CAHIER DES CHARGES 2. Support automatisé de bagages à main pour personnes à mobilité réduite. Par : Boniface Lalié et Alex Couture
|
|
|
- Rose Perrot
- il y a 8 ans
- Total affichages :
Transcription
1 CAHIER DES CHARGES 2 Support automatisé de bagages à main pour personnes à mobilité réduite Par : Boniface Lalié et Alex Couture CÉGEP DE SHERBROOKE Date : 20/12/2013

2 Table des matières 1. But: Description fonctionnelle: Devis technique:... 4 a. Entrées / Sorties:... 4 Électriques:... 4 Logiciel:... 5 b. Caractéristiques désirées:... 5 Logiciels:... 5 Matériels:... 5 c. Contraintes particulières:... 7 Logiciels:... 7 Mécaniques: Liste des pièces pour lesquelles on doit faire des tests Échéancier: Évaluation des coûts:

3 1. But: Concevoir un robot support capable de suivre une personne ayant un handicap physique sur un terrain plat et pouvant transporter son bagage à main (Exemple: un aéroport international). 2. Description fonctionnelle: Le support de bagages à main est contrôlé par une manette de type «Nunchuck» sans fil accompagnée d un module récepteur, qui fonctionne en communication Bluetooth. Le support lui-même possède des capteurs ultrasons et infrarouges ainsi que deux moteurs qui vont permettre le déplacement de notre robot support tout en faisant attention à l environnement qui l entoure. Un microcontrôleur est intégré et va gérer le traitement des données envoyées par les différentes pièces ou par notre manette «Nunchuck» qui sera à la main de notre utilisateur. Figure 1. Schéma de principes de notre support Notre support automatisé de bagages à main a la possibilité d avoir un mode de fonctionnement manuel et automatique: 3

4 En mode automatique: L utilisateur peut, sur ligne droite seulement, dire au robot d avancer à une certaine vitesse et ne plus toucher la manette. Le robot s adapte à la vitesse et est capable d éviter les obstacles (un objet, un trou, etc.) sur une certaine distance. En mode manuel: L utilisateur prend le contrôle du robot dans des manœuvres difficiles, comme faire des virages sur lui-même ou à 90 degrés et esquiver des objets trop proches les uns des autres, etc. 3. Devis technique: a. Entrées / Sorties: Électriques: - Arduino Mega 2560 : (sera probablement remplacé par un PIC32) L Arduino mega 2560 embarque un microcontrôleur ATMEGA2560 cadencé à 16MHz. Alimentation entre 7 et 12V recommandée. Il comporte : 34 entrées/sorties digitales 12 entrées/sorties PWM 3 ports de communication série 1 port de communication type I2C 15 ports analogiques Il comporte suffisamment de ports pour de futures améliorations. - Drive L298N (pour moteur DC) La drive comporte une entrée ENABLE analogique PWM pour le contrôle sur l activation du moteur et requiert deux ports numériques pour contrôler la direction sur les broches INA1 et INA2. Le contrôle des ports ENABLE, INA1, INA2 s effectue à une tension 0 à 5V. Une entrée 12V sur la carte est présente pour l alimentation du moteur. - Drive L298N (pour moteur pas-à-pas) La drive comporte une entrée ENABLE analogique PWM pour le contrôle sur l activation du moteur pas-à-pas et requiert quatre ports numériques (INA1-4) pour le contrôle des bobines du moteur pas-à-pas. Le contrôle des ports ENABLE, INA1-4 s effectue à une tension 0 à 5V. Une entrée 12V sur la carte est présente pour l alimentation du moteur. - Capteur Ultrason HC-SR04 4
 L Arduino mega 2560 embarque un microcontrôleur ATMEGA2560 cadencé à 16MHz.")
5 Le capteur d ultrason requiert deux entrées numériques TRIGGER et ECHO pour bien faire fonctionner le capteur. La broche TRIGGER se charge de démarrer la lecture avec un niveau haut sur une période de 10us et la broche ECHO est à un niveau haut pendant un certain temps dépendamment de la distance de l objet. - Capteur infrarouge Le capteur d infrarouge requiert une entrée analogique pour la réception d une tension variable en fonction d un objet détecté et de sa distance. - Capteur de vitesse (TIL139) Le capteur de vitesse requiert une entrée digitale sur le microcontrôleur qui reçoit les impulsions du capteur pour traiter la vitesse. - Limiteur de fin de course pour le stepper Le limiteur de fin de course requiert deux entrées digitales afin de détecter si la roue est en position maximum à droite ou à gauche. - Batterie La batterie ne requiert pas de port au microcontrôleur. - Ventilation La ventilation ne requiert pas de port au microcontrôleur. - Avertisseur sonore (Haut-parleur) L avertisseur comprend seulement deux bornes de connections «+» et «-». Logiciel: La programmation s effectue avec l application Arduino conçue pour la programmation des Arduino Mega 2560 et Nano. b. Caractéristiques désirées: Logiciels: - Il n y aura pas d interface visuelle pour notre utilisateur, le contrôle se fera Exclusivement via notre manette qu il aura en main. Matériels: - Arduino Mega 2560 : (sera probablement remplacé par un PIC32) 5
 Le capteur de vitesse requiert une entrée digitale sur le microcontrôleur qui reçoit les impulsions du capteur pour traiter la vitesse.")
