CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
|
|
|
- Dominique Leroy
- il y a 10 ans
- Total affichages :
Transcription
1
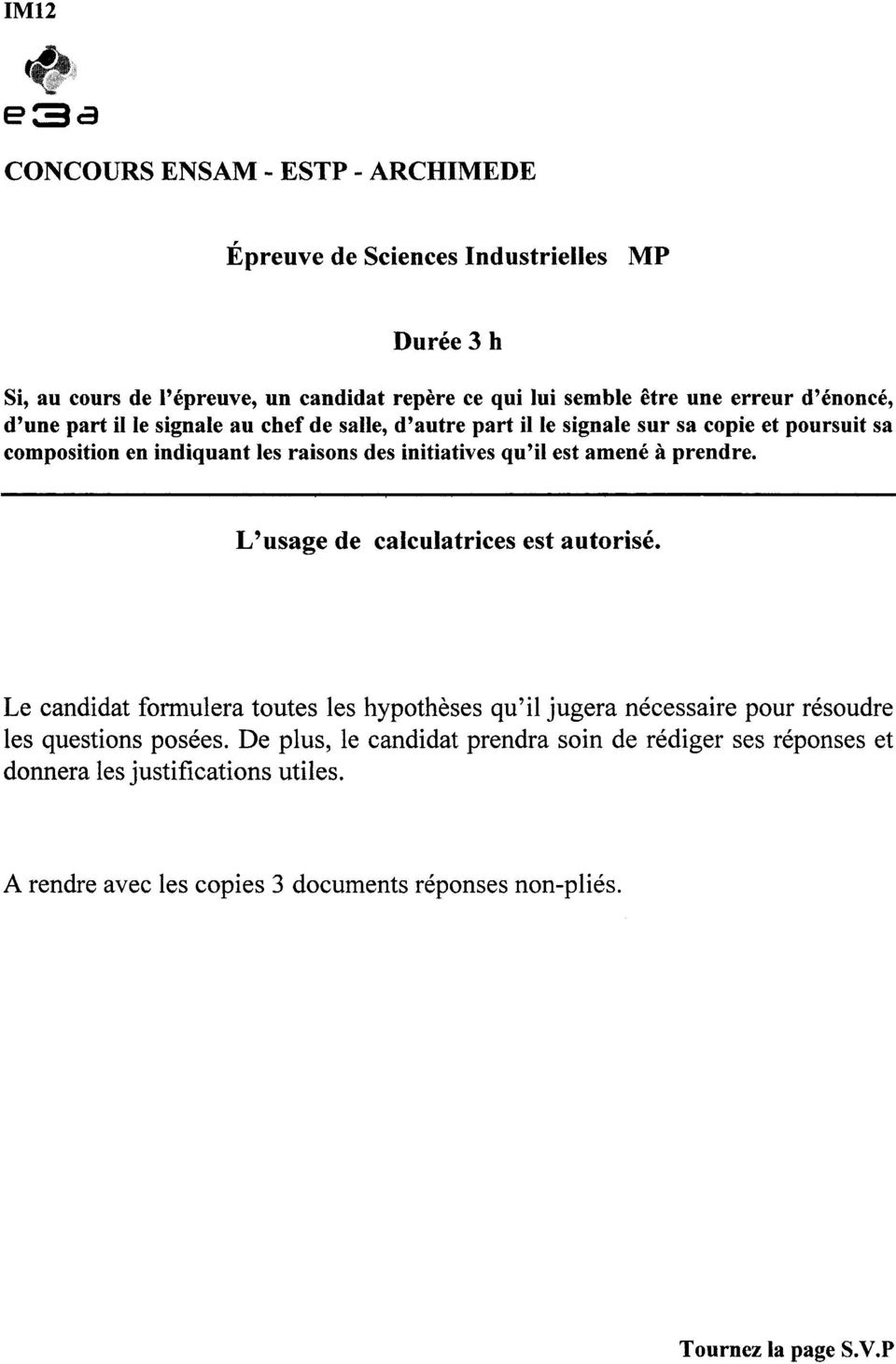
2 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs d une longueur de 100 m. Ces câbles servent également à alimenter la caméra et ses moteurs d orientations qui sont liés au chariot. Un câble tracteur dont les deux extrémités sont attachées au chariot est actionné par un moteur à courant continu fixé au bâti. Deux contrepoids via un moufle (voir l agrandissement sur la figure 1) maintiennent les câbles porteurs en tension. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus. Le chariot transporte une caméra (figure 2) en liaison rotule à doigt avec son support dont les axes, l un vertical et l autre horizontal peuvent être pilotés à distance par le télésurveilleur ou le logiciel de télésurveillance. De plus, le chariot embarque le système de communication sans fil. Figure 2 : Chariot (sans le capot supérieur) intégrant une caméra deux axes. Un prototype a été réalisé et testé, ce qui a permis d améliorer certaines parties et de contrôler que le cahier des charges fonctionnel pouvait être respecté ; lors de ces tests des mouvements parasites ont été Page 2 sur 11

3 observés. Un phénomène de pompage (déplacement vertical), des oscillations de tangage (avant/arrière) et de roulis (tribord/bâbord) surviennent dès que l on met le chariot en mouvement. Ces mouvements limitent l utilisation de la caméra dans ses grossissements les plus forts. En effet, le zoom de la caméra peut réduire l angle de champ (ou angle de vue) jusqu à 1,8. Par ailleurs, le stabilisateur d image incorporé ne permet de corriger des tremblements que sur un tiers de la largeur ou de la hauteur des images. Q1) a) Calculer en mètres, le champ observable à 100 m avec le plus fort grossissement. b) Calculer également l angle de roulis admissible grâce au stabilisateur. L étude qui est proposée dans ce sujet porte sur le comportement du chariot lors d un déplacement et plus précisément sur les limites de stabilité. Voici le diagramme simplifié des interacteurs pour cette phase de vie : Logiciel de télésurveillance Normes & Réglementations en vigueur FS4 FS1 Zone à surveiller Lieu FS3 Caméra sur chariot mobile FS2 Alimentation électrique Figure 3 : le diagramme simplifié des interacteurs Description des Fonctions de Services : FS1 : obtenir des images des zones à surveiller exploitables par le logiciel. FS2 : être alimentée en énergie électrique réglementée. FS3 : évoluer sans gêne ni danger dans le lieu d exploitation. FS4 : être adaptée aux normes et aux réglementations en vigueur. Page 3 sur 11
 a) Calculer en mètres, le champ observable à 100 m avec le plus fort grossissement. b) Calculer également l angle de roulis admissible grâce au stabilisateur.")
4 Le logiciel peut piloter la caméra en la déplaçant et en l orientant sur les zones à couvrir, par exemple, les allées transversales d un grand entrepôt. Des événements inhabituels peuvent être détectés et analysés par le logiciel. Un objet mobile peut être suivi dans les zones surveillées. Tout ceci nécessite que les images acquises et leur transmission soient de bonne qualité. Donc, les déplacements de la caméra doivent être suffisamment stables. Caractérisation d une partie de la Fonction de Service FS1 : Qualification Critère Niveau Pompage Amplitude des oscillations 2 cm maxi Tangage Amplitude des oscillations 3 maxi Roulis Amplitude des oscillations 3 maxi Positionnement Position finale ±5 cm maxi Suivi Vitesse Maxi 2 m/s Contrôle de la vitesse Respecter la vitesse 1% maxi de la vitesse de consigne Étude de la Fonction de Service FS1 : Obtenir des images des zones à surveiller exploitables par le logiciel. FS1 Obtenir des images exploitables FT1 Acquérir des images FT2 Transmettre les images FT3 Déplacer la caméra FT 31 Commander le déplacement FT 32 Limiter le tangage FT 33 Limiter le roulis Figure 4 : FAST partiel L étude sera limitée à des analyses des sous fonctions techniques de FT3. Q2) Expliquer qualitativement et succinctement ce qui peut provoquer le tangage. Page 4 sur 11

5 1 FONCTION TECHNIQUE FT31 : COMMANDER LE DEPLACEMENT Objectif de l étude : Vérifier le respect de la précision imposée par le Cahier des Charges Fonctionnel (CdCF) en positionnement et en vitesse sans tenir compte des mouvements parasites. Le schéma bloc physique de la commande du déplacement du chariot est le suivant : Xc(p) + HC G U(p) + Cs(p) (p) S S(p) Xs(p) - - Figure 5 : Schéma bloc physique de la commande Avec : x c consigne de position à atteindre s position angulaire de l'arbre de sortie du motoréducteur x s position réelle du chariot s vitesse de rotation de l arbre de sortie du motoréducteur G gain de l amplificateur H C transmittance du correcteur c s couple en sortie du motoréducteur u tension d alimentation du moteur Les transmittances des différents blocs seront déterminées dans la suite du sujet pour pouvoir étudier le comportement global du système. 1.1 MODÉLISATION DU MOTOREDUCTEUR Remarque : Pour toute l'étude, les variables temporelles seront écrites en minuscule et les variables dans le domaine de Laplace en majuscule. Page 5 sur 11

6 Le comportement linéarisé du motoréducteur autour de son point d équilibre est modélisé par les quatre équations suivantes : Équation mécanique Équation électrique Équation de couplage tension vitesse Équation de couplage couple intensité : c s (t) + c r (t) = J eq.d² s (t)/dt² : u(t) = R.i(t) + e(t) + L.di(t)/dt : e(t) = k e. s (t) : c s (t) = k t.i(t) Avec : u tension d alimentation du moteur en V. c r couple résistant appliqué à l arbre de sortie du motoréducteur en N.m. s d s /dt vitesse de rotation de l arbre de sortie du motoréducteur en rad/s. L inductance de l induit en H. i intensité dans l induit du moteur en A. e force contre électromotrice du bobinage du moteur en V. R résistance de l induit en Ohm. J eq moment d inertie équivalente de l ensemble mobile rapportée à l arbre de sortie du motoréducteur en kg.m². Le moment d inertie équivalente du motoréducteur rapportée à son arbre de sortie est J m = 9, kg.m². Le couple résistant c r est négligé car les câbles porteurs sont supposés horizontaux dans cette partie du problème et les frottements sont négligés. Données : Tension maximale d alimentation du moteur U max = 24 V Courant nominale de l induit I n = 7,8 A Constante de couple k t = 0,41 N.m/A Constante de force contre électromotrice k e = 0,41 V.s/rad Résistance de l induit R = 0,103 Inductance de l induit L = 0,04 mh Gain de l amplificateur G = 400 V/m Masse du chariot M = 4,3 kg Rayon de la poulie motrice R m = 50 mm Longueur total du câble tracteur L T = 200 m Rapport de réduction cinématique du réducteur (entrée/sortie) r = 7 Q3) a) Exprimer les quatre équations relatives au motoréducteur dans le domaine de Laplace en considérant que les conditions de Heaviside (conditions initiales nulles) sont respectées. b) Compléter les blocs modélisant le système sur le document réponse DR1. On néglige l inertie des poulies ainsi que l inertie des roues du chariot par rapport à l inertie du câble tracteur qui a une masse linéique T de 10-2 kg/m et une longueur L T = 200 m. Définition : Soit un ensemble de solides S en mouvement sous l action d un moteur rotatif. Le moment d inertie équivalent, rapporté à l arbre moteur de cet ensemble S est noté Jéq. Ce moment d inertie équivalent est défini par la relation 2 T(S/R) = Jéq où T(S/R) est l énergie cinétique galiléenne de l ensemble S et la vitesse de rotation galiléenne. Page 6 sur 11

7 Q4) a) Déterminer le moment d'inertie équivalente J eq de l'ensemble mobile (motoréducteur, câble tracteur et chariot, les moments d inertie des autres éléments mobiles sont négligeables) rapportée à l'axe de sortie du motoréducteur. b) Donner la part en pourcentage du moment d inertie du moteur dans cette inertie équivalente sachant que l inertie du moteur est J moteur = 1430 g.cm² par rapport à son axe. 1.2 ÉTUDE DE LA BOUCLE FERMÉE Q5) a) Exprimer la fonction de transfert en boucle ouverte H O du système sous la forme canonique. b) Exprimer la fonction de transfert en boucle fermée H du système sous la forme canonique. X (p) S H(p) X (p) L influence de l inductance par rapport aux autres grandeurs caractéristiques sur la réponse du système étant faible, elle sera négligée dans la suite du sujet. On considèrera J eq = 2, kg.m² pour les applications numériques dans la suite du sujet. La transmittance du correcteur H C est égale à 1 pour cette partie. C Q6) Déterminer le coefficient d'amortissement, la pulsation propre non amortie 0 et le gain statique du système K. Q7) Tracer l allure de la réponse temporelle de ce système en faisant apparaître le signal de consigne pour une commande en échelon X C0 de 2 m. Exprimer et calculer l amplitude du premier dépassement D 1 et la pseudo période T n puis, les indiquer sur le graphe. Q8) Déterminer l'erreur statique du système. Dire si le comportement est compatible avec son utilisation. Justifier succinctement. Q9) Déterminer la valeur maximale de la tension appliquée aux bornes du motoréducteur pour cette commande. Vérifier si cette valeur est compatible avec les capacités physiques du motoréducteur. Justifier succinctement. Page 7 sur 11
 Exprimer la fonction de transfert en boucle fermée H du système sous la forme canonique.")
8 Afin d'éviter tout risque de saturation, on décide d'implanter une loi de commande en vitesse de type trapézoïdal. Le démarrage s'effectuera plus progressivement et on restera dans des grandeurs de commande tolérables. De plus, les mouvements parasites du chariot lors des phases de démarrage et d arrêt seront atténués. Figure 6 : Loi de commande Le pilotage effectif du système est toujours réalisé en terme de position qui est le seul paramètre d'entrée. La conversion en position est effectuée par le microcontrôleur de gestion. Q10) a) Identifier de manière qualitative le type de consigne en position correspondant à chacunes de ces trois phases pour le système. b) Sur le document réponse DR2, tracer l'allure de la position du chariot jusqu à son arrêt. Ne pas faire de calculs. Q11) Indiquer sur la courbe précédente l endroit où l erreur est maximale. Justifier succinctement. En vue de comparer le comportement fréquentiel du système actuel avec sa version corrigée, on décide de tracer les diagrammes de Bode en gain et en phase. Q12) a) Sur le graphe semi log du document réponse DR3, tracer en bleu les diagrammes asymptotiques et l allure des courbes réelles des lieux de Bode de la FTBO, H O. Indiquer également la marge de gain MG et la marge de phase M. b) Commenter succinctement ces valeurs vis-à-vis de la stabilité. 1.3 CORRECTION DU SYSTEME Afin d'améliorer les performances du système, on décide de mettre en place une correction par avance de phase. 1 a p H C ( p) avec = 0,01 s et a = 2,9 1 p Q13) Sur le graphe semi log du document réponse DR3, tracer en noir le diagramme asymptotique du lieu de Bode en gain correspondant au correcteur. La phase du correcteur est déjà tracée. Q14) Sur le graphe semi log du document réponse DR3, tracer en vert l allure des courbes réelles des lieux de Bode de la fonction de transfert en boucle ouverte du système corrigé. Indiquer également la marge de gain MG c et la marge de phase M c. Q15) Commenter succinctement l apport de ce correcteur sur la stabilité du système. Page 8 sur 11

9 Conclusion de cette partie : On a vérifié partiellement la qualité de l asservissement au regard du Cahier des Charges Fonctionnel. Toutefois, divers essais sur le prototype ont montré qu avec cette commande le comportement général n'est pas celui attendu. Un écart statique apparaît systématiquement. Une recherche des sources d'erreurs a mis en évidence que l'hypothèse formulée sur les câbles porteurs n'est pas correcte. En effet, malgré la mise en tension des câbles porteurs par le moufle, la déformation est non négligeable. La prise en compte de cette déformation impose une modification de la structure de la commande. Ceci est étudié dans la seconde partie. 2 FONCTION TECHNIQUE FT32 : LIMITER LE TANGAGE Objectif de l étude : Vérifier que l angle de tangage est inférieur à celui imposé par le Cahier des Charges Fonctionnel (CdCF). Cette étude permettra d affiner la loi du mouvement du chariot et donc, d améliorer la modélisation de la commande utilisée pour la FT31. Le référentiel R (O ; x, y, z) lié au sol 0 est considéré comme galiléen avec ascendant et x 0 un axe horizontal. y axe vertical On associe le repère R 1(O ; x, 1 y, 1 z 0) au chariot 1. L étude est faite ici en considérant le chariot comme un solide indéformable et ayant un roulis nul. De plus, à la vue du plan de symétrie du chargement, on considérera dans cette partie le problème comme plan. 0 O Câble tracteur Sens du mouvement Tension du brin mou du câble tracteur négligée visà-vis du brin tendu D YS 2 y 0 G x 0 XS Figure 7 : Schéma du paramétrage des câbles Q16) Afin de faciliter certains calculs qui vont suivre, tracer la figure de changement de base entre les repères R 0 et R 1. Puis, exprimer le vecteur rotation associé. D x D y D A O B x A x B y G G Figure 8 : Schéma du paramétrage du chariot. Page 9 sur 11

10 Paramétrage :. OA xa x1 ;. OB xb x1 ;. OG yg y1 ; OD xd. x1 y D. y1 et OG 0 xs. x0 ys. y0 Avec : G centre de gravité du mobile A et B centres des galets. D point d'attache du câble tracteur sur le chariot. T D norme de l effort tracteur. M masse du chariot. M = 4,3 kg J G moment d inertie du chariot par rapport à l axe, L P longueur des câbles porteurs. L P = 100 m. Gz 0 avec J G = 0,2 kg.m². Hypothèses : L action mécanique du câble porteur sur respectivement, les roues avant ou les roues arrière peut être modélisée par un glisseur RA ou RB dont l axe central est incliné d un angle A ou B avec la verticale (voir figure 9) passant par le point A ou B. Q17) Pour déterminer les équations scalaires du mouvement : a) Appliquer au chariot le théorème de la résultante dynamique. Laisser l équation sous sa forme vectorielle. b) Appliquer au chariot le théorème du moment dynamique exprimé au point G. Laisser l équation sous sa forme vectorielle. c) En déduire le système d équations scalaires du mouvement en projetant les équations vectorielles précédentes dans la base 0. Pour résoudre ce système, il faut déterminer les angles A et B. Q18) On suppose que l action mécanique RA ou RB du câble porteur sur une roue peut être modélisée par un glisseur dont l axe central passe par la bissectrice de l angle d enroulement. Exprimer les angles A et B en fonction des angles 1 et 2. Pour résoudre le système, il faut déterminer également les angles 1 et 2. Figure 9 : Schéma du contact entre le câble et les roues. Q19) Les contrepoids ont chacun une masse M P de 50 kg (voir le détail du moufle sur la figure 1). En déduire l expression de la tension T P, sur un des points d'attache des câbles porteurs sur le moufle. Décrire la démarche de résolution. Faire l application numérique. Page 10 sur 11

11 On fera l hypothèse que l on peut assimiler l allure de chaque câble à deux segments de droite faisant un angle 1 ou 2 (figure 10) et on négligera les dimensions du chariot par rapport aux longueurs des câbles. De plus, on supposera que la tension dans les câbles porteurs au niveau du chariot est la même que celle au niveau des attaches. Figure 10 : Schéma simplifié de l allure des câbles. Q20) En déduire la relation géométrique, reliant les angles 1 et 2 des câbles porteurs en fonction de la position x S du chariot. Q21) Appliquer à l ensemble, chariot plus les câbles dans son voisinage proche le théorème de la résultante dynamique en projection sur y 0. En pratique, les angles i sont très faibles. Q22) Faire un développement à l ordre 1 des équations précédentes pour en déduire les lois du mouvement. On négligera la composante verticale de la résultante dynamique par rapport aux autres actions mécaniques. De plus, on prendra y G nul. Conclusion de cette partie de l étude : On a les équations permettant d avoir les lois du mouvement. On peut donc déterminer l amplitude des oscillations de tangage et la transmittance entre T D et X S. Le chariot devant rester en place, le système de commande doit générer un certain couple de maintien C R. Après résolution, simplification et linéarisation des équations obtenues à la question précédente, on obtient : x T 4,3. x s D S Q23) Déterminer la transmittance H MIC (p) = C R (p) / X S (p). Q24) Tracer le nouveau schéma bloc prenant en compte C R. Q25) Déterminer l erreur statique et vérifier si le cahier des charges fonctionnel est respecté. Page 11 sur 11
 Appliquer à l ensemble, chariot plus les câbles dans son voisinage proche le théorème de la résultante dynamique en projection sur y 0. En pratique, les angles i sont très faibles.")
12
13 ANNEXE Moto réducteur : Tension maximale U max = 24 V Constante de couple rapportée à l arbre de sortie k t = 0,41 N.m/A Constante contre-électrotromotrice rapportée à l arbre de sortie k e = 0,41 V.s/rd Inductance L = 0,04 mh Résistance de l induit R = 0,103 Moment d inertie équivalente du moto réducteur rapportée à l'arbre de sortie J m = 9, kg.m² Rapport de réduction r = 7 Moment d inertie du moteur J moteur = 1430 g.cm² Moment d inertie équivalente J eq = 2, kg.m² Amplificateur : Gain Poulie motrice : Rayon de la poulie motrice Câble tracteur : Longueur totale du câble tracteur Masse linéique du câble tracteur G = 400 V/m R m = 50 mm L T = 200 m T = 10-2 kg/m Chariot : Moment d inertie du chariot par rapport à l axe Masse du chariot Gz, 0 J G = 0,2 kg.m² M = 4,3 kg Câble porteur : Longueur d'un câble porteur Masse linéique Contrepoids : Masse L P = 100 m p = 0,125 kg/m M P = 50 kg O 0 1 Câble tracteur 1 C YS 2 y 0 G x 0 XS D A x D x A O y D y G x B B. OA xa x1. OB xb x1. OG yg y1 OD xd. x yd. y OG x. x y. y S 0 S 0 G

14 Xc(p) G U(p) Cs(p) Xs(p) DOC REPONSE 1 PAGE 29/01/08 9:39 Page 1 Document Réponse DR1 : Hc

15 DOC REPONSE 1 PAGE 29/01/08 9:39 Page 2 Document Réponse DR2 :

16 DOC REPONSE 1 PAGE 29/01/08 9:39 Page 3 Document Réponse DR3 :

SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Automatique (AU3): Précision. Département GEII, IUT de Brest contact: [email protected]
: Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr") Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: [email protected] Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: [email protected] Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 7. Circuits Magnétiques et Inductance. 7.1 Introduction. 7.1.1 Production d un champ magnétique
 Chapitre 7 Circuits Magnétiques et Inductance 7.1 Introduction 7.1.1 Production d un champ magnétique Si on considère un conducteur cylindrique droit dans lequel circule un courant I (figure 7.1). Ce courant
Chapitre 7 Circuits Magnétiques et Inductance 7.1 Introduction 7.1.1 Production d un champ magnétique Si on considère un conducteur cylindrique droit dans lequel circule un courant I (figure 7.1). Ce courant
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
PROJET de Sciences Industrielles pour l ingénieur
 SESSION 2013 TSIPR08 EPREUVE SPECIFIQUE - FILIERE TSI " PROJET de Sciences Industrielles pour l ingénieur Durée : 6 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision
SESSION 2013 TSIPR08 EPREUVE SPECIFIQUE - FILIERE TSI " PROJET de Sciences Industrielles pour l ingénieur Durée : 6 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision
Donner les limites de validité de la relation obtenue.
 olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
Interaction milieux dilués rayonnement Travaux dirigés n 2. Résonance magnétique : approche classique
 PGA & SDUEE Année 008 09 Interaction milieux dilués rayonnement Travaux dirigés n. Résonance magnétique : approche classique Première interprétation classique d une expérience de résonance magnétique On
PGA & SDUEE Année 008 09 Interaction milieux dilués rayonnement Travaux dirigés n. Résonance magnétique : approche classique Première interprétation classique d une expérience de résonance magnétique On
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Mathématiques et petites voitures
 Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
BTS Groupement A. Mathématiques Session 2011. Spécialités CIRA, IRIS, Systèmes électroniques, TPIL
 BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
TD 9 Problème à deux corps
 PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
SYSTÈMES ASSERVIS CORRECTION
 SYSTÈMES ASSERVIS CORRECTION //07 SYSTÈMES ASSERVIS CORRECTION ) Introduction... 3.) Les différents systèmes de commande... 3.2) Performances des systèmes asservis... 4.3) Fonction de transfert en boucle
SYSTÈMES ASSERVIS CORRECTION //07 SYSTÈMES ASSERVIS CORRECTION ) Introduction... 3.) Les différents systèmes de commande... 3.2) Performances des systèmes asservis... 4.3) Fonction de transfert en boucle
Mécanique. 1 Forces. 1.1 Rappel. 1.2 Mesurer des forces. 3BC - AL Mécanique 1
 3BC - AL Mécanique 1 Mécanique 1 Forces 1.1 Rappel Pour décrire les effets d une force, nous devons préciser toutes ses propriétés : son point d application ; sa droite d action, c est-à-dire sa direction
3BC - AL Mécanique 1 Mécanique 1 Forces 1.1 Rappel Pour décrire les effets d une force, nous devons préciser toutes ses propriétés : son point d application ; sa droite d action, c est-à-dire sa direction
DYNAMIQUE DE FORMATION DES ÉTOILES
 A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
MATIE RE DU COURS DE PHYSIQUE
 MATIE RE DU COURS DE PHYSIQUE Titulaire : A. Rauw 5h/semaine 1) MÉCANIQUE a) Cinématique ii) Référentiel Relativité des notions de repos et mouvement Relativité de la notion de trajectoire Référentiel
MATIE RE DU COURS DE PHYSIQUE Titulaire : A. Rauw 5h/semaine 1) MÉCANIQUE a) Cinématique ii) Référentiel Relativité des notions de repos et mouvement Relativité de la notion de trajectoire Référentiel
Sujet. calculatrice: autorisée durée: 4 heures
 DS SCIENCES PHYSIQUES MATHSPÉ calculatrice: autorisée durée: 4 heures Sujet Approche d'un projecteur de diapositives...2 I.Questions préliminaires...2 A.Lentille divergente...2 B.Lentille convergente et
DS SCIENCES PHYSIQUES MATHSPÉ calculatrice: autorisée durée: 4 heures Sujet Approche d'un projecteur de diapositives...2 I.Questions préliminaires...2 A.Lentille divergente...2 B.Lentille convergente et
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX
 SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
EXERCICE 2 : SUIVI CINETIQUE D UNE TRANSFORMATION PAR SPECTROPHOTOMETRIE (6 points)
") BAC S 2011 LIBAN http://labolycee.org EXERCICE 2 : SUIVI CINETIQUE D UNE TRANSFORMATION PAR SPECTROPHOTOMETRIE (6 points) Les parties A et B sont indépendantes. A : Étude du fonctionnement d un spectrophotomètre
BAC S 2011 LIBAN http://labolycee.org EXERCICE 2 : SUIVI CINETIQUE D UNE TRANSFORMATION PAR SPECTROPHOTOMETRIE (6 points) Les parties A et B sont indépendantes. A : Étude du fonctionnement d un spectrophotomètre
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Items étudiés dans le CHAPITRE N5. 7 et 9 p 129 D14 Déterminer par le calcul l'antécédent d'un nombre par une fonction linéaire
 CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
1 Mise en application
 Université Paris 7 - Denis Diderot 2013-2014 TD : Corrigé TD1 - partie 2 1 Mise en application Exercice 1 corrigé Exercice 2 corrigé - Vibration d une goutte La fréquence de vibration d une goutte d eau
Université Paris 7 - Denis Diderot 2013-2014 TD : Corrigé TD1 - partie 2 1 Mise en application Exercice 1 corrigé Exercice 2 corrigé - Vibration d une goutte La fréquence de vibration d une goutte d eau
NOTICE DOUBLE DIPLÔME
 NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
NOTICE DOUBLE DIPLÔME MINES ParisTech / HEC MINES ParisTech/ AgroParisTech Diplômes obtenus : Diplôme d ingénieur de l Ecole des Mines de Paris Diplôme de HEC Paris Ou Diplôme d ingénieur de l Ecole des
TP 03 B : Mesure d une vitesse par effet Doppler
 TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
CESAB P200 1,4-2,5 t. Transpalettes accompagnant. Spécifications techniques. another way
 CESAB P200 1,4-2,5 t Transpalettes accompagnant Spécifications techniques 1,4-1,6 t CESAB P214- P216 Spécifications techniques IDENTIFICATION 1.1 Constructeur CESAB CESAB 1.2 Modèle P214 P216 1.3 Traction
CESAB P200 1,4-2,5 t Transpalettes accompagnant Spécifications techniques 1,4-1,6 t CESAB P214- P216 Spécifications techniques IDENTIFICATION 1.1 Constructeur CESAB CESAB 1.2 Modèle P214 P216 1.3 Traction
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
ANALYSE SPECTRALE. monochromateur
 ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
ht ANALYSE SPECTRALE Une espèce chimique est susceptible d interagir avec un rayonnement électromagnétique. L étude de l intensité du rayonnement (absorbé ou réémis) en fonction des longueurs d ode s appelle
Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites
 I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
I- Les trois lois de Kepler : Chapitre 9 : Applications des lois de Newton et Kepler à l'étude du mouvement des planètes et des satellites Les lois de Kepler s'applique aussi bien pour une planète en mouvement
Champ électromagnétique?
 Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
Qu est-ce qu un Champ électromagnétique? Alain Azoulay Consultant, www.radiocem.com 3 décembre 2013. 1 Définition trouvée à l article 2 de la Directive «champs électromagnétiques» : des champs électriques
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Chapitre 5. Le ressort. F ext. F ressort
 Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
TD de Physique n o 1 : Mécanique du point
 E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
E.N.S. de Cachan Département E.E.A. M FE 3 e année Phsique appliquée 011-01 TD de Phsique n o 1 : Mécanique du point Exercice n o 1 : Trajectoire d un ballon-sonde Un ballon-sonde M, lâché au niveau du
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques
 SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques Durée 4 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef
SUJET ZÉRO Epreuve d'informatique et modélisation de systèmes physiques Durée 4 h Si, au cours de l épreuve, un candidat repère ce qui lui semble être une erreur d énoncé, d une part il le signale au chef
1 Problème 1 : L avion solaire autonome (durée 1h)
") Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux. - Section Audioprothésiste / stage i-prépa intensif -
 POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (