G R O U P E. Rapport. Projet VHDL. Charles Sylvain
|
|
|
- Brian Gauvin
- il y a 8 ans
- Total affichages :
Transcription
1 G R O U P E Rapport Projet VHDL I4 Novembre 2004 Charles Sylvain

2 SOMMAIRE I. DESCRIPTION DU PROJET... 3 A. LES ENTREES/SORTIES... 3 B. CONTRAINTES ET CARACTERISTIQUES... 3 C. DESCRIPTION DU COMPOSANT... 4 II. PARTIE LOGIQUE... 5 A. LE DETECTEUR DE FRONT... 6 B. LE COMPTEUR MODULO C. LE COMPTEUR DE VITESSE ET LE BLOC «SAUVEGARDE ET FIXATION»... 7 III. MACHINE D ETAT... 8 A. PROTOCOLE DE COMMUNICATION... 8 B. PRINCIPE DE FONCTIONNEMENT... 8 IV. SIMULATION... 9 A. DESCRIPTION DE LA SIMULATION... 9 B. EXEMPLES DE FONCTIONNEMENT V. OPTIMISATION A. SYNTHESE B. OPTIMISATION C. CONTRAINTES DE TEMPS CONCLUSION ANNEXE 1 : CODES SOURCES ESIEE 2004/2005 2

3 EL411 - VHDL Rapport de projet Le but de ce projet de l unité de VHDL du début de la quatrième année est de mettre en pratique les connaissances acquises pendant un mois et demi. L exemple concret proposé ici nous permet ainsi de réaliser un circuit, du cahier des charges jusqu à la simulation, sans oublier l optimisation du composant dans l éventualité d une future implémentation. I. Description du projet L objectif du projet est de déterminer la vitesse d un moteur par comptage d impulsions. Un capteur monté sur le stator du moteur émet des impulsions à raison de 30 impulsons par tour. Au bout des 30 impulsions, le système envoie une valeur proportionnelle à la vitesse du moteur. Pour réaliser ce système, nous avons décidé de créer un compteur qui, à chaque fois que le moteur fait un tour, envoie sa valeur sur la sortie. Le compteur est incrémenté à chaque front d horloge. A. Les Entrées/Sorties Le composant est doté de 4 entrées sur 1 bit : - I : entrée provenant du moteur sur laquelle on peut relever les impulsions correspondant aux tours du moteur. Impulsions comptées sur front montant. - Clk ou H : l horloge du système cadencée à 20 MHz. - Raz : Remise à zéro du composant. Actif à l état bas. - Rq : «Request», ligne provenant d un système externe informant le composant qu une valeur de la vitesse veut être lue. Le composant est doté de 1 sortie sur 1 bit et de 1 sortie sur 21 bits : - Ack : «Acknowledge», informe le système externe qu une valeur peut être lue. - V : bus sur 21 bits représentant la vitesse du moteur. B. Contraintes et Caractéristiques 1. La forme de l impulsion Pour que le composant puisse calculer correctement la vitesse du moteur, il faut que les impulsions aient une largeur au moins égale à 40 ns ce qui correspond à la période de ESIEE 2004/2005 3

4 l horloge. En effet, le front montant de l impulsion est détecté en se calant sur les fronts d horloge. De plus, le temps entre chaque impulsion doit également être égal à 40 ns. On remarque sur le chronogramme ci-dessus que si l impulsion est plus courte que 40 ns alors elle ne sera pas détectée et que si deux impulsions se suivent de moins de 40 ns alors, la deuxième impulsion sera ignorée. 2. Vitesse minimum La vitesse minimum souhaitée est de 20 tours/s. Avec un bus de 21 bits, il est possible de descendre à une vitesse minimum de 12 tours/s. 20 tours par secondes => 1 tour toutes les 50 millisecondes. La vitesse de l horloge étant de 25 MHz, en 50 ms, le compteur a atteint la valeur de Il faut donc un bus d au minimum 21 bits pour atteindre cette valeur. Avec 21 bits, on peut même compter jusqu à , ce qui représente 0,08 secondes par tour, c est à dire 12 tours par secondes. 3. Vitesse maximum La vitesse maximum du moteur pouvant être calculée est directement liée avec la forme de l impulsion. La durée d une impulsion étant au minimum de 40 ns et le temps entre chaque impulsion étant également de 40 ns, au maximum, on peut avoir 1 tour toutes les ns, ce qui correspond à tours par seconde. Physiquement, ce résultat n a pas beaucoup d importance tellement sa valeur est grande mais cela montre que la fréquence de l horloge est largement suffisante pour calculer la vitesse de rotation de moteurs très rapides. C. Description du composant Le système se sépare en en deux parties très distinctes, une partie logique, qui génère la valeur correspondant à la vitesse du moteur et une partie machine d état qui gère l interface avec le système externe. Le seul lien qu il y ait entre la machine d état et la partie logique est le signal Stop qui permet de bloquer la valeur de sortie V pendant sa lecture par le système externe. ESIEE 2004/2005 4

5 Structure interne simplifié du composant La valeur de V est mise à jour à chaque fois que le moteur fait 1 tour si Stop = 0, sinon, dès que Stop repasse à l état bas. II. Partie Logique La partie combinatoire est composée de 4 blocs distincts : Un détecteur de front montant pour détecter les impulsions en provenance du moteur Un compteur modulo 30 qui compte le nombre d impulsions du moteur Un compteur sur 21 bits correspondant à la vitesse du moteur et remis à zéro lorsque le moteur a fait 1 tours. Un bloc qui sauvegarde et fige la valeur de la vitesse sur le bus V Partie Combinatoire ESIEE 2004/2005 5

6 A. Le détecteur de front Voici le schéma logique du détecteur de front montant. Détecteur de front montant Le principe du détecteur de front est de comparer deux instants successifs ( par rapport à l horloge ) et de comparer si le signal est passé de l état bas à haut. Ainsi, lorsqu un front est détecté, la sortie I_f passe à 1 pendant 1 cycle d horloge. I_f est ensuite branché sur le compteur qui comptabilise le nombre de front détecté. B. Le compteur modulo 30 Le compteur modulo 30 a pour rôle de compter 30 impulsions venant du moteur par l intermédiaire de I_f. Une fois les 30 impulsions atteintes, le compteur génère un signal cmpt30 pendant une période de l horloge qui indique au compteur de vitesse de sauvegarder sa valeur et de recommencer à zéro. Voici le schéma du compteur modulo 30 : Compteur modulo 30 Le bloc CMP est un comparateur qui teste si cmpt est égal à 29. Si c est le cas, cmpt30 est généré et le compteur de vitesse remis à zéro. ESIEE 2004/2005 6

7 C. Le compteur de vitesse et le bloc «sauvegarde et fixation» Schéma logique 3 étages : Compteur, Sauvegarde, Fixation Le compteur de vitesse est un simple compteur qui s incrémente à chaque top d horloge et qui est remis à zéro, soit par le raz global du circuit, soit par cmpt30 provenant du compteur modulo 30. Ensuite, il est nécessaire de faire un étage de sauvegarde de la valeur de la vitesse à chaque fois que le moteur fait 1 tour. C est un simple multiplexeur avec une bascule qui permet de faire cet étage pour chaque bit du registre. Enfin, l étage de fixation permet de fixer la valeur de sortie pendant que le système externe la lit. Cette fixation se fait grâce au signal Stop qui est activé par la machine d état. Ainsi, lorsque le système externe demande une lecture avec la ligne Rq (Request), la machine d état bloque la sortie avec le signal Stop puis autorise la lecture avec la ligne Ack (Acknowledge). Le système a également été réalisé de manière à ce que, si la valeur de V_int change alors que Stop est activé, V ne change que lorsque Stop repasse à 0. Chronogramme schématique Sur le chronogramme ci-dessus, on peut voir que le V n est mis à jour que lorsque Stop repasse à zéro. Cependant, on aurait pu faire abstraction de l étage de sauvegarde. On pourrait ainsi économiser, sachant que V est un bus de 21 bits, 21 bascules D et 21 multiplexeurs 2 vers 1. Le problème de cette solution est que si V_temp change pendant que la fixation est bloquée par Stop, alors la valeur est perdue et il faut donc attendre 1 tour supplémentaire pour avoir la nouvelle valeur. Le choix de la solution dépend donc de la politique adoptée, c est à dire si l on veut un système qui prend très peu de place ou si l on veut un système qui réagit très vite La solution pourrait dépendre également de la vitesse du moteur. Si le moteur est très lent, la solution à 3 étages paraît la plus adaptée. Si le moteur est très rapide, on peut considérer qu attendre 1 tour est négligeable et donc privilégier la solution à 2 étages. ESIEE 2004/2005 7

8 III. Machine d Etat A. Protocole de communication Pour communiquer notre vitesse V au système externe qui n utilise pas la même horloge, nous utilisons un protocole de communication asynchrone nommé handshaking. Le fonctionnement de ce système est le suivant, lorsque le système externe veut lire la valeur de V, il envoie une requête en mettant la ligne Rq (Request) du composant à l état haut. Notre composant détecte cette requête et fixe la valeur de V pour s assurer que cette valeur ne sera pas modifier avant la fin de la lecture, puis envoie l autorisation de lecture via la ligne Ack (Acknowledge). Quand le système externe a fini de lire il remet la ligne Request à 0. Enfin lorsque notre composant a détecté la fin de la lecture, il remet Acknowledge à 0 pour indiquer qu il est prêt à accepter une nouvelle requête. Ce principe de fonctionnement peut être résumé par le chronogramme suivant : Chronogramme schématique du protocole de communication La solution retenue pour réaliser ce protocole de communication est d utiliser une machine d état qui pourra ainsi gérer les lignes Request, Acknowledge et le signal Stop pour figer la valeur de V. B. Principe de fonctionnement La machine d état gère 3 signaux : - Request : Entrée indiquant au composant qu une valeur veut être lue. - Acknowledge : Sortie indiquant au système externe qu une valeur peut être lue - Stop : Signal interne permettant d assurer la stabilité de la sortie V lors de sa lecture (actif haut). Pour effectuer la gestion du protocole de communication, nous avons besoin de 3 états : - Attente : C est l état initial, c est à dire qu il n y a aucune requête en cours, donc le signal Acknowledge est à 0. De plus lorsque l on est dans cet état, la valeur de V peut changer, donc le signal Stop est à 0. Lorsqu une requête est détectée, la machine d état passe dans l état suivant Request. - Request : C est l état qui met en place les conditions nécessaires à la lecture de V par le système externe, c est à dire que l on garantit la stabilité de V en mettant Stop à 1. La ligne Acknowlege reste 0 pour laisser le temps à V de se stabiliser. La machine d état passe ensuite systématiquement à l état suivant, Acknowledge - Acknowledge : La machine d état continue à assurer la stabilité de V en gardant Stop à 1 et la ligne Acknowledge passe à 1 pour indiquer que la lecture est possible. Le ESIEE 2004/2005 8

9 passage à l état suivant se fait lors de la détection du passage de la ligne Request à 0 ce qui indique la fin de la lecture. La machine d état retourne donc dans l état Attente. Voici la représentation de la machine d état : Machine d Etat Attention : - Le protocole est asynchrone mais cela ne veut pas dire que notre machine d état est asynchrone, donc tous les changements d états se font sur front montant d horloge. - La machine d état comporte un reset asynchrone qui la met dans l état Attente. IV. Simulation A. Description de la simulation Afin de tester la description du projet, nous avons simulé le fonctionnement du système externe grâce à un fichier VHDL de simulation Sim.vhd. Ce fichier nous permet de simuler le comportement de Mvitesse (l entité de notre projet) en réponse aux signaux extérieurs Request, Impulsion, Horloge, et RAZ. Ces signaux sont décrits manuellement pour simuler un fonctionnement réel, par exemple l horloge est décrite comme un signal carré de demipériode 40ns (fréquence de 25Mhz). clk <= not clk after 20 ns; De même nous avons considéré que les impulsions générées par le détecteur du moteur pouvaient être décrites sous la forme d un signal carré. La période de ce signal pouvant être changée dans les limites spécifiées par le cahier des charges. Ici nous avons pris 63 ns pour une demi-période. I <= not I after 63 ns; Nous simulons le fonctionnement du système externe en mettant le signal Rq aux valeurs voulues : 1 si une lecture de la vitesse est demandée, 0 sinon. ESIEE 2004/2005 9

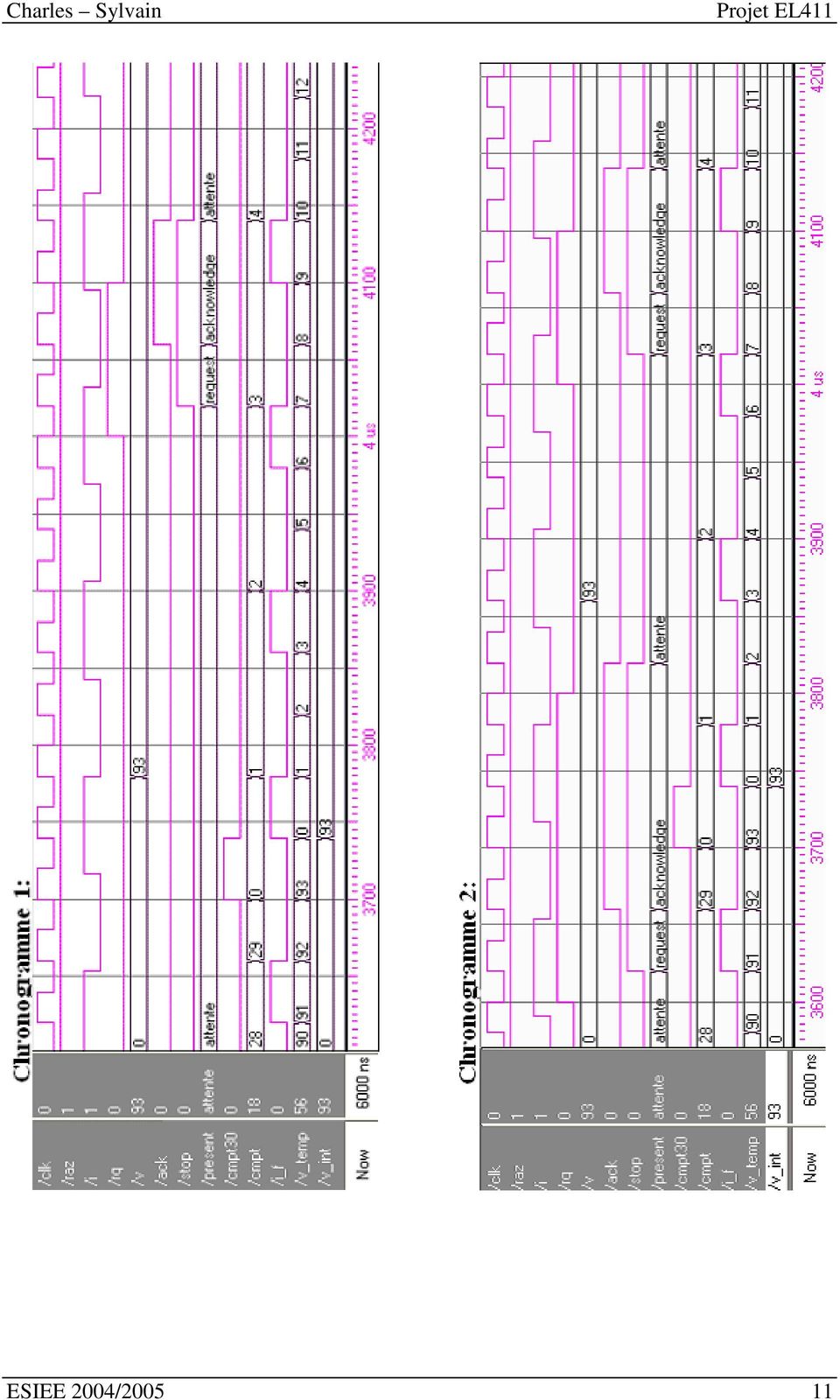
10 Pour observer le comportement du circuit nous observons les chronogrammes des signaux externes (clk, acknowledge, impulsion, raz, request, vitesse), mais nous observons aussi certains signaux internes qui nous permettent de suivre plus facilement le déroulement de la simulation, par exemple la sortie des compteurs ou encore les états de la machine d état. B. Exemples de fonctionnement Premier chronogramme (cf page suivante) La ligne I représente les impulsions envoyées par le moteur, V est la sortie du composant représentant la vitesse. Vers 3700 ns le moteur a effectué son premier tour car le compteur d impulsion arrive à 29. cmpt30 passe donc à 1 pendant un cycle d horloge afin d indiquer qu il faut afficher la nouvelle valeur de V. V_int qui sauvegarde la valeur de la vitesse est mis à la nouvelle valeur de la vitesse, c est à dire la valeur du compteur V_temp. Au coup d horloge suivant V affiche la nouvelle valeur de la vitesse qui est 93 dans notre cas. Les compteurs de vitesse et d impulsions sont remis à zéro. On peut vérifier que le compteur modulo 30 est bien incrémenté à chaque impulsion I. De même le compteur qui indique la vitesse par tour est compte à chaque front montant de l horloge. Pendant ce temps la machine d état est restée à l état d attente car il n y a pas eu de demande de lecture. On simule à 4000 ns un Request du système extérieur. Deux coups d horloge plus tard (le temps de certifier que V est fixe en passant par l état Request de notre machine d état), Ack passe à 1 pour indiquer qu une lecture est possible. Lorsque la lecture a été effectuée (Rq passe à zéro), Ack repasse à zéro pour indiquer au système extérieur qu il peut à nouveau demander une lecture. Deuxième chronogramme Pour vérifier que V est bien bloqué lorsqu il y a une lecture on ré effectue une simulation mais en demandant une lecture (c est à dire Request à 1) avant la fin du premier tour du moteur (passage de 0 à 106 de V). La valeur de V doit rester fixe et ne changer qu à la fin du Request en prenant la nouvelle valeur. L étage de sauvegarde de la partie logique n est utile que dans cette éventualité. On remarque effectivement que sur le chronogramme, à la fin du premier tour du moteur vers 3700 ns, V ne change pas. En effet sa valeur est garantie stable car il y a une lecture en cours. Stop est à 1 et bloque le changement de V. On peut observer que V_int a pris la nouvelle valeur de la vitesse mais qu elle n est pas affectée à V. Dès que la lecture est terminée, Stop repasse à 0 et V prend la nouvelle valeur de la vitesse qui avait été sauvegardée dans V_int. Le fonctionnement est conforme à nos attentes. ESIEE 2004/

11 ESIEE 2004/
12 V. Optimisation Le logiciel BuildGates permet une optimisation des circuits décrits en VHDL pour un gain de place et/ou de vitesse du circuit une fois implémentés. Le rapport de l optimisation permet dans certains cas de détecter des erreurs de conception pour un circuit. La présence de latch non voulues par exemple, ou d un nombre plus important de bascules que prévu indiquent des erreurs non détectées à la compilation. Pour vérifier que le nombre de bascules correspond à notre description du système, nous avons calculé manuellement le nombre de bascules prévues pour notre circuit : Machine d état : 2 bascules (Pour avoir 3 états). Process détecteur de fronts : 2 bascules. Process Compteur modulo 30 : 5 bascules pour le compteur, 1 pour le signal cmpt30 donc 6 bascules. Process Compteur de tours : 21 bascules car il y a une bascule par bits du bus. Process Sauvegarde du nombre de tours : 21 bascules. Process Sortie : 21 bascules. Ce qui fait un total de 73 bascules. A. Synthèse La commande do_build_generic fait la synthèse du VHDL et donne dans le rapport les éléments séquentiels du circuit Sequential Elements Module File Line Name Type Width AS AR SS SR unit1 /nfs/user/eleve/i4 26 I_1_reg FF 1 N Y N N /cuenods/vhdl/unit 1.vhd unit1 /nfs/user/eleve/i4 26 I_2_reg FF 1 N Y N N /cuenods/vhdl/unit 1.vhd unit1 /nfs/user/eleve/i4 37 cmpt30_reg FF 1 N Y N N /cuenods/vhdl/unit 1.vhd unit1 /nfs/user/eleve/i4 37 cmpt_reg FF 5 N Y N N /cuenods/vhdl/unit 1.vhd unit1 /nfs/user/eleve/i4 51 V_temp_reg FF 21 N Y N N /cuenods/vhdl/unit 1.vhd unit1 /nfs/user/eleve/i4 62 V_int_reg FF 21 N Y N N /cuenods/vhdl/unit 1.vhd unit1 /nfs/user/eleve/i4 72 V_reg FF 21 N Y N N /cuenods/vhdl/unit 1.vhd ESIEE 2004/

13 Sequential Elements Module File Line Name Type Width AS AR SS SR mde /nfs/user/eleve/i4 34 present_reg FF 2 N Y N N /cuenods/vhdl/mde. vhd Le total des bascules utilisées correspond au calcul manuel précédent de 73 bascules. Bien que ceci ne garantisse pas forcement un fonctionnement correct, cela permet de faire une vérification de notre description et le résultat est conforme à nos attentes. De plus, on remarque dans la colonne Type qu il n y a pas de bascules Latch. B. Optimisation Ensuite nous réalisons l optimisation de notre circuit avec les paramètres par défaut pour qu il prenne le moins de surface possible et ait une vitesse de fonctionnement satisfaisante. Le résultat la commande do_optimize donne la taille prise par le composant, mais ne calcul pas le temps de propagation maximum (worst slack) car nous n avons pas encore mis de contrainte de temps Mvitesse Cell area Total area Worst slack Local slack CPU(s) Mem(M) INF La commande report_area permet d obtenir le détail des surfaces en fonction des blocs Module Wireload Cell Area Net Area Total Area Mvitesse B0X mde B0X unit1 B0X AWDP_INC_0 B0X C. Contraintes de temps Nous définissons des contraintes temporelles pour s assurer que notre circuit aura un temps de réponse suffisamment rapide. Pour cela nous définissons notre horloge à une période de 40 ns comme précisé dans le cahier des charges. Nous définissons aussi un temps de délai par rapport à l horloge de 5 ns pour les entrées et de 25 ns pour les sorties afin de s assurer que le circuit sera fonctionnel au maximum avec ces délais. Les valeurs sont choisies pour être cohérentes avec la fréquence de l horloge, mais le cahier des charges ne précisant pas ces paramètres, les valeurs ne sont qu indicatives. set_input_delay -clock horloge 5 {Rq I} set_external_delay -clock horloge 25 {V Ack} ESIEE 2004/

14 Avec les contraintes temporelles, lorsque l on refait l optimisation, le résultat donne en plus de la surface le temps maximum de propagation. Ici la surface ne varie pas avec l optimisation précédente car les contraintes de temps ne sont pas très élevées. Le temps de worst slack est de 14,0689 ns ce qui est largement inférieur à la période de l horloge de 40 ns, donc il n y a pas de conflit Mvitesse Cell area Total area Worst slack Local slack CPU(s) Mem(M) ESIEE 2004/

15 Conclusion Le projet présenté a été fini dans les temps et répond au cahier des charges. La simulation montre un fonctionnement correct du circuit et l optimisation ne révèle aucune erreur. Cependant, même si tout semble fonctionner correctement, rien ne nous assure que le programme une fois implémenté dans un FPGA fonctionnera également. Pour cela, il aurait fallu, dans la continuité de notre simulation, faire une simulation post-fit qui prend en compte les temps de propagation et de commutation des bascules (dépendante du composant choisit) et enfin implémenter réellement le programme dans un FPGA pour effectuer des tests. Malheureusement, le temps impartit pour ce projet ne nous a pas permis d arriver jusqu'à la partie finale du développement d un circuit. ESIEE 2004/
 et enfin implémenter réellement le programme dans un FPGA pour effectuer des tests.")
16 ANNEXE 1 : CODES SOURCES Entité principale library ieee; use ieee.std_logic_1164.all; entity Mvitesse is port ( --Entrees clk : in std_logic; Raz : in std_logic; I : in std_logic; Rq : in std_logic; --Sorties V : out std_logic_vector(20 downto 0); Ack : out std_logic); end entity; architecture cool of Mvitesse is signal Stop : std_logic; --Bloque la sortie -- Machine d état mde : entity work.mde(cool) port map (clk=>clk, Raz=>Raz, Rq=>Rq, Ack=>Ack, Stop=>Stop); -- Génération Vitesse cmpts : entity work.unit1(cool) port map (clk=>clk, Raz=>Raz, I=>I, V=>V, Stop=>Stop); end architecture; Machine d état library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity mde is port ( --Entrees clk : in std_logic; Raz : in std_logic; Rq : in std_logic; --Sorties Ack : out std_logic; Stop : out std_logic); --Bloque la sortie end entity mde; architecture cool of mde is type state is (Attente, Request, Acknowledge); signal present, futur : state; ESIEE 2004/
 port map (clk=>clk, Raz=>Raz, Rq=>Rq, Ack=>Ack, Stop=>Stop); -- Génération Vitesse cmpts : entity work.")
17 evolution: process(present, Rq) case present is when Attente => futur<=attente; if Rq='1' then futur<=request; when Request => futur<=acknowledge; when Acknowledge => futur<=acknowledge; if Rq='0' then futur<=attente; end case; end process evolution; synchro: process(clk, Raz) if Raz = '0' then present <= Attente; elsif rising_edge(clk) then present<=futur; end process synchro; action: process(present) Stop<='0'; Ack<='0'; case present is when Attente => Stop<='0'; Ack<='0'; when Request => Stop<='1'; -- Fixe la sortie when Acknowledge => Stop<='1'; Ack<='1'; end case; end process action; end architecture cool; Bloc Combinatoire library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity unit1 is port ( --Entrees I : in std_logic; clk : in std_logic; Raz : in std_logic; Stop : in std_logic; --En provenance du graphe d'etat --Sorties V : out std_logic_vector(20 downto 0)); end entity unit1; architecture cool of unit1 is signal cmpt30 : std_logic; signal I_f, I_1, I_2 : std_logic; signal V_temp, V_int : std_logic_vector(v'range); signal cmpt : natural range 0 to 30; ESIEE 2004/

18 I_f <= I_1 and not(i_2); -- process detecteur de front process(raz, clk) if Raz='0' then I_1 <= '0'; I_2 <= '0'; elsif rising_edge(clk) then I_2<=I_1; I_1<=I; end process; -- process du compteur modulo 30 process(raz, clk) is if Raz='0' then cmpt <= 0; cmpt30<= '0'; elsif rising_edge(clk) then if cmpt = 29 then cmpt30 <= '1'; cmpt <= 0; elsif I_f = '1' then cmpt <= cmpt+1; cmpt30 <= '0'; else cmpt <= cmpt; cmpt30 <= '0'; end process; -- process du compteur de tour process(raz, clk) is if Raz='0' then V_temp<=(others=>'0'); elsif rising_edge(clk) then if cmpt30='1' then V_temp <= (others=>'0'); else V_temp <= std_logic_vector(unsigned(v_temp)+1); end process; -- process sauvegarde du nb de tour -- on aurait pu grouper ce process avec le compteur de tour -- mais pour un soucis de clareté, nous les avons séparés. process(raz, clk) is if Raz='0' then V_int<=(others=>'0'); elsif rising_edge(clk) then if cmpt30='1' then V_int<=V_temp; end process; -- fixation de la valeur process(raz, clk) is if Raz='0' then V<=(others=>'0'); elsif rising_edge(clk) then if Stop='0' then V<=V_int; end process; ESIEE 2004/
; else V_temp <= std_logic_vector(unsigned(v_temp)+1); end process; -- process sauvegarde du nb de tour -- on aurait pu grouper ce process avec le compteur de tour -- mais pour un soucis")
19 end architecture cool; Fichier de simulation library ieee; use ieee.std_logic_1164.all; entity Sim is end entity; architecture cool of Sim is --Entrees fictives signal clk : std_logic := '0'; signal Raz : std_logic; signal I : std_logic := '0'; signal Rq : std_logic := '0'; --Sorties fictives signal V : std_logic_vector(20 downto 0); signal Ack : std_logic; Mvitesse : entity work.mvitesse(cool) port map (clk=>clk, Raz=>Raz, Rq=>Rq, Ack=>Ack, V=>V, I=>I); clk <= not clk after 20 ns; Raz <= '0', '1' after 15 ns; I <= not I after 63 ns; Rq <= '1' after 4000 ns, '0' after 4100 ns; end architecture; ESIEE 2004/
 port map (clk=>clk, Raz=>Raz, Rq=>Rq, Ack=>Ack, V=>V, I=>I); clk <= not clk after 20 ns; Raz <= '0', '1' after 15 ns; I <= not I after 63")
Manipulations du laboratoire
 Manipulations du laboratoire 1 Matériel Les manipulations de ce laboratoire sont réalisées sur une carte électronique comprenant un compteur 4-bit asynchrone (74LS93) avec possibilité de déclenchement
Manipulations du laboratoire 1 Matériel Les manipulations de ce laboratoire sont réalisées sur une carte électronique comprenant un compteur 4-bit asynchrone (74LS93) avec possibilité de déclenchement
SIN-FPGA DESCRIPTION PAR SCHEMA
 SIN-FPGA DESCRIPTION PAR SCHEMA Documents ressources: http://www.altera.com/literature/lit-index.html Introduction to Quartus II : intro_to_quartus2.pdf Documentation QUARTUS II : quartusii_handbook.pdf
SIN-FPGA DESCRIPTION PAR SCHEMA Documents ressources: http://www.altera.com/literature/lit-index.html Introduction to Quartus II : intro_to_quartus2.pdf Documentation QUARTUS II : quartusii_handbook.pdf
Le langage VHDL. Eduardo Sanchez EPFL
 Le langage VHDL Eduardo Sanchez EPFL Livres conseillés: John F. Wakerly Digital design (4th edition) Prentice Hall, 2005 Peter J. Ashenden The designer's guide to VHDL (3rd edition) Morgan Kaufmann, 2008
Le langage VHDL Eduardo Sanchez EPFL Livres conseillés: John F. Wakerly Digital design (4th edition) Prentice Hall, 2005 Peter J. Ashenden The designer's guide to VHDL (3rd edition) Morgan Kaufmann, 2008
T. BLOTIN Lycée Paul-Eluard 93206 SAINT-DENIS
 T. BLOTIN Lycée Paul-Eluard 93206 SAINT-DENIS SOMMAIRE I. Le VHDL pour qui, pourquoi, quand, comment? A. Le VHDL!...... 1 B. Pourquoi un langage de description?...... 1 C. Les limites actuelles...... 2
T. BLOTIN Lycée Paul-Eluard 93206 SAINT-DENIS SOMMAIRE I. Le VHDL pour qui, pourquoi, quand, comment? A. Le VHDL!...... 1 B. Pourquoi un langage de description?...... 1 C. Les limites actuelles...... 2
IFT1215 Introduction aux systèmes informatiques
 Introduction aux circuits logiques de base IFT25 Architecture en couches Niveau 5 Niveau 4 Niveau 3 Niveau 2 Niveau Niveau Couche des langages d application Traduction (compilateur) Couche du langage d
Introduction aux circuits logiques de base IFT25 Architecture en couches Niveau 5 Niveau 4 Niveau 3 Niveau 2 Niveau Niveau Couche des langages d application Traduction (compilateur) Couche du langage d
Conception Systèmes numériques VHDL et synthèse automatique des circuits
 Année 2008-2009 Conception Systèmes numériques VHDL et synthèse automatique des circuits Travaux pratiques Pentium4 Présentation du simulateur VHDL sous environnement Cadence Présentation de l outil Synopsys
Année 2008-2009 Conception Systèmes numériques VHDL et synthèse automatique des circuits Travaux pratiques Pentium4 Présentation du simulateur VHDL sous environnement Cadence Présentation de l outil Synopsys
FONCTION COMPTAGE BINAIRE ET DIVISION DE FRÉQUENCE
 I/ GÉNÉRALITÉS I.1/ Fonction Un compteur binaire est utilisé : -pour compter un certain nombre d'évènements binaires -pour diviser la fréquence d'un signal logique par 2 m Page 1 FONCTION COMPTAGE BINAIRE
I/ GÉNÉRALITÉS I.1/ Fonction Un compteur binaire est utilisé : -pour compter un certain nombre d'évènements binaires -pour diviser la fréquence d'un signal logique par 2 m Page 1 FONCTION COMPTAGE BINAIRE
VIII- Circuits séquentiels. Mémoires
 1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
Architecture des ordinateurs TD1 - Portes logiques et premiers circuits
 Architecture des ordinateurs TD1 - Portes logiques et premiers circuits 1 Rappel : un peu de logique Exercice 1.1 Remplir la table de vérité suivante : a b a + b ab a + b ab a b 0 0 0 1 1 0 1 1 Exercice
Architecture des ordinateurs TD1 - Portes logiques et premiers circuits 1 Rappel : un peu de logique Exercice 1.1 Remplir la table de vérité suivante : a b a + b ab a + b ab a b 0 0 0 1 1 0 1 1 Exercice
SUR MODULE CAMÉRA C38A (OV7620)
") Applications maquette d'étude EP10K20 DÉMULTIPLEXEUR BT.656 SUR MODULE CAMÉRA C38A OV7620 SCHÉMAS ET DESCRIPTIONS AHDL 1. Schéma principal Le démultiplexeur proprement dit est la fonction "Decod_BT656_1".
Applications maquette d'étude EP10K20 DÉMULTIPLEXEUR BT.656 SUR MODULE CAMÉRA C38A OV7620 SCHÉMAS ET DESCRIPTIONS AHDL 1. Schéma principal Le démultiplexeur proprement dit est la fonction "Decod_BT656_1".
Conception Systèmes numériques VHDL et synthèse automatique des circuits
 Année 2011-2012 Conception Systèmes numériques VHDL et synthèse automatique des circuits Travaux pratiques WIDEMACV1 LAAS-CNRS 2011 Présentation du simulateur VHDL sous environnement Cadence Présentation
Année 2011-2012 Conception Systèmes numériques VHDL et synthèse automatique des circuits Travaux pratiques WIDEMACV1 LAAS-CNRS 2011 Présentation du simulateur VHDL sous environnement Cadence Présentation
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
GPA770 Microélectronique appliquée Exercices série A
 GPA770 Microélectronique appliquée Exercices série A 1. Effectuez les calculs suivants sur des nombres binaires en complément à avec une représentation de 8 bits. Est-ce qu il y a débordement en complément
GPA770 Microélectronique appliquée Exercices série A 1. Effectuez les calculs suivants sur des nombres binaires en complément à avec une représentation de 8 bits. Est-ce qu il y a débordement en complément
KL5121. Pour activer des sorties en fonction de la position d'un codeur
 KL5121 Pour activer des sorties en fonction de la position d'un codeur VERSION : 1.0 / PH DATE : 07 Février 2006 Sommaire Ce manuel explique de manière pratique les étapes successives pour mettre en œuvre
KL5121 Pour activer des sorties en fonction de la position d'un codeur VERSION : 1.0 / PH DATE : 07 Février 2006 Sommaire Ce manuel explique de manière pratique les étapes successives pour mettre en œuvre
CONVERTISSEURS NA ET AN
 Convertisseurs numériques analogiques (xo Convertisseurs.doc) 1 CONVTIU NA T AN NOT PLIMINAI: Tous les résultats seront exprimés sous formes littérales et encadrées avant les applications numériques. Les
Convertisseurs numériques analogiques (xo Convertisseurs.doc) 1 CONVTIU NA T AN NOT PLIMINAI: Tous les résultats seront exprimés sous formes littérales et encadrées avant les applications numériques. Les
QUESTION 1 {2 points}
 ELE4301 Systèmes logiques II Page 1 de 8 QUESTION 1 {2 points} En se servant de paramètres électriques donnés dans le Tableau 1 ci-dessous, on désire déterminer la fréquence d opération du compteur présenté
ELE4301 Systèmes logiques II Page 1 de 8 QUESTION 1 {2 points} En se servant de paramètres électriques donnés dans le Tableau 1 ci-dessous, on désire déterminer la fréquence d opération du compteur présenté
Equipement. électronique
 MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE
 EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Cours de Systèmes d Exploitation
 Licence d informatique Synchronisation et Communication inter-processus Hafid Bourzoufi Université de Valenciennes - ISTV Introduction Les processus concurrents s exécutant dans le système d exploitation
Licence d informatique Synchronisation et Communication inter-processus Hafid Bourzoufi Université de Valenciennes - ISTV Introduction Les processus concurrents s exécutant dans le système d exploitation
ADÉQUATION ALGORITHME-ARCHITECTURE APPLIQUÉE AUX CIRCUITS RECONFIGURABLES
 ADÉQUATION ALGORITHME-ARCHITECTURE APPLIQUÉE AUX CIRCUITS RECONFIGURABLES AILTON F. DIAS, MOHAMED AKIL, CHRISTOPHE LAVARENNE, YVES SOREL CNEN/CDTN Divisão de Computação e Informação, CP 941-012-970 Belo
ADÉQUATION ALGORITHME-ARCHITECTURE APPLIQUÉE AUX CIRCUITS RECONFIGURABLES AILTON F. DIAS, MOHAMED AKIL, CHRISTOPHE LAVARENNE, YVES SOREL CNEN/CDTN Divisão de Computação e Informação, CP 941-012-970 Belo
TD Architecture des ordinateurs. Jean-Luc Dekeyser
 TD Architecture des ordinateurs Jean-Luc Dekeyser Fiche 1 Nombres de l informatique Exercice 1 Une entreprise désire réaliser la sauvegarde de ses données sur un site distant. Le volume de données à sauvegarder
TD Architecture des ordinateurs Jean-Luc Dekeyser Fiche 1 Nombres de l informatique Exercice 1 Une entreprise désire réaliser la sauvegarde de ses données sur un site distant. Le volume de données à sauvegarder
ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview.
 ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview. Sciences et Technologies de l Industrie et du Développement Durable Formation des enseignants parcours : ET24 Modèle de
ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview. Sciences et Technologies de l Industrie et du Développement Durable Formation des enseignants parcours : ET24 Modèle de
Fiche technique CPU 314SC/DPM (314-6CG13)
") Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Logique séquentielle
 Bascules et logique séquentielle aniel Etiemble de@lri.fr Logique séquentielle Logique séquentielle Le système a des «états» ans un système séquentiel Éléments de mémorisation Les sorties dépendent des
Bascules et logique séquentielle aniel Etiemble de@lri.fr Logique séquentielle Logique séquentielle Le système a des «états» ans un système séquentiel Éléments de mémorisation Les sorties dépendent des
Guide de démarrage rapide. (pour la version 5.0.)
") Guide de démarrage rapide (pour la version 5.0.) 2 Table des matières Introduction Réglages de l application MyTalk Mobile 1. MODIFICATION 2. DEMARRER 3. AFFICHER 4. SYNTHETISEUR VOCAL 5. NOMBRE DE MOTS
Guide de démarrage rapide (pour la version 5.0.) 2 Table des matières Introduction Réglages de l application MyTalk Mobile 1. MODIFICATION 2. DEMARRER 3. AFFICHER 4. SYNTHETISEUR VOCAL 5. NOMBRE DE MOTS
Tests de performance du matériel
 3 Tests de performance du matériel Après toute la théorie du dernier chapitre, vous vous demandez certainement quelles sont les performances réelles de votre propre système. En fait, il y a plusieurs raisons
3 Tests de performance du matériel Après toute la théorie du dernier chapitre, vous vous demandez certainement quelles sont les performances réelles de votre propre système. En fait, il y a plusieurs raisons
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Conception de circuits numériques et architecture des ordinateurs
 Conception de circuits numériques et architecture des ordinateurs Frédéric Pétrot Année universitaire 2014-2015 Structure du cours C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 Codage des nombres en base 2, logique
Conception de circuits numériques et architecture des ordinateurs Frédéric Pétrot Année universitaire 2014-2015 Structure du cours C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 Codage des nombres en base 2, logique
SYSTEME DE TELESURVEILLANCE VIDEO
 SYSTEME DE TELESURVEILLANCE VIDEO Avril - Juin 98 Résumé des auteurs : Auteurs : Bertrand LASSERRE Responsables : P. KADIONIK Y. BERTHOUMIEU Nombre de pages : 68 Nombre de pages «Annexe» : 0 Remerciements
SYSTEME DE TELESURVEILLANCE VIDEO Avril - Juin 98 Résumé des auteurs : Auteurs : Bertrand LASSERRE Responsables : P. KADIONIK Y. BERTHOUMIEU Nombre de pages : 68 Nombre de pages «Annexe» : 0 Remerciements
Le Raid c est quoi? Comment ca marche? Les différents modes RAID :
 Le Raid c est quoi? Redundant Array of Inexpensive Disks: ensemble redondant de disques peu chers. Le RAID est une technologie qui a été dévellopée en 1988 pour améliorer les performances des unités de
Le Raid c est quoi? Redundant Array of Inexpensive Disks: ensemble redondant de disques peu chers. Le RAID est une technologie qui a été dévellopée en 1988 pour améliorer les performances des unités de
Animation pédagogique sur l oscilloscope à mémoire Hameg HM 507
 Animation pédagogique sur l oscilloscope à mémoire Hameg HM 507 Les réglages matériels généraux de l oscilloscope Hameg HM 507 Ce sont les réglages qui sont actifs aussi bien en mode Analogique (oscilloscope
Animation pédagogique sur l oscilloscope à mémoire Hameg HM 507 Les réglages matériels généraux de l oscilloscope Hameg HM 507 Ce sont les réglages qui sont actifs aussi bien en mode Analogique (oscilloscope
REALISATION d'un. ORDONNANCEUR à ECHEANCES
 REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
ASR1 TD7 : Un microprocesseur RISC 16 bits
 {Â Ö Ñ º ØÖ Ý,È ØÖ ºÄÓ Ù,Æ ÓÐ ºÎ ÝÖ Ø¹ ÖÚ ÐÐÓÒ} Ò ¹ÐÝÓÒº Ö ØØÔ»»Ô Ö Óº Ò ¹ÐÝÓÒº Ö» Ö Ñ º ØÖ Ý»¼ Ö½» ASR1 TD7 : Un microprocesseur RISC 16 bits 13, 20 et 27 novembre 2006 Présentation générale On choisit
{Â Ö Ñ º ØÖ Ý,È ØÖ ºÄÓ Ù,Æ ÓÐ ºÎ ÝÖ Ø¹ ÖÚ ÐÐÓÒ} Ò ¹ÐÝÓÒº Ö ØØÔ»»Ô Ö Óº Ò ¹ÐÝÓÒº Ö» Ö Ñ º ØÖ Ý»¼ Ö½» ASR1 TD7 : Un microprocesseur RISC 16 bits 13, 20 et 27 novembre 2006 Présentation générale On choisit
Chapitre 4 : Exclusion mutuelle
 Chapitre 4 : Exclusion mutuelle Pierre Gançarski Juillet 2004 Ce support de cours comporte un certain nombre d erreurs : je décline toute responsabilité quant à leurs conséquences sur le déroulement des
Chapitre 4 : Exclusion mutuelle Pierre Gançarski Juillet 2004 Ce support de cours comporte un certain nombre d erreurs : je décline toute responsabilité quant à leurs conséquences sur le déroulement des
Université de La Rochelle. Réseaux TD n 6
 Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
RÉALISATION ET MISE AU POINT D UN SYSTÈME DE TÉLÉSURVEILLANCE VIDÉO
 E.N.S.E.R.B. Romain COMBELAS Frédéric BONNIN 3ème année. Option TIC MÉMOIRE DE FIN D ÉTUDES RÉALISATION ET MISE AU POINT D UN SYSTÈME DE TÉLÉSURVEILLANCE VIDÉO Encadré par : M. Patrice KADIONIK M. Yannick
E.N.S.E.R.B. Romain COMBELAS Frédéric BONNIN 3ème année. Option TIC MÉMOIRE DE FIN D ÉTUDES RÉALISATION ET MISE AU POINT D UN SYSTÈME DE TÉLÉSURVEILLANCE VIDÉO Encadré par : M. Patrice KADIONIK M. Yannick
Quoi de neuf en LabVIEW FPGA 2010?
 Quoi de neuf en LabVIEW FPGA 2010? Yannick DEGLA Ingénieur d Application Fonctionnalités de LabVIEW FPGA 2010 Nœud d intégration d IP - Importer directement des fichiers.xco de Xilinx ou vos propres VHDL
Quoi de neuf en LabVIEW FPGA 2010? Yannick DEGLA Ingénieur d Application Fonctionnalités de LabVIEW FPGA 2010 Nœud d intégration d IP - Importer directement des fichiers.xco de Xilinx ou vos propres VHDL
Cours de Génie Logiciel
 Cours de Génie Logiciel Sciences-U Lyon Diagrammes UML (2) http://www.rzo.free.fr Pierre PARREND 1 Avril 2005 Sommaire Les Diagrammes UML Diagrammes de Collaboration Diagrammes d'etats-transitions Diagrammes
Cours de Génie Logiciel Sciences-U Lyon Diagrammes UML (2) http://www.rzo.free.fr Pierre PARREND 1 Avril 2005 Sommaire Les Diagrammes UML Diagrammes de Collaboration Diagrammes d'etats-transitions Diagrammes
3. SPÉCIFICATIONS DU LOGICIEL. de l'expression des besoins à la conception. Spécifications fonctionnelles Analyse fonctionnelle et méthodes
 PLAN CYCLE DE VIE D'UN LOGICIEL EXPRESSION DES BESOINS SPÉCIFICATIONS DU LOGICIEL CONCEPTION DU LOGICIEL LA PROGRAMMATION TESTS ET MISE AU POINT DOCUMENTATION CONCLUSION C.Crochepeyre Génie Logiciel Diapason
PLAN CYCLE DE VIE D'UN LOGICIEL EXPRESSION DES BESOINS SPÉCIFICATIONS DU LOGICIEL CONCEPTION DU LOGICIEL LA PROGRAMMATION TESTS ET MISE AU POINT DOCUMENTATION CONCLUSION C.Crochepeyre Génie Logiciel Diapason
ELP 304 : Électronique Numérique. Cours 1 Introduction
 ELP 304 : Électronique Numérique Cours 1 Introduction Catherine Douillard Dépt Électronique Les systèmes numériques : généralités (I) En électronique numérique, le codage des informations utilise deux
ELP 304 : Électronique Numérique Cours 1 Introduction Catherine Douillard Dépt Électronique Les systèmes numériques : généralités (I) En électronique numérique, le codage des informations utilise deux
Implémentation Matérielle des Services d un RTOS sur Circuit Reconfigurable
 Implémentation Matérielle des Services d un RTOS sur Circuit Reconfigurable Pierre Olivier*, Jalil Boukhobza*, Jean-Philippe Babau +, Damien Picard +, Stéphane Rubini + *Lab-STICC, + LISyC, Université
Implémentation Matérielle des Services d un RTOS sur Circuit Reconfigurable Pierre Olivier*, Jalil Boukhobza*, Jean-Philippe Babau +, Damien Picard +, Stéphane Rubini + *Lab-STICC, + LISyC, Université
Algorithmique des Systèmes Répartis Protocoles de Communications
 Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Dossier technique. Présentation du bus DMX et Utilisation des options EL13 / EL14 ERM AUTOMATISMES INDUSTRIELS 1 LE PROTOCOLE DMX 2
 ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : Contact@erm-automatismes.com 1
ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : Contact@erm-automatismes.com 1
LOGICIEL DC4D MONITOR
 THQtronic LOGICIEL DC4D MONITOR La communication entre PC et DC4D ne peut se faire qu à l aide du câble de liaison USB-TTL de FTDI référence TTL-232R-5V-AJ vendu en option. DC4D Monitor est la même application
THQtronic LOGICIEL DC4D MONITOR La communication entre PC et DC4D ne peut se faire qu à l aide du câble de liaison USB-TTL de FTDI référence TTL-232R-5V-AJ vendu en option. DC4D Monitor est la même application
Langage propre à Oracle basé sur ADA. Offre une extension procédurale à SQL
 Cours PL/SQL Langage propre à Oracle basé sur ADA Offre une extension procédurale à SQL PL/SQL permet d utiliser un sous-ensemble du langage SQL des variables, des boucles, des alternatives, des gestions
Cours PL/SQL Langage propre à Oracle basé sur ADA Offre une extension procédurale à SQL PL/SQL permet d utiliser un sous-ensemble du langage SQL des variables, des boucles, des alternatives, des gestions
Réplication des données
 Réplication des données Christelle Pierkot FMIN 306 : Gestion de données distribuées Année 2009-2010 Echange d information distribuée Grâce à un serveur central Une seule copie cohérente Accès à distance
Réplication des données Christelle Pierkot FMIN 306 : Gestion de données distribuées Année 2009-2010 Echange d information distribuée Grâce à un serveur central Une seule copie cohérente Accès à distance
CAISSE ENREGISTREUSE ELECTRONIQUE SE-G1 MANUEL SIMPLIFIE DE L UTILISATEUR 20/03/14
 CAISSE ENISTREUSE ELECTRONIQUE SE-G1 MANUEL SIMPLIFIE DE L UTILISATEUR 20/03/14 SOMMAIRE 1. Installation du rouleau de papier... 3 2. Position de clé... 3 3. Présentation des touches d utilisation... 4
CAISSE ENISTREUSE ELECTRONIQUE SE-G1 MANUEL SIMPLIFIE DE L UTILISATEUR 20/03/14 SOMMAIRE 1. Installation du rouleau de papier... 3 2. Position de clé... 3 3. Présentation des touches d utilisation... 4
Hiérarchie matériel dans le monde informatique. Architecture d ordinateur : introduction. Hiérarchie matériel dans le monde informatique
 Architecture d ordinateur : introduction Dimitri Galayko Introduction à l informatique, cours 1 partie 2 Septembre 2014 Association d interrupteurs: fonctions arithmétiques élémentaires Elément «NON» Elément
Architecture d ordinateur : introduction Dimitri Galayko Introduction à l informatique, cours 1 partie 2 Septembre 2014 Association d interrupteurs: fonctions arithmétiques élémentaires Elément «NON» Elément
Atelier C TIA Portal CTIA06 : programmation des automates S7-300 Blocs d organisation
 Atelier C TIA Portal CTIA06 : programmation des automates S7-300 Blocs d organisation CTIA06 Page 1 1. Types de blocs de programme L automate met à disposition différents types de blocs qui contiennent
Atelier C TIA Portal CTIA06 : programmation des automates S7-300 Blocs d organisation CTIA06 Page 1 1. Types de blocs de programme L automate met à disposition différents types de blocs qui contiennent
Initiation à LabView : Les exemples d applications :
 Initiation à LabView : Les exemples d applications : c) Type de variables : Créer un programme : Exemple 1 : Calcul de c= 2(a+b)(a-3b) ou a, b et c seront des réels. «Exemple1» nom du programme : «Exemple
Initiation à LabView : Les exemples d applications : c) Type de variables : Créer un programme : Exemple 1 : Calcul de c= 2(a+b)(a-3b) ou a, b et c seront des réels. «Exemple1» nom du programme : «Exemple
CONFIGURATION DE L AUTOMATE SIEMENS
 CONFIGURATION DE L AUTOMATE SIEMENS Créer un projet Dans le bureau de Windows, double-cliquer sur l icône «SIMATIC Manager» : Cliquer ensuite sur l icône «nouveau» : Choisir un nom de projet et valider
CONFIGURATION DE L AUTOMATE SIEMENS Créer un projet Dans le bureau de Windows, double-cliquer sur l icône «SIMATIC Manager» : Cliquer ensuite sur l icône «nouveau» : Choisir un nom de projet et valider
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
Document de formation pour une solution complète d automatisation Totally Integrated Automation (T I A) MODULE A5 Programmation de la CPU 314C-2DP
 MODULE A5 Programmation de la CPU 314C-2DP") Document de formation pour une solution complète d automatisation Totally Integrated Automation (T I A) MODULE A5 Document de formation T I A Page 1 sur 23 Module A5 Ce document a été édité par Siemens
Document de formation pour une solution complète d automatisation Totally Integrated Automation (T I A) MODULE A5 Document de formation T I A Page 1 sur 23 Module A5 Ce document a été édité par Siemens
Chapitre 4 : Les mémoires
 1. Introduction: Chapitre 4 : Les mémoires Nous savons que dans un ordinateur toutes les informations : valeur numérique, instruction, adresse, symbole (chiffre, lettre,... etc.) sont manipulées sous une
1. Introduction: Chapitre 4 : Les mémoires Nous savons que dans un ordinateur toutes les informations : valeur numérique, instruction, adresse, symbole (chiffre, lettre,... etc.) sont manipulées sous une
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Éléments d informatique Cours 3 La programmation structurée en langage C L instruction de contrôle if
 Éléments d informatique Cours 3 La programmation structurée en langage C L instruction de contrôle if Pierre Boudes 28 septembre 2011 This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike
Éléments d informatique Cours 3 La programmation structurée en langage C L instruction de contrôle if Pierre Boudes 28 septembre 2011 This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike
Créer une base de données vidéo sans programmation (avec Drupal)
") Créer une base de données vidéo sans programmation (avec Drupal) 10.10.2013 Nicolas Bugnon (nicolas.bugnon@alliancesud.ch) Centre de documentation Alliance Sud www.alliancesud.ch Résultat de l atelier
Créer une base de données vidéo sans programmation (avec Drupal) 10.10.2013 Nicolas Bugnon (nicolas.bugnon@alliancesud.ch) Centre de documentation Alliance Sud www.alliancesud.ch Résultat de l atelier
Mini_guide_Isis.pdf le 23/09/2001 Page 1/14
 1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
Auto formation à Zelio logic
 Auto formation à Zelio logic 1 Les Produits Félicitations, vous avez choisi l'un des produits Zelio 2 suivants : 2 Environnement Le Zelio Logic est programmable à l'aide du logiciel Zelio Soft ou en Saisie
Auto formation à Zelio logic 1 Les Produits Félicitations, vous avez choisi l'un des produits Zelio 2 suivants : 2 Environnement Le Zelio Logic est programmable à l'aide du logiciel Zelio Soft ou en Saisie
Révision salariale - Manager
 Révision salariale - Manager Version : V1.0, mise à jour le 29/07/2014 Légende : 1 Information Points d attention Etapes Astuces De quoi s agit-il? VITALIS a pour vocation de permettre et faciliter la
Révision salariale - Manager Version : V1.0, mise à jour le 29/07/2014 Légende : 1 Information Points d attention Etapes Astuces De quoi s agit-il? VITALIS a pour vocation de permettre et faciliter la
Le signal GPS. Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz
 Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
Architecture des ordinateurs
 Architecture des ordinateurs Cours 4 5 novembre 2012 Archi 1/22 Micro-architecture Archi 2/22 Intro Comment assembler les différents circuits vus dans les cours précédents pour fabriquer un processeur?
Architecture des ordinateurs Cours 4 5 novembre 2012 Archi 1/22 Micro-architecture Archi 2/22 Intro Comment assembler les différents circuits vus dans les cours précédents pour fabriquer un processeur?
Master d'informatique 1ère année Réseaux et protocoles. Couche physique
 Master d'informatique 1ère année Réseaux et protocoles Couche physique Bureau S3-354 Mailto:Jean.Saquet@unicaen.fr http://saquet.users.greyc.fr/m1/rezopro Supports de communication Quelques exemples :
Master d'informatique 1ère année Réseaux et protocoles Couche physique Bureau S3-354 Mailto:Jean.Saquet@unicaen.fr http://saquet.users.greyc.fr/m1/rezopro Supports de communication Quelques exemples :
Contrôle d accès UTIL TP N 1 découverte
 Contrôle d accès UTIL TP N 1 découverte A partir de : Documents sur CD TIL : \CD usesame\documentations\produits_til\modules\util_tillys fpr_utilv2.pdf FTe_UTiL_V2.pdf UTiL2_express.pdf \CD usesame\documentations\logiciels_til\tilman
Contrôle d accès UTIL TP N 1 découverte A partir de : Documents sur CD TIL : \CD usesame\documentations\produits_til\modules\util_tillys fpr_utilv2.pdf FTe_UTiL_V2.pdf UTiL2_express.pdf \CD usesame\documentations\logiciels_til\tilman
Module Administration BD Chapitre 1 : Surcouche procédurale dans les SGBDS
 Module Administration BD Chapitre 1 : Surcouche procédurale dans les SGBDS 1. Introduction Nous allons aborder la notion de surcouche procédurale au sein des SGBDS relationnels tels que Oracle (PLSQL)
Module Administration BD Chapitre 1 : Surcouche procédurale dans les SGBDS 1. Introduction Nous allons aborder la notion de surcouche procédurale au sein des SGBDS relationnels tels que Oracle (PLSQL)
Description d'une liaison
 escription d'une liaison I. Constitution d'une liaison...2 II. Modes d'exploitation...2 III. Normalisation des jonctions...2 III.1. Norme V28 (RS232) 3 III.2. Norme V11 (RS422 et RS485) 4 IV. Liaison V24
escription d'une liaison I. Constitution d'une liaison...2 II. Modes d'exploitation...2 III. Normalisation des jonctions...2 III.1. Norme V28 (RS232) 3 III.2. Norme V11 (RS422 et RS485) 4 IV. Liaison V24
SECURIT GSM Version 2
 EOLE informatique SECURIT GSM Version 2 Notice d installation & Guide utilisateur Eole informatique 42 rue Claude Decaen -75012 Paris Tél. 01.43.43.00.97 www.eole-informatique.com 15/03/2006 SOMMAIRE Notice
EOLE informatique SECURIT GSM Version 2 Notice d installation & Guide utilisateur Eole informatique 42 rue Claude Decaen -75012 Paris Tél. 01.43.43.00.97 www.eole-informatique.com 15/03/2006 SOMMAIRE Notice
BeSpoon et l homme Connecté
 BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
France SMS+ MT Premium Description
 France SMS+ MT Premium Description Summary Subscription : kinematics Subscription via SMS (Kinematic + messages) Subscription via Wap (Kinematic + messages) Subscription via Mix SMS / WAP Subscription
France SMS+ MT Premium Description Summary Subscription : kinematics Subscription via SMS (Kinematic + messages) Subscription via Wap (Kinematic + messages) Subscription via Mix SMS / WAP Subscription
La carte à puce. Jean-Philippe Babau
 La carte à puce Jean-Philippe Babau Département Informatique INSA Lyon Certains éléments de cette présentation sont issus de documents Gemplus Research Group 1 Introduction Carte à puce de plus en plus
La carte à puce Jean-Philippe Babau Département Informatique INSA Lyon Certains éléments de cette présentation sont issus de documents Gemplus Research Group 1 Introduction Carte à puce de plus en plus
Probabilités. Rappel : trois exemples. Exemple 2 : On dispose d un dé truqué. On sait que : p(1) = p(2) =1/6 ; p(3) = 1/3 p(4) = p(5) =1/12
 = p(2) =1/6 ; p(3) = 1/3 p(4) = p(5) =1/12") Probabilités. I - Rappel : trois exemples. Exemple 1 : Dans une classe de 25 élèves, il y a 16 filles. Tous les élèves sont blonds ou bruns. Parmi les filles, 6 sont blondes. Parmi les garçons, 3 sont
Probabilités. I - Rappel : trois exemples. Exemple 1 : Dans une classe de 25 élèves, il y a 16 filles. Tous les élèves sont blonds ou bruns. Parmi les filles, 6 sont blondes. Parmi les garçons, 3 sont
1 Mesure de la performance d un système temps réel : la gigue
 TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
Cours 1 : Introduction Ordinateurs - Langages de haut niveau - Application
 Université de Provence Licence Math-Info Première Année V. Phan Luong Algorithmique et Programmation en Python Cours 1 : Introduction Ordinateurs - Langages de haut niveau - Application 1 Ordinateur Un
Université de Provence Licence Math-Info Première Année V. Phan Luong Algorithmique et Programmation en Python Cours 1 : Introduction Ordinateurs - Langages de haut niveau - Application 1 Ordinateur Un
Cours Programmation Système
 Cours Programmation Système Filière SMI Semestre S6 El Mostafa DAOUDI Département de Mathématiques et d Informatique, Faculté des Sciences Université Mohammed Premier Oujda m.daoudi@fso.ump.ma Février
Cours Programmation Système Filière SMI Semestre S6 El Mostafa DAOUDI Département de Mathématiques et d Informatique, Faculté des Sciences Université Mohammed Premier Oujda m.daoudi@fso.ump.ma Février
Transmissions série et parallèle
 1. Introduction : Un signal numérique transmet généralement plusieurs digits binaires. Exemple : 01000001 ( huit bits). Dans une transmission numérique on peut envisager deux modes : les envoyer tous en
1. Introduction : Un signal numérique transmet généralement plusieurs digits binaires. Exemple : 01000001 ( huit bits). Dans une transmission numérique on peut envisager deux modes : les envoyer tous en
6.5.2 Reset_Scénario... 11 6.5.3 Démarrage_Zibase... 11 6.6 Mise sous alarme, surveillance... 11 6.6.1 Eclairage Allée Temp... 11 6.6.
 Table des matières 1. Définition des besoins... 4 1.1 Monitoring... 4 1.2 Actions... 4 1.3 Alertes... 4 2. Modules et capteurs actuels... 4 2.1 Les actionneurs type lampes... 4 2.2 Les actionneurs type
Table des matières 1. Définition des besoins... 4 1.1 Monitoring... 4 1.2 Actions... 4 1.3 Alertes... 4 2. Modules et capteurs actuels... 4 2.1 Les actionneurs type lampes... 4 2.2 Les actionneurs type
Cours de Programmation en Langage Synchrone SIGNAL. Bernard HOUSSAIS IRISA. Équipe ESPRESSO
 Cours de Programmation en Langage Synchrone SIGNAL Bernard HOUSSAIS IRISA. Équipe ESPRESSO 24 septembre 2004 TABLE DES MATIÈRES 3 Table des matières 1 Introduction 5 1.1 La Programmation Temps Réel.........................
Cours de Programmation en Langage Synchrone SIGNAL Bernard HOUSSAIS IRISA. Équipe ESPRESSO 24 septembre 2004 TABLE DES MATIÈRES 3 Table des matières 1 Introduction 5 1.1 La Programmation Temps Réel.........................
Paris Airports - Web API Airports Path finding
 Paris Airports - Web API Airports Path finding Hackathon A660 Version Version Date writer Comment 1.0 19/05/2015 Olivier MONGIN Document creation Rédacteur : Olivier.MONGIN@adp.fr Date : 19/05/2015 Approbateur
Paris Airports - Web API Airports Path finding Hackathon A660 Version Version Date writer Comment 1.0 19/05/2015 Olivier MONGIN Document creation Rédacteur : Olivier.MONGIN@adp.fr Date : 19/05/2015 Approbateur
Document de spécification du logiciel VALPO Définition du format des fichiers des
 Document de spécification du logiciel VALPO Définition du format des fichiers des scénarios TELECOM Bretagne Projet VALPO - Démonstrateur de protocoles GSM/UMTS Département Réseaux, Sécurité, Multimédia
Document de spécification du logiciel VALPO Définition du format des fichiers des scénarios TELECOM Bretagne Projet VALPO - Démonstrateur de protocoles GSM/UMTS Département Réseaux, Sécurité, Multimédia
Mesures et incertitudes
 En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
Les fonctions logiques
 1 Les fonctions logiques Le fonctionnement des ordinateurs tout comme d autres appareils électroniques repose sur l emploi des circuits électroniques de logique binaire ou électronique numérique. Dans
1 Les fonctions logiques Le fonctionnement des ordinateurs tout comme d autres appareils électroniques repose sur l emploi des circuits électroniques de logique binaire ou électronique numérique. Dans
CHAPITRE VI ALEAS. 6.1.Généralités.
 CHAPITRE VI ALEAS 6.1.Généralités. Lors de la synthèse des systèmes logique (combinatoires ou séquentiels), nous avons supposé, implicitement, qu une même variable secondaire avait toujours la même valeur
CHAPITRE VI ALEAS 6.1.Généralités. Lors de la synthèse des systèmes logique (combinatoires ou séquentiels), nous avons supposé, implicitement, qu une même variable secondaire avait toujours la même valeur
Propagation sur réseau statique et dynamique
 Université de la Méditerranée UFR Sciences de Luminy Rapport de stage informatique pour le Master 2 de Physique, Parcours Physique Théorique et Mathématique, Physique des Particules et Astroparticules.
Université de la Méditerranée UFR Sciences de Luminy Rapport de stage informatique pour le Master 2 de Physique, Parcours Physique Théorique et Mathématique, Physique des Particules et Astroparticules.
Manuel d utilisation de la plate-forme de gestion de parc UCOPIA. La mobilité à la hauteur des exigences professionnelles
 Manuel d utilisation de la plate-forme de gestion de parc UCOPIA La mobilité à la hauteur des exigences professionnelles 2 Manuel d utilisation de la plate-forme de gestion de parc UCOPIA 1 Table des matières
Manuel d utilisation de la plate-forme de gestion de parc UCOPIA La mobilité à la hauteur des exigences professionnelles 2 Manuel d utilisation de la plate-forme de gestion de parc UCOPIA 1 Table des matières
La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS
 Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
lundi 3 août 2009 Choose your language What is Document Connection for Mac? Communautés Numériques L informatique à la portée du Grand Public
 Communautés Numériques L informatique à la portée du Grand Public Initiation et perfectionnement à l utilisation de la micro-informatique Microsoft Document Connection pour Mac. Microsoft Document Connection
Communautés Numériques L informatique à la portée du Grand Public Initiation et perfectionnement à l utilisation de la micro-informatique Microsoft Document Connection pour Mac. Microsoft Document Connection
Partie 7 : Gestion de la mémoire
 INF3600+INF2610 Automne 2006 Partie 7 : Gestion de la mémoire Exercice 1 : Considérez un système disposant de 16 MO de mémoire physique réservée aux processus utilisateur. La mémoire est composée de cases
INF3600+INF2610 Automne 2006 Partie 7 : Gestion de la mémoire Exercice 1 : Considérez un système disposant de 16 MO de mémoire physique réservée aux processus utilisateur. La mémoire est composée de cases
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Cette application développée en C# va récupérer un certain nombre d informations en ligne fournies par la ville de Paris :
 Développement d un client REST, l application Vélib 1. Présentation L application présentée permet de visualiser les disponibilités des vélos et des emplacements de parking à la disposition des parisiens
Développement d un client REST, l application Vélib 1. Présentation L application présentée permet de visualiser les disponibilités des vélos et des emplacements de parking à la disposition des parisiens
Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs
 DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
DIVAS Analyse des trajectoires acceptables en approche de virage assistance aux conducteurs N 3.C.1 Décembre 2008 Projet financé par l Agence Nationale de la Recherche Responsable : S. Espié Projet ANR
Durée estimée :1 journée Date de la réalisation : 2011. Description Fournisseur Référence Nombre PU HT LM35CZ, LM35AZ LM35DZ
 001 Titre : Mesure de température interfacée par carte Arduino Type de réalisation : montage électronique, de surveillance de température Concepteur : C. Rouviere Coordonnées : Laboratoire lbv villefranche/mer
001 Titre : Mesure de température interfacée par carte Arduino Type de réalisation : montage électronique, de surveillance de température Concepteur : C. Rouviere Coordonnées : Laboratoire lbv villefranche/mer
Encryptions, compression et partitionnement des données
 Encryptions, compression et partitionnement des données Version 1.0 Grégory CASANOVA 2 Compression, encryption et partitionnement des données Sommaire 1 Introduction... 3 2 Encryption transparente des
Encryptions, compression et partitionnement des données Version 1.0 Grégory CASANOVA 2 Compression, encryption et partitionnement des données Sommaire 1 Introduction... 3 2 Encryption transparente des
SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION. Contenu du dossier :
 DOSSIER DE PRESENTATION. Contenu du dossier :") SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION Contenu du dossier : 1. PRESENTATION DU SYSTEME DE PALPAGE A TRANSMISSION RADIO....1 1.1. DESCRIPTION DU FABRICANT....1
SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION Contenu du dossier : 1. PRESENTATION DU SYSTEME DE PALPAGE A TRANSMISSION RADIO....1 1.1. DESCRIPTION DU FABRICANT....1
Il se peut que le produit livré diffère de l illustration.
 1 Températures ambiantes min. / max. +0 C / +50 C Indice de protection IP65 Tension de service des équipements électroniques 24 V CC Tolérance de tension de l électronique -15% / +20% Tension de service
1 Températures ambiantes min. / max. +0 C / +50 C Indice de protection IP65 Tension de service des équipements électroniques 24 V CC Tolérance de tension de l électronique -15% / +20% Tension de service
Les portes logiques. Voici les symboles des trois fonctions de base. Portes AND. Portes OR. Porte NOT
 Les portes logiques Nous avons jusqu ici utilisé des boutons poussoirs et une lampe pour illustrer le fonctionnement des opérateurs logiques. En électronique digitale, les opérations logiques sont effectuées
Les portes logiques Nous avons jusqu ici utilisé des boutons poussoirs et une lampe pour illustrer le fonctionnement des opérateurs logiques. En électronique digitale, les opérations logiques sont effectuées
Conception et réalisation d'une pédale MIDI
 Conception et réalisation d'une pédale MIDI Origine et historique du projet: Plusieurs dizaines de lycéens de Porto-Vecchio adhèrent au club musique du foyer socio-éducatif et se retrouvent à l'heure du
Conception et réalisation d'une pédale MIDI Origine et historique du projet: Plusieurs dizaines de lycéens de Porto-Vecchio adhèrent au club musique du foyer socio-éducatif et se retrouvent à l'heure du