CONCOURS COMMUNS POLYTECHNIQUES
|
|
|
- Danielle Gignac
- il y a 9 ans
- Total affichages :
Transcription

1 CONCOURS COMMUNS POLYTECHNIQUES

2 SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés possèdent des centres de maintenance ayant en charge l entretien et la réparation de leurs véhicules. Parmi ces véhicules, on peut trouver des tramways de deux types : sur rails ou sur pneus. On s'intéresse ici à la maintenance de tramways sur rails de type TFS (Tramway Français Standard) : voir Annexe 1 photo 1. Les rames TFS sont dotées d'un plancher bas, à 35 cm au-dessus du sol, sur les 3/4 de leur longueur. Dans le cadre d une opération de maintenance, il est nécessaire d intervenir sous le tramway et donc de le soulever entièrement. Problématique : comment soulever une rame de tramway de 45 tonnes et de 30 mètres de long à une hauteur suffisante (de l'ordre de 1m70) pour réaliser la maintenance des boggies et divers matériels se trouvant sous le tramway? Le système de levage est constitué d une armoire de commande (nommée PC) munie d un pupitre de commande, d un API (Automate Programmable Industriel), de relais et cartes de commande pour moteurs. Cette PC peut gérer jusqu à 10 colonnes de levage. Ces colonnes de levage (voir Annexe 1photos 2 à 6) sont des unités indépendantes mobiles que l on peut déplacer manuellement grâce à des roues escamotables. Elles sont constituées d un chariot de levage (voir Modèle numérique de la colonne en Annexe 1) guidé par 4 galets roulant à l intérieur d une colonne (rails en tôle pliée). L entraînement du chariot se fait par une vis à filet trapézoïdal (voir Annexe 1 photo 6), mise en rotation par un moto-réducteur-frein asynchrone. On met en place les colonnes au niveau de la plateforme du tramway à soulever, aux endroits prévus à cet effet. Pour soulever un tramway de 45 tonnes et de 30 mètres de long, le service de maintenance utilise 8 colonnes de levage d'une capacité unitaire maximale de 8,2 tonnes commandées simultanément (voir Annexe 1 photos 2 à 5). Lorsque les colonnes sont en place, on démarre le cycle de levage : l opérateur peut choisir un fonctionnement manuel ou automatique. En mode automatique, on affiche sur le pupitre la consigne de hauteur à atteindre, la PC pilote alors chaque moteur des 8 colonnes jusqu à ce que cette hauteur soit atteinte. Chaque colonne est équipée d un codeur incrémental informant la PC de la position du chariot de levage de la colonne. Pour un fonctionnement en toute sécurité, il faut assurer une certaine horizontalité du tramway soulevé : l'ensemble des points de levage doit être compris entre deux plans parallèles distants de 20 mm au maximum (coplanéité).
 : voir Annexe 1 photo 1.")


3 DIAGRAMME PARTIEL DES INTER-ACTEURS EN PHASE D UTILISATION MONTÉE-DESCENTE FONCTIONS DE SERVICE F.P.1 : PERMETTRE À UN OPÉRATEUR DE SOULEVER UN TRAMWAY DU SOL GRÂCE À DE L ÉNERGIE ÉLECTRIQUE F.C.1 : S ADAPTER À LA PLATEFORME DU TRAMWAY F.C.2 : ÊTRE STABLE MÉCANIQUEMENT F.C.3 : ÊTRE ALIMENTÉ F.C.4 : ASSURER LA SÉCURITÉ DE L'OPÉRATEUR CRITÈRES HAUTEUR MAXI VITESSE MAXI CHARGE MAXI COPLANÉITÉ DES POINTS DE LEVAGE SURFACE D APPUI AU CONTACT DE LA PLATEFORME SURFACE D'APPUI AU SOL RÉSISTANCE MÉCANIQUE DU SOL (pression de contact maxi) TENSION DE PUISSANCE TENSION DE COMMANDE VITESSE DE DESCENTE HORS ÉNERGIE NIVEAUX Pour UNE colonne 1700 mm 10 mm/s 8,2 tonnes Écart maximum de 20 mm 140 x 140 mm 2 2 pieds de 600 x 200 mm 2 P adm = 8 MPa V alternative, Hz 24 V continu Nulle

4 Le développement sous forme de FAST de la fonction principale F.P.1 (plus simplement écrite «Soulever un tramway») est donné ci-après : SOULEVER UN TRAMWAY ALIMENTER EN ENERGIE RELIER AU RÉSEAU ÉLECTRIQUE câbles ACQUÉRIR LES INFORMATIONS codeur incrémental + génératrice tachymétrique GÉRER L'ENSEMBLE DES COLONNES A.P.I. et/ou carte P.I.D. COMMUNIQUER AVEC L'OPERATEUR pupitre de commande DÉPLACER EN TRANSLATION 8 colonnes de levage Le développement sous forme de FAST de la fonction technique «Déplacer en translation» pour une colonne est donné ci-après : ALIMENTER EN ÉNERGIE réseau EDF DÉPLACER EN TRANSLATION DISTRIBUER L'ENERGIE ELECTRIQUE carte de puissance à relais CONVERTIR L'ENERGIE moteur asynchrone ADAPTER L'ENERGIE MECANIQUE réducteur à engrenages TRANSFORMER LE MOUVEMENT vis + écrou GUIDER EN TRANSLATION chariot à galets + rail de guidage

5 Afin de vérifier les performances du système, on propose le plan d étude suivant : Analyse du système de levage : question Q1 A Vérification de quelques critères de la F.P.1 : soulever un tramway A1 - Vérification du critère de charge maximale : questions Q2 et Q3 A2 - Dimensionnement du moteur électrique : questions Q4 à Q8 B Vérification du critère de la F.C.2 : être stable mécaniquement B1 - Vérification du critère de non basculement (stabilité mécanique) : question Q9 B2 - Vérification du critère de pression maximale au sol : question Q10 C Étude du critère de coplanéité C1 - Justification du pilotage des moteurs (F.C.1) : question Q11 C2 - Étude (partielle) d un modèle de commande séquentielle (F.C.1) : questions Q12 à Q16 C3 - Étude (partielle) d un modèle de commande continue (F.P.1 et F.C.1) : questions Q17 à Q21 Il sera tenu compte de la présentation. ANALYSE DU SYSTÈME DE LEVAGE Q1 : a - Compléter sur le document réponse DR1 le diagramme représentant l architecture de la chaîne d information et de la chaîne d énergie du système de levage étudié. b - Compléter sur le document réponse DR2 le schéma cinématique minimal 3D d une colonne de levage. A Vérification de quelques critères de la F.P.1 : soulever un tramway A1 - Vérification du critère de charge maximale Objectif : déterminer la valeur de la charge soulevée par chaque colonne. On rappelle que pour soulever une rame complète de tramway, on utilise 8 colonnes, soit 4 colonnes réparties identiquement de chaque côté du tramway. Le tramway est un véhicule articulé constitué de six éléments (voir Annexe 2 figure 1) ayant des masses différentes. Ainsi, chaque colonne ne soulèvera pas la même charge. L étude suivante consiste à déterminer la charge soulevée par chaque colonne, donnée essentielle à connaître afin de régler les paramètres de commande de ces unités de levage.
 : question Q11 C2 - Étude (partielle) d un modèle de commande séquentielle (F.C.1) : questions Q12 à Q16 C3 - Étude (partielle) d un modèle de commande continue (F.")
6 Modèle retenu : (voir impérativement la figure 2 de l Annexe 2). 1. Système isolé : tramway complet. 2. Le plan étant plan de symétrie pour les efforts et la géométrie, on se limite à une étude plane. Le vecteur unitaire est vers l arrière du dessin. 3. Les diverses actions mécaniques dues à la pesanteur (on prendra g = 9,81 m/s 2 ) sont modélisées par des glisseurs de résultantes =. aux centres de gravité des six éléments différents. 4. Les actions mécaniques dues aux colonnes de levage sont modélisées par des glisseurs de résultantes =. aux points de levage L 1, L 2, L 3 et L Les voitures motrices V1 et V2 sont articulées (liaisons sphériques) respectivement aux points A 1 et A 2 avec la voiture d'articulation centrale V3. 6. L'action mécanique due à une articulation entre deux voitures i et j sera modélisée par un glisseur de résultante au centre de l articulation. Données géométriques : Nota Bene : Le plan étant aussi plan de symétrie pour les efforts et la géométrie, on se limite à l étude des deux voitures (avec leurs boggies) {V1,Bm1} et {V3,Bp3}. Q2 : Q3 : Dessiner sur le document réponse DR2 les vecteurs représentant les actions mécaniques extérieures (en phase de levage) agissant sur les deux voitures isolées (avec boggies) {V1,Bm1} et {V3,Bp3} en respectant directions et sens. Exprimer les actions mécaniques des colonnes de levage en L 1 et L 2, en fonction des grandeurs géométriques et des poids des différents éléments du tramway. Calculer ces actions mécaniques. (Chacune de ces actions est supportée identiquement par deux colonnes). A2 - Dimensionnement du moteur électrique Objectif : valider le dimensionnement du moteur (couple, vitesse, puissance) en régime nominal et en phase d accélération. L objectif est de valider que le moteur proposé correspond aux impératifs de couple et de vitesse imposés par le cahier des charges. Les éléments importants à respecter sont : - «la masse maximale à soulever est de 6 tonnes, soit 6000 kg, inférieure à la capacité maximale». - «la vitesse de levée doit être de 10 mm/s, soit 0,010 m/s». - «la phase d accélération ne doit pas excéder 0,5 s».
 respectivement aux points A 1 et A 2 avec la voiture d'articulation centrale V3. 6.")
7 Lors de la conception, plusieurs technologies ont été étudiées, que ce soit au niveau de la motorisation ou de la commande (étudiée dans la partie C). La solution retenue concernant la chaîne de transmission de puissance est décrite en Annexe 2 sur les figures 3 et 4 qui présentent le modèle d étude utilisé et certaines données techniques. Le moteur choisi est un moteur asynchrone de type LS100L, d une puissance de 2,2 kw, équipé d un frein FCR J02 (voir Annexe 2 figure 5). Q4 : Compte tenu du paramétrage on peut écrire :. a - Exprimer de manière littérale, en fonction du paramètre θ 1, et des données concernant les roues dentées et le système vis-écrou, les vecteurs vitesse de rotation et la vitesse de levée. Déterminer numériquement les rapports entre les vitesses,, et ( les vitesses de rotation étant exprimées en rad/s et la vitesse linéaire en m/s). Quelle que soit la valeur trouvée pour r g, la valeur utilisée dans la suite du sujet sera :. b - Déterminer la vitesse de rotation du moteur souhaitée (à exprimer en tr/min) conformément au cahier des charges. Conclure en comparant la valeur trouvée avec la vitesse nominale du moteur (voir Annexe 2 figure 5). Q5 : L énergie cinétique d un solide S i en mouvement par rapport à un repère R j sera notée T i/j. a - Déterminer les expressions littérales des énergies cinétiques des différents solides du système S (arbre 1, arbre 2, vis 3, chariot 4, masse 5) en mouvement par rapport au repère galiléen R 0, en fonction des données cinétiques fournies (voir Annexe 2 figure 4), des rapports r ij et du paramètre θ 1. b - Montrer, en vous appuyant sur les valeurs numériques proposées, que les énergies cinétiques des solides 2, 3, 4 et 5 sont négligeables devant l énergie cinétique du solide 1. c - Déterminer littéralement et numériquement le rendement global du système, noté η g, en fonction des différents rendements. d - Déterminer l expression de la puissance perdue dans les liaisons en fonction de la puissance motrice P m et du rendement globalη g. Dans la suite du problème, on négligera les énergies cinétiques des solides 2, 3, 4 et 5 devant l énergie cinétique du solide 1 et l influence de la masse M 4 (21,7 kg) devant la masse M 5 (6000 kg). La valeur de l accélération de la pesanteur g sera prise égale à 9,81 m/s 2.

8 Q6 : Déterminer l expression littérale du couple moteur C m en fonction de θ 1. Q7 : Phase de montée à vitesse constante a - Déterminer l expression de C m et sa valeur numérique lors d une montée à vitesse constante. b - Comparer cette valeur avec celle du «moment nominal M N» fournie dans la documentation du moteur (voir Annexe 2 figure 5). c - Quelle serait alors la vitesse de rotation du moteur (exprimée en tr/min) et la vitesse de levée (exprimée en m/s)? Conclure quant à la pertinence du choix du moteur pour cette phase. Q8 : Phase de démarrage Lors de la phase de démarrage, on peut admettre que le couple moteur a la valeur du «moment de démarrage M D» donnée par la documentation (voir Annexe 2 figure 5, qui donne la valeur du rapport entre le moment de démarrage M D et le moment nominal M N ). a - Déterminer, lors de la phase de démarrage, la relation numérique entre le couple C m et l accélération angulaire de l arbre moteur (exprimée en rad/s 2 ). b - Déterminer la durée de la phase d accélération. Conclure quant à la pertinence du choix du moteur pour cette phase. B Vérification du critère de la F.C.2 : être stable mécaniquement B1 - Vérification du critère de non-basculement (stabilité mécanique) Objectif : vérifier le NON-BASCULEMENT d une colonne dans le plan yoz. La stabilité mécanique de la colonne doit être assurée, quelle que soit la charge à soulever, afin de respecter la fonction complémentaire F.C.2. Le modèle retenu pour cette étude est le suivant : (Voir Annexe 2 figures 6 et 7). 1. Système isolé : colonne entière. 2. Le plan yoz est plan de symétrie pour les efforts et la géométrie. 3. Le poids des éléments de la colonne est négligé par rapport à la charge à soulever. 4. L action de contact sol/colonne est modélisée par une répartition de pression q(y) variant linéairement entre q 1 et q 2 pour y [e, e + L], et restant uniforme selon x, comme indiqué sur les figures 6 et 7. L'unité de q(y) est le MPa. La charge à soulever est modélisée par un glisseur dont le support passe par le point P situé à la distance d de l axe Oz de la vis du chariot.
 et la vitesse de levée (exprimée en m/s)? Conclure quant à la pertinence du choix du moteur pour cette phase.")
9 Q9 : Déterminer, sans faire de calculs, les 2 valeurs extrêmes d min et d max que peut prendre la distance d, garantissant la stabilité de la colonne dans le plan yoz. Justifier. B2 - Vérification du critère de pression maximale au sol Objectif : vérifier le critère P adm de non dépassement de la résistance mécanique du sol. Données géométriques : L = 600 mm ; b = 200 mm ; d = 480 mm ; e = 110 mm Charge à soulever : F T C = N Q10 : Par application du principe fondamental de la statique à la colonne en O défini par, déterminer la valeur de la pression de contact maximale P max entre les pieds et le sol. Conclure. Nota Bene : pour l application du théorème du moment statique en O, seule la projection sur l axe est utile pour cette étude de basculement dans le plan yoz. C Étude du critère de coplanéité C1 - Justification du pilotage des moteurs (F.C.1) Objectif : justifier la nécessité de piloter la commande du moteur au cours du mouvement. La masse soulevée par chaque colonne varie en fonction du point de levage. Le couple moteur sera donc différent d une colonne à l autre, d autant que les rendements peuvent être aussi différents d une colonne à l autre, car les conditions de fonctionnement ne sont pas identiques. Une étude plus complète et une série de mesures permettent d estimer les couples moteurs extrêmes : pour la colonne la plus sollicitée (que l on désignera par C 1 ) le couple moteur a pour valeur 14,5 N.m et pour la colonne la moins sollicitée (que l on désignera par C 2 ) le couple moteur a pour valeur 7 N.m. Ces différences de couples vont engendrer des différences de vitesses car, sans mode de pilotage spécifique, la vitesse de rotation du moteur est liée au couple (voir Annexe 2 figure 5). Or, une des conditions du cahier des charges portant sur l écart maximal de hauteur qui doit exister entre 2 points de levage quelconques au cours du mouvement, se traduit par le fait qu il ne doit pas exister un écart supérieur à 10 mm entre 2 colonnes.

10 Lorsque cet écart atteint cette valeur, et sans pilotage particulier des moteurs, il convient d arrêter la colonne qui est «en avance», tout en laissant continuer la colonne «en retard». Un certain nombre d arrêts et de démarrages vont être demandés au moteur de la colonne qui est «en avance». Or, les démarrages consomment beaucoup d énergie et les moteurs classiques ne peuvent supporter trop de démarrages dans un temps réduit. Le nombre de démarrages du moteur proposé ne doit pas être supérieur à un démarrage par minute, afin que sa durée de vie soit satisfaisante. Q11 : a - A partir de la courbe caractéristique couple/vitesse fournie Annexe 2 figure 5, déterminer les vitesses de rotation des moteurs des colonnes C 1 et C 2 (exprimées en tr/min) et les vitesses de levée des colonnes C 1 et C 2 (exprimées en m/s). b - Déterminer pour quelle hauteur, et au bout de combien de temps, l écart de position serait égal à la valeur autorisée par le cahier des charges. Quel est le nombre de démarrages qui correspond à une hauteur maximale de levée de 1,5 m. Conclure. C2 et C3 Étude de la commande du système Objectifs : satisfaire au critère de vitesse de la fonction F.P.1, et au critère de coplanéité des points de levage de la fonction F.C.1. L étude proposée est simplifiée : la prise en compte de la sécurité est très partielle et la commande des moteurs n est pas détaillée (commande du frein, démarrage, protection thermique). Problématique : comment garantir un écart maximum entre deux points de levage sachant que : - l étude statique montre que les charges sont différentes sur les colonnes de levage, ce qui implique des différences de vitesse, et donc des écarts de position au cours du mouvement ; - les tolérances sur les différents composants constitutifs et des conditions de lubrification différentes impliquent des comportements légèrement différents des colonnes. Le système existe dans deux versions : - l une, pilotée en logique séquentielle, bien adaptée aux structures complexes, mais qui conduit à des arrêts et démarrages fréquents des moteurs et donc à un risque pour les moteurs et à une surconsommation d énergie ; - l autre, à commande asservie, qui conduit à une structure complexe pour la commande simultanée de l ensemble des moteurs, mais qui évite les arrêts et démarrages fréquents. Éléments du cahier des charges (certaines valeurs sont différentes de celles retenues pour les études précédentes) L étude est conduite pour des rames d une longueur de 30 m et une masse de 45 tonnes, comportant 3 tronçons ce qui implique l utilisation simultanée de 8 unités de levage. La charge par unité est comprise entre 5,2 et 6 tonnes. Le temps de levage doit être d environ 3 minutes pour 1500 mm.

11 Deux modes de marche sont prévus : - marche automatique pour atteindre des positions prédéfinies correspondant à des opérations d entretien particulières, changement de boggies par exemple ; - marche manuelle pour un positionnement à la demande. Pour ce mode de marche, les alternances «marche-arrêt» étant fréquentes, il est possible d envisager une commande en trapèze de vitesse pour éviter les secousses et ménager les moteurs. Étant donné le faible rotulage possible dans les liaisons entre les différents tronçons du tramway, l ensemble des niveaux des colonnes doit constamment être compris entre deux plans distants de 20 mm. La sécurité du personnel doit être maximale et les risques d endommager le matériel doivent être minimisés. La sécurité est gérée globalement au niveau du grafcet de surveillance. Indépendamment du mode de commande, pour réaliser l iso-nivelage, il faut comparer entre eux les niveaux atteints par chaque colonne. Plusieurs méthodes pour obtenir ce résultat sont possibles : - comparer en temps réel les niveaux de l ensemble des colonnes pour limiter la vitesse ou arrêter les moteurs des unités dont le niveau dépasse d une certaine valeur, celle de l unité la plus basse. - comparer les niveaux des colonnes deux à deux : o soit en boucle ; o soit en étoile, en utilisant une colonne comme référence. Comparaison en boucle Comparaison en étoile par rapport à l unité 1 La première méthode nécessite l utilisation de modèles de commande plus complexes que la deuxième. La deuxième méthode autorise un écart plus important entre deux colonnes, et permet éventuellement de l individualiser. C est cette deuxième méthode qui a été retenue par le fabricant. Q12 : Proposer un écart de hauteur maximum (entre deux colonnes comparées) pour la structure en étoile afin de respecter le cahier des charges.

12 Pour des raisons de sécurité, on prendra pour la suite un écart maximum de 5 mm, et les études porteront sur la structure en étoile, plus simple. C2 Étude (partielle) d un modèle de commande séquentielle (F.C.1) Cette étude porte sur une structure en étoile : Les colonnes sont numérotées de 1 à 8 et l unité numérotée 1 est prise comme référence. L écart de niveau entre la colonne 1 et chacune des autres colonnes devra rester inférieur à 5 mm. Le pupitre de commande comporte notamment (les variables binaires associées sont entre parenthèses) : - un arrêt d urgence (arup) ; - un sélecteur à 3 positions, la valeur 1 ne peut être assignée qu à une seule des 3 variables : o mode automatique (aut), o mode manuel (man), o mise en référence des unités (ref) ; - un sélecteur montée-descente (mont, desc) : la valeur 1 ne peut être assignée aux deux variables simultanément ; - un bouton poussoir de marche (m) qui sert soit au départ d un cycle automatique, soit à la commande manuelle de montée-descente, soit au départ de la mise en référence. Les colonnes sont équipées (les variables binaires associées sont entre parenthèses) : - d un moteur-frein asynchrone triphasé car il faut deux sens de marche (Mi+ pour monter et Mi- pour descendre) ; - de capteurs de fin de course haut (fch i ) et bas (fcb i ) ; - d un capteur incrémental (c i ) ; - d un capteur d effort (ef i ) ; - d un bouton d arrêt d urgence (aru i ). Description du fonctionnement : Avant le soulèvement d une rame, l ensemble des unités doit être mis en référence. Pour cela, on installe les huit colonnes aux endroits prévus. Les becs d appui de toutes les colonnes sont mis en contact avec les points de soulèvement de la rame. La mise en référence est obtenue dès que les huit variables binaires ef i prennent la valeur 1 (Voir Annexe 2 figure 8, le grafcet de mise en référence GR). Dans le cas de huit colonnes, structure en étoile, il est nécessaire d avoir huit compteurs : un pour une information de niveau de la colonne 1, et sept pour les comparaisons de niveaux des autres colonnes. Pour les niveaux, huit capteurs incrémentaux fournissent des informations c i, où i est le numéro de la colonne. Chaque front montant de c i (noté c i ) indique une variation de niveau de 1 mm.
 : - un arrêt d urgence (arup) ; - un sélecteur à 3 positions, la valeur 1 ne peut être assignée qu")
13 Le capteur c 1 permet, à chaque front montant, d incrémenter (à la montée) ou de décrémenter (à la descente) le compteur N 1 qui indique la hauteur atteinte par la colonne 1 servant de référence : on notera h la hauteur à atteindre en mode automatique. Le «compteur-décompteur» N 2 donne une indication sur la hauteur atteinte par la colonne 2 par rapport à la colonne 1 servant de référence. Il est incrémenté par les fronts montants du capteur c 1 et décrémenté par les fronts montants du capteur c 2. Les compteurs-décompteurs N 3 à N 8 suivent des règles semblables à celles du compteur-décompteur N 2. A l issue de la phase de mise en référence (voir Annexe 2 figure 8, grafcet GR), la valeur 0 est affectée au compteur N 1, et la valeur 5 à tous les autres compteurs N i. Les colonnes sont dites en «position initiale». Un grafcet annexe non représenté permet, quand le sélecteur montée-descente change d état, d affecter la valeur 10-N i au compteur N i (i variant de 2 à 8). A la montée comme à la descente, si le niveau de la colonne i est «en avance» de 5 mm par rapport à celui de la colonne 1, le moteur de la colonne i correspondante doit s arrêter : il redémarre quand la colonne 1 est à la hauteur de la colonne i. De même, si le niveau de la colonne 1 est «en avance» de 5 mm par rapport à celui d une colonne i, le moteur de la colonne 1 doit s arrêter : il redémarre quand les colonnes i sont toutes au moins à la hauteur de la colonne 1. En mode automatique, lorsque le compteur N 1 atteint la valeur h, l ensemble des colonnes doit s arrêter. Lorsqu un capteur de fin de course (haut ou bas) est atteint, la colonne correspondante doit s arrêter. Le grafcet GR de mise en référence et les grafcets GM2 et GM1 de commande des moteurs des colonnes 2 et 1 sont donnés en Annexe 2, figures 8, 9 et 10. Les arrêts d urgence seront gérés à partir d une encapsulation générale qui n est pas mise en place dans les différents grafcets présentés. L étude se limite au couple «colonne 1, colonne 2». Pour tous les autres couples «colonne 1, colonne i» les grafcets seraient semblables. Pour cette étude, toutes les réponses devront respecter la norme en vigueur. Q13 : Sur le document réponse DR3 : a - Compléter le grafcet GC2 du compteur N 2. b - Proposer un grafcet GC1 pour le compteur N 1. Q14 : A partir des informations délivrées uniquement par le compteur N 2 : a - Exprimer les conditions A et B du grafcet GM2 de commande du moteur M2 (Annexe 2 figure 9). b - Exprimer les conditions D et E du grafcet GM1 de commande du moteur M1 (Annexe 2 figure 10), sans tenir compte des colonnes 3 à 8.

14 Pour limiter certains risques, en mode manuel si le bouton m n est pas sollicité pendant plus de 30 secondes, le système se met en sécurité, et il ne pourra fonctionner de nouveau qu après un réarmement (à clef) noté rm. Pour ne pas rendre le grafcet GM2 illisible, on opte pour une solution utilisant le forçage d étape du grafcet GM2 à l étape 200. Q15 : Sur le document réponse DR3, exprimer sur le grafcet GS de mise en sécurité, les éléments indiqués par un point d interrogation. Pour simplifier la gestion des arrêts d urgence, il semble judicieux d utiliser une encapsulation, l étape 1100 étant encapsulante, et d utiliser un grafcet GARU qui, en forçant l étape 1100, permet d arrêter et de redémarrer le système. Q16 : Sur le document réponse DR4, mettre en place sur les grafcets GR (partiel),gc2 et GM2, tous les éléments graphiques permettant de décrire les encapsulations des grafcets GC2 et GM2 par l étape encapsulante 1100, le fonctionnement global restant identique au précédent. Les réceptivités A, B, C, r 20-21, r ne seront pas explicitées. C3 - Étude (partielle) d un modèle de commande continue (F.P.1 et F.C.1) Objectif : déterminer la valeur de certains paramètres de la chaîne asservie pour obtenir la vitesse de montée du cahier des charges (critère de F.P.1), et pour le critère de coplanéité (iso-nivelage) de la fonction F.C.1. On donne le schéma-bloc de l asservissement d une colonne en Annexe 2 figure 11. La commande peut se faire, soit en position (mode automatique), soit en vitesse (mode manuel) par le commutateur position/vitesse (voir Annexe 2 figure 11). Un seul des deux modes est possible. La commutation entre les modes de fonctionnement se fait au niveau du pupitre de commande. Première étude, Q17 à Q19 : détermination de la tension U sat permettant d obtenir une vitesse de montée de 10 mm/s pour une colonne supportant une charge moyenne. Hypothèses : - les correcteurs C 1 et C 2 seront pris égaux à 1 ; - la charge maximale par unité est de 6 tonnes, la charge minimale est de 5,2 tonnes ; - pour la charge moyenne de 5,6 tonnes, la vitesse de montée doit être de 10 mm/s ; - U sat et C r sont considérés comme des échelons. L étude est conduite pour la montée, la tension d alimentation du moteur étant limitée à U sat. En avant-projet, il est possible de travailler (Q17 à Q19) uniquement sur le schéma partiel donné Annexe 2 figure 12. Ce schéma modélise le fonctionnement, non asservi, du moteur électrique à courant continu, actionneur de la chaîne asservie, avec une charge extérieure représentée par C r.

15 Valeurs numériques : R = 3 ; L = 0,03 H ; K m = 1,4 Nm/A ; J = 0,02 kg.m 2 ; Q17 : cas où C r = 0. f v = 0,012 Nm/(rad/s) ; K e = 1,4 V/(rad/s) ; K v = 1 ; λ = 0, (m/s)/(rad/s) a - Déterminer la fonction de transfert et la mettre sous forme canonique. b - Déterminer l expression de la valeur finale de la vitesse V s en réponse à un échelon U sat (t) d amplitude U sat-vide. c - En déduire la valeur de U sat-vide pour obtenir une vitesse V s = 10 mm/s. Q18 : cas où U sat = 0. a - Déterminer la fonction de transfert et la mettre sous forme canonique. b - Déterminer l expression de la valeur finale de la vitesse V s en réponse à un échelon C r (t) d amplitude C r. c - Effectuer l application numérique pour C r = 12 Nm. Q19 : cas où U sat 0 et C r = 12 Nm. a - Déterminer la valeur de l amplitude de l échelon U sat, noté U sat-charge, afin de compenser l effet de la perturbation C r (t). b - Effectuer l application numérique. c - Justifier qu un correcteur proportionnel-intégral système précis, en boucle fermée. 1 K.(1+ i ) T. p i permettrait d avoir un Deuxième étude, Q20 et Q21 : détermination du gain K permettant de coupler les commandes d une paire de colonnes dans une structure en étoile. Même si en régime permanent les vitesses de consigne seront effectivement atteintes, il y a un risque au niveau du régime transitoire d avoir une différence de position de plus de 5 mm entre les hauteurs des colonnes : il est donc nécessaire de contrôler l écart de position entre les colonnes. Le schéma simplifié de l asservissement pour la commande en vitesse d une paire de colonnes dans une structure en étoile, est donné en Annexe 2 figure 13. La compréhension de ce schéma n est pas indispensable pour traiter les questions, il permet uniquement de présenter la structure fonctionnelle envisagée pour la commande asservie d une paire de colonnes. L étude sera conduite pour une commande en vitesse, le schéma simplifié étant donné en Annexe 2 figure 14, entre la colonne 1 et la colonne 2. La sortie considérée est ε 12.

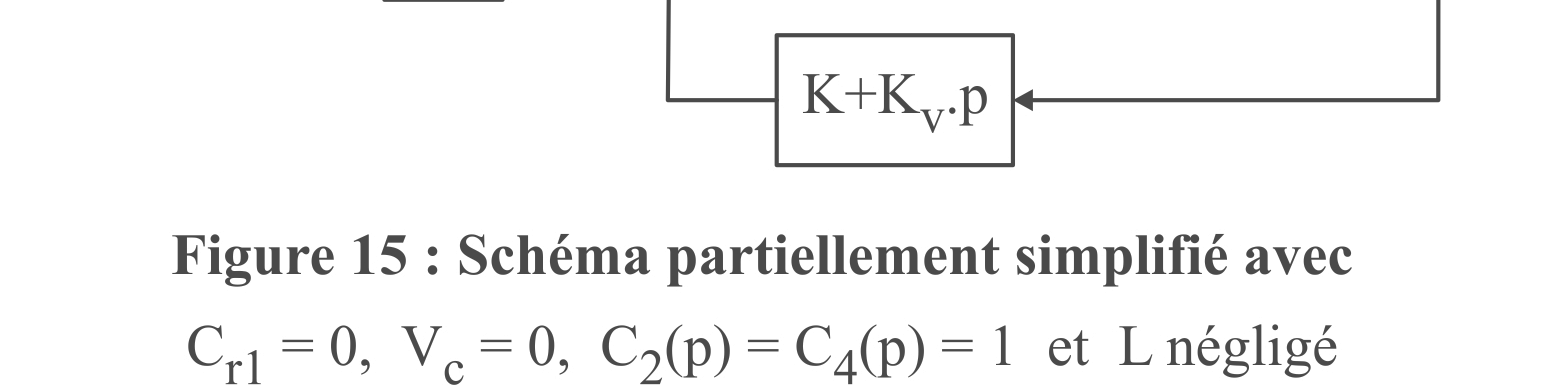
16 Q20 : Justifier pourquoi un correcteur proportionnel-intégral ne pourrait pas convenir dans ce cas précis. Hypothèses : - C 2 (p) et C 4 (p) sont toujours considérés comme unitaires, et on prendra aussi K v = 1. - l inductance des moteurs est négligée. - C r1 et C r2 sont supposés être en échelon. - les deux colonnes sont considérées identiques. On note C r la différence de moment extérieur, ramenée sur l arbre moteur, correspondant à la différence de charge entre la colonne 1 et la colonne 2. Pour une différence de charge de 800 kg, avec une petite majoration par sécurité : C r = 2 Nm. Pour C r2 = 0 et V c = 0, on obtient compte-tenu des hypothèses : ε 12-1 ( p) = λrcr1( p) prf+ Jp+ K K+ K + λkk [ ( ) ( λ )] v m e v m Q21 : Pour C r1 = 0 et V c = 0, on obtient le schéma partiellement simplifié donné en Annexe 2 figure 15 (avec L négligé et C 2 (p) = C 4 (p) = 1). a - Déterminer l expression de ε 12-2 (p) en fonction de C r2 (p) (avec C r1 = 0 et V c = 0). b - L écart de position entre les deux colonnes est : ε 12 (t) = ε 12-1 (t) + ε 12-2 (t). Quelle doit être la valeur de K pour que ε 12 (t) reste inférieure à 5 mm pour C r = 2 Nm? FIN DE L ÉNONCÉ








17 ANNEXES Annexe 1 : Photos 1 à 6 Photo 1 : TFS = Tramway Français Standard Photo Legrand - Wikipédia Photo 2 : Colonne de levage Modèle numérique de la colonne 1/12









18 Photo 3 : Mise en place d'une colonne Photo 4 : Colonne d'extrémité en phase de levage Photo 5 : Tramway en position soulevée Photo 6 : Vis d'entraînement 2/12


")
19 Annexe 2 : Figures et données géométriques Tramway de masse totale 44,6 tonnes Bm1 et Bm2 : boggies moteurs de masse 5,9 tonnes chacun Bp3 : boggie porteur de masse 4,3 tonnes V1 et V2 : voitures motrices de masse 12,7 tonnes chacune (sans boggie) V3 : voiture d articulation de masse 3,1 tonnes (sans boggie) Figure 1 : Description des éléments du tramway TFS Figure 2 : Données géométriques sur le tramway (Dimensions en mm) 3/12
")

20 Actions exercées par le moteur : Actions exercées par le stator sur le rotor modélisées par le couple Cm Paramètres associés aux mouvements : Rotation de l arbre moteur 1 par rapport au bâti : paramètre θ 1 Rotation de l arbre 2 par rapport au bâti : paramètre θ 2 Rotation de la vis 3 par rapport au bâti : paramètre θ 3 z 1 z 0 z 2 z 0 y 3 y 0 θ 1 θ 2 θ 3 y 1 y 2 x 3 θ 1 θ 2 θ 3 x 0 x y 1 0 x 0 y 0 Translation du chariot : O 0O 4 = z 4. Z0 x 0 x y 2 0 x 0 y 0 z 0 z x 3 0 z 0 x 0 Figure 3 : Modélisation cinématique 4/12

21 Données sur les liaisons : a) Liaison L 12 Pignon de l arbre 1 engrenant avec l arbre 2 : nombre de dents Z 12 = 15 Roue de l arbre 2 engrenant avec l arbre 1 : nombre de dents Z 21 = 75 Rendement η = 0,9 b) Liaison L 23 Pignon de l arbre 2 engrenant avec la vis 3 : nombre de dents Z 23 = 14 Roue de la vis 3 engrenant avec l arbre 2 : nombre de dents Z 32 = 35 Rendement η = 0,9 c) Liaison L 34 Pas du système vis-écrou : p 34 = 5 mm Rendement η = 0,4 d) Autres liaisons parfaites Caractéristiques cinétiques : Arbre 1 Masse : M 1 = 8,9 kg Matrice d inertie : A1 0 0 I( G1,1) = 0 B C x1 y1 z 1 ) 1 (,, A 1 = 10,5 x 10-3 kg.m 2 B 1 = 32,6 x 10-3 kg.m 2 C 1 = 32,6 x 10-3 kg.m 2 Arbre 2 : Masse M 2 = 7,7 kg Matrice d inertie : A2 0 0 I( G2,2) = 0 B C x 2 y2 z2 2 (,, ) A 2 = 16,2 x 10-3 kg.m 2 B 2 = 29,8 x 10-3 kg.m 2 C 2 = 29,8 x 10-3 kg.m 2 Vis 3 : Masse : M 3 = 37,1 kg Matrice d inertie : A3 0 0 I( G3,3) = 0 B C 3 ( x, y, z ) A 3 = 13,6 x 10-3 kg.m 2 B 3 = 17,9 kg.m 2 C 3 = 17,9 kg.m 2 Chariot 4 : Masse M 4 = 21,7 kg Matrice d inertie : A4 0 E4 I( G4,4) = 0 B4 0 E 0 C 4 4 ( x4, y4, z4) A 4 = 12,1 kg.m 2 B 4 = 5,7 kg.m 2 C 4 = 8,1 kg.m 2 E 4 = 3,2 kg.m 2 Figure 4 : Données techniques et cinétiques du modèle d étude 5/12



22 Puissance nominale à 50 hz Vitesse nominale Moment nominal Intensité nominale Facteur de puissance Rendement Intensité démarrage /intensité nominale Moment démarrage /moment nominal Moment d'inertie Moment de freinage Masse IM B5 Type moteur Type frein P N kw N N min -1 M N N.m I N A Cos 100% η 100% 10-3 I D /I N M D /M N J kg.m 2 M f N.m J01 à J03 kg Type moteur LS80L FCRJ02 0, ,5 1,64 0, ,8 2,9 3, ,5 LS80L LS80L FCRJ02 0, ,12 2 0, ,2 2,7 4, ,6 LS80L LS90L FCRJ02 1, ,35 2,8 0,8 70 3,9 1,9 7, ,5 LS90L LS90L FCRJ02 1, ,03 3,8 0,78 73,5 4,4 2,3 7, ,5 LS90L LS90L FCRJ02 1, ,95 4,2 0,81 77,3 5,4 2,7 8, ,2 LS90L LS100L FCRJ02 2, ,5 5,4 0, ,3 2, LS100L LS100L FCRJ ,5 7,1 0, ,4 2,7 10, LS100L LS160LR FCRJ ,8 0, ,4 3, LS160LR Figure 5 : Caractéristiques du moteur frein 6/12





23 Figure 6 : Modélisation pour l'étude du basculement Figure 7 : Modélisation pour le calcul de la pression de contact 7/12


24 Figure 8 : Grafcet GR de mise en référence Figure 9 : Grafcet GM2 de commande du moteur de la colonne 2 8/12

25 Figure 10 : Grafcet GM1 de commande du moteur de la colonne 1 9/12
26 10/12
27 11/12





28 12/12
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
SCIENCES DE L INGENIEUR
 SCIENCES DE L INGENIEUR 2013/2 014 ANALYSE DU BESOIN ANALYSE FONCTIONNELLE EXTERNE ANALYSE FONCTIONNELLE INTERNE CHAINE FONCTIONNELLE EXERCICES Glioula.mohamed@gmail.com 0699717946 1 A- Généralités et
SCIENCES DE L INGENIEUR 2013/2 014 ANALYSE DU BESOIN ANALYSE FONCTIONNELLE EXTERNE ANALYSE FONCTIONNELLE INTERNE CHAINE FONCTIONNELLE EXERCICES Glioula.mohamed@gmail.com 0699717946 1 A- Généralités et
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
DYNAMIQUE DE FORMATION DES ÉTOILES
 A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
COMMANDER la puissance par MODULATION COMMUNIQUER
 SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
«La solution» DESCRIPTION TECHNIQUE
 «La solution» DESCRIPTION TECHNIQUE MultiPark Duolift Champ d application Dans des complexes résidentiels et dans des complexes d affaires, chez des loueurs de véhicules ou chez des concessionnaires automobiles.
«La solution» DESCRIPTION TECHNIQUE MultiPark Duolift Champ d application Dans des complexes résidentiels et dans des complexes d affaires, chez des loueurs de véhicules ou chez des concessionnaires automobiles.
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
TENONNEUSE SIMPLE CONVERPRO REF.921 D OCCASION
 TENONNEUSE SIMPLE CONVERPRO REF.921 D OCCASION Année de fabrication : Août 2008 Machine N : 03 3718 Vendeur : SCIERIE E. DUBREUIL Rue François Baron - BP 20-63390 SAINT GERVAIS D'AUVERGNE Téléphone : 04
TENONNEUSE SIMPLE CONVERPRO REF.921 D OCCASION Année de fabrication : Août 2008 Machine N : 03 3718 Vendeur : SCIERIE E. DUBREUIL Rue François Baron - BP 20-63390 SAINT GERVAIS D'AUVERGNE Téléphone : 04
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Prescriptions techniques et de construction pour les locaux à compteurs
 Prescriptions techniques et de construction pour les locaux à compteurs Référence: SIB10 CCLB 110 Date : 22/10/2010 Page 1/9 Table des matières 1 PRELIMINAIRES... 3 2 ABREVIATIONS... 3 3 ACCESSIBILITE
Prescriptions techniques et de construction pour les locaux à compteurs Référence: SIB10 CCLB 110 Date : 22/10/2010 Page 1/9 Table des matières 1 PRELIMINAIRES... 3 2 ABREVIATIONS... 3 3 ACCESSIBILITE
Version MOVITRANS 04/2004. Description 1121 3027 / FR
 MOVITRANS Version 04/2004 Description 1121 3027 / FR SEW-USOCOME 1 Introduction... 4 1.1 Qu est-ce-que le MOVITRANS?... 4 1.2 Domaines d utilisation du MOVITRANS... 4 1.3 Principe de fonctionnement...
MOVITRANS Version 04/2004 Description 1121 3027 / FR SEW-USOCOME 1 Introduction... 4 1.1 Qu est-ce-que le MOVITRANS?... 4 1.2 Domaines d utilisation du MOVITRANS... 4 1.3 Principe de fonctionnement...
CONCOURS GÉNÉRAL DES LYCÉES Session 2014. Durée 5 heures. Corrigé. Poséidon au secours d Éole pour produire l énergie électrique
 CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
«La solution» DESCRIPTION TECHNIQUE
 «La solution» DESCRIPTION TECHNIQUE P2-f & P4-f - 185/180 - Standard P2-f & P4-f - 170/165 - Compact P2-f & P4-f - 200/195 - Confort MODELE H DH P2f-4f - 185/180 - Standard 340 171 P2f-4f - 170/165 - Compact
«La solution» DESCRIPTION TECHNIQUE P2-f & P4-f - 185/180 - Standard P2-f & P4-f - 170/165 - Compact P2-f & P4-f - 200/195 - Confort MODELE H DH P2f-4f - 185/180 - Standard 340 171 P2f-4f - 170/165 - Compact
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
Capteur mécanique universel HF 32/2/B
 Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE
 Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
2 La technologie DTC ou le contrôle direct de couple Guide technique No. 1
 ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
ventilation Caisson de ventilation : MV
 ventilation Caisson de ventilation : MV FTE 101 148 C Septembre 2012 MV caisson de ventilation économique Descriptif technique Encombrement, réservation et poids Ø X Y Z H h A B Poids (kg) MV5-6P 248 450
ventilation Caisson de ventilation : MV FTE 101 148 C Septembre 2012 MV caisson de ventilation économique Descriptif technique Encombrement, réservation et poids Ø X Y Z H h A B Poids (kg) MV5-6P 248 450
RÉFÉRENTIEL TECHNIQUE
 SYSTÈMES ÉNERGÉTIQUES INSULAIRES RÉFÉRENTIEL TECHNIQUE CONTRÔLES DES PERFORMANCES AVANT LA MISE EN EXPLOITATION DEFINITIVE DES INSTALLATIONS DE PRODUCTION D ÉNERGIE ÉLECTRIQUE RACCORDÉES EN HTB DANS LES
SYSTÈMES ÉNERGÉTIQUES INSULAIRES RÉFÉRENTIEL TECHNIQUE CONTRÔLES DES PERFORMANCES AVANT LA MISE EN EXPLOITATION DEFINITIVE DES INSTALLATIONS DE PRODUCTION D ÉNERGIE ÉLECTRIQUE RACCORDÉES EN HTB DANS LES
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
TP2 ACTIVITE ITEC. Centre d intérêt : AUBE D UN MIRAGE 2000 COMPORTEMENT D UNE PIECE. Documents : Sujet Projet Dossier technique - Document réponse.
 ACTIVITE ITEC TP2 Durée : 2H Centre d intérêt : COMPORTEMENT D UNE PIECE AUBE D UN MIRAGE 2000 BA133 COMPETENCES TERMINALES ATTENDUES NIVEAU D ACQUISITION 1 2 3 * * Rendre compte de son travail par écrit.
ACTIVITE ITEC TP2 Durée : 2H Centre d intérêt : COMPORTEMENT D UNE PIECE AUBE D UN MIRAGE 2000 BA133 COMPETENCES TERMINALES ATTENDUES NIVEAU D ACQUISITION 1 2 3 * * Rendre compte de son travail par écrit.
Informations produits scalamobil S35 scalacombi S36
 Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Ponts élévateurs à deux colonnes
 Ponts élévateurs à deux colonnes Type : MAPOWER II 3.0 MAPOWER II 3.5 ECON III 4.0 ECON III 5.0 ECONLIFT 6500 HL CS 4.0 Lifting Technology Pour voitures et véhicules de transport, jusqu'à un poids total
Ponts élévateurs à deux colonnes Type : MAPOWER II 3.0 MAPOWER II 3.5 ECON III 4.0 ECON III 5.0 ECONLIFT 6500 HL CS 4.0 Lifting Technology Pour voitures et véhicules de transport, jusqu'à un poids total
Plate-formes inclinées SUPRA & SUPRA LINEA
 Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Plate-formes inclinées SUPRA & SUPRA LINEA SUPRA LINEA - pour les escaliers droits Supra Linea économise l espace et est caractérisé par ses couleurs douces, ses bords arrondis et ses barrières pliables.
Jean-Marc Schaffner Ateliers SCHAFFNER. Laure Delaporte ConstruirAcier. Jérémy Trouart Union des Métalliers
 Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Le triac en commutation : Commande des relais statiques : Princ ipe électronique
 LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
L AUTOMATISME LE SIGNAL
 L AUTOMATISME LE SIGNAL Page 1 sur 7 Sommaire : 1- Champ de l automatisme définitions 2- Correspondance entre phénomènes physiques et signaux a. Capteur b. Exemple de capteur TOR c. Exemple de capteur
L AUTOMATISME LE SIGNAL Page 1 sur 7 Sommaire : 1- Champ de l automatisme définitions 2- Correspondance entre phénomènes physiques et signaux a. Capteur b. Exemple de capteur TOR c. Exemple de capteur
1 ère partie : tous CAP sauf hôtellerie et alimentation CHIMIE ETRE CAPABLE DE. PROGRAMME - Atomes : structure, étude de quelques exemples.
 Référentiel CAP Sciences Physiques Page 1/9 SCIENCES PHYSIQUES CERTIFICATS D APTITUDES PROFESSIONNELLES Le référentiel de sciences donne pour les différentes parties du programme de formation la liste
Référentiel CAP Sciences Physiques Page 1/9 SCIENCES PHYSIQUES CERTIFICATS D APTITUDES PROFESSIONNELLES Le référentiel de sciences donne pour les différentes parties du programme de formation la liste
Automatique (AU3): Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr
: Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr") Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
ANALYSE DES DIFFERENTES FONCTIONNALITES DU FAUTEUIL
 Dossier remis aux candidats: Un énoncé comportant 24 pages de texte en 5 parties : ANALYSE DES DIFFERENTES FONCTIONNALITES DU FAUTEUIL (Partie I page 4), ANALYSE DES FONCTIONS TECHNIQUES FT31 ET FT32 (Partie
Dossier remis aux candidats: Un énoncé comportant 24 pages de texte en 5 parties : ANALYSE DES DIFFERENTES FONCTIONNALITES DU FAUTEUIL (Partie I page 4), ANALYSE DES FONCTIONS TECHNIQUES FT31 ET FT32 (Partie
TAP-PAR. Test d aptitudes physiques pour paramédics. Description du test
 TAP-PAR Test d aptitudes physiques pour paramédics Description du test INTRODUCTION Le travail de paramédic nécessite une capacité physique supérieure à celle de la population moyenne. En effet, ceux-ci
TAP-PAR Test d aptitudes physiques pour paramédics Description du test INTRODUCTION Le travail de paramédic nécessite une capacité physique supérieure à celle de la population moyenne. En effet, ceux-ci
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux. - Section Audioprothésiste / stage i-prépa intensif -
 POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
E/ECE/324/Rev.1/Add.12/Rev.7/Amend.4 E/ECE/TRANS/505/Rev.1/Add.12/Rev.7/Amend.4
 6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
DimNet Gradateurs Numériques Evolués Compulite. CompuDim 2000
 DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
Actionneur d'ouvre portail
 Actionneur d'ouvre portail Non présent sur le système pédagogique Portail en position A "Fusible" Redresseur Relais Moteur asynchrone monophasé, Pompe hydraulique à engrenage, Vérin hydraulique double
Actionneur d'ouvre portail Non présent sur le système pédagogique Portail en position A "Fusible" Redresseur Relais Moteur asynchrone monophasé, Pompe hydraulique à engrenage, Vérin hydraulique double
3/11_WHEEL ROADER/KE's仏語 04.3.11 5:13 PM ページ 3 KUBOTA WHEEL LOADER
 KUBOTA WHEEL LOADER Puissantes, polyvalentes, et souples d utilisation, nos chargeuses sur roues offrent des performances optimales pour une grande variété d applications. Charger, reboucher, niveler,
KUBOTA WHEEL LOADER Puissantes, polyvalentes, et souples d utilisation, nos chargeuses sur roues offrent des performances optimales pour une grande variété d applications. Charger, reboucher, niveler,
AVEC BVL, prenez de la hauteur!
 AVEC BVL, prenez de la hauteur! AVEC BVL, prenez de la hauteur! Le mot des dirigeants Depuis 1993, nous répondons à toutes les demandes d élévations et d accessibilité pour les personnes et les charges.
AVEC BVL, prenez de la hauteur! AVEC BVL, prenez de la hauteur! Le mot des dirigeants Depuis 1993, nous répondons à toutes les demandes d élévations et d accessibilité pour les personnes et les charges.
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN. Machine à commande numérique destinée au tronçonnage des dés.
 MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
1. PRESENTATION GENERALE DU PRODUIT
 1. PRESENTATION GENERALE DU PRODUIT 1.1 Mise en situation : A quoi servent les pneus? Les pneus sont des éléments qui relient la voiture à la route. Ils doivent donc être en parfait état pour remplir leurs
1. PRESENTATION GENERALE DU PRODUIT 1.1 Mise en situation : A quoi servent les pneus? Les pneus sont des éléments qui relient la voiture à la route. Ils doivent donc être en parfait état pour remplir leurs
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Chapitre 7. Circuits Magnétiques et Inductance. 7.1 Introduction. 7.1.1 Production d un champ magnétique
 Chapitre 7 Circuits Magnétiques et Inductance 7.1 Introduction 7.1.1 Production d un champ magnétique Si on considère un conducteur cylindrique droit dans lequel circule un courant I (figure 7.1). Ce courant
Chapitre 7 Circuits Magnétiques et Inductance 7.1 Introduction 7.1.1 Production d un champ magnétique Si on considère un conducteur cylindrique droit dans lequel circule un courant I (figure 7.1). Ce courant
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle