ETUDE D UN MANIPULATEUR AUTO-EQUILIBRE PNEUMATIQUE.
|
|
|
- Edmond Boutin
- il y a 8 ans
- Total affichages :
Transcription
1 ocuments interdits. alculatrice autorisée. Le candidat est invité à formuler toute hypothèse qui lui semblerait nécessaire pour pouvoir répondre aux questions posées. Sauf indication, vous répondrez sur feuille de copie. Tous les résultats seront encadrés. ETUE UN MANIPULATEUR AUTO-EQUILIRE PNEUMATIQUE. Présentation générale. ontexte et marché. Les entreprises industrielles travaillent constamment à l amélioration de la productivité et de la rentabilité. Sur des opérations de manutention, positionnement, montage, à faible cadence, l automatisation à outrance et les cellules robotisées ne sont pas rentables Les systèmes d aide à la manutention sont un compromis intéressant. En effet l employeur maintient une activité humaine (conservation d emploi) tout en limitant la pénibilité donc en améliorant les conditions de travail, pour des coûts d investissement modestes. Il existe différentes familles de systèmes d aide à la manutention : Potence, Pont roulant, ras manipulateur est ce dernier type de système d aide à la manutention que l on se propose d étudier. Plus particulièrement un matériel développé, fabriqué et distribué par la société SARRAZIN. Principe. La charge est suspendue en bout de bras à un système de préhension ou préhenseur. Le poids de la charge à manutentionner est équilibré par le bras, l utilisateur accompagne la charge dans son déplacement dans la limite des courses disponibles. Les seuls efforts à fournir sont ceux nécessaires à vaincre les frottements et les effets d inertie. Lorsque l utilisateur lâche la charge, elle doit rester stable en position dans l espace. 1

2 Figure 1 : Exemple de bras manipulateur de bobine. ras manipulateur étudié. Le manipulateur étudié est constitué : un système de préhension, défini sur mesure en fonction de la charge à manutentionner. un bras articulé (cinématique brevetée). une tête en liaison pivot d axe vertical par rapport à la colonne support, un actionneur pneumatique (ou éventuellement électrique) implanté dans la tête, une colonne support scellée au sol pour l installation sur pied. Il existe aussi des versions suspendues à la charpente ou lestées autostables ne nécessitant pas d ancrage au sol. Les mobilités autorisées au niveau du bras et de la colonne permettent à l utilisateur d atteindre tout point de l espace, dans la limite des courses disponibles. est l action de l utilisateur sur la charge (ou le préhenseur) qui provoque son mouvement. On parle de système d aide à la manutention. ras articulé Tête olonne support Préhenseur Figure 2 : Représentation simplifiée d un bras manipulateur. 2

3 Utilisation. Un cycle type d utilisation du système d aide à la manutention peut se décomposer de la manière suivante : Assister l utilisateur pour le déplacement du préhenseur (suspendu en bout de bras) à vide jusqu'à proximité de la charge, Assister l utilisateur pour le positionnement et l orientation du préhenseur pour saisir la charge, Prendre la charge avec le préhenseur, Assister l utilisateur pour le déplacement de la charge maintenue par le préhenseur, Assister l utilisateur pour le positionnement et l orientation de la charge pour la dépose, épose de la charge, Assister l utilisateur pour le retour du préhenseur à vide pour le cycle suivant. ertains mouvements de prise, de dépose ou d orientation au niveau du préhenseur peuvent être motorisés, les autres étant provoqués par l utilisateur. Fonctionnement du bras manipulateur. Etude de la cinématique du bras articulé. La cinématique du bras manipulateur seul (sans l articulation d axe vertical) est donnée sur la figure 3. Elle est similaire à celle d un pantographe. un coté la charge suspendue (au point H), de l autre l effort d équilibrage développé par l actionneur et appliqué au point. Le bras est constitué de 4 classes d équivalence ou sous ensembles fonctionnels (sans compter la tête qui est représentée ici par le bâti). A savoir : arre F : ras porteur, arre : iellette arrière, arre E : ras de reprise, arre HE : ras flèche. Les liaisons en,, E et F sont des liaisons pivot d axe perpendiculaire à la feuille. es 4 articulations forment un parallélogramme déformable. Au point, le bras est en liaison pivot avec la tête du manipulateur (représentée ici par le bâti). Autres propriétés géométriques importantes : HF est un triangle isocèle, Les points H, et restent constamment alignés quelque soit l orientation du bras. E F H Mg r γ Poids de la charge manutentionnée Fv Tête Effort développé par l actionneur Figure 3 : Schéma cinématique du bras seul α y r x r 3

4 Auto équilibrage pneumatique. L actionneur pneumatique est implanté dans la tête. L extrémité de sa tige est en liaison mécanique avec le bras au point. Actionneur pneumatique 1 p Régulateur de pression de précision Alimentation pneumatique 6 bars 2 Figure 4 : Schéma pneumatique partiel d alimentation de l actionneur pneumatique. L action mécanique de la pression p établie dans le vérin équilibre la charge suspendue en bout de bras. ette pression, dite d équilibrage, est réglée par l utilisateur et régulée par le régulateur de pression de précision. Si l opérateur exerce sur la charge un effort vers le bas pour la faire descendre, la tige du vérin est tirée vers le haut par l intermédiaire du bras. L air emprisonné dans la chambre 1 est en légère surpression donc le régulateur évacue le surplus d air pour maintenir la pression d équilibre. Lorsque l opérateur lâche la charge, elle reste en équilibre. Le principe est similaire pour faire monter la charge. e système permet donc d avoir une charge stable dans l espace et déplaçable moyennant de faibles efforts, liés à l inertie et aux frottements. Le distributeur 2/2 est un organe de sécurité. En effet en cas de coupure d alimentation pneumatique, la charge ne doit pas tomber sur l utilisateur. Le distributeur 2/2 normalement fermé bloque l air dans la chambre 1 du vérin et évite la chute brutale de la charge. Partie 1 : Etude préliminaire. ette partie doit nous permettre de mieux comprendre le fonctionnement du bras manipulateur. 1. Identifier la fonction principale du bras manipulateur et de son préhenseur en phase d utilisation normale. évelopper cette fonction principale en sous fonctions dans un diagramme FAST comme ci-dessous : Fp1: 4

5 2. Tracer le graphe de liaisons du bras seul à partir du schéma cinématique proposé en figure alculer le nombre de mobilité et le degré d hyperstatisme du bras seul. 4. Proposer une évolution isostatique du schéma cinématique, tout en conservant la fonctionnalité. ommenter. 5. Exprimer le rapport des longueurs H/ en fonction de HF et. e rapport est indépendant de l orientation du bras. Pour la suite il sera appelé rapport d homothétie, il sera noté k ; en pratique 7<k< En déduire la relation entre le poids de la charge (noté M g ) suspendue en bout de bras et l effort développé par l actionneur (noté F v ) pour équilibrer cette charge. On négligera les poids des barres et on supposera les liaisons parfaites. Les poids des barres constituant le bras ne sont pas négligeables. Pour compenser partiellement leurs incidences et assurer la stabilité de la charge dans l espace quand l opérateur la lâche, on dispose un contrepoids à l arrière du bras porteur. Nous n étudierons pas ces problèmes d équilibrage. F E H Gc Zone 1 a b ontrepoids Figure 5 : Schéma cinématique avec contrepoids. 7. Si le point décrit une surface rectangulaire (zone 1 sur la figure 5), définir à l échelle et caractériser sur le document réponse R1 le lieu des points H. Les esquisses de construction seront soigneusement représentées. ette partie nous a permis de mieux comprendre le fonctionnement du bras manipulateur. Pour une charge constante en bout de bras, un effort constant vertical au point permet d équilibrer la charge dans toutes les positions permises par la cinématique du bras 5
 suspendue en bout de bras et l effort développé par l actionneur (noté F v ) pour équilibrer cette charge.")
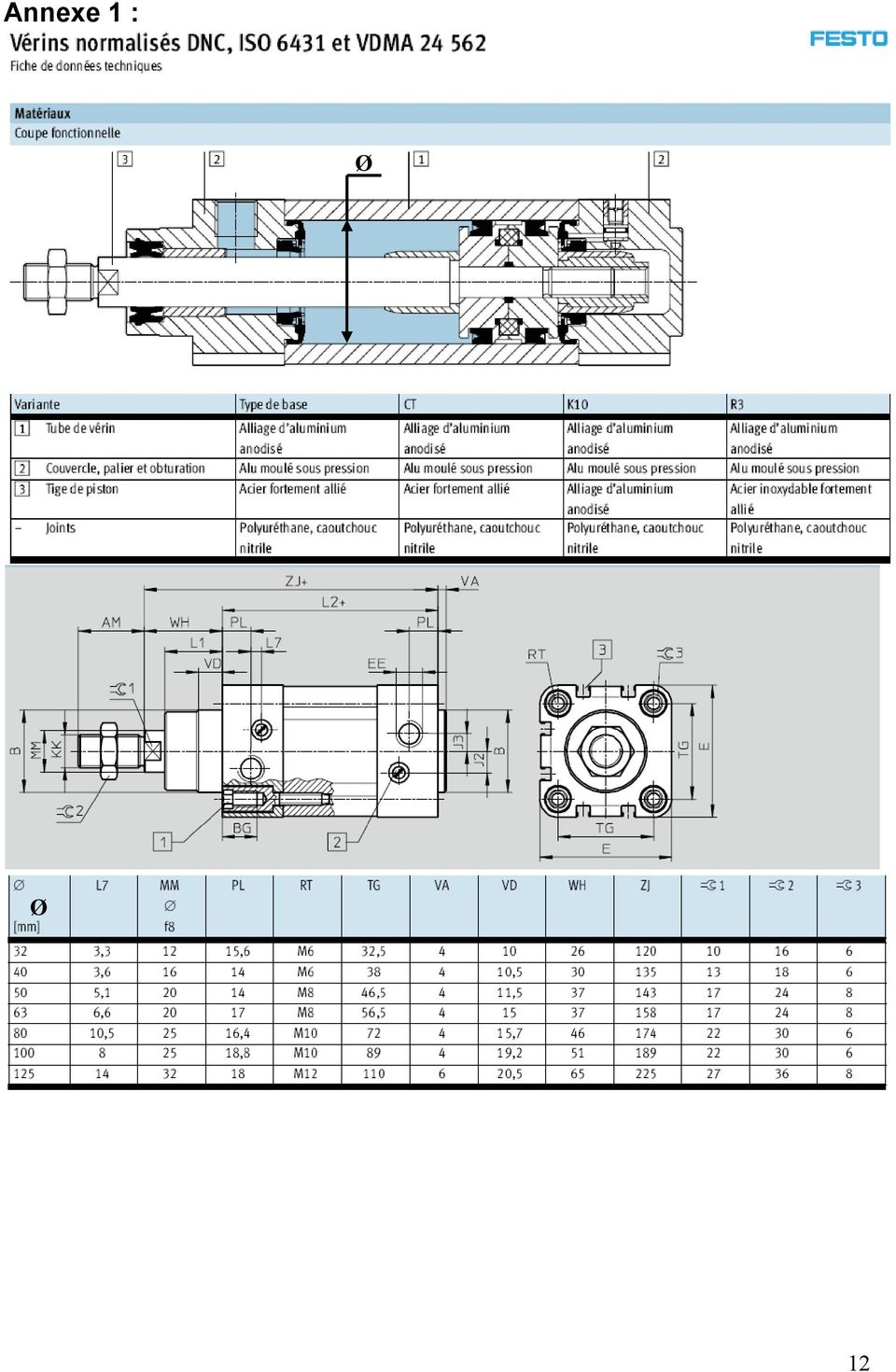
6 Pour toute la suite de l étude, on prendra :: Masse nominale suspendue en bout du bras : M= 60 kg, ourse verticale du point H : h= 1500 mm, Rapport d homothétie : k= H/= 9 F= 2000 mm H x maxi= 3500 mm Partie 2 : hoix et implantation de l actionneur pneumatique. L objectif de cette partie est de choisir un actionneur pneumatique exerçant l effort d équilibrage au point et de définir son implantation. H F E orps vérin Pivot glissant Tête ou bâti?? Tige vérin Pivot en arre F Pivot en arre? Figure 6 : Schéma cinématique et graphe de liaisons incomplets. On souhaite proposer une architecture pour l implantation du vérin pneumatique. 8. ompléter les tableaux des documents réponse R2 et R3. 9. La pression du réseau pneumatique étant de 6 bars, choisir un actionneur pneumatique dans la documentation jointe en annexe 1. Vous préciserez le diamètre du piston, le diamètre de tige, la course et la référence constructeur du vérin. Le schéma technologique partiel de la liaison entre le bras au point et la tige du vérin est représenté sur le document réponse R ompléter le schéma technologique du document réponse R4 en définissant : Les arrêts des roulements à billes à contact radial (les bagues intérieures et extérieures seront arrêtées). La liaison entre la tige du vérin et l axe de l articulation en. 6

7 Partie 3 : éfinition de la liaison pivot de la tête avec le bâti. L objectif de cette partie est de choisir un composant et de définir son implantation pour réaliser la liaison pivot entre la tête et la colonne support. F E y r H Mg r r x Tête A x x0 olonne O y r O. θ z z0 Figure de changement de base Figure 7 : Schéma cinématique bras manipulateur, sans actionneur. La tête du bras manipulateur est articulée autour d un axe vertical par rapport à la colonne fixée au sol. ette liaison pivot au point A permet à l utilisateur, lors du déplacement de sa charge, de desservir un volume limité par deux surfaces cylindriques coaxiales. Pour réaliser cette liaison pivot en limitant l encombrement et la complexité des pièces adjacentes, le constructeur s est orienté vers une couronne d orientation (voir descriptif en annexe 2). Les questions qui suivent permettront de choisir cette couronne d orientation et de définir son implantation. onnées : ( x 0,y 0,z0 ) base liée à la colonne donc ici le bâti, ( x,y,z) base liée à la tête du bras. Hypothèse : On négligera les poids du bras et de la tête. onc, seul le poids de la charge sera pris en compte. 11. Exprimer le torseur des actions mécaniques de la tête sur le bras, développées dans la liaison pivot au point, dans la base ( x,y,z) exprimé en. alculer les composantes. 12. Exprimer le torseur des actions mécaniques de la colonne support sur la tête, développées dans la liaison pivot au point A, dans la base ( x,y,z) exprimé en A. alculer les composantes. Fort de ces résultats, le constructeur a choisi un modèle de couronne d orientation de la famille 03 de chez Rollix efontaine. (Voir extrait de documentation en annexe 2). 7

8 13. Sur le document réponse R5, définir l implantation détaillée de cette couronne entre la tête et la colonne. La bague extérieure de la couronne sera en liaison complète démontable (par éléments filetés) avec la tête. La bague intérieure de la couronne sera en liaison complète démontable (par éléments filetés) avec la colonne. Partie 4 : Etude dynamique simplifiée. On propose le schéma cinématique minimal ci-dessous. E y r F H Mg r γ δ On démontre que: α + γ δ = 2 α A Gc I x r x Pression alimentation vérin x0 O y r O θ z z0 Figure de changement de base Figure 8 : Schéma cinématique bras manipulateur complet. L objectif de cette partie est d estimer les efforts que devra exercer l utilisateur lors d une opération de manutention afin de s assurer que ces efforts sont compatibles avec le cahier des charges client et les recommandations faites par les normes en vigueur. onnées : ( x 0,y 0,z0 ) base liée à la colonne donc ici le bâti, ( x,y,z) base liée à la tête du bras, iamètre du piston de vérin : v, G et M : centre d inertie et masse de la charge suspendue en bout de bras, fa : couple de frottement sec au niveau de l articulation d axe vertical en A, F f : Frottement sec s opposant au mouvement horizontal de l actionneur pneumatique, F vf : Frottement sec s opposant au mouvement de translation du piston dans le vérin, Δ p : Sensibilité de déclenchement du régulateur de pression de précision. Lors d un mouvement de montée (ou descente), il faudra une variation de pression Δ p dans la chambre 1 du vérin pour que le régulateur de précision admette (ou évacue) de l air pour maintenir la pression d équilibrage. 8

9 Hypothèses : On supposera G, le centre d inertie de la masse M en H. La section de la tige de vérin sera négligée devant la section du piston. On négligera les masses des barres constituant le bras, du contrepoids et de la tête. onc, sauf indication contraire, seule la masse de la charge sera prise en compte. ette dernière sera considérée comme une masse ponctuelle. En phase de rotation de la charge autour de l axe vertical (O, y 0 ). 14. Exprimer le moment dynamique au point, en projection sur y 0, de la charge de masse M dans son mouvement par rapport à R0, en fonction de M, H, δ, θ et ses dérivées successives par rapport au temps. La forme générale du torseur des actions mécaniques de l utilisateur sur la charge exprimée en H, dans la base ( x,y,z) est notée : Fx 0 { Tutili charge} = F H y 0 Fz 0 (x,y,z) 15. Exprimer la composante Fz du torseur des actions mécaniques de l utilisateur sur la charge en phase de rotation accélérée autour de l axe ( O,y 0 ) La vitesse du point G appartenant à la charge, exprimée dans la base ( x,y,z) est notée : { VG harge /R0} Vx = Vy V z (x,y,z) L accélération du point G appartenant à la charge, exprimée dans la base ( x,y,z) est notée : { Γ (G /R0)} a = a a x y z (x,y,z) En phase de déplacement radial suivant x. 16. Exprimer l énergie cinétique de la masse M, dans son mouvement par rapport au bâti, déplacée par l opérateur suivant x (rotation autour de ( O,y 0 ) bloquée). 17. Rappeler le théorème de l énergie cinétique sous sa forme générale en définissant vos notations. 18. En phase de mouvement accéléré, exprimer la composante F x du torseur des actions mécaniques de l utilisateur sur la charge, en fonction de M, a x, F f et k. 9

10 En phase de déplacement vertical suivant y. 19. Exprimer l énergie cinétique de la masse M, dans son mouvement par rapport au bâti, déplacée par l opérateur suivant y (rotation autour de ( O,y 0 ) bloquée) 20. En phase de mouvement accéléré, exprimer la composante Fy du torseur des actions mécaniques de l utilisateur sur la charge, en fonction de M, a y, F vf, k, Δ p, et v. onnées : M= 60 kg a x = a y = a z = 0,5 m/s 2 H x = 3500 mm v = 125 mm fa =5 Nm F f = 20 N F vf = 100 N Δ p = 0,3*10-3 bar 21. alculer les efforts F z, F y et F x respectivement à développer pour chacun des 3 mouvements décrits ci-avant et faire un tableau récapitulatif (comme ci-dessous) pour une phase d accélération uniforme et une phase de déplacement à vitesse constante. onclure. F x F y F z a x = 0,5 m/s 2 a x = 0 a y = 0,5 m/s 2 a y =0 a z = 0,5 m/s 2 a z =0 22. Même si la plupart des liaisons pivot sont montées sur roulements à billes, le rendement mécanique global du bras est estimé à η= 0,8. Reprendre les questions 18 et 20 en prenant en compte le rendement. En fait les inerties des bras et de la tête ne sont pas négligeables 23. Qualitativement, quelle est l incidence des masses des éléments constituant le bras sur l effort à développer par l utilisateur. Partie 5 : Etude du bras manipulateur complet. L objectif de cette partie est de calculer les actions mécaniques dans les articulations N et H. eci permettrait de dimensionner les guidages. Lorsque le poids de la charge manutentionnée n est pas à la verticale du point H, pour maintenir une orientation fixe de la charge par rapport à la verticale, on utilisera un système complémentaire dit de maintien horizontal. e système est constitué de deux biellettes (KJ et LN) formant deux parallélogrammes déformables avec le bras porteur (F) et le bras flèche (HE). Voir Schéma cinématique figure 9. 10

11 K E y r L F Q Mg r r G N L H γ Préhenseur α J A Gc I x r Pression alimentation vérin O Figure 9 : Schéma cinématique du bras manipulateur avec système de maintien horizontal escription : Les barres NL et KJ constituent les biellettes de maintien horizontal. La pièce constituée des deux segments LF et KF s appelle le renvoi d angle. Au point J la biellette KJ est en liaison pivot avec un point fixe sur la tête. Grace à ce système, quelque soit la position prise par le bras, l orientation de la charge par rapport à la verticale reste sensiblement constante, aux déformations et aux jeux près. Pour régler ce système, rattraper les jeux, les déformations, les défauts, l une des deux biellettes (ou les deux) est en principe de longueur variable grâce à un double système vis écrou pas à droite, pas à gauche (voir extrait plan d ensemble en annexe 3) L ensemble (préhenseur + charge) est en équilibre dans l espace sans action de l utilisateur. 24. Isoler l ensemble (préhenseur + charge). Réaliser le bilan des actions mécaniques. 25. Exprimer les torseurs des actions mécaniques développées dans les liaisons en N et H exprimés respectivement aux points N et H, dans la base ( x,y,z). 26. ans la configuration du schéma cinématique figure 9, les biellettes de maintien horizontal NL et KJ sont elles étirées ou comprimées? Justifiez votre réponse. L opérateur est en phase de déplacement accéléré de la charge suivant y. L action mécanique de l utilisateur sur la charge sera considérée comme un glisseur appliqué au point Q. 27. Reprendre et compléter l expression des torseurs des actions mécaniques développées dans les liaisons en N et H exprimés respectivement aux points N et H dans la base ( x,y,z). ommenter. 28. ommenter l impact des positions des points G et Q. 11

12 Annexe 1 : Ø Ø 12
13 Annexe 2 : ouronnes d orientation. Les couronnes d orientation intègrent les fonctions : Guider en rotation, Transmettre le mouvement de rotation, (pas systématiquement) Permettre la fixation directe sur les éléments adjacents. L intégration de ces fonctions techniques en un seul composant permet de simplifier considérablement la conception (par rapport à une solution pivot sur palier à roulements) et d avoir un montage très compact (en épaisseur) tout en supportant des charges radiales, axiales ainsi qu un moment de renversement important. Les applications sont nombreuses : Robotique, Eolienne, Radar, Ferroviaire, Machines spéciales, Travaux publics, Manutention, nacelles 13

14 omme un roulement à billes, une couronne d orientation est constituée d une bague intérieure et d une bague extérieure dans lesquelles des perçages permettent la fixation par éléments filetés sur les pièces adjacentes. Entre ces deux bagues sont interposés des éléments roulants, soit des billes, soit des galets alternativement croisés, pour les fortes charges. es bagues intérieures ou extérieures peuvent être dotées d une denture permettant la motorisation du mouvement de rotation. Vue en coupe d une couronne d orientation à galets croisés à denture extérieure. (Source catalogue ROLLIX) Trous de fixation borgnes ou passants, lisses ou taraudés Vue 3 en coupe partielle d une couronne d orientation à galets croisés à denture extérieure. (Source site internet ROLLIX) Quelques familles de couronnes d orientation (Source catalogue ROLLIX) 14

15 ocument réponse R1 F E Zone 1 a H b Gc

16 ocument réponse R2 Implantation de l actionneur pneumatique Solution 1 Solution 2 Solution 3 Solution 4 alculer les degrés d hyperstatisme de chaque solution proposée ci dessus.

17 ocument réponse R3 Implantation de l actionneur pneumatique Solution 1 Solution 2 Solution 3 Solution 4 Identifier les avantages (aptitudes au fonctionnement, simplicité ) de chaque solution. Identifier les inconvénients (inaptitudes au fonctionnement, complexité ) de chaque solution. Spécifier si la solution est : refusée, acceptable ou recommandée. Argumenter
 de chaque")
18 ocument réponse R4 arres Axe articulation

19 ocument réponse R5 y r 0 Tête A olonne

20 Annexe 3 Plan ensemble ras flèche E K L F N H 15

Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
DISPOSITIF DE BLOCAGE STATIQUE Ø 32 à 100 mm - double effet ISO 15552
 DISPOSITIF DE BLOCAGE STATIQUE Ø 3 à 100 mm - double effet ISO 1555 Séries 53-50 9 PRESENTATION Il est destiné à assurer le maintien et le blocage en position extrême de la tige du vérin sous charge lors
DISPOSITIF DE BLOCAGE STATIQUE Ø 3 à 100 mm - double effet ISO 1555 Séries 53-50 9 PRESENTATION Il est destiné à assurer le maintien et le blocage en position extrême de la tige du vérin sous charge lors
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
LE GÉNIE PARASISMIQUE
 LE GÉNIE PARASISMIQUE Concevoir et construire un bâtiment pour qu il résiste aux séismes 1 Présentation de l intervenant Activité : Implantation : B.E.T. structures : Ingénierie générale du bâtiment. Siège
LE GÉNIE PARASISMIQUE Concevoir et construire un bâtiment pour qu il résiste aux séismes 1 Présentation de l intervenant Activité : Implantation : B.E.T. structures : Ingénierie générale du bâtiment. Siège
DERAILLEUR AVANT SR / R / CH - GAMME ACTUELLE
 DERAILLEUR AVANT SR / R / CH - GAMME ACTUELLE 1 - SPÉCIFICITÉS TECHNIQUES 55 2 - COMPATIBILITÉ (GAMME ACTUELLE) ATTENTION! Les associations différentes de celles figurant dans le tableau pourraient entraîner
DERAILLEUR AVANT SR / R / CH - GAMME ACTUELLE 1 - SPÉCIFICITÉS TECHNIQUES 55 2 - COMPATIBILITÉ (GAMME ACTUELLE) ATTENTION! Les associations différentes de celles figurant dans le tableau pourraient entraîner
(ANALYSE FONCTIONNELLE ET STRUCTURELLE)
") DOSSIER (ANALYSE FONCTIONNELLE ET STRUCTURELLE) Diagramme pieuvre. Diagramme F.A.S.T. Nomenclature Dessin d ensemble Vue éclatée Ce dossier comprend : 1. Recherche du Besoin Fondamental du Produit A qui
DOSSIER (ANALYSE FONCTIONNELLE ET STRUCTURELLE) Diagramme pieuvre. Diagramme F.A.S.T. Nomenclature Dessin d ensemble Vue éclatée Ce dossier comprend : 1. Recherche du Besoin Fondamental du Produit A qui
BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE SUJET
 SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Sommaire Table des matières
 Notice de montage 1 Sommaire Table des matières I. Mise en garde... 3 II. Avant de commencer... 4 1. Préparer vos outils... 4 2. Pièces nécessaires pour le montage de votre porte Keritek... 5 III. Étape
Notice de montage 1 Sommaire Table des matières I. Mise en garde... 3 II. Avant de commencer... 4 1. Préparer vos outils... 4 2. Pièces nécessaires pour le montage de votre porte Keritek... 5 III. Étape
Jean-Marc Schaffner Ateliers SCHAFFNER. Laure Delaporte ConstruirAcier. Jérémy Trouart Union des Métalliers
 Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
HELIOS UNITÉ SUSPENDUE
 HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Instructions de montage et d utilisation
 Instructions de montage et d utilisation TOUR ESCALIERS - 2 - SOMMAIRE SOMMAIRE...- 3 - TOUR ESCALIERS : CONFIGURATION 6 M...- 4-1. CARACTERISTIQUES GENERALES :...- 4 - Caractéristiques dimensionnelles
Instructions de montage et d utilisation TOUR ESCALIERS - 2 - SOMMAIRE SOMMAIRE...- 3 - TOUR ESCALIERS : CONFIGURATION 6 M...- 4-1. CARACTERISTIQUES GENERALES :...- 4 - Caractéristiques dimensionnelles
Le maçon à son poste de travail
 Fiche Prévention - E2 F 03 14 Le maçon à son poste de travail Partie 2 : la protection face au vide La réalisation de murs en maçonnerie est une opération courante sur les chantiers du bâtiment (maison
Fiche Prévention - E2 F 03 14 Le maçon à son poste de travail Partie 2 : la protection face au vide La réalisation de murs en maçonnerie est une opération courante sur les chantiers du bâtiment (maison
LES ESCALIERS. Les mots de l escalier
 Les mots de l escalier L escalier :ouvrage constitué d une suite régulière de plans horizontaux (marches et paliers) permettant, dans une construction, de passer à pied d un étage à un autre. L emmarchement
Les mots de l escalier L escalier :ouvrage constitué d une suite régulière de plans horizontaux (marches et paliers) permettant, dans une construction, de passer à pied d un étage à un autre. L emmarchement
WM-020-288-00-fr. Système de serrage point zéro SPEEDY airtec 1
 Système de serrage point zéro SPEEDY GO! Productivité maximale Le système de serrage point zéro SPEEDY airtec vous permet de maximiser le rendement de votre unité de production. Fini les opérations de
Système de serrage point zéro SPEEDY GO! Productivité maximale Le système de serrage point zéro SPEEDY airtec vous permet de maximiser le rendement de votre unité de production. Fini les opérations de
Glissière linéaire à rouleaux
 LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
LE TRAVAIL EN HAUTEUR
 F I C H E P R E V E N T I O N N 0 2 «H Y G I E N E S E C U R I T E» LE TRAVAIL EN HAUTEUR STATISTIQUES Avec près d une centaine d agent victime de chutes de hauteur durant les 5 dernières années dans les
F I C H E P R E V E N T I O N N 0 2 «H Y G I E N E S E C U R I T E» LE TRAVAIL EN HAUTEUR STATISTIQUES Avec près d une centaine d agent victime de chutes de hauteur durant les 5 dernières années dans les
systèmes d étagères Ergonomique, flexible, sûr. Le système modulaire pour pharmacies hospitalières et services d hôpitaux.
 systèmes d étagères Ergonomique, flexible, sûr. Le système modulaire pour pharmacies hospitalières et services d hôpitaux. Système d étagères FAMA : une flexibilité optimale pour un rendement maximal.
systèmes d étagères Ergonomique, flexible, sûr. Le système modulaire pour pharmacies hospitalières et services d hôpitaux. Système d étagères FAMA : une flexibilité optimale pour un rendement maximal.
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
MANUEL D INSTALLATION POUR EU-RAMPS
 Avertissement : Dans ce manuel d installation, le mot rampe est utilisé pour les modules inclinés et le mot plateforme pour les modules horizontaux. Généralités Commencer l installation par le point culminant
Avertissement : Dans ce manuel d installation, le mot rampe est utilisé pour les modules inclinés et le mot plateforme pour les modules horizontaux. Généralités Commencer l installation par le point culminant
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F)
") PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
NEOTECHA. Robinets à tournant sphérique - Modèles SNB et SNC
 NEOTECHA Robinet à tournant sphérique en acier inoxydable revêtu de PFA avec dimension face à face courte et conception sphère / tige avec tourillon arbrée éprouvée pour une utilisation dans les industries
NEOTECHA Robinet à tournant sphérique en acier inoxydable revêtu de PFA avec dimension face à face courte et conception sphère / tige avec tourillon arbrée éprouvée pour une utilisation dans les industries
PENDANTS à PLAFOND Pour USI/Anesthésie
 PENDANTS à PLAFOND Pour USI/Anesthésie Rigidité maximale et grande capacité Plages d'action presque illimités Modularité avec possibilité de choix Conception ergonomique Fiche complète de prises et access.
PENDANTS à PLAFOND Pour USI/Anesthésie Rigidité maximale et grande capacité Plages d'action presque illimités Modularité avec possibilité de choix Conception ergonomique Fiche complète de prises et access.
LE NOUVEAU SYSTEME DE BRAS PORTEUR
 LE NOUVEAU SYSTEME DE BRAS PORTEUR 28 Même conception Charges admissibles de 600 à 1 800 N Un ensemble complet et cohérent Même design Association possible de versions différentes horizontalement et verticalement
LE NOUVEAU SYSTEME DE BRAS PORTEUR 28 Même conception Charges admissibles de 600 à 1 800 N Un ensemble complet et cohérent Même design Association possible de versions différentes horizontalement et verticalement
TENONNEUSE SIMPLE CONVERPRO REF.921 D OCCASION
 TENONNEUSE SIMPLE CONVERPRO REF.921 D OCCASION Année de fabrication : Août 2008 Machine N : 03 3718 Vendeur : SCIERIE E. DUBREUIL Rue François Baron - BP 20-63390 SAINT GERVAIS D'AUVERGNE Téléphone : 04
TENONNEUSE SIMPLE CONVERPRO REF.921 D OCCASION Année de fabrication : Août 2008 Machine N : 03 3718 Vendeur : SCIERIE E. DUBREUIL Rue François Baron - BP 20-63390 SAINT GERVAIS D'AUVERGNE Téléphone : 04
Informations produits scalamobil S35 scalacombi S36
 Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Depuis 1927, spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles. Contacteurs électriques
 , spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles Contacteurs électriques " tournants Pour commander Téléphone 01 48 78 81 97 Fax 01 45 96 07 90
, spécialiste des composants pour les machines tournantes et le rebobinage. Alimentation d'engins mobiles Contacteurs électriques " tournants Pour commander Téléphone 01 48 78 81 97 Fax 01 45 96 07 90
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
PROTECTIONS COLLECTIVES
 PROTECTIONS COLLECTIVES SOMMAIRE PROTECTIONS COLLECTIVES DE RIVES ET TOITURES presse rapide et ses consoles, protections avec poteaux, protection de rive par traversée de mur 3 CONSOLES POUR PLANCHERS
PROTECTIONS COLLECTIVES SOMMAIRE PROTECTIONS COLLECTIVES DE RIVES ET TOITURES presse rapide et ses consoles, protections avec poteaux, protection de rive par traversée de mur 3 CONSOLES POUR PLANCHERS
protection incendie Ouvrant de façade : Orcades
 protection incendie Ouvrant de façade : Orcades FTE 502 130 D Mai 2011 Orcades ouvrant de façade d amenée d air Avantages Esthétique soignée (grille Cyclades en façade intérieure en option). Bonne isolation
protection incendie Ouvrant de façade : Orcades FTE 502 130 D Mai 2011 Orcades ouvrant de façade d amenée d air Avantages Esthétique soignée (grille Cyclades en façade intérieure en option). Bonne isolation
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Aperçu. S35 Franchir les escaliers en toute sécurité.
 Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
Programmes Prioritaires Nationaux : Fumées de soudage. Y. CAROMEL - Contrôleur de sécurité
 Programmes Prioritaires Nationaux : Fumées de soudage Y. CAROMEL - Contrôleur de sécurité Règles essentielles de ventilation appliquées aux activités de soudage Y. CAROMEL - Contrôleur de sécurité Règles
Programmes Prioritaires Nationaux : Fumées de soudage Y. CAROMEL - Contrôleur de sécurité Règles essentielles de ventilation appliquées aux activités de soudage Y. CAROMEL - Contrôleur de sécurité Règles
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Panneau solaire ALDEN
 SOMMAIRE 1. Présentation... 1.1. Mise en situation... 1.2. Analyse du besoin... 4 1.. Problématique... 4 1.4. Expression du besoin... 5 1.5. Validation du besoin... 5 2. Analyse fonctionnelle... 2.1. Définition
SOMMAIRE 1. Présentation... 1.1. Mise en situation... 1.2. Analyse du besoin... 4 1.. Problématique... 4 1.4. Expression du besoin... 5 1.5. Validation du besoin... 5 2. Analyse fonctionnelle... 2.1. Définition
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Roulements à une rangée de billes de génération C. Information Technique Produit
 Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Z-Axis Compliance Device Compliance en z
 Compensation for different vertical positions Collision recognition in Z-direction Protection of parts and work pieces Monitoring of the insertion forces during assembly operations Monitoring of the picking
Compensation for different vertical positions Collision recognition in Z-direction Protection of parts and work pieces Monitoring of the insertion forces during assembly operations Monitoring of the picking
Nom : Groupe : Date : 1. Quels sont les deux types de dessins les plus utilisés en technologie?
 Nom : Groupe : Date : Verdict Chapitre 11 1 La communication graphique Pages 336 et 337 1. Quels sont les deux types de dessins les plus utilisés en technologie? Les dessins de fabrication. Les schémas.
Nom : Groupe : Date : Verdict Chapitre 11 1 La communication graphique Pages 336 et 337 1. Quels sont les deux types de dessins les plus utilisés en technologie? Les dessins de fabrication. Les schémas.
SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P
 SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P Fabrication de grandes séries avec une efficacité accrue Augmentez la qualité de vos pièces de précision, réduisez vos coûts unitaires et fabriquez
SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P Fabrication de grandes séries avec une efficacité accrue Augmentez la qualité de vos pièces de précision, réduisez vos coûts unitaires et fabriquez
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Les monte escaliers de MediTek La solution pour votre mobilité à votre domicile
 Les monte escaliers de MediTek La solution pour votre mobilité à votre domicile VOTRE INDEPENDANCE REGAGNEE PAR L EXCELLENCE DU NOUVEAU MONTE ESCALIER DE MEDITEK. Autrefois, quand monter un escalier était
Les monte escaliers de MediTek La solution pour votre mobilité à votre domicile VOTRE INDEPENDANCE REGAGNEE PAR L EXCELLENCE DU NOUVEAU MONTE ESCALIER DE MEDITEK. Autrefois, quand monter un escalier était
Mini projet n 1 DOSSIER DE CONCEPTION Clef USB
 Mini projet n 1 DOSSIER DE CONCEPTION Clef USB Dossier de conception 1/21 1. PRESENTATION GENERALE DU MINI PROJET 1.1 Contexte de l étude Situation existante avec un problème. Présentation de l objectif
Mini projet n 1 DOSSIER DE CONCEPTION Clef USB Dossier de conception 1/21 1. PRESENTATION GENERALE DU MINI PROJET 1.1 Contexte de l étude Situation existante avec un problème. Présentation de l objectif
Vanne " Tout ou Rien" à siège incliné Type 3353
 Vanne " Tout ou Rien" à siège incliné Type 3353 Application Vanne "Tout ou Rien" avec servomoteur pneumatique à piston Diamètre nominal DN 15 ( 1 2 ) à 50 (2 ) Pression nominale PN Plage de température
Vanne " Tout ou Rien" à siège incliné Type 3353 Application Vanne "Tout ou Rien" avec servomoteur pneumatique à piston Diamètre nominal DN 15 ( 1 2 ) à 50 (2 ) Pression nominale PN Plage de température
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TEST ET RÉGLAGE DES SUSPENSIONS
 TEST ET RÉGLAGE DES SUSPENSIONS Généralités En règle générale, toutes les suspensions pour les motos standard sont réglées pour un conducteur d'un poids moyen de 70 kg. Généralement, le poids moyen du
TEST ET RÉGLAGE DES SUSPENSIONS Généralités En règle générale, toutes les suspensions pour les motos standard sont réglées pour un conducteur d'un poids moyen de 70 kg. Généralement, le poids moyen du
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Manuel d utilisation A lire attentivement avant utilisation du relevage avant MX
 RELEVAGE AVANT MX R28 MX R38 Manuel d utilisation A lire attentivement avant utilisation du relevage avant MX FR 365176 AA -1011 Notice originale Cher utilisateur, Nous vous remercions de votre confiance
RELEVAGE AVANT MX R28 MX R38 Manuel d utilisation A lire attentivement avant utilisation du relevage avant MX FR 365176 AA -1011 Notice originale Cher utilisateur, Nous vous remercions de votre confiance
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
GL5 GLS5. Lève-personnes mobiles
 GL5 GLS5 Lève-personnes mobiles Lève-personnes mobile GL5 Les lève-personnes mobiles GL5 sont les alternatives au sol des appareils de levage fixés au plafond de la gamme de produits Guldmann. Depuis plus
GL5 GLS5 Lève-personnes mobiles Lève-personnes mobile GL5 Les lève-personnes mobiles GL5 sont les alternatives au sol des appareils de levage fixés au plafond de la gamme de produits Guldmann. Depuis plus
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
XXXX F16D ACCOUPLEMENTS POUR LA TRANSMISSION DES MOUVEMENTS DE ROTATION; EMBRAYAGES; FREINS [2]
![XXXX F16D ACCOUPLEMENTS POUR LA TRANSMISSION DES MOUVEMENTS DE ROTATION; EMBRAYAGES; FREINS [2]](/thumbs/20/579952.jpg "XXXX F16D ACCOUPLEMENTS POUR LA TRANSMISSION DES MOUVEMENTS DE ROTATION; EMBRAYAGES; FREINS [2]") XXXX F16D F16D F16 ÉLÉMENTS OU ENSEMBLES DE TECHNOLOGIE; MESURES GÉNÉRALES POUR ASSURER LE BON FONCTIONNEMENT DES MACHINES OU INSTALLATIONS; ISOLATION THERMIQUE EN GÉNÉRAL F16D XXXX F16D ACCOUPLEMENTS
XXXX F16D F16D F16 ÉLÉMENTS OU ENSEMBLES DE TECHNOLOGIE; MESURES GÉNÉRALES POUR ASSURER LE BON FONCTIONNEMENT DES MACHINES OU INSTALLATIONS; ISOLATION THERMIQUE EN GÉNÉRAL F16D XXXX F16D ACCOUPLEMENTS
Mur double - appui plancher béton sur linteau Cellumat. 1/Détail: mur double appui hourdis béton sur linteau Cellumat
 Détails 1. Mur double - appui plancher béton sur linteau Cellumat 1/Détail: mur double appui hourdis béton sur linteau Cellumat Crochet type mur sec Mortier Membrane d'étanchéite Chaînage béton Brique
Détails 1. Mur double - appui plancher béton sur linteau Cellumat 1/Détail: mur double appui hourdis béton sur linteau Cellumat Crochet type mur sec Mortier Membrane d'étanchéite Chaînage béton Brique
Baccalauréat technologique annale zéro
 éduscol Baccalauréat technologique STI2D Enseignements technologiques transversaux Annale zéro n 2 (Coefficient 8 Durée 4 heures) Aucun document autorisé Calculatrice autorisée ÉTUDE DU BARRAGE DU MONT
éduscol Baccalauréat technologique STI2D Enseignements technologiques transversaux Annale zéro n 2 (Coefficient 8 Durée 4 heures) Aucun document autorisé Calculatrice autorisée ÉTUDE DU BARRAGE DU MONT
AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS. A déplacement manuel : Power Tower et Nano. Automotrices. Nano SP
 AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS A déplacement manuel : Power Tower et Nano Automotrices Nano SP LE GUIDE DE L ÉLÉVATION À FAIBLE HAUTEUR Qu est ce que le low level access ( l élévation
AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS A déplacement manuel : Power Tower et Nano Automotrices Nano SP LE GUIDE DE L ÉLÉVATION À FAIBLE HAUTEUR Qu est ce que le low level access ( l élévation
Gymnastique Rythmique HELP DESK
 Gymnastique Rythmique HELP DESK Ce «Help Desk» de Gymnastique Rythmique est conçu pour éclaircir et illustrer à l aide d exemples, les diverses normes du Code de Pointage de Gymnastique Rythmique. Le propos
Gymnastique Rythmique HELP DESK Ce «Help Desk» de Gymnastique Rythmique est conçu pour éclaircir et illustrer à l aide d exemples, les diverses normes du Code de Pointage de Gymnastique Rythmique. Le propos
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
STRUCTURE D UN AVION
 STRUCTURE D UN AVION Cette partie concerne plus la technique de l avion. Elle va vous permettre de connaître le vocabulaire propre à l avion. Celui ci vous permettra de situer plus facilement telle ou
STRUCTURE D UN AVION Cette partie concerne plus la technique de l avion. Elle va vous permettre de connaître le vocabulaire propre à l avion. Celui ci vous permettra de situer plus facilement telle ou
OCEANE Machine de brasage double vague
 Information générale Un concept de machine qui offre une performance remarquable, machine spécialement conçue pour les petites et moyennes séries, idéal pour toutes les exigences de production. Tout le
Information générale Un concept de machine qui offre une performance remarquable, machine spécialement conçue pour les petites et moyennes séries, idéal pour toutes les exigences de production. Tout le
Sanitaires Lavabo accessible
 Fiche H.11 Objet de la fiche Rappeler les dispositions de l arrêté pour l application, aux sanitaires, des articles R.111-19 à R.111-19- 3 ; R.111-19-6, R.111-19-8 et R.111-19-11 du code de la construction
Fiche H.11 Objet de la fiche Rappeler les dispositions de l arrêté pour l application, aux sanitaires, des articles R.111-19 à R.111-19- 3 ; R.111-19-6, R.111-19-8 et R.111-19-11 du code de la construction
Système de bridage rapide main-robot «QL»
 ELEMENTS DE PREHENSION 4 170 Principe général valable pour tous les modèles Élément femelle côté préhenseur Pour permettre le changement rapide des systèmes de préhension, les systèmes de bridages rapides
ELEMENTS DE PREHENSION 4 170 Principe général valable pour tous les modèles Élément femelle côté préhenseur Pour permettre le changement rapide des systèmes de préhension, les systèmes de bridages rapides
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Appareil de type fauteuil monte-escalier
 modèle 80 Appareil de type fauteuil monte-escalier Fonctionne sur batteries points de chargement en haut et en bas, alarme sonore si l'appareil n'est pas stationné sur le plot de chargement. Programmation
modèle 80 Appareil de type fauteuil monte-escalier Fonctionne sur batteries points de chargement en haut et en bas, alarme sonore si l'appareil n'est pas stationné sur le plot de chargement. Programmation
Soit la fonction affine qui, pour représentant le nombre de mois écoulés, renvoie la somme économisée.
 ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
TOUT CE QU IL FAUT SAVOIR POUR LE BREVET
 TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
Les connexions. Multifonctions. Avantage. Forme ronde et non carrée :
 Les connexions Multifonctions Avantage Forme ronde et non carrée : En plus d une esthétique agréable et assortie à la forme ronde des tubes et joints LeanTek, la forme arrondie des F-M Trilogiq permet
Les connexions Multifonctions Avantage Forme ronde et non carrée : En plus d une esthétique agréable et assortie à la forme ronde des tubes et joints LeanTek, la forme arrondie des F-M Trilogiq permet
Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]
![Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]](/thumbs/20/424260.jpg "Les moments de force. Ci-contre, un schéma du submersible MIR où l on voit les bras articulés pour la récolte d échantillons [ 1 ]") Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
Les moments de force Les submersibles Mir peuvent plonger à 6 000 mètres, rester en immersion une vingtaine d heures et abriter 3 personnes (le pilote et deux observateurs), dans une sphère pressurisée
MANUEL D UTILISATION MODE D EMPLOI ALT 600 MODE D EMPLOI ALT 600 FABRICANT DE MATERIEL SCENIQUE
 1. Présentation. FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION La société ASD est spécialisée dans la conception et le développement de systèmes de levage spécifique à l environnement du spectacle
1. Présentation. FABRICANT DE MATERIEL SCENIQUE MANUEL D UTILISATION La société ASD est spécialisée dans la conception et le développement de systèmes de levage spécifique à l environnement du spectacle
Centreur fin cylindrique pour la fabrication de moules. Le développement
 Le développement Centreur fin cylindrique pour la fabrication de moules Avantages Durabilité: pour la production de grandes séries Sans jeu pour un alignement précis du moule Temps de cycle plus courts
Le développement Centreur fin cylindrique pour la fabrication de moules Avantages Durabilité: pour la production de grandes séries Sans jeu pour un alignement précis du moule Temps de cycle plus courts
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
ECR58 PLUS, ECR88 PLUS
 More care. Built in. PELLES COMPACTES VOLVO ECR58 PLUS, ECR88 PLUS La meilleure façon d accéder aux endroits Exigus. Lorsque votre travail vous conduit vers un endroit où l espace est limité, optez pour
More care. Built in. PELLES COMPACTES VOLVO ECR58 PLUS, ECR88 PLUS La meilleure façon d accéder aux endroits Exigus. Lorsque votre travail vous conduit vers un endroit où l espace est limité, optez pour