 4 q Q = [ , ] [ , ] [2.0000, ] [ , ] Relaxation LMI d ordre d = 4 donne l optimum global certifié p = det H(q ) = atteint en q = [ , , , ] prouvant la stabilité robuste
31 Illustration: SOF Modèle HE1 de mouvement longitudinal d hélicoptère Relaxations LMI du problème min sous λ + ε k H(k) λ 3ème relaxation LMI (28 variables, temps CPU 1.8 sec) matrice des moments de rang un k 1 = , k 2 = certifie l optimum global et donc la stabilisation
32
33 Convexe ou non-convexe? Certains problèmes polynomiaux non-convexes admettent donc une reformulation convexe Le prix à payer est l introduction d un certain nombre de variables additionnelles (moments d ordres supérieurs) Géométriquement, la projection d un ensemble LMI génère l enveloppe convexe d un ensemble semi-algébrique non-convexe Difficile d estimer a priori le nombre de variables à projeter Dans certains cas inutile d introduire des variables..
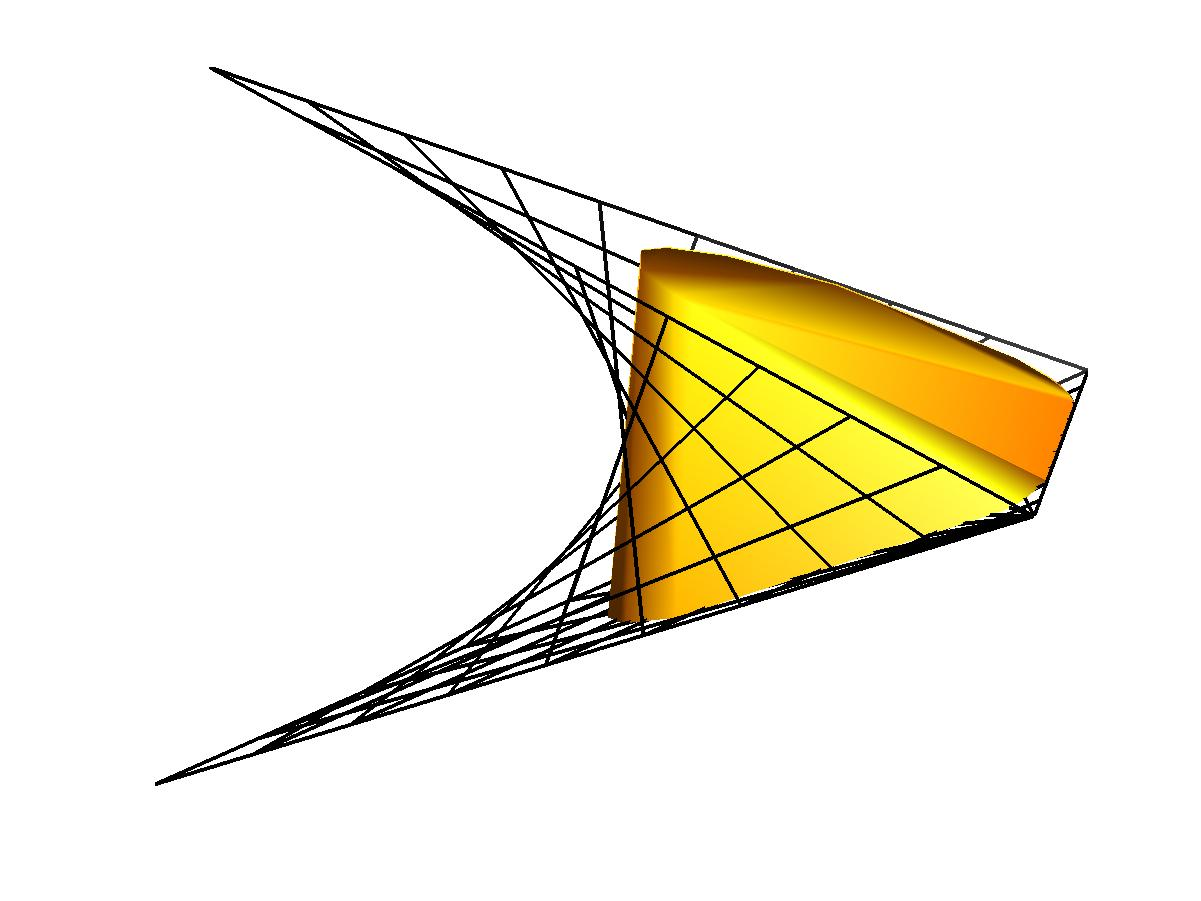
34 Convexité de SOF Revenons au problème SOF à 2 paramètres.. Pour quelles valeurs de k R 2 le polynôme de degré n est-il stable? p(s, k) = p 0 (s) + k 1 p 1 (s) + k 2 p 2 (s) Critère d Hermite H(k) 0 déterminant d Hermite factorisable h(k) = det H(k) = l(k)g(k) 2 avec l(k) affine et g(k) de degré n (preuve par les propriétés des Bézoutiens)
35 La courbe algébrique {k R 2 : g(k) = 0} est de genre nul, c est-à-dire rationnellement paramétrable k 1 = q 1(u) q 0 (u) k 2 = q 2(u) q 0 (u) et donc g(k) peut s écrire comme un résultant Bézoutien g(k) = det H(k 1 q 0 (u) q 1 (u), k 2 q 0 (u) q 2 (u)) = det(g 0 + k 1 G 1 + k 2 G 2 ) Si G 0 0 alors la région des k tels que est LMI donc convexe G 0 + k 1 G 1 + k 2 G 2 0
36 Exemple (Francis 1987) Stabilisation d un système scalaire (s 1)(s 2)/(s+1)(s 2 +s+1) par un correcteur PI k 1 + k 2 /s Après calcul des Bézoutiens, l ensemble des correcteurs stabilisants est la région LMI 2k k 1 54k k k k k k k k 1 0
37
38 Perspectives Relations entre ensembles semi-algébriques et LMI (représentations déterminantales) Analyse numérique pour les polynômes et les problèmes des moments (conditionnement, moments modifiés) Applications en automatique (version dynamique de la hiérarchie de relaxations LMI pour la commande optimale) Développements logiciels (GloptiPoly 3, problème généralisé des moments)
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Optimisation Discrète
 Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Optimisation des fonctions de plusieurs variables
 Optimisation des fonctions de plusieurs variables Hervé Hocquard Université de Bordeaux, France 8 avril 2013 Extrema locaux et globaux Définition On étudie le comportement d une fonction de plusieurs variables
Optimisation des fonctions de plusieurs variables Hervé Hocquard Université de Bordeaux, France 8 avril 2013 Extrema locaux et globaux Définition On étudie le comportement d une fonction de plusieurs variables
Bien lire l énoncé 2 fois avant de continuer - Méthodes et/ou Explications Réponses. Antécédents d un nombre par une fonction
 Antécédents d un nombre par une fonction 1) Par lecture graphique Méthode / Explications : Pour déterminer le ou les antécédents d un nombre a donné, on trace la droite (d) d équation. On lit les abscisses
Antécédents d un nombre par une fonction 1) Par lecture graphique Méthode / Explications : Pour déterminer le ou les antécédents d un nombre a donné, on trace la droite (d) d équation. On lit les abscisses
www.h-k.fr/publications/objectif-agregation
 «Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
«Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Polynômes à plusieurs variables. Résultant
 Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Polynômes à plusieurs variables. Résultant Christophe Ritzenthaler 1 Relations coefficients-racines. Polynômes symétriques Issu de [MS] et de [Goz]. Soit A un anneau intègre. Définition 1.1. Soit a A \
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Sujet 4: Programmation stochastique propriétés de fonction de recours
 Sujet 4: Programmation stochastique propriétés de fonction de recours MSE3313: Optimisation Stochastiqe Andrew J. Miller Dernière mise au jour: October 19, 2011 Dans ce sujet... 1 Propriétés de la fonction
Sujet 4: Programmation stochastique propriétés de fonction de recours MSE3313: Optimisation Stochastiqe Andrew J. Miller Dernière mise au jour: October 19, 2011 Dans ce sujet... 1 Propriétés de la fonction
Résolution de systèmes linéaires par des méthodes directes
 Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Résolution de systèmes linéaires par des méthodes directes J. Erhel Janvier 2014 1 Inverse d une matrice carrée et systèmes linéaires Ce paragraphe a pour objet les matrices carrées et les systèmes linéaires.
Formes quadratiques. 1 Formes quadratiques et formes polaires associées. Imen BHOURI. 1.1 Définitions
 Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Formes quadratiques Imen BHOURI 1 Ce cours s adresse aux étudiants de niveau deuxième année de Licence et à ceux qui préparent le capes. Il combine d une façon indissociable l étude des concepts bilinéaires
Cours d analyse numérique SMI-S4
 ours d analyse numérique SMI-S4 Introduction L objet de l analyse numérique est de concevoir et d étudier des méthodes de résolution de certains problèmes mathématiques, en général issus de problèmes réels,
ours d analyse numérique SMI-S4 Introduction L objet de l analyse numérique est de concevoir et d étudier des méthodes de résolution de certains problèmes mathématiques, en général issus de problèmes réels,
Calcul différentiel. Chapitre 1. 1.1 Différentiabilité
 Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Journées Télécom-UPS «Le numérique pour tous» David A. Madore. david.madore@enst.fr. 29 mai 2015
 et et Journées Télécom-UPS «Le numérique pour tous» David A. Madore Télécom ParisTech david.madore@enst.fr 29 mai 2015 1/31 et 2/31 : définition Un réseau de R m est un sous-groupe (additif) discret L
et et Journées Télécom-UPS «Le numérique pour tous» David A. Madore Télécom ParisTech david.madore@enst.fr 29 mai 2015 1/31 et 2/31 : définition Un réseau de R m est un sous-groupe (additif) discret L
Calcul fonctionnel holomorphe dans les algèbres de Banach
 Chapitre 7 Calcul fonctionnel holomorphe dans les algèbres de Banach L objet de ce chapitre est de définir un calcul fonctionnel holomorphe qui prolonge le calcul fonctionnel polynômial et qui respecte
Chapitre 7 Calcul fonctionnel holomorphe dans les algèbres de Banach L objet de ce chapitre est de définir un calcul fonctionnel holomorphe qui prolonge le calcul fonctionnel polynômial et qui respecte
Calcul matriciel. Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.
 est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.") 1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
Approximations variationelles des EDP Notes du Cours de M2
 Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Approximations variationelles des EDP Notes du Cours de M2 Albert Cohen Dans ce cours, on s intéresse à l approximation numérique d équations aux dérivées partielles linéaires qui admettent une formulation
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Dérivées d ordres supérieurs. Application à l étude d extrema.
 Chapitre 5 Dérivées d ordres supérieurs. Application à l étude d extrema. On s intéresse dans ce chapitre aux dérivées d ordre ou plus d une fonction de plusieurs variables. Comme pour une fonction d une
Chapitre 5 Dérivées d ordres supérieurs. Application à l étude d extrema. On s intéresse dans ce chapitre aux dérivées d ordre ou plus d une fonction de plusieurs variables. Comme pour une fonction d une
Correction de l examen de la première session
 de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
IV- Equations, inéquations dans R, Systèmes d équations
 IV- Equations, inéquations dans R, Systèmes d équations 1- Equation à une inconnue Une équation est une égalité contenant un nombre inconnu noté en général x et qui est appelé l inconnue. Résoudre l équation
IV- Equations, inéquations dans R, Systèmes d équations 1- Equation à une inconnue Une équation est une égalité contenant un nombre inconnu noté en général x et qui est appelé l inconnue. Résoudre l équation
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
Continuité d une fonction de plusieurs variables
 Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
Chapitre 2 Continuité d une fonction de plusieurs variables Maintenant qu on a défini la notion de limite pour des suites dans R n, la notion de continuité s étend sans problème à des fonctions de plusieurs
LES MÉTHODES DE POINT INTÉRIEUR 1
 Chapitre XIII LES MÉTHODES DE POINT INTÉRIEUR 1 XIII.1 Introduction Nous débutons par un rappel de la formulation standard d un problème d optimisation 2 linéaire et donnons un bref aperçu des différences
Chapitre XIII LES MÉTHODES DE POINT INTÉRIEUR 1 XIII.1 Introduction Nous débutons par un rappel de la formulation standard d un problème d optimisation 2 linéaire et donnons un bref aperçu des différences
Filtrage stochastique non linéaire par la théorie de représentation des martingales
 Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Introduction à l étude des Corps Finis
 Introduction à l étude des Corps Finis Robert Rolland (Résumé) 1 Introduction La structure de corps fini intervient dans divers domaines des mathématiques, en particulier dans la théorie de Galois sur
Introduction à l étude des Corps Finis Robert Rolland (Résumé) 1 Introduction La structure de corps fini intervient dans divers domaines des mathématiques, en particulier dans la théorie de Galois sur
Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre
 IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
IUFM du Limousin 2009-10 PLC1 Mathématiques S. Vinatier Rappels de cours Fonctions de plusieurs variables, intégrales multiples, et intégrales dépendant d un paramètre 1 Fonctions de plusieurs variables
Développements limités. Notion de développement limité
 MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
Définition 0,752 = 0,7 + 0,05 + 0,002 SYSTÈMES DE NUMÉRATION POSITIONNELS = 7 10 1 + 5 10 2 + 2 10 3
 8 Systèmes de numération INTRODUCTION SYSTÈMES DE NUMÉRATION POSITIONNELS Dans un système positionnel, le nombre de symboles est fixe On représente par un symbole chaque chiffre inférieur à la base, incluant
8 Systèmes de numération INTRODUCTION SYSTÈMES DE NUMÉRATION POSITIONNELS Dans un système positionnel, le nombre de symboles est fixe On représente par un symbole chaque chiffre inférieur à la base, incluant
Programme de la classe de première année MPSI
 Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
aux différences est appelé équation aux différences d ordre n en forme normale.
 MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
MODÉLISATION ET SIMULATION EQUATIONS AUX DIFFÉRENCES (I/II) 1. Rappels théoriques : résolution d équations aux différences 1.1. Équations aux différences. Définition. Soit x k = x(k) X l état scalaire
Exo7. Calculs de déterminants. Fiche corrigée par Arnaud Bodin. Exercice 1 Calculer les déterminants des matrices suivantes : Exercice 2.
 Eo7 Calculs de déterminants Fiche corrigée par Arnaud Bodin Eercice Calculer les déterminants des matrices suivantes : Correction Vidéo ( ) 0 6 7 3 4 5 8 4 5 6 0 3 4 5 5 6 7 0 3 5 4 3 0 3 0 0 3 0 0 0 3
Eo7 Calculs de déterminants Fiche corrigée par Arnaud Bodin Eercice Calculer les déterminants des matrices suivantes : Correction Vidéo ( ) 0 6 7 3 4 5 8 4 5 6 0 3 4 5 5 6 7 0 3 5 4 3 0 3 0 0 3 0 0 0 3
Exo7. Matrice d une application linéaire. Corrections d Arnaud Bodin.
 Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
CHAPITRE 5. Stratégies Mixtes
 CHAPITRE 5 Stratégies Mixtes Un des problèmes inhérents au concept d équilibre de Nash en stratégies pures est que pour certains jeux, de tels équilibres n existent pas. P.ex.le jeu de Pierre, Papier,
CHAPITRE 5 Stratégies Mixtes Un des problèmes inhérents au concept d équilibre de Nash en stratégies pures est que pour certains jeux, de tels équilibres n existent pas. P.ex.le jeu de Pierre, Papier,
ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab
 ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab notre compétence d'éditeur à votre service créée en juin 2010, Scilab enterprises propose services et support autour
ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab notre compétence d'éditeur à votre service créée en juin 2010, Scilab enterprises propose services et support autour
La programmation linéaire : une introduction. Qu est-ce qu un programme linéaire? Terminologie. Écriture mathématique
 La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Développements limités, équivalents et calculs de limites
 Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Carl-Louis-Ferdinand von Lindemann (1852-1939)
") Par Boris Gourévitch "L'univers de Pi" http://go.to/pi314 sai1042@ensai.fr Alors ça, c'est fort... Tranches de vie Autour de Carl-Louis-Ferdinand von Lindemann (1852-1939) est transcendant!!! Carl Louis
Par Boris Gourévitch "L'univers de Pi" http://go.to/pi314 sai1042@ensai.fr Alors ça, c'est fort... Tranches de vie Autour de Carl-Louis-Ferdinand von Lindemann (1852-1939) est transcendant!!! Carl Louis
Quelques contrôle de Première S
 Quelques contrôle de Première S Gilles Auriol auriolg@free.fr http ://auriolg.free.fr Voici l énoncé de 7 devoirs de Première S, intégralement corrigés. Malgré tout les devoirs et 5 nécessitent l usage
Quelques contrôle de Première S Gilles Auriol auriolg@free.fr http ://auriolg.free.fr Voici l énoncé de 7 devoirs de Première S, intégralement corrigés. Malgré tout les devoirs et 5 nécessitent l usage
FctsAffines.nb 1. Mathématiques, 1-ère année Edition 2007-2008. Fonctions affines
 FctsAffines.nb 1 Mathématiques, 1-ère année Edition 2007-2008 Fonctions affines Supports de cours de mathématiques de degré secondaire II, lien hpertete vers la page mère http://www.deleze.name/marcel/sec2/inde.html
FctsAffines.nb 1 Mathématiques, 1-ère année Edition 2007-2008 Fonctions affines Supports de cours de mathématiques de degré secondaire II, lien hpertete vers la page mère http://www.deleze.name/marcel/sec2/inde.html
Théorèmes de Point Fixe et Applications 1
 Théorèmes de Point Fixe et Applications 1 Victor Ginsburgh Université Libre de Bruxelles et CORE, Louvain-la-Neuve Janvier 1999 Published in C. Jessua, C. Labrousse et D. Vitry, eds., Dictionnaire des
Théorèmes de Point Fixe et Applications 1 Victor Ginsburgh Université Libre de Bruxelles et CORE, Louvain-la-Neuve Janvier 1999 Published in C. Jessua, C. Labrousse et D. Vitry, eds., Dictionnaire des
Espérance conditionnelle
 Espérance conditionnelle Samy Tindel Nancy-Université Master 1 - Nancy Samy T. (IECN) M1 - Espérance conditionnelle Nancy-Université 1 / 58 Plan 1 Définition 2 Exemples 3 Propriétés de l espérance conditionnelle
Espérance conditionnelle Samy Tindel Nancy-Université Master 1 - Nancy Samy T. (IECN) M1 - Espérance conditionnelle Nancy-Université 1 / 58 Plan 1 Définition 2 Exemples 3 Propriétés de l espérance conditionnelle
Théorème du point fixe - Théorème de l inversion locale
 Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Chapitre 7 Théorème du point fixe - Théorème de l inversion locale Dans ce chapitre et le suivant, on montre deux applications importantes de la notion de différentiabilité : le théorème de l inversion
Chapitre 3. Quelques fonctions usuelles. 1 Fonctions logarithme et exponentielle. 1.1 La fonction logarithme
 Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
avec des nombres entiers
 Calculer avec des nombres entiers Effectuez les calculs suivants.. + 9 + 9. Calculez. 9 9 Calculez le quotient et le rest. : : : : 0 :. : : 9 : : 9 0 : 0. 9 9 0 9. Calculez. 9 0 9. : : 0 : 9 : :. : : 0
Calculer avec des nombres entiers Effectuez les calculs suivants.. + 9 + 9. Calculez. 9 9 Calculez le quotient et le rest. : : : : 0 :. : : 9 : : 9 0 : 0. 9 9 0 9. Calculez. 9 0 9. : : 0 : 9 : :. : : 0
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE
 COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
4.2 Unités d enseignement du M1
 88 CHAPITRE 4. DESCRIPTION DES UNITÉS D ENSEIGNEMENT 4.2 Unités d enseignement du M1 Tous les cours sont de 6 ECTS. Modélisation, optimisation et complexité des algorithmes (code RCP106) Objectif : Présenter
88 CHAPITRE 4. DESCRIPTION DES UNITÉS D ENSEIGNEMENT 4.2 Unités d enseignement du M1 Tous les cours sont de 6 ECTS. Modélisation, optimisation et complexité des algorithmes (code RCP106) Objectif : Présenter
Planche n o 22. Fonctions de plusieurs variables. Corrigé
 Planche n o Fonctions de plusieurs variables Corrigé n o : f est définie sur R \ {, } Pour, f, = Quand tend vers, le couple, tend vers le couple, et f, tend vers Donc, si f a une limite réelle en, cette
Planche n o Fonctions de plusieurs variables Corrigé n o : f est définie sur R \ {, } Pour, f, = Quand tend vers, le couple, tend vers le couple, et f, tend vers Donc, si f a une limite réelle en, cette
Examen optimisation Centrale Marseille (2008) et SupGalilee (2008)
 et SupGalilee (2008)") Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Contexte. Pour cela, elles doivent être très compliquées, c est-à-dire elles doivent être très différentes des fonctions simples,
 Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé.
 Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Partie 1 - Séquence 3 Original d une fonction
 Partie - Séquence 3 Original d une fonction Lycée Victor Hugo - Besançon - STS 2 I. Généralités I. Généralités Définition Si F(p) = L [f(t)u (t)](p), alors on dit que f est l original de F. On note f(t)
Partie - Séquence 3 Original d une fonction Lycée Victor Hugo - Besançon - STS 2 I. Généralités I. Généralités Définition Si F(p) = L [f(t)u (t)](p), alors on dit que f est l original de F. On note f(t)
Table des matières. I Mise à niveau 11. Préface
 Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Introduction au Data-Mining
 Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Première partie. Préliminaires : noyaux itérés. MPSI B 6 juin 2015
 Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Énoncé Soit V un espace vectoriel réel. L espace vectoriel des endomorphismes de V est désigné par L(V ). Lorsque f L(V ) et k N, on désigne par f 0 = Id V, f k = f k f la composée de f avec lui même k
Commande de systèmes non retardés par retour de sortie statique échantillonné
 Commande de systèmes non retardés par retour de sortie statique échantillonné Alexandre Seuret, Karl H. Johansson, Michel Dambrine 2 ACCESS Linnaeus Centre Royal Institute of Technology, Stockholm, Suède
Commande de systèmes non retardés par retour de sortie statique échantillonné Alexandre Seuret, Karl H. Johansson, Michel Dambrine 2 ACCESS Linnaeus Centre Royal Institute of Technology, Stockholm, Suède
Master de Recherche première année. Programme de cours 2008-2011
 Master de Recherche première année Mention : Mathématiques et Applications Spécialité : Mathématiques fondamentales et appliquées Responsable : Xue Ping WANG Programme de cours 2008-2011 Module M1 : Analyse
Master de Recherche première année Mention : Mathématiques et Applications Spécialité : Mathématiques fondamentales et appliquées Responsable : Xue Ping WANG Programme de cours 2008-2011 Module M1 : Analyse
Image d un intervalle par une fonction continue
 DOCUMENT 27 Image d un intervalle par une fonction continue La continuité d une fonction en un point est une propriété locale : une fonction est continue en un point x 0 si et seulement si sa restriction
DOCUMENT 27 Image d un intervalle par une fonction continue La continuité d une fonction en un point est une propriété locale : une fonction est continue en un point x 0 si et seulement si sa restriction
Baccalauréat ES/L Amérique du Sud 21 novembre 2013
 Baccalauréat ES/L Amérique du Sud 21 novembre 2013 A. P. M. E. P. EXERCICE 1 Commun à tous les candidats 5 points Une entreprise informatique produit et vend des clés USB. La vente de ces clés est réalisée
Baccalauréat ES/L Amérique du Sud 21 novembre 2013 A. P. M. E. P. EXERCICE 1 Commun à tous les candidats 5 points Une entreprise informatique produit et vend des clés USB. La vente de ces clés est réalisée
Quantification Scalaire et Prédictive
 Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
RO04/TI07 - Optimisation non-linéaire
 RO04/TI07 - Optimisation non-linéaire Stéphane Mottelet Université de Technologie de Compiègne Printemps 2003 I Motivations et notions fondamentales 4 I1 Motivations 5 I2 Formes quadratiques 13 I3 Rappels
RO04/TI07 - Optimisation non-linéaire Stéphane Mottelet Université de Technologie de Compiègne Printemps 2003 I Motivations et notions fondamentales 4 I1 Motivations 5 I2 Formes quadratiques 13 I3 Rappels
Intelligence Artificielle Planification
 Intelligence Artificielle Planification Bruno Bouzy http://web.mi.parisdescartes.fr/~bouzy bruno.bouzy@parisdescartes.fr Licence 3 Informatique UFR Mathématiques et Informatique Université Paris Descartes
Intelligence Artificielle Planification Bruno Bouzy http://web.mi.parisdescartes.fr/~bouzy bruno.bouzy@parisdescartes.fr Licence 3 Informatique UFR Mathématiques et Informatique Université Paris Descartes
* très facile ** facile *** difficulté moyenne **** difficile ***** très difficile I : Incontournable
 Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Eo7 Fonctions de plusieurs variables Eercices de Jean-Louis Rouget Retrouver aussi cette fiche sur wwwmaths-francefr * très facile ** facile *** difficulté moenne **** difficile ***** très difficile I
Analyse fonctionnelle Théorie des représentations du groupe quantique compact libre O(n) Teodor Banica Résumé - On trouve, pour chaque n 2, la classe
 Teodor Banica Résumé - On trouve, pour chaque n 2, la classe") Analyse fonctionnelle Théorie des représentations du groupe quantique compact libre O(n) Teodor Banica Résumé - On trouve, pour chaque n 2, la classe des n n groupes quantiques compacts qui ont la théorie
Analyse fonctionnelle Théorie des représentations du groupe quantique compact libre O(n) Teodor Banica Résumé - On trouve, pour chaque n 2, la classe des n n groupes quantiques compacts qui ont la théorie
Ce cours introduit l'électrodynamique classique. Les chapitres principaux sont :
 11P001 ELECTRDYNAMIQUE I Automne 4 crédits BACHELR 1ère ANNEE MASTER BIDISCIPLINAIRE MINEURE PHYSIQUE CURS BLIGATIRES Enseignant(s) G. Iacobucci P Automne (A) Horaire A C2 E2 LU 1113 EPA JE 810 EPA = obligatoire
11P001 ELECTRDYNAMIQUE I Automne 4 crédits BACHELR 1ère ANNEE MASTER BIDISCIPLINAIRE MINEURE PHYSIQUE CURS BLIGATIRES Enseignant(s) G. Iacobucci P Automne (A) Horaire A C2 E2 LU 1113 EPA JE 810 EPA = obligatoire
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
C1 : Fonctions de plusieurs variables
 1er semestre 2012/13 CPUMP 3 U 11 : Abrégé de cours Compléments Analyse 3 : fonctions analytiques Les notes suivantes, disponibles à l adresse http://www.iecn.u-nancy.fr/~bertram/, contiennent les définitions
1er semestre 2012/13 CPUMP 3 U 11 : Abrégé de cours Compléments Analyse 3 : fonctions analytiques Les notes suivantes, disponibles à l adresse http://www.iecn.u-nancy.fr/~bertram/, contiennent les définitions
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Le théorème de Thalès et sa réciproque
 Le théorème de Thalès et sa réciproque I) Agrandissement et Réduction d une figure 1) Définition : Lorsque toutes les longueurs d une figure F sont multipliées par un même nombre k on obtient une autre
Le théorème de Thalès et sa réciproque I) Agrandissement et Réduction d une figure 1) Définition : Lorsque toutes les longueurs d une figure F sont multipliées par un même nombre k on obtient une autre
Travail en collaboration avec F.Roueff M.S.Taqqu C.Tudor
 Paramètre de longue mémoire d une série temporelle : le cas non linéaire Travail en collaboration avec F.Roueff M.S.Taqqu C.Tudor Notion de longue mémoire Les valeurs d une série temporelle X = (X l )
Paramètre de longue mémoire d une série temporelle : le cas non linéaire Travail en collaboration avec F.Roueff M.S.Taqqu C.Tudor Notion de longue mémoire Les valeurs d une série temporelle X = (X l )
Comparaison de fonctions Développements limités. Chapitre 10
 PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
Représentation géométrique d un nombre complexe
 CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
CHAPITRE 1 NOMBRES COMPLEXES 1 Représentation géométrique d un nombre complexe 1. Ensemble des nombres complexes Soit i le nombre tel que i = 1 L ensemble des nombres complexes est l ensemble des nombres
Fonctions homographiques
 Seconde-Fonctions homographiques-cours Mai 0 Fonctions homographiques Introduction Voir le TP Géogébra. La fonction inverse. Définition Considérons la fonction f définie par f() =. Alors :. f est définie
Seconde-Fonctions homographiques-cours Mai 0 Fonctions homographiques Introduction Voir le TP Géogébra. La fonction inverse. Définition Considérons la fonction f définie par f() =. Alors :. f est définie
1 Définition de la non stationnarité
 Chapitre 2: La non stationnarité -Testsdedétection Quelques notes de cours (non exhaustives) 1 Définition de la non stationnarité La plupart des séries économiques sont non stationnaires, c est-à-direqueleprocessusquiles
Chapitre 2: La non stationnarité -Testsdedétection Quelques notes de cours (non exhaustives) 1 Définition de la non stationnarité La plupart des séries économiques sont non stationnaires, c est-à-direqueleprocessusquiles
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
DOCM 2013 http://docm.math.ca/ Solutions officielles. 1 2 10 + 1 2 9 + 1 2 8 = n 2 10.
 A1 Trouvez l entier positif n qui satisfait l équation suivante: Solution 1 2 10 + 1 2 9 + 1 2 8 = n 2 10. En additionnant les termes du côté gauche de l équation en les mettant sur le même dénominateur
A1 Trouvez l entier positif n qui satisfait l équation suivante: Solution 1 2 10 + 1 2 9 + 1 2 8 = n 2 10. En additionnant les termes du côté gauche de l équation en les mettant sur le même dénominateur
Continuité en un point
 DOCUMENT 4 Continuité en un point En général, D f désigne l ensemble de définition de la fonction f et on supposera toujours que cet ensemble est inclus dans R. Toutes les fonctions considérées sont à
DOCUMENT 4 Continuité en un point En général, D f désigne l ensemble de définition de la fonction f et on supposera toujours que cet ensemble est inclus dans R. Toutes les fonctions considérées sont à
INTRODUCTION À L ANALYSE FACTORIELLE DES CORRESPONDANCES
 INTRODUCTION À L ANALYSE FACTORIELLE DES CORRESPONDANCES Dominique LAFFLY Maître de Conférences, Université de Pau Laboratoire Société Environnement Territoire UMR 5603 du CNRS et Université de Pau Domaine
INTRODUCTION À L ANALYSE FACTORIELLE DES CORRESPONDANCES Dominique LAFFLY Maître de Conférences, Université de Pau Laboratoire Société Environnement Territoire UMR 5603 du CNRS et Université de Pau Domaine
Du Premier au Second Degré
 Du Premier au Second Degré Première Bac Pro 3 ans November 26, 2011 Première Bac Pro 3 ans Du Premier au Second Degré Sommaire 1 Fonction Polynôme du second degré 2 Fonction Polynôme du Second Degré: Synthèse
Du Premier au Second Degré Première Bac Pro 3 ans November 26, 2011 Première Bac Pro 3 ans Du Premier au Second Degré Sommaire 1 Fonction Polynôme du second degré 2 Fonction Polynôme du Second Degré: Synthèse
Un K-espace vectoriel est un ensemble non vide E muni : d une loi de composition interne, c est-à-dire d une application de E E dans E : E E E
 Exo7 Espaces vectoriels Vidéo partie 1. Espace vectoriel (début Vidéo partie 2. Espace vectoriel (fin Vidéo partie 3. Sous-espace vectoriel (début Vidéo partie 4. Sous-espace vectoriel (milieu Vidéo partie
Exo7 Espaces vectoriels Vidéo partie 1. Espace vectoriel (début Vidéo partie 2. Espace vectoriel (fin Vidéo partie 3. Sous-espace vectoriel (début Vidéo partie 4. Sous-espace vectoriel (milieu Vidéo partie
ALGORITHMIQUE II NOTION DE COMPLEXITE. SMI AlgoII
 ALGORITHMIQUE II NOTION DE COMPLEXITE 1 2 Comment choisir entre différents algorithmes pour résoudre un même problème? Plusieurs critères de choix : Exactitude Simplicité Efficacité (but de ce chapitre)
ALGORITHMIQUE II NOTION DE COMPLEXITE 1 2 Comment choisir entre différents algorithmes pour résoudre un même problème? Plusieurs critères de choix : Exactitude Simplicité Efficacité (but de ce chapitre)
Calcul différentiel sur R n Première partie
 Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Calcul différentiel sur R n Première partie Université De Metz 2006-2007 1 Définitions générales On note L(R n, R m ) l espace vectoriel des applications linéaires de R n dans R m. Définition 1.1 (différentiabilité
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
CCP PSI - 2010 Mathématiques 1 : un corrigé
 CCP PSI - 00 Mathématiques : un corrigé Première partie. Définition d une structure euclidienne sur R n [X]... B est clairement symétrique et linéaire par rapport à sa seconde variable. De plus B(P, P
CCP PSI - 00 Mathématiques : un corrigé Première partie. Définition d une structure euclidienne sur R n [X]... B est clairement symétrique et linéaire par rapport à sa seconde variable. De plus B(P, P
Panorama de la cryptographie des courbes elliptiques
 Panorama de la cryptographie des courbes elliptiques Damien Robert 09/02/2012 (Conseil régional de Lorraine) La cryptographie, qu est-ce que c est? Définition La cryptographie est la science des messages
Panorama de la cryptographie des courbes elliptiques Damien Robert 09/02/2012 (Conseil régional de Lorraine) La cryptographie, qu est-ce que c est? Définition La cryptographie est la science des messages