Noyau RTLinux. Noyau RTLinux
|
|
|
- Marcel Cartier
- il y a 8 ans
- Total affichages :
Transcription
1 Noyau RTLinux Noyau RTLinux 1
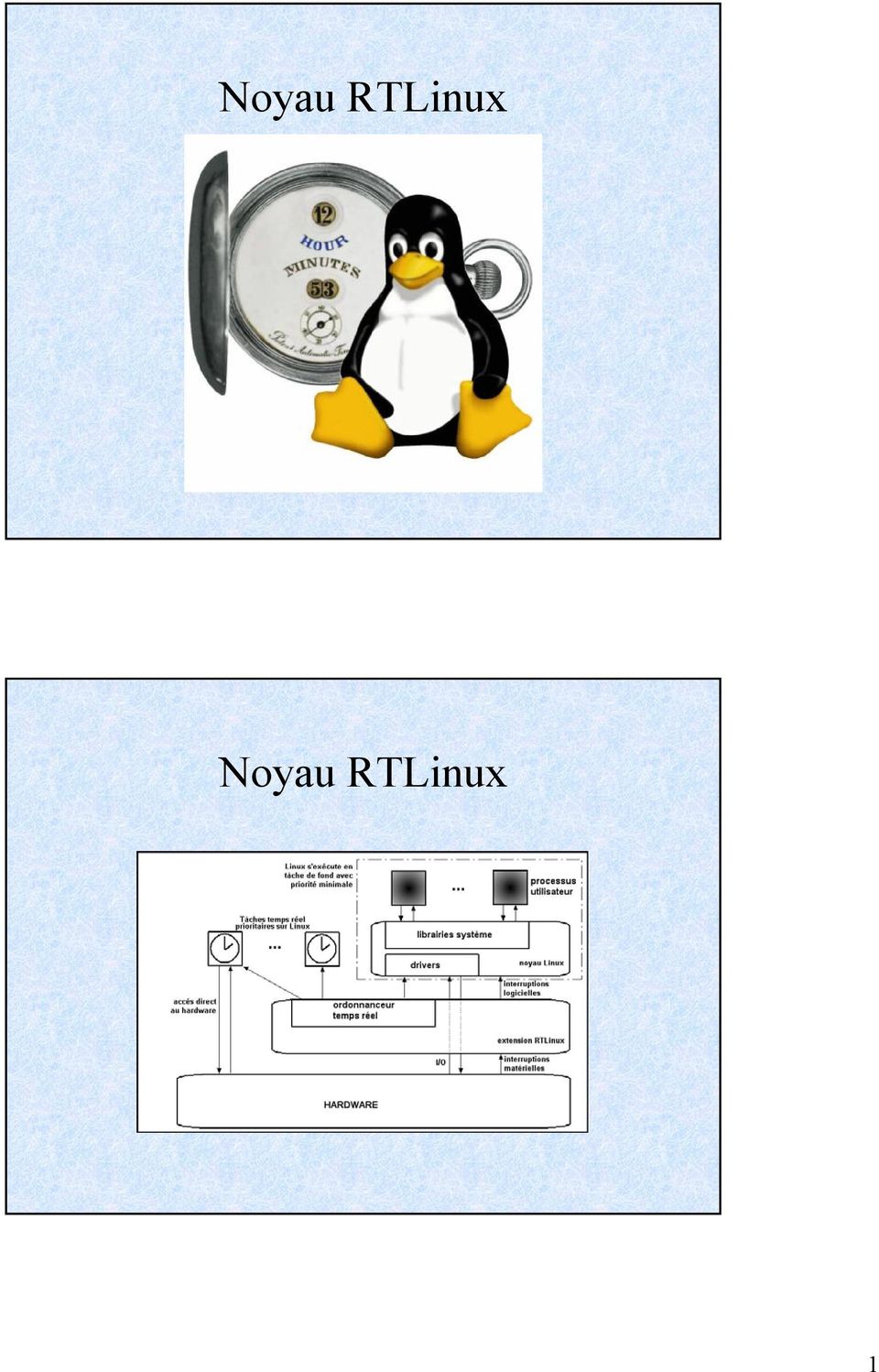
2 Principes de programmation RTLinux est implémenté sur la base du Minimal Real-time System Profile (POSIX draft 9) ou «système d'exploitation temps réel minimal», et sa structure de fonctionnement interne respecte les spécifications POSIX. Par conséquent, les fonctions POSIX de base sont utilisables, mais la plupart sont réécrites pour RTLinux. l'api n'est pas celle de POSIX, mais bien une API particulière RTLinux. Fonctions init et cleanup int init_module( ) { } void cleanup_module( ) { } 2

3 Les threads #include <pthread.h> int pthread_create(pthread_t *thread, pthread_attr_t *attr, void *(*start_routine)(void*), void *arg) ; Gestion de la priorité #include <rtl_sched.h> int pthread_setschedparam(pthread_t *thread, int policy, const struct sched_param *param) ; 3

4 Périodicité #include <rtl_sched.h> pthread_make_periodic_np(pthread_t *thread, hrtime_t start_time, hrtime_t period) ; Destruction pthread_cancel(pthread_t thread) ; pthread_join() ; 4
 ; Destruction")
5 Gestion du temps RTLinux fourni plusieurs horloges qui peuvent être utilisées pour des opérations à limitation temporelle (timer), ou pour obtenir des temps de réponse #include <rtl_time.h> int clock_gettime(clockid_t clock_id, struct timespec *ts) ; hrtime_t clock_gethrtime(clockid_t clock) ; struct timespec { time_t tv_sec ; //temps en secondes. long tv_nsec ; //temps en nanosecondes. }; Mécanismes de synchronisation Le premier est bien sûr l'exclusion mutuelle (mutex) puis les sémaphores qui sont implémentés suivant la norme POSIX: pthread_mutex_init( ), pthread_mutex_lock( ), pthread_mutex_unlock( )... sem_init( ), sem_destroy( ), sem_wait( )... Sur RTLinux, il existe aussi les barrières pour synchroniser des threads. Cet outil permet de réaliser simplement des opérations de rendez-vous. Leur utilisation est proche de celle des sémaphores : 5
 puis les sémaphores qui sont implémentés suivant la norme POSIX: pthread_mutex_init( ), pthread_mutex_lock( ),")
6 Mécanismes de synchronisation Initialisation : pthread_barrierattr_init(*pthread_barrierattr_t barrier_attr) ; Création : pthread_barrier_init (*pthread_barrier_t barrier, *pthread_barrierattr_t barrier_attr, int nbthread); Le troisième argument indique le nombre de thread et/ou processus qui vont butter sur cette barrière. Attente jusqu'à ce que tous les thread concernés aient atteint leur barrière: pthread_barrier_wait (*pthread_barrier_t barrier); Destruction : pthread_barrier_destroy(*pthread_barrier_t barrier); Communications avec l espace utilisateur Le moyen le plus simple pour envoyer des informations à l utilisateur est l impression dans le kernel ring buffer, à l aide de la fonction suivante : void rtl_printf(string) ; 6
; Communications avec l espace utilisateur Le moyen le plus simple pour envoyer des informations à l utilisateur est l impression")
7 Communications avec l espace utilisateur Rappelons que les modules RTLinux ne peuvent pas utiliser l'allocation de mémoire dynamique (fonctions malloc et free) et ne peuvent donc faire du stockage de masse sur le disque dur. Il faut donc envoyer les données à enregistrer à la partie non temps réel du système. Pour cela il existe plusieurs méthodes : Le principal moyen de transmettre des données depuis les tâches temps réel vers les processus utilisateurs est basé sur des fifos, vus et utilisés avec les fonctions classiques de gestion des fichiers (open, close, read...) du côté utilisateur, et avec des fonctions fournies dans une bibliothèque spécifique du coté RTLinux. Ces fonctions (rtf_create, rtf_destroy, rtf_put...) sont spécifiques à RTLinux. Création d'un fifo int rtf_create(unsigned int fifo, int size) ; 7
 du côté utilisateur, et avec des fonctions fournies dans une bibliothèque spécifique du coté RTLinux.")
8 Lecture fifo int rtf_get(unsigned int fifo, char * buf, int count) ; Ecriture fifo int rtf_put(unsigned int fifo, char * buf, int count) ; 8

9 Destruction fifo rtf_destroy(unsigned int fifo) ; Routine sur I/O rtf_create_handler(unsigned int fifo, int (* handler)()); 9

10 Interruptions #include <rtl_sync.h> rtl_no_interrupts(rtl_irqstate_t state) ; Sauvegarde les indicateurs d'interruption puis désactive ces dernières. Dans tout système temps réel, les interruptions ont une grande importance. Les fonctions de gestion sont spécifiques à RTLinux : #include <rtl_sync.h> rtl_no_interrupts(rtl_irqstate_t state) ; Sauvegarde les indicateurs d'interruption puis désactive ces dernières. rtl_restore_interrupts(rtl_irqstate_t state) ; Rétabli les interruptions avec les indicateurs sauvés précédement. rtl_stop_interrupts() ; Désactive les interruptions. rtl_allow_interrupts() ; Active les interruptions. #include <rtl_core.h> int rtl_request_irq (unsigned int irq, unsigned int (*handler)(unsigned int irq, struct pt_regs *regs)); Définit une routine de traitement des interruptions : irq est l'id de l'interruption et *handler est l'adresse de la routine qui sera exécutée à chaque interruption. Il ne faut jamais appeler la fonction rtl_allow_interrupt pour réactiver les interruptions en fin de routine, mais rtl_hard_enable_irq (voir plus bas). Interruptions int rtl_free_irq(unsigned int irq) ; Libère l'affectation de la routine à l'interruption irq. Pour activer et désactiver une interruption irq précise : int rtl_hard_enable_irq(unsigned int irq) ; int rtl_hard_disable_irq(unsigned int irq) ; 10
 ; Rétabli les interruptions avec les indicateurs sauvés précédement. rtl_stop_interrupts() ; Désactive les interruptions.")
11 Exemple Interruptions sur le port parallèle d un PC : demande it Status hardware Le module a pour but de répondre à une interruption sur la broche 10 du port parallèle en mettant à 1 les broches 2 et 3 de ce même port. De plus, il compte les interruptions qu'il reçoit et un thread périodique envoie le nombre d'interruptions dans un fifo toutes les 5 secondes. Exemple Ces deux actions permettent de connaître la latence sur les interruptions et le temps de traitement de ces dernières en observant la broche 2 du port parallèle, mais aussi de pouvoir comparer le nombre d'impulsions envoyées au nombre d'interruptions effectivement réalisées par le système. 11

12 Init module int init_module(void) { int status; rtl_irqstate_t f; /* défini une structure qui stocke les états de l'irq */ /******** initialisation des interuptions: *************************** } rtl_no_interrupts(f); /*sauve les flags de l'état actuel et désactive les interuptions.*/ status=rtl_request_irq(7, intr_handler); /* vérifie que la routine d'interruption est prête...*/ if(status<0) { rtl_printf("echec de la mise ne place de l'interuption: %d\n",status); return -1; } outb_p(inb_p(0x37a) 0x10, 0x37A); /* active la broche 10 du port parallele */ rtl_hard_enable_irq(7); /* enable IRQ 7 */ rtl_restore_interrupts(f);/* réactive les interruptions avec les flags sauvegardé avec rtl_no_interupts */ return -1; } ISR /*********** Fonction activee lors de chaque IT: **********************/ unsigned int intr_handler(unsigned int irq, struct pt_regs *regs) { /* les deux fonctions outb genere un creneau sur les broches 2 et 3 du port parallele. Doit etre desactive pour des IT de frequence superieure a 75KHz */ outb(3, 0x378); outb(0, 0x378); rtl_hard_enable_irq(7); /* reactive l'it */ return 0; } 12
; /* enable IRQ 7 */ rtl_restore_interrupts(f);/* réactive les interruptions avec les flags sauvegardé avec rtl_no_interupts */ return -1; } ISR /*********** Fonction activee")
13 Clean up void cleanup_module(void) { rtl_free_irq(7); /* desactivation des IT. */ } Sortie temps de réponse : 8 μs temps de traitement : 4 μs 13

Exécutif temps réel Pierre-Yves Duval (cppm)
") Exécutif temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 Plan Exécutif Tâches Evénements et synchronisation Partage de ressources Communications
Exécutif temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 Plan Exécutif Tâches Evénements et synchronisation Partage de ressources Communications
03/04/2007. Tâche 1 Tâche 2 Tâche 3. Système Unix. Time sharing
 3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
1 Mesure de la performance d un système temps réel : la gigue
 TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
Introduction à la programmation concurrente
 Introduction à la programmation concurrente Moniteurs Yann Thoma Reconfigurable and Embedded Digital Systems Institute Haute Ecole d Ingénierie et de Gestion du Canton de Vaud This work is licensed under
Introduction à la programmation concurrente Moniteurs Yann Thoma Reconfigurable and Embedded Digital Systems Institute Haute Ecole d Ingénierie et de Gestion du Canton de Vaud This work is licensed under
Temps Réel. Jérôme Pouiller <j.pouiller@sysmic.org> Septembre 2011
 Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Le traitement du temps
 Programmation Système Mesure Horloges Sommeil Mise en forme Fabrice Harrouet École Nationale d Ingénieurs de Brest harrouet@enib.fr http://www.enib.fr/~harrouet/ enib, F.H... 1/30 Intérêt Cadencer les
Programmation Système Mesure Horloges Sommeil Mise en forme Fabrice Harrouet École Nationale d Ingénieurs de Brest harrouet@enib.fr http://www.enib.fr/~harrouet/ enib, F.H... 1/30 Intérêt Cadencer les
Mesure de performances. [Architecture des ordinateurs, Hennessy & Patterson, 1996]
![Mesure de performances. [Architecture des ordinateurs, Hennessy & Patterson, 1996]](/thumbs/23/1769821.jpg "Mesure de performances. [Architecture des ordinateurs, Hennessy & Patterson, 1996]") Mesure de performances [Architecture des ordinateurs, Hennessy & Patterson, 1996] Croissance des performances des microprocesseurs Avant le milieu des années 80, le gain dépendait de la technologie. Après,
Mesure de performances [Architecture des ordinateurs, Hennessy & Patterson, 1996] Croissance des performances des microprocesseurs Avant le milieu des années 80, le gain dépendait de la technologie. Après,
Ordinateurs, Structure et Applications
 Ordinateurs, Structure et Applications Cours 10, Les interruptions Etienne Tremblay Université Laval, Hiver 2012 Cours 10, p.1 Les interruptions du 8086 Une interruption interrompt l exécution séquentielle
Ordinateurs, Structure et Applications Cours 10, Les interruptions Etienne Tremblay Université Laval, Hiver 2012 Cours 10, p.1 Les interruptions du 8086 Une interruption interrompt l exécution séquentielle
Cahier des charges. driver WIFI pour chipset Ralink RT2571W. sur hardware ARM7
 Cahier des charges driver WIFI pour chipset Ralink RT2571W sur hardware ARM7 RevA 13/03/2006 Création du document Sylvain Huet RevB 16/03/2006 Fusion des fonctions ARP et IP. SH Modification des milestones
Cahier des charges driver WIFI pour chipset Ralink RT2571W sur hardware ARM7 RevA 13/03/2006 Création du document Sylvain Huet RevB 16/03/2006 Fusion des fonctions ARP et IP. SH Modification des milestones
REALISATION d'un. ORDONNANCEUR à ECHEANCES
 REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
Les processus légers : threads. Système L3, 2014-2015 1/31
 Les processus légers : threads Système L3, 2014-2015 1/31 Les threads Les threads sont des processus légers exécutés à l intérieur d un processus L exécution des threads est concurrente Il existe toujours
Les processus légers : threads Système L3, 2014-2015 1/31 Les threads Les threads sont des processus légers exécutés à l intérieur d un processus L exécution des threads est concurrente Il existe toujours
INTRODUCTION À LA PROGRAMMATION CONCURRENTE
 INTRODUCTION À LA PROGRAMMATION CONCURRENTE POLYCOPIÉ DU COURS PCO1 Prof. Claude Evéquoz Prof. Yann Thoma HEIG-VD 2009 Table des matières Table des matières 2 1 Introduction à la programmation concurrente
INTRODUCTION À LA PROGRAMMATION CONCURRENTE POLYCOPIÉ DU COURS PCO1 Prof. Claude Evéquoz Prof. Yann Thoma HEIG-VD 2009 Table des matières Table des matières 2 1 Introduction à la programmation concurrente
Introduction aux Systèmes et aux Réseaux
 Introduction aux Systèmes et aux Réseaux Cours 5 Processus D après un cours de Julien Forget (univ Lille1) Laure Gonnord http://laure.gonnord.org/pro/teaching/ Laure.Gonnord@univ-lyon1.fr Master CCI -
Introduction aux Systèmes et aux Réseaux Cours 5 Processus D après un cours de Julien Forget (univ Lille1) Laure Gonnord http://laure.gonnord.org/pro/teaching/ Laure.Gonnord@univ-lyon1.fr Master CCI -
Programmation système de commandes en C
 Programmation système de commandes en C Cours de Programmation système Tuyêt Trâm DANG NGOC Université de Cergy-Pontoise 2012 2013 Tuyêt Trâm DANG NGOC Programmation système de commandes
Programmation système de commandes en C Cours de Programmation système Tuyêt Trâm DANG NGOC Université de Cergy-Pontoise 2012 2013 Tuyêt Trâm DANG NGOC Programmation système de commandes
Introduction aux systèmes temps réel. Iulian Ober IRIT ober@iut-blagnac.fr
 Introduction aux systèmes temps réel Iulian Ober IRIT ober@iut-blagnac.fr Sommaire Généralités Caractéristiques récurrentes des STR Types de problèmes soulevées Programmation des STR Prog. concurrente
Introduction aux systèmes temps réel Iulian Ober IRIT ober@iut-blagnac.fr Sommaire Généralités Caractéristiques récurrentes des STR Types de problèmes soulevées Programmation des STR Prog. concurrente
4. Outils pour la synchronisation F. Boyer, Laboratoire Lig Fabienne.Boyer@imag.fr
 4. Outils pour la synchronisation F. Boyer, Laboratoire Lig Fabienne.Boyer@imag.fr Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
4. Outils pour la synchronisation F. Boyer, Laboratoire Lig Fabienne.Boyer@imag.fr Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
TP Temps Réel. Polytech Paris - Mars 2012
 TP Temps Réel Jérôme Pouiller Polytech Paris - Mars 2012 Table des matières 1 Avant de commencer 2 1.1 Documentation.................................................... 3 1.1.1
TP Temps Réel Jérôme Pouiller Polytech Paris - Mars 2012 Table des matières 1 Avant de commencer 2 1.1 Documentation.................................................... 3 1.1.1
Chapitre 4 : Outils de communication centralisés entre processus
 Chapitre 1 : Introduction Chapitre 2 : Processus Chapitre 3 : Ordonnancement Chapitre 4 : Outils de communication centralisés entre processus Chapitre 5 : Allocation mémoire Chapitre 6 : Mémoire virtuelle
Chapitre 1 : Introduction Chapitre 2 : Processus Chapitre 3 : Ordonnancement Chapitre 4 : Outils de communication centralisés entre processus Chapitre 5 : Allocation mémoire Chapitre 6 : Mémoire virtuelle
ENSP Strasbourg (Edition 2009-2010) Les Systèmes Temps Réels - Ch. DOIGNON. Chapitre 3. Mise en œuvre : signaux, gestion du temps et multi-activités
 Les Systèmes Temps Réels - Ch. DOIGNON. Chapitre 3. Mise en œuvre : signaux, gestion du temps et multi-activités") Chapitre 3 Mise en œuvre : signaux, gestion du temps et multi-activités 77 GENERALITES SUR LES SIGNAUX Un signal est une information de contrôle (requête) transmise à un processus par un autre processus
Chapitre 3 Mise en œuvre : signaux, gestion du temps et multi-activités 77 GENERALITES SUR LES SIGNAUX Un signal est une information de contrôle (requête) transmise à un processus par un autre processus
Introduction à la Programmation Parallèle: MPI
 Introduction à la Programmation Parallèle: MPI Frédéric Gava et Gaétan Hains L.A.C.L Laboratoire d Algorithmique, Complexité et Logique Cours du M2 SSI option PSSR Plan 1 Modèle de programmation 2 3 4
Introduction à la Programmation Parallèle: MPI Frédéric Gava et Gaétan Hains L.A.C.L Laboratoire d Algorithmique, Complexité et Logique Cours du M2 SSI option PSSR Plan 1 Modèle de programmation 2 3 4
IFT2245 - Systèmes d exploitation - TP n 1-20%
 IFT2245 - Systèmes d exploitation - TP n 1-20% DIRO - Université de Montréal Nicolas Rous et Dorian Gomez Disponible : 14/02/2013 - Remise : 28/03/2013 au début de la démo LISEZ TOUT LE DOCUMENT AVANT
IFT2245 - Systèmes d exploitation - TP n 1-20% DIRO - Université de Montréal Nicolas Rous et Dorian Gomez Disponible : 14/02/2013 - Remise : 28/03/2013 au début de la démo LISEZ TOUT LE DOCUMENT AVANT
1. Structure d un programme C. 2. Commentaire: /*..texte */ On utilise aussi le commentaire du C++ qui est valable pour C: 3.
 1. Structure d un programme C Un programme est un ensemble de fonctions. La fonction "main" constitue le point d entrée pour l exécution. Un exemple simple : #include int main() { printf ( this
1. Structure d un programme C Un programme est un ensemble de fonctions. La fonction "main" constitue le point d entrée pour l exécution. Un exemple simple : #include int main() { printf ( this
Modélisation des interfaces matériel/logiciel
 Modélisation des interfaces matériel/logiciel Présenté par Frédéric Pétrot Patrice Gerin Alexandre Chureau Hao Shen Aimen Bouchhima Ahmed Jerraya 1/28 TIMA Laboratory SLS Group 46 Avenue Félix VIALLET
Modélisation des interfaces matériel/logiciel Présenté par Frédéric Pétrot Patrice Gerin Alexandre Chureau Hao Shen Aimen Bouchhima Ahmed Jerraya 1/28 TIMA Laboratory SLS Group 46 Avenue Félix VIALLET
Runtime. Gestion de la réactivité des communications réseau. François Trahay Runtime, LaBRI sous la direction d'alexandre Denis Université Bordeaux I
 Runtime Gestion de la réactivité des communications réseau François Trahay Runtime, LaBRI sous la direction d'alexandre Denis Université Bordeaux I 1 Le calcul hautes performances La tendance actuelle
Runtime Gestion de la réactivité des communications réseau François Trahay Runtime, LaBRI sous la direction d'alexandre Denis Université Bordeaux I 1 Le calcul hautes performances La tendance actuelle
La programmation des PIC en C. Les fonctions, les interruptions.
 La programmation des PIC en C Les fonctions, les interruptions. Réalisation : HOLLARD Hervé. http://electronique-facile.com Date : 26 août 2004 Révision : 1.2 Sommaire Sommaire... 2 Introduction... 3 Structure
La programmation des PIC en C Les fonctions, les interruptions. Réalisation : HOLLARD Hervé. http://electronique-facile.com Date : 26 août 2004 Révision : 1.2 Sommaire Sommaire... 2 Introduction... 3 Structure
Info0604 Programmation multi-threadée. Cours 5. Programmation multi-threadée en Java
 Info0604 Programmation multi-threadée Cours 5 Programmation multi-threadée en Java Pierre Delisle Université de Reims Champagne-Ardenne Département de Mathématiques et Informatique 18 février 2015 Plan
Info0604 Programmation multi-threadée Cours 5 Programmation multi-threadée en Java Pierre Delisle Université de Reims Champagne-Ardenne Département de Mathématiques et Informatique 18 février 2015 Plan
Synchro et Threads Java TM
 Synchro et Threads Java TM NICOD JEAN-MARC Master 2 Informatique Université de Franche-Comté UFR des Sciences et Techniques septembre 2008 NICOD JEAN-MARC Synchro et Threads avec Java TM 1 / 32 Sommaire
Synchro et Threads Java TM NICOD JEAN-MARC Master 2 Informatique Université de Franche-Comté UFR des Sciences et Techniques septembre 2008 NICOD JEAN-MARC Synchro et Threads avec Java TM 1 / 32 Sommaire
Processus! programme. DIMA, Systèmes Centralisés (Ph. Mauran) " Processus = suite d'actions = suite d'états obtenus = trace
 Processus = suite d'actions = suite d'états obtenus = trace") Processus 1) Contexte 2) Modèles de Notion de Points de vue Modèle fourni par le SX Opérations sur les 3) Gestion des Représentation des Opérations 4) Ordonnancement des Niveaux d ordonnancement Ordonnancement
Processus 1) Contexte 2) Modèles de Notion de Points de vue Modèle fourni par le SX Opérations sur les 3) Gestion des Représentation des Opérations 4) Ordonnancement des Niveaux d ordonnancement Ordonnancement
Brefs rappels sur la pile et le tas (Stack. / Heap) et les pointeurs
 et les pointeurs") Brefs rappels sur la pile et le tas (Stack / Heap) et les pointeurs (exemples en C) v1.11 - Olivier Carles 1 Pile et Tas Mémoire allouée de manière statique Mémoire Allouée Dynamiquement variables locales
Brefs rappels sur la pile et le tas (Stack / Heap) et les pointeurs (exemples en C) v1.11 - Olivier Carles 1 Pile et Tas Mémoire allouée de manière statique Mémoire Allouée Dynamiquement variables locales
Implémentation Matérielle des Services d un RTOS sur Circuit Reconfigurable
 Implémentation Matérielle des Services d un RTOS sur Circuit Reconfigurable Pierre Olivier*, Jalil Boukhobza*, Jean-Philippe Babau +, Damien Picard +, Stéphane Rubini + *Lab-STICC, + LISyC, Université
Implémentation Matérielle des Services d un RTOS sur Circuit Reconfigurable Pierre Olivier*, Jalil Boukhobza*, Jean-Philippe Babau +, Damien Picard +, Stéphane Rubini + *Lab-STICC, + LISyC, Université
Cours 6 : Tubes anonymes et nommés
 Cours 6 : Tubes anonymes et nommés Mécanisme de communications du système de fichiers I-node associé. Type de fichier: S_IFIFO. Accès au travers des primitives read et write. Les tubes sont unidirectionnels
Cours 6 : Tubes anonymes et nommés Mécanisme de communications du système de fichiers I-node associé. Type de fichier: S_IFIFO. Accès au travers des primitives read et write. Les tubes sont unidirectionnels
Centre CPGE TSI - Safi 2010/2011. Algorithmique et programmation :
 Algorithmique et programmation : STRUCTURES DE DONNÉES A. Structure et enregistrement 1) Définition et rôle des structures de données en programmation 1.1) Définition : En informatique, une structure de
Algorithmique et programmation : STRUCTURES DE DONNÉES A. Structure et enregistrement 1) Définition et rôle des structures de données en programmation 1.1) Définition : En informatique, une structure de
Programmation système en C/C++
 Programmation système en C/C++ Jean-Baptiste Vioix (jb.vioix@free.fr) LE2I - ENESAD http://jb.vioix.free.fr 1-41 Programmation en C/C++ sous Unix Il existe des très nombreux outils de développement sous
Programmation système en C/C++ Jean-Baptiste Vioix (jb.vioix@free.fr) LE2I - ENESAD http://jb.vioix.free.fr 1-41 Programmation en C/C++ sous Unix Il existe des très nombreux outils de développement sous
Pilotes matériels sous Linux : mode noyau versus mode utilisateur
 1/31 Pilotes matériels sous Linux : mode noyau versus mode utilisateur Stelian Pop Système d exploitation 2/31 Interface entre : ressources matérielles (écran, clavier, carte
1/31 Pilotes matériels sous Linux : mode noyau versus mode utilisateur Stelian Pop Système d exploitation 2/31 Interface entre : ressources matérielles (écran, clavier, carte
OS Réseaux et Programmation Système - C5
 OS Réseaux et Programmation Système - C5 Rabie Ben Atitallah rabie.benatitallah@univ-valenciennes.fr RPC - XDR Rappel RPC: Remote Procedure Call Besoin d un environnement de haut niveau pour le développement
OS Réseaux et Programmation Système - C5 Rabie Ben Atitallah rabie.benatitallah@univ-valenciennes.fr RPC - XDR Rappel RPC: Remote Procedure Call Besoin d un environnement de haut niveau pour le développement
Systèmes temps-réel. Plan général. Matthieu Herrb. http://homepages.laas.fr/matthieu/temps-reel.pdf. Mars 2015. 1 Introduction - concepts généraux
 Systèmes temps-réel Matthieu Herrb http://homepages.laas.fr/matthieu/temps-reel.pdf Mars 2015 Plan général 1 Introduction - concepts généraux 2 Processus 3 Synchronisation 4 Gestion de la mémoire 5 Conclusion
Systèmes temps-réel Matthieu Herrb http://homepages.laas.fr/matthieu/temps-reel.pdf Mars 2015 Plan général 1 Introduction - concepts généraux 2 Processus 3 Synchronisation 4 Gestion de la mémoire 5 Conclusion
INTRODUCTION AUX SYSTEMES D EXPLOITATION. TD2 Exclusion mutuelle / Sémaphores
 INTRODUCTION AUX SYSTEMES D EXPLOITATION TD2 Exclusion mutuelle / Sémaphores Exclusion mutuelle / Sémaphores - 0.1 - S O M M A I R E 1. GENERALITES SUR LES SEMAPHORES... 1 1.1. PRESENTATION... 1 1.2. UN
INTRODUCTION AUX SYSTEMES D EXPLOITATION TD2 Exclusion mutuelle / Sémaphores Exclusion mutuelle / Sémaphores - 0.1 - S O M M A I R E 1. GENERALITES SUR LES SEMAPHORES... 1 1.1. PRESENTATION... 1 1.2. UN
Realtime applications with RTAI. R.KOCIK Embedded Systems department
 Realtime applications with RTAI R.KOCIK Embedded Systems department 1 Outline I. Which RTOS to choose? II. Why not to choose Linux? III. Realtime Linux IV. Using RTAI V. RT TASK scheduling with RTAI VI.
Realtime applications with RTAI R.KOCIK Embedded Systems department 1 Outline I. Which RTOS to choose? II. Why not to choose Linux? III. Realtime Linux IV. Using RTAI V. RT TASK scheduling with RTAI VI.
Linux embarqué Retour d expérience et temps réel. Denis Coupvent-Desgraviers
 Linux embarqué Retour d expérience et temps réel 1 Denis Coupvent-Desgraviers Introduction Bien connaître les bases d un système d exploitation Utilisation de GNU/Linux Bonnes connaissances en langage
Linux embarqué Retour d expérience et temps réel 1 Denis Coupvent-Desgraviers Introduction Bien connaître les bases d un système d exploitation Utilisation de GNU/Linux Bonnes connaissances en langage
Les vulnérabilités du noyau. LECORNET Olivier LEGROS Bruno VIGIER Nicolas Promo 2005
 Les vulnérabilités du noyau LECORNET Olivier LEGROS Bruno VIGIER Nicolas Promo 2005 27 Septembre 2003 Table des matières 1 Introduction 3 2 Fonctionnement du noyau 4 2.1 Les modes de fonctionnements............................
Les vulnérabilités du noyau LECORNET Olivier LEGROS Bruno VIGIER Nicolas Promo 2005 27 Septembre 2003 Table des matières 1 Introduction 3 2 Fonctionnement du noyau 4 2.1 Les modes de fonctionnements............................
Problèmes liés à la concurrence
 ENS Cachan Problématique Difficile de gérer la concurrence : Pas toujours facile d avoir des fonctions réentrantes. Risque de race condition : ex : x :=x+1 x :=x+1 On voudrait des blocs d instructions
ENS Cachan Problématique Difficile de gérer la concurrence : Pas toujours facile d avoir des fonctions réentrantes. Risque de race condition : ex : x :=x+1 x :=x+1 On voudrait des blocs d instructions
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE
 EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
Arguments d un programme
 Arguments d un programme L2 SPI, Bruno Jacob 1 Arguments Quand on appelle un programme dans un environnement UNIX ou MS- DOS, on compose une ligne de commandes de la forme : nom-du-programme argument1
Arguments d un programme L2 SPI, Bruno Jacob 1 Arguments Quand on appelle un programme dans un environnement UNIX ou MS- DOS, on compose une ligne de commandes de la forme : nom-du-programme argument1
Détection de pollution maritime avec GNU/Linux. Eric Bénard - eric@eukrea.com - 08 juillet 2010
 Détection de pollution maritime avec GNU/Linux Eric Bénard - eric@eukrea.com - 08 juillet 2010 Conception de produits électroniques intégrant des logiciels libres : u-boot, barebox, linux Développement
Détection de pollution maritime avec GNU/Linux Eric Bénard - eric@eukrea.com - 08 juillet 2010 Conception de produits électroniques intégrant des logiciels libres : u-boot, barebox, linux Développement
Réalisation d un réseau de capteurs de température sans fil basé sur le protocole ZigBee
 Cedric BEAUSSE Mohamed BOUGUERRA Hong Yu GUAN El Ayachi MOKTAD Projet avancé en systèmes embarqués 2006 / 2007 Réalisation d un réseau de capteurs de température sans fil basé sur le protocole ZigBee Sommaire
Cedric BEAUSSE Mohamed BOUGUERRA Hong Yu GUAN El Ayachi MOKTAD Projet avancé en systèmes embarqués 2006 / 2007 Réalisation d un réseau de capteurs de température sans fil basé sur le protocole ZigBee Sommaire
IRL : Simulation distribuée pour les systèmes embarqués
 IRL : Simulation distribuée pour les systèmes embarqués Yassine El Khadiri, 2 ème année Ensimag, Grenoble INP Matthieu Moy, Verimag Denis Becker, Verimag 19 mai 2015 1 Table des matières 1 MPI et la sérialisation
IRL : Simulation distribuée pour les systèmes embarqués Yassine El Khadiri, 2 ème année Ensimag, Grenoble INP Matthieu Moy, Verimag Denis Becker, Verimag 19 mai 2015 1 Table des matières 1 MPI et la sérialisation
Sixième partie. Programmation multi-activités Java & Posix Threads. Généralités Java Threads POSIX Threads Autres approches
 Sixième partie Programmation multi-activités Java & Posix Threads Systèmes concurrents 2 / 55 Plan 1 2 Synchronisation (java d'origine) Synchronisation (java moderne) 3 Synchronisation 4 Microsoft Windows
Sixième partie Programmation multi-activités Java & Posix Threads Systèmes concurrents 2 / 55 Plan 1 2 Synchronisation (java d'origine) Synchronisation (java moderne) 3 Synchronisation 4 Microsoft Windows
Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre. Partie I : Introduction
 Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre Partie I : Introduction Plan de la première partie Quelques définitions Caractéristiques communes des applications temps-réel Exemples d
Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre Partie I : Introduction Plan de la première partie Quelques définitions Caractéristiques communes des applications temps-réel Exemples d
Une méthode de conception de systèmes sur puce
 École thématique ARCHI 05 Une méthode de conception de systèmes sur puce (de l intégration d applications) Frédéric PÉTROT Laboratoire TIMA Institut National Polytechnique de Grenoble Frédéric Pétrot/TIMA/INPG
École thématique ARCHI 05 Une méthode de conception de systèmes sur puce (de l intégration d applications) Frédéric PÉTROT Laboratoire TIMA Institut National Polytechnique de Grenoble Frédéric Pétrot/TIMA/INPG
Performances de la programmation multi-thread
 UFR Sciences et techniques de Franche-Comté Projet semestriel 2ème année de Master Informatique Performances de la programmation multi-thread Auteur(s) : Beuque Eric Moutenet Cyril Tuteur(s) : Philippe
UFR Sciences et techniques de Franche-Comté Projet semestriel 2ème année de Master Informatique Performances de la programmation multi-thread Auteur(s) : Beuque Eric Moutenet Cyril Tuteur(s) : Philippe
Linux embarqué, Linux Temps Réel : présentation
 ENSEIRB - 4JLG Linux embarqué, Linux Temps Réel : présentation Patrice KADIONIK email http : kadionik@enseirb.fr : http://www.enseirb.fr/~kadionik pk/2003 v 2.1 Reproduction et exploitation à des fins
ENSEIRB - 4JLG Linux embarqué, Linux Temps Réel : présentation Patrice KADIONIK email http : kadionik@enseirb.fr : http://www.enseirb.fr/~kadionik pk/2003 v 2.1 Reproduction et exploitation à des fins
Introduction à la programmation orientée objet, illustrée par le langage C++ Patrick Cégielski cegielski@u-pec.fr
 Introduction à la programmation orientée objet, illustrée par le langage C++ Patrick Cégielski cegielski@u-pec.fr Mars 2002 Pour Irène et Marie Legal Notice Copyright c 2002 Patrick Cégielski Université
Introduction à la programmation orientée objet, illustrée par le langage C++ Patrick Cégielski cegielski@u-pec.fr Mars 2002 Pour Irène et Marie Legal Notice Copyright c 2002 Patrick Cégielski Université
Programmation Système (en C sous linux) Rémy Malgouyres LIMOS UMR 6158, IUT département info Université Clermont 1, B.P.
 Rémy Malgouyres LIMOS UMR 6158, IUT département info Université Clermont 1, B.P.") Programmation Système (en C sous linux) Rémy Malgouyres LIMOS UMR 6158, IUT département info Université Clermont 1, B.P. 86 63172 AUBI Une version PDF de ce document est téléchargeable sur mon site web,
Programmation Système (en C sous linux) Rémy Malgouyres LIMOS UMR 6158, IUT département info Université Clermont 1, B.P. 86 63172 AUBI Une version PDF de ce document est téléchargeable sur mon site web,
École Polytechnique de Montréal. Département de Génie Informatique et Génie Logiciel. Cours INF2610. Contrôle périodique.
 École Polytechnique de Montréal Département de Génie Informatique et Génie Logiciel Cours INF2610 Contrôle périodique Automne 2013 Date : 11 octobre 2013 de 18h à 20h Professeur : Boucheneb Hanifa Documentation
École Polytechnique de Montréal Département de Génie Informatique et Génie Logiciel Cours INF2610 Contrôle périodique Automne 2013 Date : 11 octobre 2013 de 18h à 20h Professeur : Boucheneb Hanifa Documentation
Travaux pratiques. Compression en codage de Huffman. 1.3. Organisation d un projet de programmation
 Université de Savoie Module ETRS711 Travaux pratiques Compression en codage de Huffman 1. Organisation du projet 1.1. Objectifs Le but de ce projet est d'écrire un programme permettant de compresser des
Université de Savoie Module ETRS711 Travaux pratiques Compression en codage de Huffman 1. Organisation du projet 1.1. Objectifs Le but de ce projet est d'écrire un programme permettant de compresser des
INITIATION AU LANGAGE C SUR PIC DE MICROSHIP
 COURS PROGRAMMATION INITIATION AU LANGAGE C SUR MICROCONTROLEUR PIC page 1 / 7 INITIATION AU LANGAGE C SUR PIC DE MICROSHIP I. Historique du langage C 1972 : naissance du C dans les laboratoires BELL par
COURS PROGRAMMATION INITIATION AU LANGAGE C SUR MICROCONTROLEUR PIC page 1 / 7 INITIATION AU LANGAGE C SUR PIC DE MICROSHIP I. Historique du langage C 1972 : naissance du C dans les laboratoires BELL par
Guide d'installation et de configuration de Pervasive.SQL 7 dans un environnement réseau Microsoft Windows NT
 Guide d'installation et de configuration de Pervasive.SQL 7 dans un environnement réseau Microsoft Windows NT Ce guide explique les différentes étapes de l installation et de la configuration des composantes
Guide d'installation et de configuration de Pervasive.SQL 7 dans un environnement réseau Microsoft Windows NT Ce guide explique les différentes étapes de l installation et de la configuration des composantes
On appelle variable condition une var qui peut être testée et
 Un concept plus général: g Variables condition On appelle variable condition une var qui peut être testée et endort le thread qui la teste si la condition est fausse le réveille quand la condition devient
Un concept plus général: g Variables condition On appelle variable condition une var qui peut être testée et endort le thread qui la teste si la condition est fausse le réveille quand la condition devient
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Playing with ptrace() for fun and profit
 for fun and profit") sous GNU/Linux nicolas.bareil@eads.net EADS Corporate Research Center - DCR/STI/C SSI Lab SSTIC 2006 Il était une fois... Sous UNIX, ptrace() est le seul moyen de debuggage. User-space, Interface rigide
sous GNU/Linux nicolas.bareil@eads.net EADS Corporate Research Center - DCR/STI/C SSI Lab SSTIC 2006 Il était une fois... Sous UNIX, ptrace() est le seul moyen de debuggage. User-space, Interface rigide
Exercices INF5171 : série #3 (Automne 2012)
") Exercices INF5171 : série #3 (Automne 2012) 1. Un moniteur pour gérer des ressources Le moniteur MPD 1 présente une première version d'un moniteur, exprimé en pseudo-mpd, pour gérer des ressources le nombre
Exercices INF5171 : série #3 (Automne 2012) 1. Un moniteur pour gérer des ressources Le moniteur MPD 1 présente une première version d'un moniteur, exprimé en pseudo-mpd, pour gérer des ressources le nombre
GESTION DES FICHIERS C/UNIX
 Licence IG Page 1 sur 6 GESTION DES FICHIERS C/UNIX Introduction Deux modes d appel - Par la bibliothèque standard C (appel de haut niveau) - Par appels système (bas niveau) Nécessite les includes suivant
Licence IG Page 1 sur 6 GESTION DES FICHIERS C/UNIX Introduction Deux modes d appel - Par la bibliothèque standard C (appel de haut niveau) - Par appels système (bas niveau) Nécessite les includes suivant
J2SE Threads, 1ère partie Principe Cycle de vie Création Synchronisation
 J2SE Threads, 1ère partie Principe Cycle de vie Création Synchronisation Cycle Ingénierie 2e année SIGL Dernière mise à jour : 19/10/2006 Christophe Porteneuve Threads Principes Cycle de vie Création java.lang.thread
J2SE Threads, 1ère partie Principe Cycle de vie Création Synchronisation Cycle Ingénierie 2e année SIGL Dernière mise à jour : 19/10/2006 Christophe Porteneuve Threads Principes Cycle de vie Création java.lang.thread
Le Langage C Version 1.2 c 2002 Florence HENRY Observatoire de Paris Université de Versailles florence.henry@obspm.fr
 Le Langage C Version 1.2 c 2002 Florence HENRY Observatoire de Paris Université de Versailles florence.henry@obspm.fr Table des matières 1 Les bases 3 2 Variables et constantes 5 3 Quelques fonctions indispensables
Le Langage C Version 1.2 c 2002 Florence HENRY Observatoire de Paris Université de Versailles florence.henry@obspm.fr Table des matières 1 Les bases 3 2 Variables et constantes 5 3 Quelques fonctions indispensables
Plan global. Programmation système II. Socket du domaine UNIX. Plan. Socket UNIX, Terminaux, Async IO, Mémoire, ELF.
 Programmation système II Socket UNIX, Terminaux, Async IO, Mémoire, ELF Timothée Ravier LIFO, INSA-CVL, LIPN 1 re année cycle ingénieur STI 2013 2014 Plan global 1 Socket UNIX 2 Terminaux 3 Autres modèles
Programmation système II Socket UNIX, Terminaux, Async IO, Mémoire, ELF Timothée Ravier LIFO, INSA-CVL, LIPN 1 re année cycle ingénieur STI 2013 2014 Plan global 1 Socket UNIX 2 Terminaux 3 Autres modèles
Securité de l information :
 Information Security Guidlines Securité de l information : (Politique:2013.0020) Responsabilité de l utilisateur final à propos de la politique " du bureau propre et de l écran vide" Version control please
Information Security Guidlines Securité de l information : (Politique:2013.0020) Responsabilité de l utilisateur final à propos de la politique " du bureau propre et de l écran vide" Version control please
IV- Comment fonctionne un ordinateur?
 1 IV- Comment fonctionne un ordinateur? L ordinateur est une alliance du hardware (le matériel) et du software (les logiciels). Jusqu à présent, nous avons surtout vu l aspect «matériel», avec les interactions
1 IV- Comment fonctionne un ordinateur? L ordinateur est une alliance du hardware (le matériel) et du software (les logiciels). Jusqu à présent, nous avons surtout vu l aspect «matériel», avec les interactions
Manuel de l utilitaire Computer Setup (F10) HP Compaq Business Desktops Modèles d220 et d230
 HP Compaq Business Desktops Modèles d220 et d230") Manuel de l utilitaire Computer Setup (F10) HP Compaq Business Desktops Modèles d220 et d230 Référence : 331599-051 Juin 2003 Ce manuel contient le mode d emploi de l utilitaire de configuration Computer
Manuel de l utilitaire Computer Setup (F10) HP Compaq Business Desktops Modèles d220 et d230 Référence : 331599-051 Juin 2003 Ce manuel contient le mode d emploi de l utilitaire de configuration Computer
Cours de Systèmes d Exploitation
 Licence d informatique Synchronisation et Communication inter-processus Hafid Bourzoufi Université de Valenciennes - ISTV Introduction Les processus concurrents s exécutant dans le système d exploitation
Licence d informatique Synchronisation et Communication inter-processus Hafid Bourzoufi Université de Valenciennes - ISTV Introduction Les processus concurrents s exécutant dans le système d exploitation
Boîtier pour disque dur externe 3,5" (8,89cm) USB 2.0
 USB 2.0") Boîtier pour disque dur externe 3,5" (8,89cm) USB 2.0 Guide d'utilisation DA-71051 Avant-propos Nous tenons à vous féliciter d'avoir choisi l'un de nos produits! Nous allons vous montrer un nouveau concept
Boîtier pour disque dur externe 3,5" (8,89cm) USB 2.0 Guide d'utilisation DA-71051 Avant-propos Nous tenons à vous féliciter d'avoir choisi l'un de nos produits! Nous allons vous montrer un nouveau concept
Initiation. àl algorithmique et à la programmation. en C
 Initiation àl algorithmique et à la programmation en C Initiation àl algorithmique et à la programmation en C Cours avec 129 exercices corrigés Illustration de couverture : alwyncooper - istock.com Dunod,
Initiation àl algorithmique et à la programmation en C Initiation àl algorithmique et à la programmation en C Cours avec 129 exercices corrigés Illustration de couverture : alwyncooper - istock.com Dunod,
Structure d un programme
 Architecture des ordinateurs Cours 6 Structure d un programme 3 décembre 2012 Archi 1/30 Programme en Assembleur Archi 2/30 Sections de données programme en assembleur = fichier texte (extension.asm) organisé
Architecture des ordinateurs Cours 6 Structure d un programme 3 décembre 2012 Archi 1/30 Programme en Assembleur Archi 2/30 Sections de données programme en assembleur = fichier texte (extension.asm) organisé
Le langage C. Séance n 4
 Université Paris-Sud 11 Institut de Formation des Ingénieurs Remise à niveau INFORMATIQUE Année 2007-2008 Travaux pratiques d informatique Le langage C Séance n 4 But : Vous devez maîtriser à la fin de
Université Paris-Sud 11 Institut de Formation des Ingénieurs Remise à niveau INFORMATIQUE Année 2007-2008 Travaux pratiques d informatique Le langage C Séance n 4 But : Vous devez maîtriser à la fin de
Cours Programmation Système
 Cours Programmation Système Filière SMI Semestre S6 El Mostafa DAOUDI Département de Mathématiques et d Informatique, Faculté des Sciences Université Mohammed Premier Oujda m.daoudi@fso.ump.ma Février
Cours Programmation Système Filière SMI Semestre S6 El Mostafa DAOUDI Département de Mathématiques et d Informatique, Faculté des Sciences Université Mohammed Premier Oujda m.daoudi@fso.ump.ma Février
Communication par sockets
 Rappel : le réseau vu de l!utilisateur (1) Communication par sockets Sacha Krakowiak Université Joseph Fourier Projet Sardes (INRIA et IMAG-LSR) http://sardes.inrialpes.fr/~krakowia (demande un service)
Rappel : le réseau vu de l!utilisateur (1) Communication par sockets Sacha Krakowiak Université Joseph Fourier Projet Sardes (INRIA et IMAG-LSR) http://sardes.inrialpes.fr/~krakowia (demande un service)
4. Outils pour la synchronisation F. Boyer, Laboratoire Sardes Fabienne.Boyer@imag.fr
 4. Outils pour la synchronisation F. Boyer, Laboratoire Sardes Fabienne.Boyer@imag.fr Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
4. Outils pour la synchronisation F. Boyer, Laboratoire Sardes Fabienne.Boyer@imag.fr Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
Conventions d écriture et outils de mise au point
 Logiciel de base Première année par alternance Responsable : Christophe Rippert Christophe.Rippert@Grenoble-INP.fr Introduction Conventions d écriture et outils de mise au point On va utiliser dans cette
Logiciel de base Première année par alternance Responsable : Christophe Rippert Christophe.Rippert@Grenoble-INP.fr Introduction Conventions d écriture et outils de mise au point On va utiliser dans cette
SYSTÈME DE GESTION DE FICHIERS
 SYSTÈME DE GESTION DE FICHIERS - DISQUE 1 Les couches logiciels réponse requête Requêtes E/S Système E/S Pilote E/S Interruptions utilisateur traitement S.E. commandes S.E. S.E. matériel Contrôleur E/S
SYSTÈME DE GESTION DE FICHIERS - DISQUE 1 Les couches logiciels réponse requête Requêtes E/S Système E/S Pilote E/S Interruptions utilisateur traitement S.E. commandes S.E. S.E. matériel Contrôleur E/S
Méthodes de programmation systèmes UE n NSY103. Notes de cours. Nombre d'heures : 55h (~18 + 1 cours de 3 heures)
") Méthodes de programmation systèmes UE n NSY103 Notes de cours Code de l UE : NSY103 Titre de la formation : Méthodes de programmation systèmes Ouvert : Ouvert Type de diplôme : Unité de valeur CNAM. Nombre
Méthodes de programmation systèmes UE n NSY103 Notes de cours Code de l UE : NSY103 Titre de la formation : Méthodes de programmation systèmes Ouvert : Ouvert Type de diplôme : Unité de valeur CNAM. Nombre
DNS Server RPC Interface buffer overflow. Céline COLLUMEAU Nicolas BODIN
 Mémoire DNS Server RPC Interface buffer overflow Céline COLLUMEAU Nicolas BODIN 3 janvier 2009 Table des matières 1 Introduction 2 2 Présentation de la faille 3 3 Exemple d exploitation 5 4 Solutions 10
Mémoire DNS Server RPC Interface buffer overflow Céline COLLUMEAU Nicolas BODIN 3 janvier 2009 Table des matières 1 Introduction 2 2 Présentation de la faille 3 3 Exemple d exploitation 5 4 Solutions 10
DAns un système multi-utilisateurs à temps partagé, plusieurs processus
 Chapitre 8 Ordonnancement des processus Dns un système multi-utilisateurs à temps partagé, plusieurs processus peuvent être présents en mémoire centrale en attente d exécution. Si plusieurs processus sont
Chapitre 8 Ordonnancement des processus Dns un système multi-utilisateurs à temps partagé, plusieurs processus peuvent être présents en mémoire centrale en attente d exécution. Si plusieurs processus sont
Programmation impérative
 Programmation impérative Cours 4 : Manipulation des fichiers en C Catalin Dima Organisation des fichiers Qqs caractéristiques des fichiers : Nom (+ extension). Chemin d accès absolu = suite des noms des
Programmation impérative Cours 4 : Manipulation des fichiers en C Catalin Dima Organisation des fichiers Qqs caractéristiques des fichiers : Nom (+ extension). Chemin d accès absolu = suite des noms des
3IS - Système d'exploitation linux - Programmation système
 3IS - Système d'exploitation linux - Programmation système 2010 David Picard Contributions de : Arnaud Revel, Mickaël Maillard picard@ensea.fr Environnement Les programmes peuvent être exécutés dans des
3IS - Système d'exploitation linux - Programmation système 2010 David Picard Contributions de : Arnaud Revel, Mickaël Maillard picard@ensea.fr Environnement Les programmes peuvent être exécutés dans des
<Insert Picture Here> Solaris pour la base de donnés Oracle
 Solaris pour la base de donnés Oracle Alain Chéreau Oracle Solution Center Agenda Compilateurs Mémoire pour la SGA Parallélisme RAC Flash Cache Compilateurs
Solaris pour la base de donnés Oracle Alain Chéreau Oracle Solution Center Agenda Compilateurs Mémoire pour la SGA Parallélisme RAC Flash Cache Compilateurs
Introduction aux Machines Virtuelles avec VMKit
 Introduction aux Machines Virtuelles avec Ingénieur :, Responsables : Gaël Thomas, Gilles Müller EQUIPE REGAL LIP6 INRIA (Paris/France) un substrat de machine virtuelle : a substrate for Managed Runtime
Introduction aux Machines Virtuelles avec Ingénieur :, Responsables : Gaël Thomas, Gilles Müller EQUIPE REGAL LIP6 INRIA (Paris/France) un substrat de machine virtuelle : a substrate for Managed Runtime
Ordinateurs, Structure et Applications
 Ordinateurs, Structure et Applications Cours 13, Le DOS Etienne Tremblay Université Laval, Hiver 2011 Cours 13, p.1 Le DOS DOS signifie Disk Operating System Le DOS est un système d exploitation. Il existe
Ordinateurs, Structure et Applications Cours 13, Le DOS Etienne Tremblay Université Laval, Hiver 2011 Cours 13, p.1 Le DOS DOS signifie Disk Operating System Le DOS est un système d exploitation. Il existe
Initiation à la sécurité
 Initiation à la sécurité UE Systèmes informatiques 12 septembre 2011 Julien Raeis - http://raeis.iiens.net/ Présentation Ingénieur IIE 2005 Carrière dans la sécurité des systèmes Consultant en sécurité
Initiation à la sécurité UE Systèmes informatiques 12 septembre 2011 Julien Raeis - http://raeis.iiens.net/ Présentation Ingénieur IIE 2005 Carrière dans la sécurité des systèmes Consultant en sécurité
Projet de Veille Technologique
 Projet de Veille Technologique Programmation carte à puce - JavaCard Ing. MZOUGHI Ines (i.mzoughi@gmail.com) Dr. MAHMOUDI Ramzi (mahmoudr@esiee.fr) TEST Sommaire Programmation JavaCard Les prérequis...
Projet de Veille Technologique Programmation carte à puce - JavaCard Ing. MZOUGHI Ines (i.mzoughi@gmail.com) Dr. MAHMOUDI Ramzi (mahmoudr@esiee.fr) TEST Sommaire Programmation JavaCard Les prérequis...
Vers du matériel libre
 Février 2011 La liberté du logiciel n est qu une partie du problème. Winmodems Modem traditionnel Bon fonctionnement Plus cher Electronique propriétaire Blob sur DSP intégré au modem Bien reçu par les
Février 2011 La liberté du logiciel n est qu une partie du problème. Winmodems Modem traditionnel Bon fonctionnement Plus cher Electronique propriétaire Blob sur DSP intégré au modem Bien reçu par les
Temps Réel. Jérôme Pouiller <j.pouiller@sysmic.org> Septembre 2011
 Temps Réel Jérôme Pouiller Septembre 2011 Ordonnancement avec contraintes de précédance Problèmatique des accès concurents Problème liés aux partage de ressources Solutions utres
Temps Réel Jérôme Pouiller Septembre 2011 Ordonnancement avec contraintes de précédance Problèmatique des accès concurents Problème liés aux partage de ressources Solutions utres
Programmation système
 Programmation système Christine Solnon Table des matières 1 Les processus 2 1.1 Etats d un processus................................... 2 1.2 Descripteur d un processus (PCB)...........................
Programmation système Christine Solnon Table des matières 1 Les processus 2 1.1 Etats d un processus................................... 2 1.2 Descripteur d un processus (PCB)...........................
Cours 1: Java et les objets
 Ressources Les interface homme-machine et le langage Java DUT première année Henri Garreta, Faculté des Sciences (Luminy) Cyril Pain-Barre & Sébastien Nedjar, IUT d Aix-Marseille (Aix) Cours 1: infodoc.iut.univ-aix.fr/~ihm/
Ressources Les interface homme-machine et le langage Java DUT première année Henri Garreta, Faculté des Sciences (Luminy) Cyril Pain-Barre & Sébastien Nedjar, IUT d Aix-Marseille (Aix) Cours 1: infodoc.iut.univ-aix.fr/~ihm/
Les microcontrôleurs dans les systèmes embarqués
 Haute école spécialisée bernoise Technique et informatique Section d Electricité et systèmes de communication Laboratoire d Informatique technique Les microcontrôleurs dans les systèmes embarqués Ce manuscrit
Haute école spécialisée bernoise Technique et informatique Section d Electricité et systèmes de communication Laboratoire d Informatique technique Les microcontrôleurs dans les systèmes embarqués Ce manuscrit
Introduction : les processus. Introduction : les threads. Plan
 IN328 Programmation distribuée avec Java et J2EE 2 - Threads en Java Introduction : les processus Un processus est un ensemble d instructions à exécuter, un espace mémoire réservé et éventuellement d autres
IN328 Programmation distribuée avec Java et J2EE 2 - Threads en Java Introduction : les processus Un processus est un ensemble d instructions à exécuter, un espace mémoire réservé et éventuellement d autres
Cours de Programmation Impérative: Zones de mémoires et pointeurs
 Cours de Programmation Impérative: Zones de mémoires et pointeurs Julien David A101 - david@lipn.univ-paris13.fr Julien David (A101 - david@lipn.univ-paris13.fr) 1 / 1 Z`o n`e s `d`e m`é m`o i r`e Julien
Cours de Programmation Impérative: Zones de mémoires et pointeurs Julien David A101 - david@lipn.univ-paris13.fr Julien David (A101 - david@lipn.univ-paris13.fr) 1 / 1 Z`o n`e s `d`e m`é m`o i r`e Julien
Les avantages de la virtualisation sont multiples. On peut citer:
 1 Les mécanismes de virtualisation ont été introduits il y a fort longtemps dans les années 60 par IBM avec leur système CP/CMS. La motivation première de la virtualisation est la possibilité d'isoler
1 Les mécanismes de virtualisation ont été introduits il y a fort longtemps dans les années 60 par IBM avec leur système CP/CMS. La motivation première de la virtualisation est la possibilité d'isoler
Argument-fetching dataflow machine de G.R. Gao et J.B. Dennis (McGill, 1988) = machine dataflow sans flux de données
 = machine dataflow sans flux de données") EARTH et Threaded-C: Éléments clés du manuel de références de Threaded-C Bref historique de EARTH et Threaded-C Ancêtres de l architecture EARTH: Slide 1 Machine à flux de données statique de J.B. Dennis
EARTH et Threaded-C: Éléments clés du manuel de références de Threaded-C Bref historique de EARTH et Threaded-C Ancêtres de l architecture EARTH: Slide 1 Machine à flux de données statique de J.B. Dennis
Expérience d un hébergeur public dans la sécurisation des sites Web, CCK. Hinda Feriani Ghariani Samedi 2 avril 2005 Hammamet
 Expérience d un hébergeur public dans la sécurisation des sites Web, CCK Hinda Feriani Ghariani Samedi 2 avril 2005 Hammamet Plan Introduction Sécurisation des sites Web hébergés a Conclusion Introduction
Expérience d un hébergeur public dans la sécurisation des sites Web, CCK Hinda Feriani Ghariani Samedi 2 avril 2005 Hammamet Plan Introduction Sécurisation des sites Web hébergés a Conclusion Introduction