Cours brique ISAT Filtrage et extraction de caractéristiques sur les images RSO Florence Tupin Année
|
|
|
- Marcel Chartier
- il y a 8 ans
- Total affichages :
Transcription

1 Cours brique ISAT Filtrage et extraction de caractéristiques sur les images RSO Florence Tupin Année

2 Plan Filtrage des images radar Rappels sur les statistiques Maximisation a posteriori Minimisation de l EQM Améliorations des estimations Extraction de caractéristiques Détection de cibles Détection de contours et lignes Méthodes de segmentation 2

3 Plan Filtrage des images radar Rappels sur les statistiques Maximisation a posteriori Minimisation de l EQM Améliorations des estimations Extraction de caractéristiques Détection de cibles Détection de contours et lignes Méthodes de segmentation 3

4 Filtrage des images radar - Rappels sur les statistiques Principe du speckle Chatoiement totalement développé mono-vue Chatoiement totalement développé multi-vues Prise en compte de texture Prise en compte d un fort rétrodiffuseur 4

5 Filtrage des images radar - Rappels sur les statistiques 5

6 Rappels sur les statistiques - Qu est ce qu une image radar? Quel signal? Onde rétrodiffusée acquise sous la forme Ae iφ A cos(φ) et A sin(φ) mesurés par le système 1. La partie réelle A cos(φ)? 2. La partie imaginaire A sin(φ)? 3. La phase φ? 4. L amplitude A? 5. L intensité I = A 2? Exemples des produits fournis par le satellite ERS 1. Produit SLC (Single Look Complex) partie réelle et imaginaire 2. Produit PRI (PRecision Product) image d amplitude en 3 looks 6

7 Rappels sur les statistiques - Principe du speckle Cellule de résolution (dimensions λ) N réflecteurs élémentaires E = A e iφ = N a j e iφ j j=1 Chaque réflecteur se comporte comme une source cohérente avec les autres 1. phénomène d interférences 2. addition en amplitude (et non en intensité) somme vectorielle Répartition aléatoire des réflecteurs champ réfléchi variable aléatoire 7
 somme vectorielle Répartition aléatoire des")
8 Rappels sur les statistiques - Principe du speckle Modèle de Goodman E = A e iφ = N a j e iφ j j=1 Propriétés statistiques des réflecteurs 1. a j et φ j sont indépendantes l une de l autre pour le réflecteur j 2. a j et φ j sont indépendantes des amplitudes et phases des autres réflecteurs 3. Les phases φ j sont uniformément distribuées sur [ π, π] ( la surface est rugueuse devant λ) 8

9 Rappels sur les statistiques - Principe du speckle Statistiques des parties réelle et imaginaire Re(E) = N a j cos(φ j ) j=1 N Im(E) = a j sin(φ j ) j=1 N N < Re(E) >= < a j cos(φ j ) >= < a j >< cos(φ j ) > j=1 j=1 < Re(E) >= 0 N N < Im(E) >= < a j sin(φ j ) >= < a j >< sin(φ j ) > j=1 j=1 < Im(E) >= 0 V ar(re(e)) = V ar(im(e)) = N 2 < a2 1 >= σ 2 9
 > j=1 j=1 < Im(E) >= 0 V ar(re(e)) = V ar(im(e)) = N 2 < a2 1 >=")
10 Rappels sur les statistiques - Pincipe du speckle Théorème central limite pour N grand Re(E) et Im(E) asymptotiquement gaussiennes de moyennes nulles et de variance σ 2 Re(E) et Im(E) indépendantes p(re(e), Im(E)) = 1 2πσ 2 exp Changement de variables pour I 0 et π φ π, et 0 sinon I = A 2 = Re(E) 2 + Im(E) 2 φ = tan 1 ( Im(E) Re(E) ( Re(E)2 + Im(E) 2 ) ) p(i, φ) = 1 I e( ) 2σ 4πσ σ 2
 2 + Im(E) 2 φ = tan 1 ( Im(E) Re(E) ( Re(E)2 + Im(E) 2 ) ) p(i, φ) = 1 I e( ) 2σ")
11 Rappels sur les statistiques - Pincipe du speckle Loi de la phase p(φ) = + 0 p(i, φ)di p(φ) = 1 2π pour π φ π, 0 sinon Loi uniforme Loi de l intensité R = 2σ 2 σ 0 p(i) = +π π p(i, φ)dφ p(i) = 1 R e( I R) pour I 0, 0 sinon Loi exponentielle négative 11
 = 1 R e( I R) pour I 0, 0 sinon Loi exponentielle")
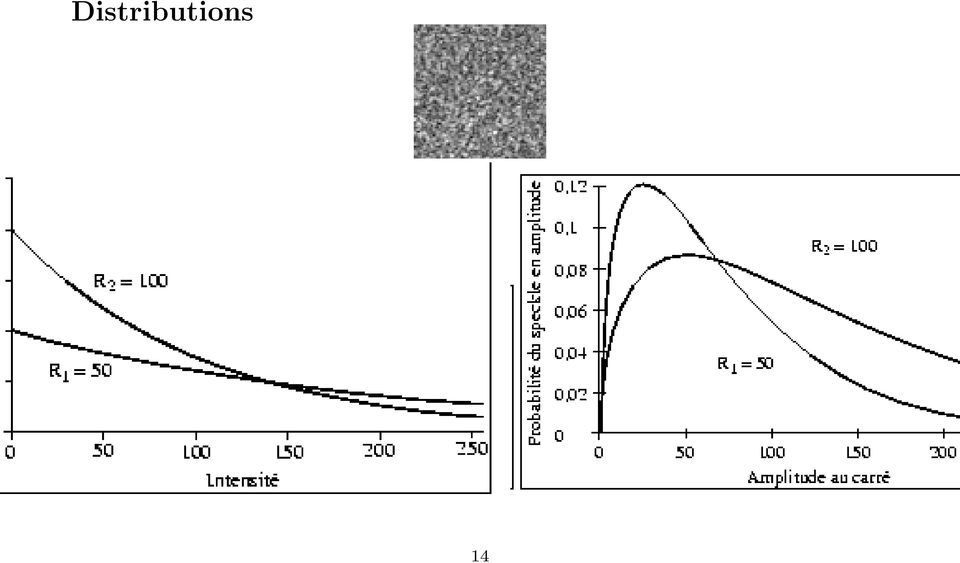
12 Rappels sur les statistiques - cas mono-vue Cas du chatoiement totalement développé (modèle de Goodman) mono-vue (réflectivité sous-jacente R) Distribution de la phase φ uniforme sur [ π; π] Distribution de l intensité I p(i) = 1 R e( I R) loi exponentielle, µ I = σ I = R et γ I = σ I µ I = 1 Distribution de l amplitude A p(a) = 2A R e A2 R πr loi de Rayleigh, moyenne µ A = 4, γ A = σ A µa = 12 4 π
 = 2A R e A2 R πr loi de Rayleigh, moyenne µ A = 4, γ A = σ A µa =")
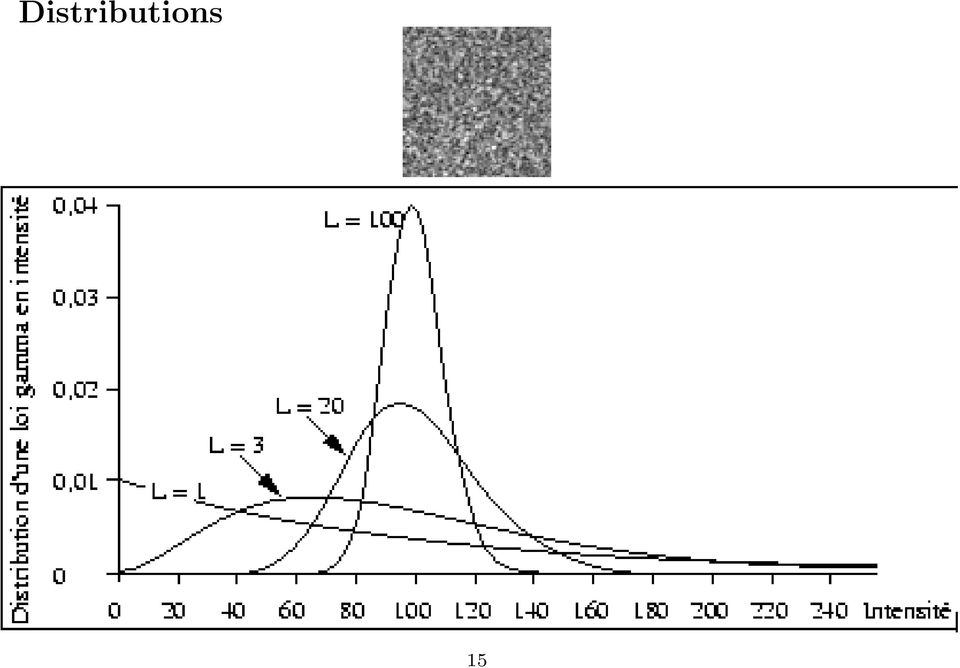
13 Rappels sur les statistiques - cas multi-vues Cas du chatoiement totalement développé (modèle de Goodman) multi-vues (L) Distribution de la phase φ uniforme sur [ π; π] Distribution de l intensité I p L (I) = LL R L Γ(L) I(L 1) e ( LI R ) loi Gamma, µ I = R, σ I = R L, γ I = 1 L Distribution de l amplitude A p L (A) = 2LL R L Γ(L) A(2L 1) e LA2 R Loi Nakagami (χ ou Gamma généralisée), γ A L 13
 = 2LL R L Γ(L) A(2L 1) e LA2 R Loi Nakagami (χ ou Gamma généralisée), γ A 0.")
14 Distributions 14
15 Distributions 15
16 Rappels sur les statistiques - modèle multiplicatif Modèle multiplicatif image L-looks en intensité, R la réflectivité de la scène S le speckle normalisé (loi Gamma normalisée, µ S = 1, σ S = 1 L ) p(s) = LL Γ(L) SL 1 exp( LS) modèle multiplicatif : I = SR 16
 p(s) = LL Γ(L) SL 1 exp( LS) modèle multiplicatif :")
17 Rappels sur les statistiques - modèle multiplicatif Distribution du produit de 2 v.a. p(z = xy) = p(x)p( z x ) 1 x dx Distribution de l intensité I = RS p(i = RS) = p(r)p(s = I R ) 1 R dr or p(s = I R ) 1 R = p(i R) vu précédemment modèle multiplicatif modèle probabiliste direct 17
 = p(r)p(s = I R ) 1 R dr or p(s = I R ) 1 R = p(i R) vu")
18 Rappels sur les statistiques Loi de la réflectivité R 1. Si R = R 0 (constante) zone homogène I suit une loi Gamma de moyenne R 0 p(i) = LL R L 0 Γ(L)IL 1 exp ( LI R 0 ) 2. Si R suit une loi Gamma I suit une loi K 3. Si R suit une loi Gamma inverse I suit une loi de Fisher 18

19 Rappels sur les statistiques Chatoiement totalement développé conditions de validité (avec ou sans texture) : surfaces naturelles hypothèses sur la texture (modèles de distribution de R) : surfaces océaniques : système de Pearson (distributions U, B, W) distribution Gaussienne inverse Autres modèles (directement sur I) distribution log-normale distribution de Weibull distribution de Rice (un fort réflecteur) loi de Fisher (modèle à queue lourde, milieu urbain) 19
 loi de Fisher (modèle à queue lourde,")
20 Filtrage des images radar Objectifs éliminer au maximum le phénomène de speckle se ramener à des techniques classiques utilisées en optique estimation de la réflectivité R Contraintes préserver la texture de la scène ne pas créer d artefacts 20

21 Filtres aveugles ne prennent pas en compte les statistiques du speckle Le filtre moyenne bonne réduction du speckle perte des contours (flou) Le filtre médian meilleure préservation des contours moins bonne réduction du speckle Filtre géométrique de Crimmins (filtre morphologique sur la forme d une ligne des niveaux de gris) bon filtre mais perte de la texture, et de certaines réponses 21
22 Filtres adaptatifs prennent en compte explicitement le modèle de speckle problème posé en tant qu estimation de la réflectivité R par ˆR Critères mathématiques utilisés minimisation de l erreur quadratique moyenne E(( ˆR R) 2 ) maximisation de la probabilité de R connaissant I ˆR = argmax P (R I) 22
23 Plan Filtrage des images radar Rappels sur les statistiques Maximisation a posteriori Minimisation de l EQM Améliorations des estimations Extraction de caractéristiques Détection de cibles Détection de contours et lignes Méthodes de segmentation 23
24 Maximisation a posteriori P (R I) = P (I R)P (R) P (I) Sans a priori sur R : estimateur au sens du maximum de vraisemblance P (I R) Critère ponctuel ˆR = argmaxp (I R) ˆR = I Sur un voisinage spatial P (I 1, I 2,..., I N R) = Π i P (I i R) ˆR = 1 N i I i 24
25 Maximisation a posteriori : filtre Gamma-MAP (Lopes) P (R I) = P (I R)P (R) P (I) p(i R) speckle (loi Gamma) p(r) loi Gamma (modèle de texture) avec α = 1 γ 2 R p(r) = 1 Γ(α) ( α R )α e αr R R α 1 25
26 Maximisation a posteriori : filtre Gamma-MAP (Lopes) Forme de la solution Critère MAP : ˆR maximisant p(r I) ˆR = 1 ( I(α L 1) + 2α Estimation des paramètres des lois ) I 2 (α L 1) 2 + 4αLII utilisation d un voisinage spatial autour du pixel considéré (estimation par la méthode des moments, MV, log-cumulants, etc.) problème choix des échantillons variance des estimateurs 26
27 Filtrage Gamma - MAP 27
28 Maximisation a posteriori : filtre Fisher-MAP P (R I) = P (I R)P (R) P (I) p(i R) speckle (loi Gamma) p(r) loi de Fisher Forme de la solution Critère MAP : ˆR maximisant p(r I) ˆR = LI + MI 1 + L + M avec L, I, M estimés par des log-cumulants 28
29 Filtrage Fisher - MAP 29
30 Estimation des paramètres Coefficient de variation de la scène pour I = RS σi 2 = E(I I) 2 = E((RS) 2 (RS 2 ) = E(R 2 )E(S 2 ) R 2 S 2 = (σr 2 + R 2 )(σs 2 + S 2 ) R 2 S 2 = σr(σ 2 S 2 + S 2 ) + R 2 S 2 γ 2 R = γ2 I γ2 S 1 + γ 2 S et γ 2 S = 1 L 30
31 Plan Filtrage des images radar Rappels sur les statistiques Maximisation a posteriori Minimisation de l EQM Améliorations des estimations Extraction de caractéristiques Détection de cibles Détection de contours et lignes Méthodes de segmentation 31
32 Filtres minimisant l EQM - filtre de Lee minimisation de E(( ˆR R) 2 ) + solution linéaire ˆR = ai + b (contraintes : sans biais E( ˆR) = E(R) et cov( ˆR R, I) = 0) Filtre de Lee approximation : on néglige (R E(R))(S E(S)) ˆR = I + k(i I) k = 1 γ2 S γ 2 I NB : I intensité au site considéré, I moyenne locale de I, γ I coefficient de variation local 1. Zone homogène γ I γ S k = 0 ˆR = I 2. Zone très hétérogène γ I γ S k = 1 ˆR = I 32
33 Filtres minimisant l EQM - filtre de Kuan minimisation de E((hatR R) 2 ) + solution linéaire ˆR = ai + b (contraintes : sans biais E( ˆR) = E(R) et cov( ˆR R, I) = 0) Le filtre de Kuan formulation exacte k = 1 γ S 2 γ I 2 1+γS 2 1. Zone homogène γ I γ S k = 0 ˆR = I 2. Zone très hétérogène γ I γ S k = 1 1+γS 2 ˆR = I + 1 (I I) 1+γS 2 33
34 Filtres homomorphiques - Arsenault et Levesque Principe transformation logarithmique de l image filtrage adaptatif en considérant le bruit comme additif transformation exponentielle de l image logarithmique filtrée Inconvénient au niveau théorique : pertes des contraintes d optimalité du filtre au cours des transformations au niveau pratique : présence de distorsions sur les images filtrées (artefacts) 34
35 Plan Filtrage des images radar Rappels sur les statistiques Maximisation a posteriori Minimisation de l EQM Améliorations des estimations Extraction de caractéristiques Détection de cibles Détection de contours et lignes Méthodes de segmentation 35
36 Améliorations des estimations P (M 6% σ µ M + 6%) = 80% 230 pixels Calcul des statistiques locales ne prendre en compte que les pixels appartenant à la même zone filtres adaptatifs également au sens spatial Recherche de la plus grande zone homogène centrée en un pixel par croissance de fenêtres Détection de contours et de structures parallèlement au filtrage pour les préserver 36
37 Filtre de Wu et Maître Filtre par croissance de régions Recherche de la plus grande zone homogène centrée en un pixel par croissance de fenêtres test sur γ local 1. si γ réflect. spécul. 2. si γ contour séparation de la fenêtre 3. si γ faible et γ init fort contour 4. si γ et γ init petits zone homogène 37
38 Filtrage par croissance de régions 38
39 Filtre avec préservation de structures de Lopes Filtre avec détection couplée de contours, lignes et cibles Principe : fenêtre de taille fixe (12 12) et série de tests avant le calcul des statistiques 1. si la zone est homogène utilisation de la totalité des échantillons de la fenêtre 2. si inhomogène si contour subdivision de la fenêtre si cible ˆR = I 39
40 Filtrage multi-temporel Principe combinaison de plusieurs images acquises à des dates différentes Performances réduction drastique du chatoiement Problèmes acquisition des images recalage variation du paysage (végétation) entre 2 dates 40
41 Filtrage multi-temporel Modèle I = RS, N canaux i, corrélation ρ Iij = <I ii j > <I i ><I j > σ 2 I i σ 2 I j ˆR i = N j=1 α j I j < I i > < I j > avec N j=1 α j = 1 Minimisation de l EQM (homogène) < ( ˆR i R i ) 2 > N α i (ρ Iij ρ I1j ) = 0 j=1 un seul jeu de coefficients ˆR i = ˆR 1 < I i > < I 1 > 41
42 Minimisation de la variance de l estimateur N α i (ρ Iij γ Ii γ Ij ρ I1j γ I1 γ Ij ) = 0 j=1 un seul jeu de coefficients Minimisation de l EQM (cas texture) N jeux de coefficients Aspects pratiques performance limite L = NL (décorrélation complète) < I i >, ρ Iij estimations locales en chaque pixel 42
43 Filtrage multi-temporel 43
44 Extraction de caractéristiques Détection de cibles Détection de contours et de lignes Méthodes de segmentation 44
45 Principe de la détection Etablissement d une mesure m indiquant la présence d une structure (cible, contour, ligne) analyse statistique de cette mesure Etude des performances Pour un seuil donné sur m, calcul en fonction des grandeurs impliquées (contraste avec le fond ou du contour, nombre d échantillons utilisés) : de la probabilité de détection Pd de la probabilité de fausse alarme Pfa 45
46 Détection de cibles Cibles : essentiellement points brillants (man-made structures) Mise en échec des méthodes classiques Principe différences radiométriques (hypothèse sous-jacente de bruit additif) Inconvénient imagerie radar : moyenne augmente écart-type augmente augmentation des fausses alarmes dans les zones plus claires Solution pour avoir un détecteur CFAR (Constant False Alarm Rate) adapter localement le seuil en fonction de la radiométrie moyenne développer des détecteurs qui soient adaptés à l imagerie radar 46
47 Approche par seuillage sur l intensité Principe rapport de vraisemblance (C classe cible, F classe fond) P (X (x) C) P (X (x) F ) si la distribution des cibles est inconnue, on utilise le critère : probabilité de fausse alarme P (X (x) F ) < s x > t Pfa = + t p(x F )dx 47
48 Approche par seuillage sur l intensité détermination du seuil si image homogène : seuil global sinon seuil calculé localement (définition d une zone neutre) F F C C 48
49 Utilisation du rapport Principe confrontation de 2 hypothèses sur un voisinage du point : il existe une seule et même région il existe deux régions, la cible et le fond avec des lois Gamma 1-vue : log[ P (I i,..., i V 1 R 1 )P (I i,..., i V 2 R 2 ) ] P (I i,..., i V R) λ(n 1, N 2, R 1, R 2, R) = N 1 (ln R 1 + Î1 R 1 ) N 2 (ln R 2 + Î2 R 2 )+(N 1 +N 2 )(ln R+ Î R ) ˆλ(N 1, N 2 ) = N 1 ln Î1 N 2 ln Î2 + (N 1 + N 2 ) ln Î 49
50 Utilisation du rapport Expression en fonction de r r = Î1 Î2 : ˆλ(N 1, N 2 ) = N 1 ln r + (N 1 + N 2 ) ln( N 1r + N 2 N 1 + N 2 ) Distribution de r pour une image mono-vue p(r c = R 1 R 2, N 1, N 2 ) = Γ(N 1 + N 2 ) Γ(N 1 )Γ(N 2 ) 1 r (N 1r N 2 c )N 1 (1 + N 1r N 2 c )N 1+N 2 50
51 Utilisation du rapport Probabilité de détection et taux de fausse alarme Pd(c, N 1, N 2 ) = Pfa(N 1, N 2 ) = t1 0 t1 0 p(r c, N 1, N 2 )dr + p(r c = 1, N 1, N 2 )dr + + t 2 p(r c, N 1, N 2 )dr (1) + t 2 p(r c = 1, N 1, N 2 )dr où : f(t) = Pd(c, N 1, N 2 ) = 1 Γ(N 1 + N 2 ) N 1 Γ(N 1 )Γ(N 2 ) [f(t 2) f(t 1 )] ( β2 t ) N1 β 1 + β 2 t et où : β 1 = R 1 N 1 et β 2 = R 2 N 2. 2F 1 [N 1, N 2 + 1; N 1 + 1; ] β 2 t β 1 + β 2 t 51
52 Conclusion sur la détection de cibles limites de l approche statistique possible seulement si les distributions sont connues (limites des lois Gamma, expressions non-analytiques pour des modèles plus compliqués) alternatives approches plus empiriques (utilisation du coefficient de variation, outils de morphologie mathématique, etc.) découpage en sous-bandes 52
53 Détecteurs de contours Approches classiques gradient différences de moyennes radiométriques taux de fausse alarme variable Approche CFAR rapport des moyennes arithmétiques 53
54 Détecteur de contours rapport a. b. c. r m = max(î1 Î 2, Î2 Î 1 ) a b c d e f 4 1 f(r) 3 f(r) r r
55 Détecteurs de contours rapport normalisé r n = min(î1 Î 2, Î2 Î 1 ) (2) PD 0.5 PD dB 3dB 2dB 1dB x11 9x9 7x7 5x5 3x PFA PFA 55
56 Détecteurs de contours 56
57 Rapport de moyennes pondérées exponentiellement Principe adaptation de l approche de Shen et Castan filtrage pondéré par la distance au contour dans le calcul de la moyenne ˆR x1 (x, y) = f 1 (x) (f(y) I(x, y)) ˆR x2 (x, y) = f 2 (x) (f(y) I(x, y)) y x y x y x y x
58 Rapport de moyennes pondérées exponentiellement 58
59 Détecteurs de contours Passage à plusieurs directions 2 approches possibles : utiliser deux directions orthogonales et les combiner utiliser des masques orientés dans plusieurs directions et garder la réponse maximale Amincissement des contours passage par un maximum du détecteur dans la direction perpendiculaire au contour 59
60 Détecteurs de lignes - détecteur rapport Expression Distribution r l = min(r 12 n, r 13 n ) p(r l ) = p(r 12 n )Φ(r 13 n ) + p(r 13 n )Φ(r 12 n ) Probabilités de détection et de fausse alarme Pd(s, c 12, c 13, N 1, N 2, N 3 ) = Pfa(s, c, N 1, N 2, N 3 ) = = 1 s 1 s 1 s p(r l c 12, c 13, N 1, N 2, N 3 )dr l p(r l c 12 = 1, c 13 = c, N 1, N 2, N 3 )dr l p(r l c 12 = c, c 13 = 1, N 1, N 2, N 3 )dr l 60
61 Détecteurs de lignes - détecteur rapport detection probability P(c2,c3) detection probability contrast c contrast c3 false alarm probability %
62 Détecteurs de lignes - détecteur corrélation Expression ρ l = min(ρ 12, ρ 13 ) Comparaison ρ 2 = (N 1 + N 2 ) N 1γ 2 R 1 r 2 n + N 2 γ 2 R 2 N 1 N 2 (r n 1) 2 prise en compte non seulement du contraste mais aussi de l homogénéité des deux zones pas d expression analytique mais simulation des distributions et probabilités de détection et de fausse alarme 62
63 62-1
64 Méthodes de segmentation - approches contours détection de contours calcul de la ligne de partage des eaux contours = crêtes fermeture des contours par sur-segmentation fusion des régions test statistique entre deux régions adjacentes 63
65 Méthodes de segmentation - classification Méthodes supervisées : Apprentissage choix des classes définition d un ensemble d apprentissage choix de modèles paramétriques de distributions et calcul des paramètres associés Classification maximum de vraisemblance ou maximum a posteriori (= avec ou sans a priori) (ex d a priori : hypothèse markovienne pour contraindre la régularité de la solution) 64
66 Méthodes de segmentation - classification Méthodes non supervisées : Classification apprentissage automatique : le type de loi et les paramètres associés sont appris automatiquement (NB le nombre de classes est donné) au cours de la classification ex d a priori : champs, chaînes ou arbres de Markov 65
67 Exemple de classification Zone urbaine à haute résolution 66
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Soutenance de stage Laboratoire des Signaux et Systèmes
 Soutenance de stage Laboratoire des Signaux et Systèmes Bornes inférieures bayésiennes de l'erreur quadratique moyenne. Application à la localisation de points de rupture. M2R ATSI Université Paris-Sud
Soutenance de stage Laboratoire des Signaux et Systèmes Bornes inférieures bayésiennes de l'erreur quadratique moyenne. Application à la localisation de points de rupture. M2R ATSI Université Paris-Sud
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Quantification Scalaire et Prédictive
 Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
Quantification Scalaire et Prédictive Marco Cagnazzo Département Traitement du Signal et des Images TELECOM ParisTech 7 Décembre 2012 M. Cagnazzo Quantification Scalaire et Prédictive 1/64 Plan Introduction
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
TABLE DES MATIERES. C Exercices complémentaires 42
 TABLE DES MATIERES Chapitre I : Echantillonnage A - Rappels de cours 1. Lois de probabilités de base rencontrées en statistique 1 1.1 Définitions et caractérisations 1 1.2 Les propriétés de convergence
TABLE DES MATIERES Chapitre I : Echantillonnage A - Rappels de cours 1. Lois de probabilités de base rencontrées en statistique 1 1.1 Définitions et caractérisations 1 1.2 Les propriétés de convergence
Mesure agnostique de la qualité des images.
 Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
Mesure agnostique de la qualité des images. Application en biométrie Christophe Charrier Université de Caen Basse-Normandie GREYC, UMR CNRS 6072 Caen, France 8 avril, 2013 C. Charrier NR-IQA 1 / 34 Sommaire
MCMC et approximations en champ moyen pour les modèles de Markov
 MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
Détection en environnement non-gaussien Cas du fouillis de mer et extension aux milieux
 Détection en environnement non-gaussien Cas du fouillis de mer et extension aux milieux hétérogènes Laurent Déjean Thales Airborne Systems/ENST-Bretagne Le 20 novembre 2006 Laurent Déjean Détection en
Détection en environnement non-gaussien Cas du fouillis de mer et extension aux milieux hétérogènes Laurent Déjean Thales Airborne Systems/ENST-Bretagne Le 20 novembre 2006 Laurent Déjean Détection en
Modélisation aléatoire en fiabilité des logiciels
 collection Méthodes stochastiques appliquées dirigée par Nikolaos Limnios et Jacques Janssen La sûreté de fonctionnement des systèmes informatiques est aujourd hui un enjeu économique et sociétal majeur.
collection Méthodes stochastiques appliquées dirigée par Nikolaos Limnios et Jacques Janssen La sûreté de fonctionnement des systèmes informatiques est aujourd hui un enjeu économique et sociétal majeur.
Dan Istrate. Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier
 Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
Détection et reconnaissance des sons pour la surveillance médicale Dan Istrate le 16 décembre 2003 Directeur de thèse : Eric Castelli Co-Directeur : Laurent Besacier Thèse mené dans le cadre d une collaboration
Intérêt du découpage en sous-bandes pour l analyse spectrale
 Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Le concept cellulaire
 Le concept cellulaire X. Lagrange Télécom Bretagne 21 Mars 2014 X. Lagrange (Télécom Bretagne) Le concept cellulaire 21/03/14 1 / 57 Introduction : Objectif du cours Soit un opérateur qui dispose d une
Le concept cellulaire X. Lagrange Télécom Bretagne 21 Mars 2014 X. Lagrange (Télécom Bretagne) Le concept cellulaire 21/03/14 1 / 57 Introduction : Objectif du cours Soit un opérateur qui dispose d une
Filtrage stochastique non linéaire par la théorie de représentation des martingales
 Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Filtrage stochastique non linéaire par la théorie de représentation des martingales Adriana Climescu-Haulica Laboratoire de Modélisation et Calcul Institut d Informatique et Mathématiques Appliquées de
Introduction au datamining
 Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Méthodes de Simulation
 Méthodes de Simulation JEAN-YVES TOURNERET Institut de recherche en informatique de Toulouse (IRIT) ENSEEIHT, Toulouse, France Peyresq06 p. 1/41 Remerciements Christian Robert : pour ses excellents transparents
Méthodes de Simulation JEAN-YVES TOURNERET Institut de recherche en informatique de Toulouse (IRIT) ENSEEIHT, Toulouse, France Peyresq06 p. 1/41 Remerciements Christian Robert : pour ses excellents transparents
Probabilités III Introduction à l évaluation d options
 Probabilités III Introduction à l évaluation d options Jacques Printems Promotion 2012 2013 1 Modèle à temps discret 2 Introduction aux modèles en temps continu Limite du modèle binomial lorsque N + Un
Probabilités III Introduction à l évaluation d options Jacques Printems Promotion 2012 2013 1 Modèle à temps discret 2 Introduction aux modèles en temps continu Limite du modèle binomial lorsque N + Un
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Table des matières. I Mise à niveau 11. Préface
 Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
Table des matières Préface v I Mise à niveau 11 1 Bases du calcul commercial 13 1.1 Alphabet grec...................................... 13 1.2 Symboles mathématiques............................... 14 1.3
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING»
 LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
LA NOTATION STATISTIQUE DES EMPRUNTEURS OU «SCORING» Gilbert Saporta Professeur de Statistique Appliquée Conservatoire National des Arts et Métiers Dans leur quasi totalité, les banques et organismes financiers
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
La survie nette actuelle à long terme Qualités de sept méthodes d estimation
 La survie nette actuelle à long terme Qualités de sept méthodes d estimation PAR Alireza MOGHADDAM TUTEUR : Guy HÉDELIN Laboratoire d Épidémiologie et de Santé publique, EA 80 Faculté de Médecine de Strasbourg
La survie nette actuelle à long terme Qualités de sept méthodes d estimation PAR Alireza MOGHADDAM TUTEUR : Guy HÉDELIN Laboratoire d Épidémiologie et de Santé publique, EA 80 Faculté de Médecine de Strasbourg
CONCOURS D ENTREE A L ECOLE DE 2007 CONCOURS EXTERNE. Cinquième épreuve d admissibilité STATISTIQUE. (durée : cinq heures)
") CONCOURS D ENTREE A L ECOLE DE 2007 CONCOURS EXTERNE Cinquième épreuve d admissibilité STATISTIQUE (durée : cinq heures) Une composition portant sur la statistique. SUJET Cette épreuve est composée d un
CONCOURS D ENTREE A L ECOLE DE 2007 CONCOURS EXTERNE Cinquième épreuve d admissibilité STATISTIQUE (durée : cinq heures) Une composition portant sur la statistique. SUJET Cette épreuve est composée d un
Chapitre 7. Statistique des échantillons gaussiens. 7.1 Projection de vecteurs gaussiens
 Chapitre 7 Statistique des échantillons gaussiens Le théorème central limite met en évidence le rôle majeur tenu par la loi gaussienne en modélisation stochastique. De ce fait, les modèles statistiques
Chapitre 7 Statistique des échantillons gaussiens Le théorème central limite met en évidence le rôle majeur tenu par la loi gaussienne en modélisation stochastique. De ce fait, les modèles statistiques
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Géométrie discrète Chapitre V
 Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Master IMA - UMPC Paris 6 RDMM - Année 2009-2010 Fiche de TP
 Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Apprentissage Automatique
 Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
ÉVALUATION FORMATIVE. On considère le circuit électrique RC représenté ci-dessous où R et C sont des constantes strictement positives.
 L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
La classification automatique de données quantitatives
 La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
Exercice autour de densité, fonction de répatition, espérance et variance de variables quelconques.
 14-3- 214 J.F.C. p. 1 I Exercice autour de densité, fonction de répatition, espérance et variance de variables quelconques. Exercice 1 Densité de probabilité. F { ln x si x ], 1] UN OVNI... On pose x R,
14-3- 214 J.F.C. p. 1 I Exercice autour de densité, fonction de répatition, espérance et variance de variables quelconques. Exercice 1 Densité de probabilité. F { ln x si x ], 1] UN OVNI... On pose x R,
FORMULAIRE DE STATISTIQUES
 FORMULAIRE DE STATISTIQUES I. STATISTIQUES DESCRIPTIVES Moyenne arithmétique Remarque: population: m xμ; échantillon: Mx 1 Somme des carrés des écarts "# FR MOYENNE(série) MOYENNE(série) NL GEMIDDELDE(série)
FORMULAIRE DE STATISTIQUES I. STATISTIQUES DESCRIPTIVES Moyenne arithmétique Remarque: population: m xμ; échantillon: Mx 1 Somme des carrés des écarts "# FR MOYENNE(série) MOYENNE(série) NL GEMIDDELDE(série)
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
INF6304 Interfaces Intelligentes
 INF6304 Interfaces Intelligentes filtres collaboratifs 1/42 INF6304 Interfaces Intelligentes Systèmes de recommandations, Approches filtres collaboratifs Michel C. Desmarais Génie informatique et génie
INF6304 Interfaces Intelligentes filtres collaboratifs 1/42 INF6304 Interfaces Intelligentes Systèmes de recommandations, Approches filtres collaboratifs Michel C. Desmarais Génie informatique et génie
Programmes des classes préparatoires aux Grandes Ecoles
 Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voie : Biologie, chimie, physique et sciences de la Terre (BCPST) Discipline : Mathématiques Seconde année Préambule Programme
Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voie : Biologie, chimie, physique et sciences de la Terre (BCPST) Discipline : Mathématiques Seconde année Préambule Programme
Introduction à la Statistique Inférentielle
 UNIVERSITE MOHAMMED V-AGDAL SCIENCES FACULTE DES DEPARTEMENT DE MATHEMATIQUES SMI semestre 4 : Probabilités - Statistique Introduction à la Statistique Inférentielle Prinemps 2013 0 INTRODUCTION La statistique
UNIVERSITE MOHAMMED V-AGDAL SCIENCES FACULTE DES DEPARTEMENT DE MATHEMATIQUES SMI semestre 4 : Probabilités - Statistique Introduction à la Statistique Inférentielle Prinemps 2013 0 INTRODUCTION La statistique
Introduction au Data-Mining
 Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Introduction au Data-Mining Alain Rakotomamonjy - Gilles Gasso. INSA Rouen -Département ASI Laboratoire PSI Introduction au Data-Mining p. 1/25 Data-Mining : Kèkecé? Traduction : Fouille de données. Terme
Interception des signaux issus de communications MIMO
 Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
NON-LINEARITE ET RESEAUX NEURONAUX
 NON-LINEARITE ET RESEAUX NEURONAUX Vêlayoudom MARIMOUTOU Laboratoire d Analyse et de Recherche Economiques Université de Bordeaux IV Avenue. Leon Duguit, 33608 PESSAC, France tel. 05 56 84 85 77 e-mail
NON-LINEARITE ET RESEAUX NEURONAUX Vêlayoudom MARIMOUTOU Laboratoire d Analyse et de Recherche Economiques Université de Bordeaux IV Avenue. Leon Duguit, 33608 PESSAC, France tel. 05 56 84 85 77 e-mail
Tests du χ 2. on accepte H 0 bonne décision erreur de seconde espèce on rejette H 0 erreur de première espèce bonne décision
 Page n 1. Tests du χ 2 une des fonctions des statistiques est de proposer, à partir d observations d un phénomène aléatoire (ou modélisé comme tel) une estimation de la loi de ce phénomène. C est que nous
Page n 1. Tests du χ 2 une des fonctions des statistiques est de proposer, à partir d observations d un phénomène aléatoire (ou modélisé comme tel) une estimation de la loi de ce phénomène. C est que nous
Résumé des communications des Intervenants
 Enseignements de la 1ere semaine (du 01 au 07 décembre 2014) I. Titre du cours : Introduction au calcul stochastique pour la finance Intervenante : Prof. M hamed EDDAHBI Dans le calcul différentiel dit
Enseignements de la 1ere semaine (du 01 au 07 décembre 2014) I. Titre du cours : Introduction au calcul stochastique pour la finance Intervenante : Prof. M hamed EDDAHBI Dans le calcul différentiel dit
Théorie de l estimation et de la décision statistique
 Théorie de l estimation et de la décision statistique Paul Honeine en collaboration avec Régis Lengellé Université de technologie de Troyes 2013-2014 Quelques références Decision and estimation theory
Théorie de l estimation et de la décision statistique Paul Honeine en collaboration avec Régis Lengellé Université de technologie de Troyes 2013-2014 Quelques références Decision and estimation theory
Analyse de la variance Comparaison de plusieurs moyennes
 Analyse de la variance Comparaison de plusieurs moyennes Biostatistique Pr. Nicolas MEYER Laboratoire de Biostatistique et Informatique Médicale Fac. de Médecine de Strasbourg Mars 2011 Plan 1 Introduction
Analyse de la variance Comparaison de plusieurs moyennes Biostatistique Pr. Nicolas MEYER Laboratoire de Biostatistique et Informatique Médicale Fac. de Médecine de Strasbourg Mars 2011 Plan 1 Introduction
chargement d amplitude variable à partir de mesures Application à l approche fiabiliste de la tolérance aux dommages Modélisation stochastique d un d
 Laboratoire de Mécanique et Ingénieriesnieries EA 3867 - FR TIMS / CNRS 2856 ER MPS Modélisation stochastique d un d chargement d amplitude variable à partir de mesures Application à l approche fiabiliste
Laboratoire de Mécanique et Ingénieriesnieries EA 3867 - FR TIMS / CNRS 2856 ER MPS Modélisation stochastique d un d chargement d amplitude variable à partir de mesures Application à l approche fiabiliste
PROBABILITES ET STATISTIQUE I&II
 PROBABILITES ET STATISTIQUE I&II TABLE DES MATIERES CHAPITRE I - COMBINATOIRE ELEMENTAIRE I.1. Rappel des notations de la théorie des ensemble I.1.a. Ensembles et sous-ensembles I.1.b. Diagrammes (dits
PROBABILITES ET STATISTIQUE I&II TABLE DES MATIERES CHAPITRE I - COMBINATOIRE ELEMENTAIRE I.1. Rappel des notations de la théorie des ensemble I.1.a. Ensembles et sous-ensembles I.1.b. Diagrammes (dits
Simulation de variables aléatoires
 Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Chapter 1 Simulation de variables aléatoires Références: [F] Fishman, A first course in Monte Carlo, chap 3. [B] Bouleau, Probabilités de l ingénieur, chap 4. [R] Rubinstein, Simulation and Monte Carlo
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
(51) Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)
 Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)") (19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
(19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Cours de méthodes de scoring
 UNIVERSITE DE CARTHAGE ECOLE SUPERIEURE DE STATISTIQUE ET D ANALYSE DE L INFORMATION Cours de méthodes de scoring Préparé par Hassen MATHLOUTHI Année universitaire 2013-2014 Cours de méthodes de scoring-
UNIVERSITE DE CARTHAGE ECOLE SUPERIEURE DE STATISTIQUE ET D ANALYSE DE L INFORMATION Cours de méthodes de scoring Préparé par Hassen MATHLOUTHI Année universitaire 2013-2014 Cours de méthodes de scoring-
La problématique des tests. Cours V. 7 mars 2008. Comment quantifier la performance d un test? Hypothèses simples et composites
 La problématique des tests Cours V 7 mars 8 Test d hypothèses [Section 6.1] Soit un modèle statistique P θ ; θ Θ} et des hypothèses H : θ Θ H 1 : θ Θ 1 = Θ \ Θ Un test (pur) est une statistique à valeur
La problématique des tests Cours V 7 mars 8 Test d hypothèses [Section 6.1] Soit un modèle statistique P θ ; θ Θ} et des hypothèses H : θ Θ H 1 : θ Θ 1 = Θ \ Θ Un test (pur) est une statistique à valeur
Introduction à la statistique non paramétrique
 Introduction à la statistique non paramétrique Catherine MATIAS CNRS, Laboratoire Statistique & Génome, Évry http://stat.genopole.cnrs.fr/ cmatias Atelier SFDS 27/28 septembre 2012 Partie 2 : Tests non
Introduction à la statistique non paramétrique Catherine MATIAS CNRS, Laboratoire Statistique & Génome, Évry http://stat.genopole.cnrs.fr/ cmatias Atelier SFDS 27/28 septembre 2012 Partie 2 : Tests non
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
Introduction au Data-Mining
 Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Introduction au Data-Mining Gilles Gasso, Stéphane Canu INSA Rouen -Département ASI Laboratoire LITIS 8 septembre 205. Ce cours est librement inspiré du cours DM de Alain Rakotomamonjy Gilles Gasso, Stéphane
Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains
 Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains Andrés Felipe SERNA MORALES Directrice de thèse: Beatriz MARCOTEGUI ITURMENDI serna@cmm.ensmp.fr MINES ParisTech, Mathématiques
Analyse Sémantique de Nuages de Points 3D et d Images dans les Milieux Urbains Andrés Felipe SERNA MORALES Directrice de thèse: Beatriz MARCOTEGUI ITURMENDI serna@cmm.ensmp.fr MINES ParisTech, Mathématiques
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1
 La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
La Licence Mathématiques et Economie-MASS Université de Sciences Sociales de Toulouse 1 La licence Mathématiques et Economie-MASS de l Université des Sciences Sociales de Toulouse propose sur les trois
Health Monitoring pour la Maintenance Prévisionnelle, Modélisation de la Dégradation
 Health Monitoring pour la Maintenance Prévisionnelle, Modélisation de la Dégradation Laurent Denis STATXPERT Journée technologique "Solutions de maintenance prévisionnelle adaptées à la production" FIGEAC,
Health Monitoring pour la Maintenance Prévisionnelle, Modélisation de la Dégradation Laurent Denis STATXPERT Journée technologique "Solutions de maintenance prévisionnelle adaptées à la production" FIGEAC,
Introduction à l étude des Corps Finis
 Introduction à l étude des Corps Finis Robert Rolland (Résumé) 1 Introduction La structure de corps fini intervient dans divers domaines des mathématiques, en particulier dans la théorie de Galois sur
Introduction à l étude des Corps Finis Robert Rolland (Résumé) 1 Introduction La structure de corps fini intervient dans divers domaines des mathématiques, en particulier dans la théorie de Galois sur
UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP250-97157 Pointe-à-Pitre Cedex CONTRAT 2010-2013 LE MASTER NOM DU DOMAINE STS
 UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP20-9717 Pointe-à-Pitre Cedex CONTRAT 2010-201 LE MASTER NOM DU DOMAINE STS Mention : Mathématiques Implantation : Guadeloupe FICHES DESCRIPTIVES
UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP20-9717 Pointe-à-Pitre Cedex CONTRAT 2010-201 LE MASTER NOM DU DOMAINE STS Mention : Mathématiques Implantation : Guadeloupe FICHES DESCRIPTIVES
MODELES DE DUREE DE VIE
 MODELES DE DUREE DE VIE Cours 1 : Introduction I- Contexte et définitions II- Les données III- Caractéristiques d intérêt IV- Evènements non renouvelables/renouvelables (unique/répété) I- Contexte et définitions
MODELES DE DUREE DE VIE Cours 1 : Introduction I- Contexte et définitions II- Les données III- Caractéristiques d intérêt IV- Evènements non renouvelables/renouvelables (unique/répété) I- Contexte et définitions
Introduction à l approche bootstrap
 Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
t 100. = 8 ; le pourcentage de réduction est : 8 % 1 t Le pourcentage d'évolution (appelé aussi taux d'évolution) est le nombre :
 est le nombre :") Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Moments des variables aléatoires réelles
 Chapter 6 Moments des variables aléatoires réelles Sommaire 6.1 Espérance des variables aléatoires réelles................................ 46 6.1.1 Définition et calcul........................................
Chapter 6 Moments des variables aléatoires réelles Sommaire 6.1 Espérance des variables aléatoires réelles................................ 46 6.1.1 Définition et calcul........................................
Chapitre 2 : Systèmes radio mobiles et concepts cellulaires
 Chapitre 2 : Systèmes radio mobiles et concepts cellulaires Systèmes cellulaires Réseaux cellulaires analogiques de 1ère génération : AMPS (USA), NMT(Scandinavie), TACS (RU)... Réseaux numériques de 2ème
Chapitre 2 : Systèmes radio mobiles et concepts cellulaires Systèmes cellulaires Réseaux cellulaires analogiques de 1ère génération : AMPS (USA), NMT(Scandinavie), TACS (RU)... Réseaux numériques de 2ème
Modèles et Méthodes de Réservation
 Modèles et Méthodes de Réservation Petit Cours donné à l Université de Strasbourg en Mai 2003 par Klaus D Schmidt Lehrstuhl für Versicherungsmathematik Technische Universität Dresden D 01062 Dresden E
Modèles et Méthodes de Réservation Petit Cours donné à l Université de Strasbourg en Mai 2003 par Klaus D Schmidt Lehrstuhl für Versicherungsmathematik Technische Universität Dresden D 01062 Dresden E
Object Removal by Exemplar-Based Inpainting
 Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Cours d introduction à la théorie de la détection
 Olivier J.J. MICHEL Département EEA, UNSA v1.mars 06 olivier.michel@unice.fr Laboratoire LUAN UMR6525-CNRS Cours d introduction à la théorie de la détection L ensemble du document s appuie très largement
Olivier J.J. MICHEL Département EEA, UNSA v1.mars 06 olivier.michel@unice.fr Laboratoire LUAN UMR6525-CNRS Cours d introduction à la théorie de la détection L ensemble du document s appuie très largement
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Théorie des probabilités
 Théorie des probabilités LAVOISIER, 2008 LAVOISIER 11, rue Lavoisier 75008 Paris www.hermes-science.com www.lavoisier.fr ISBN 978-2-7462-1720-1 ISSN 1952 2401 Le Code de la propriété intellectuelle n'autorisant,
Théorie des probabilités LAVOISIER, 2008 LAVOISIER 11, rue Lavoisier 75008 Paris www.hermes-science.com www.lavoisier.fr ISBN 978-2-7462-1720-1 ISSN 1952 2401 Le Code de la propriété intellectuelle n'autorisant,
Compression et Transmission des Signaux. Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette
 Compression et Transmission des Signaux Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette 1 De Shannon à Mac Donalds Mac Donalds 1955 Claude Elwood Shannon 1916 2001 Monsieur X 1951 2 Où
Compression et Transmission des Signaux Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette 1 De Shannon à Mac Donalds Mac Donalds 1955 Claude Elwood Shannon 1916 2001 Monsieur X 1951 2 Où
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
Déroulement d un projet en DATA MINING, préparation et analyse des données. Walid AYADI
 1 Déroulement d un projet en DATA MINING, préparation et analyse des données Walid AYADI 2 Les étapes d un projet Choix du sujet - Définition des objectifs Inventaire des données existantes Collecte, nettoyage
1 Déroulement d un projet en DATA MINING, préparation et analyse des données Walid AYADI 2 Les étapes d un projet Choix du sujet - Définition des objectifs Inventaire des données existantes Collecte, nettoyage
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands.
 Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Tests d indépendance en analyse multivariée et tests de normalité dans les modèles ARMA
 Tests d indépendance en analyse multivariée et tests de normalité dans les modèles ARMA Soutenance de doctorat, sous la direction de Pr. Bilodeau, M. et Pr. Ducharme, G. Université de Montréal et Université
Tests d indépendance en analyse multivariée et tests de normalité dans les modèles ARMA Soutenance de doctorat, sous la direction de Pr. Bilodeau, M. et Pr. Ducharme, G. Université de Montréal et Université
Classification non supervisée
 AgroParisTech Classification non supervisée E. Lebarbier, T. Mary-Huard Table des matières 1 Introduction 4 2 Méthodes de partitionnement 5 2.1 Mesures de similarité et de dissimilarité, distances.................
AgroParisTech Classification non supervisée E. Lebarbier, T. Mary-Huard Table des matières 1 Introduction 4 2 Méthodes de partitionnement 5 2.1 Mesures de similarité et de dissimilarité, distances.................
FONDEMENTS MATHÉMATIQUES 12 E ANNÉE. Mathématiques financières
 FONDEMENTS MATHÉMATIQUES 12 E ANNÉE Mathématiques financières A1. Résoudre des problèmes comportant des intérêts composés dans la prise de décisions financières. [C, L, RP, T, V] Résultat d apprentissage
FONDEMENTS MATHÉMATIQUES 12 E ANNÉE Mathématiques financières A1. Résoudre des problèmes comportant des intérêts composés dans la prise de décisions financières. [C, L, RP, T, V] Résultat d apprentissage
PHYSIQUE 2 - Épreuve écrite
 PHYSIQUE - Épreuve écrite WARIN André I. Remarques générales Le sujet de physique de la session 010 comprenait une partie A sur l optique et une partie B sur l électromagnétisme. - La partie A, à caractère
PHYSIQUE - Épreuve écrite WARIN André I. Remarques générales Le sujet de physique de la session 010 comprenait une partie A sur l optique et une partie B sur l électromagnétisme. - La partie A, à caractère
Logiciel XLSTAT version 7.0. 40 rue Damrémont 75018 PARIS
 Logiciel XLSTAT version 7.0 Contact : Addinsoft 40 rue Damrémont 75018 PARIS 2005-2006 Plan Présentation générale du logiciel Statistiques descriptives Histogramme Discrétisation Tableau de contingence
Logiciel XLSTAT version 7.0 Contact : Addinsoft 40 rue Damrémont 75018 PARIS 2005-2006 Plan Présentation générale du logiciel Statistiques descriptives Histogramme Discrétisation Tableau de contingence
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M belayach@fsr.ac.ma 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M belayach@fsr.ac.ma 1 1.Le réseau
Le Modèle Linéaire par l exemple :
 Publications du Laboratoire de Statistique et Probabilités Le Modèle Linéaire par l exemple : Régression, Analyse de la Variance,... Jean-Marc Azaïs et Jean-Marc Bardet Laboratoire de Statistique et Probabilités
Publications du Laboratoire de Statistique et Probabilités Le Modèle Linéaire par l exemple : Régression, Analyse de la Variance,... Jean-Marc Azaïs et Jean-Marc Bardet Laboratoire de Statistique et Probabilités
Classe de première L
 Classe de première L Orientations générales Pour bon nombre d élèves qui s orientent en série L, la classe de première sera une fin d étude en mathématiques au lycée. On a donc voulu ici assurer à tous
Classe de première L Orientations générales Pour bon nombre d élèves qui s orientent en série L, la classe de première sera une fin d étude en mathématiques au lycée. On a donc voulu ici assurer à tous
Une comparaison de méthodes de discrimination des masses de véhicules automobiles
 p.1/34 Une comparaison de méthodes de discrimination des masses de véhicules automobiles A. Rakotomamonjy, R. Le Riche et D. Gualandris INSA de Rouen / CNRS 1884 et SMS / PSA Enquêtes en clientèle dans
p.1/34 Une comparaison de méthodes de discrimination des masses de véhicules automobiles A. Rakotomamonjy, R. Le Riche et D. Gualandris INSA de Rouen / CNRS 1884 et SMS / PSA Enquêtes en clientèle dans
Estimation et tests statistiques, TD 5. Solutions
 ISTIL, Tronc commun de première année Introduction aux méthodes probabilistes et statistiques, 2008 2009 Estimation et tests statistiques, TD 5. Solutions Exercice 1 Dans un centre avicole, des études
ISTIL, Tronc commun de première année Introduction aux méthodes probabilistes et statistiques, 2008 2009 Estimation et tests statistiques, TD 5. Solutions Exercice 1 Dans un centre avicole, des études
Théorie et Codage de l Information (IF01) exercices 2013-2014. Paul Honeine Université de technologie de Troyes France
 exercices 2013-2014. Paul Honeine Université de technologie de Troyes France") Théorie et Codage de l Information (IF01) exercices 2013-2014 Paul Honeine Université de technologie de Troyes France TD-1 Rappels de calculs de probabilités Exercice 1. On dispose d un jeu de 52 cartes
Théorie et Codage de l Information (IF01) exercices 2013-2014 Paul Honeine Université de technologie de Troyes France TD-1 Rappels de calculs de probabilités Exercice 1. On dispose d un jeu de 52 cartes
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Vérification audiovisuelle de l identité
 Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
La nouvelle planification de l échantillonnage
 La nouvelle planification de l échantillonnage Pierre-Arnaud Pendoli Division Sondages Plan de la présentation Rappel sur le Recensement de la population (RP) en continu Description de la base de sondage
La nouvelle planification de l échantillonnage Pierre-Arnaud Pendoli Division Sondages Plan de la présentation Rappel sur le Recensement de la population (RP) en continu Description de la base de sondage
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
M2 IAD UE MODE Notes de cours (3)
") M2 IAD UE MODE Notes de cours (3) Jean-Yves Jaffray Patrice Perny 16 mars 2006 ATTITUDE PAR RAPPORT AU RISQUE 1 Attitude par rapport au risque Nousn avons pas encore fait d hypothèse sur la structure de
M2 IAD UE MODE Notes de cours (3) Jean-Yves Jaffray Patrice Perny 16 mars 2006 ATTITUDE PAR RAPPORT AU RISQUE 1 Attitude par rapport au risque Nousn avons pas encore fait d hypothèse sur la structure de
Modèles à Événements Discrets. Réseaux de Petri Stochastiques
 Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés
Modèles à Événements Discrets Réseaux de Petri Stochastiques Table des matières 1 Chaînes de Markov Définition formelle Idée générale Discrete Time Markov Chains Continuous Time Markov Chains Propriétés