I. Comment choisir le référentiel d étude?
|
|
|
- Basile Carignan
- il y a 6 ans
- Total affichages :
Transcription

 mais peut-être généralisée aux espaces à trois dimensions. I. Comment choisir le référentiel d étude? 1.")
1 CHAPITRE N 1 PARTIE B LES OUTILS DE LA MECANIQUE CLASSIQUE TS Introduction Afin de décrire le mouement d un objet, il faut définir le système étudié et préciser le référentiel d étude. On se limitera à des systèmes de dimensions très faibles par rapport à celle de leurs déplacements. Un tel système est modélisé par un point unique, qui contiendrait toute sa masse : on parle du modèle du point matériel. Pour simplifier les écritures, l étude est limitée aux mouements plans (à deux dimensions) mais peut-être généralisée aux espaces à trois dimensions. I. Comment choisir le référentiel d étude? 1. Notion de référentiel Un référentiel est un objet par rapport auquel on étudie le mouement Attention a na pas confondre le référentiel géocentrique (lié au centre de la terre) et le référentiel terrestre (lié à un objet fixe à la surface de la terre) A ce référentiel sont attachés 2 repères : - un repère d espace, choisi de tel sorte que la description du mouement soit la plus simple possible - Un repère de temps : l origine des dates est souent choisie afin de coïncider aec le début du mouement. 1

2 2. Notion de repère d espace Le repère cartésien (O; i, j, k ) Il a pour origine un point O fixe et pour ecteurs unitaire les ecteurs i, j et k constant Le repère de frenet (M; τ, n ) Pour traiter les mouements circulaires il est souent plus simple d utiliser un autre repère : il s agit du repère de Frenet Le repère de Frenet a pour origine le point M en mouement et comporte 2 ecteurs unitaire τ et n associé au point M décriant une courbe - - τ ecteur tangent à la trajectoire et dans le sens du mouement n ecteur centripète en M et normal à la trajectoire (perpendiculaire à τ ) dirigé ers le centre du cercle O. Les deux axes tournent au même temps que le point matériel le long de sa trajectoire. 3. Centre d inertie Quand un solide est en mouement de chute, il existe un point de ce solide qui décrit un mouement plus simple que les autres : le centre d inertie, noté G. Lorsque l étude du mouement d un solide est réduite à celle de son centre d inertie, les informations relaties à la rotation du solide sur lui-même sont perdues. II. Quels outils pour décrire le mouement? 1. Le ecteur position Dans un référentiel donné, la position d un point M est repéré à chaque instant par le ecteur position OM Dans le repère (O, i, j, k ) le ecteur position OM à pour coordonnée : OM(t) = x(t) i +y(t) j + z(t) k Soit : OM : x(t) y(t) z(t) Ces trois coordonnées sont fonctions du temps et pour simplifier les notations, on pourra écrire : OM = x i + y j + z k et : OM : On pourra simplifier de même l écriture des grandeurs dépendant du temps. x y z 2
3 2. Le ecteur itesse Vitesse moyenne La itesse moyenne d un point entre deux positions est la distance parcourue diisée par la durée du parcours Le ecteur itesse moyenne d un point M à l instant t i lorsqu il passe par la position M i est donné par la relation : (t i ) = M i-1 M i+1 aec =2τ Or M i-1 M i+1 = OM i+1 OM i-1 = OM i D où: (t i ) = OM i Vitesse instantanée La itesse instantanée du point est égale à sa itesse moyenne entre deux positions infiniment proches, soit lorsque tend ers 0. Par définition, le ecteur itesse instantanée (t) est donc égal à la limite de OM lorsque tend ers zéro : (t i )= lim 0 OM i = d OM (t i ) dom (t i ) représente la dériée du ecteur position OM par rapport au temps à la