CONCEPTION DES ENGRENAGES Partim 1: Géométrie et Cinématique
|
|
|
- Pauline Marchand
- il y a 6 ans
- Total affichages :
Transcription
1 CONCEPTION DES ENGRENAGES Partim 1: Géométrie et Cinématique Pierre Duysinx Aérospatiale & Mécanique Année académique
2 LAY-OUT Introduction Types d engrenage Engrenages à dentures droites Cinématique Géométrie Calcul des forces Dessin Engranges à dentures hélicoïdales Cinématique Géométrie Calcul des forces 2

3 INTRODUCTION 3

4 DÉFINITIONS On appelle roues dentées des corps de révolution pourvus de dents par le contact desquelles un mouvement de rotation peut être transmis d un arbre moteur vers un arbre récepteur. L engrènement d une roue dentée avec une crémaillère transforme la rotation de la roue en un déplacement de translation de la crémaillère et vice-versa. 4



5 HISTORIQUE DES ENGRENAGES Chine ancienne: South Pointing Chariot permet de voyager à travers le désert de Gobi contient des engrenages Chez les Romains, Vitruve imagine le principe des engrenages à peigne Moyen-Age: les systèmes de roues dentées en forme de peigne avec des dents en bois transmettent le mouvement des moulins. 5




6 HISTORIQUE DES ENGRENAGES A la Renaissance, Léonard de Vinci dessine de nombreux engrenages et s intéresse à l engrènement homocinétique L horlogerie développe la technique des engrenages Ere industrielle: la fabrication des engrenages en acier et en grande série 6
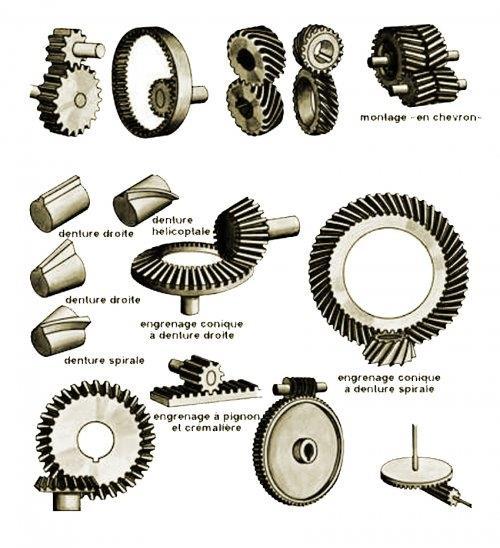
7 TYPES D ENGRENAGES 7
8 AVANTAGES DES ENGRENAGES Transmission des plus petites aux plus grandes machines Rapport constant des vitesses quelle que soit la charge Disposition quelconque des axes des roues, même si les axes parallèles sont la meilleure solution Sécurité de service et durée de vie élevée Entretien restreint (graissage) Compacité et encombrement faible 8
9 DÉSAVANTAGES DES ENGRENAGES Prix de revient relativement élevé (par rapport à d autres solutions) Niveau sonore parfois gênant (dépend du type d engrenages) Transmission rigide entre les arbres Amortissement peu efficace des à-coups et des vibrations Interchangeabilité limitée (même module nécessaire) 9



10 OBJECT DE LA LEÇON Les engrenages constituent une vaste famille d éléments de machine utilisés en transmission de puissance Ils sont utilisés pour transmettre et convertir le couple et la vitesse dans une grande variété d applications 10
11 OBJECT DE LA LEÇON Introduction: découvrir les différents types d engrenages et leur applications Engrenages à dentures droites: le type le plus simple d engrenages: axes parallèles et dentures droites et hélicoïdales. Autres types d engrenages: coniques, à axes gauches, vis sans fin cours avancés Les engrenages sont un des éléments de machines les plus courants: Nécessité de connaître et de comprendre les bases de la théorie des engrenages 11
12 OBJET DE LA LEÇON Les engrenages sont hautement standardisés AGMA: American Gear Manufacturer Association ISO: International Standards Organisation Règles et normes de Conception & Dimensionnement Fabrication Choix des matériaux 12
13 TYPES D ENGRENAGES 13

14 TYPES D ENGRENAGES 14
15 TYPES D ENGRENAGE Engrenages à axes parallèles: les surfaces primitives sont des cylindres qui roulent sans glisser l un sur l autre Engrenages à axes concourants: les surfaces primitives sont des troncs de cône qui roulent sans glisser l un sur l autre 15
16 TYPES D ENGRENAGE Engrenages à axes gauches: les axes des roues sont gauches c.-à-d. ni concourants ni parallèles. Les surfaces primitives théoriquement des hyperboloïdes roulent et glissent l une sur l autre. Les surfaces utilisées pratiquement sont des cylindres, des troncs de cônes, ou des tores. 16
17 VOCABULAIRE On convient d'appeler: Pignon: La plus petite des roues dentées. Elle est indicée 1. Roue: La roue dentée de diamètre maximale. Elle est repérée par l'indice 2. Il s'agit d'une roue à denture extérieure. Couronne: Une roue à denture intérieure. Elle est également repérée par l'indice 2. Crémaillère : Un profil denté continu et plan. 17

18 SCHEMATISATION DES ENGRENAGES 18
19 ENGRENAGE A DENTURES DROITES 19

20 ENGRENAGES A DENTURES DROITES 20
21 RAPPORT DE REDUCTION Deux roues dentées en prise se comportent comme deux cylindres de diamètres d 01 et d 02 roulant l un sur l autre Si il n y a pas de glissement, on peut écrire Soit le rapport de réduction i 21
22 RAPPORT DE REDUCTION Un engrènement extérieur donne lieu à une inversion du sens de rotation alors qu un engrènement sur une denture intérieure (comme pour les poulies et les chaînes) préserve le sens de rotation On devrait dès lors écrire Le signe «+» étant pour les dentures intérieures et le signe «-» pour les dentures extérieures 22
23 RAPPORT DE REDUCTION L égalité des puissances entrantes et sortantes (au rendement organique près) Donne le facteur d amplification du couple 23
24 ENTRE AXE L entre axe a 0 Les formules sont valables pour un engrènement à denture intérieure pour autant que l on affecte un signe «-» aux grandeurs Z 2, i, a 0. 24
25 PAS PRIMITIF Le pas primitif p des roues cylindriques à denture droite est la longueur de l arc mesuré sur le cercle primitif entre deux points correspondants à deux flancs correspondants (droits ou gauches). 25
26 MODULE METRIQUE Soit Z 1 et Z 2 les nombres entiers de dents du pignon 1 et de la roue 2: Le pas primitif doit être le même sur les deux roues Le module métrique (en mm) est le rapport 26
27 MODULE METRIQUE Le module métrique m est très commode pour le calcul. Le module métrique est à la base de la normalisation des engrenages en Europe continentale 27
28 MODULE METRIQUE Les diamètres primitifs des roues cylindriques à dentures droites sont calculés par les relations Il vient aussi que le rapport de réduction s écrit aussi Et l entre-axe: 28
29 DIAMETRE DE PITCH Dans les pays anglo-saxons, on utilise les mesures anglaises. On utilise le diametral pitch ou pas diamétral Pd Soit encore En incluant le module métrique m: 29
30 CINEMATIQUE DE L ENGRENAGE 30
31 FORME DE LA DENT Pour avoir un rapport de réduction constant avec le temps, il faut que les dents possèdent un profil particulier, conjugué l un part rapport à l autre. Par exemple les dents en forme de peigne donnent lieu à des fluctuations de la vitesse instantanée. Ce n est donc pas un bon profil. 31
32 CINEMATIQUE DE L ENGRENEMENT Pour que l on ait une paire engrenages, il faut que la transformation soit homocinétique: 1/ Il faut que le rapport des vitesses angulaires soit constant et égal au rapport d engrenage ou encore des diamètres 2/ Le contact entre les dents successives ne doit pas subir d interruption 32
33 CINEMATIQUE DE L ENGRENEMENT Soient deux roues dentées de cercles primitifs d 01 et d 02 en contact au point C. Pour qu il y ait transmission du mouvement du pignon 1 à la roue 2, les profils des dents doivent rester constamment en contact. Supposons pour simplifier que les roues 1 et 2 soient remplacées par les deux leviers centrées en O 1 et O 2. 33
34 CINEMATIQUE DE L ENGRENEMENT Dans une position quelconque, par exemple au point de contact A, les vitesses selon la normale commune doivent être identiques. Si le profil 1 est déplacé de la distance dl 1 dans la direction de la normale, le profil 2 se déplace de la même valeur : Pendant l intervalle de temps dt, les deux roues doivent tourner chacune des angles élémentaires dϕ 1 et dϕ 2. 34
35 CINEMATIQUE DE L ENGRENEMENT On peut écrire Il vient Pour que le rapport des vitesses angulaires ω 1 /ω 2 reste constant quelle que soit la position du point de contact, il faut que le rapport r 2 /r 1 le reste aussi. 35
36 CINEMATIQUE DE L ENGRENEMENT La similitude entre les triangles O 1 CD et O 2 BC permet d écrire Etant donné que Il vient La normale commune en tout point de contact de deux profils quelconques doit passer par le même point central commun aux deux profils de fonctionnement. 36
37 CINEMATIQUE DE L ENGRENEMENT Loi des engrenages: La normale commune en tout point de contact de deux profils quelconques doit passer par le même point central commun aux deux profils de fonctionnement. Si l un des profils des dents est fixé, alors le profil de l autre roue dentée est déterminé par la loi. Ce deuxième profil se nomme le profil conjugué. 37
38 CINEMATIQUE DE L ENGRENEMENT Il existe une infinité de profils conjugués qui conviennent et vérifient la loi. Même s il y a un nombre infini de profils conjugués de dents, seuls un petit nombre a donné lieu à des applications pratiques. Les plus connues sont les profils en forme de cycloïde utilisés en horlogerie et les profils en développante de cercle (odontoïde) qui sont utilisés en transmission de puissance. 38
39 DENT EN DEVELOPPANTE DE CERCLE On appelle développante de cercle la courbe décrite par un point d une droite (ou une corde) qui roule sans glisser sur la circonférence d un cercle. La circonférence porte le nom de cercle de base. 39
40 DENT EN CYCLOIDE Les dentures cycloïdales ne sont plus utilisées dans les machines, car les difficultés de fabrication et de contrôle sont grandes. Le rendement mécanique et les conditions de contact sont meilleurs qu entre les profils de dents en développante de cercle. Par contre les profils cycloïdaux imposent un entraxe et des cercles générateurs de rayons ρ 1 et ρ 2 égaux sur les deux roues. 40
41 DENT EN DEVELOPPANTE DE CERCLE EQUATION DE L ODONTOÏDE: La corde roule sans glisser. La longueur de l arc est celle de la corde En outre 41
42 DENT EN DEVELOPPANTE DE CERCLE Méthode numérique pour calculer la développante de cercle 1/ A un angle f correspond un angle a: 2/ A un angle a correspond un rayon r: 3/ La zone retenue sera limitée par le pied et la tête de dent 42
43 PROPRIÉTÉS DE LA DÉVELOPPANTE La tangente à la développante ne coupe pas le profil de la dent La normale à la développante est toujours tangente au cercle de base Le rayon de courbure r en un point quelconque de la développante a son centre sur le cercle de base Deux développantes de cercle de base sont équidistantes en tout point (distance mesurée sur le cercle de base) L angle a est appelé angle de pression ou angle d incidence: il varie en tout point de la développante 43
44 GEOMETRIE DE L ENGRENAGE 44
45 DIMENSIONS On exprime les dimensions de la dent en fonction du module m 45
46 DIMENSIONS s l épaisseur au niveau du diamètre primitif = e largeur du creux correspondant entre deux dents (sinon l engrènement n est pas possible) Addendum h a hauteur de la dent normale mesurée par rapport au cercle primitif (saillie) Dédendum h f : profondeur du creux entre dents normales, mesurées par rapport au cercle primitif 46
47 DIMENSIONS 47
48 FORCE ET ANGLE DE PRESSION L examen du profil de deux roues en contact montre que les points de contact sont toujours situés sur une droite, la ligne d action, inclinée par rapport à la tangente commune aux cylindres primitifs. 48

