Régulation par PID Mickaël CAMUS Etienne DEGUINE Daniel ROSS
|
|
|
- Flavie Adèle Meloche
- il y a 8 ans
- Total affichages :
Transcription
1 Régulation par PID Mickaël CAMUS Etienne DEGUINE Daniel ROSS 26/02/10

2 Plan Définition 1. Proportionnel 2. Intégral 3. Dérivé Réglages des coefficients 1. Différentes approches 2. Ziegler-Nichols 3. Process Reaction Problèmes & Limites 1. Écrêtage 2. Dérivé 3. Double PID Réalisation pratique page 2

3 Plan Définition 1. Proportionnel 2. Intégral 3. Dérivé Réglages des coefficients 1. Différentes approches 2. Ziegler-Nichols 3. Process Reaction Problèmes & Limites 1. Écrêtage 2. Dérivé 3. Double PID Réalisation pratique page 3

4 Définition Régulateur PID (Proportionnel, Intégral, Dérivé) C'est un système d'auto régulation (boucle fermée), qui cherche à réduire l'erreur entre la consigne et la mesure. page 4

5 À quoi ça sert? Atteindre la valeur souhaitée pour une des variables du système (vitesse, position,...) Régulation : minimiser rapidement les perturbations Poursuite : s'adapter rapidement aux nouvelles consignes. Ceci s'appelle l'asservissement page 5
 Régulation : minimiser rapidement les perturbations")
6 Proportionnel L'erreur est multipliée par une constante Kp Plus Kp est grand, plus la réponse est rapide Erreur statique page 6

7 Proportionnel Wikipédia page 7

8 Intégral L'erreur est intégrée sur un intervalle de temps, puis multipliée par une constante Ki Corrige l'erreur statique Plus Ki est élevé, plus l'erreur statique est corrigée page 8

9 Intégral Wikipédia page 9

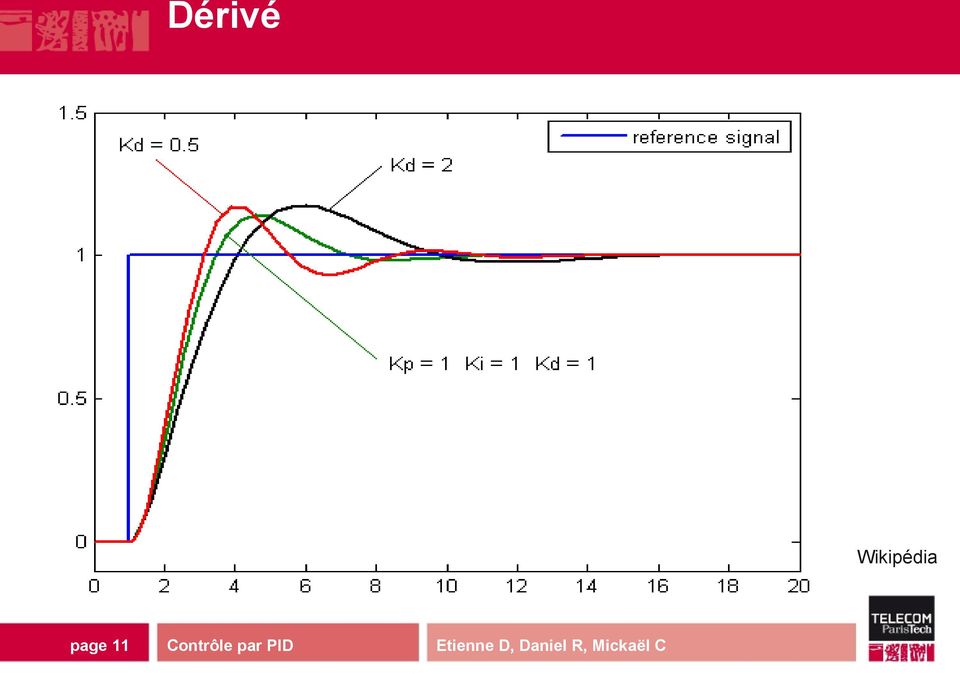
10 Dérivé L'erreur est dérivée par rapport au temps, puis multipliée par une constante Kd Réduit le dépassement et le temps de stabilisation Sensible au bruit page 10

11 Dérivé Wikipédia page 11
12 Résumé Coefficient Temps de montée Temps de stabilisation Dépassement Erreur Statique Kp Diminue Augmente Augmente Diminue Ki Diminue Augmente Augmente Annule Kd _ Diminue Diminue - Source [7] page 12

13 Plan Définition 1. Proportionnel 2. Intégral 3. Dérivé Réglages des coefficients 1. Différentes approches 2. Ziegler-Nichols 3. Process Reaction Problèmes & Limites 1. Écrêtage 2. Dérivé 3. Double PID Réalisation pratique page 13

14 Réglage des coefficients Le réglage des coefficients peut se faire selon deux approches : modélisation expérimentation Dépend des contraintes : difficulté de modélisation accès au système possibilité de mettre le système "offline" page 14

15 Approche par la modélisation Cas d'utilisation : systèmes simples, exemple : moteur électrique systèmes dangereux, permet d'avoir une première idée des coefficients, exemple : systèmes chimiques Etude de cas le moteur électrique : Source [7] page 15

16 Approche expérimentale Ziegler-Nichols : systèmes en boucle fermée (déjà régulés). Principe : Amener le système à un état d'oscillation puis en déduire les valeurs des coefficients via un calcul simple Process Reaction Method aussi appelé Ziegler- Nichols en boucle ouverte. Principe : Enregistrer la réponse du système non régulé à un échelon puis en déduire la valeur des coefficients par analyse de la réponse (ie "lecture graphique") page 16

17 Ziegler-Nichols Protocole Protocole : Mettre Ki et Kd à 0, faire varier Kp jusqu'à obtenir des oscillations périodiques non amorties et non amplifiées Illustration : source [1] On note Ku = Kp_oscillations, Pu la période d'oscillations Alors on met Kp= Ku/1.7, Ki=Pu/2, Kd=Pu/8 Ces valeurs ont été obtenues par expérimentation par Z et N, elles correspondent à un système dans lequel les oscillations sont divisées par 1/4 à chaque pseudo-période. page 17

18 Ziegler-Nichols +/- Avantages Facile à mettre en oeuvre ( physiquement et au point de vue calcul ) Testé sur le système en production, correspond à la réalité, peut être faite à la volée si les caractéristiques du système sont modifiées ( usure, changement de l'environnement ). Inconvénient Le système peut devenir instable ou passer dans des états dangereux ( chimie ) Peut prendre beaucoup de temps si le système réagit très lentement ( jours, semaines en chimie). Heureusement pour les systèmes qui nous concernent (moteurs), ce n'est pas un problème si on limite les tensions/intensités d'alimentation. page 18
.")
19 Process Reaction Method - Protocole Protocole : On applique un créneau au système et on enregistre sa réponse. On pose : On a alors : Illustration : source [1] page 19

20 Process Reaction Method - +/- Avantages Ne nécessite pas d'avoir un système déjà asservi, ni de deviner de valeur pour Kp Inconvénients Nécessite plus de matériel : enregistrement d'une courbe de réponse. Nécessite de mettre le système "offline" Si la réponse du système est trop différente de la réponse montrée ci-dessus, cette méthode donne des valeurs pas forcément adaptées. page 20

21 Conclusion sur le réglage des coefficients Conclusion : Les méthodes expérimentales présentées permettent d'avoir de bonnes estimations génériques pour un systèmes raisonnablement simple ( ie régulable par un PID! ). Cependant il faut continuer à faire varier les coefficients jusqu'à obtenir une réponse satisfaisant le cahier des charges. Pour cela on utilise les règles "simples" Kp augmente -> montée plus rapide mais plus de dépassement. Ki augmente -> montée plus rapide mais régime stationnaire plus long, erreur statique plus faible. Kd augmente -> diminue le dépassement et le temps d'établissement du régime stationnaire, mais augmente la sensibilité au bruit. page 21
22 Plan Définition 1.Proportionnel 2.Intégral 3.Dérivé Réglages des coefficients 1.Différentes approches 2.Ziegler-Nichols 3.Process Reaction Problèmes & Limites 1. Écrêtage 2. Dérivé 3. Double PID Réalisation pratique page 22
23 Problèmes et limites Caractéristiques matérielles & électriques : Vmax, Imax, Si PID.consigne_V > Vmax, alors PID.consigne_V = Vmax page 23
24 Problèmes et limites Action D du PID : très sensible au bruit [5] Plusieurs solutions : Filtre passe bas Simple asservissement PI page 24
25 Problèmes et limites Dans certains cas, on ne veut pas : D'oscillations De dépassement de valeur,... Exemple : On veut qu'un moteur atteigne une certaine position sans avoir à changer de sens de rotation Bras robotiques => Double asservissement : Vitesse Position page 25

26 Double PID Principe : on contrôle la vitesse à laquelle l'objet se déplace Typiquement : [6] Avantages : indépendant de la distance page 26

27 Problèmes et limites Mise de deux blocs d'asservissement à la suite : Asservissement alors possible en vitesse et position : on définit Kp', Ki', Kd' Dans le cas de l'asservissement en vitesse, on peut avoir un PI page 27
28 Problèmes et limites Résultat d'un double asservissement : [7] page 28
29 Plan Définition 1.Proportionnel 2.Intégral 3.Dérivé Réglages des coefficients 1.Différentes approches 2.Ziegler-Nichols 3.Process Reaction Problèmes & Limites 1.Écrêtage 2.Dérivé 3.Double PID Réalisation pratique page 29
30 Réalisation En pratique on peut utiliser deux types de contrôleurs PID : Contrôleur PID numérique (échantillonnage) Contrôleur PID analogique (mais de plus en plus souvent remplacés par des numériques) page 30
31 Conclusion Contrôleur PID : Simple Efficace dans la plupart des cas Le plus utilisé dans l'industrie Calcul des coefficients Méthode expérimentale simple Modèles plus compliqués Limites : Inefficace dans certains cas Linéaire donc problème avec des modèles non linéaires page 31
32 Bibliographie [1] The Michigan Open Control and Process Textbook : [2] Article du site Control Engineering [3] Cours Régulation, université de Caen, slides 47 à 50 [4] Automatique des Systèmes Continus. Éléments de cours et exercises résolus. by Christophe Sueur, Philippe Vanheeghe and Pierre Borne, chapitre 9 (bibliothèque INT Management) [5] L'asservissement PID : [6] Pilotage et asservissement de robot autonome : [7] Le PID utilisé en régulation de position et/ou de vitesse de moteurs électriques, Christophe Le Lann 2007, Practical Process Content : page 32
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.
 PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
Rapport de projet de fin d étude
 Rapport de projet de fin d étude Réalisé Par : Encadré Par : -Soumya sekhsokh Mohammed RABI -Kawtar oukili Année Universitaire 2010/2011 ETUDE D UNE BOUCLE DE REGULATION DE NIVEAU : - IMPLEMENTATION DU
Rapport de projet de fin d étude Réalisé Par : Encadré Par : -Soumya sekhsokh Mohammed RABI -Kawtar oukili Année Universitaire 2010/2011 ETUDE D UNE BOUCLE DE REGULATION DE NIVEAU : - IMPLEMENTATION DU
Régulation automatique: tentative de définition
 Table des matières Introduction à la régulation automatique (notes de cours) o Régulation automatique: tentative de définition o Exemples introductifs Régulation automatique de température Régulation automatique
Table des matières Introduction à la régulation automatique (notes de cours) o Régulation automatique: tentative de définition o Exemples introductifs Régulation automatique de température Régulation automatique
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
EQUIPEMENTS ELECTRONIQUES : MAINTENANCE
 MINISTERE DE LA COMMUNAUTE FRANCAISE ADMINISTRATION GENERALE DE L ENSEIGNEMENT ET DE LA RECHERCHE SCIENTIFIQUE ENSEIGNEMENT DE PROMOTION SOCIALE DE REGIME 1 DOSSIER PEDAGOGIQUE UNITE DE FORMATION EQUIPEMENTS
MINISTERE DE LA COMMUNAUTE FRANCAISE ADMINISTRATION GENERALE DE L ENSEIGNEMENT ET DE LA RECHERCHE SCIENTIFIQUE ENSEIGNEMENT DE PROMOTION SOCIALE DE REGIME 1 DOSSIER PEDAGOGIQUE UNITE DE FORMATION EQUIPEMENTS
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
La régulation. Principe de régulation p. 2. La régulation PID p. 5. La régulation à modèle p. 12. Autres types de régulation p. 15
 Le magazine Schneider Electric de l'enseignement technologique et professionnel Juin 2004 La régulation Principe de régulation p. 2 La régulation PID p. 5 La régulation est au cœur de toutes nos actions
Le magazine Schneider Electric de l'enseignement technologique et professionnel Juin 2004 La régulation Principe de régulation p. 2 La régulation PID p. 5 La régulation est au cœur de toutes nos actions
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
L efficience énergétique...
 ......Une technique intelligente de régulation au service Edgar Mayer Product Manager CentraLine c/o Honeywell GmbH 02 I 2009 Grâce aux techniques de régulation intelligentes d aujourd hui, il est possible
......Une technique intelligente de régulation au service Edgar Mayer Product Manager CentraLine c/o Honeywell GmbH 02 I 2009 Grâce aux techniques de régulation intelligentes d aujourd hui, il est possible
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
Thermorégulateurs Series 5 et Series 4. Exciting technology!
 Thermorégulateurs Series 5 et Series 4 Exciting technology! surveillance entièrement automatique du process menu interactif multilingue circuit fermé à l'abri du contact avec l'oxygène de l'air refroidissement
Thermorégulateurs Series 5 et Series 4 Exciting technology! surveillance entièrement automatique du process menu interactif multilingue circuit fermé à l'abri du contact avec l'oxygène de l'air refroidissement
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Métiers d études, recherche & développement dans l industrie
 Les fiches Métiers de l Observatoire du Travail Temporaire Emploi, compétences et trajectoires d intérimaires cadres Métiers d études, recherche & développement dans l industrie R&D Production Ingénieur
Les fiches Métiers de l Observatoire du Travail Temporaire Emploi, compétences et trajectoires d intérimaires cadres Métiers d études, recherche & développement dans l industrie R&D Production Ingénieur
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
jeudi 19 septembre 2013, Bournezeau Services et Solutions en Carrière
 jeudi 19 septembre 2013, Bournezeau Services et Solutions en Carrière 1 Schneider Electric - le spécialiste mondial de la gestion de l énergie Des géographies équilibrées CA 2012 Milliards d euros de CA
jeudi 19 septembre 2013, Bournezeau Services et Solutions en Carrière 1 Schneider Electric - le spécialiste mondial de la gestion de l énergie Des géographies équilibrées CA 2012 Milliards d euros de CA
Spectrophotométrie. Spectrophotomètre CCD2. Réf : 701 606. Version 1.0. Français p 2. Version : 4105
 Réf : Version 1.0 Français p 2 Version : 4105 Spectrophotomètre CCD2 1 Avant-propos et description Chère cliente, cher client, nous vous félicitons d'avoir choisi notre Spectrophotomètre CCD2 pour réaliser
Réf : Version 1.0 Français p 2 Version : 4105 Spectrophotomètre CCD2 1 Avant-propos et description Chère cliente, cher client, nous vous félicitons d'avoir choisi notre Spectrophotomètre CCD2 pour réaliser
Etude des convertisseurs statiques continu-continu à résonance, modélisation dynamique
 Etude des convertisseurs statiques continucontinu à résonance, modélisation dynamique J.P. Ferrieux, J. Perard, E. Olivier To cite this version: J.P. Ferrieux, J. Perard, E. Olivier. Etude des convertisseurs
Etude des convertisseurs statiques continucontinu à résonance, modélisation dynamique J.P. Ferrieux, J. Perard, E. Olivier To cite this version: J.P. Ferrieux, J. Perard, E. Olivier. Etude des convertisseurs
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET
 GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET 1 Tianxiao LIU Licence Professionnelle Réseaux & Sécurité Université de Cergy-Pontoise http://depinfo.u-cergy.fr/~tliu/lpg.php PLAN Objectif et
GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET 1 Tianxiao LIU Licence Professionnelle Réseaux & Sécurité Université de Cergy-Pontoise http://depinfo.u-cergy.fr/~tliu/lpg.php PLAN Objectif et
Programmes Prioritaires Nationaux : Fumées de soudage. Y. CAROMEL - Contrôleur de sécurité
 Programmes Prioritaires Nationaux : Fumées de soudage Y. CAROMEL - Contrôleur de sécurité Règles essentielles de ventilation appliquées aux activités de soudage Y. CAROMEL - Contrôleur de sécurité Règles
Programmes Prioritaires Nationaux : Fumées de soudage Y. CAROMEL - Contrôleur de sécurité Règles essentielles de ventilation appliquées aux activités de soudage Y. CAROMEL - Contrôleur de sécurité Règles
IV - Programme détaillé par matière (1 fiche détaillée par matière)
") IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
Twincat PLC Temperature Controller. Régulation de Température à l aide de TwinCAT PLC.
 Twincat PLC Temperature Controller Régulation de Température à l aide de TwinCAT PLC. VERSION : 1.0 / JYL DATE : 28 Novembre 2005 1 Installation...4 2 Présentation :...4 3 Schéma fonctionnel :...5 4 Générateur
Twincat PLC Temperature Controller Régulation de Température à l aide de TwinCAT PLC. VERSION : 1.0 / JYL DATE : 28 Novembre 2005 1 Installation...4 2 Présentation :...4 3 Schéma fonctionnel :...5 4 Générateur
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Mémoire de Juin 2010. PID versus PFC
 Mémoire de Juin 21 PID versus PFC Joëlle.Mallet. IRA Jacques.Richalet. Guy Lavielle. Consultants Philippe.D.Perrichon - Sylvain.Girault. Sanofi-Aventis. Vitry sur Seine Introduction : L automatique industrielle
Mémoire de Juin 21 PID versus PFC Joëlle.Mallet. IRA Jacques.Richalet. Guy Lavielle. Consultants Philippe.D.Perrichon - Sylvain.Girault. Sanofi-Aventis. Vitry sur Seine Introduction : L automatique industrielle
Intérêt du découpage en sous-bandes pour l analyse spectrale
 Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Intérêt du découpage en sous-bandes pour l analyse spectrale David BONACCI Institut National Polytechnique de Toulouse (INP) École Nationale Supérieure d Électrotechnique, d Électronique, d Informatique,
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort
 Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
EL70x1 en mode position. Mise en œuvre rapide. VERSION : Beta / DATE : 31 Juillet 2011
 - EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
- EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Complément d information concernant la fiche de concordance
 Sommaire SAMEDI 0 DÉCEMBRE 20 Vous trouverez dans ce dossier les documents correspondants à ce que nous allons travailler aujourd hui : La fiche de concordance pour le DAEU ; Page 2 Un rappel de cours
Sommaire SAMEDI 0 DÉCEMBRE 20 Vous trouverez dans ce dossier les documents correspondants à ce que nous allons travailler aujourd hui : La fiche de concordance pour le DAEU ; Page 2 Un rappel de cours
Compression et Transmission des Signaux. Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette
 Compression et Transmission des Signaux Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette 1 De Shannon à Mac Donalds Mac Donalds 1955 Claude Elwood Shannon 1916 2001 Monsieur X 1951 2 Où
Compression et Transmission des Signaux Samson LASAULCE Laboratoire des Signaux et Systèmes, Gif/Yvette 1 De Shannon à Mac Donalds Mac Donalds 1955 Claude Elwood Shannon 1916 2001 Monsieur X 1951 2 Où
CHAPITRE 5 L AMORTISSEMENT DEGRESSIF
 CHAPITRE 5 L AMORTISSEMENT DEGRESSIF Afin de présenter les comptes annuels de la SARL MACCABI dont il est le comptable, M. Magee a commencé à réaliser, dés le 31/12, les travaux d inventaire. Il vous demande
CHAPITRE 5 L AMORTISSEMENT DEGRESSIF Afin de présenter les comptes annuels de la SARL MACCABI dont il est le comptable, M. Magee a commencé à réaliser, dés le 31/12, les travaux d inventaire. Il vous demande
Commande Prédictive. J. P. Corriou. LSGC-ENSIC-CNRS, Nancy. e-mail : corriou@ensic.inpl-nancy.fr
 Commande Prédictive J P Corriou LSGC-ENSIC-CNRS, Nancy e-mail : corriou@ensicinpl-nancyfr Ý Consigne Trajectoire de référence Ý Ö Réponse Ý Horizon de prédiction À Ô ¹ Ù ¹ Temps Entrée Ù Horizon de commande
Commande Prédictive J P Corriou LSGC-ENSIC-CNRS, Nancy e-mail : corriou@ensicinpl-nancyfr Ý Consigne Trajectoire de référence Ý Ö Réponse Ý Horizon de prédiction À Ô ¹ Ù ¹ Temps Entrée Ù Horizon de commande
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Introduction à l approche bootstrap
 Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
BTS Groupement A. Mathématiques Session 2011. Spécialités CIRA, IRIS, Systèmes électroniques, TPIL
 BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT
 TP CIRCUITS ELECTRIQUES R.DUPERRAY Lycée F.BUISSON PTSI CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT OBJECTIFS Savoir utiliser le multimètre pour mesurer des grandeurs électriques Obtenir expérimentalement
TP CIRCUITS ELECTRIQUES R.DUPERRAY Lycée F.BUISSON PTSI CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT OBJECTIFS Savoir utiliser le multimètre pour mesurer des grandeurs électriques Obtenir expérimentalement
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre.
 Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Equipement. électronique
 MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
Guide d application technique Correction du Facteur de Puissance. Solution en Compensation Facteur de puissance
 Guide d application technique Correction du Facteur de Puissance Solution en Compensation Facteur de puissance Solutions complètes dans la régulation de la Qualité de l onde Note : 4.1.2 Banques
Guide d application technique Correction du Facteur de Puissance Solution en Compensation Facteur de puissance Solutions complètes dans la régulation de la Qualité de l onde Note : 4.1.2 Banques
GENIE DES SYSTEMES INDUSTRIELS
 MASTER SCIENCES, TECHNOLOGIES, SANTE/STAPS GENIE DES SYSTEMES INDUSTRIELS Spécialité Risques Industriels et Maintenance www.univ-littoral.fr OBJECTIFS DE LA FORMATION L objectif du master régional GSI
MASTER SCIENCES, TECHNOLOGIES, SANTE/STAPS GENIE DES SYSTEMES INDUSTRIELS Spécialité Risques Industriels et Maintenance www.univ-littoral.fr OBJECTIFS DE LA FORMATION L objectif du master régional GSI
SIMATIC. Logiciel de base pour S7-300/400 Régulation PID. Avant-propos, sommaire. Introduction. Paramétrage. Blocs fonctionnels. Bibliographie.
 SIMATIC Logiciel de base pour S7-300/400 Avant-propos, sommaire Introduction 1 Paramétrage 2 Blocs fonctionnels 3 Bibliographie Index A Manuel Consignes de sécurité! Ce manuel contient des marques d avertissement
SIMATIC Logiciel de base pour S7-300/400 Avant-propos, sommaire Introduction 1 Paramétrage 2 Blocs fonctionnels 3 Bibliographie Index A Manuel Consignes de sécurité! Ce manuel contient des marques d avertissement
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
Observer TP Ondes CELERITE DES ONDES SONORES
 OBJECTIFS CELERITE DES ONDES SONORES Mesurer la célérité des ondes sonores dans l'air, à température ambiante. Utilisation d un oscilloscope en mode numérique Exploitation de l acquisition par régressif.
OBJECTIFS CELERITE DES ONDES SONORES Mesurer la célérité des ondes sonores dans l'air, à température ambiante. Utilisation d un oscilloscope en mode numérique Exploitation de l acquisition par régressif.
Intelligence Artificielle et Systèmes Multi-Agents. Badr Benmammar bbm@badr-benmammar.com
 Intelligence Artificielle et Systèmes Multi-Agents Badr Benmammar bbm@badr-benmammar.com Plan La première partie : L intelligence artificielle (IA) Définition de l intelligence artificielle (IA) Domaines
Intelligence Artificielle et Systèmes Multi-Agents Badr Benmammar bbm@badr-benmammar.com Plan La première partie : L intelligence artificielle (IA) Définition de l intelligence artificielle (IA) Domaines
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU
 $SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES fabien.figueres@mpsa.com 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES fabien.figueres@mpsa.com 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
Export vers le format WAV dans ArtemiS SUITE
 9/14 dans ArtemiS SUITE Export vers WAV dans le Projet 2 Réglage 2 Type de données et résolution 4 Export des informations d'impulsions tachymétriques 4 Fondu 5 Fichier Résultat 6 Paramètres pour l'export
9/14 dans ArtemiS SUITE Export vers WAV dans le Projet 2 Réglage 2 Type de données et résolution 4 Export des informations d'impulsions tachymétriques 4 Fondu 5 Fichier Résultat 6 Paramètres pour l'export
La température du filament mesurée et mémorisée par ce thermomètre Infra-Rouge(IR) est de 285 C. EST-CE POSSIBLE?
 est de 285 C. EST-CE POSSIBLE?") INVESTIGATION De nombreux appareils domestiques, convecteurs, chauffe-biberon, cafetière convertissent l énergie électrique en chaleur. Comment interviennent les grandeurs électriques, tension, intensité,
INVESTIGATION De nombreux appareils domestiques, convecteurs, chauffe-biberon, cafetière convertissent l énergie électrique en chaleur. Comment interviennent les grandeurs électriques, tension, intensité,
Calcul des pertes de pression et dimensionnement des conduits de ventilation
 Calcul des pertes de pression et dimensionnement des conduits de ventilation Applications résidentielles Christophe Delmotte, ir Laboratoire Qualité de l Air et Ventilation CSTC - Centre Scientifique et
Calcul des pertes de pression et dimensionnement des conduits de ventilation Applications résidentielles Christophe Delmotte, ir Laboratoire Qualité de l Air et Ventilation CSTC - Centre Scientifique et
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
ENSPS 3A ISAV Master ISTI AR. J. Gangloff
 Commande prédictive ENSPS 3A ISAV Master ISTI AR J. Gangloff Plan 1.Introduction / Historique 2.Modélisation du système 3.Fonction de coût 4.Équations de prédiction 5.Commande optimale 6.Exemples 7.Réglage
Commande prédictive ENSPS 3A ISAV Master ISTI AR J. Gangloff Plan 1.Introduction / Historique 2.Modélisation du système 3.Fonction de coût 4.Équations de prédiction 5.Commande optimale 6.Exemples 7.Réglage
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Catalogue - Formation en «électropneumatique et systèmes automatisés process control system»
 entre echnologies Avancées Catalogue - en «électropneumatique et systèmes automatisés process control system» 2012-2013 Boulevard du Château 12, 7800 ATH Tél : 068/26.88.80 Fax : 068/26.88.81 E-Mail :
entre echnologies Avancées Catalogue - en «électropneumatique et systèmes automatisés process control system» 2012-2013 Boulevard du Château 12, 7800 ATH Tél : 068/26.88.80 Fax : 068/26.88.81 E-Mail :
NOTICE DOUBLE DIPLÔME
 NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
Manuel DLCX Version 3.00 sept 2014
 EURODIEC 6 Rue de la commune de Paris Zone Indusrtielle 77370 NANGIS Manuel DLCX Version 3.00 sept 2014 Contrôleur d effort digital pour presse = Sommaire. Description...3 Les fonctionnalités du contrôleur
EURODIEC 6 Rue de la commune de Paris Zone Indusrtielle 77370 NANGIS Manuel DLCX Version 3.00 sept 2014 Contrôleur d effort digital pour presse = Sommaire. Description...3 Les fonctionnalités du contrôleur
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
MASTER PREVENTION DES RISQUES ET NUISANCES TECHNOLOGIQUES
 MASTER PREVENTION DES RISQUES ET NUISANCES TECHNOLOGIQUES 1 I. Les textes applicables Décret du 8 janvier 1965 modifié qui concerne les mesures de protection applicables aux établissements dont le personnel
MASTER PREVENTION DES RISQUES ET NUISANCES TECHNOLOGIQUES 1 I. Les textes applicables Décret du 8 janvier 1965 modifié qui concerne les mesures de protection applicables aux établissements dont le personnel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN)
") 1/5 Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN) Objectifs : Reconnaître des signaux de nature analogique et des signaux de nature numérique Mettre en
1/5 Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN) Objectifs : Reconnaître des signaux de nature analogique et des signaux de nature numérique Mettre en
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Chapitre 3 Les régimes de fonctionnement de quelques circuits linéaires
 Chapitre 3 Les régimes de fonctionnement de quelques circuits linéaires 25 Lechapitreprécédent avait pour objet l étude decircuitsrésistifsalimentéspar dessourcesde tension ou de courant continues. Par
Chapitre 3 Les régimes de fonctionnement de quelques circuits linéaires 25 Lechapitreprécédent avait pour objet l étude decircuitsrésistifsalimentéspar dessourcesde tension ou de courant continues. Par
TEST ET RÉGLAGE DES SUSPENSIONS
 TEST ET RÉGLAGE DES SUSPENSIONS Généralités En règle générale, toutes les suspensions pour les motos standard sont réglées pour un conducteur d'un poids moyen de 70 kg. Généralement, le poids moyen du
TEST ET RÉGLAGE DES SUSPENSIONS Généralités En règle générale, toutes les suspensions pour les motos standard sont réglées pour un conducteur d'un poids moyen de 70 kg. Généralement, le poids moyen du
Solutions de mesure et de contrôle
 Solutions de mesure et de contrôle Zelio RTC Catalogue Avril 0 Comment trouver les produits Automatismes et Contrôle Les catalogues Les Essentiels Des gammes complètes de produits Une sélection des produits
Solutions de mesure et de contrôle Zelio RTC Catalogue Avril 0 Comment trouver les produits Automatismes et Contrôle Les catalogues Les Essentiels Des gammes complètes de produits Une sélection des produits
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
CHAPITRE 1 : ETAT DE L ART.
 CHAPITRE 1 : ETAT DE L ART. 1. INTRODUCTION De nos jours, les machines tournantes sont de plus en plus performantes notamment en terme de rapport masse/puissance. Cela implique qu elles deviennent de plus
CHAPITRE 1 : ETAT DE L ART. 1. INTRODUCTION De nos jours, les machines tournantes sont de plus en plus performantes notamment en terme de rapport masse/puissance. Cela implique qu elles deviennent de plus
Erreur statique. Chapitre 6. 6.1 Définition
 Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Génie Industriel et Maintenance
 Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
NO-BREAK KS. Système UPS dynamique PRÉSENTATION
 NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
TP : Suivi d'une réaction par spectrophotométrie
 Nom : Prénom: n groupe: TP : Suivi d'une réaction par spectrophotométrie Consignes de sécurité de base: Porter une blouse en coton, pas de nu-pieds Porter des lunettes, des gants (en fonction des espèces
Nom : Prénom: n groupe: TP : Suivi d'une réaction par spectrophotométrie Consignes de sécurité de base: Porter une blouse en coton, pas de nu-pieds Porter des lunettes, des gants (en fonction des espèces
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Technique de codage des formes d'ondes
 Technique de codage des formes d'ondes Contenu Introduction Conditions préalables Conditions requises Composants utilisés Conventions Modulation par impulsions et codage Filtrage Échantillon Numérisez
Technique de codage des formes d'ondes Contenu Introduction Conditions préalables Conditions requises Composants utilisés Conventions Modulation par impulsions et codage Filtrage Échantillon Numérisez
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Centrale électrique hybride ENERTRAG. Centrale électrique hybride. Description succincte
 ENERTRAG Centrale électrique hybride Description succincte Centrale électrique hybride «La vie des citoyennes et citoyens changera dans les années à venir, de sorte que nous vivions en étant plus économes
ENERTRAG Centrale électrique hybride Description succincte Centrale électrique hybride «La vie des citoyennes et citoyens changera dans les années à venir, de sorte que nous vivions en étant plus économes
SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION)
") Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
3ème séance de Mécanique des fluides. Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait. 2 Écoulements potentiels
 3ème séance de Mécanique des fluides Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait 1 Généralités 1.1 Introduction 1.2 Équation d Euler 1.3 Premier théorème de Bernoulli 1.4
3ème séance de Mécanique des fluides Rappels sur les premières séances Aujourd hui : le modèle du fluide parfait 1 Généralités 1.1 Introduction 1.2 Équation d Euler 1.3 Premier théorème de Bernoulli 1.4
A chaque couleur dans l'air correspond une longueur d'onde.
 CC4 LA SPECTROPHOTOMÉTRIE I) POURQUOI UNE SUBSTANCE EST -ELLE COLORÉE? 1 ) La lumière blanche 2 ) Solutions colorées II)LE SPECTROPHOTOMÈTRE 1 ) Le spectrophotomètre 2 ) Facteurs dont dépend l'absorbance
CC4 LA SPECTROPHOTOMÉTRIE I) POURQUOI UNE SUBSTANCE EST -ELLE COLORÉE? 1 ) La lumière blanche 2 ) Solutions colorées II)LE SPECTROPHOTOMÈTRE 1 ) Le spectrophotomètre 2 ) Facteurs dont dépend l'absorbance
SYSTÈMES ASSERVIS CORRECTION
 SYSTÈMES ASSERVIS CORRECTION //07 SYSTÈMES ASSERVIS CORRECTION ) Introduction... 3.) Les différents systèmes de commande... 3.2) Performances des systèmes asservis... 4.3) Fonction de transfert en boucle
SYSTÈMES ASSERVIS CORRECTION //07 SYSTÈMES ASSERVIS CORRECTION ) Introduction... 3.) Les différents systèmes de commande... 3.2) Performances des systèmes asservis... 4.3) Fonction de transfert en boucle
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS
 1 sur 9 COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS (L'article intégral est paru dans Gestions Hospitalières n 357 de juin-juillet 1996) Pour plus d'informations concernant
1 sur 9 COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS (L'article intégral est paru dans Gestions Hospitalières n 357 de juin-juillet 1996) Pour plus d'informations concernant
ENREGISTREUR DE TEMPERATURE
 ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
La Gestion Technique Centralisée. Qu est ce que c est? A quoi ça sert?
 La Gestion Technique Centralisée. Qu est ce que c est? A quoi ça sert? Cet article a pour objectif de rappeler les notions principales relatives à la Gestion Technique Centralisée. Mais qu entend on par
La Gestion Technique Centralisée. Qu est ce que c est? A quoi ça sert? Cet article a pour objectif de rappeler les notions principales relatives à la Gestion Technique Centralisée. Mais qu entend on par
(51) Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)
 Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)") (19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
(19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
FICHE 1 Fiche à destination des enseignants
 FICHE 1 Fiche à destination des enseignants 1S 8 (b) Un entretien d embauche autour de l eau de Dakin Type d'activité Activité expérimentale avec démarche d investigation Dans cette version, l élève est
FICHE 1 Fiche à destination des enseignants 1S 8 (b) Un entretien d embauche autour de l eau de Dakin Type d'activité Activité expérimentale avec démarche d investigation Dans cette version, l élève est
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Impact de choix d implantation sur les performances d une application de Contrôle-Commande
 Recherche Impact de choix d implantation sur les performances d une application de Contrôle-Commande Fabrice Jumel Nicolas Navet Françoise Simonot-Lion CITI - INSA 20, Avenue Albert Einstein, F6962 Villeurbanne
Recherche Impact de choix d implantation sur les performances d une application de Contrôle-Commande Fabrice Jumel Nicolas Navet Françoise Simonot-Lion CITI - INSA 20, Avenue Albert Einstein, F6962 Villeurbanne
CHAPITRE IX : Les appareils de mesures électriques
 CHAPITRE IX : Les appareils de mesures électriques IX. 1 L'appareil de mesure qui permet de mesurer la différence de potentiel entre deux points d'un circuit est un voltmètre, celui qui mesure le courant
CHAPITRE IX : Les appareils de mesures électriques IX. 1 L'appareil de mesure qui permet de mesurer la différence de potentiel entre deux points d'un circuit est un voltmètre, celui qui mesure le courant
VIII- Circuits séquentiels. Mémoires
 1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
Recherche De Coalescences Binaires Étalonnage Du Détecteur
 Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,