Vision par ordinateur
|
|
|
- Alexandre Gauvin
- il y a 8 ans
- Total affichages :
Transcription
1 Vision par ordinateur Introduction au domaine Applications Frédéric Devernay

2 Qu'est-ce que la vision? Le monde a une structure 3D et est composé d'objets L'être humain sait parfaitement décrire et interpréter ce monde Pourtant, l'information disponible sur la rétine n'est qu'un ensemble de points (environ un million de picture elements ou pixels)...

3 Qu'est-ce que la vision (2) Chaque pixel contient des informations sur la lumière (quantité et contenu spectral/couleur) reçue en ce point de la rétine Les objets (téléphone, voiture ) n'existent pas sur la rétine, et pourtant on les voit : leur interprétation est le résultat du processus visuel.

4 Qu'est-ce que la vision (3) Image (ensemble de pixels) Information sensorielle Interprétation Connaissances a priori (forme, couleur, comportement physique) Système de vision Description de la scène (objets, position, mouvement)

5 Résoudre le problème de la vision? La vision humaine est extrêmement complexe (neurosciences) La vision par ordinateur ne cherche pas à comprendre ou à reproduire la vision humaine, mais à construire un modèle algorithmique qui, vu de l'extérieur, possède des propriétés semblables. De plus, un problème de vision par ordinateur correspond souvent à un sous-ensemble du système de vision humain.

6 Une théorie de la vision Image (ensemble de pixels) Information sensorielle Interprétation Connaissances a priori (forme, couleur, comportement physique) Système de vision Description de la scène (objets, position, mouvement)

7 Images Une théorie de la vision Connaissances Niveau de description Stratégies descendantes Stratégies ascendantes Interprétation Représentation compatible avec représentation extraite des images Mise en Description correspondance Représentation abstraite (contours 2D, primitives 3D, )

8 Une théorie de la vision Connaissances a priori Physiques (optique, forces/interactions) Géométriques (forme des objets, formation de l'image) Sémantiques (fonction des objets, comportement) Exemple : que sait-on de mesurable sur une voiture qui permette de l'identifier dans une image?

9 Une théorie de la vision Les algorithmes de vision sont des expressions des stratégies mises en œuvre : extraction de primitives à partir des images représentation des connaissances mise en correspondance images/connaissances : reconnaissance Un système de vision doit être fiable et rapide

10 Le paradigme de David Marr Image 1 Image 2... Image n Extraction primitives 2D Première ébauche (primal sketch) Ébauche 2,5D Représentation centrée sur l'observateur (le monde 3D vu depuis la caméra) - Stéréoscopie - Analyse du mouvement - Ombrages, textures...
 - Stéréoscopie - Analyse du")
11 Le paradigme de David Marr Connaissances 3D Ébauche 2,5D Représentation centrée sur la scène - Objets - Relations entre objets La description ne dépend plus de l'observateur Paradigme datant de la fin des années 1970, mais toujours d'actualité!

12 Segmentation, reconstruction, reconnaissance Traduction en algorithmes des étapes de Marr Tout part des images : optiques (2D) : photo, satellite, document médicales (Rayons X, IRM, 2D/3D ) autres (radar, laser, sonar ) images fixes ou séquences temporelles
 autres (radar, laser, sonar ) images fixes ou séquences")
13 Segmentation Détection de points d'intérêt (coins ) Détection de contours correspondent à des discontinuités des niveaux de gris approximation par des représentations analytiques (polygones, coniques ) Extraction de régions (zones homogènes) Les approches "contours" et "régions" sont duales : frontières de régions contours
 Les approches \"contours\" et \"régions\" sont duales : frontières de")
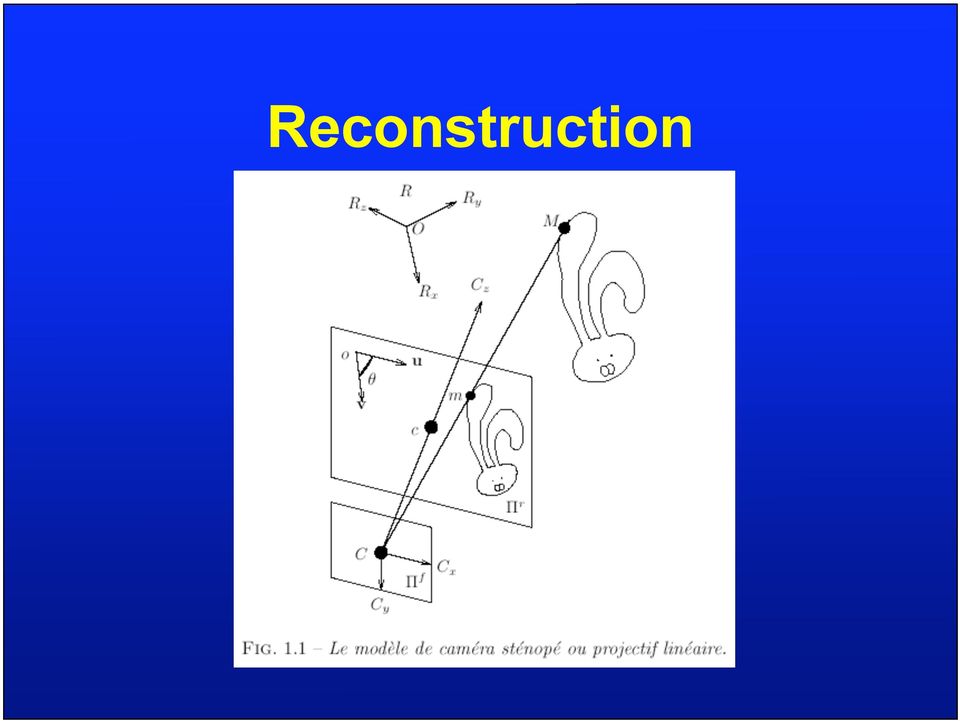
14 Reconstruction Commence par le calibrage de l'imageur détermination de la fonction : point 3D & caractéristiques physiques point image & intensité/couleur revient à déterminer les paramètres d'un modèle de caméra/capteur (position, orientation, focale )

15 Reconstruction
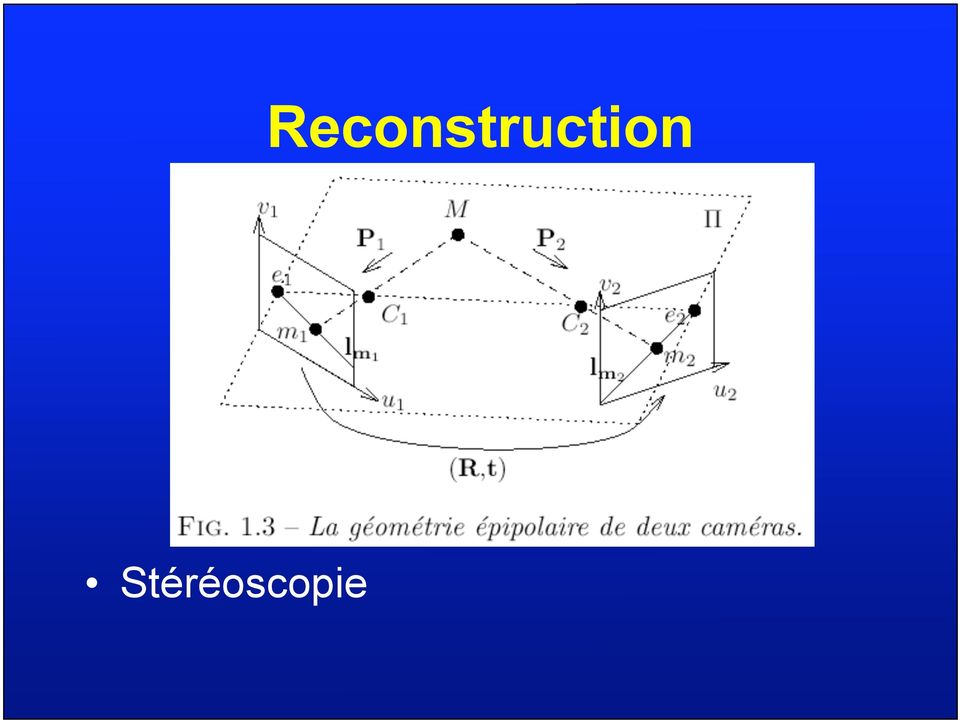
16 Reconstruction Des méthodes variées (shape from ) : Stéréoscopie procède par appariement de primitives, puis triangulation Mouvement (structure from motion) on ne peut pas forcément déduire la structure 3D de la scène d'un mouvement de caméra (un panoramique ne contient pas d'infos 3D) Ombrage (shape from shading) seulement sur objets uniformes et/ou avec éclairage contrôlé
 Ombrage (shape from shading) seulement sur objets uniformes et/ou avec éclairage")
17 Stéréoscopie Reconstruction
18 Quelques exemples concrets Reconnaissance d'écriture (OCR) Contrôle visuel sur chaîne de fabrication Asservissement visuel de robots une caméra observe l'évolution du robot et le renseigne sur sa position par rapport à la cible

19 Quelques exemples Robotique mobile concrets évitement d'obstacles découverte d'un environnement inconnu et construction d'une carte (exploration) conduite automatique / assistée Exemples : mission Mars Pathfinder conduite "sans les mains" (A. Broggi, U Parma)

20 Quelques exemples concrets Modélisation à partir d'images Rendu à partir d'images Post-production cinématographique (objets virtuels dans scènes réelles et vice-versa) PhotoModeller Résultats de Marc Pollefeys système EyeVision au Superbowl'01 (CMU) Panoramas, mosaïques d'images
 Panoramas,")
L analyse d images regroupe plusieurs disciplines que l on classe en deux catégories :
 La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
La vision nous permet de percevoir et d interpreter le monde qui nous entoure. La vision artificielle a pour but de reproduire certaines fonctionnalités de la vision humaine au travers de l analyse d images.
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Intelligence Artificielle et Systèmes Multi-Agents. Badr Benmammar bbm@badr-benmammar.com
 Intelligence Artificielle et Systèmes Multi-Agents Badr Benmammar bbm@badr-benmammar.com Plan La première partie : L intelligence artificielle (IA) Définition de l intelligence artificielle (IA) Domaines
Intelligence Artificielle et Systèmes Multi-Agents Badr Benmammar bbm@badr-benmammar.com Plan La première partie : L intelligence artificielle (IA) Définition de l intelligence artificielle (IA) Domaines
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Géométrie discrète Chapitre V
 Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel
 Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly alexis.joly@inria.fr INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Recherche d'images par le contenu Application au monitoring Télévisuel à l'institut national de l'audiovisuel Alexis Joly alexis.joly@inria.fr INRIA - IMEDIA Alexis Joly cours monitoring p. 1 Plan de l'exposé
Hiver 2013 IMN 259. Introduction à l analyse d images. Par Pierre-Marc Jodoin
 Hiver 2013 Analyse d images IMN 259 Introduction à l analyse d images Par Pierre-Marc Jodoin Où se situe l analyse d images? Traitement d images Imagerie Image Analyse d images/ Vision par ordinateur Infographie
Hiver 2013 Analyse d images IMN 259 Introduction à l analyse d images Par Pierre-Marc Jodoin Où se situe l analyse d images? Traitement d images Imagerie Image Analyse d images/ Vision par ordinateur Infographie
Immersion - Vision 3D dans la RV.
 Cours RVS Master II IVA Immersion - Vision 3D dans la RV. Cours de Réalité Virtuelle et Simulation Master II - IVA A. Mebarki - Maître de Conférences Département d'informatique Faculté des Mathématiques
Cours RVS Master II IVA Immersion - Vision 3D dans la RV. Cours de Réalité Virtuelle et Simulation Master II - IVA A. Mebarki - Maître de Conférences Département d'informatique Faculté des Mathématiques
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE
 AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
La visio-conférence holographique : Pourquoi? Comment?
 La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
Supports. Images numériques. notions de base [1] http://lilapuce.net
![Supports. Images numériques. notions de base [1] http://lilapuce.net](/thumbs/22/1751725.jpg "Supports. Images numériques. notions de base [1] http://lilapuce.net") Supports Images numériques notions de base [1] http://lilapuce.net Deux grands types d images numériques : bitmap et vectoriel La création d'une image informatique n'est possible qu'en utilisant l'un des
Supports Images numériques notions de base [1] http://lilapuce.net Deux grands types d images numériques : bitmap et vectoriel La création d'une image informatique n'est possible qu'en utilisant l'un des
Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS
 Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Voir le monde à travers un capteur de profondeur
 Voir le monde à travers un capteur de profondeur Copyright 2014 pabr@pabr.org Tous droits réservés. (All rights reserved.) Dans ce projet nous installons une caméra à capteur de profondeur sur un casque
Voir le monde à travers un capteur de profondeur Copyright 2014 pabr@pabr.org Tous droits réservés. (All rights reserved.) Dans ce projet nous installons une caméra à capteur de profondeur sur un casque
TP SIN Traitement d image
 TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
Une méthode de développement d applications de traitement d images An image processing applications development method
 Une méthode de développement d applications de traitement d images An image processing applications development method Régis Clouard GREYC - IMAGE, 6 boulevard Maréchal Juin, F-14050 Caen cedex, France
Une méthode de développement d applications de traitement d images An image processing applications development method Régis Clouard GREYC - IMAGE, 6 boulevard Maréchal Juin, F-14050 Caen cedex, France
CYCLE 3D. Certification RNCP "Lead Infographiste 2D/3D" Niveau II - Bac +3
 CYCLE 3D Certification RNCP "Lead Infographiste 2D/3D" Niveau II - Bac +3 Objectif : Acquérir des compétences et se former aux métiers créatifs et dans le domaine de l'infographie 3D avec une nouvelle
CYCLE 3D Certification RNCP "Lead Infographiste 2D/3D" Niveau II - Bac +3 Objectif : Acquérir des compétences et se former aux métiers créatifs et dans le domaine de l'infographie 3D avec une nouvelle
PRINCIPE MICROSCOPIE CONFOCALE
 PRINCIPE MICROSCOPIE CONFOCALE Un microscope confocal est un système pour lequel l'illumination et la détection sont limités à un même volume de taille réduite (1). L'image confocale (ou coupe optique)
PRINCIPE MICROSCOPIE CONFOCALE Un microscope confocal est un système pour lequel l'illumination et la détection sont limités à un même volume de taille réduite (1). L'image confocale (ou coupe optique)
basée sur le cours de Bertrand Legal, maître de conférences à l ENSEIRB www.enseirb.fr/~legal Olivier Augereau Formation UML
 basée sur le cours de Bertrand Legal, maître de conférences à l ENSEIRB www.enseirb.fr/~legal Olivier Augereau Formation UML http://olivier-augereau.com Sommaire Introduction I) Les bases II) Les diagrammes
basée sur le cours de Bertrand Legal, maître de conférences à l ENSEIRB www.enseirb.fr/~legal Olivier Augereau Formation UML http://olivier-augereau.com Sommaire Introduction I) Les bases II) Les diagrammes
Université de Bangui. Modélisons en UML
 Université de Bangui CRM Modélisons en UML Ce cours a été possible grâce à l initiative d Apollinaire MOLAYE qui m a contacté pour vous faire bénéficier de mes connaissances en nouvelles technologies et
Université de Bangui CRM Modélisons en UML Ce cours a été possible grâce à l initiative d Apollinaire MOLAYE qui m a contacté pour vous faire bénéficier de mes connaissances en nouvelles technologies et
FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE
 Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Introduction au datamining
 Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Introduction au datamining Patrick Naïm janvier 2005 Définition Définition Historique Mot utilisé au départ par les statisticiens Le mot indiquait une utilisation intensive des données conduisant à des
Traitement numérique de l'image. Raphaël Isdant - 2009
 Traitement numérique de l'image 1/ L'IMAGE NUMÉRIQUE : COMPOSITION ET CARACTÉRISTIQUES 1.1 - Le pixel: Une image numérique est constituée d'un ensemble de points appelés pixels (abréviation de PICture
Traitement numérique de l'image 1/ L'IMAGE NUMÉRIQUE : COMPOSITION ET CARACTÉRISTIQUES 1.1 - Le pixel: Une image numérique est constituée d'un ensemble de points appelés pixels (abréviation de PICture
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
GMEC1311 Dessin d ingénierie. Chapitre 1: Introduction
 GMEC1311 Dessin d ingénierie Chapitre 1: Introduction Contenu du chapitre Introduction au dessin technique Normes Vues Traits Échelle Encadrement 2 Introduction Les dessins ou graphiques sont utilisés
GMEC1311 Dessin d ingénierie Chapitre 1: Introduction Contenu du chapitre Introduction au dessin technique Normes Vues Traits Échelle Encadrement 2 Introduction Les dessins ou graphiques sont utilisés
FICHE METIER. «Opérateur de prises de vue» Opérateur de prises de vue vidéo. Cadreur. Pointeur vidéo APPELLATION(S) DU METIER DEFINITION DU METIER
 DU METIER DEFINITION DU METIER") Opérateur de prises de vue Version 1 «Opérateur de prises de vue» APPELLATION(S) DU METIER Opérateur de prises de vue vidéo Cadreur Pointeur vidéo DEFINITION DU METIER L'opérateur de prises de vue assure
Opérateur de prises de vue Version 1 «Opérateur de prises de vue» APPELLATION(S) DU METIER Opérateur de prises de vue vidéo Cadreur Pointeur vidéo DEFINITION DU METIER L'opérateur de prises de vue assure
Synthèse d images Edmond Boyer
 Synthèse d images Edmond Boyer Edmond.Boyer@imag.fr UFRIMA 1 Une introduction aux techniques de l image Techniques de l image : utiliser l ordinateur pour interpréter ou générer des imag es. Motivations
Synthèse d images Edmond Boyer Edmond.Boyer@imag.fr UFRIMA 1 Une introduction aux techniques de l image Techniques de l image : utiliser l ordinateur pour interpréter ou générer des imag es. Motivations
Pourquoi l apprentissage?
 Pourquoi l apprentissage? Les SE sont basés sur la possibilité d extraire la connaissance d un expert sous forme de règles. Dépend fortement de la capacité à extraire et formaliser ces connaissances. Apprentissage
Pourquoi l apprentissage? Les SE sont basés sur la possibilité d extraire la connaissance d un expert sous forme de règles. Dépend fortement de la capacité à extraire et formaliser ces connaissances. Apprentissage
ANALYSE WEB. Baromètre 2015. Les Nouvelles tendances technologiques
 ANALYSE WEB Baromètre 2015 Les Nouvelles tendances technologiques Le CES, la grand messe de l'électronique de Las Vegas s'est tenue début janvier. De nombreuses technologies y ont été présentées. Au-delà
ANALYSE WEB Baromètre 2015 Les Nouvelles tendances technologiques Le CES, la grand messe de l'électronique de Las Vegas s'est tenue début janvier. De nombreuses technologies y ont été présentées. Au-delà
Cartographie Mobile à MINES ParisTech
 Cartographie Mobile à MINES ParisTech Entre robotique, géomatique et nouveaux usages Pr. François Goulette Plan 4 septembre 2013 2 Automatisation de maintenance en environnements industriels (1993) Automatisation
Cartographie Mobile à MINES ParisTech Entre robotique, géomatique et nouveaux usages Pr. François Goulette Plan 4 septembre 2013 2 Automatisation de maintenance en environnements industriels (1993) Automatisation
AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES
 1 AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES 2 Axes de recherche L activité du DIM LSC concerne la méthodologie de la conception et le développement de systèmes à forte
1 AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES 2 Axes de recherche L activité du DIM LSC concerne la méthodologie de la conception et le développement de systèmes à forte
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
Sommaire. Bertrand PECUCHET
 Sommaire I. Introduction... 2 II. Présentation de la Kinect... 3 1. Caractéristiques :... 4 III. Focus sur les différents capteurs de la Kinect... 5 1. Le capteur RGB... 5 2. Capteur et émetteur Infrarouge...
Sommaire I. Introduction... 2 II. Présentation de la Kinect... 3 1. Caractéristiques :... 4 III. Focus sur les différents capteurs de la Kinect... 5 1. Le capteur RGB... 5 2. Capteur et émetteur Infrarouge...
SLAM Visuel 3D pour robot mobile autonome
 Master de Sciences Mention «Imagerie, Robotique et Ingénierie pour le Vivant» - Projet de Fin D étude - SLAM Visuel 3D pour robot mobile autonome Romain Drouilly Encadrants ECA Benoit Morisset Pierrick
Master de Sciences Mention «Imagerie, Robotique et Ingénierie pour le Vivant» - Projet de Fin D étude - SLAM Visuel 3D pour robot mobile autonome Romain Drouilly Encadrants ECA Benoit Morisset Pierrick
S.P.S.N. Lac du Der 2008
 S.P.S.N. Lac du Der 2008 Qu'est-ce qu'un histogramme? C'est un graphique qui montre la répartition des pixels de l'image en fonction de leur luminosité. Chaque type d'image (normale, surexposée, sous exposée,
S.P.S.N. Lac du Der 2008 Qu'est-ce qu'un histogramme? C'est un graphique qui montre la répartition des pixels de l'image en fonction de leur luminosité. Chaque type d'image (normale, surexposée, sous exposée,
Matériel informatique (hardware)
") Matériel informatique (hardware) Le matériel informatique (en anglais hardware) est l'ensemble des équipements en électronique numérique (aussi appelée électronique digitale) servant au traitement des
Matériel informatique (hardware) Le matériel informatique (en anglais hardware) est l'ensemble des équipements en électronique numérique (aussi appelée électronique digitale) servant au traitement des
pcon.planner 6 Préparer et présenter une implantation en toute simplicité
 pcon.planner 6 Préparer et présenter une implantation en toute simplicité Sommaire 1. Installation :... 3 2. Démarrer le logiciel :... 3 3. Interface :... 3 4. Naviguer :... 4 5. Réaliser une implantation
pcon.planner 6 Préparer et présenter une implantation en toute simplicité Sommaire 1. Installation :... 3 2. Démarrer le logiciel :... 3 3. Interface :... 3 4. Naviguer :... 4 5. Réaliser une implantation
Prise en main du logiciel Smart BOARD
 Prise en main du logiciel Smart BOARD 1. Introduction : Le logiciel Smart BOARD est utilisable avec les tableaux blancs interactifs de la gamme SMART. Toutefois, il n'est pas nécessaire d'avoir un tbi
Prise en main du logiciel Smart BOARD 1. Introduction : Le logiciel Smart BOARD est utilisable avec les tableaux blancs interactifs de la gamme SMART. Toutefois, il n'est pas nécessaire d'avoir un tbi
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
v3 2010 Sygic, a.s. All rights reserverd. Manuel utilisateur
 v3 2010 Sygic, a.s. All rights reserverd. Manuel utilisateur I. Pour commencer... 1 Ecran de navigation... 1 Entrer une adresse... 1 Navigation pas à pas... 5 Acquisition de la position GPS... 6 II. Navigation
v3 2010 Sygic, a.s. All rights reserverd. Manuel utilisateur I. Pour commencer... 1 Ecran de navigation... 1 Entrer une adresse... 1 Navigation pas à pas... 5 Acquisition de la position GPS... 6 II. Navigation
Intelligence artificielle et les défis en robotique mobile et autonome
 Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS
 MAHER HANAFI ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS Mémoire présenté à la Faculté des études supérieures et postdoctorales de l Université Laval dans le cadre
MAHER HANAFI ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS Mémoire présenté à la Faculté des études supérieures et postdoctorales de l Université Laval dans le cadre
Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité. * Le meilleur de l emballage
 : Détection visuelle d objets et inspection qualité. * Le meilleur de l emballage") Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité * * Le meilleur de l emballage MVS Composants Domaines d application Données techniques Automatisation efficace de la production
Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité * * Le meilleur de l emballage MVS Composants Domaines d application Données techniques Automatisation efficace de la production
Fête de la science Initiation au traitement des images
 Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Programme détaillé des enseignements
 Programme détaillé des enseignements SEMESTRE S1 commun aux spécialités (MSIR, IDL, TechMed) Type d'u.e. (1) OP Intitulé et descriptif des U.E. GENIE LOGICIEL AVANCE Gestion de projets. Qualité logicielle.
Programme détaillé des enseignements SEMESTRE S1 commun aux spécialités (MSIR, IDL, TechMed) Type d'u.e. (1) OP Intitulé et descriptif des U.E. GENIE LOGICIEL AVANCE Gestion de projets. Qualité logicielle.
LES CAPTEURS CCD/CMOS
 Jérôme SIX Léo MEIGNAN Licence Professionnelle Gestion de la Production Industrielle, spécialité Vision Industrielle LES CAPTEURS CCD/CMOS Introduction...3 I) CCD...4 I.1) Historique...4 I.2) Fonctionnement...4
Jérôme SIX Léo MEIGNAN Licence Professionnelle Gestion de la Production Industrielle, spécialité Vision Industrielle LES CAPTEURS CCD/CMOS Introduction...3 I) CCD...4 I.1) Historique...4 I.2) Fonctionnement...4
Acquérir et intégrer des données géographiques
 Acquérir et intégrer des données géographiques Acquérir et intégrer des données géographiques 1) Les types de données géographiques 2) Les sources de données géographiques 3) Niveau de détail des cartes
Acquérir et intégrer des données géographiques Acquérir et intégrer des données géographiques 1) Les types de données géographiques 2) Les sources de données géographiques 3) Niveau de détail des cartes
Algèbre 40 Analyse 26 14 Stat. 1 - IES : Probabilités discrètes et calcul intégral 29,5 6 Stat. 2 - IES : Probabilités générales 54 8 UE1-02 M-E-IS
 1er semestre UE1-01 E Algèbre 40 Analyse 26 14 Stat. 1 - IES : Probabilités discrètes et calcul intégral 29,5 6 Stat. 2 - IES : Probabilités générales 54 8 UE1-02 M-E-IS Introduction au système SAS 25,5
1er semestre UE1-01 E Algèbre 40 Analyse 26 14 Stat. 1 - IES : Probabilités discrètes et calcul intégral 29,5 6 Stat. 2 - IES : Probabilités générales 54 8 UE1-02 M-E-IS Introduction au système SAS 25,5
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer!
 JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
Analyse d images. Edmond.Boyer@imag.fr. Edmond Boyer UFRIMA 1
 Analyse d images Edmond.Boyer@imag.fr Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images Edmond.Boyer@imag.fr Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Les Conditions aux limites
 Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
Un exemple avec WORKSPACE d'interwrite
 S'approprier un utilitaire de TNI Un exemple avec WORKSPACE d'interwrite Objectifs : S'approprier un utilitaire de TNI («soft»)afin de percevoir la plus-value pédagogique de l'outil. Pour cela utiliser
S'approprier un utilitaire de TNI Un exemple avec WORKSPACE d'interwrite Objectifs : S'approprier un utilitaire de TNI («soft»)afin de percevoir la plus-value pédagogique de l'outil. Pour cela utiliser
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Modeling reality with the latest in 3D technology: Virtualisation. Aperçu
 Rencontres art, science, technique & architecture (RASTA_02) De l acquisition à la restitution de données numériques 3D 31 octobre 2002 C2RMF-DMF 6 rue des Pyramides75 041 Paris Modeling reality with the
Rencontres art, science, technique & architecture (RASTA_02) De l acquisition à la restitution de données numériques 3D 31 octobre 2002 C2RMF-DMF 6 rue des Pyramides75 041 Paris Modeling reality with the
Leica Application Suite. Archive
 Leica Application Suite Archive Archivage LAS pour la microscopie numérique Les solutions professionnelles et personnalisées de gestion des données numériques n'ont jamais été aussi recherchées, notamment
Leica Application Suite Archive Archivage LAS pour la microscopie numérique Les solutions professionnelles et personnalisées de gestion des données numériques n'ont jamais été aussi recherchées, notamment
PROJET BIGDATART DOSSIER DE PRESENTATION
 PROJET BIGDATART DOSSIER DE PRESENTATION Le projet BigDatArt est une installation scientifico-artistique centrée autour des notions d images et de BigData. Ce que je propose dans mon projet et d'inverser
PROJET BIGDATART DOSSIER DE PRESENTATION Le projet BigDatArt est une installation scientifico-artistique centrée autour des notions d images et de BigData. Ce que je propose dans mon projet et d'inverser
Cartographie mobile implantée au service de police de la ville de Québec
 Cartographie mobile implantée au service de police de la ville de Québec NSim Technology Jimmy Perron, M. Sc. Président NSim Technology Le SPVQ > Désert plus de 550 000 citoyens > 1000 employés (Policiers
Cartographie mobile implantée au service de police de la ville de Québec NSim Technology Jimmy Perron, M. Sc. Président NSim Technology Le SPVQ > Désert plus de 550 000 citoyens > 1000 employés (Policiers
Chapitre 18 : Transmettre et stocker de l information
 Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Chapitre 18 : Transmettre et stocker de l information Connaissances et compétences : - Identifier les éléments d une chaîne de transmission d informations. - Recueillir et exploiter des informations concernant
Franck VAUTIER, Jean-Pierre TOUMAZET, Erwan ROUSSEL, Marlène FAURE, Mohamed ABADI, Marta FLOREZ, Bertrand DOUSTEYSSIER
 Utilisation d images dérivées d un jeu de données LIDAR pour la détection automatisée de vestiges archéologiques (programme de recherche méthodologique LiDARCHEO) Franck VAUTIER, Jean-Pierre TOUMAZET,
Utilisation d images dérivées d un jeu de données LIDAR pour la détection automatisée de vestiges archéologiques (programme de recherche méthodologique LiDARCHEO) Franck VAUTIER, Jean-Pierre TOUMAZET,
Apprentissage Automatique
 Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
Apprentissage Automatique Introduction-I jean-francois.bonastre@univ-avignon.fr www.lia.univ-avignon.fr Définition? (Wikipedia) L'apprentissage automatique (machine-learning en anglais) est un des champs
Tux Paint. 1. Informations générales sur le logiciel. Auteur : Bill Kendrick et l équipe de développement de New Breed Software
 1. Informations générales sur le logiciel Auteur : Bill Kendrick et l équipe de développement de New Breed Software Version : 0.9.13 Licence : GPL Date de parution : octobre 2004 Environnement requis :
1. Informations générales sur le logiciel Auteur : Bill Kendrick et l équipe de développement de New Breed Software Version : 0.9.13 Licence : GPL Date de parution : octobre 2004 Environnement requis :
GL BE FLYER. Chef de projet de l équipe : SCIONICO Pierre
 GL BE FLYER Chef de projet de l équipe : SCIONICO Pierre Membres de l équipe : BRESSON Adrien THIERY Kévin SCIONICO Pierre ALBERTINI Rémi ROBERT Cédric Tuteur du projet : GESQUIERE Gilles IUT de l'université
GL BE FLYER Chef de projet de l équipe : SCIONICO Pierre Membres de l équipe : BRESSON Adrien THIERY Kévin SCIONICO Pierre ALBERTINI Rémi ROBERT Cédric Tuteur du projet : GESQUIERE Gilles IUT de l'université
La recherche d'information sur Internet
 La recherche d'information sur Internet Compétence du socle : Je sais utiliser les fonctions principales d'un outil de recherche sur le Web (moteur de recherche, annuaire...) CDI du collège Léon Cazeneuve
La recherche d'information sur Internet Compétence du socle : Je sais utiliser les fonctions principales d'un outil de recherche sur le Web (moteur de recherche, annuaire...) CDI du collège Léon Cazeneuve
PHOTOSHOP - L'AFFICHAGE
 PHOTOSHOP - L'AFFICHAGE Maîtriser les différents types d'affichages Les modes d'affichages Agrandissement et réduction de l'espace de travail L'outil zoom et main / La palette de navigation Réorganisation
PHOTOSHOP - L'AFFICHAGE Maîtriser les différents types d'affichages Les modes d'affichages Agrandissement et réduction de l'espace de travail L'outil zoom et main / La palette de navigation Réorganisation
imaginez-vous un univers de possibilités BOOK2014-2015 imagine yourself in a world of opportunities... http://recrutement.akka.eu
 BOOK2014-2015 imaginez-vous un univers de possibilités imagine yourself in a world of opportunities... http://recrutement.akka.eu BOOK France imaginez-vous un univers de possibilités http://recrutement.akka.eu
BOOK2014-2015 imaginez-vous un univers de possibilités imagine yourself in a world of opportunities... http://recrutement.akka.eu BOOK France imaginez-vous un univers de possibilités http://recrutement.akka.eu
Exercices Corrigés Premières notions sur les espaces vectoriels
 Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Exercices Corrigés Premières notions sur les espaces vectoriels Exercice 1 On considére le sous-espace vectoriel F de R formé des solutions du système suivant : x1 x 2 x 3 + 2x = 0 E 1 x 1 + 2x 2 + x 3
Réalité virtuelle au service de la maintenance
 Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Comment dit-on qu'une étoile est plus vieille qu'une autre ou plus jeune qu'une autre?
 Comment dit-on qu'une étoile est plus vieille qu'une autre ou plus jeune qu'une autre? Comment peut-on donner un âge à l'univers? Dans l'univers, il y a beaucoup de choses : des étoiles, comme le Soleil...
Comment dit-on qu'une étoile est plus vieille qu'une autre ou plus jeune qu'une autre? Comment peut-on donner un âge à l'univers? Dans l'univers, il y a beaucoup de choses : des étoiles, comme le Soleil...
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
Université Libre de Tunis
 Ingénieur: Génie Informatique Code et Intitulé des Matières Enseignées Plan d'etudes : Semestre 1 S1-01 Algorithmique et Structures de Données 1 S1-02 Programmation C S1-03 Logiques Mathématiques S1-04
Ingénieur: Génie Informatique Code et Intitulé des Matières Enseignées Plan d'etudes : Semestre 1 S1-01 Algorithmique et Structures de Données 1 S1-02 Programmation C S1-03 Logiques Mathématiques S1-04
L EFFET PARALLAXE N EST
 50 3 Objets L EFFET PARALLAXE N EST PAS SPÉCIFIQUEMENT UN TRUCAGE D AFTER EFFECTS. C est un principe que vous devriez avoir à l esprit quand vous travaillez en 3D. En raison de la nature de la 3D dans
50 3 Objets L EFFET PARALLAXE N EST PAS SPÉCIFIQUEMENT UN TRUCAGE D AFTER EFFECTS. C est un principe que vous devriez avoir à l esprit quand vous travaillez en 3D. En raison de la nature de la 3D dans
Groupe Eyrolles, 2006, ISBN : 2-212-11959-3
 Groupe Eyrolles, 2006, ISBN : 2-212-11959-3 annexe B Piano Corner, (c) 2005 par Zsolt Stefan : http://deeppixel.uw.hu/gallery.html YafRay, le moteur de rendu photoréaliste Dès sa création, par une équipe
Groupe Eyrolles, 2006, ISBN : 2-212-11959-3 annexe B Piano Corner, (c) 2005 par Zsolt Stefan : http://deeppixel.uw.hu/gallery.html YafRay, le moteur de rendu photoréaliste Dès sa création, par une équipe
Projet de Traitement du Signal Segmentation d images SAR
 Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
Projet de Traitement du Signal Segmentation d images SAR Introduction En analyse d images, la segmentation est une étape essentielle, préliminaire à des traitements de haut niveau tels que la classification,
IFO. Soleil. Antoine COUSYN 29/07/2012 08/02/2015. Vidéo. Manipur, Inde. Saturation du capteur CMOS. 19 Juin 2011. 15h11 heure locale.
 Rapport d expertise IPACO Nom de l expert Antoine COUSYN Date du rapport 29/07/2012 Dernière mise à jour 08/02/2015 Type IFO Classe A Explication Saturation du capteur CMOS Complément Soleil Document Lieu
Rapport d expertise IPACO Nom de l expert Antoine COUSYN Date du rapport 29/07/2012 Dernière mise à jour 08/02/2015 Type IFO Classe A Explication Saturation du capteur CMOS Complément Soleil Document Lieu
CEGEP DU VIEUX-MONTRÉAL
 PLAN DE COURS C.A.O. Avancée Compétence visée : 013C (Exploiter les fonctions spécialisées d un logiciel de dessin assisté par ordinateur) PONDÉRATION: 2-2-2 PROGRAMME : TECHNIQUE DE GÉNIE MÉCANIQUE 241-06
PLAN DE COURS C.A.O. Avancée Compétence visée : 013C (Exploiter les fonctions spécialisées d un logiciel de dessin assisté par ordinateur) PONDÉRATION: 2-2-2 PROGRAMME : TECHNIQUE DE GÉNIE MÉCANIQUE 241-06
Sujet. calculatrice: autorisée durée: 4 heures
 DS SCIENCES PHYSIQUES MATHSPÉ calculatrice: autorisée durée: 4 heures Sujet Approche d'un projecteur de diapositives...2 I.Questions préliminaires...2 A.Lentille divergente...2 B.Lentille convergente et
DS SCIENCES PHYSIQUES MATHSPÉ calculatrice: autorisée durée: 4 heures Sujet Approche d'un projecteur de diapositives...2 I.Questions préliminaires...2 A.Lentille divergente...2 B.Lentille convergente et
F210. Automate de vision hautes fonctionnalités. Caractèristiques. Algorithmes vectoriels
 Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Programmes des classes préparatoires aux Grandes Ecoles
 Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voies : Mathématiques, physique et sciences de l'ingénieur (MPSI) Physique, chimie et sciences de l ingénieur (PCSI) Physique,
Programmes des classes préparatoires aux Grandes Ecoles Filière : scientifique Voies : Mathématiques, physique et sciences de l'ingénieur (MPSI) Physique, chimie et sciences de l ingénieur (PCSI) Physique,
Présenta)on des ac)vités de recherche de l équipe PR du laboratorie MIS
on des ac)vités de recherche de l équipe PR du laboratorie MIS") Localisa1on et Naviga1on de Robots M2 EEAII, parcours ViRob, A.U. 2014-2015 Présenta)on des ac)vités de recherche de l équipe PR du laboratorie MIS Fabio MORBIDI E-mail: fabio.morbidi@u-picardie.fr Laboratorie
Localisa1on et Naviga1on de Robots M2 EEAII, parcours ViRob, A.U. 2014-2015 Présenta)on des ac)vités de recherche de l équipe PR du laboratorie MIS Fabio MORBIDI E-mail: fabio.morbidi@u-picardie.fr Laboratorie
Zone 2 L aventure de la copie
 EXPOSITION INTERNATIONALE INTERNATIONAL EXHIBITION Zone 2 L aventure de la copie 1. Synopsis... 2 2. Scénographie... 3 3. Mobiliers... 3 4. Supports graphiques... 4 5. Eclairage... 4 6. Audiovisuels...
EXPOSITION INTERNATIONALE INTERNATIONAL EXHIBITION Zone 2 L aventure de la copie 1. Synopsis... 2 2. Scénographie... 3 3. Mobiliers... 3 4. Supports graphiques... 4 5. Eclairage... 4 6. Audiovisuels...
Calculer avec Sage. Revision : 417 du 1 er juillet 2010
 Calculer avec Sage Alexandre Casamayou Guillaume Connan Thierry Dumont Laurent Fousse François Maltey Matthias Meulien Marc Mezzarobba Clément Pernet Nicolas Thiéry Paul Zimmermann Revision : 417 du 1
Calculer avec Sage Alexandre Casamayou Guillaume Connan Thierry Dumont Laurent Fousse François Maltey Matthias Meulien Marc Mezzarobba Clément Pernet Nicolas Thiéry Paul Zimmermann Revision : 417 du 1
Object Removal by Exemplar-Based Inpainting
 Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Programme de la 1ère année
 Programme de la 1ère année de master informatique Recopié du Syllabus M1 Informatique. 2004-2005 (UPS Toulouse) TC1 - Conception et Programmation Parallèle et Orientée Objet (96h) Objectif : Ce cours a
Programme de la 1ère année de master informatique Recopié du Syllabus M1 Informatique. 2004-2005 (UPS Toulouse) TC1 - Conception et Programmation Parallèle et Orientée Objet (96h) Objectif : Ce cours a
Masses de données. 1. Introduction 2. Problématiques 3. Socle de formation (non présenté) 4. Liens avec Formation INSA
 4. Liens avec Formation INSA") Masses de données 1. Introduction 2. Problématiques 3. Socle de formation (non présenté) 4. Liens avec Formation INSA Rédacteurs : Mjo Huguet / N. Jozefowiez 1. Introduction : Besoins Informations et Aide
Masses de données 1. Introduction 2. Problématiques 3. Socle de formation (non présenté) 4. Liens avec Formation INSA Rédacteurs : Mjo Huguet / N. Jozefowiez 1. Introduction : Besoins Informations et Aide
Dossier 03 Périphériques d acquisition
 Dossier 03 Périphériques d acquisition I. PERIPHERIQUES D ACQUISITION... 1 II. CARACTERISTIQUES GENERALES... 2 A. CLAVIER... 2 B. SOURIS... 3 C. LECTEUR DE CODES A BARRES (OU CODE-BARRES)... 3 D. SCANNER...
Dossier 03 Périphériques d acquisition I. PERIPHERIQUES D ACQUISITION... 1 II. CARACTERISTIQUES GENERALES... 2 A. CLAVIER... 2 B. SOURIS... 3 C. LECTEUR DE CODES A BARRES (OU CODE-BARRES)... 3 D. SCANNER...
Indications pour une progression au CM1 et au CM2
 Indications pour une progression au CM1 et au CM2 Objectif 1 Construire et utiliser de nouveaux nombres, plus précis que les entiers naturels pour mesurer les grandeurs continues. Introduction : Découvrir
Indications pour une progression au CM1 et au CM2 Objectif 1 Construire et utiliser de nouveaux nombres, plus précis que les entiers naturels pour mesurer les grandeurs continues. Introduction : Découvrir
Les sciences de l ingénieur appliquées à la prise en charge du
 Les sciences de l ingénieur appliquées à la prise en charge du cancer : enjeux et opportunités Début de cartographie des enjeux cliniques et technologiques gq Jean-François MENUDET, Cluster I-Care Cartographie
Les sciences de l ingénieur appliquées à la prise en charge du cancer : enjeux et opportunités Début de cartographie des enjeux cliniques et technologiques gq Jean-François MENUDET, Cluster I-Care Cartographie
Utilisation du logiciel ImageJ gratuit
 Utilisation du logiciel ImageJ gratuit on peut récupérer sur le lien suivant : http://rsbweb.nih.gov/ij/ à partir duquel ce résumé très bref (!!) a été élaboré Lancer ImageJ Vous avez une fenêtre qui s'ouvre
Utilisation du logiciel ImageJ gratuit on peut récupérer sur le lien suivant : http://rsbweb.nih.gov/ij/ à partir duquel ce résumé très bref (!!) a été élaboré Lancer ImageJ Vous avez une fenêtre qui s'ouvre
Cie L*43.62 a* -0.12 b* -20.16. Des couleurs qui tiennent la route. Solutions de gestion des couleurs pour le secteur de l automobile
 Cie L*43.62 a* -0.12 b* -20.16 Des couleurs qui tiennent la route Solutions de gestion des couleurs pour le secteur de l automobile La couleur fait la différence Qu il s agisse d établir l identité visuelle
Cie L*43.62 a* -0.12 b* -20.16 Des couleurs qui tiennent la route Solutions de gestion des couleurs pour le secteur de l automobile La couleur fait la différence Qu il s agisse d établir l identité visuelle