Partie I : Implantation d un réseau de neurones RBF sur des systèmes embarqués : la détection et la reconnaissance de visages en temps réel
|
|
|
- Justin Robert
- il y a 8 ans
- Total affichages :
Transcription
1 1 Partie I : Implantation d un réseau de neurones RBF sur des systèmes embarqués : la détection et la reconnaissance de visages en temps réel F.Yang M.Paindavoine GDR-ISIS 20 Janvier 2005 Paris

2 2 Plan 1. Objectifs 2. Méthode proposée 3. AAA : Complexité algorithmique 4. Première implantation sur la puce spécifique 5. Deuxième implantation sur le FPGA 6. Troisième implantation sur le DSP C6x 7. Conclusion et perspectives

3 3 Processus de traitement Processus classique visage ou non visage? non visage! visage! personne connue ou inconnue?? Mr. X

4 4 2. Méthode proposée (basée sur une approche Adéquation Algo./Archi.) 2.1. Processus de traitement Processus utilisé Mr. X personne connue ou inconnue???

5 5 2. Méthode proposée 2.1. Processus de traitement Schéma global du système e =1 e = 2 3 e = 4 9 e = 8 27 Prétraitement Extraction des vecteurs caractéristiques Reconnaissance par réseau de neurones

6 2. Méthode proposée 2.2. Réseau neuronal RBF : modèle utilisé Entrées x Neurones cachés f i (x) p i j Sorties s j i =1... i... I j j = 1... j... J j j 6

7 7 2. Méthode proposée 2.2. Réseau neuronal RBF : neurone caché 1.2 x 1 x 2 f i d ( x) 2 2σ i ( x) = e x 3 ( i i c, σ ) σ i 0.6 x n x N f i ( x) x 0 C i

8 2. Méthode proposée 2.2. Réseau neuronal RBF : neurone de sortie f ( x 1 ) f 2 ( x) f 3 ( x) (x) f i p 1 j p 2 j 0.8 p 3 j p i j p I j 0.6 S j = I i= 1 p i j f ( x) i f I (x)
 i f I (x) 0.4 0.")
9 2. Méthode proposée 2.3. Configuration du modèle : choix des paramètres Taille des vecteurs caractéristiques Echantillonnage Taille vecteurs Nb. visages Non reco. Fausse reco. Ident. correctes Imagette brute (40x32) ,2% 1 pix./4 par ligne ,8% 1 pix./8 par ligne ,3% 1 pix./16 par ligne ,1% 1 pix./8 par lig. 1 pix./2 par col ,5% 9
 1280 1796 140 0 92,2% 1 pix./4 par ligne 320 1796 76 0 95,8% 1 pix.")
10 10 2. Méthode proposée 2.3. Configuration du modèle : choix des paramètres Mesure de distance Distance Taille vecteurs Nb. visages Non reco. Fausse reco. Ident. correctes d2(x) ,8% d1(x) ,4% d 2 ( x ) = N ( x n c n ) n = 1 2 d 1 ( x ) = N n = 1 x n c n
 320 1796 76 0 95,8% d1(x) 320 1796 64 0 96,4% d 2 ( x")
11 11 2. Méthode proposée 2.3. Configuration du modèle : choix des paramètres Fonction de réponse Fonction Taille vecteurs Nb. visages Non reco. Fausse reco. Ident. correctes Gaussienne ,4% Porte %

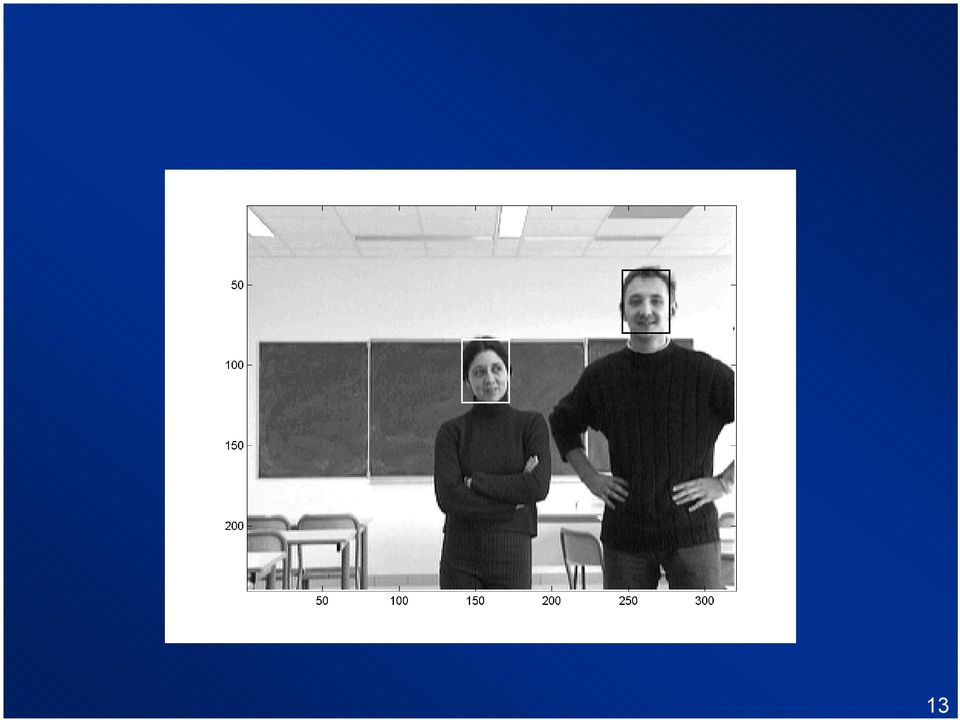
12 12 2. Méthode proposée 2.4. Résultats expérimentaux : reconnaissance à une échelle

13 13
14 14 2. Méthode proposée 2.4. Résultats expérimentaux reconnaissance multi-échelles

15 15 3. AAA : Analyse de Complexité L f f C l p p c L C 3.1 Nombre d imagettes à tester : + = 1 c f f p L L V + 1 l f p C C

16 Opérations nécessaires à l extraction d un vecteur pixels B composantes C f L f f f L B C B A = = l f f p C C L B C B A f L B D = 1 + = 1 l f p C C L B D

17 Opérations nécessaires au traitement des vecteurs par le réseau de neurone d1 ( x) = N n= 1 x n c n f i ( x) = 1 0 d( x) σ d( x) i > σ i _ ( N ) I V f A = 1 C = I V 2 f S = N I V f N + _ + I _ + _
 I V f A = 1 C = I V 2 f S = N I V f N + _ + I _")
18 18 4. Première implantation 4.1. Architecture de la carte Neuroseight

19 19 4. Première implantation 4.1. Architecture de la carte Neuroseight Connecteur Capteur CMOS JTAG FPGA Réseau Neuronal ZISC FPGA SRAM (1MO) FLASH EPROM CPLD Connecteur I/O Connecteur série RS 232

20 La puce ZISC Neurone ZISC = (un vecteur de 64 composantes + un rayon) mémorisés. (un soustracteur + un additionneur) pour calculer la distance d1. fonction d activation=fonction porte Avantages : - quantité importante de neurones (78xN puces ZISC) - apprentissage intégré Inconvénient : longueur limitée des vecteurs à tester (64 composantes).
 - apprentissage intégré Inconvénient : longueur limitée des vecteurs")
21 Complexité de l implantation Image 288 x 352. Analyse des imagettes de taille 32x32 (Pc=4, Pl=2) imagettes Vecteurs extraits de 64 composantes (limite du ZISC). Nombre de neurones cachés : 15 Système complet Additions Soustractions Divisions Comparaisons 20, , Calcul le plus coûteux=calcul de la distance d1(x)
22 Implantation sur la carte Localisation imagette à apprendre Apprentissage neurones FPGA ZISC Vidéo Acquisition image Extraction vecteurs caractéristiques Reconnaissance Stockage image (RAM) Balayage image
23 4.5. Analyse matérielle Slices BRAM SpartanII-50 Système complet (38%) 8 (512 Octets) 1 (12,5%) 23
24 Analyse temporelle Traitement image 1, x 30ns = 38,1 ms Chargement 64 1ères composantes de la 1ére colonne dans la FIFO Chargement 64 1ères composantes dans le ZISC Réponse ZISC Chargement 64 nouvelles composantes dans le ZISC Réponse ZISC Réponse ZISC Chargement 64 1ères composantes dans le ZISC 256T clk 64Tclk 54Tclk 64Tclk 54Tclk 54T clk 202T clk 64T clk 32T clk 32T clk 256T clk Chargement 8 nouvelles composantes dans la FIFO Chargement 8 nouvelles composantes dans la FIFO Chargement 64 1ères composantes de la colonne suivante dans la FIFO
25 Performances Nb. Visages à reconnaître Non reco. Fausses reco. Ident. correctes ,3% Inconvénient majeur du système: vecteurs de seulement 64 composantes
26 26 5. Deuxième implantation 5.1 Architecture de la carte MEMEC Connecteur Capt eur CMOS JTAG FPGA FPGA SRAM Connecteur I/O Connecteur série RS 232 FPGA Spartan II-300 : 3072 Slices 16 BRAM x 512 octets
27 Complexité de l implantation Image 288 x 352. Analyse des imagettes de taille 40x32 (Pc=4, Pl=2) imagettes Vecteurs extraits de 320 composantes. Nombre de neurones cachés : 15 Système complet Additions Soustractions Divisions Comparaisons 98, , ,
28 5.3. Implantation d un neurone caché FIFO vecteur RAM neurone vecteur appris rayon catégorie ABS( ) + >? CAT 28
29 5.4. Analyses matérielle et temporelle Slices BRAM Spartan II-300 Système complet % (100%) Traitement image 3, x 20ns = 68,4 ms 29
30 Performances Nb. Visages à reconnaître Non reco. Fausses reco. Ident. correctes %
31 6. Troisième implantation 31
32 6.1 : Architecture de la carte 32
33 : Résultats de l implantation Nb. Neurones cachés Extraction Distance Euclidienne Fonction Gaussienne Vitesse de traitement C ,38 ms 197,8 ms 91,3 ms 3,4 images/s C ,18 ms 18,3 ms 30,4 ms 20,4 images/s Le taux de reconnaissance correcte : 95,8%
34 34 7. Conclusion/Perspectives Carte ZISC Carte MEMEC Carte DSP C6201 DSP C64 Vitesse 25 images/s 14 images/s 3,4 images/s 20,4 images/s Performance 85% 92% 95,8% 95,8%
35 7. Conclusion/Perspectives Traitement temps réel démontré. Traitement multi-échelles. Rétine artificielle : réalisation des prétraitements Publications : 1. «Implementation of a RBF neural network on embedded systems: Real time face tracking and identity verification», IEEE Trans. On Neural Networks, Vol.14, No.5, pp , «Localisation et reconnaissance de visages en temps réel avec un réseau de neurones RBF : algorithme et architecture», Revue Traitement du Signal, Vol.20, No.4, pp ,
36 Partie II : Reconnaissance de visages panoramiques en utilisant des multi caméras Fan YANG, Michel PAINDAVOINE GDR-ISIS : 20 Janvier
37 37 Introduction Contexte scientifique Localisation et Reconnaissance de visages =>nombreuses applications Beaucoup de méthodes testées sur visages de faces 2D Mais aucun résultat sur visage panoramique
38 Introduction But du projet Mieux simuler les systèmes biologiques de perception de l homme Étendre le système de traitement à des visages panoramiques Reconnaissance de visages Catégorisation des expressions Reconstruction 3D d un visage 38
39 39 Plan Introduction Système d acquisition Construction de visage panoramique Application : Reconnaissance de visage Résultats expérimentaux Conclusion et perspectives
40 Système d acquisition Banc d acquisition 5 caméras Logitech USB (résolution max. 640x480) Fixées sur une glissière circulaire réglable en hauteur 40
41 Système d acquisition Procédure d acquisition Sujet (Mélanie) placé devant caméra centrale Possède des marqueurs sur le visage qui permettent de récupérer des points communs entre 2 vues du visage 41
42 Système d acquisition Procédure d acquisition Placement des marqueurs Points fiduciaires facilement mémorisables = Points caractéristiques du visage : Yeux, Bouche,Oreilles,.. Au total 10 marqueurs 42
43 43 Construction de visage panoramique Programmes réalisés en MATLAB 3 étapes: Détection de marqueurs Transformation linéaire des images Mosaïquage du visage panoramique
44 Construction de visage panoramique Détection de marqueurs 2 étapes : Filtrage de couleur dans le domaine TLS Calcul des coordonnées des marqueurs 44
45 Construction de visage panoramique Transformation linéaire des images Calcul de la matrice de transformation à l aide des coordonnées des 3 marqueurs communs détectés T = a1 b1 c1 a2 b2 c2 Transformation généralisée à l image x = a1x +b1y +c1 y = a2x +b2y +c2 45
46 46 Construction de visage panoramique Transformation linéaire des images
47 47 Construction de visage panoramique Mosaïquage du visage panoramique
48 48 Construction de visage panoramique Mosaïquage du visage panoramique
49 49 Construction de visage panoramique Mosaïquage du visage panoramique
50 50 Construction de visage panoramique Mosaïquage du visage panoramique
51 51 Construction de visage panoramique Mosaïquage du visage panoramique Image 5 Image 1 Image 4 Image 3 Image 2
52 52 Construction de visage panoramique Mosaïquage du visage panoramique
53 Construction de visage panoramique Construction d une base de visages panoramiques 12 personnes x 4 expressions x 2 sessions = 96 visages panoramiques 53
54 Construction de visage panoramique 54
55 Construction de visage panoramique 55
56 Application : Reconnaissance de visage 56 3 étapes : Prétraitement Apprentissage Test
57 57 Application : Reconnaissance de visage Prétraitement de visages 1. Représentation spatiale
58 Application : Reconnaissance de visage Prétraitement de visages 2. Représentation fréquentielle + Filtrage 58
59 Application : Reconnaissance de visage 59 Processus d apprentissage (ACP*) Xap = P a Q T Projection Normée de Xap sur les vecteurs propres Fap = Q Calcul de la moyenne des projections de Fap pour chaque personne *Turk Pentland : Face recognition using eigenfaces, 1991
60 Application : Reconnaissance de visage 60
61 Application : Reconnaissance de visage 61 Processus de Test (ACP) Ftest= Xtest T.P.a -1 Calcul de la distance euclidienne pour vérifier l identité de la personne
62 Application : Reconnaissance de visage Analyse discriminante (Jackknife) Taux de reconnaissance (1=100%) Nb de vecteurs propres réorganisés en fonction de leur importance pour l identification 62
63 Résultats Expérimentaux Taux moyen de reconnaissance Nombre d exemples p=1 p=2 p=3 p=4 par individu Nombre total d exemples Nombre de tests Représentation 70% 85.08% 90.1% 93.21% spatiale Représentation fréquentielle 76.83% 91.26% 93.25% 97.46% 63
64 64 Conclusion et Perspectives La méthode de prétraitement avec FFT + Filtrage améliore les performances Besoin d améliorations au niveau du mosaïquage Simplifier le système d acquisition : marqueurs virtuels
65 65 Conclusion et Perspectives Tester les deux autres applications : La catégorisation des expressions La reconstruction 3D du visage Publication : «Development of a fast panoramic face mosaicing and recognition system», Revue Optical Engineering, accepté et à paraître en 2005.
Laboratoire 4 Développement d un système intelligent
 DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
un nouvel œil pour l analyse de mouvement
 un nouvel œil pour l analyse de mouvement L entreprise EyeNetics La S.A.R.L. EyeNetics a pour objectif de simplifier l utilisation des systèmes d analyse de mouvement. Dans cette optique nous avons conçu
un nouvel œil pour l analyse de mouvement L entreprise EyeNetics La S.A.R.L. EyeNetics a pour objectif de simplifier l utilisation des systèmes d analyse de mouvement. Dans cette optique nous avons conçu
Limitations of the Playstation 3 for High Performance Cluster Computing
 Introduction Plan Limitations of the Playstation 3 for High Performance Cluster Computing July 2007 Introduction Plan Introduction Intérêts de la PS3 : rapide et puissante bon marché L utiliser pour faire
Introduction Plan Limitations of the Playstation 3 for High Performance Cluster Computing July 2007 Introduction Plan Introduction Intérêts de la PS3 : rapide et puissante bon marché L utiliser pour faire
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Introduction au datamining
 Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Analyse d images. Edmond.Boyer@imag.fr. Edmond Boyer UFRIMA 1
 Analyse d images Edmond.Boyer@imag.fr Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images Edmond.Boyer@imag.fr Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Introduction au Data-Mining
 Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Projet audio. Analyse des Signaux ELE2700
 ÉCOLE POLYTECHNIQUE DE MONTRÉAL Département de Génie Électrique Projet audio Analyse des Signaux ELE2700 Saad Chidami - 2014 Table des matières Objectif du laboratoire... 4 Caractérisation du bruit...
ÉCOLE POLYTECHNIQUE DE MONTRÉAL Département de Génie Électrique Projet audio Analyse des Signaux ELE2700 Saad Chidami - 2014 Table des matières Objectif du laboratoire... 4 Caractérisation du bruit...
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Vérification audiovisuelle de l identité
 Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Intelligence Artificielle et Systèmes Multi-Agents. Badr Benmammar bbm@badr-benmammar.com
 Intelligence Artificielle et Systèmes Multi-Agents Badr Benmammar bbm@badr-benmammar.com Plan La première partie : L intelligence artificielle (IA) Définition de l intelligence artificielle (IA) Domaines
Intelligence Artificielle et Systèmes Multi-Agents Badr Benmammar bbm@badr-benmammar.com Plan La première partie : L intelligence artificielle (IA) Définition de l intelligence artificielle (IA) Domaines
QUESTION 1 {2 points}
 ELE4301 Systèmes logiques II Page 1 de 8 QUESTION 1 {2 points} En se servant de paramètres électriques donnés dans le Tableau 1 ci-dessous, on désire déterminer la fréquence d opération du compteur présenté
ELE4301 Systèmes logiques II Page 1 de 8 QUESTION 1 {2 points} En se servant de paramètres électriques donnés dans le Tableau 1 ci-dessous, on désire déterminer la fréquence d opération du compteur présenté
Structure de base d un ordinateur
 Structure de base d un ordinateur 1-Définition de l ordinateur L ordinateur est un appareil électronique programmable qui traite automatiquement les informations. Il est constitué de l unité centrale et
Structure de base d un ordinateur 1-Définition de l ordinateur L ordinateur est un appareil électronique programmable qui traite automatiquement les informations. Il est constitué de l unité centrale et
Une comparaison de méthodes de discrimination des masses de véhicules automobiles
 p.1/34 Une comparaison de méthodes de discrimination des masses de véhicules automobiles A. Rakotomamonjy, R. Le Riche et D. Gualandris INSA de Rouen / CNRS 1884 et SMS / PSA Enquêtes en clientèle dans
p.1/34 Une comparaison de méthodes de discrimination des masses de véhicules automobiles A. Rakotomamonjy, R. Le Riche et D. Gualandris INSA de Rouen / CNRS 1884 et SMS / PSA Enquêtes en clientèle dans
L utilisation d un réseau de neurones pour optimiser la gestion d un firewall
 L utilisation d un réseau de neurones pour optimiser la gestion d un firewall Réza Assadi et Karim Khattar École Polytechnique de Montréal Le 1 mai 2002 Résumé Les réseaux de neurones sont utilisés dans
L utilisation d un réseau de neurones pour optimiser la gestion d un firewall Réza Assadi et Karim Khattar École Polytechnique de Montréal Le 1 mai 2002 Résumé Les réseaux de neurones sont utilisés dans
Mesure agnostique de la qualité des images.
 Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Introduction au Data-Mining
 Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Master IMA - UMPC Paris 6 RDMM - Année 2009-2010 Fiche de TP
 Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Dan Istrate. Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier
 Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
Leçon 1 : Les principaux composants d un ordinateur
 Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs
 DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
Optimisation de la compression fractale D images basée sur les réseaux de neurones
 Optimisation de la compression fractale D images basée sur les réseaux de neurones D r BOUKELIF Aoued Communication Networks,Architectures and Mutimedia laboratory University of S.B.A aoued@hotmail.com
Optimisation de la compression fractale D images basée sur les réseaux de neurones D r BOUKELIF Aoued Communication Networks,Architectures and Mutimedia laboratory University of S.B.A aoued@hotmail.com
Journées MATHRICE "Dijon-Besançon" DIJON 15-17 mars 2011. Projet MySafeKey Authentification par clé USB
 Journées MATHRICE "Dijon-Besançon" DIJON 15-17 mars 2011 1/23 Projet MySafeKey Authentification par clé USB Sommaire 2/23 Introduction Authentification au Système d'information Problématiques des mots
Journées MATHRICE "Dijon-Besançon" DIJON 15-17 mars 2011 1/23 Projet MySafeKey Authentification par clé USB Sommaire 2/23 Introduction Authentification au Système d'information Problématiques des mots
Temps forts départementaux. Le calcul au cycle 2 Technique opératoire La soustraction
 Temps forts départementaux Le calcul au cycle 2 Technique opératoire La soustraction Calcul au cycle 2 La soustraction fait partie du champ opératoire additif D un point de vue strictement mathématique,
Temps forts départementaux Le calcul au cycle 2 Technique opératoire La soustraction Calcul au cycle 2 La soustraction fait partie du champ opératoire additif D un point de vue strictement mathématique,
Comme chaque ligne de cache a 1024 bits. Le nombre de lignes de cache contenu dans chaque ensemble est:
 Travaux Pratiques 3. IFT 1002/IFT 1005. Structure Interne des Ordinateurs. Département d'informatique et de génie logiciel. Université Laval. Hiver 2012. Prof : Bui Minh Duc. Tous les exercices sont indépendants.
Travaux Pratiques 3. IFT 1002/IFT 1005. Structure Interne des Ordinateurs. Département d'informatique et de génie logiciel. Université Laval. Hiver 2012. Prof : Bui Minh Duc. Tous les exercices sont indépendants.
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
Quoi de neuf en contrôle/commande et systèmes embarqués (RIO, WSN...)?
?") Quoi de neuf en contrôle/commande et systèmes embarqués (RIO, WSN...)? Mathieu PACE National Instruments, Ingénieur d applications L architecture RIO se développe Processeur FPGA E/S E/S E/S personnalisées
Quoi de neuf en contrôle/commande et systèmes embarqués (RIO, WSN...)? Mathieu PACE National Instruments, Ingénieur d applications L architecture RIO se développe Processeur FPGA E/S E/S E/S personnalisées
ETUDE ET IMPLÉMENTATION D UNE CACHE L2 POUR MOBICENTS JSLEE
 Mémoires 2010-2011 www.euranova.eu MÉMOIRES ETUDE ET IMPLÉMENTATION D UNE CACHE L2 POUR MOBICENTS JSLEE Contexte : Aujourd hui la plupart des serveurs d application JEE utilise des niveaux de cache L1
Mémoires 2010-2011 www.euranova.eu MÉMOIRES ETUDE ET IMPLÉMENTATION D UNE CACHE L2 POUR MOBICENTS JSLEE Contexte : Aujourd hui la plupart des serveurs d application JEE utilise des niveaux de cache L1
La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS
 Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Chapitre V : La gestion de la mémoire. Hiérarchie de mémoires Objectifs Méthodes d'allocation Simulation de mémoire virtuelle Le mapping
 Chapitre V : La gestion de la mémoire Hiérarchie de mémoires Objectifs Méthodes d'allocation Simulation de mémoire virtuelle Le mapping Introduction Plusieurs dizaines de processus doivent se partager
Chapitre V : La gestion de la mémoire Hiérarchie de mémoires Objectifs Méthodes d'allocation Simulation de mémoire virtuelle Le mapping Introduction Plusieurs dizaines de processus doivent se partager
VISION PAR ORDINATEUR ET APPRENTISSAGE STATISTIQUE : VERS UN INSTRUMENT DE MUSIQUE IMMATERIEL
 VISION PAR ORDINATEUR ET APPRENTISSAGE STATISTIQUE : VERS UN INSTRUMENT DE MUSIQUE IMMATERIEL 1 Sotiris Manitsaris 2 Tsagaris Apostolos 2 Vassilios Matsoukas 2 Athanasios Manitsaris 1 Centre de Robotique
VISION PAR ORDINATEUR ET APPRENTISSAGE STATISTIQUE : VERS UN INSTRUMENT DE MUSIQUE IMMATERIEL 1 Sotiris Manitsaris 2 Tsagaris Apostolos 2 Vassilios Matsoukas 2 Athanasios Manitsaris 1 Centre de Robotique
F210. Automate de vision hautes fonctionnalités. Caractèristiques. Algorithmes vectoriels
 Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Chapitre 1 : Introduction aux méthodologies de conception et de vérification pour SE
 Chapitre 1 : Introduction aux méthodologies de conception et de vérification pour SE 1. Rappel de ce qu est un SE 2. Conception au niveau système (ESL) Méthodologie de conception (codesign logiciel/matériel)
Chapitre 1 : Introduction aux méthodologies de conception et de vérification pour SE 1. Rappel de ce qu est un SE 2. Conception au niveau système (ESL) Méthodologie de conception (codesign logiciel/matériel)
Représentation des Nombres
 Chapitre 5 Représentation des Nombres 5. Representation des entiers 5.. Principe des représentations en base b Base L entier écrit 344 correspond a 3 mille + 4 cent + dix + 4. Plus généralement a n a n...
Chapitre 5 Représentation des Nombres 5. Representation des entiers 5.. Principe des représentations en base b Base L entier écrit 344 correspond a 3 mille + 4 cent + dix + 4. Plus généralement a n a n...
ÉCOLE POLYTECHNIQUE DE MONTRÉAL. Département de Génie Électrique. La technologie de TEXAS INSTRUMENTS DSP pour le cours Analyse des Signaux ELE2700
 ÉCOLE POLYTECHNIQUE DE MONTRÉAL Département de Génie Électrique La technologie de TEXAS INSTRUMENTS DSP pour le cours Analyse des Signaux ELE2700 M. Corinthios et Zaher Dannawi 29 août 2007 2 Tables des
ÉCOLE POLYTECHNIQUE DE MONTRÉAL Département de Génie Électrique La technologie de TEXAS INSTRUMENTS DSP pour le cours Analyse des Signaux ELE2700 M. Corinthios et Zaher Dannawi 29 août 2007 2 Tables des
intelligence artificielle et cognitique"
 Dialogue on Education, 11h-11h10 Course overview on "Automatisation avancée, intelligence artificielle et cognitique" Prof. Dr. Jean-Daniel Dessimoz, MBA, HES-SO / HEIG-VD 11:00-11:10, 18 November 2014
Dialogue on Education, 11h-11h10 Course overview on "Automatisation avancée, intelligence artificielle et cognitique" Prof. Dr. Jean-Daniel Dessimoz, MBA, HES-SO / HEIG-VD 11:00-11:10, 18 November 2014
CONFERENCE EXPO-PROTECTION
 CONFERENCE EXPO-PROTECTION Agenda Conférence Se conformer à l arrêté du 3 août 2007 : opportunités et menaces Points clés de l arrêté du 3 août 2007 et de la loi 95-73 Bénéfices de la mise en conformité
CONFERENCE EXPO-PROTECTION Agenda Conférence Se conformer à l arrêté du 3 août 2007 : opportunités et menaces Points clés de l arrêté du 3 août 2007 et de la loi 95-73 Bénéfices de la mise en conformité
Interception des signaux issus de communications MIMO
 Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
Déroulement d un projet en DATA MINING, préparation et analyse des données. Walid AYADI
 1 Déroulement d un projet en DATA MINING, préparation et analyse des données Walid AYADI 2 Les étapes d un projet Choix du sujet - Définition des objectifs Inventaire des données existantes Collecte, nettoyage
1 Déroulement d un projet en DATA MINING, préparation et analyse des données Walid AYADI 2 Les étapes d un projet Choix du sujet - Définition des objectifs Inventaire des données existantes Collecte, nettoyage
FAG Detector II le collecteur et l analyseur de données portatif. Information Technique Produit
 FAG II le collecteur et l analyseur de données portatif Information Technique Produit Application La maintenance conditionnelle Principe de fonctionnement Application Le FAG II est, à la fois, un appareil
FAG II le collecteur et l analyseur de données portatif Information Technique Produit Application La maintenance conditionnelle Principe de fonctionnement Application Le FAG II est, à la fois, un appareil
L apprentissage automatique
 L apprentissage automatique L apprentissage automatique L'apprentissage automatique fait référence au développement, à l analyse et à l implémentation de méthodes qui permettent à une machine d évoluer
L apprentissage automatique L apprentissage automatique L'apprentissage automatique fait référence au développement, à l analyse et à l implémentation de méthodes qui permettent à une machine d évoluer
FAG Detector III la solution pour la surveillance et l équilibrage. Information Technique Produit
 FAG Detector III la solution pour la surveillance et l équilibrage Information Technique Produit Principe Utilisation Hautes performances utilisation simple Le FAG Detector III est, à la fois, un appareil
FAG Detector III la solution pour la surveillance et l équilibrage Information Technique Produit Principe Utilisation Hautes performances utilisation simple Le FAG Detector III est, à la fois, un appareil
Introduction à l architecture des ordinateurs. Adrien Lebre Décembre 2007
 Introduction à l architecture des ordinateurs Adrien Lebre Décembre 2007 Plan - partie 1 Vue d ensemble La carte mère Le processeur La mémoire principal Notion de bus Introduction à l architecture des
Introduction à l architecture des ordinateurs Adrien Lebre Décembre 2007 Plan - partie 1 Vue d ensemble La carte mère Le processeur La mémoire principal Notion de bus Introduction à l architecture des
Data Mining. Vincent Augusto 2012-2013. École Nationale Supérieure des Mines de Saint-Étienne. Data Mining. V. Augusto.
 des des Data Mining Vincent Augusto École Nationale Supérieure des Mines de Saint-Étienne 2012-2013 1/65 des des 1 2 des des 3 4 Post-traitement 5 représentation : 6 2/65 des des Définition générale Le
des des Data Mining Vincent Augusto École Nationale Supérieure des Mines de Saint-Étienne 2012-2013 1/65 des des 1 2 des des 3 4 Post-traitement 5 représentation : 6 2/65 des des Définition générale Le
11 Février 2014 Paris nidays.fr. france.ni.com
 11 Février 2014 Paris nidays.fr Construire l enregistreur de données autonome de demain Marc-Junior LARROUY, Ingénieur d Applications, National Instruments France Contenu Introduction à l enregistrement
11 Février 2014 Paris nidays.fr Construire l enregistreur de données autonome de demain Marc-Junior LARROUY, Ingénieur d Applications, National Instruments France Contenu Introduction à l enregistrement
Indicateur. IDé 500. Descriptif indicateur. Schéma/Encombrement
 Indicateur ML IDé 500 Descriptif indicateur Terminal de pesage compatible avec tous les capteurs de pesage analogiques à jauge de contrainte, optimisé pour les capteurs numériques ARPEGE MASTER K. Cet
Indicateur ML IDé 500 Descriptif indicateur Terminal de pesage compatible avec tous les capteurs de pesage analogiques à jauge de contrainte, optimisé pour les capteurs numériques ARPEGE MASTER K. Cet
Les tablettes. Présentation tablettes Descriptif Fournisseurs Caractéristiques Comparatifs Conseils Perspectives Démonstration
 Les Tablettes Les tablettes Présentation tablettes Descriptif Fournisseurs Caractéristiques Comparatifs Conseils Perspectives Démonstration Les tablettes Description: Appareil mobile positionné entre smartphone
Les Tablettes Les tablettes Présentation tablettes Descriptif Fournisseurs Caractéristiques Comparatifs Conseils Perspectives Démonstration Les tablettes Description: Appareil mobile positionné entre smartphone
Apprentissage Automatique
 Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
Introduction à l approche bootstrap
 Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
www.rohos-fr.com Authentification à deux facteurs Cryptage portable gratuit des lecteurs USB Cryptage du disque dur
 Authentification à deux facteurs Cryptage portable gratuit des lecteurs USB Cryptage du disque dur La connexion par reconnaissance faciale L accès sécurisé sous Windows et Mac à l aide d une clé USB www.rohos-fr.com
Authentification à deux facteurs Cryptage portable gratuit des lecteurs USB Cryptage du disque dur La connexion par reconnaissance faciale L accès sécurisé sous Windows et Mac à l aide d une clé USB www.rohos-fr.com
Machines virtuelles Cours 1 : Introduction
 Machines virtuelles Cours 1 : Introduction Pierre Letouzey 1 pierre.letouzey@inria.fr PPS - Université Denis Diderot Paris 7 janvier 2012 1. Merci à Y. Régis-Gianas pour les transparents Qu est-ce qu une
Machines virtuelles Cours 1 : Introduction Pierre Letouzey 1 pierre.letouzey@inria.fr PPS - Université Denis Diderot Paris 7 janvier 2012 1. Merci à Y. Régis-Gianas pour les transparents Qu est-ce qu une
Scanner acoustique NoiseScanner
 Scanner acoustique NoiseScanner «Des yeux et des oreilles pour localiser les sources de bruit...» Scanner acoustique NoiseScanner Décibel d Or 2014 Caractéristiques générales Originalités Fruit de 20 ans
Scanner acoustique NoiseScanner «Des yeux et des oreilles pour localiser les sources de bruit...» Scanner acoustique NoiseScanner Décibel d Or 2014 Caractéristiques générales Originalités Fruit de 20 ans
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Dossier 03 Périphériques d acquisition
 Dossier 03 Périphériques d acquisition I. PERIPHERIQUES D ACQUISITION... 1 II. CARACTERISTIQUES GENERALES... 2 A. CLAVIER... 2 B. SOURIS... 3 C. LECTEUR DE CODES A BARRES (OU CODE-BARRES)... 3 D. SCANNER...
Dossier 03 Périphériques d acquisition I. PERIPHERIQUES D ACQUISITION... 1 II. CARACTERISTIQUES GENERALES... 2 A. CLAVIER... 2 B. SOURIS... 3 C. LECTEUR DE CODES A BARRES (OU CODE-BARRES)... 3 D. SCANNER...
Les datas = le fuel du 21ième sicècle
 Les datas = le fuel du 21ième sicècle D énormes gisements de création de valeurs http://www.your networkmarketin g.com/facebooktwitter-youtubestats-in-realtime-simulation/ Xavier Dalloz Le Plan Définition
Les datas = le fuel du 21ième sicècle D énormes gisements de création de valeurs http://www.your networkmarketin g.com/facebooktwitter-youtubestats-in-realtime-simulation/ Xavier Dalloz Le Plan Définition
Arithmétique binaire. Chapitre. 5.1 Notions. 5.1.1 Bit. 5.1.2 Mot
 Chapitre 5 Arithmétique binaire L es codes sont manipulés au quotidien sans qu on s en rende compte, et leur compréhension est quasi instinctive. Le seul fait de lire fait appel au codage alphabétique,
Chapitre 5 Arithmétique binaire L es codes sont manipulés au quotidien sans qu on s en rende compte, et leur compréhension est quasi instinctive. Le seul fait de lire fait appel au codage alphabétique,
Analyseur de réseaux radio R&S TSMU. Les interférences sources de brouillage fréquentes dans les réseaux radio
 RADIOCOMS MOBILES Systèmes de mesure de couverture 44820/2 Fig. 1 Le R&S TSMU peut reconnaître et analyser automatiquement les interférences co-canal et canaux adjacents dans les réseaux GSM pendant une
RADIOCOMS MOBILES Systèmes de mesure de couverture 44820/2 Fig. 1 Le R&S TSMU peut reconnaître et analyser automatiquement les interférences co-canal et canaux adjacents dans les réseaux GSM pendant une
Spécificités, Applications et Outils
 Spécificités, Applications et Outils Ricco Rakotomalala Université Lumière Lyon 2 Laboratoire ERIC Laboratoire ERIC 1 Ricco Rakotomalala ricco.rakotomalala@univ-lyon2.fr http://chirouble.univ-lyon2.fr/~ricco/data-mining
Spécificités, Applications et Outils Ricco Rakotomalala Université Lumière Lyon 2 Laboratoire ERIC Laboratoire ERIC 1 Ricco Rakotomalala ricco.rakotomalala@univ-lyon2.fr http://chirouble.univ-lyon2.fr/~ricco/data-mining
Champ électromagnétique?
 Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Pierre De Dobbeleer. Spécialiste Project Management, Electronique, Réseaux et télécommunications
 Pierre De Dobbeleer Contact: 11 rue Rogier, 5000 Namur 3éme étage Tel: +32 471 37 64 82 Age: 46 ans Divorcé, 2 enfants Spécialiste Project Management, Electronique, Réseaux et télécommunications Domaines
Pierre De Dobbeleer Contact: 11 rue Rogier, 5000 Namur 3éme étage Tel: +32 471 37 64 82 Age: 46 ans Divorcé, 2 enfants Spécialiste Project Management, Electronique, Réseaux et télécommunications Domaines
UEO11 COURS/TD 1. nombres entiers et réels codés en mémoire centrale. Caractères alphabétiques et caractères spéciaux.
 UEO11 COURS/TD 1 Contenu du semestre Cours et TDs sont intégrés L objectif de ce cours équivalent a 6h de cours, 10h de TD et 8h de TP est le suivant : - initiation à l algorithmique - notions de bases
UEO11 COURS/TD 1 Contenu du semestre Cours et TDs sont intégrés L objectif de ce cours équivalent a 6h de cours, 10h de TD et 8h de TP est le suivant : - initiation à l algorithmique - notions de bases
Présentation BAI -CITC
 Présentation BAI -CITC Expertise reconnue dans des niches technologiques Technologies embarquées Technologies sans contact Technologies d identification et d authentification Sécurité des objets connectés
Présentation BAI -CITC Expertise reconnue dans des niches technologiques Technologies embarquées Technologies sans contact Technologies d identification et d authentification Sécurité des objets connectés
On distingue deux grandes catégories de mémoires : mémoire centrale (appelée également mémoire interne)
") Mémoire - espace destiné a recevoir, conserver et restituer des informations à traiter - tout composant électronique capable de stocker temporairement des données On distingue deux grandes catégories de
Mémoire - espace destiné a recevoir, conserver et restituer des informations à traiter - tout composant électronique capable de stocker temporairement des données On distingue deux grandes catégories de
GROUPE DE TRAVAIL «ARTICLE 29» SUR LA PROTECTION DES DONNÉES
 GROUPE DE TRAVAIL «ARTICLE 29» SUR LA PROTECTION DES DONNÉES 00727/12/FR WP 192 Avis 02/2012 sur la reconnaissance faciale dans le cadre des services en ligne et mobiles Adopté le 22 mars 2012 Le groupe
GROUPE DE TRAVAIL «ARTICLE 29» SUR LA PROTECTION DES DONNÉES 00727/12/FR WP 192 Avis 02/2012 sur la reconnaissance faciale dans le cadre des services en ligne et mobiles Adopté le 22 mars 2012 Le groupe
Introduction à l Informatique licence 1 ère année Notes de Cours
 Introduction à l Informatique licence 1 ère année Notes de Cours Philippe Le Parc Mail : leparc@univ-brest.fr Bureau : LC101 Tel : (029801) 6960 Fiche UE (part.1) 2 Plan et planning Début des cours magistraux
Introduction à l Informatique licence 1 ère année Notes de Cours Philippe Le Parc Mail : leparc@univ-brest.fr Bureau : LC101 Tel : (029801) 6960 Fiche UE (part.1) 2 Plan et planning Début des cours magistraux
AXIS Camera Station Logiciel de gestion vidéo complet pour la surveillance, l enregistrement, la lecture et la gestion d événements
 Station Logiciel de gestion vidéo complet pour la surveillance, l enregistrement, la lecture et la gestion d événements Ne manquez plus aucun détail Des possibilités de gestion vidéo multiples, où que
Station Logiciel de gestion vidéo complet pour la surveillance, l enregistrement, la lecture et la gestion d événements Ne manquez plus aucun détail Des possibilités de gestion vidéo multiples, où que
Conception et Intégration de Systèmes Critiques
 Conception et Intégration de Systèmes Critiques 15 12 18 Non 50 et S initier aux méthodes le développement de projet (plan de développement, intégration, gestion de configuration, agilité) Criticité temporelle
Conception et Intégration de Systèmes Critiques 15 12 18 Non 50 et S initier aux méthodes le développement de projet (plan de développement, intégration, gestion de configuration, agilité) Criticité temporelle
Inventorier, surveiller, localiser vos biens nomades en temps réel. Meylan - France Avril 2012
 Inventorier, surveiller, localiser vos biens nomades en temps réel Meylan - France Avril 2012 LA SOCIETE FIREFLIES RTLS SAS (*) est une société grenobloise qui conçoit, réalise et installe des solutions
Inventorier, surveiller, localiser vos biens nomades en temps réel Meylan - France Avril 2012 LA SOCIETE FIREFLIES RTLS SAS (*) est une société grenobloise qui conçoit, réalise et installe des solutions
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Traitement numérique de l'image. Raphaël Isdant - 2009
 Traitement numérique de l'image 1/ L'IMAGE NUMÉRIQUE : COMPOSITION ET CARACTÉRISTIQUES 1.1 - Le pixel: Une image numérique est constituée d'un ensemble de points appelés pixels (abréviation de PICture
Traitement numérique de l'image 1/ L'IMAGE NUMÉRIQUE : COMPOSITION ET CARACTÉRISTIQUES 1.1 - Le pixel: Une image numérique est constituée d'un ensemble de points appelés pixels (abréviation de PICture
Robot WIFIBOT Lab V4. Lab V4. www.wifibot.com
 Lab V4 Robot WIFIBOT Lab V4 4 roues motrices avec 4 PID indépendants et motorisation sans balais Architecture modulaire et ouverte Contrôlable en RS232 ou en Wifi PC x86 embarqué avec une image Win7 ou
Lab V4 Robot WIFIBOT Lab V4 4 roues motrices avec 4 PID indépendants et motorisation sans balais Architecture modulaire et ouverte Contrôlable en RS232 ou en Wifi PC x86 embarqué avec une image Win7 ou
11 Février 2014 Paris nidays.fr
 11 Février 2014 Paris nidays.fr Télésurveillance des postes d alimentation de la ligne RER A Yohann LEDIEU Département «Systèmes de Conduite et d Essais» NEXEYA SYSTEMS La Couronne (16) Sommaire NEXEYA
11 Février 2014 Paris nidays.fr Télésurveillance des postes d alimentation de la ligne RER A Yohann LEDIEU Département «Systèmes de Conduite et d Essais» NEXEYA SYSTEMS La Couronne (16) Sommaire NEXEYA
K. Ammar, F. Bachoc, JM. Martinez. Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau
 Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
chargement d amplitude variable à partir de mesures Application à l approche fiabiliste de la tolérance aux dommages Modélisation stochastique d un d
 Laboratoire de Mécanique et Ingénieriesnieries EA 3867 - FR TIMS / CNRS 2856 ER MPS Modélisation stochastique d un d chargement d amplitude variable à partir de mesures Application à l approche fiabiliste
Laboratoire de Mécanique et Ingénieriesnieries EA 3867 - FR TIMS / CNRS 2856 ER MPS Modélisation stochastique d un d chargement d amplitude variable à partir de mesures Application à l approche fiabiliste
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE
 Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy laurent@clermont.in2p3.fr http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Simulation d'un examen anthropomorphique en imagerie TEMP à l iode 131 par simulation Monte Carlo GATE LAURENT Rémy laurent@clermont.in2p3.fr http://clrpcsv.in2p3.fr Journées des LARD Septembre 2007 M2R
Détection des deux roues motorisés par télémétrie laser à balayage
 MEsure du TRAfic des deux-roues MOTOrisés pour la sécurité et l évaluation des risques Détection des deux roues motorisés par télémétrie laser à balayage Séminaire de mi parcours 11 mai 2012 CETE Normandie
MEsure du TRAfic des deux-roues MOTOrisés pour la sécurité et l évaluation des risques Détection des deux roues motorisés par télémétrie laser à balayage Séminaire de mi parcours 11 mai 2012 CETE Normandie
Organisation du parcours M2 IR Les unités d enseignements (UE) affichées dans la partie tronc commun sont toutes obligatoires, ainsi que le stage et
 affichées dans la partie tronc commun sont toutes obligatoires, ainsi que le stage et") Organisation du parcours M2 IR Les unités d enseignements (UE) affichées dans la partie tronc commun sont toutes obligatoires, ainsi que le stage et l'anglais. L'étudiant a le choix entre deux filières
Organisation du parcours M2 IR Les unités d enseignements (UE) affichées dans la partie tronc commun sont toutes obligatoires, ainsi que le stage et l'anglais. L'étudiant a le choix entre deux filières
APPLICATION DE RESEAUX DE NEURONES ARTIFICIELS A LA RECONNAISSANCE AUTOMATIQUE DE CARACTERES MANUSCRITS
 Faculté Polytechnique de Mons Dissertation originale présentée pour l obtention du grade de Docteur en Sciences Appliquées par Bernard GOSSELIN APPLICATION DE RESEAUX DE NEURONES ARTIFICIELS A LA RECONNAISSANCE
Faculté Polytechnique de Mons Dissertation originale présentée pour l obtention du grade de Docteur en Sciences Appliquées par Bernard GOSSELIN APPLICATION DE RESEAUX DE NEURONES ARTIFICIELS A LA RECONNAISSANCE
Introduction à MATLAB R
 Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
Notions d IPMI et retour. Ecole d électronique numérique Fréjus 28 novembre 2012 Nicolas LETENDRE
 Notions d IPMI et retour d experience du LAPP Ecole d électronique numérique Fréjus 28 novembre 2012 Nicolas LETENDRE L IPMI (Intelligent Platform Management Interface) Définition d Interfaces de bas niveau
Notions d IPMI et retour d experience du LAPP Ecole d électronique numérique Fréjus 28 novembre 2012 Nicolas LETENDRE L IPMI (Intelligent Platform Management Interface) Définition d Interfaces de bas niveau
Statistiques Descriptives à une dimension
 I. Introduction et Définitions 1. Introduction La statistique est une science qui a pour objectif de recueillir et de traiter les informations, souvent en très grand nombre. Elle regroupe l ensemble des
I. Introduction et Définitions 1. Introduction La statistique est une science qui a pour objectif de recueillir et de traiter les informations, souvent en très grand nombre. Elle regroupe l ensemble des
Intérêt du découpage en sous-bandes pour l analyse spectrale
 Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Reconnaissance de gestes : approches 2D & 3D
 Reconnaissance de gestes : approches 2D & 3D Maher Mkhinini et Patrick Horain Institut Mines-Télécom/Télécom SudParis Département Électronique et Physique, 9 rue Charles Fourier, 91011 Evry, France Email
Reconnaissance de gestes : approches 2D & 3D Maher Mkhinini et Patrick Horain Institut Mines-Télécom/Télécom SudParis Département Électronique et Physique, 9 rue Charles Fourier, 91011 Evry, France Email
Mise en œuvre d une infrastructure de virtualisation au CNRGV
 Mise en œuvre d une infrastructure de virtualisation au CNRGV Pourquoi la virtualisation? Choix de la solution Mise en œuvre Avantages, inconvénients, perspectives Pour aller plus loin 26/03/2013 AG CATI
Mise en œuvre d une infrastructure de virtualisation au CNRGV Pourquoi la virtualisation? Choix de la solution Mise en œuvre Avantages, inconvénients, perspectives Pour aller plus loin 26/03/2013 AG CATI
Relever les défis des véhicules autonomes
 EMM 2014 12eme rencontre européenne de mécatronique Relever les défis des véhicules autonomes Mathias Perrollaz Ingénieur expert Inria Christian Laugier Directeur de recherche Inria E-Motion Team Annecy,
EMM 2014 12eme rencontre européenne de mécatronique Relever les défis des véhicules autonomes Mathias Perrollaz Ingénieur expert Inria Christian Laugier Directeur de recherche Inria E-Motion Team Annecy,
Intelligence artificielle et les défis en robotique mobile et autonome
 Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
La visio-conférence holographique : Pourquoi? Comment?
 La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
µrv : Realité Virtuelle
 µrv : Realité Virtuelle Edgar-Fernando ARRIAGA-GARCIA Charles-Henri BABIAUD Clément GRELLIER Quentin PETIT Jérôme Ricoeur Florent VIOLLEAU INSA Rennes 21 septembre 2011 1 / 15 Objectifs pour cette semaine
µrv : Realité Virtuelle Edgar-Fernando ARRIAGA-GARCIA Charles-Henri BABIAUD Clément GRELLIER Quentin PETIT Jérôme Ricoeur Florent VIOLLEAU INSA Rennes 21 septembre 2011 1 / 15 Objectifs pour cette semaine
Robot WIFIBOT Lab V3. 4 roues motrices
 4 roues motrices Lab V3 Robot WIFIBOT Lab V3 Architecture modulaire et ouverte Contrôlable en RS232 ou en Wifi PC x86 embarqué avec une image Xpe ou Linux Ubuntu Le Wifibot Lab est une plate forme robotique
4 roues motrices Lab V3 Robot WIFIBOT Lab V3 Architecture modulaire et ouverte Contrôlable en RS232 ou en Wifi PC x86 embarqué avec une image Xpe ou Linux Ubuntu Le Wifibot Lab est une plate forme robotique
Optimisation, traitement d image et éclipse de Soleil
 Kléber, PCSI1&3 014-015 I. Introduction 1/8 Optimisation, traitement d image et éclipse de Soleil Partie I Introduction Le 0 mars 015 a eu lieu en France une éclipse partielle de Soleil qu il était particulièrement
Kléber, PCSI1&3 014-015 I. Introduction 1/8 Optimisation, traitement d image et éclipse de Soleil Partie I Introduction Le 0 mars 015 a eu lieu en France une éclipse partielle de Soleil qu il était particulièrement
Correction de l examen de la première session
 de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
de l examen de la première session Julian Tugaut, Franck Licini, Didier Vincent Si vous trouvez des erreurs de Français ou de mathématiques ou bien si vous avez des questions et/ou des suggestions, envoyez-moi
1 Complément sur la projection du nuage des individus
 TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
Perspectives pour l entreprise. Desktop Cloud. JC Devos IBM IT Architect jdevos@fr.ibm.com. 2010 IBM Corporation
 Perspectives pour l entreprise Desktop Cloud JC Devos IBM IT Architect jdevos@fr.ibm.com Principe technique Disposer d un poste de travail virtuel accessible par la plupart des terminaux disponibles Ce
Perspectives pour l entreprise Desktop Cloud JC Devos IBM IT Architect jdevos@fr.ibm.com Principe technique Disposer d un poste de travail virtuel accessible par la plupart des terminaux disponibles Ce