Bus de communication
|
|
|
- Florent Paré
- il y a 10 ans
- Total affichages :
Transcription
1 Bus de communication Sylvain MONTAGNY Bâtiment chablais, bureau Retrouver tous les documents de Cours/TD/TP sur le site

2 Présentation des cours : Sommaire Cours : 12 h en 8 séances Étude de norme des protocoles Étude de documentations constructeur Application notes Datasheet One Wire bus SPI I2C CAN LIN Zigbee Université de Savoie 2

3 Présentation TP TD : 20 h en 5 séances Mise en place de différents bus de communication sur base microcontrôleurs/fpga : One Wire bus >> Capteur de température DS1820 SPI >> Connexion Maître esclave µc Pic 16F877 I2C >> Codec Audio 24 bits WM8731 >> Connexion Horloge Tps Réel (RTC) / PIC CAN >> Connexion Multi-Maître µc Pic 16F877 LIN >> Communication simple via UART Zigbee >> Etablissement d un réseau complet Université de Savoie 3

4 Bus de communication Les protocoles que nous allons étudier sont des protocoles de couches basses. Pour faire fonctionner le bus de communication il faut : Maîtriser le protocole de couche basse (SPI, CAN, One-wire ) Comprendre le protocole de couche haute, spécifique à chaque composant (l ordre des requêtes, le contenu de chaque réponse, etc ) ou l inventer si celui-ci n existe pas. Université de Savoie 4
 ou l inventer si celui-ci n existe pas.")
5 One-wire Université de Savoie 5

6 One-wire Caractéristiques générales (1) Page 1 à 3 de AN1199 (Microchip) De quel constructeur ce bus de communication est (registered trademark)? Quelle est le domaine d application? Débit : Nombre de fils : Université de Savoie 6

7 One-wire Caractéristiques générales (2) Asynchrone Type maître-esclave (single master, multi salves) Half duplex, Bidirectionnelle LSB first Bit oriented Possibilité d alimenter les esclaves 7

8 One-wire Prérequis matériel Etre capable de générer des delays de 1µs. Ligne IO bidirectionnel I/O Open drain avec pull up (interne ou externe) Université de Savoie 8
")
9 One-wire Les 4 opérations Quatre opérations : Reset Write 1 Write 0 Read bit Université de Savoie 9

10 Université de Savoie 10
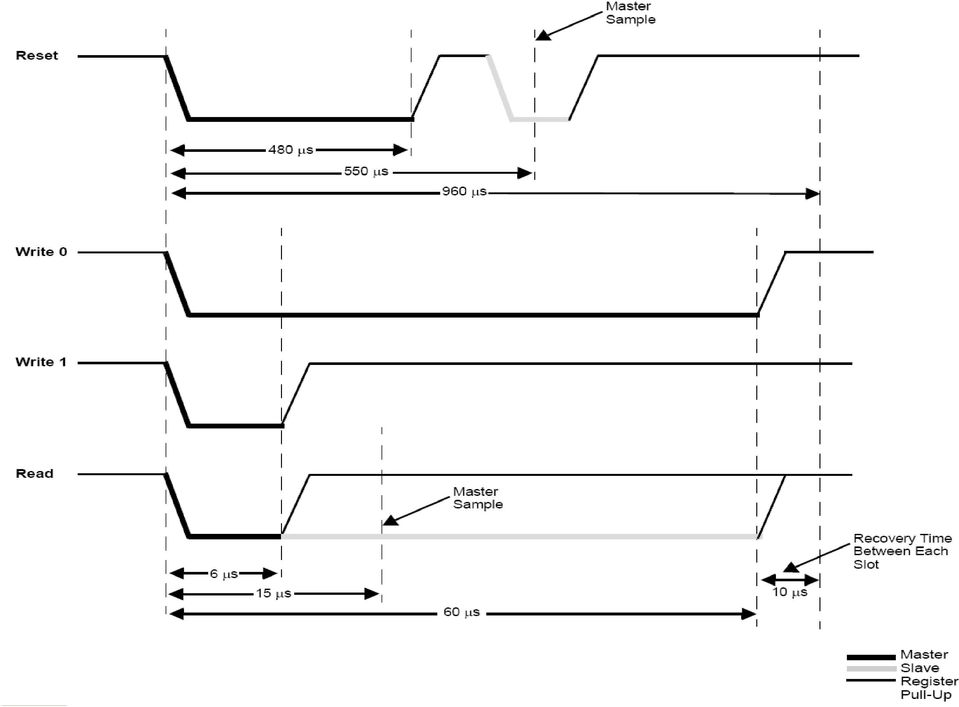
11 int reset(void) { int presence; TRISE.F2=0; PORTE.F2=0; delay_us(480); TRISE.F2=1; delay_us(70); presence=porte.f2; delay_us(410); return presence; } int read(void) { int valeur; TRISE.F2=0; PORTE.F2=0; delay_us(6); TRISE.F2=1; delay_us(9); valeur=porte.f2; delay_us(55); return valeur; } void write_0(void) { TRISE.F2=0; PORTE.F2=0; delay_us(60); TRISE.F2=1; delay_us(10); } void write_1 (void) { TRISE.F2=0; PORTE.F2=0; delay_us(6); TRISE.F2=1; delay_us(64); } void write_byte(char sdata) { int i; } for(i=0;i<8;i++){ if( ( (sdata>>i) & 0x01) ==1) write_1(); else write_0(); }
; } void write_1 (void) { TRISE.F2=0; PORTE.F2=0; delay_us(6); TRISE.")
12 One-wire Application Réaliser la lecture de la température du capteur DS1820 (One- Wire digital thermometer) Affichage sur des leds ou sur le LCD Université de Savoie 12

13 SPI Université de Savoie 13
14 SPI Caractéristiques générales (1) Document : Mid Range MCU Family : DS31017A. Baptisé SPI (Serial Peripheral Interface) par motorola. Quelle est le domaine d application? Débit : Jusqu à plusieurs Mbps Nombre de fils : 4 Université de Savoie 14

15 SPI Caractéristiques générales (2) Synchrone Type maître-esclave (single master, multi salves) Unidirectionnel (Une ligne par direction) Full duplex Université de Savoie 15
 Full duplex")
16 SPI Connexions (1) Université de Savoie 16

17 SPI Connexions (2) Le bus SPI contient 4 signaux logiques : SCLK : Horloge (Généré par le maître) MOSI : Master OUT, Slave IN MISO : Master IN, Slave OUT SS : Slave Select, actif à l état bas, généré par le maître. Il existe d'autres noms qui sont souvent utilisés : SCK : Horloge (Généré par le maître) SDI, DI, SI : Serial Data IN SDO,DO,SO : Serial Data OUT ncs, CS, nss, STE : SS Université de Savoie 17
 SDI, DI, SI")
18 SPI L horloge (1) Il n y a pas de spécification précise dans le protocole SPI précisant les fronts d horloge pour la validation des données. En pratique, nous retrouvons 4 modes de fonctionnements, qui sont une combinaison de 2 variables : CPOL : Précise la polarité de la clock au repos (haut ou bas) CPHA : Précise si on travail sur un front montant ou sur un front descendant pour l acquisition. Université de Savoie 18
 CPHA : Précise si on travail sur un front montant")
19 SPI L horloge (2) Université de Savoie 19

20 SPI Les SSP du PIC pour le fonctionnement du SPI BSSP : Basic Synchronous Serial Port pas de gestion des polarités de la clock SSP : Synchronous Serial Port MSSP : Master Synchronous Serial Port SSP + gestion des modes maître/esclave en I 2 C Etudier le fonctionnement de la liaison SPI dans un PIC (chapitre 17.3 à ) Université de Savoie 20
 Université de Savoie 20")
21 SPI Avantages / Inconvénients Avantages Débit plus important que pour le protocole I2C Aucun arbitre car aucune collision possible Très simple Inconvénients : Monopolise plus de Pin d un boîtier que l I2C Aucun adressage possible, il faut une ligne de sélection par esclave Pas d acquittement S utilise sur des plus courtes distances que les liaison série ou CAN Université de Savoie 21
22 SPI Application (voir ) Université de Savoie 22
23 I 2 C Université de Savoie 23
24 I 2 C Caractéristiques générales (1) Document : I 2 C bus specification (NXP document) page 3 à 12 IIC : Inter Integrated Circuit Quelle est le domaine d application? Débit : Jusqu à 100 kbps en mode standard Jusqu à 400 kps en mode Fast Jusqu à 3,4 Mbps en mode High Speed Jusqu à 5 Mbps en mode Ultra Fast Nombre de fils : Université de Savoie 24
25 I 2 C Caractéristiques générales (2) Synchrone Type maître-esclave (Multi masters, multi salves) Bidirectionnel Half duplex Byte oriented transmission MSB first Université de Savoie 25
26 I 2 C Terminologie Transmitter : Celui qui envoi les données sur le bus Receiver : Celui qui reçoit les données sur le bus Master : Celui qui initie le transfert Slave : Celui est adressé pour un transfert. Université de Savoie 26
27 I 2 C Accès au bus Quel est l état de la ligne au repos? Quel est l état de la ligne si un device émet un «1» et un autre un «0»? Comment voit-on une collision? Université de Savoie 27
28 I 2 C Validité des bits / Start / Stop Validité des bits transmis : Condition de START et STOP : La donnée sur la ligne SDA doit être stable pendant toute la durée de l état haut de SCL. Une transition de HAUT à BAS sur SDA pendant que SCL est au repos (HAUT) défini une condition de START. Une transition de BAS à HAUT sur SDA pendant que SCL est au repos défini la condition de STOP.
29 I 2 C Transfert et acquittement Document NXP page 10 / chapitre 3.3 Transfert de données : Combien d octet peut-on transmettre à la suite? Comment un esclave récepteur peut il bloquer le transfert lorsqu il est occupé? Acquittement : Qui génère le coup d horloge sur SCL pour le bit d acquittement? Pendant l acquittement : Que fait le récepteur, que fait l émetteur? Que ce passe t il lorsque qu un esclave-récepteur n acquitte pas le transfert? Université de Savoie 29
30 I 2 C Arbitrage des collisions L émetteur transmettant un 1 le premier perd. Université de Savoie 30
31 I 2 C Format de la trame START condition Slave Address - 7 bits Read/Write 1 bit Data : n octets + 1 bit acquittement STOP condition Vidéo commercial de NXP : Université de Savoie 31
32 Bus CAN Université de Savoie 32
33 Bus CAN Caractéristiques générales (1) CAN : Control Area Network, BOSCH 1983 Quelle est le domaine d application? Principalement l automobile Débit (Dépend de la taille du réseau) jusqu à 1 Mbps (réseaux < 40 m) 125 kbps (réseau < 500 m). Nombre de fils : Université de Savoie 33
34 Bus CAN Caractéristiques générales (2) Asynchrone Bus Multi-Maîtres Bidirectionnel Half duplex Différentielle : moins sensible aux perturbations Byte oriented transmission Université de Savoie 34
35 Bus CAN Origines Constat dans l automobile : 2000 m de câble 1800 connexions en 1995 >> La fiabilité et la sécurité sont menacées. Les normes en matière de pollution et de consommation d énergie multiplient les capteurs et actionneurs intelligents. Le besoin de sécurité accrue (ABS, ESP, AIR-BAG ) et la demande de confort (mémorisation des réglages de conduite, climatisation régulée par passager, système de navigation ) ne font que renforcer cette tendance. Extension du bus CAN Les composants CAN se démocratisent et investissent d autres secteurs de l industrie (engins travaux publique, agricole, médical, produits numériques, systèmes électrotechnique ) Université de Savoie 35
36 Bus CAN Pourquoi un bus CAN? Câblage conventionnel Câblage CAN Tous les nœuds reçoivent le message CAN. Chaque nœud récepteur décide de l intérêt du message émit. Il est possible d interroger un nœud particulier. 36
37 Les sous couches LLC, MAC et PLS sont traitées par les circuits contrôleur de bus CAN (microcontrôleur, circuits spécialisés)
38 Bus CAN Couche physique (1) Codage NRZ (Non Return To Zero). Le niveau de tension de la ligne est maintenu pendant toute la durée durant laquelle un bit est généré dominant récessif récessif dominant récessif dominant dominant La technique du Bit Stuffing impose au transmetteur d ajouter automatiquement un bit de valeur opposée lorsqu il détecte 5 bits consécutifs dans les valeurs à transmettre. Pourquoi? Trame à l'émission avant la mise en place des bits de stuffing Trame avec bits de stuffing (S) S S
39 Bus CAN Couche physique (2) La transmission des données s effectue sur une paire par émission différentielle entre les deux lignes (CAN H et CAN L). La ligne du bus doit se terminer par des résistances de 120 Ohms. Université de Savoie 39
40 Bus CAN Format de la trame de donnée Il existe quatre types de trames spécifiques et d un intervalle de temps les séparant : Les trames de données Les trames de requête (demande d information à un nœud) Trames d erreurs (émises par n importe quel noeud dès la détection d une erreur) Des trames de surcharge (ces trames correspondent à une demande d un laps de temps entre les trames de données et de requête précédentes et successives). Note : Il existe un espace intertrame de 3 bits récessifs entre les trames de données et de requête. Université de Savoie 40
41 Bus CAN Format de la trame de donnée, doc AN713 (p 6 & 7) Retrouver le nombre de bits de chaque élément de la trame. Retrouver et isoler les différentes parties : début de trame, champ d'arbitrage, champ de commande, champ de données, champ de CRC, champ d'acquittement, fin de trame. Field name Length (bits) Purpose Start-of-frame 1 Denotes the start of frame transmission Identifier 11 Unique identifier for the data which also represent the message priority Remote transmission request (RTR) 1 Dominant (0) Identifier extension bit (IDE) 1 Dominant (0) Reserved bit (r0) 1 Dominant (0) Data length code (DLC) 4 Number of bytes of data (0-8 bytes) Data field 0 64 Data to be transmitted (length dictated by DLC field) CRC 15 Cyclic Redundancy Check CRC delimiter 1 Recessive (1) ACK slot 1 Transmitter sends recessive (1) and any receiver can assert a dominant (0) ACK delimiter 1 Recessive (1) End-of-frame (EOF) 7 Recessive (1)
42 Bus CAN Terminologie (1) Noeud : Sous-ensemble relié à un réseau de communication et capable de communiquer sur le réseau. Valeurs du bus : Les deux valeurs logiques définies ne sont pas le 0 et le 1, mais des formes dites dominante et récessive. Message : Chaque information est véhiculée sur le bus à l aide d un message (trame de bits) de format défini mais de longueur variable (et limitée). Routage des informations : Des noeuds peuvent être ajoutés au réseau sans qu il n y ait rien à modifier. Chaque message possède un identificateur (identifier) qui n indique pas la destination du message mais la signification des données du message. Ainsi tous les noeuds reçoivent le message, et chacun est capable de savoir grâce au système de filtrage si ce dernier lui est destiné ou non.
43 Bus CAN Terminologie (2) Trame de données : Une trame de données (data frame) est une trame qui transporte, comme son nom l indique, des données. Demande d une trame de données : Un noeud peut demander à un autre noeud d envoyer une trame de données, et pour cela il envoie luimême une trame de requête. La trame de données correspondant à la trame de requête initiale possède alors le même identificateur. Débit bit : Le débit bit peut varier entre différents systèmes, mais il doit être fixe et uniforme au sein d un même système. Priorités : Les identificateurs de chaque message permettent de définir quel message est prioritaire sur un autre. Fonctionnement multi-maître : Lorsque le bus est libre, chaque noeud peut décider d envoyer un message. Seul le message de plus haute priorité prend possession du bus. Université de Savoie 43
44 Bus CAN Terminologie (3) Arbitrage : Si deux noeuds ou plus tentent d émettre un message sur un bus libre il faut régler les conflits d accès. On effectue alors un arbitrage bit à bit (non destructif) tout au long du contenu de l identificateur. Ce mécanisme garantit qu il n y aura ni perte de temps, ni perte d informations. CSMA/CA (Carrier Sense Multiple Access - Collision Avoidance). Points de connexion : La liaison de communication série CAN est un bus sur lequel un nombre important d unités peuvent être raccordées. En pratique le nombre total d unités sera déterminé par les temps de retard (dus aux phénomènes de propagation) et/ou les valeurs des charges électriques que ces unités présentent sur le bus. Acquittement : Tous les récepteurs vérifient la validité d un message reçu, et dans le cas d un message correct ils doivent acquitter en émettant un flag. Université de Savoie 44
45 Bus CAN Mise en œuvre (1) Application Note Microchip AN713, An introduction to the CAN protocol that discusses the basics and key features. AN228, A CAN Physical Layer Discussion AN754, Understanding Microchip s CAN Module Bit Timing Débit en kbits/s Longueur en m
46 Les timings du bus CAN Le Nominal Bit Time Le bus CAN est défini par le temps d un bit (T BIT ou Nominal Bit Time) qui nous permettra de connaître le débit binaire (Nominal Bit Rate). Durée d'un bit = Nominal Bit Time Le problème est que les oscillateurs des différents nœuds sur le bus n ont pas la même fréquence d horloge. De plus, ces horloges ont des défauts de précision et de stabilité. Il faut donc trouver une manière spécifier la durée d un bits (Nominal Bit Time) commune à tous les nœuds. Université de Savoie 46
47 Les timings du bus CAN Le time Quantum Chaque nœud va donc définir une base de temps qui lui est propre : le Time Quantum. Cette base de temps est une fraction de l horloge de l oscillateur du bus. Elle servira d unité de temps pour la gestion de tous les timings du bus. Horloge du bus Horloge divisée >>Nouvelle unité de temps pour les timings du BUS CAN Time Quantum Durée d'un bit (entre 8 et 25 fois le time Quantum) = Nominal Bit Time
48 Les timings du bus CAN Réglage time Quantum sur PIC18F Retrouver l expression de T Q =f(brp, F OSC ) : T Q 2.( BRP 1) F OSC Université de Savoie 48
49 Les timings du bus CAN Le time Quantum (3) Université de Savoie 49
50 Les timings du bus CAN Durée d'un bit = Nominal Bit Time Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2 1 T Q 1 T Q -8T Q 1 T Q -8T Q 2T Q -8T Q Sampling Point le segment de synchronisation : Il est utilisé pour valider le fait que les nœuds sont synchronisés. En effet, une transition (début d un bit) doit s effectuer dans ce segment. Le segment de propagation : Il est utilisé pour compenser les phénomènes de temps de propagation sur le bus. (voir transparent suivant) Les segments «phase1» et «phase2» : Ils sont utilisés pour compenser les erreurs de phase et de fréquence des oscillateurs. Un rallongement ou raccourcissement de ces segments permet de resynchroniser l horloge, et d optimiser le point d échantillonnage. Le point d échantillonnage : C est le point où la valeur du bit est lue sur le bus. Il est situé à la fin du segment de phase1. Université de Savoie 50
51 Les timings du bus CAN Propagation Segment RTT = Round Trip Time >> Prog_Seg Collision!!! Pour que la collision soit vue, il faut : Propagation Segment = RTT Débit Longueur Longueur d'un bit 1 Mbit/s 30 m 1 s 800 kbit/s 50 m 1,25 s 500 kbit/s 100 m 2 s 250 kbit/s 250 m 4 s 125 kbit/s 500 m 8 s 62,5 kbit/s 1000 m 16 s 20 kbit/s 2500 m 50 s 10 kbit/s 5000 m 100 s
52 Les timings du bus CAN Phase segment Durée d'un bit = Nominal Bit Time Phase_Seg1 Phase_Seg2 1 à 3 Sampling points Environ 80% du Nominal Bit Time L agrandissement de phase_seg1 ou le raccourcissement de Phase_Seg2 permet d ajuster le point d échantillonnage. De plus Phase_Seg2 a une durée minimale représentant l IPT (Information Processing Time = Temps de quantification du bus) L échantillonnage peut être évalué plusieurs fois pour plus de robustesse 52
53 Les timings du bus CAN Synchronisation segment Nœud 1 Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2 Nœud 2 Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2 2 Nœuds CAN synchronisés Si les deux nœuds CAN ne sont pas synchronisés, la valeur lue sur le bus au moment de l échantillonnage peut être fausse. Ces retards sont gênants pour la phase d acquittement de la trame où il y a peu de temps pour finir de calculer le CRC. Deux processus peuvent intervenir pour compenser les déphasage des deux oscillateurs : La Hard Synchronisation La Resynchronisation 53
54 Les timings du bus CAN Les synchronisations (1) La Hard Synchronisation : Elle est réalisée une seule fois pendant le début d un message (Start Of Frame). L effet d une hard-synchronisation est de faire repartir le Nominal Bit Time depuis le segment de synchronisation (SYNC_SEG). Le Nominal Bit Time en cours est abandonné et un nouveau Nominal Bit Time repart (dès le Time Quantum suivant), depuis le segment de synchronisation (SYNC_SEG). La Resynchronisation Lorsque le nœud CAN récepteur relève une désynchronisation lors d un nouveau bit, il va rallonger Seg_Phase1 (+SJW) ou raccourcir Seg_phase2(- SJW) pour recaler le position du bit. La valeur de l offset SJW (Synchronization Jump Width) est paramétrable. Université de Savoie 54
55 Les timings du bus CAN Les synchronisations (2) Bit émis par un nœud sur la ligne Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2 Nœud 1 synchronisé : Le front est dans le Sync_Seg Sampling point décalé Sync_Seg Prop_Seg Phase_Seg1 SJW Phase_Seg2 Nœud 2 en avance sur le bit émis : Phase_Seg1 = Phase_Seg1 + SJW Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2 SJW Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2 Nœud 3 en retard sur le bit émis : Phase_Seg2 = Phase_Seg2 - SJW 55
56 Bus CAN Mise en œuvre dans un µc (1) Comment envoyer un message sur le µc PIC18F2480? Configurer le module ECAN : Timing : Time Quantum, Sync_Seg, Phase_Seg1, Phase_Seg2, SJW Trame Standard ou Extended, sample point, IPT (Information Processing Time) Le module ECAN s occupe : Des start/stop bits De l arbitrage du message sur la ligne Du calcul du CRC Remplir les buffers d émission (3 buffers) : TXBnSIDH TXBnSIDL TXBnEIDH TXBnEIDL TXBnDm 0<n<2 >> Pour l identificateur et 0<m<8 >> Pour les Données Le «Bus Transceiver» (MCP2551) s occupe de placer les signaux différentiels sur la ligne (CANH-CANL) 56
57 Bus CAN Mise en œuvre dans un µc (2) Comment recevoir un message? Configurer le module ECAN (Idem que pour l émission) : Timing : Time Quantum, Sync_Seg, Phase_Seg1, Phase_Seg2, SJW Trame Standard ou Extended, sample point, IPT (Information Processing Time) Déterminer les messages que nous souhaitons recevoir : Quels bits de l identificateur nous intéresse? (choix du «acceptance mask») Quels sont les valeur de ces bits? (Choix du filtre) Le module ECAN s occupe : De détecter les Start/stop bits De remplir les buffers de réceptions (si les messages reçus nous concerne) De faire la vérification du CRC. Lire les buffers de réception (2 buffers) : RXBnSIDH RXBnSIDL RXBnEIDH RXBnEIDL RXBnDm 0<n<1 >> Pour l identificateur et 0<m<8 >> Pour les Données Université de Savoie 57
58 Bus CAN Mise en œuvre dans un µc (3) Datasheet PIC18F2480 page 280 Expliquer le déroulement de l émission : Expliquer le déroulement de la réception Université de Savoie 58
59 Bus LIN 59
60 Bus LIN Caractéristiques générales (1) LIN : Local Interconnect Network Quelle est le domaine d application? Débit : Jusqu à 20 kbps Nombre de fils : Niveau de tension : 8 Volts à 18 Volts Université de Savoie 60
61 Bus LIN Caractéristiques générales (2) Asynchrone Bus Single Master / Multi Slave (up to 16) Bidirectionnel Half duplex Byte oriented transmission (sauf le signal de break) Université de Savoie 61
62 Bus LIN Le LIN permet une communication économique dans les applications où la bande passante et la polyvalence du CAN ne sont pas requises. Les réseaux automobiles modernes utilisent : Le LIN pour les applications faible coût Le CAN pour les communications plus large bande Le FlexRay pour les communications de données synchronisées haute vitesse dans les systèmes de sécurité avancés tels que la suspension active. Bus LIN CAN FlexRay Speed 20 kbit/s 1 Mbit/s 10 Mbit/s Cost $ $$ $$$ Wires or 4 Typical Applications Body Electronics (Mirrors,Power Seats, Accesories) Université de Savoie Powertrain (Engine, Transmission, ABS) High-Performance Powertrain, Safety (Drive-by-wire, active suspension, adaptive cruise control)
63 Bus LIN La trame : Header Break : Permet à l esclave de détecter la présence d un message sur le bus. Il est constitué d au moins 13 zéros. Synchronization : Sync est défini comme étant le caractère 0x55. Ce caractère permet d'effectuer une détection automatique de la vitesse de transfert afin d ajuster l horloge pour la récupération de la suite du message. Identifiant du message : Il correspondra à une adresse logique d un nœud esclave. Chaque nœud possède une adresse différente et peut avoir plusieurs adresses. Cet entête est toujours introduite par le maître. 63
64 Bus LIN La trame : Response Data: Ce champ est transmis par la tâche esclave et contient de 1 à 8 octets. Cheksum: Somme de contrôle (1 octet) Cette réponse est toujours introduite par un nœud esclave. A noter qu un nœud esclave peut être contenu par un module maître. 64
65 Bus Lin Communication Maître-Esclave Master Slave task Master task Lin message header Lin message Response Slave Slave Slave 1. Le maître émet le message d entête 2. La tache esclave contenu dans le maître émet la réponse 65
66 Bus Lin Communication Esclave-Maître Master Slave task Master task Lin message header Lin message Response Slave Slave Slave 1. Le maître émet le message d entête 2. Une tache esclave émet la réponse à destination du maître (de sa tache esclave) 66
67 Bus Lin Communication Esclave-Esclave Master Slave task Master task Lin message header Lin message Response Slave Slave Slave 1. Le maitre émet le message d entête 2. Une tache esclave émet la réponse à destination d un esclave 67
68 Bus LIN UART protocole Byte oriented Le protocole LIN est construit sur le protocole de couche basse UART, ce qui signifie que tous les octets transmis sur la ligne se font conformément au format «bit de start, data, bit de stop» A l exception du «message break» qui est constitué de 13 bits au niveau bas. Université de Savoie 68
69 Bus LIN La trame 13 bits 0x55 ID = 6 bits ID parité = 2 bits 0 Data 8 octets 1 octet PP Break Sync ID Data CheckSum Délimiteur ( 1 bit ) Délimiteur ( 1 bit ) Temps de réponse esclave Délimiteur ( 1 bit ) Université de Savoie 69
70 Bus LIN Réalisation matérielle et logicielle Dans la norme d une transmission LIN, l esclave peut avoir une désynchronisation de 15% de la fréquence d horloge du maître (avant resynchronisation). L esclave doit au minium échantillonner 10 bits pour le break. Question 1 : Retrouver la cohérence de la norme vis-à-vis des 13 bits imposés lors de l envoi du break par le maître. Question 2 : Comment mettre en oeuvre la reception de 10 bits à 0 sur une liaison série UART? Question 3 : Que va t il se passer dans l UART si les fréquence du maître et de l esclave sont synchronisés et que l UART récupère que les 10 premiers bits. Question 4 : Comment peut on mettre en œuvre la transmission de 13 bits à zéros pour générer le break depuis le maître? Université de Savoie 70
Les liaisons SPI et I2C
 DAMÉCOURT BENJAMIN AVRIL 28 Liaisons synchrones Les liaisons SPI et I2C Face arrière d un imac : trois ports USB, un port Firewire 4 et un port Firewire 8 CHRONOLOGIE ANNÉES 7 La liaison SPI et la création
DAMÉCOURT BENJAMIN AVRIL 28 Liaisons synchrones Les liaisons SPI et I2C Face arrière d un imac : trois ports USB, un port Firewire 4 et un port Firewire 8 CHRONOLOGIE ANNÉES 7 La liaison SPI et la création
Université de La Rochelle. Réseaux TD n 6
 Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Cours n 12. Technologies WAN 2nd partie
 Cours n 12 Technologies WAN 2nd partie 1 Sommaire Aperçu des technologies WAN Technologies WAN Conception d un WAN 2 Lignes Louées Lorsque des connexions dédiées permanentes sont nécessaires, des lignes
Cours n 12 Technologies WAN 2nd partie 1 Sommaire Aperçu des technologies WAN Technologies WAN Conception d un WAN 2 Lignes Louées Lorsque des connexions dédiées permanentes sont nécessaires, des lignes
Le multiplexage. Sommaire
 Sommaire Table des matières 1- GENERALITES... 2 1-1 Introduction... 2 1-2 Multiplexage... 4 1-3 Transmission numérique... 5 2- LA NUMERATION HEXADECIMALE Base 16... 8 3- ARCHITECTURE ET PROTOCOLE DES RESEAUX...
Sommaire Table des matières 1- GENERALITES... 2 1-1 Introduction... 2 1-2 Multiplexage... 4 1-3 Transmission numérique... 5 2- LA NUMERATION HEXADECIMALE Base 16... 8 3- ARCHITECTURE ET PROTOCOLE DES RESEAUX...
Master d'informatique 1ère année Réseaux et protocoles. Couche physique
 Master d'informatique 1ère année Réseaux et protocoles Couche physique Bureau S3-354 Mailto:[email protected] http://saquet.users.greyc.fr/m1/rezopro Supports de communication Quelques exemples :
Master d'informatique 1ère année Réseaux et protocoles Couche physique Bureau S3-354 Mailto:[email protected] http://saquet.users.greyc.fr/m1/rezopro Supports de communication Quelques exemples :
NanoSense. Protocole Modbus de la sonde Particules P4000. (Version 01F)
") NanoSense 123 rue de Bellevue, 92100 Boulogne Billancourt France Tél : 33-(0) 1 41 41 00 02, fax : 33-(0) 1 41 41 06 72 Protocole Modbus de la sonde Particules P4000 (Version 01F) Ver V01A V01B V01C V01D
NanoSense 123 rue de Bellevue, 92100 Boulogne Billancourt France Tél : 33-(0) 1 41 41 00 02, fax : 33-(0) 1 41 41 06 72 Protocole Modbus de la sonde Particules P4000 (Version 01F) Ver V01A V01B V01C V01D
Transmissions série et parallèle
 1. Introduction : Un signal numérique transmet généralement plusieurs digits binaires. Exemple : 01000001 ( huit bits). Dans une transmission numérique on peut envisager deux modes : les envoyer tous en
1. Introduction : Un signal numérique transmet généralement plusieurs digits binaires. Exemple : 01000001 ( huit bits). Dans une transmission numérique on peut envisager deux modes : les envoyer tous en
TD 1 - Transmission en bande de passe
 Claude Duvallet Université du Havre UFR Sciences et Techniques 25 rue Philippe Lebon - BP 540 76058 LE HAVRE CEDEX [email protected] Claude Duvallet 1/10 Transmission en bande de passe (1/2) Description
Claude Duvallet Université du Havre UFR Sciences et Techniques 25 rue Philippe Lebon - BP 540 76058 LE HAVRE CEDEX [email protected] Claude Duvallet 1/10 Transmission en bande de passe (1/2) Description
Les Réseaux sans fils : IEEE 802.11. F. Nolot
 Les Réseaux sans fils : IEEE 802.11 F. Nolot 1 Les Réseaux sans fils : IEEE 802.11 Historique F. Nolot 2 Historique 1er norme publiée en 1997 Débit jusque 2 Mb/s En 1998, norme 802.11b, commercialement
Les Réseaux sans fils : IEEE 802.11 F. Nolot 1 Les Réseaux sans fils : IEEE 802.11 Historique F. Nolot 2 Historique 1er norme publiée en 1997 Débit jusque 2 Mb/s En 1998, norme 802.11b, commercialement
Fiche technique CPU 314SC/DPM (314-6CG13)
") Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Description d'une liaison
 escription d'une liaison I. Constitution d'une liaison...2 II. Modes d'exploitation...2 III. Normalisation des jonctions...2 III.1. Norme V28 (RS232) 3 III.2. Norme V11 (RS422 et RS485) 4 IV. Liaison V24
escription d'une liaison I. Constitution d'une liaison...2 II. Modes d'exploitation...2 III. Normalisation des jonctions...2 III.1. Norme V28 (RS232) 3 III.2. Norme V11 (RS422 et RS485) 4 IV. Liaison V24
Fonctions de la couche physique
 La Couche physique 01010110 01010110 Couche physique Signal Médium Alain AUBERT [email protected] 0 Fonctions de la couche physique 1 1 Services assurés par la couche physique Transmettre
La Couche physique 01010110 01010110 Couche physique Signal Médium Alain AUBERT [email protected] 0 Fonctions de la couche physique 1 1 Services assurés par la couche physique Transmettre
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Ordinateurs, Structure et Applications
 Ordinateurs, Structure et Applications Cours 19, Le USB Etienne Tremblay Université Laval, Hiver 2012 Cours 19, p.1 USB signifie Universal Serial Bus USB Le USB a été conçu afin de remplacer le port série
Ordinateurs, Structure et Applications Cours 19, Le USB Etienne Tremblay Université Laval, Hiver 2012 Cours 19, p.1 USB signifie Universal Serial Bus USB Le USB a été conçu afin de remplacer le port série
Dossier technique. Présentation du bus DMX et Utilisation des options EL13 / EL14 ERM AUTOMATISMES INDUSTRIELS 1 LE PROTOCOLE DMX 2
 ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : [email protected] 1
ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : [email protected] 1
UE 503 L3 MIAGE. Initiation Réseau et Programmation Web La couche physique. A. Belaïd
 UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Bus CAN & protocoles
 Bus CAN & protocoles Sommaire Chapitre 1 : Introduction CAN / CANopen Définitions, historique, concept, normes & domaines d application Chapitre 2 : Caractéristiques d un nœud CAN Physiques & Logiques
Bus CAN & protocoles Sommaire Chapitre 1 : Introduction CAN / CANopen Définitions, historique, concept, normes & domaines d application Chapitre 2 : Caractéristiques d un nœud CAN Physiques & Logiques
Télécommunications. Plan
 Télécommunications A.Maizate - EHTP 2010/2011 Plan Concepts généraux: Téléinformatique Liaison de Téléinformatique Sens de transmission Types de transmission Parallèle Série Techniques de Transmission
Télécommunications A.Maizate - EHTP 2010/2011 Plan Concepts généraux: Téléinformatique Liaison de Téléinformatique Sens de transmission Types de transmission Parallèle Série Techniques de Transmission
2. Couche physique (Couche 1 OSI et TCP/IP)
") 2. Couche physique (Couche 1 OSI et TCP/IP) 2.1 Introduction 2.2 Signal 2.3 Support de transmission 2.4 Adaptation du signal aux supports de transmission 2.5 Accès WAN 2.1 Introduction Introduction Rôle
2. Couche physique (Couche 1 OSI et TCP/IP) 2.1 Introduction 2.2 Signal 2.3 Support de transmission 2.4 Adaptation du signal aux supports de transmission 2.5 Accès WAN 2.1 Introduction Introduction Rôle
Câblage des réseaux WAN. www.ofppt.info
 Office de la Formation Professionnelle et de la Promotion du Travail Câblage des réseaux WAN C-D-002.doc Mars 1-7 Sommaire 1. Couche physique WAN... 3 1.1. Connexions série WAN... 4 1.2. Routeurs et connexions
Office de la Formation Professionnelle et de la Promotion du Travail Câblage des réseaux WAN C-D-002.doc Mars 1-7 Sommaire 1. Couche physique WAN... 3 1.1. Connexions série WAN... 4 1.2. Routeurs et connexions
Architectures et Protocoles des Réseaux
 Chapitre 5 - Les réseaux xdsl Claude Duvallet Université du Havre UFR Sciences et Techniques 25 rue Philippe Lebon - BP 540 76058 LE HAVRE CEDEX [email protected] Claude Duvallet 1/32 Plan de la
Chapitre 5 - Les réseaux xdsl Claude Duvallet Université du Havre UFR Sciences et Techniques 25 rue Philippe Lebon - BP 540 76058 LE HAVRE CEDEX [email protected] Claude Duvallet 1/32 Plan de la
Fiche technique CPU 315SN/PN (315-4PN33)
") Fiche technique CPU 315SN/PN (315-4PN33) Données techniques N de commande 315-4PN33 Information générale Note - Caractéristiques SPEED-Bus - Données techniques de l'alimentation Alimentation (valeur nominale)
Fiche technique CPU 315SN/PN (315-4PN33) Données techniques N de commande 315-4PN33 Information générale Note - Caractéristiques SPEED-Bus - Données techniques de l'alimentation Alimentation (valeur nominale)
DTS MOBATime's Distributed Time System
 GPS ou DCF 77 DTS Masterclock DTS Manager et DTS Master Software DTS MOBATime's Distributed Time System LAN Le serveur de temps multi-usage dans le nouveau Distributed Time System de MOBATIME, basé sur
GPS ou DCF 77 DTS Masterclock DTS Manager et DTS Master Software DTS MOBATime's Distributed Time System LAN Le serveur de temps multi-usage dans le nouveau Distributed Time System de MOBATIME, basé sur
EP 2 339 758 A1 (19) (11) EP 2 339 758 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 29.06.2011 Bulletin 2011/26
 (11) EP 2 339 758 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 29.06.2011 Bulletin 2011/26") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 339 758 A1 (43) Date de publication: 29.06.2011 Bulletin 2011/26 (21) Numéro de dépôt: 09179459.4 (51) Int Cl.: H04B 1/69 (2011.01) H03K 5/08 (2006.01) H03K
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 339 758 A1 (43) Date de publication: 29.06.2011 Bulletin 2011/26 (21) Numéro de dépôt: 09179459.4 (51) Int Cl.: H04B 1/69 (2011.01) H03K 5/08 (2006.01) H03K
Présentation du modèle OSI(Open Systems Interconnection)
") Présentation du modèle OSI(Open Systems Interconnection) Les couches hautes: Responsables du traitement de l'information relative à la gestion des échanges entre systèmes informatiques. Couches basses:
Présentation du modèle OSI(Open Systems Interconnection) Les couches hautes: Responsables du traitement de l'information relative à la gestion des échanges entre systèmes informatiques. Couches basses:
NOTIONS DE RESEAUX INFORMATIQUES
 NOTIONS DE RESEAUX INFORMATIQUES GENERALITES Définition d'un réseau Un réseau informatique est un ensemble d'équipements reliés entre eux afin de partager des données, des ressources et d'échanger des
NOTIONS DE RESEAUX INFORMATIQUES GENERALITES Définition d'un réseau Un réseau informatique est un ensemble d'équipements reliés entre eux afin de partager des données, des ressources et d'échanger des
Systèmes et Réseaux (ASR 2) - Notes de cours Cours 14
 - Notes de cours Cours 14") Systèmes et Réseaux (ASR ) - Notes de cours Cours Anne Benoit May, 0 PARTIE : Systèmes PARTIE : Réseaux Architecture des réseaux de communication La couche -liaison La couche -réseau Algorithmes de routage
Systèmes et Réseaux (ASR ) - Notes de cours Cours Anne Benoit May, 0 PARTIE : Systèmes PARTIE : Réseaux Architecture des réseaux de communication La couche -liaison La couche -réseau Algorithmes de routage
Chaine de transmission
 Chaine de transmission Chaine de transmission 1. analogiques à l origine 2. convertis en signaux binaires Échantillonnage + quantification + codage 3. brassage des signaux binaires Multiplexage 4. séparation
Chaine de transmission Chaine de transmission 1. analogiques à l origine 2. convertis en signaux binaires Échantillonnage + quantification + codage 3. brassage des signaux binaires Multiplexage 4. séparation
Errata et mises à jour
 Errata et mises à jour Modifications du chapitre 9. Le tableau page 74 est remplacé par le suivant. Technologie Débit descendant / montant en Kbit/s Distance maximale sans répéteur de paires Codage HDSL
Errata et mises à jour Modifications du chapitre 9. Le tableau page 74 est remplacé par le suivant. Technologie Débit descendant / montant en Kbit/s Distance maximale sans répéteur de paires Codage HDSL
I. TRANSMISSION DE DONNEES
 TD I. TRANSMISSION DE DONNEES 1. QU'EST-CE QU'UN CANAL DE TRANSMISSION? 1.1 Rappels Une ligne de transmission est une liaison entre les deux machines. On désigne généralement par le terme émetteur la machine
TD I. TRANSMISSION DE DONNEES 1. QU'EST-CE QU'UN CANAL DE TRANSMISSION? 1.1 Rappels Une ligne de transmission est une liaison entre les deux machines. On désigne généralement par le terme émetteur la machine
Chapitre 2 : communications numériques.
 Chapitre 2 : communications numériques. 1) généralités sur les communications numériques. A) production d'un signal numérique : transformation d'un signal analogique en une suite d'éléments binaires notés
Chapitre 2 : communications numériques. 1) généralités sur les communications numériques. A) production d'un signal numérique : transformation d'un signal analogique en une suite d'éléments binaires notés
ADSL. Étude d une LiveBox. 1. Environnement de la LiveBox TMRIM 2 EME TRIMESTRE LP CHATEAU BLANC 45120 CHALETTE/LOING NIVEAU :
 LP CHATEAU BLANC 45120 CHALETTE/LOING THEME : ADSL BAC PROFESSIONNEL MICRO- INFORMATIQUE ET RESEAUX : INSTALLATION ET MAINTENANCE ACADÉMIE D ORLÉANS-TOURS 2 EME TRIMESTRE NIVEAU : TMRIM Étude d une LiveBox
LP CHATEAU BLANC 45120 CHALETTE/LOING THEME : ADSL BAC PROFESSIONNEL MICRO- INFORMATIQUE ET RESEAUX : INSTALLATION ET MAINTENANCE ACADÉMIE D ORLÉANS-TOURS 2 EME TRIMESTRE NIVEAU : TMRIM Étude d une LiveBox
Description du logiciel Modbus RTU
 Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 1 de 57 Description du logiciel Modbus RTU Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 2 de 57 Sommaire Description
Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 1 de 57 Description du logiciel Modbus RTU Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 2 de 57 Sommaire Description
Cisco Certified Network Associate
 Cisco Certified Network Associate Version 4 Notions de base sur les réseaux Chapitre 8 01 Quelle couche OSI est responsable de la transmission binaire, de la spécification du câblage et des aspects physiques
Cisco Certified Network Associate Version 4 Notions de base sur les réseaux Chapitre 8 01 Quelle couche OSI est responsable de la transmission binaire, de la spécification du câblage et des aspects physiques
VIII- Circuits séquentiels. Mémoires
 1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
Plan du Travail. 2014/2015 Cours TIC - 1ère année MI 30
 Plan du Travail Chapitre 1: Internet et le Web : Définitions et historique Chapitre 2: Principes d Internet Chapitre 3 : Principaux services d Internet Chapitre 4 : Introduction au langage HTML 2014/2015
Plan du Travail Chapitre 1: Internet et le Web : Définitions et historique Chapitre 2: Principes d Internet Chapitre 3 : Principaux services d Internet Chapitre 4 : Introduction au langage HTML 2014/2015
Réseau Global MIDI Note applicative
 Réseau Global MIDI Note applicative 1 But du manuel Le but de cette note applicative est de démystifié l utilisation du MIDI transporté dans un Réseau Global MIDI. Ce réseau virtuel offre sans aucune restriction,
Réseau Global MIDI Note applicative 1 But du manuel Le but de cette note applicative est de démystifié l utilisation du MIDI transporté dans un Réseau Global MIDI. Ce réseau virtuel offre sans aucune restriction,
Administration des ressources informatiques
 1 2 La mise en réseau consiste à relier plusieurs ordinateurs en vue de partager des ressources logicielles, des ressources matérielles ou des données. Selon le nombre de systèmes interconnectés et les
1 2 La mise en réseau consiste à relier plusieurs ordinateurs en vue de partager des ressources logicielles, des ressources matérielles ou des données. Selon le nombre de systèmes interconnectés et les
Plan. Programmation Internet Cours 3. Organismes de standardisation
 Plan Programmation Internet Cours 3 Kim Nguy ên http://www.lri.fr/~kn 1. Système d exploitation 2. Réseau et Internet 2.1 Principes des réseaux 2.2 TCP/IP 2.3 Adresses, routage, DNS 30 septembre 2013 1
Plan Programmation Internet Cours 3 Kim Nguy ên http://www.lri.fr/~kn 1. Système d exploitation 2. Réseau et Internet 2.1 Principes des réseaux 2.2 TCP/IP 2.3 Adresses, routage, DNS 30 septembre 2013 1
Le bus USB. I) Introduction : II) Architecture du bus USB :
 Introduction : II) Architecture du bus USB :") Le bus USB I) Introduction : Le bus USB est comme son nom l'indique un bus série (Universal Serial Bus). Le bus USB s'est répandu de façon très significative ces dernières années, que ce soit dans les
Le bus USB I) Introduction : Le bus USB est comme son nom l'indique un bus série (Universal Serial Bus). Le bus USB s'est répandu de façon très significative ces dernières années, que ce soit dans les
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
À propos de ce Guide de Configuration EtherSound
 À propos de ce Guide de Configuration EtherSound Ces dernières années, on a vu apparaître un certain nombre de technologies réseau assurant la gestion et le contrôle centralisés d installations audio de
À propos de ce Guide de Configuration EtherSound Ces dernières années, on a vu apparaître un certain nombre de technologies réseau assurant la gestion et le contrôle centralisés d installations audio de
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
ORDONNANCEMENT CONJOINT DE TÂCHES ET DE MESSAGES DANS LES RÉSEAUX TEMPS RÉELS 4. QUELQUES EXEMPLES DU DYNAMISME ACTUEL DU TEMPS RÉEL
 i LE TEMPS RÉEL 1. PRÉSENTATION DU TEMPS RÉEL 1.1. APPLICATIONS TEMPS RÉEL 1.2. CONTRAINTES DE TEMPS RÉEL 2. STRUCTURES D'ACCUEIL POUR LE TEMPS RÉEL 2.1. EXÉCUTIFS TEMPS RÉEL 2.2. RÉSEAUX LOCAUX TEMPS
i LE TEMPS RÉEL 1. PRÉSENTATION DU TEMPS RÉEL 1.1. APPLICATIONS TEMPS RÉEL 1.2. CONTRAINTES DE TEMPS RÉEL 2. STRUCTURES D'ACCUEIL POUR LE TEMPS RÉEL 2.1. EXÉCUTIFS TEMPS RÉEL 2.2. RÉSEAUX LOCAUX TEMPS
Transmission de données. A) Principaux éléments intervenant dans la transmission
 Principaux éléments intervenant dans la transmission") Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Présentation Générale
 Présentation Générale Modem routeur LAN Inte rnet Système de connectivités Plan Modem synchrone et Asynchrone La famille xdsl Wifi et WiMax Le protocole Point à Point : PPP Le faisceau hertzien Et le Satellite.
Présentation Générale Modem routeur LAN Inte rnet Système de connectivités Plan Modem synchrone et Asynchrone La famille xdsl Wifi et WiMax Le protocole Point à Point : PPP Le faisceau hertzien Et le Satellite.
II/ Le modèle OSI II.1/ Présentation du modèle OSI(Open Systems Interconnection)
") II/ Le modèle OSI II.1/ Présentation du modèle OSI(Open Systems Interconnection) II.2/ Description des couches 1&2 La couche physique s'occupe de la transmission des bits de façon brute sur un canal de
II/ Le modèle OSI II.1/ Présentation du modèle OSI(Open Systems Interconnection) II.2/ Description des couches 1&2 La couche physique s'occupe de la transmission des bits de façon brute sur un canal de
1) Où est le problème? Chère lectrice, cher lecteur, On est entre nous, alors on va se tutoyer.
 Où est le problème? Chère lectrice, cher lecteur, On est entre nous, alors on va se tutoyer.") QUAND LE MAITRE ET SES ESCLAVES PRENNENT LE BUS... OU INITIATION AU PROTOCOLE I²C Chère lectrice, cher lecteur, On est entre nous, alors on va se tutoyer. L objet de ce document est de te faire comprendre
QUAND LE MAITRE ET SES ESCLAVES PRENNENT LE BUS... OU INITIATION AU PROTOCOLE I²C Chère lectrice, cher lecteur, On est entre nous, alors on va se tutoyer. L objet de ce document est de te faire comprendre
T101, serveur de temps haute précision
 T101, serveur de temps haute précision T101Compact Serveur de temps NTP/SNTP, horloge GPS de strate 1, avec PoE, et fonctions d entrées/sorties d échantillonnage et de synchronisation. T101Rack 1 Bd d
T101, serveur de temps haute précision T101Compact Serveur de temps NTP/SNTP, horloge GPS de strate 1, avec PoE, et fonctions d entrées/sorties d échantillonnage et de synchronisation. T101Rack 1 Bd d
Introduction. Adresses
 Architecture TCP/IP Introduction ITC7-2: Cours IP ESIREM Infotronique Olivier Togni, LE2I (038039)3887 [email protected] 27 février 2008 L Internet est basé sur l architecture TCP/IP du nom
Architecture TCP/IP Introduction ITC7-2: Cours IP ESIREM Infotronique Olivier Togni, LE2I (038039)3887 [email protected] 27 février 2008 L Internet est basé sur l architecture TCP/IP du nom
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Kit pédagogique RFID-EDUC
 Plateau Technique Systèmes électroniques communicants Kit pédagogique RFID-EDUC Support de TP Version enseignant CRESITT Industrie Eric Devoyon - PPT_RFIDEDUC_002ED2012-2.1-05.2012 Le CRT CRESITT est soutenu
Plateau Technique Systèmes électroniques communicants Kit pédagogique RFID-EDUC Support de TP Version enseignant CRESITT Industrie Eric Devoyon - PPT_RFIDEDUC_002ED2012-2.1-05.2012 Le CRT CRESITT est soutenu
Les techniques de multiplexage
 Les techniques de multiplexage 1 Le multiplexage et démultiplexage En effet, à partir du moment où plusieurs utilisateurs se partagent un seul support de transmission, il est nécessaire de définir le principe
Les techniques de multiplexage 1 Le multiplexage et démultiplexage En effet, à partir du moment où plusieurs utilisateurs se partagent un seul support de transmission, il est nécessaire de définir le principe
Téléinformatique. Chapitre V : La couche liaison de données dans Internet. ESEN Université De La Manouba
 Téléinformatique Chapitre V : La couche liaison de données dans Internet ESEN Université De La Manouba Les techniques DSL La bande passante du service voix est limitée à 4 khz, cependant la bande passante
Téléinformatique Chapitre V : La couche liaison de données dans Internet ESEN Université De La Manouba Les techniques DSL La bande passante du service voix est limitée à 4 khz, cependant la bande passante
Organisation du module
 Organisation du module Cours: 2 séances de TD (3H) + DS (1h30, commun avec TP) Introduction à la téléphonie d entreprise : Matériel, configurations et possibilités courantes Voix sur IP, Téléphonie sur
Organisation du module Cours: 2 séances de TD (3H) + DS (1h30, commun avec TP) Introduction à la téléphonie d entreprise : Matériel, configurations et possibilités courantes Voix sur IP, Téléphonie sur
2. MAQUETTAGE DES SOLUTIONS CONSTRUCTIVES. 2.2 Architecture fonctionnelle d un système communicant. http://robert.cireddu.free.
 2. MAQUETTAGE DES SOLUTIONS CONSTRUCTIVES 2.2 Architecture fonctionnelle d un système communicant Page:1/11 http://robert.cireddu.free.fr/sin LES DÉFENSES Objectifs du COURS : Ce cours traitera essentiellement
2. MAQUETTAGE DES SOLUTIONS CONSTRUCTIVES 2.2 Architecture fonctionnelle d un système communicant Page:1/11 http://robert.cireddu.free.fr/sin LES DÉFENSES Objectifs du COURS : Ce cours traitera essentiellement
PIC EVAL Dev Board PIC18F97J60
 PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
La Voix sur IP OLIVIER D.
 2013 La Voix sur IP OLIVIER D. Table des matières 1 Introduction... 3 2 La téléphonie... 3 3 Principe physique de la voix... 5 4 La PABX (ou autocommutateur)... 6 5 La Voix sur IP... 7 6 Architecture de
2013 La Voix sur IP OLIVIER D. Table des matières 1 Introduction... 3 2 La téléphonie... 3 3 Principe physique de la voix... 5 4 La PABX (ou autocommutateur)... 6 5 La Voix sur IP... 7 6 Architecture de
Multimedia. Systèmes, Communications et Applications. Ahmed MEHAOUA
 Multimedia Systèmes, Communications et Applications Ahmed MEHAOUA Professeur - Laboratoire CRIP5 [email protected] Plan 1. Multimedia : principes et définitions 2. Algorithmes et normes
Multimedia Systèmes, Communications et Applications Ahmed MEHAOUA Professeur - Laboratoire CRIP5 [email protected] Plan 1. Multimedia : principes et définitions 2. Algorithmes et normes
Boîtier de contrôle et de commande avec EV 3/2 voies intégrée
 A B C Boîtier de contrôle et de commande avec EV 3/2 voies intégrée Conception Le boîtier de contrôle / commande type GEMÜ avec électrovanne pilote 3/2 voies intégrée pour les actionneurs pneumatiques
A B C Boîtier de contrôle et de commande avec EV 3/2 voies intégrée Conception Le boîtier de contrôle / commande type GEMÜ avec électrovanne pilote 3/2 voies intégrée pour les actionneurs pneumatiques
ISO/CEI 11172-3 NORME INTERNATIONALE
 NORME INTERNATIONALE ISO/CEI 11172-3 Première édition 1993-08-01 Technologies de l information - Codage de l image animée et du son associé pour les supports de stockage numérique jusqu à environ Ii5 Mbit/s
NORME INTERNATIONALE ISO/CEI 11172-3 Première édition 1993-08-01 Technologies de l information - Codage de l image animée et du son associé pour les supports de stockage numérique jusqu à environ Ii5 Mbit/s
CLIP. (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant
 Appareil autonome affichant le numéro appelant") 1. Besoin CLIP (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant ETUDE FONCTIONNELLE De très nombreux abonnés du réseau téléphonique commuté ont exprimé le besoin
1. Besoin CLIP (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant ETUDE FONCTIONNELLE De très nombreux abonnés du réseau téléphonique commuté ont exprimé le besoin
Le service IPv4 multicast pour les sites RAP
 Le service IPv4 multicast pour les sites RAP Description : Ce document présente le service IPv4 multicast pour les sites sur RAP Version actuelle : 1.2 Date : 08/02/05 Auteurs : NM Version Dates Remarques
Le service IPv4 multicast pour les sites RAP Description : Ce document présente le service IPv4 multicast pour les sites sur RAP Version actuelle : 1.2 Date : 08/02/05 Auteurs : NM Version Dates Remarques
Les Réseaux Informatiques
 Les Réseaux Informatiques Licence Informatique, filière SMI Université Mohammed-V Agdal Faculté des Sciences Rabat, Département Informatique Avenue Ibn Batouta, B.P. 1014 Rabat Professeur Enseignement
Les Réseaux Informatiques Licence Informatique, filière SMI Université Mohammed-V Agdal Faculté des Sciences Rabat, Département Informatique Avenue Ibn Batouta, B.P. 1014 Rabat Professeur Enseignement
BM Le bus USB 09/05/2013. Le Port USB
 Le Port USB 1 USB : Universal Serial Bus L'Universal Serial Bus (USB) est un bus informatique (série synchrone), il sert à brancher des périphériques informatiques à un hôte (ordinateur). 1)Historique
Le Port USB 1 USB : Universal Serial Bus L'Universal Serial Bus (USB) est un bus informatique (série synchrone), il sert à brancher des périphériques informatiques à un hôte (ordinateur). 1)Historique
Mentions légales (non traduites)... 3. 1. Introduction... 4. 2. Légendes... 4. 3. Schémas de raccordement... 5. 4. Configuration de la S16...
... 3. 1. Introduction... 4. 2. Légendes... 4. 3. Schémas de raccordement... 5. 4. Configuration de la S16...") 1 2 Table des matières Consignes de sécurité importantes (non traduites)... 3 Mentions légales (non traduites)... 3 Garantie limitée (non traduite)... 3 1. Introduction... 4 2. Légendes... 4 3. Schémas
1 2 Table des matières Consignes de sécurité importantes (non traduites)... 3 Mentions légales (non traduites)... 3 Garantie limitée (non traduite)... 3 1. Introduction... 4 2. Légendes... 4 3. Schémas
Le signal GPS. Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz
 Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
NFC Near Field Communication
 NFC Near Field Communication 19/11/2012 Aurèle Lenfant NFC - Near Field Communication 1 Sommaire! Introduction! Fonctionnement! Normes! Codage! Intérêts! Usages! Sécurité NFC - Near Field Communication
NFC Near Field Communication 19/11/2012 Aurèle Lenfant NFC - Near Field Communication 1 Sommaire! Introduction! Fonctionnement! Normes! Codage! Intérêts! Usages! Sécurité NFC - Near Field Communication
CONVERTISSEUR RS 232/485 NOTICE
 CONVERTISSEUR RS 232/485 068745 068745 NOTICE Ce convertisseur TCP/IP permet de convertir tous équipements à liaison série et de les superviser sur un réseau LAN. Sommaire 1 Description du produit...2
CONVERTISSEUR RS 232/485 068745 068745 NOTICE Ce convertisseur TCP/IP permet de convertir tous équipements à liaison série et de les superviser sur un réseau LAN. Sommaire 1 Description du produit...2
Technologies xdsl. 1 Introduction 2 1.1 Une courte histoire d Internet... 2 1.2 La connexion à Internet... 3 1.3 L évolution... 3
 Technologies xdsl Table des matières 1 Introduction 2 1.1 Une courte histoire d Internet.......................................... 2 1.2 La connexion à Internet..............................................
Technologies xdsl Table des matières 1 Introduction 2 1.1 Une courte histoire d Internet.......................................... 2 1.2 La connexion à Internet..............................................
RÉSEAUX INFORMATIQUES, MODÈLE OSI ET PROTOCOLE TCP/IP
 RÉSEAUX INFORMATIQUES, MODÈLE OSI ET PROTOCOLE TCP/IP TODO : -.6.4.3 à.6.4.8 : schémas - 4.3..3 : nouvel exemple n ayant pas besoin d utiliser ni le premier ni le dernier sous-réseau v..5.5 0/05/00 peignotc(at)arqendra(dot)net
RÉSEAUX INFORMATIQUES, MODÈLE OSI ET PROTOCOLE TCP/IP TODO : -.6.4.3 à.6.4.8 : schémas - 4.3..3 : nouvel exemple n ayant pas besoin d utiliser ni le premier ni le dernier sous-réseau v..5.5 0/05/00 peignotc(at)arqendra(dot)net
xdsl Digital Suscriber Line «Utiliser la totalité de la bande passante du cuivre»
 xdsl Digital Suscriber Line «Utiliser la totalité de la bande passante du cuivre» Le marché en France ~ 9 millions d abonnés fin 2005 ~ 6 millions fin 2004 dont la moitié chez l opérateur historique et
xdsl Digital Suscriber Line «Utiliser la totalité de la bande passante du cuivre» Le marché en France ~ 9 millions d abonnés fin 2005 ~ 6 millions fin 2004 dont la moitié chez l opérateur historique et
Plan. École Supérieure d Économie Électronique. Plan. Chap 9: Composants et systèmes de sécurité. Rhouma Rhouma. 21 Juillet 2014
 École Supérieure d Économie Électronique Chap 9: Composants et systèmes de sécurité 1 Rhouma Rhouma 21 Juillet 2014 2 tagging et port trunk Création des via les commandes sur switch cisco 1 / 48 2 / 48
École Supérieure d Économie Électronique Chap 9: Composants et systèmes de sécurité 1 Rhouma Rhouma 21 Juillet 2014 2 tagging et port trunk Création des via les commandes sur switch cisco 1 / 48 2 / 48
Couche Transport TCP et UDP
 Partie 7: Couche Transport TCP et UDP Ahmed Mehaoua - 1 Le Modèle OSI Application Présentation Session Transport Réseau Liaison Physique Application Présentation Session Transport Réseau Liaison Physique
Partie 7: Couche Transport TCP et UDP Ahmed Mehaoua - 1 Le Modèle OSI Application Présentation Session Transport Réseau Liaison Physique Application Présentation Session Transport Réseau Liaison Physique
ELP 304 : Électronique Numérique. Cours 1 Introduction
 ELP 304 : Électronique Numérique Cours 1 Introduction Catherine Douillard Dépt Électronique Les systèmes numériques : généralités (I) En électronique numérique, le codage des informations utilise deux
ELP 304 : Électronique Numérique Cours 1 Introduction Catherine Douillard Dépt Électronique Les systèmes numériques : généralités (I) En électronique numérique, le codage des informations utilise deux
2. DIFFÉRENTS TYPES DE RÉSEAUX
 TABLE DES MATIÈRES 1. INTRODUCTION 1 2. GÉNÉRALITÉS 5 1. RÔLES DES RÉSEAUX 5 1.1. Objectifs techniques 5 1.2. Objectifs utilisateurs 6 2. DIFFÉRENTS TYPES DE RÉSEAUX 7 2.1. Les réseaux locaux 7 2.2. Les
TABLE DES MATIÈRES 1. INTRODUCTION 1 2. GÉNÉRALITÉS 5 1. RÔLES DES RÉSEAUX 5 1.1. Objectifs techniques 5 1.2. Objectifs utilisateurs 6 2. DIFFÉRENTS TYPES DE RÉSEAUX 7 2.1. Les réseaux locaux 7 2.2. Les
Cisco Certified Network Associate Version 4
 Cisco Certified Network Associate Version 4 Protocoles et concepts de routage Chapitre 2 Le résultat de la commande Router# show interfaces serial 0/1 est le suivant : Serial0/1 is up, line protocol is
Cisco Certified Network Associate Version 4 Protocoles et concepts de routage Chapitre 2 Le résultat de la commande Router# show interfaces serial 0/1 est le suivant : Serial0/1 is up, line protocol is
La norme Midi et JavaSound
 La norme Midi et JavaSound V 1.0-14.2.2006 (update Fev. 07) Jacques Ferber LIRMM - Université Montpellier II 161 rue Ada 34292 Montpellier Cedex 5 Email: [email protected] Home page: www.lirmm.fr/~ferber
La norme Midi et JavaSound V 1.0-14.2.2006 (update Fev. 07) Jacques Ferber LIRMM - Université Montpellier II 161 rue Ada 34292 Montpellier Cedex 5 Email: [email protected] Home page: www.lirmm.fr/~ferber
TABLE DES MATIERES. I. Objectifs page 2. II. Types de réseaux page 2. III. Transmission page 2. IV. Câbles page 3. V.
 TABLE DES MATIERES I. Objectifs page 2 II. Types de réseaux page 2 III. Transmission page 2 1. Série ou parallèle page 2 2. Codage page 3 IV. Câbles page 3 V. Topologie page 4 VI. Types de réseaux locaux
TABLE DES MATIERES I. Objectifs page 2 II. Types de réseaux page 2 III. Transmission page 2 1. Série ou parallèle page 2 2. Codage page 3 IV. Câbles page 3 V. Topologie page 4 VI. Types de réseaux locaux
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Michel VONGVILAY Gabriel NGUYEN NGOC Grégory WOLOWIEC
 Enseignant responsable : Etienne DURIS Michel VONGVILAY Gabriel NGUYEN NGOC Grégory WOLOWIEC I. Introduction...4 II. III. Généralités...5 II.1. Bluetooth SIG...5 II.2. Description...5 II.3. Usage...6 La
Enseignant responsable : Etienne DURIS Michel VONGVILAY Gabriel NGUYEN NGOC Grégory WOLOWIEC I. Introduction...4 II. III. Généralités...5 II.1. Bluetooth SIG...5 II.2. Description...5 II.3. Usage...6 La
Réseaux Mobiles et Haut Débit
 Réseaux Mobiles et Haut Débit Worldwide Interoperability for Microwave Access 2007-2008 Ousmane DIOUF Tarik BOUDJEMAA Sadek YAHIAOUI Plan Introduction Principe et fonctionnement Réseau Caractéristiques
Réseaux Mobiles et Haut Débit Worldwide Interoperability for Microwave Access 2007-2008 Ousmane DIOUF Tarik BOUDJEMAA Sadek YAHIAOUI Plan Introduction Principe et fonctionnement Réseau Caractéristiques
Algorithmique des Systèmes Répartis Protocoles de Communications
 Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE
 EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
Voix et Téléphonie sur IP : Architectures et plateformes
 Voix et Téléphonie sur IP : Architectures et plateformes Alex Corenthin Département Génie Informatique Laboratoire de traitement de l Information Ecole Supérieure Polytechnique Université Cheikh Anta Diop
Voix et Téléphonie sur IP : Architectures et plateformes Alex Corenthin Département Génie Informatique Laboratoire de traitement de l Information Ecole Supérieure Polytechnique Université Cheikh Anta Diop
Chapitre VII : Principes des réseaux. Structure des réseaux Types de réseaux La communication Les protocoles de communication
 Chapitre VII : Principes des réseaux Structure des réseaux Types de réseaux La communication Les protocoles de communication Introduction Un système réparti est une collection de processeurs (ou machines)
Chapitre VII : Principes des réseaux Structure des réseaux Types de réseaux La communication Les protocoles de communication Introduction Un système réparti est une collection de processeurs (ou machines)
DimNet Gradateurs Numériques Evolués Compulite. CompuDim 2000
 DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
DOSSIER ADSL. DEMARCHE DE TRAVAIL : Consultez rapidement le dossier avant de commencer Complétez le dossier en suivant les indications du document
 DOSSIER ADSL OBJECTIFS DU DOSSIER : Dans le dossier suivant, nous vous proposons de découvrir les spécificités des lignes à haut débit. Nous verrons notamment deux dossiers : L ADSL (Asymmetric Digital
DOSSIER ADSL OBJECTIFS DU DOSSIER : Dans le dossier suivant, nous vous proposons de découvrir les spécificités des lignes à haut débit. Nous verrons notamment deux dossiers : L ADSL (Asymmetric Digital
module Introduction aux réseaux DHCP et codage Polytech 2011 1/ 5
 DHCP et codage DHCP ( Dynamic Host Configuration Protocol RFC 2131 et 2132) est un protocole client serveur qui permet à un client hôte d un réseau local (Ethernet ou Wifi) d obtenir d un serveur DHCP
DHCP et codage DHCP ( Dynamic Host Configuration Protocol RFC 2131 et 2132) est un protocole client serveur qui permet à un client hôte d un réseau local (Ethernet ou Wifi) d obtenir d un serveur DHCP
RTP et RTCP. EFORT http://www.efort.com
 RTP et RTCP EFORT http://www.efort.com Pour transporter la voix ou la vidéo sur IP, le protocole IP (Internet Protocol) au niveau 3 et le protocole UDP (User Datagram Protocol) au niveau 4 sont utilisés.
RTP et RTCP EFORT http://www.efort.com Pour transporter la voix ou la vidéo sur IP, le protocole IP (Internet Protocol) au niveau 3 et le protocole UDP (User Datagram Protocol) au niveau 4 sont utilisés.
1 Définition et présentation. 2 Le réseau Numéris. 3 Les services. 3.1 Les services Support (Bearer service) SYNTHESE
 SYNTHESE") 1 Définition et présentation RNIS = Réseau Numérique à Intégration de Services En Anglais = ISDN = Integrated Services Digital Network Le RNIS est une liaison autorisant une meilleure qualité que le RTC
1 Définition et présentation RNIS = Réseau Numérique à Intégration de Services En Anglais = ISDN = Integrated Services Digital Network Le RNIS est une liaison autorisant une meilleure qualité que le RTC
PocketNet SNMP/Modbus
 Volume 1 RBEI-ADISCOM Manuel utilisateur PocketNet SNMP/Modbus CONVERTISSEUR SERIE - ETHERNET Manuel utilisateur PocketNet SNMP/Modbus Table des matières CHAPITRE 1 Caractéristiques utiles à la mise en
Volume 1 RBEI-ADISCOM Manuel utilisateur PocketNet SNMP/Modbus CONVERTISSEUR SERIE - ETHERNET Manuel utilisateur PocketNet SNMP/Modbus Table des matières CHAPITRE 1 Caractéristiques utiles à la mise en
UDP/TCP - Protocoles transport
 UDP/TCP - Protocoles transport ISEN/ITII- UDP/TCP 1 Plan UDP : LE PROTOCOLE TRANSPORT DATAGRAM Concept de ports Format du datagramme TCP : LE PROTOCOLE DE TRANSPORT FIABLE Connexion Segmentation Fenêtrage
UDP/TCP - Protocoles transport ISEN/ITII- UDP/TCP 1 Plan UDP : LE PROTOCOLE TRANSPORT DATAGRAM Concept de ports Format du datagramme TCP : LE PROTOCOLE DE TRANSPORT FIABLE Connexion Segmentation Fenêtrage
MultiMedia Board. Système de développement. Manuel utilisateur. pour PIC32MX4
 MultiMedia Board pour PIC32MX4 Les systèmes de développement sont des outils irremplaçables pour le développement et la programmation des microcontrôleurs. Un choix attentif des composants ainsi que l
MultiMedia Board pour PIC32MX4 Les systèmes de développement sont des outils irremplaçables pour le développement et la programmation des microcontrôleurs. Un choix attentif des composants ainsi que l
SYSTEME DE GESTION DES ENERGIES EWTS EMBEDDED WIRELESS TELEMETRY SYSTEM
 SYSTEME DE GESTION DES ENERGIES EWTS EMBEDDED WIRELESS TELEMETRY SYSTEM Copyright TECH 2012 Technext - 8, avenue Saint Jean - 06400 CANNES Société - TECHNEXT France - Tel : (+ 33) 6 09 87 62 92 - Fax :
SYSTEME DE GESTION DES ENERGIES EWTS EMBEDDED WIRELESS TELEMETRY SYSTEM Copyright TECH 2012 Technext - 8, avenue Saint Jean - 06400 CANNES Société - TECHNEXT France - Tel : (+ 33) 6 09 87 62 92 - Fax :
DYNTEST AML (Alarme/Moniteur/Logger) Surveillance du filtre à particules
 Surveillance du filtre à particules") DYNTEST AML (Alarme/Moniteur/Logger) Surveillance du filtre à particules COMMANDE (Control Box) avec faisceau de câbles raccordé CONDUITE DE PRESSION y incl. Instructions d installation et matériel de
DYNTEST AML (Alarme/Moniteur/Logger) Surveillance du filtre à particules COMMANDE (Control Box) avec faisceau de câbles raccordé CONDUITE DE PRESSION y incl. Instructions d installation et matériel de
Réseaux grande distance
 Chapitre 5 Réseaux grande distance 5.1 Définition Les réseaux à grande distance (WAN) reposent sur une infrastructure très étendue, nécessitant des investissements très lourds. Contrairement aux réseaux
Chapitre 5 Réseaux grande distance 5.1 Définition Les réseaux à grande distance (WAN) reposent sur une infrastructure très étendue, nécessitant des investissements très lourds. Contrairement aux réseaux