date t i Dans un référentiel donné, à toute date t, le ecteur itesse instantanée d un point M est égale à la dériée par rapport au temps du ecteur position OM : = d OM Dans le repère (O ; i, j, k ), les coordonnées du ecteur itesse (t) sont : = x i + y j + z k = dx i + dy j + dz k soit: : x = dx y = dy z = dz Le ecteur itesse instantanée en un point de la trajectoire a les caractéristiques suiantes : Origine : position M(t) occupé à l instant t par le point mobile M Direction : la tangente à la trajectoire au point M(t). Sens : celui du mouement. Valeur ou norme : (t) = x ² + y ² + z ² en m.s - 1 Remarque : A chaque instant le coefficient directeur de la tangente à la courbe x=f(t) donne la aleur de la itesse x. Voir FICHE METHODE Vitesse et dériée 3
4 3. Le ecteur accélération Le ecteur accélération caractérise la ariation du ecteur itesse en fonction du temps. Le ecteur accélération d un point M à l instant t i lorsqu il passe par la position M i est donné par la relation : a (t i ) = i+1 - i-1 aec =2τ Or i+1 i-1 = d où a (t i ) = Par définition, le ecteur accélération a i (t) est égal à la limite de i lorsque t tend ers zéro : a (t i )= lim i 0 = d (t i ) i d (t i ) représente la dériée du ecteur itesse par rapport au temps à la date t i Dans un référentiel donné, à toute date t, le ecteur accélération d un point M est égale à la dériée par rapport au temps du ecteur itesse instantanée : a = d Soit : a (t) = d = d d OM = d² OM ² Dans le repère (O ; i, j, k ), les coordonnées du ecteur accélération a (t) sont : a = a x i + a y j + a z k a = d x a = d²x ² i + d y i + d²y ² j + d z j + d²z ² k k soit: a (t): a x (t) = d x = d²x ² a y (t) = d y = d²y ² a z (t) = d z = d²z ² Le ecteur accélération en un point de la trajectoire a les caractéristiques suiantes : Origine : position M(t) occupé à l instant t par le point mobile M Direction : celle du ecteur Sens : celui du ecteur Valeur ou norme : a (t) = a x ² + a y ² + a z ² en m.s - ² Remarque : A chaque instant le coefficient directeur de la tangente à la courbe x =f(t) donne la aleur de l accélération a x. 4

5 4. Bilan : 5. Le ecteur quantité de mouement. Définition Deux balles de masses différentes et lancées aec la même itesse ne parcourent pas la même distance. La masse est une caractéristique inariable d un système et elle interient dans une nouelle grandeur deenue nécessaire pour étudier le mouement : la quantité de mouement. Le ecteur quantité de mouement p d un point matériel est égal au produit de sa masse m par son ecteur itesse : p = m. Le ecteur quantité de mouement d un point matériel a les caractéristiques suiantes : Origine : position M(t) occupé à l instant t par le point mobile M Direction : celle du ecteur itesse Sens : celui du ecteur Valeur ou norme : p (t) =m. (t) = en kg.m.s -1 Remarque : La quantité de mouement p d un système constitué de plusieurs corps est égale à la somme des quantités de mouement de chacun des corps du système : p = p 1 + p 2 + = Loi de conseration de la quantité de mouement La loi de conseration de la quantité de mouement est une loi fondamentale de la mécanique qui permet d étudier le cas d un système isolé* ou pseudo isolé** constitué de plusieurs corps, qu il soit déformable ou non Dans un référentielle galiléen, le ecteur quantité de mouement d un système isolé ou pseudo isolé est un ecteur constant : p = p 1 + p 2 + = n i=1 n i=1 p i p i = cst *Un système est dit isolé s il n est soumis à aucune action mécanique extérieure. **Un système est pseudo isolé si les actions mécaniques qui s exercent sur lui se compensent. 5

6 Application à la propulsion par réaction 6

7 II. Mouements rectilignes et circulaires 7
8 III. Les lois de Newton 1. Première loi de Newton : énoncé du principe d inertie : Dans un référentiel galiléen, si la somme des forces extérieures appliquées à un système mécanique est nulle, son centre d inertie G est au repos ou a un mouement rectiligne uniforme. La réciproque est raie, d où : F ext = 0 est équialent à G = cst La première loi de Newton ne s applique qu au centre d inertie du solide. Elle ne dit rien sur le mouement des autres points. Le principe d inertie ne s applique que dans certain référentiels appelés galiléens. Pour une expérience de courte durée le référentiel terrestre est considéré comme galiléen. Un référentiel est galiléen si le principe d inertie est érifié. 2. La deuxième loi de Newton (principe fondamental de la dynamique) : Dans un référentiel Galiléen, la somme ectorielle des forces extérieures exercées sur un système mécanique de masse m est égale à la dériée par rapport au temps de son ecteur quantité de mouement p(t) p G F ext = d (t) Si la masse du système est constante cette relation deient : F ext = d ( m. G ) F ext =m = m. d G a G Si F ext = 0 alors a G = 0 et, par conséquent, G reste constant en direction, sens et norme (on retroue la première loi de Newton). 3. La troisième loi de newton : principe des actions réciproques Deux corps en interaction exercent l un sur l autre des forces opposées : La force F A/B exercée par le corps A sur le corps B et la force F B/A exercée par le corps B sur le corps A ont même direction, même aleur mais des sens opposés : F A/B = - F B/A 8

9 9
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
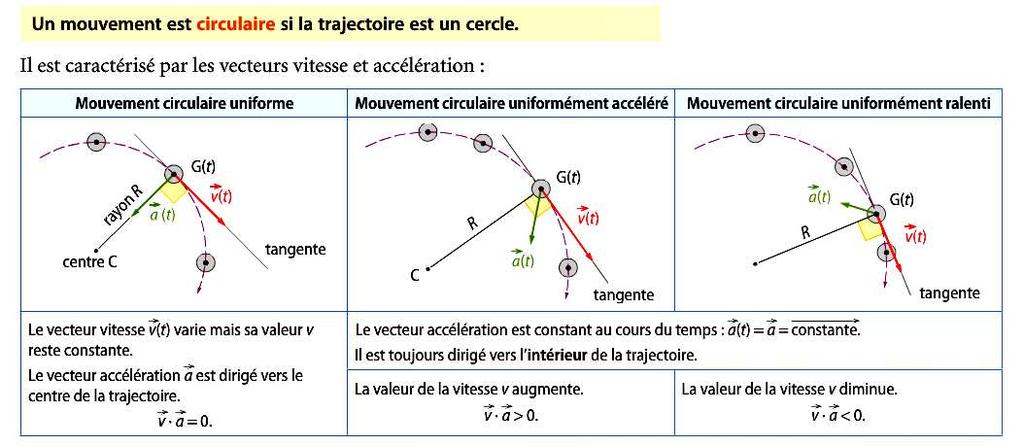
C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position OM est constant et il est égal au
 1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique
 + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique") DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
DM n o 8 TS1 2012 Physique 10 (satellites) + Chimie 12 (catalyse) Exercice 1 Lancement d un satellite météorologique Le centre spatial de Kourou a lancé le 21 décembre 200, avec une fusée Ariane, un satellite
Chapitre 7 - Relativité du mouvement
 Un bus roule lentement dans une ville. Alain (A) est assis dans le bus, Brigitte (B) marche dans l'allée vers l'arrière du bus pour faire des signes à Claude (C) qui est au bord de la route. Brigitte marche
Un bus roule lentement dans une ville. Alain (A) est assis dans le bus, Brigitte (B) marche dans l'allée vers l'arrière du bus pour faire des signes à Claude (C) qui est au bord de la route. Brigitte marche
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Nombre dérivé et tangente
 Nombre dérivé et tangente I) Interprétation graphique 1) Taux de variation d une fonction en un point. Soit une fonction définie sur un intervalle I contenant le nombre réel a, soit (C) sa courbe représentative
Nombre dérivé et tangente I) Interprétation graphique 1) Taux de variation d une fonction en un point. Soit une fonction définie sur un intervalle I contenant le nombre réel a, soit (C) sa courbe représentative
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux. - Section Audioprothésiste / stage i-prépa intensif -
 POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
Cours Fonctions de deux variables
 Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Mécanique : Cinématique du point. Chapitre 1 : Position. Vitesse. Accélération
 2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
2 e B et C 1 Position. Vitesse. Accélération 1 Mécanique : Cinéatique du point La écanique est le doaine de tout ce qui produit ou transet un ouveent, une force, une déforation : achines, oteurs, véhicules,
La gravitation universelle
 La gravitation universelle Pourquoi les planètes du système solaire restent-elles en orbite autour du Soleil? 1) Qu'est-ce que la gravitation universelle? activité : Attraction universelle La cohésion
La gravitation universelle Pourquoi les planètes du système solaire restent-elles en orbite autour du Soleil? 1) Qu'est-ce que la gravitation universelle? activité : Attraction universelle La cohésion
Mécanique. Chapitre 4. Mécanique en référentiel non galiléen
 Mécanique Chapitre 4 Mécanique en référentiel non galiléen I Référentiel en translation Mécanique en référentiel non galiléen Jusqu à présent, nous avons fait de la mécanique du point dans un référentiel
Mécanique Chapitre 4 Mécanique en référentiel non galiléen I Référentiel en translation Mécanique en référentiel non galiléen Jusqu à présent, nous avons fait de la mécanique du point dans un référentiel
MATIE RE DU COURS DE PHYSIQUE
 MATIE RE DU COURS DE PHYSIQUE Titulaire : A. Rauw 5h/semaine 1) MÉCANIQUE a) Cinématique ii) Référentiel Relativité des notions de repos et mouvement Relativité de la notion de trajectoire Référentiel
MATIE RE DU COURS DE PHYSIQUE Titulaire : A. Rauw 5h/semaine 1) MÉCANIQUE a) Cinématique ii) Référentiel Relativité des notions de repos et mouvement Relativité de la notion de trajectoire Référentiel
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
Notes du cours MTH1101 Calcul I Partie II: fonctions de plusieurs variables Guy Desaulniers Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2014 Table des matières
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
Dérivation : cours. Dérivation dans R
 TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
TS Dérivation dans R Dans tout le capitre, f désigne une fonction définie sur un intervalle I de R (non vide et non réduit à un élément) et à valeurs dans R. Petits rappels de première Téorème-définition
DÉRIVÉES. I Nombre dérivé - Tangente. Exercice 01 (voir réponses et correction) ( voir animation )
 ( voir animation )") DÉRIVÉES I Nombre dérivé - Tangente Eercice 0 ( voir animation ) On considère la fonction f définie par f() = - 2 + 6 pour [-4 ; 4]. ) Tracer la représentation graphique (C) de f dans un repère d'unité
DÉRIVÉES I Nombre dérivé - Tangente Eercice 0 ( voir animation ) On considère la fonction f définie par f() = - 2 + 6 pour [-4 ; 4]. ) Tracer la représentation graphique (C) de f dans un repère d'unité
Système formé de deux points
 MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
MPSI - 2005/2006 - Mécanique II - Système formé de deux points matériels page /5 Système formé de deux points matériels Table des matières Éléments cinétiques. Éléments cinétiques dans R.......................2
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Développements limités, équivalents et calculs de limites
 Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
Développements ités, équivalents et calculs de ites Eercice. Déterminer le développement ité en 0 à l ordre n des fonctions suivantes :. f() e (+) 3 n. g() sin() +ln(+) n 3 3. h() e sh() n 4. i() sin(
TD de Physique n o 1 : Mécanique du point
 E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Chapitre 3. Quelques fonctions usuelles. 1 Fonctions logarithme et exponentielle. 1.1 La fonction logarithme
 Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Chapitre 3 Quelques fonctions usuelles 1 Fonctions logarithme et eponentielle 1.1 La fonction logarithme Définition 1.1 La fonction 7! 1/ est continue sur ]0, +1[. Elle admet donc des primitives sur cet
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
a et b étant deux nombres relatifs donnés, une fonction affine est une fonction qui a un nombre x associe le nombre ax + b
 I Définition d une fonction affine Faire l activité 1 «une nouvelle fonction» 1. définition générale a et b étant deux nombres relatifs donnés, une fonction affine est une fonction qui a un nombre x associe
I Définition d une fonction affine Faire l activité 1 «une nouvelle fonction» 1. définition générale a et b étant deux nombres relatifs donnés, une fonction affine est une fonction qui a un nombre x associe
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables
 Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Notes du cours MTH1101N Calcul I Partie II: fonctions de plusieurs variables Fausto Errico Département de mathématiques et de génie industriel École Polytechnique de Montréal Automne 2012 Table des matières
Initiation à la Mécanique des Fluides. Mr. Zoubir HAMIDI
 Initiation à la Mécanique des Fluides Mr. Zoubir HAMIDI Chapitre I : Introduction à la mécanique des fluides 1 Introduction La mécanique des fluides(mdf) a pour objet l étude du comportement des fluides
Initiation à la Mécanique des Fluides Mr. Zoubir HAMIDI Chapitre I : Introduction à la mécanique des fluides 1 Introduction La mécanique des fluides(mdf) a pour objet l étude du comportement des fluides
Une technologie ludique
 Une technologie ludique Rémi stavrakas, Patricia chabert [1] C est à partir d un support bien connu de nos élèves, la manette de la Wii, la console de jeu de Nintendo, qu une équipe pédagogique de l académie
Une technologie ludique Rémi stavrakas, Patricia chabert [1] C est à partir d un support bien connu de nos élèves, la manette de la Wii, la console de jeu de Nintendo, qu une équipe pédagogique de l académie
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
DYNAMIQUE DE FORMATION DES ÉTOILES
 A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites
 I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
Chap 8 - TEMPS & RELATIVITE RESTREINTE
 Chap 8 - TEMPS & RELATIVITE RESTREINTE Exercice 0 page 9 On considère deux évènements E et E Référentiel propre, R : la Terre. Dans ce référentiel, les deux évènements ont lieu au même endroit. La durée
Chap 8 - TEMPS & RELATIVITE RESTREINTE Exercice 0 page 9 On considère deux évènements E et E Référentiel propre, R : la Terre. Dans ce référentiel, les deux évènements ont lieu au même endroit. La durée
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
TOUT CE QU IL FAUT SAVOIR POUR LE BREVET
 TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
La notion de temps. par Jean Kovalevsky, membre de l'institut *
 La notion de temps par Jean Kovalevsky, membre de l'institut * Introduction : le temps classique Nous avons de la notion de temps une connaissance primaire, vivant dans un présent coincé entre un passé
La notion de temps par Jean Kovalevsky, membre de l'institut * Introduction : le temps classique Nous avons de la notion de temps une connaissance primaire, vivant dans un présent coincé entre un passé
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX
 SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
Comparaison de fonctions Développements limités. Chapitre 10
 PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
PCSI - 4/5 www.ericreynaud.fr Chapitre Points importants 3 Questions de cours 6 Eercices corrigés Plan du cours 4 Eercices types 7 Devoir maison 5 Eercices Chap Et s il ne fallait retenir que si points?