6 L Arduino mega est le cœur même du robot. Avec c est divers entrées et sorties, il sera en mesure de contrôler les différents capteurs ainsi que la partie motorisation. La programmation se fera en langage c. - Drive L298N (pour moteur DC) La drive permet au moteur 12V d être alimenté convenablement tout en permettant de contrôler la direction (avance / recule) du moteur avec une tension de 5V TTL. Un signal PWM entrant sur celle-ci permet le contrôle efficace de la vitesse du moteur. - Drive L298N (pour moteur pas à pas => direction droite / gauche) La drive pour le moteur pas à pas quant à elle, est utile pour contrôler les différentes bobines du moteur pas à pas pour le sens de rotation. Elle sert aussi à contrôler la vitesse de rotation par un signal PWM envoyé à la drive. - Capteur Ultrason HC-SR04 Les capteurs d ultrasons serviront pour la détection d objets et permettront de guider le robot dans un environnement pouvant contenir des obstacles. - Capteur infrarouge Les capteurs infrarouges serviront de repère de terrain afin de voir les obstacles (trou, creux, escalier, pied) qui pourraient être devant ou derrière le robot. - Capteur vitesse TIL139 Le capteur de vitesse permettra de déterminer exactement la vitesse de déplacement afin que le robot puisse se synchroniser avec la personne qui marche devant elle à une certaine distance. Si cette distance vient à changer, le robot pourra réagir en réduisant ou augmentant sa vitesse. - Limiteur de fin de course pour le stepper Les limiteurs de fin de course permettent au moteur pas-à-pas de ne pas forcer lorsqu il atteint le maximum de sa rotation afin d'éviter les bris mécaniques. -Batterie PS-1270 Une batterie 12V servira d alimentation pour l ensemble du robot. Un circuit de conversion de tension sera requis pour l alimentation de la partie circuit 5V. La batterie contient assez de charges pour fonctionner pendant au moins une journée. - Ventilation Un ventilateur sera probablement requis afin de refroidir des composantes critiques comme les drives. L utilité est à déterminer. - Manette de type «Nunchuck» sans fil La manette permettra à l utilisateur du robot d activer le contrôle manuel pour diriger le robot efficacement dans les endroits plus critiques pour les déplacements. 6

7 - Avertisseur sonore (Haut-parleur) L avertisseur permettra de prévenir l utilisateur si un problème est rencontré, par exemple : blocage du robot, obstacles trop importants, distance élevée, etc. Logiciels: c. Contraintes particulières: - Il n y a pas d interface visuelle pour notre utilisateur, des DELs permettront d indiquer L état de fonctionnement de notre support automatisé (connexion établie, mode manuel / Automatique). - Le déplacement du robot se limite à la vision des capteurs : il est possible que la Lumière, le type de surface et la couleur influencent les capteurs infrarouges ; les Capteurs ultrasons sont sensibles à la température et à la pression. Également Sensibles aux autres robots utilisant la même fréquence. Mécaniques: - La base de notre robot est fournie, nous devons donc nous adapter à son aspect Physique et placer nos composants en fonction de celui-ci. 7
.")
8 4. Liste des pièces pour lesquelles on doit faire des tests Manette de type «Nunchuck» : Nous devons effectuer des tests sur la communication de notre manette, voir comment on reçoit les données, comment les convertir et comment les utiliser par rapport à nos objectifs concernant notre projet. On sait que notre manette utilise une communication «Bluetooth» et que la distance maximale de connection peut aller jusqu à 100 m, ce qui est largement plus que ce dont on a besoin. Notre support automatisé devra être assez proche de son utilisateur voire une distance maximum de 10m entre les deux. Avertisseur sonore (haut-parleur pour circuit imprimé) : Nous allons effectuer des tests de notre avertisseur afin de mieux connaître son fonctionnement car nous voulons qu il fonctionne comme tels : «bip» si la distance entre le robot et l utilisateur dépasse les 10 m. «bip» si le robot reste bloqué et que les moteurs forces inutilement. «bip» si le robot reste détecte un trou en de lui. 8

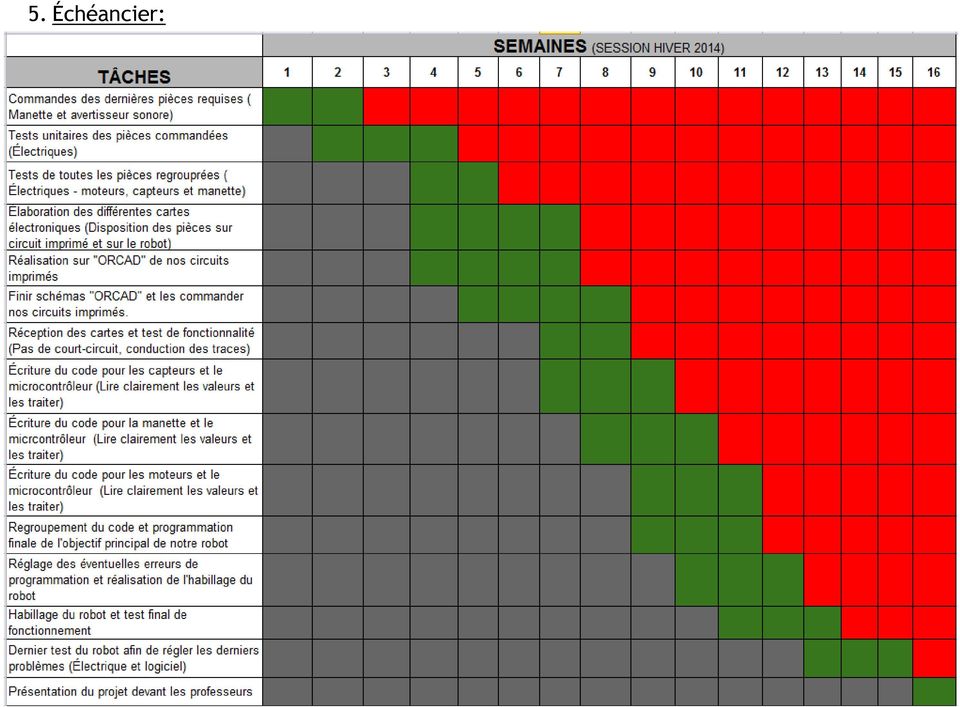
9 5. Échéancier: 9
10 6. Évaluation des coûts: Cela comprend: (Fournisseur: roboshop.ca) Arduino Mega 2560 = 1 x 61.04$ (sera probablement remplacé par un PIC32) Manette de type «Nunchuck» sans fil = 1 x 12,00 $ Capteur Laser = 1 x 0,00 $ Avertisseur sonore = 1 x 3,00 $ Moteur DC = 1 x 0,00 $ Moteur pas à pas = 1 x 0,00 $ L298N = 2 x 10.50$ Capteur Infrarouge = 5 x 15,68$ HC-SR04 = 3 x 3,80 $ TIL139 = 1 x 0,00 $ Limiteur fin course = 1 x 0,00 $ PS-1270 = 1 x 18,25$ (Amazon.com) Ventilation = 1 x. $ (à déterminer si nécessaire) Le coût total de notre projet sera de 205,09 $ CAD. 10

Projet Robot Centaure
 Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Etude de FP3 commande moteur et électroaimant. Déplacement carte et connexion
 Etude de FP3 commande moteur et électroaimant Déplacement carte et connexion Décomposition fonctionnelle. - Définir le rôle et caractériser les entrées-sorties de FP3 permettant la commande du moteur et
Etude de FP3 commande moteur et électroaimant Déplacement carte et connexion Décomposition fonctionnelle. - Définir le rôle et caractériser les entrées-sorties de FP3 permettant la commande du moteur et
Prototypage électronique
 Prototypage électronique C'est quoi Arduino? Enseignant d'électronique en BTS des Systèmes Électroniques au lycée Cabanis de Brive-la-Gaillarde, j'ai commencé en 2010 à entendre parler d'arduino à gauche
Prototypage électronique C'est quoi Arduino? Enseignant d'électronique en BTS des Systèmes Électroniques au lycée Cabanis de Brive-la-Gaillarde, j'ai commencé en 2010 à entendre parler d'arduino à gauche
Les monte escaliers de MediTek La solution pour votre mobilité à votre domicile
 Les monte escaliers de MediTek La solution pour votre mobilité à votre domicile VOTRE INDEPENDANCE REGAGNEE PAR L EXCELLENCE DU NOUVEAU MONTE ESCALIER DE MEDITEK. Autrefois, quand monter un escalier était
Les monte escaliers de MediTek La solution pour votre mobilité à votre domicile VOTRE INDEPENDANCE REGAGNEE PAR L EXCELLENCE DU NOUVEAU MONTE ESCALIER DE MEDITEK. Autrefois, quand monter un escalier était
La sécurité des biens et des personnes Comment se protéger des intrusions?
 Etablir un croquis du circuit d alimentation énergétique et un croquis du circuit ACOT-02 1/4 Problématique : Nous connaissons ce qu est un système d alarme, sa fonction et les différents éléments qui
Etablir un croquis du circuit d alimentation énergétique et un croquis du circuit ACOT-02 1/4 Problématique : Nous connaissons ce qu est un système d alarme, sa fonction et les différents éléments qui
Centrale d Alarme 32 zones sans fils
 Centrale d Alarme 32 zones sans fils Ultra facile à installer et à programmer Sans fil : Aucune connexion nécessaire!!! Nombreux capteurs différents disponibles : permet de détecter une intrusion par infrarouge,
Centrale d Alarme 32 zones sans fils Ultra facile à installer et à programmer Sans fil : Aucune connexion nécessaire!!! Nombreux capteurs différents disponibles : permet de détecter une intrusion par infrarouge,
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Présentation du Système Informatique Mobile PARADIDACT
 Présentation du Système Informatique Mobile PARADIDACT www.parat.fr pourquoi un Systeme Informatique Mobile PARADIDACT? PARADIDACT : un véritable système modulaire et évolutif. Les ordinateurs portables
Présentation du Système Informatique Mobile PARADIDACT www.parat.fr pourquoi un Systeme Informatique Mobile PARADIDACT? PARADIDACT : un véritable système modulaire et évolutif. Les ordinateurs portables
COURS GRATUITS. A- Approche de quelques fonctions du tableau de bord et leur signification respective
 COURS GRATUITS CHAPITRE 4 : LE TABLEAU DE BORD INTRODUCTION Un système asservi est constitué des trois entités : - Les éléments de commande et de consigne - Les éléments de traitement d exécution (partie
COURS GRATUITS CHAPITRE 4 : LE TABLEAU DE BORD INTRODUCTION Un système asservi est constitué des trois entités : - Les éléments de commande et de consigne - Les éléments de traitement d exécution (partie
Prise en main. Prise en main - 0
 Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
ENREGISTREUR DE TEMPERATURE
 ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
Conférence sur les microcontroleurs.
 Conférence sur les microcontroleurs. Le microcontrôleur Les besoins et le développement. Vers 1970, pour des calculs (calculatrice). Le premier est le 4004 de Intel, 90K. La technologie. Les 2 principales
Conférence sur les microcontroleurs. Le microcontrôleur Les besoins et le développement. Vers 1970, pour des calculs (calculatrice). Le premier est le 4004 de Intel, 90K. La technologie. Les 2 principales
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Manuel d'utilisation Version abrégée
 Manuel d'utilisation Version abrégée Version d'équipement 2.30 Version française 2.0 www.pitlab.com Varsovie, 2014 Cher modéliste Nous vous remercions d avoir choisi le SkyAssistant, dernier système de
Manuel d'utilisation Version abrégée Version d'équipement 2.30 Version française 2.0 www.pitlab.com Varsovie, 2014 Cher modéliste Nous vous remercions d avoir choisi le SkyAssistant, dernier système de
LE RÉFRIGÉRATEUR PRÊT À INSTALLER
 LE RÉFRIGÉRATEUR PRÊT À INSTALLER sans aucune modification de la structure de votre paillasse! UNIMEDICAL LAB, est la solution professionnelle proposée par Unifrigor pour le laboratoire. Tables réfrigérées
LE RÉFRIGÉRATEUR PRÊT À INSTALLER sans aucune modification de la structure de votre paillasse! UNIMEDICAL LAB, est la solution professionnelle proposée par Unifrigor pour le laboratoire. Tables réfrigérées
Baccalauréat Professionnel. Microtechniques. Session 2012 DOSSIER TECHNIQUE (DT)
") Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
MISSION DE L ENTREPRISE. Fabriquer grâce à son savoir faire, des produits en acier, aluminium et polymères pour les vendre sur le marché mondial
 Bureau/presentation corpo/presentation goldcorp/powerpoint minautor AOUT 2013 MISSION DE L ENTREPRISE Fabriquer grâce à son savoir faire, des produits en acier, aluminium et polymères pour les vendre sur
Bureau/presentation corpo/presentation goldcorp/powerpoint minautor AOUT 2013 MISSION DE L ENTREPRISE Fabriquer grâce à son savoir faire, des produits en acier, aluminium et polymères pour les vendre sur
L'alarme Bac Pro SEN Page 1 / 9
 1 Analyse du système technique: LE SYSTEME DE GESTIONS DES INTRUSIONS 1.1 Expression du besoin: L'augmentation du nombre de cambriolages dans les habitations et les entreprises est un aspect particulièrement
1 Analyse du système technique: LE SYSTEME DE GESTIONS DES INTRUSIONS 1.1 Expression du besoin: L'augmentation du nombre de cambriolages dans les habitations et les entreprises est un aspect particulièrement
Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988)
") Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988) Le système d alerte centralisée de la 928 est destiné a présenter au conducteur toute anomalie de fonctionnement
Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988) Le système d alerte centralisée de la 928 est destiné a présenter au conducteur toute anomalie de fonctionnement
fullprotect inside EOLE SPEie RS E-SPEie 0.5-12-5V-0.6A-RS 1.0 revision Protection environnement Datasheet édition française
 Protection environnement Datasheet édition française 1.0 revision R-D-CO-D-27112011-1.0-C fullprotect inside SPEi Protection environnement interne SPEe Protection environnement externe SPEc Contrôle de
Protection environnement Datasheet édition française 1.0 revision R-D-CO-D-27112011-1.0-C fullprotect inside SPEi Protection environnement interne SPEe Protection environnement externe SPEc Contrôle de
Centrale d alarme DA996
 Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Robot de Téléprésence
 Robot de Téléprésence Projet innovant BISCH Simon / FOURURE Florian / VICENTE VALVERDE César 12 Sommaire Introduction... 3 Description du projet... 4 Logiciel de vidéoconférence : Linphone... 5 La connexion...
Robot de Téléprésence Projet innovant BISCH Simon / FOURURE Florian / VICENTE VALVERDE César 12 Sommaire Introduction... 3 Description du projet... 4 Logiciel de vidéoconférence : Linphone... 5 La connexion...
Mini_guide_Isis.pdf le 23/09/2001 Page 1/14
 1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
Manuel programmation QUESTOR
 QUESTOR Programmation et activation AS 271 et AS 270 Document: KSW3s527.0003 / fr 2010.08 Edition: Août 2010 QUESTOR TABLE DES MATIÉRES 1 Description du produit FR-4 1.1 Application.... FR-4 1.1.1 Logiciel
QUESTOR Programmation et activation AS 271 et AS 270 Document: KSW3s527.0003 / fr 2010.08 Edition: Août 2010 QUESTOR TABLE DES MATIÉRES 1 Description du produit FR-4 1.1 Application.... FR-4 1.1.1 Logiciel
SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION. Contenu du dossier :
 DOSSIER DE PRESENTATION. Contenu du dossier :") SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION Contenu du dossier : 1. PRESENTATION DU SYSTEME DE PALPAGE A TRANSMISSION RADIO....1 1.1. DESCRIPTION DU FABRICANT....1
SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION Contenu du dossier : 1. PRESENTATION DU SYSTEME DE PALPAGE A TRANSMISSION RADIO....1 1.1. DESCRIPTION DU FABRICANT....1
DESCRIPTIF DES PROJETS 3EME ANNEE QUI SERONT PRESENTES LORS DE LA JOURNEE DE PROJET DE FIN D ETUDE LE 26/01/2012
 DA Télémédecine et SI de Santé DESCRIPTIF DES PROJETS 3EME ANNEE QUI SERONT PRESENTES LORS DE LA JOURNEE DE PROJET DE FIN D ETUDE LE 26/01/2012 PROJET N 1 : IMPLEMENTATION D'UNE INTERFACE SWEETHOME DEDIEE
DA Télémédecine et SI de Santé DESCRIPTIF DES PROJETS 3EME ANNEE QUI SERONT PRESENTES LORS DE LA JOURNEE DE PROJET DE FIN D ETUDE LE 26/01/2012 PROJET N 1 : IMPLEMENTATION D'UNE INTERFACE SWEETHOME DEDIEE
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
Etudier l influence de différents paramètres sur un phénomène physique Communiquer et argumenter en utilisant un vocabulaire scientifique adapté
 Compétences travaillées : Mettre en œuvre un protocole expérimental Etudier l influence de différents paramètres sur un phénomène physique Communiquer et argumenter en utilisant un vocabulaire scientifique
Compétences travaillées : Mettre en œuvre un protocole expérimental Etudier l influence de différents paramètres sur un phénomène physique Communiquer et argumenter en utilisant un vocabulaire scientifique
! analyse du fonctionnement
 Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
12 applications pour maîtriser le PICBASIC PB-3B - Gérard GUIHÉNEUF. Elektor-Publitronic ISBN : 978 2 86661 166 8
 Sommaire Avant-propos 1. Présentation du module PICBASIC PB-3B 1.1 La gamme PICBASIC fabriquée par Comfile Technology..................... 3 1.2 Principe commun de programmation......................................
Sommaire Avant-propos 1. Présentation du module PICBASIC PB-3B 1.1 La gamme PICBASIC fabriquée par Comfile Technology..................... 3 1.2 Principe commun de programmation......................................
Mini_guide_Isis_v6.doc le 10/02/2005 Page 1/15
 1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
emachines de la gamme G720/G520 Guide rapide
 emachines de la gamme G720/G520 Guide rapide Droits d auteur 2008. Acer Incorporated. Tous droits réservés. Guide rapide du emachines de la gamme G720/G520 Première publication : 08/2008 Cette société
emachines de la gamme G720/G520 Guide rapide Droits d auteur 2008. Acer Incorporated. Tous droits réservés. Guide rapide du emachines de la gamme G720/G520 Première publication : 08/2008 Cette société
Plate-formes inclinées SUPRA & SUPRA LINEA
 Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
ANALYSE TRAMEs LIAISON SERIE
 ANALYSE TRAMEs LIAISON SERIE 1 Objectifs de ce travail Nous allons étudier dynamiquement la liaison série en utilisant la simulation. La mise en œuvre des liaisons séries simulées et de TestCom est expliquée
ANALYSE TRAMEs LIAISON SERIE 1 Objectifs de ce travail Nous allons étudier dynamiquement la liaison série en utilisant la simulation. La mise en œuvre des liaisons séries simulées et de TestCom est expliquée
NOTICE D UTILISATION
 GSM / SMS Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-sans-fil-gsm-f3/ pour accéder à la notice vidéo du kit d alarme NFO-480030-1307 NOTICE D UTILISATION
GSM / SMS Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-sans-fil-gsm-f3/ pour accéder à la notice vidéo du kit d alarme NFO-480030-1307 NOTICE D UTILISATION
MEMOIRES MAGNETIQUES A DISQUES RIGIDES
 MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
MEMOIRES MAGNETIQUES A DISQUES RIGIDES PARTIE ELECTRONIQUE Le schéma complet de FP5 est donnée en annexe. Les questions porterons sur la fonction FP5 dont le schéma fonctionnel de degré 2 est présenté
 Prototypage facile Audio streaming Flyport et l internet des Objets opensource Robots android Compatible Lego Mindstrom Domotique I. Flyport et le monde de l IP II. Caractéristiques du module III. Flyport
Prototypage facile Audio streaming Flyport et l internet des Objets opensource Robots android Compatible Lego Mindstrom Domotique I. Flyport et le monde de l IP II. Caractéristiques du module III. Flyport
Caractéristiques techniques INVERTER 9 SF INVERTER 9 HP INVERTER 12 SF INVERTER 12 HP
 - CARACTERISTIQUES TECHNIQUES - UNICO INVERTER - Caractéristiques techniques INVERTER 9 SF INVERTER 9 HP INVERTER 12 SF INVERTER 12 HP Capacité de refroidissement (1) (min/moyen/max) kw 1.4/2.3/2.7 1.4/2.3/2.7
- CARACTERISTIQUES TECHNIQUES - UNICO INVERTER - Caractéristiques techniques INVERTER 9 SF INVERTER 9 HP INVERTER 12 SF INVERTER 12 HP Capacité de refroidissement (1) (min/moyen/max) kw 1.4/2.3/2.7 1.4/2.3/2.7
AUTOPORTE III Notice de pose
 AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
Janvier 2013 AUDIO/VIDEO PLAYER AUDIO VIDEO OEM DIVERS
 Janvier 2013 AUDIO/VIDEO PLAYER AUDIO VIDEO OEM DIVERS Flash mpx HD DIFFUSION DE VIDEO Le Flash mpx HD diffuse des fichiers audio et video stockés sur une clé USB ou un disque dur interne. Ce lecteur lit
Janvier 2013 AUDIO/VIDEO PLAYER AUDIO VIDEO OEM DIVERS Flash mpx HD DIFFUSION DE VIDEO Le Flash mpx HD diffuse des fichiers audio et video stockés sur une clé USB ou un disque dur interne. Ce lecteur lit
Procédure appropriée pour éditer les diagrammes avec ECM Titanium
 Procédure appropriée pour éditer les diagrammes avec ECM Titanium Introduction: Dans ce document vous trouverez toutes les renseignements dont vous avez besoin pour éditer les diagrammes avec le logiciel
Procédure appropriée pour éditer les diagrammes avec ECM Titanium Introduction: Dans ce document vous trouverez toutes les renseignements dont vous avez besoin pour éditer les diagrammes avec le logiciel
Vidia La solution de visioconférence de Swisscom & astuces
 La solution de visioconférence de Swisscom Trucs & astuces Sommaire 1 Réussir ses conférences vidéo avec Vidia 3 2 Obtenir une qualité de son et d image optimale 3 2.1 Qualité de l image 3 2.1.1 Caméra
La solution de visioconférence de Swisscom Trucs & astuces Sommaire 1 Réussir ses conférences vidéo avec Vidia 3 2 Obtenir une qualité de son et d image optimale 3 2.1 Qualité de l image 3 2.1.1 Caméra
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
T500 DUAlTACH. JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence TACHYMETRE 2 CANAUX
 02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
NET BOX DATA Télégestion d'équipements via Internet & Intranet
 MANUEL SIMPLIFIEDE L UTILISATEUR ------------------------------------------- Système de réservation de place de stationnement VigiPark2.COM Réf. : DT100502 Rév. : A Date : 24/01/2006 Auteur : Christophe
MANUEL SIMPLIFIEDE L UTILISATEUR ------------------------------------------- Système de réservation de place de stationnement VigiPark2.COM Réf. : DT100502 Rév. : A Date : 24/01/2006 Auteur : Christophe
KX-NCP500 / KX-NCP1000
 KX-NCP500 / KX-NCP1000 Plateforme de communication réseau Communications unifiées en tout temps et en tout lieu Les communications : un facteur de succès Exploitez au mieux les possibilités de votre entreprise
KX-NCP500 / KX-NCP1000 Plateforme de communication réseau Communications unifiées en tout temps et en tout lieu Les communications : un facteur de succès Exploitez au mieux les possibilités de votre entreprise
PRESENTATION RESSOURCES. Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille
 PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
NXT Guide de mise en route. Rob Widger
 NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS. A déplacement manuel : Power Tower et Nano. Automotrices. Nano SP
 AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS A déplacement manuel : Power Tower et Nano Automotrices Nano SP LE GUIDE DE L ÉLÉVATION À FAIBLE HAUTEUR Qu est ce que le low level access ( l élévation
AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS A déplacement manuel : Power Tower et Nano Automotrices Nano SP LE GUIDE DE L ÉLÉVATION À FAIBLE HAUTEUR Qu est ce que le low level access ( l élévation
Votre automate GSM fiable et discret
 Installation facile, programmation rapide! Votre automate GSM fiable et discret GD-04 est un automate GSM. Il envoie des SMS, appelle, met en marche, arrête, surveille. Il ne sait pas parler mais pourtant
Installation facile, programmation rapide! Votre automate GSM fiable et discret GD-04 est un automate GSM. Il envoie des SMS, appelle, met en marche, arrête, surveille. Il ne sait pas parler mais pourtant
Guide de l Accessibilité. des Etablissements. Recevant du Public
 Guide de l Accessibilité des Etablissements Recevant du Public Direction du Développement Commerce Tourisme Réaliser un projet qui garantit l égalité d accès : S assurer que les entrées principales soient
Guide de l Accessibilité des Etablissements Recevant du Public Direction du Développement Commerce Tourisme Réaliser un projet qui garantit l égalité d accès : S assurer que les entrées principales soient
Système d alarme sans fil GSM / SMS / RFID. www.camshop.fr
 Système d alarme sans fil GSM / SMS / RFID Caractéristiques Panneau de contrôle Reconnait jusqu à 10 télécommandes Peut être connectée jusqu à 50 capteurs sans fil (contacts porte / fenêtre, radars ) Peut
Système d alarme sans fil GSM / SMS / RFID Caractéristiques Panneau de contrôle Reconnait jusqu à 10 télécommandes Peut être connectée jusqu à 50 capteurs sans fil (contacts porte / fenêtre, radars ) Peut
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique...
 1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
Programme. 048884-EcranTactile-01 MANUEL DE MISE EN ŒUVRE
 Programme d application 048884-EcranTactile-01 MANUEL DE MISE EN ŒUVRE Sommaire 4 5 7 10 11 13 14 18 19 21 22 Description des fonctionnalités du produit Généralité concernant le fonctionnement Utilisation
Programme d application 048884-EcranTactile-01 MANUEL DE MISE EN ŒUVRE Sommaire 4 5 7 10 11 13 14 18 19 21 22 Description des fonctionnalités du produit Généralité concernant le fonctionnement Utilisation
Création d une application Android (APPInventor)
") 1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
TP N 7 «ALARME INTRUSION» TP découverte «Alarme intrusion filaire LEGRAND»
 Lycée des Métiers «Louise Michel» Rue Villebois Mareuil 16700 RUFFEC T BACPRO ELEEC «ALARME INTRUSION» TP découverte «Alarme intrusion filaire LEGRAND» NOM :.... Prénom :... Page 1 / 11 L ALARME INTRUSION
Lycée des Métiers «Louise Michel» Rue Villebois Mareuil 16700 RUFFEC T BACPRO ELEEC «ALARME INTRUSION» TP découverte «Alarme intrusion filaire LEGRAND» NOM :.... Prénom :... Page 1 / 11 L ALARME INTRUSION
Notice de montage et d utilisation
 BECK-O-TRONIC 5 Version : Centronic fr Notice de montage et d utilisation Commande de porte Informations importantes pour: l'installateur / l'électricien / l'utilisateur À transmettre à la personne concernée!
BECK-O-TRONIC 5 Version : Centronic fr Notice de montage et d utilisation Commande de porte Informations importantes pour: l'installateur / l'électricien / l'utilisateur À transmettre à la personne concernée!
HAM841K CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION
 CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION MANUEL D'UTILISATION MANUEL D'UTILISATION CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION INTRODUCTION Le
CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION MANUEL D'UTILISATION MANUEL D'UTILISATION CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION INTRODUCTION Le
TVD 03 GSM - Transmetteur Téléphonique Vocal
 Transmetteur téléphonique vocal GSM TVD 03 - GSM Version 1.0-A ZI Sud Est Tel : 02.99.85.28.28 15 Rue des Veyettes Fax : 02.99.85.28.29 CS 76326 35063 RENNES CEDEX E.mail:info@sodis-france.fr TVD 03 GSM
Transmetteur téléphonique vocal GSM TVD 03 - GSM Version 1.0-A ZI Sud Est Tel : 02.99.85.28.28 15 Rue des Veyettes Fax : 02.99.85.28.29 CS 76326 35063 RENNES CEDEX E.mail:info@sodis-france.fr TVD 03 GSM
FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI
 : 0033 (0)169922672 : 0033 (0)169922674 : www.sordalab.com @ : info@sordalab.com FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI Fourche optique numérique Réf. BEESPI Page 1 sur 5 1. MESURES DE PRECAUTION Tenir
: 0033 (0)169922672 : 0033 (0)169922674 : www.sordalab.com @ : info@sordalab.com FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI Fourche optique numérique Réf. BEESPI Page 1 sur 5 1. MESURES DE PRECAUTION Tenir
Casisa Anthony DOSSIER PERSONNEL
 Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
PRODUCTION DE L ENERGIE ELECTRIQUE
 PRODUCTION DE L ENERGIE ELECTRIQUE Fiche Élève i Objectifs Connaître le principe de production de l électricité par une génératrice de vélo. Savoir quelle est la partie commune à toutes les centrales électriques.
PRODUCTION DE L ENERGIE ELECTRIQUE Fiche Élève i Objectifs Connaître le principe de production de l électricité par une génératrice de vélo. Savoir quelle est la partie commune à toutes les centrales électriques.
DIAGNOSTIQUER EN UTILISANT L INFORMATIQUE
 DIAGNOSTIQUER EN UTILISANT L INFORMATIQUE Maintenance industrielle Niveau IV CAFOC - GIP de l académie de Lyon - 39, rue Pierre Baizet - CP201-69336 Lyon cedex 09 04 72 19 80 21-04 78 47 27 11 - gipal-cafoc@ac-lyon.fr
DIAGNOSTIQUER EN UTILISANT L INFORMATIQUE Maintenance industrielle Niveau IV CAFOC - GIP de l académie de Lyon - 39, rue Pierre Baizet - CP201-69336 Lyon cedex 09 04 72 19 80 21-04 78 47 27 11 - gipal-cafoc@ac-lyon.fr
CFAO. Conception et Fabrication Assistée par Ordinateur. Le matériel utilisé en CFAO : un SYSTÈME AUTOMATISÉ. Barbecue Assisté par Ordinateur
 11 Découverte d'un système de CFAO Conception et Fabrication Assistée par Ordinateur CFAO Barbecue Assisté par Ordinateur Un système automatisé pour la salle des professeurs : la CAO (Cafetière Assistée
11 Découverte d'un système de CFAO Conception et Fabrication Assistée par Ordinateur CFAO Barbecue Assisté par Ordinateur Un système automatisé pour la salle des professeurs : la CAO (Cafetière Assistée
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Notice de montage, d utilisation et de maintenance
 SmartTouch confort d accès NB506N avec technique de transpondeur à longue portée Notice de montage, d utilisation et de maintenance Notice de montage et d utilisation pour le client final MBW26-FR/07.15-6
SmartTouch confort d accès NB506N avec technique de transpondeur à longue portée Notice de montage, d utilisation et de maintenance Notice de montage et d utilisation pour le client final MBW26-FR/07.15-6
ALARME DOMESTIQUE FILAIRE
 ALARME DOMESTIQUE FILAIRE DOSSIER RESSOURCES Académie de LYON BAC Pro Électrotechnique, Énergie, Équipements Communicants Page 1 sur 15 SOMMAIRE Introduction... page 3/15 Le sous-système : maquette alarme
ALARME DOMESTIQUE FILAIRE DOSSIER RESSOURCES Académie de LYON BAC Pro Électrotechnique, Énergie, Équipements Communicants Page 1 sur 15 SOMMAIRE Introduction... page 3/15 Le sous-système : maquette alarme
TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3 & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3. SIMULATION 7 " - 4.
 '*+ , ##) # -. /0 1 2 3. SIMULATION 7 - 4.") TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3! " #$ % & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3' & 3. SIMULATION 7 0 ( 0, - 0 - " - & 1 4. LA SOURIS 11 5. LES RACCOURCIS CLAVIER 11 STI Electronique
TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3! " #$ % & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3' & 3. SIMULATION 7 0 ( 0, - 0 - " - & 1 4. LA SOURIS 11 5. LES RACCOURCIS CLAVIER 11 STI Electronique
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Réglage, paramétrage, contrôle, modification. Salle de conférence.
 Réglage, paramétrage, contrôle, modification. Salle de conférence. Session 2011 Enseignants : Laurent BOUSQUET Bernard TAULOU SYSTEME : Salle de conférence THEME D ETUDE : Automatisme du bâtiment CCF sous
Réglage, paramétrage, contrôle, modification. Salle de conférence. Session 2011 Enseignants : Laurent BOUSQUET Bernard TAULOU SYSTEME : Salle de conférence THEME D ETUDE : Automatisme du bâtiment CCF sous
Chapitre 18 : Transmettre et stocker de l information
 Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
MODE OPÉRATOIRE. VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.
 Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.") VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
Définition. Caractéristiques. - Du partage des ressources : espace de stockage, imprimantes, lignes de communication.
 CONNECTER LES SYSTEMES ENTRE EUX L informatique, au cœur des tâches courantes, a permis de nombreuses avancées technologiques. Aujourd hui, la problématique est de parvenir à connecter les systèmes d information
CONNECTER LES SYSTEMES ENTRE EUX L informatique, au cœur des tâches courantes, a permis de nombreuses avancées technologiques. Aujourd hui, la problématique est de parvenir à connecter les systèmes d information
Robot WIFIBOT Lab V3. 4 roues motrices
 4 roues motrices Lab V3 Robot WIFIBOT Lab V3 Architecture modulaire et ouverte Contrôlable en RS232 ou en Wifi PC x86 embarqué avec une image Xpe ou Linux Ubuntu Le Wifibot Lab est une plate forme robotique
4 roues motrices Lab V3 Robot WIFIBOT Lab V3 Architecture modulaire et ouverte Contrôlable en RS232 ou en Wifi PC x86 embarqué avec une image Xpe ou Linux Ubuntu Le Wifibot Lab est une plate forme robotique
NOTICE D UTILISATION
 RTC Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-rtc-f8/ pour accéder à la notice vidéo du kit d alarme NFO-480008-1307 NOTICE D UTILISATION Sommaire
RTC Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-rtc-f8/ pour accéder à la notice vidéo du kit d alarme NFO-480008-1307 NOTICE D UTILISATION Sommaire
ULC-S536-04 Inspection et mise à l essai des réseaux avertisseurs d incendie
 ULC-S536-04 Inspection et mise à l essai des réseaux avertisseurs d incendie Séminaire technique ACAI 14 novembre 2013 Par : Pierre Noël STRUCTURE DE LA NORME Les réseaux avertisseurs d incendie doivent
ULC-S536-04 Inspection et mise à l essai des réseaux avertisseurs d incendie Séminaire technique ACAI 14 novembre 2013 Par : Pierre Noël STRUCTURE DE LA NORME Les réseaux avertisseurs d incendie doivent
Sur un ordinateur portable ou un All-in-One tactile, la plupart des éléments mentionnés précédemment sont regroupés. 10) 11)
 11)") 1/ Généralités : Un ordinateur est un ensemble non exhaustif d éléments qui sert à traiter des informations (documents de bureautique, méls, sons, vidéos, programmes ) sous forme numérique. Il est en général
1/ Généralités : Un ordinateur est un ensemble non exhaustif d éléments qui sert à traiter des informations (documents de bureautique, méls, sons, vidéos, programmes ) sous forme numérique. Il est en général
Prise en main rapide
 Objectif terminal Réaliser un objet communicant Pourquoi? : 20 millards d objets connectés en 2020! Quelques mots sur l outil de développement App Inventor App Inventor pour Android est une application
Objectif terminal Réaliser un objet communicant Pourquoi? : 20 millards d objets connectés en 2020! Quelques mots sur l outil de développement App Inventor App Inventor pour Android est une application
ARTICLE. Dix raisons d acheter une caméra réseau ou ce que votre fournisseur de caméras analogiques ne vous révèlera jamais
 ARTICLE Dix raisons d acheter une caméra réseau ou ce que votre fournisseur de caméras analogiques ne vous révèlera jamais TABLE DES MATIÈRES Introduction 3 Dix arguments que ne vous révèlera pas votre
ARTICLE Dix raisons d acheter une caméra réseau ou ce que votre fournisseur de caméras analogiques ne vous révèlera jamais TABLE DES MATIÈRES Introduction 3 Dix arguments que ne vous révèlera pas votre
CARACTÉRISTIQUES COMMUNES À TOUS LES MODÈLES
 CARACTÉRISTIQUES COMMUNES À TOUS LES MODÈLES Le cœur du produit de pointe que nous avons étudié et réalisé pour le secteur médical est représenté par le nouveau thermostat électronique HACCP, de série
CARACTÉRISTIQUES COMMUNES À TOUS LES MODÈLES Le cœur du produit de pointe que nous avons étudié et réalisé pour le secteur médical est représenté par le nouveau thermostat électronique HACCP, de série
Caméra de surveillance avec capteur PIR, pour PX-3746
 Caméra de surveillance avec capteur PIR, pour PX-3746 FR Mode d'emploi PX-3747-675 FR TABLE DES MATIÈRES Votre nouvelle caméra de surveillance...3 Chère cliente, cher client,...3 Contenu...3 Caractéristiques...4
Caméra de surveillance avec capteur PIR, pour PX-3746 FR Mode d'emploi PX-3747-675 FR TABLE DES MATIÈRES Votre nouvelle caméra de surveillance...3 Chère cliente, cher client,...3 Contenu...3 Caractéristiques...4
Conception Electronique (CEL) Prof. Maurizio Tognolini
 Prof. Maurizio Tognolini") Conception Electronique (CEL) Prof. Maurizio Tognolini iai institut d Automatisation industrielle MTI/CEL 19/09/2010 v2.0 1 CEL semestre «automne» 2010-2011 Enseignement: cours et labo: (Chaque semaine)
Conception Electronique (CEL) Prof. Maurizio Tognolini iai institut d Automatisation industrielle MTI/CEL 19/09/2010 v2.0 1 CEL semestre «automne» 2010-2011 Enseignement: cours et labo: (Chaque semaine)
SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T
 SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T Sirène solaire extérieure auto-alimentée sans fil avec récepteur intégré à code tournant. Boîtier polycarbonate de 3mm résistant aux intempéries, autoprotection
SIRENE SANS FIL SOLAIRE 433MHz 30/80m SSFS = SG-1100T Sirène solaire extérieure auto-alimentée sans fil avec récepteur intégré à code tournant. Boîtier polycarbonate de 3mm résistant aux intempéries, autoprotection
Notice de montage et d utilisation
 BECK-O-TRONIC 4 Version : Centronic fr Notice de montage et d utilisation Commande de porte Informations importantes pour: l'installateur / l'électricien / l'utilisateur À transmettre à la personne concernée!
BECK-O-TRONIC 4 Version : Centronic fr Notice de montage et d utilisation Commande de porte Informations importantes pour: l'installateur / l'électricien / l'utilisateur À transmettre à la personne concernée!
Plate-formes inclinées SUPRA & SUPRA LINEA
 Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Succès garanti et rapide avec. LEGO MINDSTORMS Education
 Succès garanti et rapide avec LEGO MINDSTORMS Education Introduction LEGO MINDSTORMS Education est un des moyens les plus passionnants pour aborder et explorer les sciences, la technologie et les mathématiques
Succès garanti et rapide avec LEGO MINDSTORMS Education Introduction LEGO MINDSTORMS Education est un des moyens les plus passionnants pour aborder et explorer les sciences, la technologie et les mathématiques
Voyons comment, même prisonnier de notre corps, on peut se mobiliser, communiquer et contrôler notre environnement
 Voyons comment, même prisonnier de notre corps, on peut se mobiliser, communiquer et contrôler notre environnement par Guy Robert, erg Natalie Martel,erg Plan de la présentation Fonctions possibles sur
Voyons comment, même prisonnier de notre corps, on peut se mobiliser, communiquer et contrôler notre environnement par Guy Robert, erg Natalie Martel,erg Plan de la présentation Fonctions possibles sur
Surveillance de Température sans fil
 commentaires: Surveillance de Température sans fil Données fiables & sécurisées Surveillance en continu & en directe Options d'alarme Accès aux données & rapport faciles normalisation Aides pour la conformité
commentaires: Surveillance de Température sans fil Données fiables & sécurisées Surveillance en continu & en directe Options d'alarme Accès aux données & rapport faciles normalisation Aides pour la conformité
My Custom Design ver.1.0
 My Custom Design ver.1.0 Logiciel de création de données de broderie Mode d emploi Avant d utiliser ce logiciel, veuillez lire attentivement ce mode d emploi pour bien l utiliser correctement. Conservez
My Custom Design ver.1.0 Logiciel de création de données de broderie Mode d emploi Avant d utiliser ce logiciel, veuillez lire attentivement ce mode d emploi pour bien l utiliser correctement. Conservez
Guide de paramétrage des contrôleurs Goldenmotor
 Cycloboost 7 rue de Mireport 33310 LORMONT Guide de paramétrage des contrôleurs Goldenmotor Version 5 ~ 12/06/2014 Web Support www.cycloboost.com Ouvrir un ticket Table des matières 1 Avant de commencer...2
Cycloboost 7 rue de Mireport 33310 LORMONT Guide de paramétrage des contrôleurs Goldenmotor Version 5 ~ 12/06/2014 Web Support www.cycloboost.com Ouvrir un ticket Table des matières 1 Avant de commencer...2
TOTALREX. Z.C Le Kenyah Nord 56400 PLOUGOUMELEN Tel : 02.97.24.48.98 ou 06.09.30.44.81 Fax : 02.97.24.01.56 Email : euroouest@orange.
 REX Tel : 02.97.24.48.98 ou 06.09.30.44.81 Fax : 02.97.24.01.56 Email : euroouest@orange.fr 1/14 La gae des plateformes à ciseaux s agrandit avec l arrivée de solutions qui permettent la présence d une
REX Tel : 02.97.24.48.98 ou 06.09.30.44.81 Fax : 02.97.24.01.56 Email : euroouest@orange.fr 1/14 La gae des plateformes à ciseaux s agrandit avec l arrivée de solutions qui permettent la présence d une
PIC EVAL Dev Board PIC18F97J60
 PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies