Courbes et surfaces. Algorithmique Graphique et Modélisation. Séverine Dubuisson. 20 mars 2007
|
|
|
- Arlette Gignac
- il y a 6 ans
- Total affichages :
Transcription
1 Algorithmique Graphique et Modélisation 20 mars 2007
2 Plan du cours 1 Introduction 2 Modèles polygonaux 3 de Bézier 4 Splines, nurbs 5 Modèles fractals
3 Les courbes et les surfaces sont présentes dans la majorité des applications faisant intervenir des images La plupart des scènes réelles ou virtuelles sont composées de courbes ou de surfaces Besoin de représenter les courbes et les surfaces dans deux cas : Modélisation à partir d un modeleur et sur la base d une description mathématique ou de manière interactive Modélisation à partir de données issues de mesures, de capteurs ou d images, en général des points de l espace l objet est modélisé par approximations (modèles mathématiques simples)
4 Principe des courbes polygonales Stocker un ensemble discret de points de la courbe et approximer la courbe entre ces points, par des segments de droites Représentations très répandues car simples pour x = 0 à x max faire tracer(x,f (x), x + ɛ x, f (x + ɛ x ), valeur) fin pour
 et interne (en mémoire)")
5 Principe des surfaces polygonales Stocker un ensemble discret de points de la surface et approcher la surface entre ces points, par des facettes polygonales Maillage polygonal : collection de sommets, côtés et polygones telle qu un côté est partagé par deux polygones au plus Problème : choisir une représentation adéquate, pour le stockage externe (dans un fichier) et interne (en mémoire) Quelles informations stocker et comment?
6 Représentation des surfaces polygonales Plusieurs représentations sont possibles Le choix se fait en fonction des besoins (coûts en espace et en temps) Les opérations typiques sur les maillages sont : Trouver les côtés incidents à un sommet Trouver les voisins d un sommet Trouver les polygones partageant un côté ou un sommet Trouver les côtés d un polygone Stocker en interne le maximum d informations pour éviter des calculs répétitifs (espace mémoire important) Compromis entre coût mémoire et coût en temps
7 Représentation en mémoire des surfaces polygonales Représentation explicite Un polygone est représenté par une structure P {(x 1, y 1, z 1 ), (x 2, y 2, z 2 ), (x 3, y 3, z 3 )} Deux sommets successifs représentent un côté Avantages / Inconvénients Mauvaise utilisation de l espace : sommets partagés dupliqués Difficulté pour établir des relations (côtés incidents,...)
8 Représentation en mémoire des surfaces polygonales Pointeurs sur une liste de sommets Sommets stockés dans une table : S = {S 1, S 2,..., S n } = {(x 1, y 1, z 1 ), (x 2, y 2, z 2 ),..., (x n, y n, z n )} Polygone défini par une liste d indices (ou de pointeurs) sur des sommets P = {(1, 2, 3), (1, 3, 4),...} Avantages / Inconvénients Sommets stockés une seule fois Difficulté pour établir des relations
9 Représentation en mémoire des surfaces polygonales Pointeurs sur une liste de côtés Sommets stockés dans une table : S = {S 1, S 2,..., S n} = {(x 1, y 1, z 1 ), (x 2, y 2, z 2 ),..., (x n, y n, z n)} Côtés stockés dans une table et définis par deux pointeurs sur des sommets et deux pointeurs sur des polygones : C = {C 1, C 2, C 3,...} = {(&S 1, &S 2, &P 1, ), (&S 2, &S 3, &P 1, ), (&S 1, &S 3, &P 1, &P 2 ),...} Polygones définis par une liste de pointeurs sur des côtés : C = {P 1, P 2,...} = {(&C 1, &C 2, &C 3 ), (&C 3, &C 4, &C 5 ),...}
10 Représentation en mémoire des surfaces polygonales Avantages / Inconvénients : pointeurs sur une liste de côtés Utilisation optimale de l espace mémoire : seuls des indices sont manipulés Les polygones partageant un côté sont identifiés Difficile de connaître les voisins d un sommet donné, les côtés incidents à un sommet,... Stockage d informations supplémentaires si nécessaire
11 Stockage des surfaces polygonales Format OFF Format minimal mais efficace et simple à gérer Possibilité de rajouter des informations pour chaque sommet : normale à la surface, couleurs,... Exemple OFF # début du f i c h i e r Nb sommets Nb polygones Nb cotes # nombres e n t i e r s # l e s coordonnées des sommets ( nombres r é e l s ) x1 y1 z1 x2 y2 z2 # pour chaque polygone : nb sommets, i n d i c e de chaque sommet # dans l a l i s t e precedente
12 Stockage des surfaces polygonales Format VRML Nécessite en plus la description des propriétés de la surface Format complet, beaucoup de possibilités : animation,... mais plus difficile à gérer (lecture, écriture) Format de description de scènes 3D Exemple Coordinate3 { p o i n t [ , ,... ] } IndexedFaceSet { coordindex [ 0, 1, 2, 2, 1, 3, 2, 4, 4, 1,... ] }
13 Les courbes paramétriques Les approximations polygonales sont des approximations linéaires par morceaux (1er degré) Nécessité d un grand nombre de points pour obtenir une bonne précision Une autre approche consiste à utiliser des modèles d ordre supérieur pour représenter les courbes et surfaces Les représentations paramétriques répondent à ce besoin : Apportent un gain en espace mémoire Possibilité de manipulations
14 Les courbes paramétriques Définition d une courbe paramétrique Une courbe paramétrique est définie par : x = x(t) y = y(t) z = z(t) On cherche à interpoler ou approcher une courbe à partir d un nombre fini de points, soit des courbes de la forme : P(t) = (x(t), y(t), z(t)) = n f i (t)p i avec 0 t 1 i=0

15 Courbes de Bézier Définition générale P(t) = n P i B i,n (t) 0 t 1 i=0 B i,n (t) = C n i t i (1 t) n i C n i = n! i!(n i)! B i,n sont les polynômes de Bernstein P i sont les points de contôle n est le nombre de points de contrôle utilisés (degré de la courbe + 1)
16 Polynômes de Bernstein Propriétés Elles sont positives : B i,n (t) 0 i, n et 0 t 1 Elles forment une partition de l unité : n i=0 B i,n(t) = 1 0 t 1 B 0,n (0) = B 1,n (1) = 1 B i,n (t) possède exactement un maximum dans l intervalle [0, 1], et c est la valeur u = i n
17 Polynômes de Bernstein Propriétés Symétrie : pour tout n, l ensemble des polynômes B i,n (t) est symétrique par rapport à u = 1 2 B i,n (t) = B n i,n (1 t) Par définition, B i,n (t) = 0 i < 0 ou i > n Définition par récurrence : B i,n (t) = (1 t)b i,n 1 (t) + tb i 1,n 1 (t)
18 Propriétés des courbes de Bézier La courbe est à l intérieur de l enveloppe convexe des points de contrôles La courbe commence par le point P 0 et se termine par le point P n mais ne passe pas a priori par les autres points de contrôle qui déterminent cependant l allure générale de la courbe P 0 P 1 est tangent à la courbe en P 0 et P n 1 P n est tangent à la courbe en P n Une courbe de Bézier est infiniment dérivable La courbe de Bézier est un segment si et seulement si les points de contrôle sont alignés
19 Propriétés des courbes de Bézier Chaque restriction d une courbe de Bézier est aussi une courbe de Bézier Un arc de cercle (ou un cercle) ne peut pas être décrit par une courbe de Bézier, quel que soit son degré Le contrôle de la courbe est global : modifier un point de contrôle modifie toute la courbe, et non pas un voisinage du point de contrôle Pour effectuer une transformation affine de la courbe, il suffit d effectuer la transformation sur tous les points de contrôle La projection d une courbe de Bézier ne s obtient pas à partir des projections des points de contrôle, dans le cas général
20 Utilisations des courbes de Bézier Composent l outil de la base du dessin vectoriel qui repose sur la transcription mathématique des objets Les plus importantes courbes de Bézier, sont les cubiques, utilisées : En informatique pour le graphisme Dans les systèmes de synthèse d images (PostScript, Metafont, The GIMP ) pour dessiner des courbes lisses joignant des points ou des polygones de Bézier Les textes sont définis par des courbes de Bézier (mise en page complexe, gestion de blocs de textes, habillages, vérification orthographique) Les fontes TrueType utilisent des courbes de Bézier quadratiques plus simples
21 Courbe de Bézier linéaire (degré 1) Deux points de contrôle : interpolation linéaire (barycentre) P(t) = (1 t)p 0 + tp 1 Il s agit du segment [P 0, P 1 ]
22 Courbe de Bézier quadratique (degré 2) Trois points de contrôle : P(t) = (1 t) 2 P 0 + 2t(1 t)p 1 + t 2 P 2 P(t) = t 2 (P 0 2P 1 + P 2 ) + t( 2P 0 + 2P 1 ) + P 0 P(t) = ( t 2 t 1 ) P P P 2
23 Propriétés d une courbe de Bézier quadratique A pour extrémités P 0 et P 2 et passe par K = milieu(i, J), avec I = milieu(p 0, P 1 ) et J = milieu(p 1, P 2 ) Est tangente en P 0 à (P 0, P 1 ), en P 2 à (P 1, P 2 ), en K à (I, J) Est l union de deux courbes de Bézier quadratiques : l une de points de contrôle P 0, I, K et l autre de points de contrôle K, J, P 2
24 Définition récursive d une courbe de Bézier quadratique Casteljau I est le barycentre de [P 0, P 1 ] : I = (1 t)p 0 + tp 1 J est le barycentre de [P 1, P 2 ] : J = (1 t)p 1 + tp 2 K est le barycentre de [I, J] : K = (1 t)i + tj Donc on a l équation de la courbe de Bézier : P(t) = (1 t)i + tj = (1 t) ((1 t)p 0 + tp 1 ) + t ((1 t)p 1 + tp 2 ) = (1 t 2 )P 0 + 2t(1 t)p 1 + t 2 P 2
25 Courbe de Bézier cubique (degré 3) Quatre points de contrôle : P(t) = (1 t) 3 P 0 + 3t(1 t) 2 P 1 + 3t 2 (1 t)p 2 + t 3 P 3 P(t) = t 3 ( P 0 + 3P 1 3P 2 + P 3 ) + t 2 (3P 0 6P 1 + 3P 2 ) + t( 3P 0 + 3P 1 ) + P P(t) = ` t 3 t 2 t P 0 B C B P P 2 A P 3
26 Propriétés d une courbe de Bézier cubique A pour extrémités P 0 et P 3 et passe par S 0 ( milieu des milieux des milieux ) Est tangente en P 0 à (P 0, P 1 ), en P 3 à (P 2, P 3 ), en S 0 à (R 2, S 1 ) Est l union de deux courbes de Bézier cubiques : l une de points de contrôle R 0, R 1, R 2, R 3 et l autre de points de contrôle S 0, S 1, S 2, S 3
27 Définition récursive d une courbe de Bézier cubique Casteljau A est le barycentre de [P 0, P 1 ] : A = (1 t)p 0 + tp 1 B est le barycentre de [P 1, P 2 ] : B = (1 t)p 1 + tp 2 C est le barycentre de [P 2, P 3 ] : C = (1 t)p 2 + tp 3 D est le barycentre de [A, B] : D = (1 t)a + tb E est le barycentre de [B, C] : E = (1 t)b + tc M est le barycentre de [D, E] : M = (1 t)d + te Donc on a l équation de la courbe de Bézier : P(t) = (1 t)d + te = (1 t 3 )P 0 + 3t(1 t) 2 P 1 + 3t 2 (1 t)p 2 + t 3 P 3
28 Pour résumer... La pondération des points de contrôle dans une courbe de Bézier à 3 points de contrôle est donnée par les 3 polynômes de Bernstein suivants : B 0,2 (t) = (1 t) 2 B 1,2 (t) = 2t(1 t) B 2,2 (t) = t 2 La pondération des points de contrôle dans une courbe de Bézier à 4 points de contrôle est donnée par les 4 polynômes de Bernstein suivants : B 0,3 (t) = (1 t) 3 B 1,3 (t) = 3t(1 t) 2 B 2,3 (t) = 3t 2 (1 t) B 3,3 (t) = t 3
29 Courbe de Bézier de degré supérieur à 4 Une courbe de Bézier à n points de contrôle se définit ainsi comme une construction récursive de barycentres dans les rapports (1 t) et t [ Le segment M k i (t) M k M k 1 i ] (t), M k 1 i+1 (t)] est tangent à la courbe en { i (t) = (1 t)m k 1 i (t) + tm k 1 k = 0, 1,..., n i+1 (t) i = 0, 1,..., n k
30 Définition de Casteljau Cas d une courbe à 5 points de contrôle
31 Polygonalisation des courbes de Bézier Polygonalisation d une courbe de Bézier en n pas avec un paramètre t défini sur [a, b]. Le paramètre t varie de a à b avec un pas de b a n
32 Continuité des courbes de Bézier C 0 continuité de classe 0 : on fait coïncider les points extrêmes C 1 continuité de classe 1 : vérifiée si les points extrêmes sont confondus et situés au milieu du point qui les précède et de celui qui les suit
33 Polygonalisation des courbes de Bézier // Algorithme : n pas avec a t b // Initialisation t = a P = Bezier(t) pas = (b a)/n // Boucle de traçage pour i = 1 to n faire t = t + pas P = Bezier(t ) Segment(P, P ) t = t P = P fin pour
34 En OpenGL glenable(gl MAP1 VERTEX 3) ; active l évaluateur de Bézier 1D pour des sommets 3D GLfloat ctrlpoints[4][3] = {{ -1.0, -1.0, 0.0}, { -1.0, 0.0, 0.0},{ 1.0, 0.0, 0.0}, { 1.0, 1.0, 0.0}} ; coordonnées des points de contrôle glmap1f(gl MAP1 VERTEX 3, 0.0, 1.0, 3, 4, &ctrlpoints[0][0]) ; définit un évaluateur 1D glbegin(gl LINE STRIP) ; for(i=0 ; i<=n ; i++) glevalcoord1f((glfloat)i/((float)n)) ; glend() ;
35 Inconvénients des courbes de Bézier Si on a plus de 4 (16) points de contrôles, il faut générer 2 (4) courbes (surfaces) Les tangentes sont définies aux extrémités de la courbe de Bézier, mais pas la dérivée d ordre 2 points d inflexions impossibles Si un point de contrôle change légèrement de position, l ensemble de la courbe (surface) est affectée Une alternative : les Splines
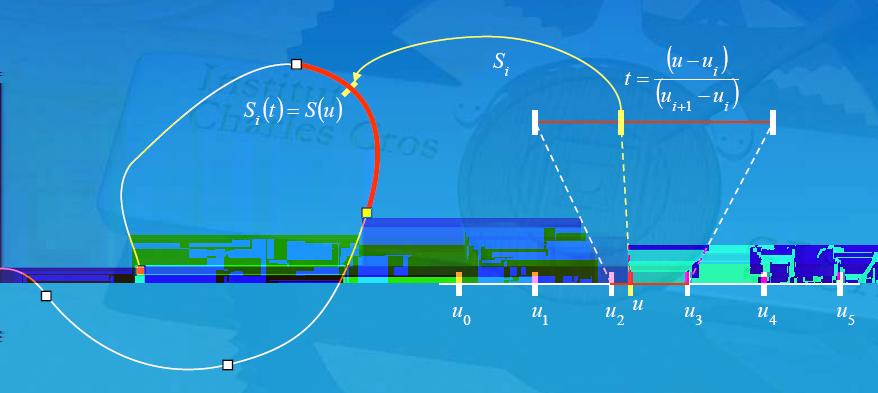
36 Surfaces de Bézier Définition Soient (n + 1) (m + 1) poins de contrôle P i,j avec 0 i n et 0 j m La surface de Bézier a pour équation : P(t) = n m P i,j B i,n (u)b j,m (v) 0 u, v 1 i=0 j=0 Une courbe peut être perçue comme une valeur particulière de la surface dans laquelle un paramètre est fixé. Ainsi C(u) est une valeur de la surface S(u, v) où v est fixé

37 Surfaces de Bézier
38 Surfaces de Bézier cubiques Une surface de Bézier cubique (n = m = 3) est définie par 16 points de contrôle P i,j, avec i [1... 4] et j [1..., 4] 4 points M k (t) (k [1... 4]) sur les courbes de Bézier cubiques définies par P k,j (j [1... 4]) Bords de la surface de Bézier Le point N(t, s) sur la courbe de Bézier définie par les quatre points M k (t) précédents
39 Surfaces de Bézier cubiques Pour un patch de degré n, on utilise (n + 1) 2 de points de contrôle M i,j On construit récursivement les points du patch par interpolation bilinéaire sur les paramètres u et v
40 Surfaces de Bézier cubiques
 qui sont définies par 4 points de contrôle intermédiaires, pour v (resp. u) fixé.")
41 Surfaces de Bézier cubiques En bleu : le maillage de contrôle formé par les 16 points P ij En rouge : les bords du carreau de surface de Bézier En pointillés verts les courbes de Bézier en u (resp. en v) qui sont définies par 4 points de contrôle intermédiaires, pour v (resp. u) fixé. Ces courbes appartiennent au carreau de surface
42 Surfaces de Bézier cubiques P(s, t) = ( s 3 s 2 s 1 ) P 0 P 1 P 2 P 3 P 4 P 5 P 6 P 7 P 8 P 9 P 10 P 11 P 12 P 13 P 14 P t 3 t 2 t 1
 dont les points de contrôles P i (v) parcourent des courbes de Bézier (en")
43 Surfaces de Bézier cubiques On peut envisager un patch comme un ensemble de courbes de Bézier (en u) dont les points de contrôles P i (v) parcourent des courbes de Bézier (en v)
44 Propriétés au bord Une surface de Bézier passe par les quatre points de contrôles aux coins Les quatre bords d une surface de Bézier sont des courbes de Bézier dont les points de contrôle sont M 0,j, M m,j, M i,0 ou M i,n Les normales aux coins de la surface sont les produits vectoriels des tangentes aux courbes des bords
45 En OpenGL glenable(gl MAP2 VERTEX 3) ; active l évaluateur de Bézier 2D pour des sommets 3D GLfloat ctrlpoints[4][3][3] =... ; coordonnées des points de contrôle glmap2f(gl MAP2 VERTEX 3, 0.0, 1.0, 3, 4, &ctrlpoints[0][0]) ; définit un évaluateur 2D glbegin(gl LINE STRIP) ; for(i=0 ; i<=m ; i++) glevalcoord2f((glfloat)i/((float)m)) ; glend() ; glbegin(gl LINE STRIP) ; for(i=0 ; i<=n ; i++) glevalcoord2f((glfloat)i/((float)n) ; glend() ;
46 Splines Définition Une spline de degré n est une fonction polynomiale par morceaux de degré n qui est continue de classe C n 1 à chaque nœud Une courbe spline est définie par n + 1 points de contrôle et n + 1 fonctions de pondération : P(t) = n i=0 N i,k(t)p i t k 1 t t n+1 Les fonctions de pondération N i,k (t) sont définies sur des intervalles [t i, t i+1 ], T = (t 0, t 1,..., t n k ) est appelé vecteur de points nodaux Les fonctions de pondération sont des polynômes d ordre k 1
47 B-Splines Définition : une courbe B-Spline d ordre k est définie par n + 1 points de contrôle P i : P 0,..., P n n k + 1 nœuds t 0 t 1... t n k n + 1 fonctions de pondération N i,k, ou polynômes B-splines, définies récursivement sur des intervalles [t i, t i+k ]
48 B-Splines Formultaion mathématique N i,1 (t) = N i,k (t) = { 1 sur [ti, t i+1 ] 0 ailleurs t t i N i,k 1 (t) + t i+k t N i+1,k 1 (t) t i+k 1 t i t i+k t i+1
49 B-Splines
50 Constructions de B-Splines d ordre k On définit les intervalles [t 0, t 1 ]... [t n+k 1, t n+k ] Pour simplifier, on choisit : t 0 = 0, t 1 = 1, On écrit la formulation récursive N i,k (t) On calcule sur chaque intervalle [t i, t i+k ] la courbe N i,k (t)
51 B-Splines d ordre k = 1 N 0,1 (t) = { 1 sur [0, 1] 0 ailleurs
52 B-Splines d ordre k = 2 Définition récursive générale : N i,2 (t) = t t i N i,1 (t) + t i+2 t N i+1,1 (t) t i+1 t i }{{} t i+2 t i+1 }{{} (1) (2) (1) : N i,1 (t) = 1 sur [t i, t i+1 ] (2) : N i+1,1 (t) = 1 sur [t i+1, t i+2 ] Définition sur [0, 2] N 0,2 (t) = t N 0,1 (t) +(2 t) N 1,1 (t) }{{}}{{} =1 sur [0,1] =1 sur [1,2]
53 B-Splines d ordre k = 2 N 0,2 (t) = { t sur [0, 1] 2 t sur [1, 2]
54 B-Splines d ordre k = 3 Définition récursive générale : N i,3 (t) = t t i N i,2 (t) + t i+3 t N i+1,2 (t) t i+2 t i t i+3 t i+1 Définition sur [0, 3] N 0,3 (t) = t 2 N 0,2(t) + 3 t }{{} 2 N 1,2(t) }{{} (1) (2)
55 B-Splines d ordre k = 3 Calcul de N 0,2 (t) : N 0,2 (t) = { t sur [0, 1] 2 t sur [1, 2] Calcul de N 1,2 (t) : N 1,2 (t) = (t 1) N 1,1 (t) +(3 t) N 2,1 (t) }{{}}{{} =1 sur[1,2] =1 sur[2,3]
56 B-Splines d ordre k = 3 N 0,3 (t) = t 2 2 sur [0, 1] t 2 + 3t 3 2 sur [1, 2] (3 t) 2 2 sur [2, 3]
57 Construction d une fonction de pondération à partir de splines Les fonction splines sont translatées puis combinées Sur [0, 1] : N 0,3 (t) Sur [1, 2] : N 0,3 (t) et N 1,3 (t) = N 0,3 (t 1) Sur [2, 3] : N 0,3 (t), N 1,3 (t) = N 0,3 (t 1) et N 2,3 (t) = N 0,3 (t 2) Sur [3, 4] : N 1,3 (t) = N 0,3 (t 1), N 2,3 (t) = N 0,3 (t 2) et N 3,3 (t) = N 0,3 (t 3)...
58 Tracé de courbes B-spline d ordre k = 3 Cas où on a 7 points de contrôle On veut tracer dans l intervalle [2, 7] Chaque fonction de pondération N i,3 est nulle hors de [i, i + 3] Dans [2, 7], on a : N(t) = N 0,3 (t)p 1 + N 1,3 (t)p 2 + N 2,3 (t)p 3 + N 3,3 (t)p 4 +N 4,3 (t)p 5 + N 5,3 (t)p 6 + N 6,3 (t)p 7
59 Tracé de courbes B-spline d ordre k = 3 t P 1 P 2 P 3 P 4 P 5 P 6 P
60 Tracé de courbes B-spline d ordre k = 3
61 Quelques propriétés des B-splines Toute courbe B-spline commence par un point sur la première arête du polygone de contrôle et est tangente a celui-ci (idem pour le dernier point) Les points intermédiaires sont des points de contrôle externes à la courbe La transformée affine d une courbe B-spline est la courbe passant par la transformée affine des points Une courbe B-spline appartient à l enveloppe convexe des points qui la contrôlent Si elle est d ordre n, elle appartient à l enveloppe convexe de n 1 points consécutifs
62 Courbes nurbs Nurbs : Non Uniform Rational B-Splines Une courbe nurbs de degré k est définie par : Un vecteur de nœuds T = (t 0, t 1,...) n + 1 points de contrôle P i n + 1 fonctions de pondération R i,k déduites des fonctions de pondération des B-splines N i,k au moyen de n + 1 poids w i (généralement choisis positifs stricts) : R i,k = n i=0 w ip i N i,k (t) n i=0 w in i,k (t)
63 Tracé de courbes
64 Quelques propriétés des nurbs En choisissant correctement les points de contrôle et les poids, toute conique peut être représentée exactement par une nurbs La transformée affine d une courbe nurbs est la courbe passant par la transformée des points Contrairement aux courbes B-spline, l image d une courbe nurbs par une projection est la courbe nurbs passant par la projection des points les poids doivent être recalculés en fonction de la matrice de projection En raison de ces propriétés, les nurbs sont fournies dans de nombreux logiciels d infographie
65 Surfaces nurbs Les surfaces nurbs s obtiennent par extension de la définition des courbes nurbs Deux vecteurs de noeuds T et S, un pour chacune des variables t et s, (m + 1) (n + 1) points de contrôle P i,j (m + 1)x(n + 1) fonctions de pondération R i,j,k déduites des fonctions de pondération des B-splines N au moyen de (m + 1)x(n + 1) poids w i,j : R i,j,k = n m i=0 j=0 w i,jp i,j N i,n (t)n j,m (s) n m i=0 j=0 w i,kn i,n (t)n j,m (s)

66 Surfaces nurbs
67 Introduction Terme issu du latin frangere et proposé en 1982 par Mandelbrot Utilisés par la communauté graphique pour décrire tout modèle irrégulier et fragmenté pour lequel les irrégularités sont conservées (on parle d auto-similarité) On génère des fonctions récursives utilisant un motif initial et un motif de remplacement Un objet est dit fractal lorsque le processus de remplacement est appliqué à l infini pour la création de l objet Les fractales sont utilisées pour modéliser des environnements naturels (montagnes, feuillages, ciel nuageux,...)
68 Courbes fractales Définition Pour générer une courbe fractale, on remplace à l étape i les segments du motif de l étape (i 1) par le motif de remplacement Lorsque le processus est répété à l infini, la courbe est dite auto-similaire : la courbe entière est similaire à une sous-partie d elle même
69 Flocon de Koch La dimension fractale d de la courbe est définie par n 1 d n : nombre de parties du motif (ici n = 4) f : facteur de diminution (ici f = 3) La dimension est donc : d = log 4 log 3 = 1.26 = f


70 D autres exemples
71 Surfaces fractales Les surfaces sont générées de manière similaires aux courbes Exemple : l algorithme de Fournier-Russel-Carpenter permet de générer des montagnes fractales. Chaque segment est subdivisé en deux et la hauteur du point milieu de chaque segment est modifiée de manière aléatoire

72 Surfaces fractales : montagnes

73 Surfaces fractales : le ciel
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M belayach@fsr.ac.ma 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M belayach@fsr.ac.ma 1 1.Le réseau
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Chapitre 5 : Flot maximal dans un graphe
 Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
05/09/2015. M Ponctualité : CM TD TP & Projet Æ En cas d absence : récupérer!!! 3 05/09/2015
 Synthèse d images L3 Présentation du module Sandrine LANQUETIN Bureau G08 sandrine.lanquetin@u-bourgogne.fr Qui? Quand? Mode d emploi M Intervenants : Æ S. Lanquetin sandrine.lanquetin@u-bourgogne.fr M
Synthèse d images L3 Présentation du module Sandrine LANQUETIN Bureau G08 sandrine.lanquetin@u-bourgogne.fr Qui? Quand? Mode d emploi M Intervenants : Æ S. Lanquetin sandrine.lanquetin@u-bourgogne.fr M
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Exercices Alternatifs. Quelqu un aurait-il vu passer un polynôme?
 Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs. Quelqu un aurait-il vu passer un polynôme?
 Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices Alternatifs Quelqu un aurait-il vu passer un polynôme? c 2004 Frédéric Le Roux, François Béguin (copyleft LDL : Licence pour Documents Libres). Sources et figures: polynome-lagrange/. Version
Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT
 Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT Ces exercices portent sur les items 2, 3 et 5 du programme d informatique des classes préparatoires,
Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT Ces exercices portent sur les items 2, 3 et 5 du programme d informatique des classes préparatoires,
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Architecture des Systèmes d Information Architecture des Systèmes d Information
 Plan... Tableaux et tris I3 - Algorithmique et programmation 1 Rappels Nicol Delestre 2 Tableaux à n dimensions 3 Initiation aux tris Tableaux - v2.0.1 1 / 27 Tableaux - v2.0.1 2 / 27 Rappels : tableau
Plan... Tableaux et tris I3 - Algorithmique et programmation 1 Rappels Nicol Delestre 2 Tableaux à n dimensions 3 Initiation aux tris Tableaux - v2.0.1 1 / 27 Tableaux - v2.0.1 2 / 27 Rappels : tableau
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Chp. 4. Minimisation d une fonction d une variable
 Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Formats d images. 1 Introduction
 Formats d images 1 Introduction Lorsque nous utilisons un ordinateur ou un smartphone l écran constitue un élément principal de l interaction avec la machine. Les images sont donc au cœur de l utilisation
Formats d images 1 Introduction Lorsque nous utilisons un ordinateur ou un smartphone l écran constitue un élément principal de l interaction avec la machine. Les images sont donc au cœur de l utilisation
Baccalauréat L spécialité, Métropole et Réunion, 19 juin 2009 Corrigé.
 Baccalauréat L spécialité, Métropole et Réunion, 19 juin 2009 Corrigé. L usage d une calculatrice est autorisé Durée : 3heures Deux annexes sont à rendre avec la copie. Exercice 1 5 points 1_ Soit f la
Baccalauréat L spécialité, Métropole et Réunion, 19 juin 2009 Corrigé. L usage d une calculatrice est autorisé Durée : 3heures Deux annexes sont à rendre avec la copie. Exercice 1 5 points 1_ Soit f la
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Resolution limit in community detection
 Introduction Plan 2006 Introduction Plan Introduction Introduction Plan Introduction Point de départ : un graphe et des sous-graphes. But : quantifier le fait que les sous-graphes choisis sont des modules.
Introduction Plan 2006 Introduction Plan Introduction Introduction Plan Introduction Point de départ : un graphe et des sous-graphes. But : quantifier le fait que les sous-graphes choisis sont des modules.
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Sujet 4: Programmation stochastique propriétés de fonction de recours
 Sujet 4: Programmation stochastique propriétés de fonction de recours MSE3313: Optimisation Stochastiqe Andrew J. Miller Dernière mise au jour: October 19, 2011 Dans ce sujet... 1 Propriétés de la fonction
Sujet 4: Programmation stochastique propriétés de fonction de recours MSE3313: Optimisation Stochastiqe Andrew J. Miller Dernière mise au jour: October 19, 2011 Dans ce sujet... 1 Propriétés de la fonction
modélisation solide et dessin technique
 CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Construction d un cercle tangent à deux cercles donnés.
 Préparation au CAPES Strasbourg, octobre 2008 Construction d un cercle tangent à deux cercles donnés. Le problème posé : On se donne deux cercles C et C de centres O et O distincts et de rayons R et R
Préparation au CAPES Strasbourg, octobre 2008 Construction d un cercle tangent à deux cercles donnés. Le problème posé : On se donne deux cercles C et C de centres O et O distincts et de rayons R et R
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE
 COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
Licence à distance Chapitre V : Equations différentielles. Méthodes numériques à un pas.
 Licence à distance Chapitre V : Equations différentielles. Méthodes numériques à un pas. M. Granger Table des matières 1 Rappels sur le cours d équations différentielles 2 1.1 Généralités..........................................
Licence à distance Chapitre V : Equations différentielles. Méthodes numériques à un pas. M. Granger Table des matières 1 Rappels sur le cours d équations différentielles 2 1.1 Généralités..........................................
Correction du baccalauréat ES/L Métropole 20 juin 2014
 Correction du baccalauréat ES/L Métropole 0 juin 014 Exercice 1 1. c.. c. 3. c. 4. d. 5. a. P A (B)=1 P A (B)=1 0,3=0,7 D après la formule des probabilités totales : P(B)=P(A B)+P(A B)=0,6 0,3+(1 0,6)
Correction du baccalauréat ES/L Métropole 0 juin 014 Exercice 1 1. c.. c. 3. c. 4. d. 5. a. P A (B)=1 P A (B)=1 0,3=0,7 D après la formule des probabilités totales : P(B)=P(A B)+P(A B)=0,6 0,3+(1 0,6)
Initiation à l algorithmique
 Informatique S1 Initiation à l algorithmique procédures et fonctions 2. Appel d une fonction Jacques TISSEAU Ecole Nationale d Ingénieurs de Brest Technopôle Brest-Iroise CS 73862-29238 Brest cedex 3 -
Informatique S1 Initiation à l algorithmique procédures et fonctions 2. Appel d une fonction Jacques TISSEAU Ecole Nationale d Ingénieurs de Brest Technopôle Brest-Iroise CS 73862-29238 Brest cedex 3 -
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
Table des matières. I Mise à niveau 11. Préface
 Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
ÉVALUATION FORMATIVE. On considère le circuit électrique RC représenté ci-dessous où R et C sont des constantes strictement positives.
 L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
introduction Chapitre 5 Récursivité Exemples mathématiques Fonction factorielle ø est un arbre (vide) Images récursives
 Images récursives") introduction Chapitre 5 Images récursives http ://univ-tln.fr/~papini/sources/flocon.htm Récursivité http://www.poulain.org/fractales/index.html Image qui se contient elle-même 1 Exemples mathématiques
introduction Chapitre 5 Images récursives http ://univ-tln.fr/~papini/sources/flocon.htm Récursivité http://www.poulain.org/fractales/index.html Image qui se contient elle-même 1 Exemples mathématiques
CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE. EQUATIONS DIFFERENTIELLES.
 CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE EQUATIONS DIFFERENTIELLES Le but de ce chapitre est la résolution des deux types de systèmes différentiels linéaires
CHAPITRE V SYSTEMES DIFFERENTIELS LINEAIRES A COEFFICIENTS CONSTANTS DU PREMIER ORDRE EQUATIONS DIFFERENTIELLES Le but de ce chapitre est la résolution des deux types de systèmes différentiels linéaires
Master IMEA 1 Calcul Stochastique et Finance Feuille de T.D. n o 1
 Master IMEA Calcul Stochastique et Finance Feuille de T.D. n o Corrigé exercices8et9 8. On considère un modèle Cox-Ross-Rubinstein de marché (B,S) à trois étapes. On suppose que S = C et que les facteurs
Master IMEA Calcul Stochastique et Finance Feuille de T.D. n o Corrigé exercices8et9 8. On considère un modèle Cox-Ross-Rubinstein de marché (B,S) à trois étapes. On suppose que S = C et que les facteurs
Méthode : On raisonnera tjs graphiquement avec 2 biens.
 Chapiittrre 1 : L uttiilliitté ((lles ménages)) Définitions > Utilité : Mesure le plaisir / la satisfaction d un individu compte tenu de ses goûts. (On s intéresse uniquement à un consommateur rationnel
Chapiittrre 1 : L uttiilliitté ((lles ménages)) Définitions > Utilité : Mesure le plaisir / la satisfaction d un individu compte tenu de ses goûts. (On s intéresse uniquement à un consommateur rationnel
Plus courts chemins, programmation dynamique
 1 Plus courts chemins, programmation dynamique 1. Plus courts chemins à partir d un sommet 2. Plus courts chemins entre tous les sommets 3. Semi-anneau 4. Programmation dynamique 5. Applications à la bio-informatique
1 Plus courts chemins, programmation dynamique 1. Plus courts chemins à partir d un sommet 2. Plus courts chemins entre tous les sommets 3. Semi-anneau 4. Programmation dynamique 5. Applications à la bio-informatique
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Exo7. Matrice d une application linéaire. Corrections d Arnaud Bodin.
 Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Calcul différentiel. Chapitre 1. 1.1 Différentiabilité
 Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Chapitre 1 Calcul différentiel L idée du calcul différentiel est d approcher au voisinage d un point une fonction f par une fonction plus simple (ou d approcher localement le graphe de f par un espace
Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé
 10 septembre 2014 Corrigé") Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé A. P. M. E. P. Exercice 1 5 points 1. Réponse d. : 1 e Le coefficient directeur de la tangente est négatif et n est manifestement pas 2e
Baccalauréat ES Polynésie (spécialité) 10 septembre 2014 Corrigé A. P. M. E. P. Exercice 1 5 points 1. Réponse d. : 1 e Le coefficient directeur de la tangente est négatif et n est manifestement pas 2e
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
SINE QUA NON. Découverte et Prise en main du logiciel Utilisation de bases
 SINE QUA NON Découverte et Prise en main du logiciel Utilisation de bases Sine qua non est un logiciel «traceur de courbes planes» mais il possède aussi bien d autres fonctionnalités que nous verrons tout
SINE QUA NON Découverte et Prise en main du logiciel Utilisation de bases Sine qua non est un logiciel «traceur de courbes planes» mais il possède aussi bien d autres fonctionnalités que nous verrons tout
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Rappels sur les suites - Algorithme
 DERNIÈRE IMPRESSION LE 14 septembre 2015 à 12:36 Rappels sur les suites - Algorithme Table des matières 1 Suite : généralités 2 1.1 Déition................................. 2 1.2 Exemples de suites............................
DERNIÈRE IMPRESSION LE 14 septembre 2015 à 12:36 Rappels sur les suites - Algorithme Table des matières 1 Suite : généralités 2 1.1 Déition................................. 2 1.2 Exemples de suites............................
Quantification Scalaire et Prédictive
 Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Baccalauréat ES/L Amérique du Sud 21 novembre 2013
 Baccalauréat ES/L Amérique du Sud 21 novembre 2013 A. P. M. E. P. EXERCICE 1 Commun à tous les candidats 5 points Une entreprise informatique produit et vend des clés USB. La vente de ces clés est réalisée
Baccalauréat ES/L Amérique du Sud 21 novembre 2013 A. P. M. E. P. EXERCICE 1 Commun à tous les candidats 5 points Une entreprise informatique produit et vend des clés USB. La vente de ces clés est réalisée
Définitions. Numéro à préciser. (Durée : )
") Numéro à préciser (Durée : ) On étudie dans ce problème l ordre lexicographique pour les mots sur un alphabet fini et plusieurs constructions des cycles de De Bruijn. Les trois parties sont largement indépendantes.
Numéro à préciser (Durée : ) On étudie dans ce problème l ordre lexicographique pour les mots sur un alphabet fini et plusieurs constructions des cycles de De Bruijn. Les trois parties sont largement indépendantes.
TP : Gestion d une image au format PGM
 TP : Gestion d une image au format PGM Objectif : L objectif du sujet est de créer une classe de manipulation d images au format PGM (Portable GreyMap), et de programmer des opérations relativement simples
TP : Gestion d une image au format PGM Objectif : L objectif du sujet est de créer une classe de manipulation d images au format PGM (Portable GreyMap), et de programmer des opérations relativement simples
Examen optimisation Centrale Marseille (2008) et SupGalilee (2008)
 et SupGalilee (2008)") Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Examen optimisation Centrale Marseille (28) et SupGalilee (28) Olivier Latte, Jean-Michel Innocent, Isabelle Terrasse, Emmanuel Audusse, Francois Cuvelier duree 4 h Tout resultat enonce dans le texte peut
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer!
 JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Systèmes de transmission
 Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Programme de la 1ère année
 Programme de la 1ère année de master informatique Recopié du Syllabus M1 Informatique. 2004-2005 (UPS Toulouse) TC1 - Conception et Programmation Parallèle et Orientée Objet (96h) Objectif : Ce cours a
Programme de la 1ère année de master informatique Recopié du Syllabus M1 Informatique. 2004-2005 (UPS Toulouse) TC1 - Conception et Programmation Parallèle et Orientée Objet (96h) Objectif : Ce cours a
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Modèles à Événements Discrets. Réseaux de Petri Stochastiques
 Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
TPs Architecture des ordinateurs DUT Informatique - M4104c SUJETS. R. Raffin Aix-Marseille Université romain.raffin-at-univ-amu.fr
 TPs Architecture des ordinateurs DUT Informatique - M4104c SUJETS R. Raffin Aix-Marseille Université romain.raffin-at-univ-amu.fr 2015 Table des matières 1 TP 1 : prise en main 2 1.1 Introduction.......................................................
TPs Architecture des ordinateurs DUT Informatique - M4104c SUJETS R. Raffin Aix-Marseille Université romain.raffin-at-univ-amu.fr 2015 Table des matières 1 TP 1 : prise en main 2 1.1 Introduction.......................................................
Aide - mémoire gnuplot 4.0
 Aide - mémoire gnuplot 4.0 Nicolas Kielbasiewicz 20 juin 2008 L objet de cet aide-mémoire est de présenter les commandes de base pour faire rapidement de très jolis graphiques et courbes à l aide du logiciel
Aide - mémoire gnuplot 4.0 Nicolas Kielbasiewicz 20 juin 2008 L objet de cet aide-mémoire est de présenter les commandes de base pour faire rapidement de très jolis graphiques et courbes à l aide du logiciel
IV- Equations, inéquations dans R, Systèmes d équations
 IV- Equations, inéquations dans R, Systèmes d équations 1- Equation à une inconnue Une équation est une égalité contenant un nombre inconnu noté en général x et qui est appelé l inconnue. Résoudre l équation
IV- Equations, inéquations dans R, Systèmes d équations 1- Equation à une inconnue Une équation est une égalité contenant un nombre inconnu noté en général x et qui est appelé l inconnue. Résoudre l équation
Cours de Recherche Opérationnelle IUT d Orsay. Nicolas M. THIÉRY. E-mail address: Nicolas.Thiery@u-psud.fr URL: http://nicolas.thiery.
 Cours de Recherche Opérationnelle IUT d Orsay Nicolas M. THIÉRY E-mail address: Nicolas.Thiery@u-psud.fr URL: http://nicolas.thiery.name/ CHAPTER 1 Introduction à l optimisation 1.1. TD: Ordonnancement
Cours de Recherche Opérationnelle IUT d Orsay Nicolas M. THIÉRY E-mail address: Nicolas.Thiery@u-psud.fr URL: http://nicolas.thiery.name/ CHAPTER 1 Introduction à l optimisation 1.1. TD: Ordonnancement
Value at Risk. CNAM GFN 206 Gestion d actifs et des risques. Grégory Taillard. 27 février & 13 mars 20061
 Value at Risk 27 février & 13 mars 20061 CNAM Gréory Taillard CNAM Master Finance de marché et estion de capitaux 2 Value at Risk Biblioraphie Jorion, Philippe, «Value at Risk: The New Benchmark for Manain
Value at Risk 27 février & 13 mars 20061 CNAM Gréory Taillard CNAM Master Finance de marché et estion de capitaux 2 Value at Risk Biblioraphie Jorion, Philippe, «Value at Risk: The New Benchmark for Manain
TD : Codage des images
 TD : Codage des images Les navigateurs Web (Netscape, IE, Mozilla ) prennent en charge les contenus textuels (au format HTML) ainsi que les images fixes (GIF, JPG, PNG) ou animée (GIF animée). Comment
TD : Codage des images Les navigateurs Web (Netscape, IE, Mozilla ) prennent en charge les contenus textuels (au format HTML) ainsi que les images fixes (GIF, JPG, PNG) ou animée (GIF animée). Comment
www.h-k.fr/publications/objectif-agregation
 «Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
«Sur C, tout est connexe!» www.h-k.fr/publications/objectif-agregation L idée de cette note est de montrer que, contrairement à ce qui se passe sur R, «sur C, tout est connexe». Cet abus de langage se
ALGORITHMIQUE II NOTION DE COMPLEXITE. SMI AlgoII
 ALGORITHMIQUE II NOTION DE COMPLEXITE 1 2 Comment choisir entre différents algorithmes pour résoudre un même problème? Plusieurs critères de choix : Exactitude Simplicité Efficacité (but de ce chapitre)
ALGORITHMIQUE II NOTION DE COMPLEXITE 1 2 Comment choisir entre différents algorithmes pour résoudre un même problème? Plusieurs critères de choix : Exactitude Simplicité Efficacité (but de ce chapitre)
Programmation Linéaire - Cours 1
 Programmation Linéaire - Cours 1 P. Pesneau pierre.pesneau@math.u-bordeaux1.fr Université Bordeaux 1 Bât A33 - Bur 265 Ouvrages de référence V. Chvátal - Linear Programming, W.H.Freeman, New York, 1983.
Programmation Linéaire - Cours 1 P. Pesneau pierre.pesneau@math.u-bordeaux1.fr Université Bordeaux 1 Bât A33 - Bur 265 Ouvrages de référence V. Chvátal - Linear Programming, W.H.Freeman, New York, 1983.
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Recherche dans un tableau
 Chapitre 3 Recherche dans un tableau 3.1 Introduction 3.1.1 Tranche On appelle tranche de tableau, la donnée d'un tableau t et de deux indices a et b. On note cette tranche t.(a..b). Exemple 3.1 : 3 6
Chapitre 3 Recherche dans un tableau 3.1 Introduction 3.1.1 Tranche On appelle tranche de tableau, la donnée d'un tableau t et de deux indices a et b. On note cette tranche t.(a..b). Exemple 3.1 : 3 6
TP Blender n 2 : Importation d un modèle SketchUp et animation
 TP Blender n 2 : Importation d un modèle SketchUp et animation Service de Conception Géométrique Université de Liège Aérospatiale et Mécanique Conçu avec Blender 2.66 et SketchUp 8 De SketchUp à Blender
TP Blender n 2 : Importation d un modèle SketchUp et animation Service de Conception Géométrique Université de Liège Aérospatiale et Mécanique Conçu avec Blender 2.66 et SketchUp 8 De SketchUp à Blender
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
SECURIT GSM Version 2
 EOLE informatique SECURIT GSM Version 2 Notice d installation & Guide utilisateur Eole informatique 42 rue Claude Decaen -75012 Paris Tél. 01.43.43.00.97 www.eole-informatique.com 15/03/2006 SOMMAIRE Notice
EOLE informatique SECURIT GSM Version 2 Notice d installation & Guide utilisateur Eole informatique 42 rue Claude Decaen -75012 Paris Tél. 01.43.43.00.97 www.eole-informatique.com 15/03/2006 SOMMAIRE Notice
Jean-Philippe Préaux http://www.i2m.univ-amu.fr/~preaux
 Colonies de fourmis Comment procèdent les colonies de fourmi pour déterminer un chemin presque géodésique de la fourmilière à un stock de nourriture? Les premières fourmis se déplacent au hasard. Les fourmis
Colonies de fourmis Comment procèdent les colonies de fourmi pour déterminer un chemin presque géodésique de la fourmilière à un stock de nourriture? Les premières fourmis se déplacent au hasard. Les fourmis
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
TP N 57. Déploiement et renouvellement d une constellation de satellites
 TP N 57 Déploiement et renouvellement d une constellation de satellites L objet de ce TP est d optimiser la stratégie de déploiement et de renouvellement d une constellation de satellites ainsi que les
TP N 57 Déploiement et renouvellement d une constellation de satellites L objet de ce TP est d optimiser la stratégie de déploiement et de renouvellement d une constellation de satellites ainsi que les
Chapitre 3. Les distributions à deux variables
 Chapitre 3. Les distributions à deux variables Jean-François Coeurjolly http://www-ljk.imag.fr/membres/jean-francois.coeurjolly/ Laboratoire Jean Kuntzmann (LJK), Grenoble University 1 Distributions conditionnelles
Chapitre 3. Les distributions à deux variables Jean-François Coeurjolly http://www-ljk.imag.fr/membres/jean-francois.coeurjolly/ Laboratoire Jean Kuntzmann (LJK), Grenoble University 1 Distributions conditionnelles
Chapitre 3. Quelques fonctions usuelles. 1 Fonctions logarithme et exponentielle. 1.1 La fonction logarithme
 Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Adobe Illustrator Logiciel de dessin vectoriel et de Cartographie Assistée par Ordinateur
 Adobe Illustrator Logiciel de dessin vectoriel et de Cartographie Assistée par Ordinateur I- Ouverture d une nouvelle feuille de travail Fichier / Nouveau (ou ctrl + N) Indiquer dans la fenêtre qui s ouvre
Adobe Illustrator Logiciel de dessin vectoriel et de Cartographie Assistée par Ordinateur I- Ouverture d une nouvelle feuille de travail Fichier / Nouveau (ou ctrl + N) Indiquer dans la fenêtre qui s ouvre
Contexte. Pour cela, elles doivent être très compliquées, c est-à-dire elles doivent être très différentes des fonctions simples,
 Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
Non-linéarité Contexte Pour permettre aux algorithmes de cryptographie d être sûrs, les fonctions booléennes qu ils utilisent ne doivent pas être inversées facilement. Pour cela, elles doivent être très
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Modélisation et Simulation
 Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Visualisation Scientifique 3D
 Cours ENSIMAG Visualisation Scientifique 3D Stefanie Hahmann Laboratoire LMC-IMAG e-mail: hahmann@imagfr 1
Cours ENSIMAG Visualisation Scientifique 3D Stefanie Hahmann Laboratoire LMC-IMAG e-mail: hahmann@imagfr 1
Durée de L épreuve : 2 heures. Barème : Exercice n 4 : 1 ) 1 point 2 ) 2 points 3 ) 1 point
 1 point 2 ) 2 points 3 ) 1 point") 03 Mai 2013 Collège Oasis Durée de L épreuve : 2 heures. apple Le sujet comporte 4 pages et est présenté en livret ; apple La calculatrice est autorisée ; apple 4 points sont attribués à la qualité de
03 Mai 2013 Collège Oasis Durée de L épreuve : 2 heures. apple Le sujet comporte 4 pages et est présenté en livret ; apple La calculatrice est autorisée ; apple 4 points sont attribués à la qualité de
Cours 7 : Utilisation de modules sous python
 Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
Les nouveautés de Femap 11.1
 Siemens PLM Software Les nouveautés de Femap 11.1 Amélioration de la productivité des Ingénieurs calcul Avantages Manipulation plus rapide des modèles grâce à des performances graphiques améliorées Flexibilité
Siemens PLM Software Les nouveautés de Femap 11.1 Amélioration de la productivité des Ingénieurs calcul Avantages Manipulation plus rapide des modèles grâce à des performances graphiques améliorées Flexibilité
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
Algorithmique et Programmation
 École Supérieure d Ingénieurs de Poitiers Gea Algorithmique et Programmation Laurent Signac ii Algorithmique et programmation Gea Table des matières Avant Propos v Structures de données Notion de pointeur..............................................
École Supérieure d Ingénieurs de Poitiers Gea Algorithmique et Programmation Laurent Signac ii Algorithmique et programmation Gea Table des matières Avant Propos v Structures de données Notion de pointeur..............................................
Optimisation Discrète
 Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Prof F Eisenbrand EPFL - DISOPT Optimisation Discrète Adrian Bock Semestre de printemps 2011 Série 7 7 avril 2011 Exercice 1 i Considérer le programme linéaire max{c T x : Ax b} avec c R n, A R m n et
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
LES OUTILS D ALIMENTATION DU REFERENTIEL DE DB-MAIN
 LES OUTILS D ALIMENTATION DU REFERENTIEL DE DB-MAIN Les contenues de ce document sont la propriété exclusive de la société REVER. Ils ne sont transmis qu à titre d information et ne peuvent en aucun cas
LES OUTILS D ALIMENTATION DU REFERENTIEL DE DB-MAIN Les contenues de ce document sont la propriété exclusive de la société REVER. Ils ne sont transmis qu à titre d information et ne peuvent en aucun cas