49 FORCE ET ANGLE DE PRESSION Dans les dentures en développante de cercle, la normale commune aux deux dentures est aussi la tangente aux deux cercles de base. La normale commune est la ligne d action de la force de contact. La normale commune passe par le point de contact (pitch point) des deux cercles primitifs quel que soit le point où le contact physique a lieu. Au point de contact (virtuel), les deux pinions ont la même vitesse appelée vitesse au cercle primitif. L angle entre la ligne d action de la force de contact et le vecteur vitesse, tangent au cercle primitif est appelé angle de pression 49
50 FORCE ET ANGLE DE PRESSION 50
, 20 (le plus courant),")
51 FORCE ET ANGLE DE PRESSION Les angles de pression a 0 sont normalisés et peuvent prendre un petit nombre de valeurs: 14,5 (rare), 20 (le plus courant), 25 51
52 FORCE ET ANGLE DE PRESSION L angle de pression permet encore d écrire la relation entre le rayon du cercle primitif et le rayon du cercle de base: 52
53 FORCE ET ANGLE DE PRESSION L existence de l angle de pression a 0 entraîne l apparition de forces radiales et tangentielles dont la composition vectorielle donne F n réellement transmise de dent à dent. 53

54 FORCE ET ANGLE DE PRESSION L existence de l angle de pression a 0 entraîne l apparition de forces radiales F r et tangentielles F t dont la composition donne la force de pression transmise de dent à dent En réalité c est la force tangentielle qui est donnée car elle est calculée par la puissance transmise Et puis on calcule la force radiale 54
55 DEPORT DE DENTURE Le déport de denture consiste à modifier l entre axe en maintenant les cercles de base identiques Soit d l accroissement d entre axe Les diamètres primitifs et les angles de pression s en trouvent modifiés. L angle de pression est augmenté avec l entre axe 55
56 DEPORT DE DENTURE A couple constant, l augmentation de l angle de pression a entraîne une diminution de F t mais surtout une augmentation de F r 56
57 INTERFERENCE DE DENTURE L interférence de denture survient lorsqu on a contact entre la tête de la dent et la dent antagoniste en un point situé à l intérieur du cercle de base Etant donné que la distance h qui sépare le point de tangence des cercles primitifs est plus grand du côté pignon, l interférence survient en premier lieu sur la petite roue. 57
58 INTERFERENCE DE DENTURE Lors de l engrènement, le contact entre dentures suit la ligne d action (E 1 E 2 ) tangente commune aux cercles de base, inclinée de l angle de pression (a) par rapport à la tangente commune aux deux cercles primitifs qui sont en contact au point G. Lorsque le nombre de dents du pignon devient faible, on s aperçoit que le cercle de tête de la roue sort de la ligne d action. Il se produit alors une interférence d engrènement. 58
59 INTERFERENCE DE DENTURE Exprimons la condition pour ne pas avoir de contact en dehors de la ligne d action E 1 E 2 : Calculons cette condition 59
60 INTERFERENCE DE DENTURE Il vient La condition s écrit En introduisant le rapport de réduction i=d 02 /d 01, le module m=d o1 /Z 1, on trouve 60
61 INTERFERENCE DE DENTURE Après un peu d algèbre, il vient Il s'en suit qu'à une valeur de i correspond une valeur de Z 1, nombre de dents en dessous duquel on a interférence de denture. Pour les dimensions normalisées de la dent et un angle de pression a=20, 61
62 INTERFERENCE DE DENTURE A côté de l'interférence de denture qui survient lors de l'engrènement des roues dentées, on peut avoir également interférence lors de la génération et de la taille de l'engrenage par une crémaillère. On parle alors d'interférence de taille. 62
63 INTERFERENCE DE DENTURE La crémaillère correspond à un cercle de rayon infini et donc aussi d'un nombre infini de dents. En pratique on va jusque 14 dents (interférence limitée) 63
64 INTERFERENCE DE DENTURE Ce phénomène dépend de l angle de pression (a). Pour un angle de 20, l interférence de taille apparaît lorsque le pignon a moins de 17 dents et la roue plus de 17 ou lorsque le pignon a moins de 13 dents quelque soit le nombre de dents de la roue. La solution consiste à ramener le point M à l intérieur de la zone de contact E 1 E 2. Ceci peut-être fait en déportant les dentures par rapport aux cercles primitifs. Pour une correction sans variation de l entraxe O 1 O 2, il est nécessaire de déporter les deux dentures en sens inverses: Vers l extérieur pour le pignon Vers l intérieur pour la roue 64
65 INTERFERENCE DE DENTURE Lorsque le déport devient trop important, on aboutit à des formes de dentures qui peuvent présenter dans le cas du pignon des zones de fragilité ou amorces de rupture. Il faut dans ce cas utiliser un déport de denture avec variation de l entraxe ou bien faire appel à des dentures spéciales ne respectant pas le profil en développante de cercle. 65
66 LONGUEUR DE CONTACT Les points de début et de fin de contact entre les dents définissent l engrènement de la roue et du pignon. Soient E 1 : interaction du cercle de tête (addendum) d a1 avec ligne de pression E 2 : interaction du cercle de tête d a2 avec ligne de pression La longueur E 1 E 2 mesurée le long de la ligne d action entre ces deux points est appelée longueur de conduite 66
67 LONGUEUR DE CONTACT Le recouvrement e a = E 1 E 2 se mesure sur la tangente commune aux circonférence de base Le rapport de conduite est le rapport de la longueur de conduite E 1 E 2 au pas de base p b Le pas de base p b est la distance qui sépare deux profils homologue sur une tangente au cercle de base 67
68 LONGUEUR DE CONTACT Pas de base Le rapport de conduite s écrit Pour avoir continuité de l engrènement, on doit avoir Pour éviter les chocs on doit avoir e a > 1,25. Situation idéale e a > 2 68
69 LONGUEUR DE CONTACT Calcul du recouvrement On remarque que 69
70 LONGUEUR DE CONTACT Calcul du recouvrement (suite) Soit la longueur de conduite Le recouvrement 70
71 LONGUEUR DE CONTACT Utilisons les grandeurs suivantes Il vient En simplifiant Dans le cas d une denture intérieure, on met un signe «-» devant la seconde racine carrée 71
, ce qui engendre du bruit et des vibrations.")
72 JEU D ENTRE DENTS Durant l engrènement, les dents en prise fléchissent, et de plus leur nombre varie (2 3), ce qui engendre du bruit et des vibrations. 72
73 COTATION, MATERIAUX, DISPOSITIONS CONSTRUCTIVES 73

74 COTATION D UNE ROUE DENTEE Sur le dessin ci-contre figurent les cotes devant figurer sur le dessin de définition de la roue. Le diamètre primitif est en cote encadrée car il s agit d une valeur théorique non mesurable. Doit également figurer sur le dessin de définition un tableau indiquant les principales caractéristiques de la denture comme sur l exemple ci-contre. 74


75 DISPOSITION CONSTRUCTIVE Pignon arbré pour denture de petites dimensions Roue avec rainure de clavette pour taille moyenne 75

76 DISPOSITION CONSTRUCTIVE Roue à bras moulée ou couronne rapportée pour roues dentées de grandes dimensions 76
 Des roues rapportées permettent de réduire l encombrement axial.")
77 DISPOSITION CONSTRUCTIVE Pour les trains d engrenages, prévoir un dégagement d outil (x) Des roues rapportées permettent de réduire l encombrement axial. 77
78 MATERIAUX UTILISES Fonte à graphite sphéroïdal FGS : Roues de grandes dimensions. Aciers ordinaires type XC : Engrenages peu chargés. Aciers au nickel-chrome (10 NC 12) : Engrenages fortement chargés. Matières plastiques : Nylon, Téflon. 78

79 DENTURE HELICOÏDALE 79
.")
80 DENTURE HELICOIDALE Roues dentées dans lesquelles le profil des dents suit une hélicoïde. La roue est cylindrique. Les dents sont inclinées d un angle b par rapport à l axe de rotation (8 <b<20 ). Les deux roues à dentures hélicoïdales doivent avoir leurs hélices de sens opposés pour s engrener ensembles. 80

81 DENTURE HELICOIDALE 81

82 DENTURE HELICOIDALE La taille d une roue dentée est réalisée par le moyen d un outil crémaillère ou de son équivalent (Hobb) décalée d un angle b par rapport à la génératrice. L enlèvement des copeaux est obtenus par un mouvement de va et vient de la crémaillère, le mouvement d avance étant synchronisé avec le mouvement de rotation de la roue 82
83 DENTURE HELICOIDALE AVANTAGES (par rapport aux dentures droites) Toujours plusieurs dents en prise Régularité de la transmission à haute vitesse Moins d usure et niveau sonore plus bas: choc dû à la flexion des dents moindre Possibilité de façon précise d obtenir des entraxes de dimension souhaitée en modifiant l angle d hélice Possibilité de transmettre un mouvement entre deux axes orthogonaux non concourants 83

84 DENTURE HELICOIDALE INCONVENIENT Plus chère que la denture droite Création d une composante axiale de l effort de contact Impose souvent la mise en place dans les paliers de roulements spécifiques capables de reprendre ce type d effort Solution possible: inverser le sens de l hélice sur deux roues dentées portées par le même arbre, roues dentées en chevron. 84

85 DENTURE HELICOIDALE INCONVENIENT Les dentures sur les arbres intermédiaires doivent être inclinées dans le même sens pour que les efforts axiaux se compensent (dirigés en sens inverses). 85
86 DENTURE HELICOIDALE: Les profils sont toujours en développante de cercle mais l axe des dents est incliné d un angle b par rapport à l axe principal du cylindre primitif On définit : le profil réel contenu dans le plan perpendiculaire à l axe des dents Le profil apparent contenu dans le plan perpendiculaire à l axe du cylindre 86
87 MODULE ET PAS APPARENT Module apparent dans le plan du cylindre Pas axial de la denture 87
88 MODULE ET PAS APPARENT Le module réel est celui qui est lié au pas réel. Il est normalisé et est donné par celui de la crémaillère Le pas apparent s en déduit L entre axe 88
89 ANGLE DE PRESSION L angle de pression qui correspond à l inclinaison du profil trapézoïdal de la crémaillère n est pas le même dans le plan normal à la denture que dans le plan moyen de la roue. On peut montrer que l angle de pression est normalisé dans le plan normal à la denture et que dans le plan apparent on a: 89
90 CALCUL DES FORCES SUR LA DENTURE Force tangentielle dans le plan apparent donné par la puissance et la vitesse de rotation La force normale à la denture dans le plan réel 90
91 CALCUL DES FORCES SUR LA DENTURE Quant à la composante axiale Et la composante radiale 91
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
CALIBRES OMEGA CO-AXIAL DESCRIPTION ECHAPPEMENT CO-AXIAL REGLAGE OMEGA
 CALIBRES OMEGA CO-AXIAL DESCRIPTION ECHAPPEMENT CO-AXIAL REGLAGE OMEGA Table des matières Page Lexique 3 Description de l échappement Co-Axial 5 Fonctions de l échappement Co-Axial 6 Avantages de l échappement
CALIBRES OMEGA CO-AXIAL DESCRIPTION ECHAPPEMENT CO-AXIAL REGLAGE OMEGA Table des matières Page Lexique 3 Description de l échappement Co-Axial 5 Fonctions de l échappement Co-Axial 6 Avantages de l échappement
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Résonance Magnétique Nucléaire : RMN
 21 Résonance Magnétique Nucléaire : RMN Salle de TP de Génie Analytique Ce document résume les principaux aspects de la RMN nécessaires à la réalisation des TP de Génie Analytique de 2ème année d IUT de
21 Résonance Magnétique Nucléaire : RMN Salle de TP de Génie Analytique Ce document résume les principaux aspects de la RMN nécessaires à la réalisation des TP de Génie Analytique de 2ème année d IUT de
Cercle trigonométrique et mesures d angles
 Cercle trigonométrique et mesures d angles I) Le cercle trigonométrique Définition : Le cercle trigonométrique de centre O est un cercle qui a pour rayon 1 et qui est muni d un sens direct : le sens inverse
Cercle trigonométrique et mesures d angles I) Le cercle trigonométrique Définition : Le cercle trigonométrique de centre O est un cercle qui a pour rayon 1 et qui est muni d un sens direct : le sens inverse
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Calcul matriciel. Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.
 est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes.") 1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
1 Définitions, notations Calcul matriciel Définition 1 Une matrice de format (m,n) est un tableau rectangulaire de mn éléments, rangés en m lignes et n colonnes. On utilise aussi la notation m n pour le
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
XXXX F16D ACCOUPLEMENTS POUR LA TRANSMISSION DES MOUVEMENTS DE ROTATION; EMBRAYAGES; FREINS [2]
![XXXX F16D ACCOUPLEMENTS POUR LA TRANSMISSION DES MOUVEMENTS DE ROTATION; EMBRAYAGES; FREINS [2]](/thumbs/20/579952.jpg "XXXX F16D ACCOUPLEMENTS POUR LA TRANSMISSION DES MOUVEMENTS DE ROTATION; EMBRAYAGES; FREINS [2]") XXXX F16D F16D F16 ÉLÉMENTS OU ENSEMBLES DE TECHNOLOGIE; MESURES GÉNÉRALES POUR ASSURER LE BON FONCTIONNEMENT DES MACHINES OU INSTALLATIONS; ISOLATION THERMIQUE EN GÉNÉRAL F16D XXXX F16D ACCOUPLEMENTS
XXXX F16D F16D F16 ÉLÉMENTS OU ENSEMBLES DE TECHNOLOGIE; MESURES GÉNÉRALES POUR ASSURER LE BON FONCTIONNEMENT DES MACHINES OU INSTALLATIONS; ISOLATION THERMIQUE EN GÉNÉRAL F16D XXXX F16D ACCOUPLEMENTS
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
L entreprise Page 4. Technique des engrenages Page 10. Engrenages à vis sans fin Page 14. Motoréducteurs à arbre creux Compacta Page 34
 Sommaire L entreprise Framo Morat : votre partenaire dans le domaine des solutions d entraînement sur mesure. Nous offrons une vaste gamme de produits pour un large spectre d applications dans les secteurs
Sommaire L entreprise Framo Morat : votre partenaire dans le domaine des solutions d entraînement sur mesure. Nous offrons une vaste gamme de produits pour un large spectre d applications dans les secteurs
OTIS. Mod. La modernisation réinventée. Plus de sécurité Plus de fiabilité Plus de confort. Et plus d attention à l environnement.
 OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : laurent.moulin@renaultvi.com D epuis 1974 à aujourd hui, la réglementation
Mesure d angles et trigonométrie
 Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
LES ESCALIERS. Les mots de l escalier
 Les mots de l escalier L escalier :ouvrage constitué d une suite régulière de plans horizontaux (marches et paliers) permettant, dans une construction, de passer à pied d un étage à un autre. L emmarchement
Les mots de l escalier L escalier :ouvrage constitué d une suite régulière de plans horizontaux (marches et paliers) permettant, dans une construction, de passer à pied d un étage à un autre. L emmarchement
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
COLLOQUE NATIONAL de la PERFORMANCE INDUSTRIELLE
 COLLOQUE NATIONAL de la PERFORMANCE INDUSTRIELLE Analyse vibratoire expérimentale : outil de surveillance et de diagnostic Dr Roger SERRA ENIVL / LMR 1 Contexte (1/2) Première publication de la charte
COLLOQUE NATIONAL de la PERFORMANCE INDUSTRIELLE Analyse vibratoire expérimentale : outil de surveillance et de diagnostic Dr Roger SERRA ENIVL / LMR 1 Contexte (1/2) Première publication de la charte
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
COMMENT FAIRE DES ESCALIERS?
 COMMENT FAIRE DES ESCALIERS? Conception et mise en œuvre GUIDE TECHNIQUE 2012 Union des Métalliers C O L L E CT I O N R E C H E R C H E D É V E LO P P E M E N T M É T I E R 4 INTRODUCTION 13 PARTIE I GÉNÉR
COMMENT FAIRE DES ESCALIERS? Conception et mise en œuvre GUIDE TECHNIQUE 2012 Union des Métalliers C O L L E CT I O N R E C H E R C H E D É V E LO P P E M E N T M É T I E R 4 INTRODUCTION 13 PARTIE I GÉNÉR
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F)
") PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
MEMOIRE DE FIN D'ETUDE
 République Algérienne Démocratique Et Populaire Ministère de l Enseignement Supérieur et de la Recherche Scientifique Université Kasdi Merbah Ouargla Faculté des Sciences et Technologie et Science de la
République Algérienne Démocratique Et Populaire Ministère de l Enseignement Supérieur et de la Recherche Scientifique Université Kasdi Merbah Ouargla Faculté des Sciences et Technologie et Science de la
Introduction. Si dans le kit un produit vous semble endommagé ou non conforme, veuillez faire une photo et nous l envoyer par mail pour vérification.
 Base Chenillard Introduction Avant de commencer le montage, veuillez vérifier l intégralité de la caisse et pointer chaque élément pour vérifier qu il ne manque rien. Il est important de lire la notice
Base Chenillard Introduction Avant de commencer le montage, veuillez vérifier l intégralité de la caisse et pointer chaque élément pour vérifier qu il ne manque rien. Il est important de lire la notice
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position OM est constant et il est égal au
 1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
EPFL 2010. TP n 3 Essai oedomètrique. Moncef Radi Sehaqui Hamza - Nguyen Ha-Phong - Ilias Nafaï Weil Florian
 1 EPFL 2010 Moncef Radi Sehaqui Hamza - Nguyen Ha-Phong - Ilia Nafaï Weil Florian 11 Table de matière Ø Introduction 3 Ø Objectif 3 Ø Déroulement de l eai 4 Ø Exécution de deux palier de charge 6 Ø Calcul
1 EPFL 2010 Moncef Radi Sehaqui Hamza - Nguyen Ha-Phong - Ilia Nafaï Weil Florian 11 Table de matière Ø Introduction 3 Ø Objectif 3 Ø Déroulement de l eai 4 Ø Exécution de deux palier de charge 6 Ø Calcul
CFAO Usinage sur machine à commande numérique
 CFAO Usinage sur machine à commande numérique Pour réaliser une pièce à l aide d une machine à commande numérique, on doit respecter les étapes suivantes : Dessin matriciel et dessin vectoriel : Matriciel
CFAO Usinage sur machine à commande numérique Pour réaliser une pièce à l aide d une machine à commande numérique, on doit respecter les étapes suivantes : Dessin matriciel et dessin vectoriel : Matriciel
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
MODELISATION DES SYSTEMES MECANIQUES
 Département Génie Mécanique Alain DAIDIE Manuel PAREDES MODELISATION DES SYSTEMES MECANIQUES Semestre 8 Version : 009/00 Formation : Réf. ECTS du cours : 4ème Année GM I4GMBE3 Institut National des Sciences
Département Génie Mécanique Alain DAIDIE Manuel PAREDES MODELISATION DES SYSTEMES MECANIQUES Semestre 8 Version : 009/00 Formation : Réf. ECTS du cours : 4ème Année GM I4GMBE3 Institut National des Sciences
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
Analyse statique d une pièce
 Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
DOCM 2013 http://docm.math.ca/ Solutions officielles. 1 2 10 + 1 2 9 + 1 2 8 = n 2 10.
 A1 Trouvez l entier positif n qui satisfait l équation suivante: Solution 1 2 10 + 1 2 9 + 1 2 8 = n 2 10. En additionnant les termes du côté gauche de l équation en les mettant sur le même dénominateur
A1 Trouvez l entier positif n qui satisfait l équation suivante: Solution 1 2 10 + 1 2 9 + 1 2 8 = n 2 10. En additionnant les termes du côté gauche de l équation en les mettant sur le même dénominateur
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4)
") FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
FONCTIONS DE PLUSIEURS VARIABLES (Outils Mathématiques 4) Bernard Le Stum Université de Rennes 1 Version du 13 mars 2009 Table des matières 1 Fonctions partielles, courbes de niveau 1 2 Limites et continuité
NOTIONS ÉLEMENTAIRES SUR LES PNEUS
 CE QU IL Y A DANS UN PNEU CEINTURES BANDE DE ROULEMENT ISOLANT DE NAPPES CARCASSE À ARCEAUX DROITS GARNITURE INTÉRIEURE CARCASSE TRINGLE FLANC La GARNITURE INTÉRIEURE du pneu maintient l air dans le pneu.
CE QU IL Y A DANS UN PNEU CEINTURES BANDE DE ROULEMENT ISOLANT DE NAPPES CARCASSE À ARCEAUX DROITS GARNITURE INTÉRIEURE CARCASSE TRINGLE FLANC La GARNITURE INTÉRIEURE du pneu maintient l air dans le pneu.
EXERCICES DE REVISIONS MATHEMATIQUES CM2
 EXERCICES DE REVISIONS MATHEMATIQUES CM2 NOMBRES ET CALCUL Exercices FRACTIONS Nommer les fractions simples et décimales en utilisant le vocabulaire : 3 R1 demi, tiers, quart, dixième, centième. Utiliser
EXERCICES DE REVISIONS MATHEMATIQUES CM2 NOMBRES ET CALCUL Exercices FRACTIONS Nommer les fractions simples et décimales en utilisant le vocabulaire : 3 R1 demi, tiers, quart, dixième, centième. Utiliser
MANUEL D UTILISATION MODE D EMPLOI ALT 600 MODE D EMPLOI ALT 600 FABRICANT DE MATERIEL SCENIQUE
 1. Présentation. FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION La société ASD est spécialisée dans la conception et le développement de systèmes de levage spécifique à l environnement du spectacle
1. Présentation. FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION La société ASD est spécialisée dans la conception et le développement de systèmes de levage spécifique à l environnement du spectacle
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
COMPTE-RENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre?
 Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
t 100. = 8 ; le pourcentage de réduction est : 8 % 1 t Le pourcentage d'évolution (appelé aussi taux d'évolution) est le nombre :
 est le nombre :") Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
BROSSE DE DÉSHERBAGE GAUCHE/DROITE
 BROSSE DE DÉSHERBAGE GAUCHE/DROITE GÉNÉRALITÉS La brosse est montée sur une plaque de montage DIN [brosse latérale], elle est équipée (d origine) avec des béquilles et peut être montée et démontée par
BROSSE DE DÉSHERBAGE GAUCHE/DROITE GÉNÉRALITÉS La brosse est montée sur une plaque de montage DIN [brosse latérale], elle est équipée (d origine) avec des béquilles et peut être montée et démontée par
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
CORRIGE LES NOMBRES DECIMAUX RELATIFS. «Réfléchir avant d agir!»
 Corrigé Cours de Mr JULES v3.3 Classe de Quatrième Contrat 1 Page 1 sur 13 CORRIGE LES NOMBRES DECIMAUX RELATIFS. «Réfléchir avant d agir!» «Correction en rouge et italique.» I. Les nombres décimaux relatifs.
Corrigé Cours de Mr JULES v3.3 Classe de Quatrième Contrat 1 Page 1 sur 13 CORRIGE LES NOMBRES DECIMAUX RELATIFS. «Réfléchir avant d agir!» «Correction en rouge et italique.» I. Les nombres décimaux relatifs.
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Vis à béton FBS et FSS
 Vis à béton FBS et FSS Un montage rapide et de hautes performances. ETA-11/0093 ETAG 001-6 Usage multiple pour application non structurelle dans le béton Z-21.8-2015 ETA-11/0095 ETAG 001-3 Option 1 pour
Vis à béton FBS et FSS Un montage rapide et de hautes performances. ETA-11/0093 ETAG 001-6 Usage multiple pour application non structurelle dans le béton Z-21.8-2015 ETA-11/0095 ETAG 001-3 Option 1 pour
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Si deux droites sont parallèles à une même troisième. alors les deux droites sont parallèles entre elles. alors
 N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
OLYMPIADES ACADÉMIQUES DE MATHÉMATIQUES
 OLYMPIADES ACADÉMIQUES DE MATHÉMATIQUES ACADÉMIE DE RENNES SESSION 2006 CLASSE DE PREMIERE DURÉE : 4 heures Ce sujet s adresse à tous les élèves de première quelle que soit leur série. Il comporte cinq
OLYMPIADES ACADÉMIQUES DE MATHÉMATIQUES ACADÉMIE DE RENNES SESSION 2006 CLASSE DE PREMIERE DURÉE : 4 heures Ce sujet s adresse à tous les élèves de première quelle que soit leur série. Il comporte cinq
Catalogue de machines. CNC-Carolo. Edition de juillet 2011
 Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR. Lecteurs optiques numériques
 ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l Ingénieur CONCOURS D ADMISSION 2010 COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR (Durée : 4 heures) L utilisation des calculatrices
ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l Ingénieur CONCOURS D ADMISSION 2010 COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR (Durée : 4 heures) L utilisation des calculatrices
Angles orientés et trigonométrie
 Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Chapitre Angles orientés et trigonométrie Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Trigonométrie Cercle trigonométrique. Radian. Mesure d un angle orienté, mesure principale.
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Exercices - Nombres complexes : corrigé. Formes algébriques et trigonométriques, module et argument
 Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
Formes algébriques et trigonométriques, module et argument Exercice - - L/Math Sup - On multiplie le dénominateur par sa quantité conjuguée, et on obtient : Z = 4 i 3 + i 3 i 3 = 4 i 3 + 3 = + i 3. Pour
BIFFI. Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in.
 Actionneurs GIG/GIGS à gaz direct de Biffi BIFFI Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in. Caractéristiques et avantages Cylindres
Actionneurs GIG/GIGS à gaz direct de Biffi BIFFI Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in. Caractéristiques et avantages Cylindres
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
LE PRODUIT SCALAIRE ( En première S )
") LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Baies serveur CATALOGUE DES PRODUITS DE ZPAS GROUPE. ZPAS-ESTCI 7, rue de l industrie 68360 SOULTZ 03 89 62 56 40 contact@estci.fr
 Baies serveur CATALOGUE DES PRODUITS DE ZPAS GROUPE ZPAS-ESTCI, rue de l industrie 0 SOULTZ 0 9 2 0 contact@estci.fr SZB SE 19 " BAIE SERVEUR BÂTI ASSURANT LA PROTECTION DU MATÉRIEL INSTALLÉ DANS LES SALLES
Baies serveur CATALOGUE DES PRODUITS DE ZPAS GROUPE ZPAS-ESTCI, rue de l industrie 0 SOULTZ 0 9 2 0 contact@estci.fr SZB SE 19 " BAIE SERVEUR BÂTI ASSURANT LA PROTECTION DU MATÉRIEL INSTALLÉ DANS LES SALLES
Ce guide se divise en six chapitres, dont quatre sont dédiés à une catégorie de bâtiment :
 INTRODUCTION Constructions de pointe et d usage courant, les escaliers métalliques doivent répondre à d autres exigences, que celle de pouvoir passer d un niveau à un autre. L un des principaux points
INTRODUCTION Constructions de pointe et d usage courant, les escaliers métalliques doivent répondre à d autres exigences, que celle de pouvoir passer d un niveau à un autre. L un des principaux points
Eléments mobiles du moteur Moteur 1/9
 Eléments mobiles du moteur Moteur 1/9 I Diagnostic des anomalies - Perte de compression ( par les segment ou par le piston ). - Consommation d huile ( remontée d huile dans la chambre ). - Bruits de fonctionnement
Eléments mobiles du moteur Moteur 1/9 I Diagnostic des anomalies - Perte de compression ( par les segment ou par le piston ). - Consommation d huile ( remontée d huile dans la chambre ). - Bruits de fonctionnement
des giratoires en béton
 Chapitre Réalisation des giratoires en béton.1 Les giratoires en béton à dalles courtes.1.1 Les joints et leur calepinage.2 Les giratoires à dalles courtes goujonnées.3 Les giratoires en béton armé continu.
Chapitre Réalisation des giratoires en béton.1 Les giratoires en béton à dalles courtes.1.1 Les joints et leur calepinage.2 Les giratoires à dalles courtes goujonnées.3 Les giratoires en béton armé continu.
Mécanique : Cinématique du point. Chapitre 1 : Position. Vitesse. Accélération
 2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples
 45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
45 Fonctions de plusieurs variables : dérivés partielles, diérentielle. Fonctions composées. Fonctions de classe C 1. Exemples Les espaces vectoriels considérés sont réels, non réduits au vecteur nul et
FONTANOT CREE UNE LIGNE D ESCALIERS IMAGINÉE POUR CEUX QUI AIMENT LE BRICOLAGE.
 STILE FONTANOT CREE UNE LIGNE D ESCALIERS IMAGINÉE POUR CEUX QUI AIMENT LE BRICOLAGE. 2 3 Magia. Une gamme de produits qui facilitera le choix de votre escalier idéal. 4 06 Guide pour la sélection. 16
STILE FONTANOT CREE UNE LIGNE D ESCALIERS IMAGINÉE POUR CEUX QUI AIMENT LE BRICOLAGE. 2 3 Magia. Une gamme de produits qui facilitera le choix de votre escalier idéal. 4 06 Guide pour la sélection. 16
AC AB. A B C x 1. x + 1. d où. Avec un calcul vu au lycée, on démontre que cette solution admet deux solutions dont une seule nous intéresse : x =
 LE NOMBRE D OR Présentation et calcul du nombre d or Euclide avait trouvé un moyen de partager en deu un segment selon en «etrême et moyenne raison» Soit un segment [AB]. Le partage d Euclide consiste
LE NOMBRE D OR Présentation et calcul du nombre d or Euclide avait trouvé un moyen de partager en deu un segment selon en «etrême et moyenne raison» Soit un segment [AB]. Le partage d Euclide consiste
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
Cours de tracés de Charpente, Le TRAIT
 Page 1/5 Cours de tracés de Charpente, Le TRAIT Recherches de vraies grandeurs, angles de coupes, surfaces. Les Méthodes : Le tracé et les calculs Chaque chapitre ou fichier comportent une explication
Page 1/5 Cours de tracés de Charpente, Le TRAIT Recherches de vraies grandeurs, angles de coupes, surfaces. Les Méthodes : Le tracé et les calculs Chaque chapitre ou fichier comportent une explication
CHAÎNES INO Axes en HB: Standard Extra Plus SPCL / SPSL
 CHAÎNES INOX Les chaînes en acier System Plast sont développées en collaboration avec les constructeurs de convoyeurs leader dans le domaine de l embouteillage. Nous produisons avec les technologies les
CHAÎNES INOX Les chaînes en acier System Plast sont développées en collaboration avec les constructeurs de convoyeurs leader dans le domaine de l embouteillage. Nous produisons avec les technologies les
Cylindres de roue ATE d origine Allégés et résistants aux liquides de frein
 Cylindres de roue ATE d origine Allégés et résistants aux liquides de frein 1 Cylindres de roue ATE d origine ATE est une marque du groupe Continental, l un des plus grands spécialistes mondiaux du freinage
Cylindres de roue ATE d origine Allégés et résistants aux liquides de frein 1 Cylindres de roue ATE d origine ATE est une marque du groupe Continental, l un des plus grands spécialistes mondiaux du freinage
ANNEXE J POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS SELON UN CHARGEMENT CYCLIQUE ET STATIQUE
 562 ANNEXE J POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS SELON UN CHARGEMENT CYCLIQUE ET STATIQUE 563 TABLE DES MATIÈRES ANNEXE J... 562 POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS
562 ANNEXE J POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS SELON UN CHARGEMENT CYCLIQUE ET STATIQUE 563 TABLE DES MATIÈRES ANNEXE J... 562 POTEAUX TESTÉS SELON UN CHARGEMENT STATIQUE ET TESTÉS
Les Services Polysius.
 Les Services Polysius. Notre nouveau nom est ThyssenKrupp Industrial Solutions www.thyssenkrupp-industrial-solutions.com Une entreprise de ThyssenKrupp Technologies Polysius tk 2 Mondialement la pression
Les Services Polysius. Notre nouveau nom est ThyssenKrupp Industrial Solutions www.thyssenkrupp-industrial-solutions.com Une entreprise de ThyssenKrupp Technologies Polysius tk 2 Mondialement la pression
Mathématiques et petites voitures
 Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit