Mesure des efforts d un compacteur en vibration. Intervenant : Pierre-Olivier Vandanjon Date : 20 février 2005
|
|
|
- Eléonore Leclerc
- il y a 10 ans
- Total affichages :
Transcription
1 Mesure des efforts d un compacteur en vibration Intervenant : Pierre-Olivier Vandanjon Date : 20 février 2005

2 Mesure des efforts d un compacteur en vibration Intervenant : Pierre-Olivier Vandanjon Date : 20 février 2005

3 Introduction Présentation du compacteur Existant Modélisation du compacteur Modélisation DHM complète Modélisation DHM d une bille Identification Validation de la méthode sur chantier Conclusion

4 Introduction Contexte : Modernisation de l execution des chantiers routiers. Historique : La force totale appliquée Modélisation et identification dynamique des engins de construction des routes Modélisation dynamique d un compacteur avec balourd Objectif : Estimer les efforts de contact entre un compacteur et le matériau compacté

5 Introduction Présentation du compacteur Existant Modélisation du compacteur Modélisation DHM complète Modélisation DHM d une bille Identification Validation de la méthode sur chantier Conclusion

6 Un compacteur tandem vibrant

7 A quoi ça sert?
8 A Compacter des matériaux granulaires A quoi ça sert?

9 A quoi ça sert? A Compacter des matériaux granulaires Transmettre des sollicitations au matériau

10 A quoi ça sert? A Compacter des matériaux granulaires Transmettre des sollicitations au matériau Réarranger les grains du matériau

11 A quoi ça sert? A Compacter des matériaux granulaires Transmettre des sollicitations au matériau Réarranger les grains du matériau Réduire le volume occupé par le matériau

12 A quoi ça sert? A Compacter des matériaux granulaires Transmettre des sollicitations au matériau Réarranger les grains du matériau Réduire le volume occupé par le matériau Améliorer les caractéristiques mécaniques du matériau

13 Comment ça marche?
14 Comment ça marche? Engin de masse importante (plusieurs tonnes) : Charge statique
 :")
15 Comment ça marche? Engin de masse importante (plusieurs tonnes) : Charge statique Système vibrant : Charge dynamique

16 Comment ça marche? Engin de masse importante (plusieurs tonnes) : Charge statique Système vibrant : Charge dynamique Objectif : Estimer les efforts de contact entre le compacteur et le matériau

17 Un compacteur tandem vibrant : Le CB544

18 Un compacteur tandem vibrant : Le CB544 Masse opérationnelle Masse au cylindre avant Masse au cylindre arrière Commande de la vibration Entraînement des balourd Fréquences Amplitudes Force centrifuge par cylindre kg 5170 kg 5530 kg indépendante pour chaque cylindre hydraulique direct 42/50 Hz 0,58/0,33 mm 86800/69500 N

19

20 Existant
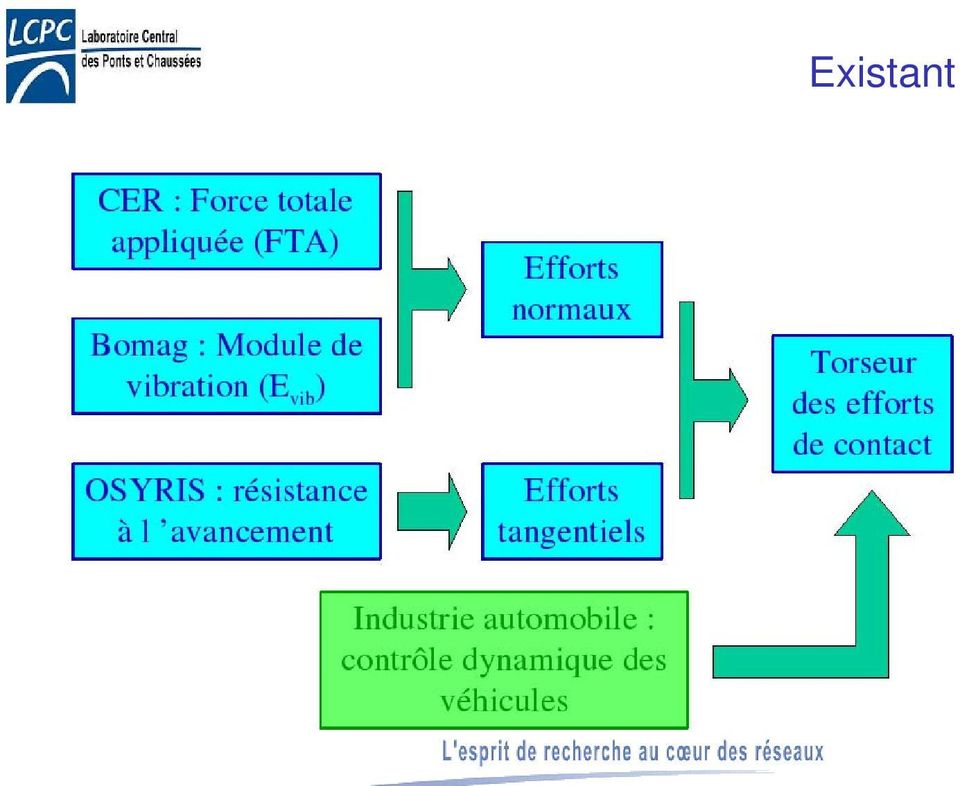
21 La Force Totale Appliquée FTA = M 1 g + (M 1 M 0 )Γ chassis + M 0 Γ balourd + meω 2 sin φ
22 Bomag BCG Le Bomag Compaction Manager est un système qui mesure un paramètre physique (le module de vibration) du matériau compacté en temps réel. Ce paramètre est corrélé à la compacité au travers d une loi de comportement. Ainsi, il est possible de connaître l état de compacité du matériau pendant la mise en œuvre de celui-ci.
23 BCM : principe
24 Osyris : principe
25 Introduction Présentation du compacteur Existant Modélisation du compacteur Modélisation DHM complète Modélisation DHM d une bille Identification Validation de la méthode sur chantier Conclusion
26 Structure du compacteur
27 Structure du compacteur
28 Structure du compacteur
29 Questions sur la modélisation
30 Questions sur la modélisation Est-ce que pour estimer les efforts de contact entre les billes et le matériau, une modélisation complète du complète du compacteur est nécessaire?
31 Questions sur la modélisation Est-ce que pour estimer les efforts de contact entre les billes et le matériau, une modélisation complète du complète du compacteur est nécessaire? Non.
32 Questions sur la modélisation Est-ce que pour estimer les efforts de contact entre les billes et le matériau, une modélisation complète du complète du compacteur est nécessaire? Non. Pourquoi?
33 Questions sur la modélisation Est-ce que pour estimer les efforts de contact entre les billes et le matériau, une modélisation complète du complète du compacteur est nécessaire? Non. Pourquoi? S il y avait un capteur d effort au niveau du contact, il n y aurait pas besoin de modèle,
34 Questions sur la modélisation Est-ce que pour estimer les efforts de contact entre les billes et le matériau, une modélisation complète du complète du compacteur est nécessaire? Non. Pourquoi? S il y avait un capteur d effort au niveau du contact, il n y aurait pas besoin de modèle, Il suffit donc de modéliser la partie entre le capteur d effort et le contact.
35 structure fermée d une bille z1 x1 z0 x2,x3,x4,x10,x11 x0 z3,z4,z5,z8,z9,z10,z11 z2 z6 x6 x7,x8,x9 z7
36 structure arborescente équivalente z0,z1 x0 x3,x4,x5 x1 x2 z3,z4,z5,z6,z7 x6,x7 z2
37 structure arborescente équivalente C 0 : étrier de la bille, C 1, C 2 : corps virtuels permettant de définir les degrés de liberté des articulations élastiques de fixations de la bille, C 3 : plaque support du moteur gauche, C 4 : demi-bille gauche, C 5 : balourd, C 6 : plaque support du moteur droit, C 7 : demi-bille droite,
38 Equations du couple des moteurs de translation : mesure de la résistance à l avancement Γ 4 = ZZ 4( ω 3 x + q 4 ) + FV 4 q 4 + FS4signe( q 4 ) + CZ 4 (1) Γ 7 = ZZ 7( ω 6 x + q 7 ) + FV 7 q 7 + FS7signe( q 7 ) + CZ 7 (2)
39 Equations du couple des moteurs de translation : mesure de la résistance à l avancement Γ 4 = ZZ 4( ω 3 x + q 4 ) + FV 4 q 4 + FS4signe( q 4 ) + CZ 4 (1) Γ 7 = ZZ 7( ω 6 x + q 7 ) + FV 7 q 7 + FS7signe( q 7 ) + CZ 7 (2) Les moteurs hydrauliques jouent le rôle de capteur d effort (mesure du couple moteur),
40 Equations du couple des moteurs de translation : mesure de la résistance à l avancement Γ 4 = ZZ 4( ω 3 x + q 4 ) + FV 4 q 4 + FS4signe( q 4 ) + CZ 4 (1) Γ 7 = ZZ 7( ω 6 x + q 7 ) + FV 7 q 7 + FS7signe( q 7 ) + CZ 7 (2) Les moteurs hydrauliques jouent le rôle de capteur d effort (mesure du couple moteur), Il faut mesurer l accélération absolue en rotation des demi-billes,
41 Equations du couple des moteurs de translation : mesure de la résistance à l avancement Γ 4 = ZZ 4( ω 3 x + q 4 ) + FV 4 q 4 + FS4signe( q 4 ) + CZ 4 (1) Γ 7 = ZZ 7( ω 6 x + q 7 ) + FV 7 q 7 + FS7signe( q 7 ) + CZ 7 (2) Les moteurs hydrauliques jouent le rôle de capteur d effort (mesure du couple moteur), Il faut mesurer l accélération absolue en rotation des demi-billes, Avec ces mesures et l identification des paramètres du modèle, il est possible de calculer le couple de résistance à l avancement pour chaque demi-bille.
42 Equations (simplifiées) de la force de l articulation élastique verticale : mesure de la réaction du sol x Γ 1 = V 3 cos(q 3) V y 3 sin(q 3) (M3 + M4 + M5 + M6 + M7) (ω x 3 + q 5) 2 cos(q 3 + q 5 ) + ( ω x 3 + q 5) sin(q 3 + q 5 ) MX5 + (ω x 3 + q 5) 2 sin(q 3 + q 5 ) ( ω x 3 + q 5) cos(q 3 + q 5 ) MY 5 (3) +FX4 + FX7 x Γ 2 = V 3 sin(q 3) + V y 3 cos(q 3) (M3 + M4 + M5 + M6 + M7) (ω x 3 + q 5) 2 sin(q 3 + q 5 ) ( ω x 3 + q 5) cos(q 3 + q 5 ) MX5 (ω x 3 + q 5) 2 cos(q 3 + q 5 ) + ( ω x 3 + q 5) sin(q 3 + q 5 ) MY 5 (4) +FY 4 + FY 7
43 Modèle d articulation élastique Modèle visco-élastique : Γ i = Ci q i Kiq i (5) Domaine de validité limité en fréquence Paramètres différents pour des fréquences de fonctionnement différentes
44 Interprétation de la mesure de la réaction du sol F = M V + C q + Kq + F c (6)
45 Interprétation de la mesure de la réaction du sol F = M V + C q + Kq + F c (6) Les articulations élastiques jouent le rôle de capteur d effort (calcul de l effort élastique à partir de la mesure du déplacement),
46 Interprétation de la mesure de la réaction du sol F = M V + C q + Kq + F c (6) Les articulations élastiques jouent le rôle de capteur d effort (calcul de l effort élastique à partir de la mesure du déplacement), Il faut mesurer la vitesse et l accélération absolue en rotation de l arbre à balourds,
47 Interprétation de la mesure de la réaction du sol F = M V + C q + Kq + F c (6) Les articulations élastiques jouent le rôle de capteur d effort (calcul de l effort élastique à partir de la mesure du déplacement), Il faut mesurer la vitesse et l accélération absolue en rotation de l arbre à balourds, Il faut mesurer l accélération absolue en translation des plaques support des moteurs.
48 Interprétation de la mesure de la réaction du sol F = M V + C q + Kq + F c (6) Les articulations élastiques jouent le rôle de capteur d effort (calcul de l effort élastique à partir de la mesure du déplacement), Il faut mesurer la vitesse et l accélération absolue en rotation de l arbre à balourds, Il faut mesurer l accélération absolue en translation des plaques support des moteurs. Avec ces mesures et l identification des paramètres du modèle, il est possible de calculer la réaction du sol pour la bille.
49 Introduction Présentation du compacteur Existant Modélisation du compacteur Modélisation DHM complète Modélisation DHM d une bille Identification Validation de la méthode sur chantier Conclusion
50 Analyse des paramètres à identifier
51 Analyse des paramètres à identifier Paramètres inertiels : Mb = M3 + M4 + M5 + M6 + M7, MX5, MY 5, ZZ 4, ZZ 7
52 Analyse des paramètres à identifier Paramètres inertiels : Mb = M3 + M4 + M5 + M6 + M7, MX5, MY 5, ZZ 4, ZZ 7 Paramètres de frottements : FV 4, FS4, FV 7, FS7
53 Analyse des paramètres à identifier Paramètres inertiels : Mb = M3 + M4 + M5 + M6 + M7, MX5, MY 5, ZZ 4, ZZ 7 Paramètres de frottements : FV 4, FS4, FV 7, FS7 Paramètres de liaison visco-élastique : C1, K 1, C2, K 2
54 Essais d identification Deux configurations utilisées : 1. Bille posée sur le banc Schenck Identification des paramètres du modèle de liaison élastique (Mb, C1, K 1) 2. Compacteur sur chandelles Identification des paramètres du modèle sans vibration (ZZ 4, FV 4, FS4, ZZ 7, FV 7, FS7) Identification des paramètres du modèle avec vibration (C2, K 2, MX5, MY 5)
55 Problème complexe : Instrumentation
56 Instrumentation Problème complexe : Mesure du déplacement des articulations élastiques
57 Instrumentation Problème complexe : Mesure du déplacement des articulations élastiques Mesure de l accélération de la bille
58 Instrumentation Problème complexe : Mesure du déplacement des articulations élastiques Mesure de l accélération de la bille Mesure de la rotation de l arbre à balourds
59 Instrumentation Problème complexe : Mesure du déplacement des articulations élastiques Mesure de l accélération de la bille Mesure de la rotation de l arbre à balourds Mesure de la rotation des billes
60 Instrumentation Problème complexe : Mesure du déplacement des articulations élastiques Mesure de l accélération de la bille Mesure de la rotation de l arbre à balourds Mesure de la rotation des billes Mesure des couples moteur
61 Essais sur le banc Schenck Excitation de la bille avant du compacteur par un vérin hydraulique d une capacité en force de 100 kn
62 Essais sur le banc Schenck Bridage de l étrier de la bille avant sur le massif de réaction afin de rendre ses mouvements négligeables
63 Résultats des essais sur le banc Schenck FX4 FX7 = Mb V x 3 + C1 bruitblanc q 1 + K 1 bruitblanc q (7) Paramètres Unités ˆX σ ˆX (%) Mb kg ,12 C1 bruitblanc N.m 1.s 31, ,55 K 1 bruitblanc N.m 1 7, ,23 Les résultats recoupent avec les données constructeur (masse théorique de la bille 2150 kg)
64 Essais sur chandelles Utilisation du montage de bridage pour désolidariser la bille avant du compacteur du sol FX4 = FX7 = FY 4 = FY 7 = CZ 4 = CZ 7 = 0 Excitation de la bille en rotation avec les moteurs de translation et/ou en vibration avec la mise en route du système de vibration
65 Résultats des essais sur chandelles x 0 = Mb V 3 cos(q 3) V y 3 sin(q 3) + C1 42 q 1 + K 1 42 q 1 (8) (ω x 3 + q 5) 2 cos(q 3 + q 5 )MX (ω x 3 + q 5) 2 sin(q 3 + q 5 )MY 5 42 x 0 = Mb V 3 sin(q 3) + V y 3 cos(q 3) + C2 42 q 2 + K 2 42 q 2 (9) (ω x 3 + q 5) 2 sin(q 3 + q 5 )MX5 42 (ω x 3 + q 5) 2 cos(q 3 + q 5 )MY 5 42 Paramètres Unités ˆX σ ˆX σ ˆX r (%) C1 42 N.m 1.s K 1 42 N.m C2 42 N.m 1.s K 2 42 N.m MX5 42 m.kg MY 5 42 m.kg σ rho = cond(w ) = cond(w diag(x)) = 29 Paramètre du modèle dynamique pour la grande amplitude (42 Hz)
66 Validation des essais sur chandelles Comparaison entre la force mesurée et la force calculée pour le modèle à 42 Hz
67 Résultats des essais sur chandelles x 0 = Mb V 3 cos(q 3) V y 3 sin(q 3) + C1 50 q 1 + K 1 50 q 1 (10) (ω x 3 + q 5) 2 cos(q 3 + q 5 )MX (ω x 3 + q 5) 2 sin(q 3 + q 5 )MY 5 50 x 0 = Mb V 3 sin(q 3) + V y 3 cos(q 3) + C2 50 q 2 + K 2 50 q 2 (11) (ω x 3 + q 5) 2 sin(q 3 + q 5 )MX5 50 (ω x 3 + q 5) 2 cos(q 3 + q 5 )MY 5 50 Paramètres Unités ˆX σ ˆX σ ˆX r (%) C1 50 N.m 1.s K 1 50 N.m C2 50 N.m 1.s K 2 50 N.m MX5 50 m.kg MY 5 50 m.kg σ rho = cond(w ) = cond(w diag(x)) = 9.7 Paramètre du modèle dynamique pour la petite amplitude (50 Hz)
68 Validation des essais sur chandelles Comparaison entre la force mesurée et la force calculée pour le modèle à 50 Hz
69 Introduction Présentation du compacteur Existant Modélisation du compacteur Modélisation DHM complète Modélisation DHM d une bille Identification Validation de la méthode sur chantier Conclusion
70 Objectifs Vérifier la faisabilité de la mesure sur un chantier Acquisition de données sur toute la durée du chantier Calcul de la réaction du sol et du couple résistant pour chaque passe Analyse des résultats en fonction du déroulement du chantier
71 Compacteur instrumenté sur le chantier
72 Schéma du carrefour CSA feux rouges Longueur : 140m Largeur : 7m matériau : BBSG 0/10 à 6% de bitume
73 Analyse des résultats Globalement : Le couple resistant diminue avec le nombre de passes L effort normal et l effort tangentiel augmente avec le nombre de passes Localement : L effort normal augmente si la rigidité du support augmente Le couple résistant augmente si la température du matériau augmente
74 Réaction du sol sur support rigide
75 Couple résistant sur un matériau de température variable
76 Introduction Présentation du compacteur Existant Modélisation du compacteur Modélisation DHM complète Modélisation DHM d une bille Identification Validation de la méthode sur chantier Conclusion
77 Conclusion
78 Conclusion Modélisation DHM complète (translation + vibration) des compacteurs
79 Conclusion Modélisation DHM complète (translation + vibration) des compacteurs Pour estimer des efforts de contact, il faut modéliser au plus proche du contact
80 Conclusion Modélisation DHM complète (translation + vibration) des compacteurs Pour estimer des efforts de contact, il faut modéliser au plus proche du contact Une instrumentation poussée de la partie modélisée est nécessaire
81 Conclusion Modélisation DHM complète (translation + vibration) des compacteurs Pour estimer des efforts de contact, il faut modéliser au plus proche du contact Une instrumentation poussée de la partie modélisée est nécessaire Possibilité de mesurer les efforts de contact sur un chantier
82 Mesure des efforts d un compacteur en vibration Intervenant : Pierre-Olivier Vandanjon Date : 20 février 2005
Machines. Plaques vibrantes 365 712 kg entièrement hydrauliques AVH 5020 / 6020 / 7010. www.ammann-group.com
 Machines Plaques vibrantes 365 712 kg entièrement hydrauliques AVH 5020 / 6020 / 7010 www.ammann-group.com Nous préparons le sol au mieux Une puissance de compactage convaincante Compactage optimal, conduite
Machines Plaques vibrantes 365 712 kg entièrement hydrauliques AVH 5020 / 6020 / 7010 www.ammann-group.com Nous préparons le sol au mieux Une puissance de compactage convaincante Compactage optimal, conduite
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
D022751/01 TEXTE SOUMIS EN APPLICATION DE L ARTICLE 88-4 DE LA CONSTITUTION PAR LE GOUVERNEMENT, À L ASSEMBLÉE NATIONALE ET AU SÉNAT.
 D022751/01 ASSEMBLÉE NATIONALE QUATORZIÈME LÉGISLATURE SÉNAT SESSION ORDINAIRE DE 2012-2013 Reçu à la Présidence de l Assemblée nationale le 3 octobre 2012 Enregistré à la Présidence du Sénat le 3 octobre
D022751/01 ASSEMBLÉE NATIONALE QUATORZIÈME LÉGISLATURE SÉNAT SESSION ORDINAIRE DE 2012-2013 Reçu à la Présidence de l Assemblée nationale le 3 octobre 2012 Enregistré à la Présidence du Sénat le 3 octobre
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
supports métalliques basse fréquence gamme "Polycal-Ressort" standard définition R P 3 5-4 1
 supports métalliques basse fréquence définition E V K J L D e Ød (x2) U G R M Ho série RP3 Isolateurs de vibrations basses fréquences à chargement vertical entièrement métallique. Endurance et fiabilité
supports métalliques basse fréquence définition E V K J L D e Ød (x2) U G R M Ho série RP3 Isolateurs de vibrations basses fréquences à chargement vertical entièrement métallique. Endurance et fiabilité
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
P M L R O G W. sylomer. Gamme de Sylomer Standard. Propriétés Méthode de test Commentaires. Polyuréthane (PUR) Cellulaire mixte
 Cellulaire mixte") Matière : Couleur : Polyuréthane (PUR) Cellulaire mixte Gris Recommandations d usage : Pression (dépend du facteur de forme) Déflexion Pression statique maximum :. N/mm ~ % Pression dyn. maximum :. N/mm
Matière : Couleur : Polyuréthane (PUR) Cellulaire mixte Gris Recommandations d usage : Pression (dépend du facteur de forme) Déflexion Pression statique maximum :. N/mm ~ % Pression dyn. maximum :. N/mm
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Machines. Plaques vibrantes réversibles 100 475 kg APR 2220 / 2620 / 3020 / 3520 / 4920 / 5920. www.ammann-group.com
 Machines Plaques vibrantes réversibles 100 475 kg APR 2220 / 2620 / 3020 / 3520 / 4920 / 5920 www.ammann-group.com Les compacteurs Les plaques vibrantes pour l utilisation universelle Machine universelle
Machines Plaques vibrantes réversibles 100 475 kg APR 2220 / 2620 / 3020 / 3520 / 4920 / 5920 www.ammann-group.com Les compacteurs Les plaques vibrantes pour l utilisation universelle Machine universelle
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P
 SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P Fabrication de grandes séries avec une efficacité accrue Augmentez la qualité de vos pièces de précision, réduisez vos coûts unitaires et fabriquez
SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P Fabrication de grandes séries avec une efficacité accrue Augmentez la qualité de vos pièces de précision, réduisez vos coûts unitaires et fabriquez
Annexe A. Annexe A. Tableaux et données relatifs à la vérification par Eurocode 3 A.3
 Annexes Annexe A : Tableaux et données relatifs à la vérification par Eurocode 3... A.2 Annexe B : Format des fichiers générés et utilisés par CADBEL... A.11 Annexe C : Calcul de la résistance au flambement
Annexes Annexe A : Tableaux et données relatifs à la vérification par Eurocode 3... A.2 Annexe B : Format des fichiers générés et utilisés par CADBEL... A.11 Annexe C : Calcul de la résistance au flambement
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
La presse plieuse de référence
 La presse plieuse de référence Plus de 125 000 presses plieuses et 1500 cellules de pliage installées! Hormis AMADA, quel constructeur peut se prévaloir d un tel bilan? Les raisons de ce succès sont simples
La presse plieuse de référence Plus de 125 000 presses plieuses et 1500 cellules de pliage installées! Hormis AMADA, quel constructeur peut se prévaloir d un tel bilan? Les raisons de ce succès sont simples
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
Exemples de dynamique sur base modale
 Dynamique sur base modale 1 Exemples de dynamique sur base modale L. CHAMPANEY et Ph. TROMPETTE Objectifs : Dynamique sur base modale réduite, Comparaison avec solution de référence, Influence des modes
Dynamique sur base modale 1 Exemples de dynamique sur base modale L. CHAMPANEY et Ph. TROMPETTE Objectifs : Dynamique sur base modale réduite, Comparaison avec solution de référence, Influence des modes
«La solution» DESCRIPTION TECHNIQUE
 «La solution» DESCRIPTION TECHNIQUE P2-f & P4-f - 185/180 - Standard P2-f & P4-f - 170/165 - Compact P2-f & P4-f - 200/195 - Confort MODELE H DH P2f-4f - 185/180 - Standard 340 171 P2f-4f - 170/165 - Compact
«La solution» DESCRIPTION TECHNIQUE P2-f & P4-f - 185/180 - Standard P2-f & P4-f - 170/165 - Compact P2-f & P4-f - 200/195 - Confort MODELE H DH P2f-4f - 185/180 - Standard 340 171 P2f-4f - 170/165 - Compact
SOCIETE NATIONALE DES CHEMINS DE FER BELGES SPECIFICATION TECHNIQUE
 SOCIETE NATIONALE DES CHEMINS DE FER BELGES SPECIFICATION TECHNIQUE L - 72 FOURNITURE DE SEMELLES ELASTIQUES POUR LA FIXATION DE VOIE "TYPE BOTZELAER" EDITION: 04/2001 Index 1. INTRODUCTION... 3 1.1. DOMAINE
SOCIETE NATIONALE DES CHEMINS DE FER BELGES SPECIFICATION TECHNIQUE L - 72 FOURNITURE DE SEMELLES ELASTIQUES POUR LA FIXATION DE VOIE "TYPE BOTZELAER" EDITION: 04/2001 Index 1. INTRODUCTION... 3 1.1. DOMAINE
SÉRIES SM Cribles CRIBLES À TROMMELS SM 414 SM 414 K SM 518 SM 620 SM 620 K SM 720 CRIBLE À ÉTOILES SM 1200 WE CARE
 SÉRIES SM Cribles CRIBLES À TROMMELS SM 414 SM 414 K SM 518 SM 620 SM 620 K SM 720 CRIBLE À ÉTOILES SM 1200 WE CARE CRIBLES SÉRIE SM CRIBLES À TROMMELS POUR UN CRIBLAGE OPTIMAL CRIBLES À TROMMELS Le trommel
SÉRIES SM Cribles CRIBLES À TROMMELS SM 414 SM 414 K SM 518 SM 620 SM 620 K SM 720 CRIBLE À ÉTOILES SM 1200 WE CARE CRIBLES SÉRIE SM CRIBLES À TROMMELS POUR UN CRIBLAGE OPTIMAL CRIBLES À TROMMELS Le trommel
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Glissière linéaire à rouleaux
 LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
Essais de charge sur plaque
 Page No.: 1 L essai de charge sur plaque est exécuté entre autres dans des galeries d exploration ou dans des puits, mais il peut aussi être exécuté à la surface en appliquant un poids mort ou en chargeant
Page No.: 1 L essai de charge sur plaque est exécuté entre autres dans des galeries d exploration ou dans des puits, mais il peut aussi être exécuté à la surface en appliquant un poids mort ou en chargeant
Presse Plieuse Synchronisée. Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE. Gamme PSN
 Presse Plieuse Synchronisée Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE Gamme PSN PRESENTATION Cet équipement est une presse plieuse hydraulique à commande numérique. La commande numérique est de
Presse Plieuse Synchronisée Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE Gamme PSN PRESENTATION Cet équipement est une presse plieuse hydraulique à commande numérique. La commande numérique est de
Rupture et plasticité
 Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Rupture et plasticité Département de Mécanique, Ecole Polytechnique, 2009 2010 Département de Mécanique, Ecole Polytechnique, 2009 2010 25 novembre 2009 1 / 44 Rupture et plasticité : plan du cours Comportements
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Plaques vibrantes. Modèles unidirectionnels ou reversibles. www.multiquip.com
 Plaques vibrantes Modèles unidirectionnels ou reversibles www.multiquip.com Plaques vibrantes unidirectionnelles Les compacteurs Mikasa de Multiquip sont reconnus comme étant la norme de l'industrie de
Plaques vibrantes Modèles unidirectionnels ou reversibles www.multiquip.com Plaques vibrantes unidirectionnelles Les compacteurs Mikasa de Multiquip sont reconnus comme étant la norme de l'industrie de
FAG Detector II le collecteur et l analyseur de données portatif. Information Technique Produit
 FAG II le collecteur et l analyseur de données portatif Information Technique Produit Application La maintenance conditionnelle Principe de fonctionnement Application Le FAG II est, à la fois, un appareil
FAG II le collecteur et l analyseur de données portatif Information Technique Produit Application La maintenance conditionnelle Principe de fonctionnement Application Le FAG II est, à la fois, un appareil
Charge Force Poids. Highly Reliable Systems for Measuring and Monitoring Load, Force and Weight
 Charge Force Poids LOAD-FORCE-WEIGHT Capteurs force-poids Systèmes de mesure et de surveillance Charge-Force- Poids de très grande fiabilité Axes dynamométriques Capteurs sur câble Extensomètres Conditionneurs
Charge Force Poids LOAD-FORCE-WEIGHT Capteurs force-poids Systèmes de mesure et de surveillance Charge-Force- Poids de très grande fiabilité Axes dynamométriques Capteurs sur câble Extensomètres Conditionneurs
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Boîtiers en matière isolante KO 4722 avec bornes plates pour technique d'enfichage
 Boîtiers en matière isolante KO 4722 avec bornes plates pour technique d'enfichage Caractéristiques techniques Références de commande: KO 4722.118.42.01.001 KO 4722.138.84.02.001 Largeur 200 mm Au choix
Boîtiers en matière isolante KO 4722 avec bornes plates pour technique d'enfichage Caractéristiques techniques Références de commande: KO 4722.118.42.01.001 KO 4722.138.84.02.001 Largeur 200 mm Au choix
RELAIS STATIQUE. Tension commutée
 RELAIS STATIQUE Nouveau Relais Statique Monophasé de forme compacte et économique Coût réduit pour une construction modulaire Modèles disponibles de 15 à 45 A Modèles de faible encombrement, avec une épaisseur
RELAIS STATIQUE Nouveau Relais Statique Monophasé de forme compacte et économique Coût réduit pour une construction modulaire Modèles disponibles de 15 à 45 A Modèles de faible encombrement, avec une épaisseur
FAG Detector III la solution pour la surveillance et l équilibrage. Information Technique Produit
 FAG Detector III la solution pour la surveillance et l équilibrage Information Technique Produit Principe Utilisation Hautes performances utilisation simple Le FAG Detector III est, à la fois, un appareil
FAG Detector III la solution pour la surveillance et l équilibrage Information Technique Produit Principe Utilisation Hautes performances utilisation simple Le FAG Detector III est, à la fois, un appareil
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N
 Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Roulements à une rangée de billes de génération C. Information Technique Produit
 Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Les coûts en ligne de compte
 Bac pro EDPI Les coûts en ligne de compte Stéphane Gaston [1] L étude des coûts de fabrication est souvent délaissée, même en lycée professionnel. Elle demande pourtant méthode et rigueur. Voici donc une
Bac pro EDPI Les coûts en ligne de compte Stéphane Gaston [1] L étude des coûts de fabrication est souvent délaissée, même en lycée professionnel. Elle demande pourtant méthode et rigueur. Voici donc une
Chapitre 5. Le ressort. F ext. F ressort
 Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
SSLS116 - Chargement membranaire d une plaque excentrée
 Titre : SSLS116 - Excentrement de plaque. Chargement membr[...] Date : 11/03/2010 Page : 1/12 Manuel de Validation Fascicule V3.03 : Statique linéaire des plaques et coques Document : V3.03.116 SSLS116
Titre : SSLS116 - Excentrement de plaque. Chargement membr[...] Date : 11/03/2010 Page : 1/12 Manuel de Validation Fascicule V3.03 : Statique linéaire des plaques et coques Document : V3.03.116 SSLS116
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
MODE D EMPLOI Boitier de programmation SKY300046-01
 MODE D EMPLOI Boitier de programmation SKY300046-01 INTRODUCTION Merci d avoir fait l acquisition du Boitier de programmation SkyRc (SKY300046-01). Veuillez lire complètement et attentivement ce manuel
MODE D EMPLOI Boitier de programmation SKY300046-01 INTRODUCTION Merci d avoir fait l acquisition du Boitier de programmation SkyRc (SKY300046-01). Veuillez lire complètement et attentivement ce manuel
Infos. Indicateurs analogiques encastrables pour installation à courants forts. Série M W/P/ LSP BWQ BGQ TP TG WQ /0S WQ /2S FQ /2 W BI BIW DFQ
 Infos Série M 200.U.003.05 encastrables pour installation à courants forts Série M W/P/ LSP pour montage sur rail normé BWQ BGQ TP TG WQ /0S WQ /2S FQ /2 W BI BIW SY Compteurs horaires Voltmètres partiels
Infos Série M 200.U.003.05 encastrables pour installation à courants forts Série M W/P/ LSP pour montage sur rail normé BWQ BGQ TP TG WQ /0S WQ /2S FQ /2 W BI BIW SY Compteurs horaires Voltmètres partiels
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Neu. Technique d installation / de surveillance. VARIMETER RCM Contrôleur différentiel type B IP 5883
 Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite
 Titre : SDLS08 - Modes propres d'une plaque carrée calculé[...] Date : 03/08/2011 Page : 1/6 SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite Résumé : Ce cas test a pour objectif de
Titre : SDLS08 - Modes propres d'une plaque carrée calculé[...] Date : 03/08/2011 Page : 1/6 SDLS08 - Modes propres d'une plaque carrée calculés sur base réduite Résumé : Ce cas test a pour objectif de
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
BAIES RESEAUX 19" SÉRIE OPTIMAL ::ROF
 BAIES RESEAUX 19" SÉRIE OPTIMAL ::ROF es baies de répartition data et de télécommunication peuvent loger tous vos équipements tel que panneaux de brassage, composants actifs, serveurs... etc. 4 Description:
BAIES RESEAUX 19" SÉRIE OPTIMAL ::ROF es baies de répartition data et de télécommunication peuvent loger tous vos équipements tel que panneaux de brassage, composants actifs, serveurs... etc. 4 Description:
Baccalauréat Professionnel. Microtechniques. Session 2012 DOSSIER TECHNIQUE (DT)
") Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
- Motorisation électrique (vérins) permettant d ajuster la hauteur du plan de travail.
 permettant d ajuster la hauteur du plan de travail.") Publié sur Ergotechnik (http://www.ergotechnik.com) SLIMLIFT 6230 DESCRIPTION - Disponible en version droite uniquement. - Motorisation électrique (vérins) permettant d ajuster la hauteur du plan de travail.
Publié sur Ergotechnik (http://www.ergotechnik.com) SLIMLIFT 6230 DESCRIPTION - Disponible en version droite uniquement. - Motorisation électrique (vérins) permettant d ajuster la hauteur du plan de travail.
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
TP2 ACTIVITE ITEC. Centre d intérêt : AUBE D UN MIRAGE 2000 COMPORTEMENT D UNE PIECE. Documents : Sujet Projet Dossier technique - Document réponse.
 ACTIVITE ITEC TP2 Durée : 2H Centre d intérêt : COMPORTEMENT D UNE PIECE AUBE D UN MIRAGE 2000 BA133 COMPETENCES TERMINALES ATTENDUES NIVEAU D ACQUISITION 1 2 3 * * Rendre compte de son travail par écrit.
ACTIVITE ITEC TP2 Durée : 2H Centre d intérêt : COMPORTEMENT D UNE PIECE AUBE D UN MIRAGE 2000 BA133 COMPETENCES TERMINALES ATTENDUES NIVEAU D ACQUISITION 1 2 3 * * Rendre compte de son travail par écrit.
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Gamme des produits. www.boecker-group.com
 Gamme des produits www.boecker-group.com Viser haut en toute sécurité Treuil de chantier Baby Le petit assistant de chantier. Indispensable dans toute caisse à outils. Pour le levage de charges de tous
Gamme des produits www.boecker-group.com Viser haut en toute sécurité Treuil de chantier Baby Le petit assistant de chantier. Indispensable dans toute caisse à outils. Pour le levage de charges de tous
DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE
 DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE P2-F et P4-F 185 (Modèle standard) P2-F et P4-F 170 MODELE P2/4-F 170 P2/4-F 185 (Standard) P2/4-F 195 P2-F et P4-F 195 H 325 340 350 DH 156 171 181
DOUBLE PARK ECO «La solution» DESCRIPTION TECHNIQUE P2-F et P4-F 185 (Modèle standard) P2-F et P4-F 170 MODELE P2/4-F 170 P2/4-F 185 (Standard) P2/4-F 195 P2-F et P4-F 195 H 325 340 350 DH 156 171 181
Système de bridage rapide main-robot «QL»
 ELEMENTS DE PREHENSION 4 170 Principe général valable pour tous les modèles Élément femelle côté préhenseur Pour permettre le changement rapide des systèmes de préhension, les systèmes de bridages rapides
ELEMENTS DE PREHENSION 4 170 Principe général valable pour tous les modèles Élément femelle côté préhenseur Pour permettre le changement rapide des systèmes de préhension, les systèmes de bridages rapides
Informations techniques
 Informations techniques Force développée par un vérin Ø du cylindre (mm) Ø de la tige (mm) 12 6 16 6 20 8 25 10 32 12 40 16 50 20 63 20 80 25 100 25 125 32 160 40 200 40 250 50 320 63 ction Surface utile
Informations techniques Force développée par un vérin Ø du cylindre (mm) Ø de la tige (mm) 12 6 16 6 20 8 25 10 32 12 40 16 50 20 63 20 80 25 100 25 125 32 160 40 200 40 250 50 320 63 ction Surface utile
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Monitoring et suivi du comportement des chaussées
 Monitoring et suivi du comportement des chaussées Pierre Hornych Juliette Blanc IFSTTAR - LAMES 1/xx MONITORING ET SUIVI DU COMPORTEMENT DES CHAUSSÉES DÉVELOPPEMENTS RÉCENTS ET PERSPECTIVES Introduction
Monitoring et suivi du comportement des chaussées Pierre Hornych Juliette Blanc IFSTTAR - LAMES 1/xx MONITORING ET SUIVI DU COMPORTEMENT DES CHAUSSÉES DÉVELOPPEMENTS RÉCENTS ET PERSPECTIVES Introduction
Indice LEVAGE MANUTENTION
 portada (FOTO) Indice 1 LEVAGE 2 MANUTENTION LEVAGE foto de levage 1 1.A. SCHEMA DE MONTAGE 1. Vérin GROB 4. Accouplements élastiques 2. Renvoi d angle 5. Paliers pour arbre de liaison 3. Arbres de liaison
portada (FOTO) Indice 1 LEVAGE 2 MANUTENTION LEVAGE foto de levage 1 1.A. SCHEMA DE MONTAGE 1. Vérin GROB 4. Accouplements élastiques 2. Renvoi d angle 5. Paliers pour arbre de liaison 3. Arbres de liaison
Notice de montage de la sellette 150SP
 S O M M A I R E Informations sur la sécurité... 2 1.1 Fonctionnement... 2 1.2 Installation... 2 1.3 Entretien... 2 Usage correct... 3 2.1 Application... 3 2.2 Conception... 3 2.3 Garantie... 4 Fonctionnement...
S O M M A I R E Informations sur la sécurité... 2 1.1 Fonctionnement... 2 1.2 Installation... 2 1.3 Entretien... 2 Usage correct... 3 2.1 Application... 3 2.2 Conception... 3 2.3 Garantie... 4 Fonctionnement...
Adjonction de side-car non conformément à un agrément de prototype national français
 version du 20.06.2011 Fiche de constitution d un dossier de Réception à Titre Isolé de véhicule en application du Code de la Route RTI02.9 Adjonction de side-car non conformément à un agrément de prototype
version du 20.06.2011 Fiche de constitution d un dossier de Réception à Titre Isolé de véhicule en application du Code de la Route RTI02.9 Adjonction de side-car non conformément à un agrément de prototype
INFLUENCE de la TEMPERATURE. Transition ductile/fragile Choc Thermique Fluage
 INFLUENCE de la TEMPERATURE Transition ductile/fragile Choc Thermique Fluage Transition ductile/fragile Henry Bessemer (UK)! 1856 : production d'acier à grande échelle Pont des Trois-Rivières 31 janvier
INFLUENCE de la TEMPERATURE Transition ductile/fragile Choc Thermique Fluage Transition ductile/fragile Henry Bessemer (UK)! 1856 : production d'acier à grande échelle Pont des Trois-Rivières 31 janvier
ALFABLOC LA SOLUTION POUR LE STOCKAGE EN VRAC ÉLÉMENTS MOBILES DE STOCKAGE EN BÉTON ARMÉ. ALFABLOC murs autoporteurs
 ALFABLOC murs autoporteurs ALFABLOC a passé avec succès le test anti-feu d une durée de 6 heures selon la norme NF EN 1363-1. ALFABLOC LA SOLUTION POUR LE STOCKAGE EN VRAC ÉLÉMENTS MOBILES DE STOCKAGE
ALFABLOC murs autoporteurs ALFABLOC a passé avec succès le test anti-feu d une durée de 6 heures selon la norme NF EN 1363-1. ALFABLOC LA SOLUTION POUR LE STOCKAGE EN VRAC ÉLÉMENTS MOBILES DE STOCKAGE
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Electroserrures à larder 282, 00
 Serrures électriques Serrure électrique à mortaiser Serrure à verrouillage automatique contrôlée en entrée. Une serrure à béquille contrôlée est une serrure dotée d un dispositif électromécanique interne
Serrures électriques Serrure électrique à mortaiser Serrure à verrouillage automatique contrôlée en entrée. Une serrure à béquille contrôlée est une serrure dotée d un dispositif électromécanique interne
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
CHARGEUSES COMPACTES À PNEU
 V270 V330 CHARGEUSES COMPACTES À PNEU À LEVAGE VERTICAL En 1859, une société spécialisée dans les équipements agricoles, basée dans une forge, était créée à West Bend, dans le Wisconsin. Après de timides
V270 V330 CHARGEUSES COMPACTES À PNEU À LEVAGE VERTICAL En 1859, une société spécialisée dans les équipements agricoles, basée dans une forge, était créée à West Bend, dans le Wisconsin. Après de timides
Compte rendu de LA37 B, TP numéro 1. Evolution de la température et du degrée d'hydratation
 4 6 8 2 4 8 22 26 3 34 38 42 46 5 54 58 62 66 7 74 78 83 89 96 8 44 Bertin Morgan Compte rendu de LA37 B, TP numéro. Les essais effectués par le laboratoire des ponts et chaussés nous ont fournis la température
4 6 8 2 4 8 22 26 3 34 38 42 46 5 54 58 62 66 7 74 78 83 89 96 8 44 Bertin Morgan Compte rendu de LA37 B, TP numéro. Les essais effectués par le laboratoire des ponts et chaussés nous ont fournis la température
CLEANassist Emballage
 Emballage Dans la zone d emballage, il est important de vérifier exactement l état et la fonctionnalité des instruments, car ce sont les conditions fondamentales pour la réussite d une opération. Il est
Emballage Dans la zone d emballage, il est important de vérifier exactement l état et la fonctionnalité des instruments, car ce sont les conditions fondamentales pour la réussite d une opération. Il est
Entraînements personnalisés
 67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS. A déplacement manuel : Power Tower et Nano. Automotrices. Nano SP
 AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS A déplacement manuel : Power Tower et Nano Automotrices Nano SP LE GUIDE DE L ÉLÉVATION À FAIBLE HAUTEUR Qu est ce que le low level access ( l élévation
AGENT EXCLUSIF AU MAROC NACELLES FAIBLES HAUTEURS A déplacement manuel : Power Tower et Nano Automotrices Nano SP LE GUIDE DE L ÉLÉVATION À FAIBLE HAUTEUR Qu est ce que le low level access ( l élévation
NOUVEAU. Les plus puissants chariots télescopiques Kramer jamais conçus. Chariots Télescopiques
 407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
Calculs Computional fluide dynamiques (CFD) des serres à membrane de Van der Heide
 des serres à membrane de Van der Heide") Calculs Computional fluide dynamiques (CFD) des serres à membrane de Van der Heide J.B. Campen Wageningen UR Glastuinbouw, Wageningen xxx 2007 Rapport xxx 2007 Wageningen, Wageningen UR Glastuinbouw Tous
Calculs Computional fluide dynamiques (CFD) des serres à membrane de Van der Heide J.B. Campen Wageningen UR Glastuinbouw, Wageningen xxx 2007 Rapport xxx 2007 Wageningen, Wageningen UR Glastuinbouw Tous
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
CONCEPTION PARASISMIQUE DES BATIMENTS (STRUCTURES) INTRODUCTION A LA DYNAMIQUE DES STRUCTURES
 INTRODUCTION A LA DYNAMIQUE DES STRUCTURES") COURS DE CONSTRUCTION PARASISMIQUE VOLUME 2 CONCEPTION PARASISMIQUE DES BATIMENTS (STRUCTURES) INTRODUCTION A LA DYNAMIQUE DES STRUCTURES Introduction à la conception PS des structures - Approche qualitative
COURS DE CONSTRUCTION PARASISMIQUE VOLUME 2 CONCEPTION PARASISMIQUE DES BATIMENTS (STRUCTURES) INTRODUCTION A LA DYNAMIQUE DES STRUCTURES Introduction à la conception PS des structures - Approche qualitative