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Limites finies en un point
 8 Limites finies en un point Pour ce chapitre, sauf précision contraire, I désigne une partie non vide de R et f une fonction définie sur I et à valeurs réelles ou complees. Là encore, les fonctions usuelles,
8 Limites finies en un point Pour ce chapitre, sauf précision contraire, I désigne une partie non vide de R et f une fonction définie sur I et à valeurs réelles ou complees. Là encore, les fonctions usuelles,
Développements limités. Notion de développement limité
 MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
MT12 - ch2 Page 1/8 Développements limités Dans tout ce chapitre, I désigne un intervalle de R non vide et non réduit à un point. I Notion de développement limité Dans tout ce paragraphe, a désigne un
3. Conditionnement P (B)
") Conditionnement 16 3. Conditionnement Dans cette section, nous allons rappeler un certain nombre de définitions et de propriétés liées au problème du conditionnement, c est à dire à la prise en compte
Conditionnement 16 3. Conditionnement Dans cette section, nous allons rappeler un certain nombre de définitions et de propriétés liées au problème du conditionnement, c est à dire à la prise en compte
LES APPAREILS A DEVIATION EN COURANT CONTINU ( LES APPREILS MAGNETOELECTRIQUES)
") Chapitre 3 LES APPARELS A DEVATON EN COURANT CONTNU ( LES APPRELS MAGNETOELECTRQUES) - PRNCPE DE FONCTONNEMENT : Le principe de fonctionnement d un appareil magnéto-électrique est basé sur les forces agissant
Chapitre 3 LES APPARELS A DEVATON EN COURANT CONTNU ( LES APPRELS MAGNETOELECTRQUES) - PRNCPE DE FONCTONNEMENT : Le principe de fonctionnement d un appareil magnéto-électrique est basé sur les forces agissant
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Circuits RL et RC. Chapitre 5. 5.1 Inductance
 Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
Chapitre 5 Circuits RL et RC Ce chapitre présente les deux autres éléments linéaires des circuits électriques : l inductance et la capacitance. On verra le comportement de ces deux éléments, et ensuite
8.1 Généralités sur les fonctions de plusieurs variables réelles. f : R 2 R (x, y) 1 x 2 y 2
 1 x 2 y 2") Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Chapitre 8 Fonctions de plusieurs variables 8.1 Généralités sur les fonctions de plusieurs variables réelles Définition. Une fonction réelle de n variables réelles est une application d une partie de R
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
SYSTEME DE PARTICULES. DYNAMIQUE DU SOLIDE (suite) Table des matières
 Table des matières") Physique Générale SYSTEME DE PARTICULES DYNAMIQUE DU SOLIDE (suite) TRAN Minh Tâm Table des matières Applications de la loi de Newton pour la rotation 93 Le gyroscope........................ 93 L orbite
Physique Générale SYSTEME DE PARTICULES DYNAMIQUE DU SOLIDE (suite) TRAN Minh Tâm Table des matières Applications de la loi de Newton pour la rotation 93 Le gyroscope........................ 93 L orbite
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Problème 1 : applications du plan affine
 Problème 1 : applications du plan affine Notations On désigne par GL 2 (R) l ensemble des matrices 2 2 inversibles à coefficients réels. Soit un plan affine P muni d un repère (O, I, J). Les coordonnées
Problème 1 : applications du plan affine Notations On désigne par GL 2 (R) l ensemble des matrices 2 2 inversibles à coefficients réels. Soit un plan affine P muni d un repère (O, I, J). Les coordonnées
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Examen d informatique première session 2004
 Examen d informatique première session 2004 Le chiffre à côté du titre de la question indique le nombre de points sur 40. I) Lentille électrostatique à fente (14) Le problème étudié est à deux dimensions.
Examen d informatique première session 2004 Le chiffre à côté du titre de la question indique le nombre de points sur 40. I) Lentille électrostatique à fente (14) Le problème étudié est à deux dimensions.
= 1 si n = m& où n et m sont souvent des indices entiers, par exemple, n, m = 0, 1, 2, 3, 4... En fait,! n m
 1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 ère partie : tous CAP sauf hôtellerie et alimentation CHIMIE ETRE CAPABLE DE. PROGRAMME - Atomes : structure, étude de quelques exemples.
 Référentiel CAP Sciences Physiques Page 1/9 SCIENCES PHYSIQUES CERTIFICATS D APTITUDES PROFESSIONNELLES Le référentiel de sciences donne pour les différentes parties du programme de formation la liste
Référentiel CAP Sciences Physiques Page 1/9 SCIENCES PHYSIQUES CERTIFICATS D APTITUDES PROFESSIONNELLES Le référentiel de sciences donne pour les différentes parties du programme de formation la liste
Etude de fonctions: procédure et exemple
 Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Etude de fonctions: procédure et exemple Yves Delhaye 8 juillet 2007 Résumé Dans ce court travail, nous présentons les différentes étapes d une étude de fonction à travers un exemple. Nous nous limitons
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte
![MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte](/thumbs/19/247967.jpg "MECANIQUE DU POINT. y e y. z e z. ] est le trièdre de référence. e z. où [O, e r. r est la distance à l'axe, θ l'angle polaire et z la côte") I) Cinématique du point matériel: 1) Référentiel: MECANIQUE DU POINT L ensemble de tous les systèmes d axes de coordonnées liés à un même solide de référence S constitue un repère Soit une horloge permettant
I) Cinématique du point matériel: 1) Référentiel: MECANIQUE DU POINT L ensemble de tous les systèmes d axes de coordonnées liés à un même solide de référence S constitue un repère Soit une horloge permettant
Fonctions de plusieurs variables
 UNIVERSITÉ DE POITIERS Parcours Renforcé Première Année 2009/2010 Paul Broussous Fonctions de plusieurs variables Seconde version corrigée Table des matières 1. Un peu de topologie. 1.1. Distance euclidienne,
UNIVERSITÉ DE POITIERS Parcours Renforcé Première Année 2009/2010 Paul Broussous Fonctions de plusieurs variables Seconde version corrigée Table des matières 1. Un peu de topologie. 1.1. Distance euclidienne,
SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION)
") Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Chapitre 5 : Le travail d une force :
 Classe de 1èreS Chapitre 5 Physique Chapitre 5 : Le travail d une force : Introduction : fiche élève Considérons des objets qui subissent des forces dont le point d application se déplace : Par exemple
Classe de 1èreS Chapitre 5 Physique Chapitre 5 : Le travail d une force : Introduction : fiche élève Considérons des objets qui subissent des forces dont le point d application se déplace : Par exemple
SSLS116 - Chargement membranaire d une plaque excentrée
 Titre : SSLS116 - Excentrement de plaque. Chargement membr[...] Date : 11/03/2010 Page : 1/12 Manuel de Validation Fascicule V3.03 : Statique linéaire des plaques et coques Document : V3.03.116 SSLS116
Titre : SSLS116 - Excentrement de plaque. Chargement membr[...] Date : 11/03/2010 Page : 1/12 Manuel de Validation Fascicule V3.03 : Statique linéaire des plaques et coques Document : V3.03.116 SSLS116
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
Fonctions homographiques
 Seconde-Fonctions homographiques-cours Mai 0 Fonctions homographiques Introduction Voir le TP Géogébra. La fonction inverse. Définition Considérons la fonction f définie par f() =. Alors :. f est définie
Seconde-Fonctions homographiques-cours Mai 0 Fonctions homographiques Introduction Voir le TP Géogébra. La fonction inverse. Définition Considérons la fonction f définie par f() =. Alors :. f est définie
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
MODELES DE DUREE DE VIE
 MODELES DE DUREE DE VIE Cours 1 : Introduction I- Contexte et définitions II- Les données III- Caractéristiques d intérêt IV- Evènements non renouvelables/renouvelables (unique/répété) I- Contexte et définitions
MODELES DE DUREE DE VIE Cours 1 : Introduction I- Contexte et définitions II- Les données III- Caractéristiques d intérêt IV- Evènements non renouvelables/renouvelables (unique/répété) I- Contexte et définitions
Travaux dirigés de mécanique du point
 Travaux dirigés de mécanique du point Année 011-01 Arnaud LE PADELLEC Magali MOURGUES alepadellec@irap.omp.eu magali.mourgues@univ-tlse3.fr Travaux dirigés de mécanique du point 1/40 P r é s e n t a t
Travaux dirigés de mécanique du point Année 011-01 Arnaud LE PADELLEC Magali MOURGUES alepadellec@irap.omp.eu magali.mourgues@univ-tlse3.fr Travaux dirigés de mécanique du point 1/40 P r é s e n t a t
Université Mohammed Khidher Biskra A.U.: 2014/2015
 Uniersité Mohammed Khidher Biskra A.U.: 204/205 Faculté des sciences et de la technologie nseignant: Bekhouche Khaled Matière: lectronique Fondamentale hapitre 4 : Le Transistor Bipolaire à Jonction 4..
Uniersité Mohammed Khidher Biskra A.U.: 204/205 Faculté des sciences et de la technologie nseignant: Bekhouche Khaled Matière: lectronique Fondamentale hapitre 4 : Le Transistor Bipolaire à Jonction 4..
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Mécanique du Point Matériel
 LYCEE FAIDHERBE LILLE ANNEE SCOLAIRE 2010-2011 SUP PCSI2 JFA. Bange Mécanique du Point Matériel Plan A. Formulaire 1. Cinématique du point matériel 2. Dynamique du point matériel 3. Travail, énergie 4.
LYCEE FAIDHERBE LILLE ANNEE SCOLAIRE 2010-2011 SUP PCSI2 JFA. Bange Mécanique du Point Matériel Plan A. Formulaire 1. Cinématique du point matériel 2. Dynamique du point matériel 3. Travail, énergie 4.
Exercices - Fonctions de plusieurs variables : corrigé. Pour commencer
 Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Pour commencer Exercice 1 - Ensembles de définition - Première année - 1. Le logarithme est défini si x + y > 0. On trouve donc le demi-plan supérieur délimité par la droite d équation x + y = 0.. 1 xy
Texte Agrégation limitée par diffusion interne
 Page n 1. Texte Agrégation limitée par diffusion interne 1 Le phénomène observé Un fût de déchets radioactifs est enterré secrètement dans le Cantal. Au bout de quelques années, il devient poreux et laisse
Page n 1. Texte Agrégation limitée par diffusion interne 1 Le phénomène observé Un fût de déchets radioactifs est enterré secrètement dans le Cantal. Au bout de quelques années, il devient poreux et laisse
Propriétés électriques de la matière
 1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
Géométrie dans l espace Produit scalaire et équations
 Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Chapitre 11. 2ème partie Géométrie dans l espace Produit scalaire et équations Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES 2ème partie Produit scalaire Produit scalaire
Mesurer les altitudes avec une carte
 www.ign.fr > Espace éducatif > Les fiches thématiques > Lecture de la carte Mesurer les altitudes avec une carte Les cartes topographiques ne sont pas uniquement une représentation plane de la surface
www.ign.fr > Espace éducatif > Les fiches thématiques > Lecture de la carte Mesurer les altitudes avec une carte Les cartes topographiques ne sont pas uniquement une représentation plane de la surface
Fonctions de plusieurs variables. Sébastien Tordeux
 Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Fonctions de plusieurs variables Sébastien Tordeux 22 février 2009 Table des matières 1 Fonctions de plusieurs variables 3 1.1 Définition............................. 3 1.2 Limite et continuité.......................
Dérivation : Résumé de cours et méthodes
 Dérivation : Résumé de cours et métodes Nombre dérivé - Fonction dérivée : DÉFINITION (a + ) (a) Etant donné est une onction déinie sur un intervalle I contenant le réel a, est dérivable en a si tend vers
Dérivation : Résumé de cours et métodes Nombre dérivé - Fonction dérivée : DÉFINITION (a + ) (a) Etant donné est une onction déinie sur un intervalle I contenant le réel a, est dérivable en a si tend vers
I. Polynômes de Tchebychev
 Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
Première épreuve CCP filière MP I. Polynômes de Tchebychev ( ) 1.a) Tout réel θ vérifie cos(nθ) = Re ((cos θ + i sin θ) n ) = Re Cn k (cos θ) n k i k (sin θ) k Or i k est réel quand k est pair et imaginaire
LE PRODUIT SCALAIRE ( En première S )
") LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Structures algébriques
 Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Structures algébriques 1. Lois de composition s Soit E un ensemble. Une loi de composition interne sur E est une application de E E dans E. Soient E et F deux ensembles. Une loi de composition externe
Si deux droites sont parallèles à une même troisième. alors les deux droites sont parallèles entre elles. alors
 N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux