SCIENCES INDUSTRIELLES (S.I.)
|
|
|
- Jean-Marie Leduc
- il y a 9 ans
- Total affichages :
Transcription
1 SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision de la rédaction. Si un candidat est amené à repérer ce qui peut lui sembler être une erreur d énoncé, il le signalera sur sa copie et devra poursuivre sa composition en expliquant les raisons des initiatives qu il a été amené à prendre. " Les calculatrices sont autorisées Le sujet comporte 19 pages dont : 16 pages de texte de présentation et énoncé du sujet ; 4 pages de document réponse à rendre obligatoirement avec la copie. Toute documentation autre que celle fournie est interdite. REMARQUES PRELIMINAIRES Il est conseillé d utiliser des feuilles de papier brouillon afin de mettre au point les développements mathématiques, schémas, graphes et courbes, avant de les recopier au propre sur la copie à rendre. Il est demandé au candidat de bien vouloir inscrire les résultats et les développements nécessaires aux différentes questions sur sa copie, en précisant bien le numéro de la question traitée et, si possible, dans l ordre des questions. Les résultats attendus seront obligatoirement entourés. 1/16 A

2 Simulateur de conduite Un simulateur est un dispositif dont la fonction principale est de reproduire le plus fidèlement possible le comportement d un système de référence (réel). Par rapport à la conduite sur route, les simulateurs de conduite offrent trois avantages majeurs : ils présentent un environnement sans danger pour le conducteur (par exemple pour tester des accidents virtuels) ; une même expérience peut être répétée aussi souvent que nécessaire dans des conditions identiques ; ils permettent une économie considérable. Ainsi, les simulateurs de conduite sont utilisés dans de nombreux domaines : travaux de recherche sur le comportement humain ; étude et amélioration de la sécurité ; aide à la conception de véhicule ou de l environnement routier ; apprentissage à moindre coût ; loisir... Le simulateur étudié dans ce sujet est un simulateur de course automobile à deux degrés de liberté utilisé par des particuliers dans le domaine du loisir (figure 1). Figure 1 Simulateur de course utilisé dans des salles de jeux vidéo Le diagramme SADT de niveau A-0 de la figure 3, page 3, décrit le besoin du simulateur. Le diagramme des inter-acteurs de la figure 2, page 3, recense quelques fonctions de service du simulateur. 2/16

3 Energie Sol FS5 FS2 Simulateur FS1 FS4 FS3 Salle Joueur Figure 2 Diagramme des inter-acteurs FS1 : restituer les sensations de conduite au joueur par rapport au sol ; FS2 : être correctement et solidement positionné sur le sol ; FS3 : plaire au joueur ; FS4 : être d un encombrement limité par rapport à la salle ; FS5 : être alimenté en énergie. joueur action sur le volant énergie électrique jeu action sur les pédales Restituer les sensations de conduite simulateur de course réglages joueur ayant des sensations informations visuelles et sonores Figure 3 Diagramme SADT de niveau A-0 décrivant le besoin du simulateur de course La fonction principale du système peut se décliner en plusieurs fonctions techniques décrites par le diagramme FAST partiel de la figure 4. Les deux premières fonctions sont gérées lors de la conception du jeu vidéo. FS1 : restituer les sensations de conduite FT1 : restituer les sensations auditives FT2 : restituer les sensations visuelles FT3 : restituer les sensations de mouvement (restitution inertielle) Figure 4 Diagramme FAST partiel de la fonction principale du système Objectif Dans ce sujet, seule la fonction technique FT3 "restituer les sensations de mouvement" sera étudiée pour montrer comment recréer le plus fidèlement possible les accélérations. L objectif de l étude proposée est de justifier que l architecture retenue pour le simulateur permet de répondre au besoin. Cette analyse nécessite : la mise en évidence de la problématique liée à la restitution des accélérations (partie I) ; la description de l architecture du système (partie II) ; la mise en place d un modèle pour chaque constituant de la chaîne d information (stratégie de commande étudiée en partie III) et de la chaîne d énergie (partie IV) ; l utilisation de ces modèles et d un cahier des charges pour dimensionner les composants (partie IV et V) ; la détermination du comportement global du système théoriquement et expérimentalement ainsi que la comparaison des performances obtenues par rapport au cahier des charges (partie V). 3/16


4 I Mise en évidence de la problématique La restitution des accélérations est un problème complexe compte-tenu des fonctions contraintes énoncées dans le diagramme des inter-acteurs et de la connaissance imparfaite de la perception humaine. Pour mettre en évidence la nécessité d adopter une stratégie de commande du simulateur particulière, on s intéresse aux accélérations ressenties lors d une conduite sur circuit. Le logiciel du jeu vidéo fournit différentes informations dont l accélération longitudinale (dans le sens d avance de la voiture) et latérale (voir figure 5) de la voiture par rapport au sol, mais aussi le régime moteur, l enfoncement des pédales d accélérateur et de frein. Ces informations sont utiles à deux niveaux : elles servent de consignes d entrée pour le simulateur mais elles peuvent également être employées pour analyser une course. y z direction latérale direction longitudinale x Figure 5 Direction des accélérations longitudinale et latérale La figure 6, page 5, représente ainsi des données extraites lors d une course sur une portion de circuit telle que décrite sur la figure 7, page 5. Q1. Indiquer, en justifiant à l aide des courbes, pour les zones numérotées 1 à 5 de la figure 6 s il s agit d une zone d accélération, de freinage, de virage à gauche ou virage à droite. Préciser à quoi correspondent les 2 parties entourées dans la zone 1 (s aider des autres courbes). Les profils typiques d accélération longitudinale observés pendant la course précédente sont modélisés par des lois trapèzes d une hauteur d environ 1 g (avec g =9,81 m s 2 ) pendant t m =3s et de temps de montée ou de descente t a de 0,4 s comme indiqué sur la figure 8, page 5. On supposera pour simplifier les calculs que les vitesse et position initiales sont nulles. Q2. Déterminer les distances parcourues pendant la phase de montée (entre t =0s et t =0,4 s) et la phase à accélération constante (entre t =0,4 s et t =3,4 s). Faire les applications numériques. Q3. Indiquer quelle fonction de service ne sera pas satisfaite compte-tenu des distances calculées. 4/16
 et latérale (voir figure 5) de la voiture par rapport au sol, mais")

5 (tours/min) Figure 6 Données extraites du jeu vidéo sur une portion de circuit accélération (m s 2 ) 9,8 temps (s) Figure 7 Portion de circuit sur lequel sont extraites différentes données 0,4 s 3 s 0,4 s Figure 8 Profil d accélération en trapèze Cette étude a permis de montrer qu il était nécessaire de mettre en place une stratégie de commande de déplacement du siège spécifique qui donne l illusion au pilote d être soumis à de telles accélérations. II Architecture du système Le SADT de niveau A0 du document réponse DR 1 présente l organisation du simulateur étudié. Celui-ci est constitué : d une unité centrale munie d un jeu vidéo et du logiciel de génération de consigne de mouvement ; d un volant et d un pédalier ; d un écran et d enceintes audio ; d une structure articulée supportant le siège ; 5/16






6 de deux vérins asservis linéaires mettant en mouvement le siège par l intermédiaire de la structure articulée ; d un boitier (nommé SX3000) gérant à la fois l alimentation des vérins et la communication entre l unité centrale et les vérins. Q4. Compléter sur l ébauche du SADT de niveau A0 du document réponse DR 1 les zones en pointillés en vous aidant de la description du simulateur, du SADT de niveau A-0 de la figure 3, page 3, et de la photo du simulateur de la figure 1, page 2. Q5. Regrouper les constituants en deux catégories : chaîne d information et chaîne d énergie. Un élément, de par sa constitution, sera placé dans les deux chaînes. III Stratégie de commande La structure articulée possède deux degrés de liberté (roulis et tangage) comme indiqué sur la figure 9. La partie I a montré qu il est indispensable de mettre au point une stratégie de commande des degrés de liberté qui permette de recréer les accélérations subies par le pilote pour respecter un encombrement réduit. #» z 0 #» y 0 tangage #» x 0 O roulis Figure 9 Mouvements de tangage et roulis permettant de générer des accélérations longitudinale et transversale La stratégie de commande classique est basée sur une séparation fréquentielle des accélérations extraites du jeu vidéo en deux parties. Le schéma-bloc de la figure 10, page 7, montre le principe de la commande sur l angle de tangage α. Dans tout le sujet, seules les accélérations longitudinales (commande de l angle de tangage) seront considérées. Une stratégie similaire est adoptée pour l angle de roulis. 6/16

7 a tilt H tilt NL a a Tx + T x,jeu K adapt + a mov H mov1 H mov2 α tilt α mov α Figure 10 Stratégie de commande pour un mouvement de tangage Objectif L objectif de cette partie est de déterminer les fonctions de transfert intervenant dans ce schémabloc et de vérifier que cette méthode permet de fournir une consigne d angle adaptée à l encombrement du simulateur. La vérification globale de la stratégie vis-à-vis de la restitution des accélérations longitudinales sera faite en fin de sujet. III.1 Principe On note R 0 (O, x 0, y 0, z 0 ) le repère associé au sol (0), supposé galiléen. Le paramétrage est défini sur la figure 11. L ensemble {conducteur + siège} est noté (1) et est en rotation par rapport au sol (0) autour d un axe (O, y 0 ). On associe le repère R 1 (O, x 1, y 1, z 1 ) à l ensemble (1) et on note α =( x 0, x 1 )=( z 0, z 1 ) l angle de tangage de (1) par rapport à (0). z 1 z 0 x 1 x 0 A h (1) x 1 z 1 y 0 = y 1 O α (0) x 0 y 0 = y 1 α z 0 Figure 11 Paramétrage pour le mouvement de tangage seul et figure de calcul Un point de la tête proche de l oreille interne du pilote noté A est défini par : #» OA = h z 1. L accélération de la pesanteur est g = g z 0 avec g =9,81 m s 2. Le siège est piloté de telle manière que l accélération donnée par le jeu vidéo soit équivalente à l accélération ressentie par le pilote sur le siège. En notant a T l accélération du véhicule, on obtient la définition suivante : a T = a Tx x 1 + a Tz z 1 = #» a (A, 1/0) g. Q6. Montrer que : a Tx = h α g sin(α) a Tz = h α 2 + g cos(α). Dans la stratégie adoptée, l accélération ressentie a Tx est décomposée en deux parties a Tx = a mov + a tilt. La composante a tilt correspond à la partie de l accélération maintenue tandis que la composante a mov caractérise les variations rapides d accélération. 7/16
 le repère associé au sol (0), supposé galiléen. Le paramétrage est défini sur la figure 11.")
8 III.2 Obtention de l accélération a tilt La partie a tilt est extraite de a Tx en utilisant un filtre H tilt caractérisé par les diagrammes de Bode de la figure 12. Elle représente les mouvements maintenus dans le temps. 0 Gain (db) Pulsation (rad s 1 ) Phase ( ) Pulsation (rad s 1 ) Figure 12 Diagrammes de Bode du filtre modélisé par la fonction de transfert H tilt (p). Q7. Proposer une forme de fonction de transfert pour la fonction H tilt (p) en fonction de ces diagrammes de Bode et identifier ses paramètres caractéristiques. Pour reproduire ce type de mouvement, compte-tenu des limitations structurelles du simulateur, on incline le siège d un angle α tilt de manière à orienter le pilote par rapport au vecteur pesanteur de façon à ce qu il ressente une accélération a Tx. Si ce mouvement est couplé avec un défilement des images adéquat, le pilote a la sensation d être dans un véhicule d accélération a Tx. Q8. En utilisant l expression de a Tx obtenue précédemment à la Q6, déterminer, en régime établi (dérivées nulles), l expression de l angle de coordination α tilt, en fonction de g et a Tx. Si l angle de coordination α tilt n est pas trop important, le pilote ne ressent pas la diminution d accélération verticale (composante a Tz ) et n a pas l impression de tomber. En effet, le système vestibulaire de l oreille interne du pilote est sensible à des variations d accélérations supérieures à environ ± 0,25 m s 2 selon la direction verticale. Q9. Donner les valeurs extrêmes (en degré) que peut prendre α tilt afin que la variation d accélération verticale a Tz g (variation par rapport à l accélération verticale de référence g) ne dépasse pas la valeur seuil de détection de l oreille interne en régime établi. Q10. En déduire la valeur maximale d accélération longitudinale a Tx qu il est possible de simuler avec cette méthode en régime établi. Déterminer alors le gain d adaptation K adapt > 0 du schéma-bloc à prendre, sachant que les accélérations extrêmes a T x,jeu délivrées par le logiciel de jeu sont de ± 10 m s 2. 8/16
 en fonction de ces diagrammes de Bode et identifier ses paramètres caractéristiques.")
9 III.3 Détermination de l accélération a mov Le filtre utilisé pour accéder à la partie a mov a pour fonction de transfert H mov1 (p) = On choisit une valeur de τ =0,1 s. τp 1+τp. Q11. Tracer sur le document réponse DR 2 les diagrammes de Bode asymptotiques et l allure des diagrammes réels de ce filtre. Préciser le nom de ce filtre et son intérêt vis-à-vis de la composante à extraire. Une fois l accélération filtrée, on obtient la relation a mov = h α mov. Q12. En déduire la fonction de transfert H mov2 (p). En imposant une consigne a Tx = a 0 u(t) où a 0 est une constante et u(t) la fonction échelon unitaire, on obtient les courbes a mov et α mov définies sur la figure 13. Accélération amov (m/s 2 ) Temps (s) Angle αmov (rad) Figure 13 Accélération a mov et angle α mov en fonction du temps (en s) pour une consigne d accélération en échelon. Q13. A partir de la fonction de transfert H mov2 (p) et de la consigne en échelon imposée, justifier l allure des courbes obtenues par simulation en régime établi et conclure sur la nécessité de choisir un filtre plus élaboré. On modifie donc la fonction H mov2 en la multipliant par un filtre particulier appelé filtre Washout ayant pour but de ramener à zéro la position linéaire obtenue pour une accélération a Tx constante. En choisissant un filtre adapté, on retient la fonction globale suivante : Kp H mov1 (p) H mov2 (p) = (τp+ 1). 3 9/16
.")
10 Q14. Montrer alors qu en régime permanent, l angle α mov obtenu pour une accélération a Tx de type échelon (de valeur a 0 ) est nul. La stratégie de commande complète est testée pour une accélération longitudinale trapèze définie sur la figure 8. On obtient les résultats de simulation de la figure 14 permettant, entre autre, d observer l allure de l angle de tangage à appliquer ainsi que les accélérations a Tx et a Tz obtenues pour cet angle de tangage. atz g (m/s 2 ) atx (m/s 2 ) α (rad) Figure 14 Résultats de simulation pour une accélération longitudinale en trapèze. Q15. Justifier le signe de l angle α. Commenter les niveaux constants des accélérations a Tx et a Tz vis-à-vis de la réponse attendue à partir des différentes valeurs calculées dans cette partie. La loi de commande proposée permet de définir une consigne d angle à suivre pour restituer l accélération donnée par le jeu. Cependant, des stratégies plus élaborées sont en réalité employées pour obtenir des courbes d accélérations plus «régulières». IV Dimensionnement et modélisation du simulateur La partie précédente a permis de définir la loi de mouvement souhaitée pour le siège. Le cahier des charges, associé à la fonction technique FT3 «restituer les sensations de mouvement», qui se décline en la fonction technique «générer un mouvement angulaire donné», est précisé dans le tableau 1. Objectif L objectif de cette partie est de mettre en place une modélisation de la chaîne d énergie du simulateur de manière à vérifier le respect de la loi angulaire déterminée précédemment. La mise en place de ce modèle permettra également de dimensionner les constituants pour respecter le cahier des charges. 10/16
 atx (m/s 2 ) α (rad) Figure 14 Résultats de simulation pour une accélération longitudinale en trapèze. Q15. Justifier le signe de l angle α.")
11 IV.1 Critères Niveaux Débattement angulaire ± 13 Accélération extrême a Tx (définie dans la suite) Masse du conducteur admissible Rapidité ± 2,2 m s kg t 5% < 0,1 s pour une entrée en échelon Précision Erreur nulle en réponse à une consigne en échelon Erreur constante en réponse à une consigne en rampe Stabilité Absolue Dépassement < 20 % Tableau 1 Extrait du cahier des charges Modélisation de la structure articulée La cinématique retenue pour le simulateur est basée sur une structure articulée permettant deux degrés de liberté par l intermédiaire de deux vérins linéaires asservis. On désigne par (3a) et (3b) les corps des vérins en liaison sphérique avec le châssis noté (0), (2a) et (2b) les tiges des vérins en liaison sphérique avec le siège noté (1), lui même en liaison avec le châssis. Les tiges des vérins sont en liaison glissière avec les corps des vérins. La liaison entre le siège et le châssis est réalisée par un joint de cardan (C) qui autorise deux rotations (selon les axes(o, #» x 0 ) et (O, #» y 0 )). Le graphe des liaisons (figure 15) synthétise les modèles de liaisons utilisés pour cette structure. Ce graphe fait référence aux points et axes définis sur l épure du schéma cinématique donné dans le document réponse DR3. Sphérique en A a 2a 1 Pivot d axe (O, #» y 0 ) Sphérique en A b 2b Glissière de direction (A a B a ) C Glissière de direction (A b B b ) 3a Sphérique en B a 0 Pivot d axe (O, #» x 0 ) 3b Sphérique en B b Figure 15 Graphe des liaisons de la structure articulée Q16. A l aide du graphe des liaisons, compléter le schéma cinématique en perspective du document réponse DR3 en respectant les axes et points proposés. Q17. Lorsque les vérins sont à mi-course, l assise du siège est horizontale. Renseigner dans le tableau du document réponse DR 4, par un signe + (une tige de vérin sort) ou un signe (une tige de vérin rentre), le comportement des vérins a et b pour obtenir un mouvement de tangage dans le sens direct ou un mouvement de roulis dans le sens direct. Le vérin a est le vérin situé à l arrière gauche du conducteur. 11/16

12 Q18. Déterminer le degré d hyperstatisme du modèle ainsi proposé en précisant bien les mobilités utiles et internes. Indiquer l intérêt d une telle modélisation vis-à-vis de la détermination des efforts dans le système. Préciser un autre intérêt de ce degré d hyperstatisme. Dans toute la suite de l étude, on ne s intéressera qu au mouvement de tangage (rotation autour de #» y 0 ). Dans ces conditions, il est possible de trouver un modèle plan équivalent du mécanisme. Le vérin est alors appelé vérin équivalent. La figure 16 correspond à cette modélisation plane équivalente. Le paramétrage est donné sur cette figure. α est l angle de tangage du siège par rapport au châssis. Dans toute la suite du problème, on ne s intéressera qu à ce modèle plan. #» BO = L #» x #» 0 OA = h #» z #» 1 BA = λ(t) #» x 3 L = h =0,7 m 2 #» z 1 A #» x 3 1 x 3 x 1 x 0 α y 0 = y 1 = y 3 β z 3 z 1 z 0 #» z 3 B 3 β O α #» x 1 #» x 0 Figure 16 Modèle plan du simulateur pour l étude du mouvement de tangage Le modèle établi va permettre de vérifier le dimensionnement des vérins vis-à-vis des critères du cahier des charges. IV.2 Critère de débattement angulaire La partie III a montré que, pour restituer correctement les accélérations, il fallait que le débattement angulaire du siège soit limité. Pour respecter le critère de débattement angulaire, la course des vérins doit être adaptée. Q19. Par une fermeture géométrique, exprimer λ en fonction de α ainsi que des dimensions constantes du système puis exprimer β en fonction de α et des mêmes dimensions. On donne dans le document réponse DR 5 les courbes obtenues à partir des deux relations déterminées précédemment. Lorsque l assise du siège est horizontale, l angle α est nul, le vérin est alors à mi course (la longueur λ est de 0,99 m). La course du vérin équivalent est de 0,15 m, λ peut donc varier de ± 0,075 m autour de 0,99 m. Q20. Déterminer le débattement angulaire et comparer la valeur obtenue à celle du cahier des charges. 12/16

13 On approche les deux courbes par des droites au voisinage de α =0 : λ = λ 0 + K α α et β = β 0 + K β α. Q21. En utilisant les courbes du document réponse DR 5, donner les valeurs numériques de K α, K β et β 0. Conserver les unités définies sur les figures. Le modèle ainsi établi permettra de relier dans la suite la commande des vérins à l angle souhaité du siège. IV.3 Critère de masse admissible D après les données du constructeur, le vérin équivalent peut développer un effort maximal de ± 200 N environ. On cherche dans cette partie à vérifier si le vérin est capable de mettre en mouvement le siège sur lequel serait assis un conducteur ayant la masse définie dans le cahier des charges. On définit les grandeurs cinétiques et géométriques suivantes : J = 10 kg m 2, moment d inertie de l ensemble {conducteur + siège} selon l axe (O, #» y 0 ) ; m = 100 kg, masse de l ensemble {conducteur + siège} ; OG #» = d #» z 1 avec d =0,35 m : position du centre de gravité de l ensemble {conducteur + siège} (position simplifiée pour limiter les calculs). On note : g #» z 0 avec g =9,81 m s 2, accélération de la pesanteur ; F #» x 3, l action mécanique de la tige du vérin équivalente (2) sur le siège (1) se modélise par un glisseur en A. Q22. En isolant le vérin équivalent {tige (2) + corps (3)} de la figure 16, page 12, justifier que l effort exercé par ce vérin équivalent est dirigé selon #» x 3. La masse du vérin et ses caractéristiques inertielles seront supposées négligeables. Q23. Déterminer une équation reliant les quantités définies ci-dessus et l angle α ainsi que ses dérivées sous la forme : A s d 2 α(t) dt 2 = B s F cos(β α)+c s sin(α) où l on donnera l expression de A s, B s et C s en fonction des paramètres constants. Pour cela, préciser le système isolé. Faire le bilan des actions mécaniques et indiquer l équation du principe fondamental de la dynamique utilisée (résultante / moment, direction, point). Le cahier des charges définit un angle maximal de ± 13. L accélération a Tx ressentie par le conducteur indiquée dans ce cahier des charges de ± 2,2 m s 2 est égale à a Tx = h α g sin(α) d après la question Q6. On prend les valeurs numériques suivantes : A s = 10 kg m 2, B s =0,7 m et C s = 350 N m. Q24. En déduire l expression de la force du vérin F en fonction de a Tx, α, β, g, A s, B s et C s. Effectuer l application numérique dans les conditions les plus défavorables (α = 13, accélération a Tx = 2,2 m s 2 ), la valeur de β sera lue sur la courbe du document réponse DR 5. Conclure quant au choix de ce vérin. 13/16

14 IV.4 Modèle de l ensemble en mouvement Le vérin électrique est constitué d un moteur électrique dont le rotor est lié à la vis d un dispositif vis-écrou de pas p v =3mm tour 1. L écrou est solidaire de la tige du vérin. Le moteur exerce un couple C mot sur la vis. On note ω mot la vitesse angulaire de la vis solidaire du rotor du moteur noté (mot) (θ mot est l angle de rotation de la vis). Q25. Donner le coefficient k T tel que α = ω mot.k T en fonction de p v et K α (défini en Q21). On suppose dans la suite que : α = k T θ mot. On isole tout le simulateur {siège + conducteur et vérin}. On garde le modèle cinématique plan de la figure 16, page 12, composé d un unique vérin. Le moment d inertie de l ensemble {rotor + vis du vérin} autour de son axe est noté J mot = kg m 2. Le moment d inertie de l ensemble {siège + conducteur} est noté J = 10 kg m 2. Les autres quantités inertielles sont négligées. On suppose de plus que β =0. Les frottements visqueux sont modélisés par un couple C v (t) = f v ω mot (t) appliqué sur le rotor du moteur (mot) du vérin équivalent. On suppose que les liaisons sont parfaites. L action de la pesanteur n est prise en compte que sur l ensemble {siège + conducteur} de masse m. Q26. Déterminer l expression de l énergie cinétique E c du simulateur dans le référentiel galiléen (0) et en déduire l inertie équivalente J e de ce système ramenée sur l arbre moteur, telle que E c = 1 2 J e ω 2 mot. Faire l application numérique. Q27. Déterminer l expression des puissances extérieures et intérieures qui s appliquent sur le simulateur. Q28. Montrer que la relation obtenue par l application du théorème de l énergie cinétique après linéarisation (angle α petit) et simplification est : J e ω mot = C mot f v ω mot + Kθ mot où l on précisera l expression de K en fonction de k T, m, d et g. Le moteur est commandé en courant de telle sorte que C mot (t) =k i i(t), où i(t) est l intensité dans le moteur. Q29. Déterminer la fonction de transfert de la chaîne d énergie en supposant les conditions de Heaviside : H mot (p) = θ mot(p) I(p) où I(p) et θ mot (p) sont les transformées de Laplace de i(t) et θ mot (t). La mise en place d un modèle plan pour le mouvement de tangage a permis d une part de vérifier que le vérin était bien dimensionné pour respecter le cahier des charges et d autre part de déterminer une fonction de transfert reliant la commande des moteurs au déplacement angulaire du siège. 14/16
. On suppose dans la suite que : α = k T θ mot. On isole tout le simulateur {siège + conducteur et vérin}.")
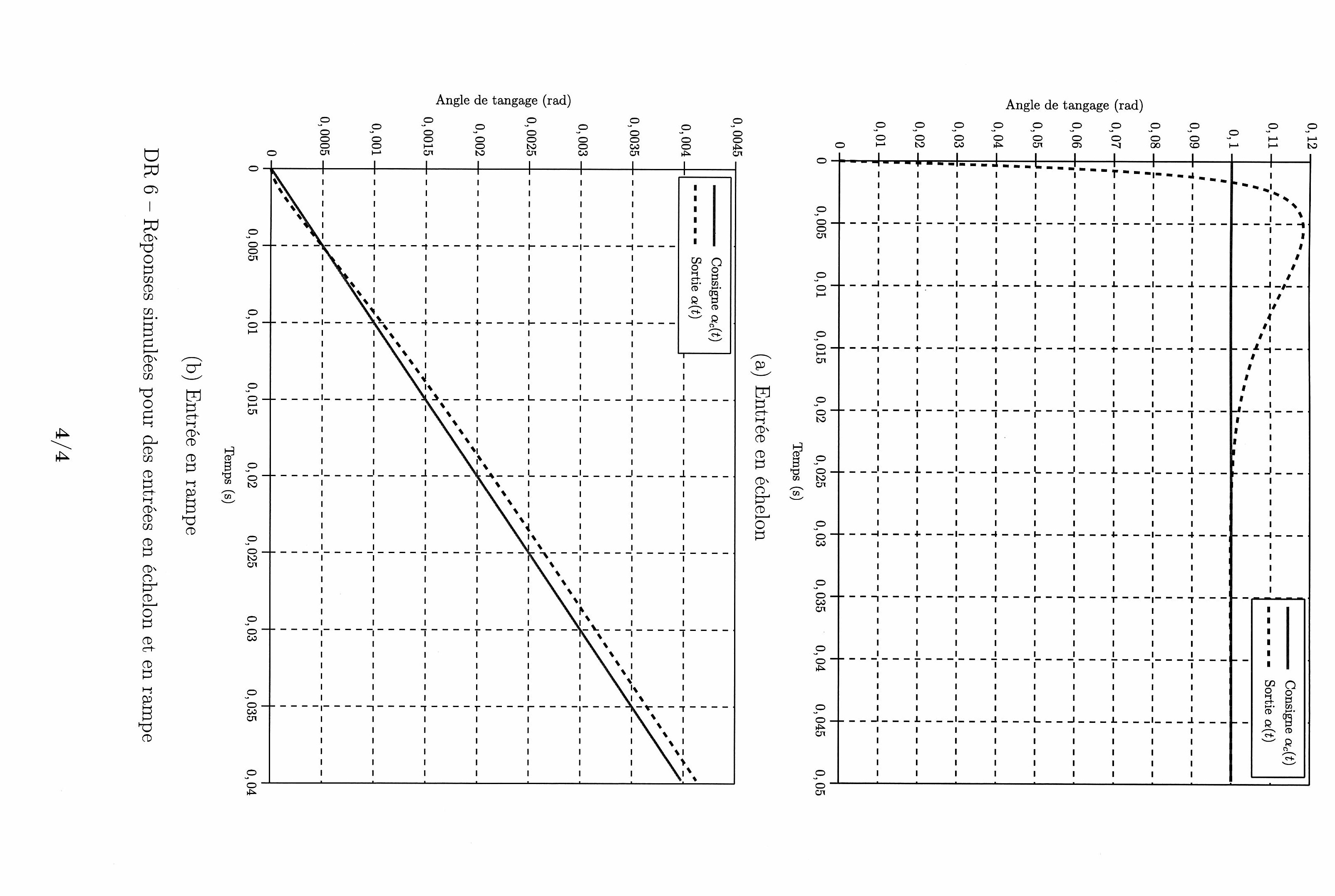
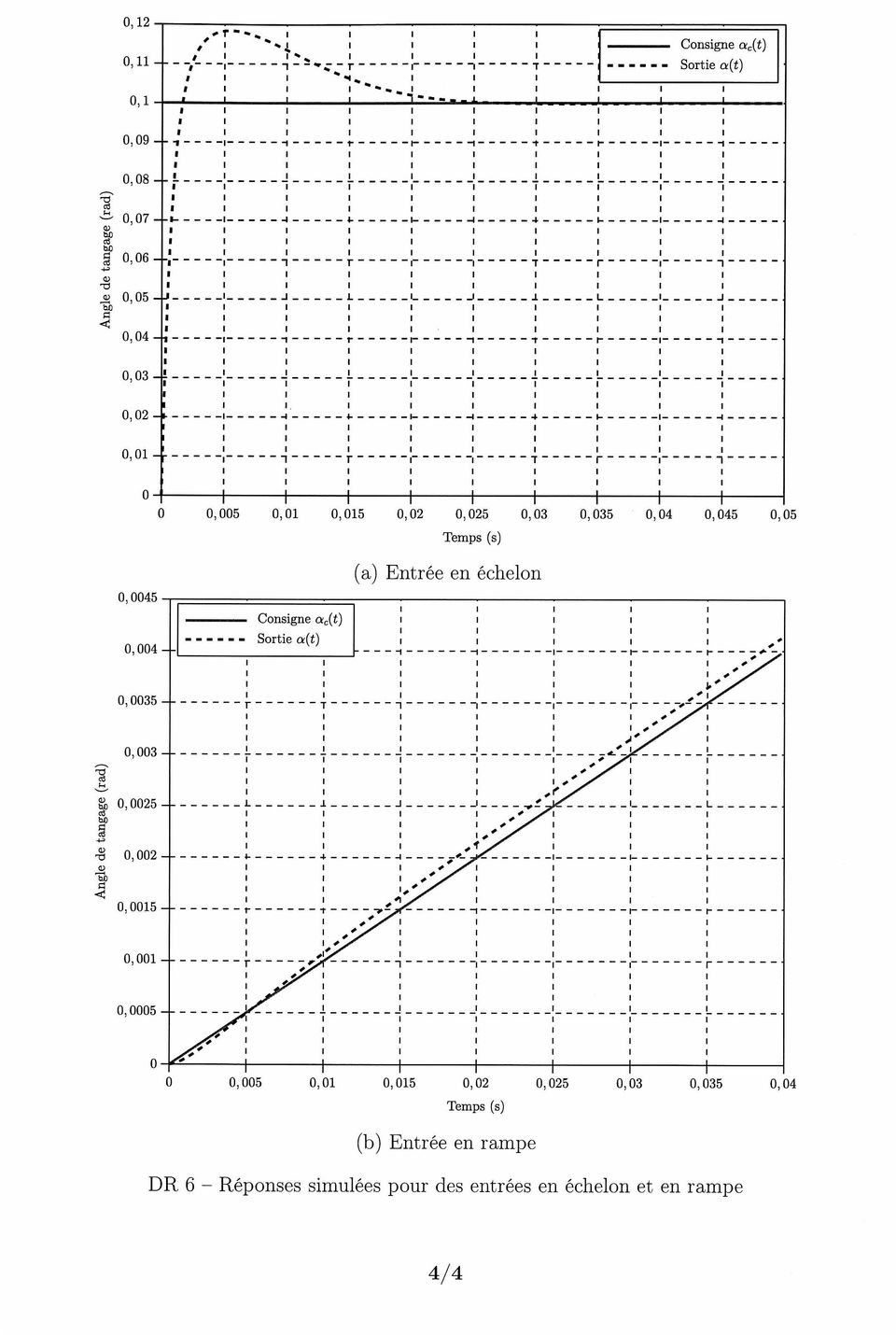
15 V Mise en place de l asservissement Objectif L objectif de cette dernière partie est de mettre en place l asservissement du vérin et de justifier le choix du correcteur pour respecter les consignes d angles. On se réfèrera aux éléments du cahier des charges définis en début de Partie IV. L angle de rotation du moteur est mesuré par un capteur de gain K c. L image de l angle de rotation donnée par le capteur est comparée à une grandeur image de l angle de tangage de consigne α c fournie par un adaptateur de gain K a. L écart ε(t) correspondant est corrigé par un correcteur + amplificateur de fonction de transfert C(p) pour fournir l intensité de commande i(t) au moteur. On rappelle que H mot (p) = θ mot(p) et que α(p) =k T θ mot (p). I(p) Q30. Proposer un schéma-bloc de la structure d asservissement d entrée α c (p) et de sortie α(p). Q31. Déterminer l expression du gain K a permettant d obtenir une erreur α c α proportionnelle à l écart ε(t). Montrer que le schéma-bloc d asservissement peut alors être ramené à un schémabloc à retour unitaire de la forme de la figure 17, avec H(p) à préciser. α c (p) + C(p) H(p) α(p) Figure 17 Schéma-bloc à retour unitaire équivalent au schéma-bloc du système Dans toute la suite du sujet, on utilisera la fonction, en unités S.I., H(p) = 1 1, p p 0, (1 + Tp) 2 On retient un correcteur de la forme C(p) =K cor. Tp En choisissant judicieusement les paramètres T et K cor du correcteur, on assure la stabilité du système en boucle fermée. Q32. Justifier que le système est précis en réponse à une entrée échelon et que l erreur est finie en réponse à une entrée en rampe de pente unitaire. Donner l expression de cette erreur. On donne dans le document réponse DR 6 les réponses théoriques à un échelon de 0,1 rad et à une rampe de pente 0,1 rad s 1 pour un réglage satisfaisant du correcteur. Q33. Vérifier que le système est stable, que la précision est cohérente avec la question précédente (donner les valeurs des erreurs) et déterminer le temps de réponse à 5 % ainsi que la valeur du premier dépassement. Les tracés devront être faits sur le document réponse DR 6. Conclure quant à la satisfaction du cahier des charges. 15/16
 correspondant est corrigé par un correcteur + amplificateur de fonction de transfert C(p) pour fournir l intensité de commande i(t) au moteur.")

16 VI Synthèse Q34. En vous servant du schéma-bloc de la figure 10 page 7, rappeler en deux ou trois phrases le principe de commande des vérins ou d obtention d une loi de tangage donnée. Un essai est réalisé sur le système en situation pour une consigne d accélération en trapèze. On mesure à l aide d un accéléromètre l accélération en un point du siège mis en mouvement par les vérins. On obtient la courbe de la figure 18 avec les accélérations en m s 2. Accélération (m s 2 ) Temps (s) Figure 18 Comparaison des réponses simulées et expérimentales en fonction du temps (s) Q35. Commenter l allure des accélérations simulée et mesurée par rapport à l accélération de consigne. Indiquer une source de différences compte-tenu des explications données à la question précédente. La figure 19 rappelle la démarche de l ingénieur qui consiste à caractériser les écarts entre 3 domaines (celui du cahier des charges (jeu), de l expérience et de la modélisation). Cahier des charges Ecart 1 Ecart 3 Expériences (prototype) Ecart 2 Figure 19 Démarche de l ingénieur Modélisation Simulation αc(p) Ka I(p) + C(p) Hm(p) Q36. Indiquer à quelle(s) question(s) de la partie IV, les écarts 1 à 3 ont été caractérisés. Préciser les critères de performances définis dans le cahier des charges relatif à la fonction FT3 qui ont été analysés dans ces questions. Fin de l énoncé 16/16 Kc θm(p) kt α(p) IMPRIMERIE NATIONALE D après documents fournis

17 PSIS07 Document Réponse énergie électrique (E) (E) (E) Acquérir unité centrale (E) Communiquer... informations visuelles et sonores ordres ordres (E) Alimenter et communiquer... énergie Convertir... déplacements Joueur Agir... Joueur ayant des sensations DR 1 SADT de niveau A0 du simulateur de course 1/4 B

")




18 10 Gain (db) Phase ( ) Pulsation (rad s 1 ) Pulsation (rad s 1 ) DR 2 Diagrammes de Bode du filtre de fonction de transfert H mov1 (p) = τp 1+τp #» z 0 #» y 0 A a A b #» x 0 B a O B b DR 3 Schéma cinématique de la structure articulée 2/4

19 Déplacement vérin a Déplacement vérin b Mouvement du siège tangage (sens direct) roulis (sens direct) DR 4 Tableau du mouvement du siège en fonction du déplacement des vérins. DR 5 Longueur du vérin et angle β en fonction de l angle α 3/4

20
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Voyez la réponse à cette question dans ce chapitre. www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
 Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
Une échelle est appuyée sur un mur. S il n y a que la friction statique avec le sol, quel est l angle minimum possible entre le sol et l échelle pour que l échelle ne glisse pas et tombe au sol? www.hometownroofingcontractors.com/blog/9-reasons-diy-rednecks-should-never-fix-their-own-roof
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
DYNAMIQUE DE FORMATION DES ÉTOILES
 A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
A 99 PHYS. II ÉCOLE NATIONALE DES PONTS ET CHAUSSÉES, ÉCOLES NATIONALES SUPÉRIEURES DE L'AÉRONAUTIQUE ET DE L'ESPACE, DE TECHNIQUES AVANCÉES, DES TÉLÉCOMMUNICATIONS, DES MINES DE PARIS, DES MINES DE SAINT-ÉTIENNE,
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Q6 : Comment calcule t-on l intensité sonore à partir du niveau d intensité?
 EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
EXERCICE 1 : QUESTION DE COURS Q1 : Qu est ce qu une onde progressive? Q2 : Qu est ce qu une onde mécanique? Q3 : Qu elle est la condition pour qu une onde soit diffractée? Q4 : Quelles sont les différentes
TRAVAUX PRATIQUES SCIENTIFIQUES SUR SYSTÈME
 Baccalauréat Professionnel SYSTÈMES ÉLECTRONIQUES NUMÉRIQUES Champ professionnel : Alarme Sécurité Incendie SOUS - EPREUVE E12 TRAVAUX PRATIQUES SCIENTIFIQUES SUR SYSTÈME Durée 3 heures coefficient 2 Note
Baccalauréat Professionnel SYSTÈMES ÉLECTRONIQUES NUMÉRIQUES Champ professionnel : Alarme Sécurité Incendie SOUS - EPREUVE E12 TRAVAUX PRATIQUES SCIENTIFIQUES SUR SYSTÈME Durée 3 heures coefficient 2 Note
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Items étudiés dans le CHAPITRE N5. 7 et 9 p 129 D14 Déterminer par le calcul l'antécédent d'un nombre par une fonction linéaire
 CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
TD 9 Problème à deux corps
 PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
PH1ME2-C Université Paris 7 - Denis Diderot 2012-2013 TD 9 Problème à deux corps 1. Systèmes de deux particules : centre de masse et particule relative. Application à l étude des étoiles doubles Une étoile
Automatique (AU3): Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr
: Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr") Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Soit la fonction affine qui, pour représentant le nombre de mois écoulés, renvoie la somme économisée.
 ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX
 SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.
 PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Mesures et incertitudes
 En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
BACCALAURÉAT PROFESSIONNEL EPREUVE DE TRAVAUX PRATIQUES DE SCIENCES PHYSIQUES SUJET A.1
 TP A.1 Page 1/5 BACCALAURÉAT PROFESSIONNEL EPREUVE DE TRAVAUX PRATIQUES DE SCIENCES PHYSIQUES SUJET A.1 Ce document comprend : - une fiche descriptive du sujet destinée à l examinateur : Page 2/5 - une
TP A.1 Page 1/5 BACCALAURÉAT PROFESSIONNEL EPREUVE DE TRAVAUX PRATIQUES DE SCIENCES PHYSIQUES SUJET A.1 Ce document comprend : - une fiche descriptive du sujet destinée à l examinateur : Page 2/5 - une
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
PROJET de Sciences Industrielles pour l ingénieur
 SESSION 2013 TSIPR08 EPREUVE SPECIFIQUE - FILIERE TSI " PROJET de Sciences Industrielles pour l ingénieur Durée : 6 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision
SESSION 2013 TSIPR08 EPREUVE SPECIFIQUE - FILIERE TSI " PROJET de Sciences Industrielles pour l ingénieur Durée : 6 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
BACCALAURÉAT GÉNÉRAL SESSION 2012 OBLIGATOIRE MATHÉMATIQUES. Série S. Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE
 BACCALAURÉAT GÉNÉRAL SESSION 2012 MATHÉMATIQUES Série S Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE Les calculatrices électroniques de poche sont autorisées, conformément à la
BACCALAURÉAT GÉNÉRAL SESSION 2012 MATHÉMATIQUES Série S Durée de l épreuve : 4 heures Coefficient : 7 ENSEIGNEMENT OBLIGATOIRE Les calculatrices électroniques de poche sont autorisées, conformément à la
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
PHYSIQUE Discipline fondamentale
 Examen suisse de maturité Directives 2003-2006 DS.11 Physique DF PHYSIQUE Discipline fondamentale Par l'étude de la physique en discipline fondamentale, le candidat comprend des phénomènes naturels et
Examen suisse de maturité Directives 2003-2006 DS.11 Physique DF PHYSIQUE Discipline fondamentale Par l'étude de la physique en discipline fondamentale, le candidat comprend des phénomènes naturels et
TP 03 B : Mesure d une vitesse par effet Doppler
 TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
BACCALAURÉAT PROFESSIONNEL ÉPREUVE DE MATHEMATIQUES. EXEMPLE DE SUJET n 2
 Exemple de sujet n 2 Page 1/7 BACCALAURÉAT PROFESSIONNEL ÉPREUVE DE MATHEMATIQUES EXEMPLE DE SUJET n 2 Ce document comprend : Pour l examinateur : - une fiche descriptive du sujet page 2/7 - une fiche
Exemple de sujet n 2 Page 1/7 BACCALAURÉAT PROFESSIONNEL ÉPREUVE DE MATHEMATIQUES EXEMPLE DE SUJET n 2 Ce document comprend : Pour l examinateur : - une fiche descriptive du sujet page 2/7 - une fiche
BTS Groupement A. Mathématiques Session 2011. Spécialités CIRA, IRIS, Systèmes électroniques, TPIL
 BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
E/ECE/324/Rev.1/Add.12/Rev.7/Amend.4 E/ECE/TRANS/505/Rev.1/Add.12/Rev.7/Amend.4
 6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
Génie Industriel et Maintenance
 Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE
 ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION)
") Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Chapitre 2 Le problème de l unicité des solutions
 Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
Université Joseph Fourier UE MAT 127 Mathématiques année 2011-2012 Chapitre 2 Le problème de l unicité des solutions Ce que nous verrons dans ce chapitre : un exemple d équation différentielle y = f(y)
André Crosnier LIRMM 04 67 41 86 37 crosnier@lirmm.fr. ERII4, Robotique industrielle 1
 André Crosnier LIRMM 04 67 41 86 37 crosnier@lirmm.fr ERII4, Robotique industrielle 1 Obectifs du cours 1. Définitions et terminologie 2. Outils mathématiques pour la modélisation 3. Modélisation des robots
André Crosnier LIRMM 04 67 41 86 37 crosnier@lirmm.fr ERII4, Robotique industrielle 1 Obectifs du cours 1. Définitions et terminologie 2. Outils mathématiques pour la modélisation 3. Modélisation des robots
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
Premier ordre Expression de la fonction de transfert : H(p) = K
 = K") Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Baccalauréat ES Amérique du Nord 4 juin 2008
 Baccalauréat ES Amérique du Nord 4 juin 2008 EXERCICE 1 Commun à tous les candidats f est une fonction définie sur ] 2 ; + [ par : 4 points f (x)=3+ 1 x+ 2. On note f sa fonction dérivée et (C ) la représentation
Baccalauréat ES Amérique du Nord 4 juin 2008 EXERCICE 1 Commun à tous les candidats f est une fonction définie sur ] 2 ; + [ par : 4 points f (x)=3+ 1 x+ 2. On note f sa fonction dérivée et (C ) la représentation
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F)
") PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
1 Problème 1 : L avion solaire autonome (durée 1h)
") Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
(ANALYSE FONCTIONNELLE ET STRUCTURELLE)
") DOSSIER (ANALYSE FONCTIONNELLE ET STRUCTURELLE) Diagramme pieuvre. Diagramme F.A.S.T. Nomenclature Dessin d ensemble Vue éclatée Ce dossier comprend : 1. Recherche du Besoin Fondamental du Produit A qui
DOSSIER (ANALYSE FONCTIONNELLE ET STRUCTURELLE) Diagramme pieuvre. Diagramme F.A.S.T. Nomenclature Dessin d ensemble Vue éclatée Ce dossier comprend : 1. Recherche du Besoin Fondamental du Produit A qui
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
EXPLOITATIONS PEDAGOGIQUES DU TABLEUR EN STG
 Exploitations pédagogiques du tableur en STG Académie de Créteil 2006 1 EXPLOITATIONS PEDAGOGIQUES DU TABLEUR EN STG Commission inter-irem lycées techniques contact : dutarte@club-internet.fr La maquette
Exploitations pédagogiques du tableur en STG Académie de Créteil 2006 1 EXPLOITATIONS PEDAGOGIQUES DU TABLEUR EN STG Commission inter-irem lycées techniques contact : dutarte@club-internet.fr La maquette
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
SECTEUR 4 - Métiers de la santé et de l hygiène
 SECTEUR 4 - Métiers de la santé et de l hygiène A lire attentivement par les candidats Sujet à traiter par tous les candidats inscrit au BEP Les candidats répondront sur la copie. Les annexes éventuelles
SECTEUR 4 - Métiers de la santé et de l hygiène A lire attentivement par les candidats Sujet à traiter par tous les candidats inscrit au BEP Les candidats répondront sur la copie. Les annexes éventuelles
BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE SUJET
 SESSION 2011 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel(s)
SESSION 2011 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel(s)
REGLEMENT DU CHAMPIONNAT DE FRANCE DES RALLYES MOTO 2015
 REGLEMENT DU CHAMPIONNAT DE FRANCE DES RALLYES MOTO 2015 CATEGORIES MOTOS ANCIENNES ET CLASSIQUES Article 1 CATEGORIES, TITRES ET RECOMPENSES 1.1 Généralités : Les catégories Motos Anciennes et Motos Classiques
REGLEMENT DU CHAMPIONNAT DE FRANCE DES RALLYES MOTO 2015 CATEGORIES MOTOS ANCIENNES ET CLASSIQUES Article 1 CATEGORIES, TITRES ET RECOMPENSES 1.1 Généralités : Les catégories Motos Anciennes et Motos Classiques