Systèmes temps réel: langages de programmation de systèmes temps réel
|
|
|
- Michel Dubé
- il y a 10 ans
- Total affichages :
Transcription
1 Systèmes temps réel: langages de programmation de systèmes temps réel Claire Pagetti IN ENSEEIHT - Département Télécommunication et Réseaux 2, rue Camichel, Toulouse 1 Objectifs du cours Introduction au temps réel: Qu est-ce qu un système temps réel? Exemples de langages de programmation temps réel SDL (System Description Language) Lustre Scade Introduction aux automates temporisés C. Pagetti Introduction aux RTOS J. Ermont Introduction à l ordonnancement J.-L. Scharbarg i 2
 Lustre Scade Introduction aux automates")
2 Plan du cours Cours 1: Introduction générale aux systèmes temps réel et aux problématiques de conception Cours 2-3: Langage Lustre Cours 4: RTOS Séances 5-7: TP RTOS / Lustre Cours 6: Langage SDL Cours 8 10: Automates temporisés Séance 11: TP sur UPPAAL Notation: Examen final le 25 mai h 3 Plan 1. Partie I - Introduction générale aux systèmes temps réel et aux problématiques de conception 2. Partie III Langage Lustre: syntaxe, sémantique et preuve 3. Partie II - SDL 4. Partie IV Introduction aux automates temporisés 4

3 Partie I - Introduction générale aux systèmes temps réel 1. Système temps réel 1. Définitions 2. Exemple réel 2. Architecture des systèmes temps réel 3. Calcul du WCET 4. Problématiques de conception des systèmes temps réel 5. Un peu de POSIX Introduction La plupart des machines inventées par l homme nécessitent un système de régulation ou de contrôle pour fonctionner Ces systèmes de contrôle existaient avant l invention des ordinateurs Exemple: Pour maintenir une locomotive à vitesse constante, un système régule la quantité de vapeur. En descente, il faut injecter moins de vapeur et en montée, il faut en injecter davantage Automatisation: réduire l intervention humaine 6


4 1.1 Première définition Est appelé temps réel le comportement d un système informatique dont le fonctionnement est assujetti à l évolution dynamique d un procédé industriel connecté à lui. On dit que le processus est contrôlé, piloté ou supervisé par le système qui réagit aux changements d état du processus. Processus industriel à contrôler Machine outil robot mesure Système informatique pilotant capteurs continu production wagon événements commande actionneurs Calcul des ordres en temps 7 Historique début années 60 Le premier système moderne embarqué temps réel reconnaissable a été l Apollo Guidance Computer, le système de guidage de la mission lunaire Apollo, développé par Charles Stark Draper du Massachusetts Institute of Technology. Premier ordinateur à avoir recours aux circuits intégrés Utilisé en temps réel par l'astronaute pilote pour recueillir et fournir des informations de vol, et pour le contrôle automatique de toutes les fonctions de navigation du vaisseau spatial. La mémoire utilise des mots de 16 bits : elle est composée de 64 ko ( mots) de mémoire morte contenant l'ensemble des programmes et de 4 ko (2 000 mots) de mémoire vive (effaçable) utilisée par les traitements. Les deux types de mémoire sont constituées de tores magnétiques : les programmes sont implantés dans l'ordinateur à la fabrication. Le processeur lui est constitué de plus de portes NOR réalisé à l'aide de circuits intégrés. Il pèse environ 35 kg. Source: 8

5 Embedded system market Over 4 billion embedded processors were sold last year and the global market is worth 60 billion with annual growth rates of 14%. Forecasts predict more than 16 billion embedded devices by 2010 and over 40 billion by Embedded computing and electronics add substantial value to products. Within the next five years, the share of embedded systems are expected to increase substantially in markets such as automotive (36%), industrial automation (22%), telecommunications (37%), consumer electronics (41%) and health/medical equipment (33%). The value added to the final product by embedded software is much higher than the cost of the embedded device itself. For example, in the case of a modern car, by 2010 over 35% of its value will be due to embedded electronics. [ARTEMIS JU Organisation ] 9 Temps réel aller vite besoin d'un temps de réaction court (1 ms) pour le contrôle d'unavion de combat besoin d'un temps de réaction moins court (10 ms) pour le contrôle d'un avion de transport civil besoin d'un temps de réaction moins court (1s) pour une IHM besoin d'un temps de réaction moins court (1mn) pour le contrôled'un chaîne de production (lente) besoin d'un temps de réaction moins court (1h) pour le contrôle d'une réaction chimique (lente) besoin d'un temps de réaction de quelques heures pour l'établissement d'une prévision météorologique besoin d'un temps de réaction de quelques jours pour le calcul de la paie => l'important est de respecter l'échéance => un résultat juste hors délai peut être inutilisable et considéré comme une faute. 10
 and health/medical equipment (33%). The value added to the final product by embedded software is much higher than the cost of the embedded device itself.")
6 Control-command Command: Laws which govern the dynamical evolution of a system Command of actuators regarding the sensors In continuous time Examples: Regulation of a liquid level between thresholds Command of flight surfaces inputs system state outputs Equations of state dx = f(x,u) y = h(x) command x internal state, y output, u input Command a system = make the system evolve in order to reach a particular configuration or to follow a given trajectory 11 Boucle d asservissement u(t) distance time u(t) process d(t) vitesse: d(distance) v = dt hold sampler u k D-A computer A-D d k u k v k d = k d T k 1 d k Temps discret du calculateur Ordre élévateur T période d échantillonnage 12
 vitesse: d(distance) v = dt hold sampler u k D-A computer A-D d k u k v k d = k d T k 1 d k Temps discret du calculateur Ordre élévateur T période d")
7 Exemple: commande d un procédé continu Régulation du niveau d un liquide: Contrôle du niveau de façon à respecter un ordre de l opérateur Respecter le niveau toléré commande Détecteur de niveau Instrument de mesure du niveau événement mesure 13 Temps réel dur et mou Deux notions de criticité face au manquement d'une échéance Contraintes temps réel strictes : le dépassement d'une échéance est catastrophique Contraintes temps réel relatives: le dépassement d'une échéance peut être toléré (dans une certaine mesure) Temps réel dur/ temps réel lâche! Conséquences => dans le cas des systèmes temps réel dur, on cherchera à être prévisible, déterministe et fiable => utilisation de techniques mathématiques (ordonnancement, évaluation des pires cas ) => dans le cas des systèmes temps réel lâche, on chercheraà minimiser la probabilité de rater une échéance plusieurs fois de suite... 14
")
8 Définitions Prédictibilité (predictability): Les performances de l application doivent être définies dans tous les cas possibles de façon à assurer le respect des contraintes de temps. On parle de pire cas. Déterminisme (determinism): Il n y a aucune incertitude sur le comportement du système: pour un contexte donnéle comportement est toujours le même. Fiabilité (reliability): Capacité d un système à réaliser et maintenir ses fonctionnalités dans des conditions normales d utilisation. En temps réel, la fiabilité concerne le respect des contraintes temps réel. On peut également vouloirque le système reste fiable même si certaines pannes sont apparues, on parle alors de tolérance aux fautes Exemple d un système temps réel dur: les commandes de vol d un aéronef Vertical CG Z Y North X East 16


, pedals, throttle controls transmitting and")
9 Contrôle de l aéronef pitch roll roll pitch yaw yaw 17 Flight control system The aircraft primary flight control systemis the set of elements between the stick and the surfaces which aim at controlling the attitude, the trajectory and the speed of the aircraft. The system is composed of: piloting elements: stick (or yoke or control column), pedals, throttle controls transmitting and computing organs cables and calculators (for fly-by-wire) sensors, actuators and servocommand to command the surfaces 18
, pedals, throttle controls transmitting and")







10 Système de commande de vol (CDV) 19 (Some) Aircraft sensors GPS altimeter: measure the altitude of an object above a fixed level inertial measurement unit is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. An attitude indicator, also known as gyro horizon or artificial horizon, is an instrument used in an aircraft to inform the pilot of the orientation of the aircraft relative to earth. It indicates pitch and roll. A weather vane, also known as a peach patrolwind vane or weathercock, is an instrument for showing the direction of the wind. A pitot tube is a pressure measurement instrument used to measure fluid flow velocity 20

 2 redundant calculators for the ailerons, the elevators and the trim (ELAC1-2), replaced in case of failure by the SEC1-2-3")
11 A320 flight controls systems Fly-by-wire system 9 calculators Functions allocation : 2 redundant calculators for the slats and the flaps (SFCC1-2) 2 redundant calculators for the rudder (FAC1-2) 3 redundant calculators the spoilers, the elevators and the trim(sec1-2-3) 2 redundant calculators for the ailerons, the elevators and the trim (ELAC1-2), replaced in case of failure by the SEC1-2-3 Safety requirements each calculator must be "fail-silent" each calculator must have a failure rate less than 10-3 per flight hour A320 flight controls systems architecture 22

12 Reconfiguration policies ELAC 1 ELAC 2 SEC 1 SEC 2 SEC 3 GND-SPL GND-SPL Redundancies allocation LAF Roll SPD-BRK SPD-BRK Roll LAF L. Ail G Y B Y G G Y B Y G R. Ail B G B G ELAC 1 2 Normal Control 1 2 ELAC SEC Normal Control SEC SEC 2 Standby Control 2 SEC Trimmable Horizontal Stabilizer Actuator B Hydraulic blue system G Hydraulic green system Y Hydraulic yellow system B G G Y Y G GND-SPL: Ground Spoiler SPD-BRK: Speed Brake LAF: Load Alleviation Function ELAC 1 2 SEC 3 2 Motor ELAC 2 3 SEC 23 Plan 1. Systèmes temps réel 2. Architecture des systèmes temps réel 1. Architecture matérielle 2. Comportement fonctionnel 3. Support exécutif 3. Calcul de WCET 4. Problématiques de conception de systèmes temps réel 5. Un peu de POSIX 24

13 2.1 Architectures matérielles Système informatique données mesures événements Environnement Peut être réalisé par commandes un automate programmable un circuit spécifique (ASIC) un calculateur (monoprocesseur) un système multiprocesseur à mémoire commune un système réparti Architecture multiprocesseur memory memory Acquisition, alarm, emission Command Architecture master-slayer operator 26

14 Architecture distribuée Control of the level Solution P2 Solution P Regulation of quantities of P and P2 Communication network Reulation of tempreraure Programmer des systèmes temps réel Difficultés classiques de programmation auxquelles s ajoutent les difficultés de gestion du temps Datation des signaux Ordre d exécution des actions Attente d un signal pendant un délai Et: le monde est plein de délais, d échéances, de dérives d horloge Exemple typique: Dans un contexte où les actions prennent un certain temps, comment doit être interprétée une absence d information? L absence peut être due à: un délai une absence réelle Une incompréhension de la situation 28

15 2.2 Architecture fonctionnelle Fonctionnement général : boucle infinie Tant que TOUJOURS faire Acquisition des entrées (données capteurs, mesures ) Calcul des ordres à envoyer au procédé Émission des ordres Fin tant que Mais, deux modes de fonctionnement : fonctionnement cyclique(time driven ou système "synchrone" (mais pas le même "synchrone" que les langages "synchrones")) fonctionnement événementiel (event driven) => fonctionnement mixte : à base de traitements périodiques et et apériodiques (déclenchés sur événements) 29 Fonctionnement cyclique Scrutation périodique d'une mémoire d'entrée (polling) échantillonnage des entrées sur l'horloge du système activation du système à chaque top d'horloge Mais : A chaque top d'horloge faire Lecture de la mémoire des entrées Fin Calcul des ordres à envoyer au procédé Émission des ordres système peu "réactif" si l'environnement produit des informations à des fréquences différentes => oblige à prévoir toutes les réactions du système dans la même boucle => problème de performance => ou oblige à imbriquer des boucles de fréquences multiples => difficultés de réalisation, de lisibilité du code, d'évolution 30
 échantillonnage des entrées sur l'horloge du système activation du système à chaque top d'horloge Mais : A chaque top d'horloge faire Lecture de la mémoire des entrées Fin Calcul")
16 Chronogramme d une implémentation cyclique Régulation du niveau et de la température d un liquide Evénements: H (for high), L (for low), C (for cold) and W (warm) fill empty cool warm events C L W H time 31 Fonctionnement événementiel Activation du système à chaque événement (=> notion d'interruption) A chaque interruption faire Lecture de l'information arrivée activation du traitement correspondant Émission des ordres issus de ce traitement Fin Mais : que faire si une interruption survient alors que le système est en train de traiter une interruption précédente? => notion de priorité des interruptions => notion de "tâche" associée à une ou plusieurs interruptions => mécanisme de préemption et de reprise de tâche => gestion de l'exécution concurrente des tâches (ordonnancement) => Un système temps réel est souvent un système multitâche incluant un gestionnaire de tâches (Ordonnanceur) 32

17 Chronogramme d une implémentation événementielle Régulation du niveau et de la température d un liquide Events: H (for high), L (for low), C (for cold) and W (warm) Priorités: 2, 2, 1, 1 fill empty cool. warm. events C L W H time 33 Ressources Ressource: Entité utilisée par un système informatisé pour un bon fonctionnement Physique: capteurs, actionneurs, périphériques Logique: donnée dans une mémoire, code Ressource partagée: Ressource potentiellement partagées par plusieurs tâches qui peuvent d exécuter en parallèle. Besoin de cohérence de la ressource. Ressource critique: Accès par au plus une tâche à la fois. Besoin de mécanisme d exclusion mutuelle de la ressource(sémaphore, ) Section critique: Zone du code où une tâche fait un accès à une ressource partagée critique. 34

18 Ressource partagée empty cool. events W H Quand elle est interrompue, la tâche cool était en train d accéder à une ressource partagée (par exemple une mémoire). Il y a donc un conflit. => Une solution: interdiction de préempter une tâche quand elle utilise une ressource partagée critique. empty cool. events W H W H 35 Priority inversion τ 1 t shared resource τ 1 > τ 2 > τ 3 τ t Request for the resource τ t Priority inversion 36


19 Example: Sojourner The Sojourner rover was the second space exploration rover to successfully reach another planet, and the first to actually be deployed on another planet. Sojourner landed on Mars as part of the Mars Pathfinder mission on July 4, Priority inversion: Even though NASA knew the problem, because it already occurred on all the test that had been performed. But NASA thought it won't be a problem because on earth the situation didn't occur very often, NASA only underestimated the number of situations the problem appeared. [ Robert Franz. Advanced Course Seminar Analysis of computer bugs, Priority Inversion Mars Sojourner Exemple: algorithme de Peterson Processus P0 flag[0] = 1 turn = 1 while(flag[1] && turn == 1); // do nothing // critical section... flag[0] = 0 Processus P1 flag[1] = 1 turn = 0 while(flag[0] && turn == 0); // do nothing // critical section... flag[1] = 0 L'algorithme de Petersonest un algorithme d'exclusion mutuelle àbase d attente active permettant à deux processus de partager une ressource sans conflit. L algorithme utilise deux variables, flag et turn. flag = 1 indique que le processus veut accéder àla section critique. La variable turnvaut l identitédu processus qui l utilise. L entrée dans la section critique est assurée pour le processus P0 si P1 ne veut pas entrer dans la section critique ou si P1 a donnéla priorité àp0 en mettant turn à0. 38


20 Exemple: Drone Paparazzi Pararazzi est un projet opensource pour programmer des drones (ou UAV pour Unmanned Air Vehicle System). Développé à l ENAC. L environnement fournit le code pour: -la maquette -maquette du commerce de 250 g à 1.4 kg et de 0.3m à 1.4 m. -le simulateur de vol 39 Exemple: drone Paparazzi 40



21 Architecture hardware 41 Architecture fonctionnelle 42

22 Code de la boucle d exécution Support exécutif temps réel Solution la plus simple: application nue sur le calculateur Tasks Library Kernel CPU Polling des données Librairies de fonctions déterministes Séquencement à la main des tâches 44
23 Solution avec un exécutif temps réel Application measures Task Task Task Task commands Services calls clock events from the process Time handler Events handler Scheduler Tasks handler 1/ input/output management interruption handler input/output interface handler 2/ tasks scheduling Executive organisation of the nominal functioning mode changes 3/ relations between tasks synchronisation, communication access to a resource in mutual exclusion time handler (counter, watchdog) 45 OS temps réel OS pour le temps réel dur Gestion précise des priorités Exécution en temps borné des primitives système (interruptions, sémaphores ) Pas de mémoire virtuelle Minimisation des «overhead» (temps pris par le système pour exécuter et surveiller son propre comportement) OS pour le temps réel mou Extension des OS classiques (comme UNIX..) Extension des ordonnancements temps réel Processus légers Préemption 46
24 Coopération entre tâche et ordonnancement : exemple Configuration : (3 tâches) tâche τ 1 WAIT_EVT(evt1) tâche τ 2 SIGNAL_EVT(evt1) tâche τ 3 WAIT_EVT(evt2) DELAY(1s) SIGNAL_EVT(evt2) Ordonnancement Prio(τ 1 )=2 - Prio(τ 2 )=1 - Prio(τ 3 )=3 Wait evt1 End of task tâche τ 1 t Signal evt1 Signal evt2 and end tâche τ 2 t tâche τ 3 Wait evt2 Wait 1 s 1 s End of task t Tâche de fond t 47 Coopération entre tâches Synchronisation: Evénements (attente d un événement, envoi d un événement) Sémaphore (Demander / Libérer un sémaphore) Rendez-vous Task i Task j Communication Boîte à lettres(écrire / lire une donnée) Task i Task j xxx Partage de ressources critiques Sémaphore en exclusion mutuelle Task i R Task j 48
![Marché pour les OS temps réel [TIM00] M. Timmerman. «RTOS Market survey : preliminary result». Dedicated System Magazine, (1):6 8, January 2000.](/docs-images/17/159052/images/25-0.png "49 Exemple: APEX Arinc 653 Arinc (Aeronautical Radio, Incorporated) créé en 1929, est une société détenue par les principales compagnies aériennes et des constructeurs aéronautiques américains qui")
25 Marché pour les OS temps réel [TIM00] M. Timmerman. «RTOS Market survey : preliminary result». Dedicated System Magazine, (1):6 8, January Exemple: APEX Arinc 653 Arinc (Aeronautical Radio, Incorporated) créé en 1929, est une société détenue par les principales compagnies aériennes et des constructeurs aéronautiques américains qui est connue pour détenir les principaux standards de communications à l'intérieur des aéronefs et entre les aéronefs et le sol. Publication du premier standard ARINC 653 : été 1996 Premiers travaux : 1991 Arinc 653: Application programming interface (API) entre un OS d une ressource avionique et une application. L implémentation Airbus s appelle l APEX (APplication / EXecutive) 50
26 Fonctionnement de l A653 Partition 1 p11 p1n Partition 2 p21 p2n Partition 2 p31 p3n APEX OPERATING SYSTEM Hardware Operating system : Schedule the module partitions Schedule the processes of each partition Ensure segregation (partitioning) spatially and temporally 51 Partage des ressources Ségrégation spatiale: Zone mémoire allouée statiquement pour chaque partition. Ségrégation temporelle (CPU) : Une partition n a pas de priorité Attribution déterministe et cyclique du CPU à chaque partition: => OS répète le cycle de base de durée fixe (MAjor time Frame: MAF) => Allocation d un slot de temps de la MAF pour chaque partition Base cycle MAF T Part 1 Part 2 Part 3 Part 1 Part 3 Part 2 Part 3 T+1 time Time slots for partition 1 Time slots for partition 2 Time slots for partition 3 L allocation des ressources se fait statiquement hors ligne et ne peut être modifiée. 52
27 Partie I - Introduction générale aux systèmes temps réel 1. Système temps réel 2. Architecture des systèmes temps réel 3. Calcul du WCET 1. Méthode d analyse statique 2. Implantation prédictible sur multi-cœurs 3. Et la suite? 4. Problématiques de conception des systèmes temps réel 5. Un peu de POSIX 53 The WCET Problem Given the code for a software task the platform (OS + hardware) that it will run on Determine the WCET of the task. Can the WCET always be found? In general, no, because the problem is undecidable. Usual restrictions in embedded systems (to ease the estimation) loops with finite bounds no recursion no dynamic memory allocation no goto statements single-threaded if possible 54
; difficulty to simulate behavior of environment.")
28 Methods Measuring: Compile, link and download onto target CPU Hook up logic analyzer or oscilloscope or use built in registers Run the code with test inputs, and record execution times Take the maximum as WCET No guarantee to hit the worst case! Simulation: Various levels of precision possible (cycle accurate, instruction accurate); difficulty to simulate behavior of environment. Analysis: Compute estimate of run time, based on program analysis and model of target hardware 55 Overview of the methods results WCET: The longest time taken by a software task to execute => Function of input data and environment conditions 56
29 Influence of input size Instruction execution time can be different MUL (multiply) can take a variable # clock cycles, depending on input size Control flow (while, for loops) can run for variable number of iterations Parameters: A positive integer, n. Returns: The sum of the integers from 1 to n. { sum := 0; for i := 1 upto n { sum := sum + i;} return sum;} 57 WCET computation by static analysis source code N = input even = 0; odd = 0; for (i=0 ; i<n ; i++) { if (i%2 == 0) even++; else odd++; compiler binary code CFG extraction C A B D flow analysis E low level analysis Linear program max T=x A.c A + x B.c B + x C.c C + x D.c D + x E.c E x A = 1 x A = x AB x B = x AB + x EB x B = x BC + x BD x C = x BC x C = x CE x D = x BD x D = x DE x E = x CE + x DE x E = 1 + x EB c A = ; c B = ; c C = ; c D = ; c E = ; x EB 255; x BC 0.5 x B ; ILP solver solution Tmax = (WCET) with: x A = x B = x C = x D = x E = [Rochange2012] 58
 Example test.c int ex(int n) { int i, s=0; for(i=0; i< n; i++){ s+=i; } return s; } BB1 BB3 terminal >gcc c g lrm test.c >dissy test.")
30 Control flow graph (CFG) Nodes represent basic blocks. A Basic Block (BB) is piece of code with a single entry point and a single exit point, with no branching in-between. Edges represent flow of control (jumps, branches, calls,...) Example test.c int ex(int n) { int i, s=0; for(i=0; i< n; i++){ s+=i; } return s; } BB1 BB3 terminal >gcc c g lrm test.c >dissy test.o Deassemble the code BB2 BB4 59 CFG - example CFG idea B1: int i, s=0; i=0; test.c int ex(int n) { int i, s=0; for(i=0; i< n; i++){ s+=i; } return s; } Generated CFG B1: 0x000005e 0x B2: i < n B2: 0x x b B4: return s; B3: s+=i; i++; B4: 0x000008d 0x B3: 0x000007b 0x
31 Identification of the longest path in a CFG CFG can have loops, how to infer loop bounds? unroll loops, resulting in directed acyclic graph (DAG) construct system of equations Example x i # times Bi is executed d ij # times edge is executed C i WCET of B i B1: d 01 int i, s=0; i=0; x 1 d 12 maximize i C i x i subject to flow constraints d 01 = 1 x 1 = d 01 = d 12 x 2 = d 12 +d 32 = d 24 +d 23 x 3 = d 23 = d 32 = n x 4 = d 24 = d 40 =1 designer must give an upper bound of n x4 d 24 B4: return s; d 40 B2: i < n d 23 x 2 d 32 B3: s+=i; i++; x 3 61 Computation of basic blocks WCET Require to make a micro-architecture modeling perform a cycle-wise evolution of the pipeline, determining all possible successor pipeline states Model of the behaviour of the architecture Pipeline Determine each instruction s worst case effectiveexecution time by looking at its surrounding instructions within the same basic block. branch prediction Predict which branch to fetch (ex static, always then for an if) Data dependent instruction execution times caches in case of multicore, common bus Read the processor handbook 62

32 Example - micro architectural analysis Let us consider the following processor architecture and basic block i0: load A r0 i1: add r0 r1 r0 i2: mul r3 r2 r3 fetch decode issue IU1 IU2 LSU complete scenario 1 A in the L1D scenario 1 A not in L1 and not in L2 63 Partie I - Introduction générale aux systèmes temps réel 1. Système temps réel 2. Architecture des systèmes temps réel 3. Calcul du WCET 1. Méthode d analyse statique 2. Implantation prédictible sur multi-cœurs 3. Et la suite? 4. Problématiques de conception des systèmes temps réel 5. Un peu de POSIX 64
33 WCET for multicore COTS Multicore COTS are unpredictable 1. the shared internal bus access 2. the cache coherency 3. limited available documentation 4. not enough monitoring applications 5. No timing-composability on COTS core read a core read b L1D L1I L1D L1I L2 L2 interconnect memory controller RAM core write b core read b L1D L1I L1D L1I L2 L2 interconnect memory controller RAM Current solution Use of an execution model Set of rules to avoid or reduce the unpredictable behaviours Develop a bare-metal library Bare-metal: low-level programming method for high-performance and realtime computing bypass OS minimal footprint Implementation of the execution model rules Idea is to reduce the problem to a well known problem (uni-processor case) A. Schranzhofer, J.-J. Chen, and L. Thiele, Timing analysis for TDMA arbitration in resource sharing systems, in 16th IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS 2010), Stockholm, Sweden,
, 2011. - E. Betti, S. Bak, R. Pellizzoni, M. Caccamo, and L. Sha.")
34 Current solutions PREM (predictable execution model) - R. Pellizzoni, E. Betti, S. Bak, G. Yao, J. Criswell, M. Caccamo, and R. Kegley.A predictable execution model for COTS-based embedded systems. In 17th IEEE Real- Time and Embedded Technology and Applications Symposium (RTAS 2011), E. Betti, S. Bak, R. Pellizzoni, M. Caccamo, and L. Sha. Real-time i/o management system with cots peripherals. IEEE Trans. Computers, 62(1):45 58, Time-triggered execution model F. Boniol, H. Cassé, E. Noulard, C. Pagetti: Deterministic Execution Model on COTS Hardware. In 25th International Conference on Architecture of Computing Systems (ARCS 2012), Core 1 Core Feb. 5th ERTS Exemple d implantation prédictible sur multicoeur 68
 Trajectory Computation along the flight plan Translation into Guidance Information for the autopilot Strong safety-critical constraints Hard real-time requirements Periodic and Aperiodic")

35 Avionic use case: Flight Management System (FMS) Computer system specific to civil & military avionic responsible of: Management of the flight plan Localization(through various sensors & radio navigation) Trajectory Computation along the flight plan Translation into Guidance Information for the autopilot Strong safety-critical constraints Hard real-time requirements Periodic and Aperiodic tasks 69 FMS Software Architecture Functional groups Description Periodic Aperiodic Sensors Gather sensor data from devices 1 4 Localization Estimate the airplane location from sensors 4 3 Flightplan Deals with flight route the plane should follow 0 7 Trajectory Compute a trajectory to tangent the route 5 0 Guidance Translate trajectory into angle modifications 2 0 Nearest List nearest airports for emergency landing

 Data size Output size LocA1 9012 200 136 LocA2 9216 224 328 LocA3 9524 224 328 71 Texas Instruments TMS320C6678 8 TMS320C66x DSP processors clocked")
36 Localization group Communication: Blackboard: single-writer / multiplereader double-buffer Mailbox: single-writer / single-reader FIFO used to enqueue pilot and copilot requests Real-time constraints: Periodic task: T period Aperiodic task: max activation Task Period LocC1 200ms LocC2 1.6s Task LocA1 LocA2 Max activation 2 / 200ms 5 / 5s LocC3 5s LocA3 5 / 1s Memory footprint: LocC4 1s Task Code size (Bytes) Data size Output size LocC LocC LocC LocC Task Code size (Bytes) Data size Output size LocA LocA LocA Texas Instruments TMS320C TMS320C66x DSP processors clocked at 1 GHz VLIW instruction set architecture 32 KB program memory (L1P) 32 KB data memory (L1D) 512 KB level 2 memory (L2) Several platform configurations L1P, L1D, and L2 memories can be configured as cache, SRAM, or a mix of both two different addresses: global address (accessible by all cores) or local address. E.g.: core 3. Local address = Timing issues 0x or global address = 0x local time-stamp counter cores start independently => unpredictable offsets Debugger may interrupt the core (e.g. printf) 72
37 Platform configuration Rule 1: static platform memory configuration L1D & L1P: cache L2: 100% SRAM.stack,.text,.data,.heap L2 SRAM DDR: MPB (Message Passing Buffer) : communication zone blackboard, mailbox MPB Statically mapped Navigation data-base DDR core L1D L1I MPB L2 SRAM Pros: Cons: Spatial partitioning: cores run in isolation, except when accessing the MPB or the DDR Task must fit in the L2 Feb. 5th ERTS Scheduling strategy Rule 2: static dispatcher on each core Partitioned non preemptive schedules Static schedule H0=1600 locc1 locc2 loca1 loca locc1 loca1 core 0 H1=5000 locc4 locc3 loca3loca4 loca3 200 core 1 Pros: Temporal partitioning: tasks run in isolation, except when accessing the MPB or the DDR Cons: Not flexible Feb. 5th ERTS
38 Super-block decomposition: AER model Rule 3: super-block decomposition Acquisition Execution - Restitution (AER) execution model 3 phases: acquisition (copy input data locally), execution (local execution), and restitution (copy output data from local to distant memory) Pros: Execution in isolation: no concurrency when accessing MPB and DDR Cons: Specific programming rules Complexity for finding a valid dispatch Feb. 5th ERTS Partie I - Introduction générale aux systèmes temps réel 1. Système temps réel 2. Architecture des systèmes temps réel 3. Calcul du WCET 1. Méthode d analyse statique 2. Implantation prédictible sur multi-cœurs 3. Et la suite? 4. Problématiques de conception des systèmes temps réel 5. Un peu de POSIX 76


39 Many-core 77 Arrivée des many-core Intel SCC (Single-chip Cloud Computer) 24 dual-core tiles répartis en grille coeurs, dérivés anciennes familles Pentiums Chaque tile contient un router et 16 KB pour passage de message (MPB) Cœurs ne dérivent pas mais démarrent avec offset TILEmpower-Gx36 36 tiles répartis en grille 6 6 Cœurs ne dérivent pas mais démarrent avec offset Cohérence de mémoire partagée avec politique homing 78

40 Arrivée des many-core Kalray MPPA 256 cœurs 79 Plan 1. Systèmes temps réel 2. Architecture des systèmes temps réel 3. Problématiques de conception de systèmes temps réel 4. Un peu de POSIX 80
41 Caractéristiques Programme «standard»: 1. (1) termine; (2) retourne un résultat et (3) manipule des données complexes mais sa structure de contrôle est assez simple. 2. Pour ces programmes standards, les propriétés à prouver sont toujours du style quand la fonction est appeléeet que la précondition est vérifiée, alors la fonction termine et la postcondition est vérifiée. Exemple typique de programme standard : compilateur, algorithme de tri. Programmes réactifs temps réel. 1. (1) ils ne terminent pas forcément; (2) ils ne calculent pas un résultat mais plutôt maintiennent une interaction ; (3) les types de données manipulés sont souvent simples alors que le contrôle est complexe (exécution de plusieurs composants en parallèle). Enfin bien souvent ils interagissent avec un environnement par le biais de capteurs (prise d information) et d actionneurs (action). [Bar08] 81 Propriétés temporelles Les propriétés que l on veut prouver sur ces systèmes réactifs sont très différentes de celles que l on veut prouver sur des programmes standards. On veut typiquement prouver des propriétés sur l entrelacement des événements tout au long de l exécution (infinie) du programme, par exemple -si un processus demande infiniment souvent à être exécuté, alors l OS finira par l exécuter; - il est toujours possible lors de l exécution de revenir à l état initial; - chaque fois qu une panne est détectée, une alarme est émise; - chaque fois qu une alarme a été émise, une panne avait été détectée. Schématiquement, pour les programmes standards, les propriétés à vérifier impliquent des prédicats très riches sur les données manipulées (ex. le tableau doit être trié) mais les aspects temporel sont très restreints, tandis que pour les systèmes réactifs l aspect temporel est très élaboré mais les prédicats sur les données sont souvent basiques (ex. x!=0). [Bar08] 82
42 Quels sont les choix pour le concepteur? 1. Architecture matérielle: au niveau système et composant. L architecture du système doit prendre en compte tous les types de contrainte, y compris des contraintes de distance physique ou de poids. Le composant faisant partie du tout doit se charger de ses entrées / sorties, de son interface et des moyens d intreconnexion. 2. Modèle de communication: modèle interne de communication entre processus d un composant et modèle de communication entre composants. Plusieurs solutions: envoi de messages, rendez-vous, Choix du support physique: time triggered (1553, Arinc429, TTP ), temps réel (CAN, AFDX ), classique (Ethernet, Wifi ) 3. Technologie des calculateur: PC, terminal, processeur, SOC, 4. Operating system et ordnnancement: operating system temps réel (VxWorks, PikeOS, Arinc 653, ), micro kernel, pas OS 5. Formalismes et langages d aide au développement: programmation à la main (C, Ada, ), langages semi formel de haut niveau (AADL, UML ), langages et formalismes formels de haut niveau (SCADE, Lustre, SDL, automates temporisés ) 83 Quels sont les choix pour le concepteur? 1. Architecture matérielle: au niveau système et composant. L architecture du système doit prendre en compte tous les types de contrainte, y compris des contraintes de distance physique ou de poids. Le composant faisant partie du tout doit se charger de ses entrées / sorties, de son interface et des moyens d intreconnexion. 2. Modèle de communication: modèle interne de communication entre processus d un composant et modèle de communication entre composants. Plusieurs solutions: envoi de messages, rendez-vous, Choix du support physique: time triggered (1553, Arinc429, TTP ), temps réel (CAN, AFDX ), classique (Ethernet, Wifi ) 3. Technologie des calculateur: PC, terminal, processeur, SOC, 4. Operating system et ordnnancement: operating system temps réel (VxWorks, PikeOS, Arinc 653, ), micro kernel, pas OS 5. Formalismes et langages d aide au développement:programmation à la main (C, Ada, ), langages semi formel de haut niveau (AADL, UML ), langages et formalismes formels de haut niveau (SCADE, Lustre, SDL, automates temporisés ) 84
43 Plan 1. Systèmes temps réel 2. Architecture des systèmes temps réel 3. Problématiques de conception de systèmes temps réel 4. Un peu de POSIX 85 Standard POSIX POSIX Portable Operating System Interface [for Unix] name of a family of related standards specified by the IEEE to define the application programming interface (API), along with shell and utilities interfaces for software compatible with variants of the Unix operating system, although the standard can apply to any operating system Advantages: COTS often implement some POSIX functionalities portability: a compliant POSIX application should be ported on several systems RTOS compliant with POSIX: VxWorks (partially) QNX RTEMS (Real-Time Executive for Multiprocessor Systems), free open source real-time operating system designed for embedded systems. RTAI RTLinux (partially) Marte OS (subset) 86
44 Process and task in POSIX Hierarchy of processes and tasks - Process = entity with its own memory - Thread = internal entity of a process. The threads of a process share the memory Executive process process process thread process thread thread thread 87 Brief overview of POSIX POSIX.1 Core Services IEEE Std POSIX.1b Real-time extensions IEEE Std b Process Creation and Control, Signals, Timers... Priority Scheduling, Real- Time Signals, Clocks and Timers, Semaphores, Message Passing Define API with the RTOS Define the extensions for real-time POSIX.1c Threads extensions IEEE Std c Thread Creation, Control, and Cleanup; Thread Scheduling Define the API for the threads management 88
45 Functions on thread boussens.cert.fr 46 ==: man -k pthread pthread.h [] (0p) - threads pthread_atfork [] (3p) - register fork handlers pthread_attr_destroy [] (3) - initialize and destroy thread attributes object pthread_attr_destroy [] (3p) - destroy and initialize the thread attributes object pthread_attr_getaffinity_np [] (3) - set/get CPU affinity attribute in thread attributes object pthread_attr_getdetachstate [] (3) - set/get detach state attribute in thread attributes object pthread_attr_getdetachstate [] (3p) - get and set the detachstate attribute pthread_attr_getguardsize [] (3) - set/get guard size attribute in thread attributes object pthread_attr_getguardsize [] (3p) - get and set the thread guardsize attribute pthread_attr_getinheritsched [] (3) - set/get inherit scheduler attribute in thread attributes object pthread_attr_getinheritsched [] (3p) - get and set the inheritsched attribute (REALTIME THREADS) pthread_attr_getschedparam [] (3) - set/get scheduling parameter attributes in thread attributes object 89 Example: man pthread_create pthread_create - create a new thread #include <pthread.h> synopsis: int pthread_create(pthread_t * thread, pthread_attr_t * attr, void * (*start_routine)(void *), void * arg); pthread_create() creates a real-time thread that will have attributes given by attr, and that begins executing function start_routine(arg). If the attribute is NULL, default attributes are used. See pthread_attr_init for a complete list of attributes. Upon successful completion, pthread_create()shall store the ID of the created thread in the location referenced by thread. If the start_routine returns, the effect shall be as if there was an implicit call to pthread_exit() using the return value of start_routine as the exit status. If successful, the pthread_create() function shall return zero; otherwise, an error number shall be returned to indicate the error. 90
46 Bibliographie 1. Frédéric Boniol: cours sur les systèmes temps réem 2. Pierre-Emmanuel Hladik: cours sur les systèmes temps réel 3. Jean-Pierre Elloy: cours sur les systèmes temps réel 4. Gilles Geeraerts: Introduction aux systèmes embarqués 5. Wikipedia 6. Pascal Brisset. Paparazzi Stéphane Bardin. Introduction au Model Checking, Plan 1. Partie I - Introduction générale aux systèmes temps réel et aux problématiques de conception 2. Partie II - SDL 3. Partie III Langage Lustre: syntaxe, sémantique et preuve 4. Partie IV Introduction aux automates temporisés 92
47 Organisation du cours 1. Présentation de Lustre 1. Syntaxe 2. Sur-échantillonnage et sous-échantillonnage 2. Quelques points sémantiques 93 Approche Flot de données (data-flow): X est une suite infinie de valeurs X n avec n 0 X n est la n-ième valeur de X Définition de flot: Un flot est défini par une équation graphique O=F(X,Y,..) qui permet de calculer O n en fonction de X n et Y n (à chaque instant) Un programme SCADE: Ensemble d équations Description modulaire A chaque instant, les valeurs des flots sont calculées en fonctions des valeurs des flots d entrée 94
48 Syntaxe générale [declaration of types and external functions] node name (declaration of input flows) returns (declaration of output flows) [var declaration of local flows] let [assertions] system of equations defining once each local flow and output depending on them and the inputs tel. [other nodes] Types : basic types: int, bool, real tabular : int^3, real^5^2 95 Operators Classical operators: Arithmetical : Binary : +, -, *, div, mod, /, ** Unary : - Logical : Binary : or, xor, and, => Unary : not Comparison : =, <>, <, >, <=, >= Control : if. then. else Temporal operators : pre(precedent) : operator which allows to work on the past of a flow ->(followed by) : operator which allows to initiate a flow 96
 Flot pre(x)=(nil, X 0, X 1,, X n, ) Exemple : détection de")
 ; 97 Operator -> - rappel Initialise un flot")
 -> if (T>100) then true else")
49 Opérateur pre - rappel Mémorise les valeurs précédentes du flot Flot X = (X 0, X 1,, X n, ) Flot pre(x)=(nil, X 0, X 1,, X n, ) Exemple : détection de dépassement de seuil Distance = if (X>pre(X)) then X-pre(X) else pre(x)-x ; Over = (Distance > Threshold) ; 97 Operator -> - rappel Initialise un flot Flots X= (X 0, X 1,, X n, ) et Y=(Y 0, Y 1,, Y n, ) Y->X= (Y 0, X 1,, X n, ) Exemple : surveillance température A = (T>100) -> if (T>100) then true else pre(a) ; 98
50 Exemples standards - rappel A resetable counter Input: reset reset the counter (Boolean flow) Output: counter value of the counter (Integer flow) Write the program node a_counter (reset : bool) returns (counter : int) let tel counter = 0-> if reset then 0 else pre counter +1; counter = if reset then 0 else (0-> pre counter +1); 99 Exercise A timer: Input: set activation of the timer (Boolean flow) Output: level state of the timer (Boolean flow) Constante: delay duration of the timer in number of tops Write the program const delay : int; node timer (set : bool) returns (level : bool) var c : int; let tel c = if set then 0 else (N+1-> pre c +1): level = (c=n); 100
51 Organisation du cours 1. Présentation de Lustre 1. Syntaxe 2. Sur-échantillonnage et sous-échantillonnage 2. Quelques points sémantiques 101 Clock-based semantics Clock: a clock is a Boolean flow Basic clock: is the flow true Semantics of a flow: is the sequence of pairs (v i,c i ) where v i is the value and c i is the clock associated to the flow Equation: must be homogenous in term of clock X + Y has a sense iff X and Y have the same clock 102
52 Operator when Sub-samples a flow on a lower clock Let X be a flow and B a Boolean flow (assimilated to a clock) of same clock. The equation Y = X when B defines a flow Y, of same type than X, and of clock B Y is present when B is true Y is absent when B is false or when B and X are absent 103 Operator current Over-samples a flow on a quicker clock Let X be a flow and B a Boolean flow (assimilated to a clock) of same clock. The equation Y = X current B defines a flow Y, of same type than X, and of clock the clock ofb Y is present iff B is present when Y is present, Y is equal to X if X is present and to the previous value of X otherwise 104
53 Sampling The operator when defines a slower flow than the input X C true false false true true false true X when C Question: is the flow X + X when Cwell defined? The operator current constructs a faster flow than the input X C true false false true true false true Y=X when C current (Y) Warning: current (X when C) X 105 Problem of initialisation of current X C false false false true true false true current(x when C) nil nil nil Idea 1 : sample with clocks which are initially true C1 = true -> C true false falsetrue true false true current(x when C1) Idea 2: force a default value E = if C then current(x when C) else (dft -> pre E); Idea 3: (to avoir additionnal memory) X1 = (if C then X else dft) -> X; E = current(x1 when C1); 106
54 Exercise For the following counters: node counter (reset : bool) returns (n : int) let n = O -> if reset then 0 else pre n + 1; tel node decounter (reset : bool) returns (n : int) let n = O -> if reset then 0 else pre n - 1; tel node counter2 (reset,c : bool) returns (n : int) let n = if c then counter(reset) else decounter(reset); tel Precise the behaviour of the node node counter3 (reset,c : bool) returns (n : int) var c1,c2 : int; let c1 = current (counter(reset when c)); c2 = current (counter2 (reset when not c), (c when not c)); n = if c then c1 else c2; tel 107 Recapitulative B false true false true false false true true X x0 x1 x2 x3 x4 x5 x6 x7 Y y0 y1 y2 y3 y4 y5 y6 y7 pre(x) nil x0 x1 x2 x3 x4 x5 x6 Y->pre(X) y0 x0 x1 x2 x3 x4 x5 x6 Z=X whenb x1 x3 x6 x7 T=current Z nil x1 x1 x3 x3 x3 x6 x7 pre(z) nil x1 x3 x6 0->pre(Z) 0 x1 x3 x6 108
55 Exercice Ecrire le comportement du programme node exo(x: int; C,D : bool;) returns(y : bool) var Z : int when C; let Z = current ((X when C) when D); Y= current(z); tel 109 Exercice: Additionneur 3 bits Les booléens sont interprétés comme des chiffres binaires: faux = 0, vrai = 1 Ecrire un nœud (combinatoire) node Add3b(cin, x, y : bool) returns (cout, s : bool); qui réalise l addition binaire de cin, x et y i.e., pour tout t cin t + x t + y t = 2 * cout t + s t 110
56 Exercice: Additionneur série Les flots de booléens sont interprétés (quand c est possible) comme des nombres binaires arbitrairement long : X = X 0 + X 1 * 2 + X 2 * X t * 2 t Quel est l entier représenté par le flot false? 2. Quel est l entier représenté par le flot true -> false? 3. Ecrire un additionneur série: 1. node AddSerie(X, Y : bool) returns (S : bool); 2. tel que le flot S représente la somme des nombres binaire X et Y. 4. Que vaut le flot AddSerie(true->false, true->false)? 5. Comment peut-on interpréter le flot true? 111 Organisation du cours 1. Présentation de Lustre 1. Syntaxe 2. Sur-échantillonnage et sous-échantillonnage 2. Quelques points sémantiques 1. Sémantique 2. Compilation 3. Traduction automates Scade 112
57 Sémantique de traces Notations: X est un flot x est une valeur de flot et nil est l absence de valeur Constantes: 0 = 0.0 Opérateurs usuels: nil.x op nil.y= nil.x op Y x.x op y.y= (x op y).x op Y Valeur initiale: nil.x -> nil.y = nil. X -> Y x.x -> y.y= x.y 113 Sémantique de traces Retard: pre nil.x= nil.pre X pre x.x= nil.pre# x X pre# x x.x= x.pre# x X pre# x nil.x = nil.pre# x X Sous-échantillonnage: nil.x when nil.c= nil.x when C x.x when vrai.c= x.x when C x.x when false.c = nil.x when C 114
58 Sémantique de traces Sur-échantillonnage: current nil.x nil.c = nil. current X C current nil.x false.c= nil. current X C current x.xtrue.c = x. current # x X C current # x x.x vrai.c =x.current # x X C current # x nil.x faux.c= x.current # x X C current # x nil.x nil.c= nil.current # x X C Exercice Donner la sémantique de x<>y if C then x else y 115 Sémantique de traces Un nœud est une fonction qui associe aux sorties la solution du système d équations appliqué aux entrées. Les équations d un nœud Lustre forment une fonction f : D D D D D tel que (s,v) = f(e,s,v) où s sont les sorties, e les entrées et v les variables intermédiaires. Le nœud complet réalise la fonction (solution de l équation X=F(X)) ea µ s, vf( e, s, v) où est µ s,v le plus petit point fixe de f par rapport à ses composantes s et v. 116
59 Sémantique de traces Une manière effective de calculer ce point fixe est µ s,v f(e,s,v)= sup n {f n (e, ε,ε)} Ainsi la solution consiste à calculer de manière itérative f(ε, ε,ε) f(e 0,f(ε, ε,ε)) f(e 0.e 1,f(e 0,f(ε, ε,ε))) Cela revient au principe d exécution: initialisations tant que vrai lire les entrées calculer les sorties mettre à jour les mémoires fin tant que 117 Les horloges L horloge de base est vrai,vrai,vrai,vrai =vrai ω Les constantes sont sur l horloge de base 2 (2,vrai),(2,vrai), (2,vrai), (2,vrai), Les entrées provenant de l environnement sont sur l horloge de base L horloge de Z = X op Y est h Z = h X = h Y X = 2 + Y alors h X = h 2 = h Y (= vrai ω si Y est une entrée) L horloge de Z = X -> Y est h Z = h X = h Y L horloge de Z = pre X est h Z coïncide avec h X après la 2ème valeur et vaut nil avant X = pre 2 alors h X = faux.vrai ω L horloge de Z = X when C est h Z = h X on C X = 2 when C alors h X = C si h c = vrai L horloge de Z = current (X when C) est h Z = h X = h C 118
60 Hiérarchie d horloges L'imbrication des when forme un arbre d'horloges dont la racine est l'horloge de base du nœud. L'horloge de base d'un nœud est l'horloge de la plus rapide de ses entrées. Tandis que le when crée une nouvelle horloge (horloge fille) dans l'arbre d'horloges, le current permet de remonter d'un niveau et un seul dans l'arbre (horloge mère). vrai.c1 on vrai.c2 = vrai.(c1 on C2) vrai.c1 on false.c2 = false.(c1 on C2) nil.c1 on nil.c2 = nil.(c1 on C2) 119 Organisation du cours 1. Présentation de Lustre 1. Syntaxe 2. Sur-échantillonnage et sous-échantillonnage 2. Quelques points sémantiques 1. Sémantique 2. Compilation 3. Traduction automates Scade 120
61 Analyses statiques Vérifier la correction du programme avant de générer du code. Analyse de causalité: Vérifie l absence de cycle dans les définitions de flots. Analyse d initialisation Vérifie que l on n accède pas à des valeurs non initialisées (pre). Calcul d horloges Vérifie que l on ne combine que des flots d horloges identiques. 121 Analyse de causalité De nombreux langages de type schéma/bloc (ex, Scade, Simulink) imposent une condition de non rebouclage direct, i.e., tous les cycles doivent traverser un retard (registre). Vérifie l absence de cycle dans les définitions de flots (s apparente à la recherche de cycle dans un graphe). 122
62 Calcul d horloge Le calcul d horloge associe à chaque flot son (unique) horloge et vérifie la correction des horloges. X + (X when C) sera rejeté par le calcul d horloge vérifie que l on ne combine que des flots d horloges identiques (pas d accès à des valeurs de flot absentes). équivalence des horloges purement syntaxique C = true -> not pre C; C1 = true -> not pre C1; Y = X when C et Y1 = X when C1 ne sont pas vus comme ayant la même horloge 123 Approche par inférence d horloge Idée : reprendre les techniques d inférence de types (classique en ML) Calcul d horloge = système de types. Système de types = ensemble de règles d inférence. 124
63 Règles d inférence c Dom( E) EKc: E( c) E est un environnement associant un type (ou une horloge) à une expression. E x : t est un jugement de type déclarant que x a le type t dans l environnement E. Une règle d inférence dit que si les prémisses de la règle (partie haute) sont satisfaites alors on peut en déduire que la conclusion (partie basse) est vraie. Ci-dessus on déclare qu une constante c a pour type E(c) si elle fait partie du domaine de E. On dit ainsi que c est bien typée si elle est liée (déclarée) dans E. 125 Type fonctionnel + : int int int désigne un type fonctionnel. On déclare que + est une fonction, qui s applique à deux entiers et renvoie un entier. On déclare aussi que l application de + à un seul entier produit une nouvelle fonction, qui s applique cette fois à un seul entier (ex : (3+)4). 126
64 Type polymorphe id : α, α α On déclare que la fonction identité prend un paramètre de type α et renvoie une valeur de type α. Et ce, quel que soit α. Ainsi identité s applique aussi bien à des entiers, qu à des chaînes de caractères et même à des valeurs fonctionnelles. Par contre on renvoie à chaque fois une valeur du même type que le type du paramètre. 127 Règle d inférence d horloge du + E + : α, α α α L addition prend deux flots de même horloge. Cette horloge est quelconque. Si les flots ne sont pas de même horloge, ils sont mal synchronisés, la règle ne peut être appliquée. 128
65 Règle d inférence d horloge fonctionnelle E, x: cl1 e: cl2 E λxe. : cl cl λx.e est une fonction qui associe la valeur e au paramètre x (ex : λx.x + 3). Pour calculer l horloge de cette expression, on rajoute x dans l environnement avec son horloge. Intuitivement, cela revient à déclarer les paramètres de la fonction dans l environnement. Dans cet environnement enrichi, on calcule ensuite l horloge de e. L horloge obtenue pour e est l horloge de retour de la fonction. L expression résultante a une horloge de type fonctionnel Règle d inférence d horloge fonctionnelle E f : cl1 cl2 E ex : cl E f x: cl 2 1 f x est l application de la fonction f à x. Pour que f x soit bien synchronisé, il faut que : f soit une fonction (prémisse gauche). x ait l horloge du paramètre attendu par f (prémisse droite). f x a alors pour horloge l horloge de la valeur retournée par f. Exemple d application : (λx.x + 3) 5, résultat
66 Règle d inférence when when: α, X, α ( X : α) α on X Le premier paramètre de when est sur une horloge quelconque α. Le second est une condition, représentée par X, ayant elle aussi pour horloge α. Le résultat (x when c) est sur une nouvelle horloge, l horloge α restreinte aux instants où la condition X est vraie. L horloge α peut elle-même être de la forme β on y. Exercice: écrire la règle pour le current 131 Preuve L ensemble des règles forme un système de preuves. On utilise ce système pour prouver qu une expression complexe est bien synchronisée. On calcule en même temps son horloge. Si une expression n admet pas de preuve dans le système de type, alors elle est mal synchronisée, rejetée par le compilateur. 132
67 Exemple Programme à inférer node N (c: bool, a: int when c, b: int) returns (o: int when c) let o =(a + 2) (b when c); tel 133 Exemple node prog1 (B1, B2:bool; H1:bool when B1; H2:bool when B2; X1:int when H1; X2:int when H2; Y:int when (B1 and B2)) returns (S : int when ) var Z1:int when ; Z2:int when ; Z3:int when ;Z4:int when ; let Z1 = current(x1); Z2 = current(x2); Z3 = current(z1) + current(z2); Z4 =(current(z3) when (B1 and B2)) + Y; S = current(z4); tel 134
68 Structure d un programme réactif Structure Système ( E, S ) mémoire M M: =M0 à chaque période faire lire(e) S= f (M, E) M=g (M, E ) écrire (S) Le compilateur doit : Identifier la mémoire M à allouer. Calculer les valeurs initiales de M0. Fournir le code du corps de la boucle effectué à chaque période. En essayant d optimiser le tout. 135 Compilation en boucle simple Un nœud Lustre une fonction C Séquentialiser la description P int A, X, Y, S; void F_step () { } A F X + S void G_step (){ } void P_step (){ F_step(); G Y G_step(); S = X+Y; } 136
69 Principes de la compilation en boucle simple Code Lustre Définition de flot Opérateur point à point (+, and) Code C Affectation Opérateur standard > Mémoire initiale pre Valeur mémorisée when if 137 Exemples node ajout (i,j :int) int i,j,o; returns (o: int) void ajout_step (){ let o=i+j; o = i+j; } tel node ajout_1 (i,j :int; c : bool) int i,j,o; returns (o: int when c) bool c; let void ajout_1_step() { o = (i+j) when c; if ( c ) o=i+j; tel } 138
70 Exemples node retard (x: int) int x,y; // entrées sorties returns (y : int) int px; // mémoires non initialisées let bool init = true; // initialisation y = 0 -> pre X void retard_step() { tel if (init) { y=0; init = false; } else { y=px; } px = x; } 139 Exercice Donner le code généré pour le programme Lustre suivant: node timer (set : bool) returns (level : bool) var count : int; let count = if set then 3 else 0-> (if pre level then pre count -1 else pre count); level = (count > 0) tel 140
71 Compilation en automates Solution Lustre plus puissant, mais compilation plus complexe, code moins lisible. node EDGE (X : bool) returns (Y : bool) let Y = X (X and not pre(x)); tel ; x/y not x/not y 1 2 x/not y not x/not y Etat <==> une configuration de la mémoire 1 correspond à px = false 2 correspond à px = true 141 Construction automate réactif Compteur avec remise à zéro à retard node CptF (X, reset : bool) returns (cpt : int) var F, R : bool; let cpt = if R then 0 else if F then pre cpt +1 else pre cpt; F = X (X and not pre(x)); R = true -> pre reset; tel Etats de l automate: (il y a 3 mémoires) 1. init = true, px = false, preset=false; 2. not init, px, preset 3. not init, px, not preset 4. not init, not px, preset 5. not init, not px, not preset 142
72 Construction automate réactif X,reset X, not reset 1 not X, not reset not X,reset Et ainsi de suite on calcule les transitions pour les autres états On minimise l automate afin d optimiser 143 Implantation en C typdef enum {S1, S2, S3, S4, S5} Tstate; Tstate state = S1; void CptF_step() { switch (state) { } case S1 S2 S4: cpt = 0; break; case S3: break; case S5: if X cpt++; break; if (reset && state == S1) state = S2; } 144
73 Exercice Traiter les nœuds ajout, retard et timer. 145 Conclusion Automate Compilation plus rapide Code potentiellement énorme Utile pour la validation Boucle simple Moins rapide Taille du code linéaire (solution choisie par les industriels) 146
74 Organisation du cours 1. Présentation de Lustre 1. Syntaxe 2. Sur-échantillonnage et sous-échantillonnage 2. Quelques points sémantiques 1. Sémantique 2. Compilation 3. Traduction automates Scade 147 Références 1. Alain Girault: cours sur Lustre 2. Pascal Raymond: cours sur Lustre 3. Julien Forget: cours sur les systèmes temps réel 4. Nicolas Halbwachs, Pascal Raymond: A tutorial of Lustre 5. Nicolas Halbwachs. Synchronous programming of reactive systems. Kluwer Academic Pub., Thomas Bochot, Vérification par model-checking des commandes de vol: applicabilité industrielle et analyse de contre-exemples. Thèse, Christophe Ratel, Définition et réalisation d'un outil de vérification formelle de programmes LUSTRE. Thèse
75 References 1. Frédéric Boniol: course on Lustre 2. Alain Girault: course on Lustre 3. Pascal Raymond: course on Lustre Julien Forget: course on real-time systems 5. Nicolas Halbwachs, Paul Caspi, Pascal Raymond, Daniel Pilaud: The synchronous dataflow programming language Lustre (1991) 6. Nicolas Halbwachs. Synchronous programming of reactive systems. Kluwer Academic Pub., Jérôme Ermont. TP on the Lego robot. 8. Esterel technology: SCADE Update, présentation aérospace vallée, [Est10] 149 Plan 1. Partie I - Introduction générale aux systèmes temps réel et aux problématiques de conception 2. Partie II Langage Lustre: syntaxe, sémantique et preuve 3. Partie III - SDL 4. Partie IV Introduction aux automates temporisés 150
76 Plan 1. Où peut on utiliser un langage de haut niveau? 2. Introduction à SDL 3. Syntaxe de SDL 4. Sémantique de SDL 151 Processus de développement Spécification, définition Conception, Architecture globale Conception détaillée, Programmation de haut niveau Programmation bas niveau Implantation 152
77 Processus de développement Spécification, définition UML-RT => Use cases sequence diagram SDL Conception, Architecture globale Conception détaillée, Programmation de haut niveau Programmation bas niveau Implantation 153 Processus de développement Spécification, définition Conception, Architecture globale Conception détaillée, Programmation de haut niveau UML-RT SDL => System structure (class diagram) => Description of tasks, processes => Description of components Schedulability analysis Formal verification of the global behaviour (timed model checking ) Programmation bas niveau Implantation 154
78 Processus de développement Spécification, définition Conception, Architecture globale Conception détaillée, Programmation de haut niveau SDL ESTEREL SCADE/LUSTRE => Task description Formal verification of the behaviour of each task Programmation bas niveau Implantation 155 Processus de développement Spécification, définition Conception, Architecture globale Conception détaillée, Programmation de haut niveau Programmation bas niveau C, C++ Ada task coding Computation of wcet of each task Implantation 156
79 Processus de développement Spécification, définition Conception, Architecture globale Conception détaillée, Programmation de haut niveau Programmation bas niveau Implantation Simple sched (RMA, EDF ) Simple sched under energy constraint Real-time sched (m,k)-firm => choice of scheduling => choice of real-time OS => choice of network and of protocols Evaluation of performances 157 Plan 1. Où peut on utiliser un langage de haut niveau? 2. Introduction à SDL 3. Syntaxe et sémantique de SDL 158
80 Introduction SDL (Specification and Description Language): Défini en 1976 par le CCITT, Comité consultatif internationale télégraphique et téléphonique maintenant ITU-T International Telecommunication Union recommandation Z.100 Z.109 Initialement prévu pour la spécification et le développement de protocoles Bien adapté à la description formelle de systèmes réactifs, notamment des systèmes embarqués temps réel distribués Langage vivant (mises à jour régulières) Principales caractéristiques: la spécification du système est la description du comportement attendu la description du système représente le comportement réel les spécifications et les descriptions en SDL sont formelles dans le sens où elles peuvent être analysées et interprétées sans ambiguïté (basé sur automates finis communicants étendus avec des types de données abstraits) SDL est facile à apprendre et utiliser => langage textuel ou graphique plusieurs méthodes formelles peuvent être appliquées (model checking, génération de scénario de tests) 159 Bref historique 1968 premières études 1976 Orange book SDL langage graphique élémentaire 1980 Yellow book SDL définition de la sémantique des processus 1984 Red book SDL types de données, premiers outils 1988 Blue book SDL concurrence, compositions, outils effectifs => SDL-88: langage simple mais sémantique formelle 1992 White book SDL approche objet => SDL-92 langage plus complexe 1996 SDL-96 corrections et ajouts mineurs 2000 Intégration avec UML => SDL
81 Avantages Spécification: description du comportement attendu Description: description du comportement réel Possibilité de simuler/exécuter le système partiellement décrit Compilateur vérifie la cohérence de l architecture Sémantique formelle: pas d'ambiguïté entre le client et le fournisseur Mieux que diagramme de séquence: diagrammes sont incomplets et ne décrivent pas les comportements interdits Interface avec UML Tests: génération de test automatique et validation Implantation: génération de code automatique Indépendance avec l API Génération de code à partir d un automate peut facilement être fausse Langage unique tout le long du cycle de développement A l ENSEEIHT: RTDS par Pragma-dev 161 Exemple industriel: ATC (Air Traffic Control) La France est décomposée en 5 zones chacune contrôlée par un centre ATC. Chaque centre guide les avions, désencombre l espace aérien et sécurise les trajectoires. Le but est - de prévenir les collisions entre les aéronefs et le sol ou les véhicules d'une part, et les collisions en vol entre aéronefs d'autre part (autrefois appelés «abordages»); - de fournir les avis et renseignements utiles à l'exécution sûre et efficace du vol : informations météorologiques, information sur l'état des moyens au sol de navigation, information sur le trafic (quand le service de contrôle n'est pas assuré dans cette zone) ; - de fournir un service d'alerte pour prévenir les organismes appropriés lorsque les aéronefs ont besoin de l'aide des organismes de secours et de sauvetage, et de prêter à ces organismes le concours nécessaire. [wikipedia] 162
82 ATC embarqué: la liaison de donnée Les données des calculateurs de bord (position, altitude, vitesse, météo) sont collectées, puis transmises à intervalles réguliers par satellite vers les équipements au sol. Messagerie électronique pour les dialogues entre pilotes et contrôleurs. ADS (Automatic Dependant Surveillance) : Surveillance automatique de la position réelle de l'avion. Si l'avion dévie de son profil de vol autorisé, il passe dans un mode de surveillance plus serré qui permet de corriger sa position rapidement. Future génération: ADS-B (Broadcast : diffusion), les délais d envoi sont améliorés. CPDLC (Controller-Pilot Data Link Communications) :communication entre les pilotes et les contrôleurs par un système de messagerie électronique. Ces dialogues sont codifiés pour des raisons de sécurité (pas d ambiguïté) : messages préformatés avec passage de paramètres (ex : autorisation de monter ou de descendre à tel ou tel niveau de vol), avec des procédures de bouclage pour s'assurer que l'information a bien été envoyée, reçue et suivie. «surveillance enrichie» ou CAP (Controller Access Parameters). Les systèmes bord enverront automatiquement des informations de surveillance précises telles que : le cap magnétique, le taux de montée, la vitesse indiquée Ces informations devenant disponibles pour les contrôleurs aériens, la surveillance des vols devient plus fine et la charge de communication réduite entre pilotes et contrôleurs. [wikipedia] 163 ATC embarqué Application bord: les sous fonctions sont exécutées dans une partition dans un module IMA. Les sous fonctions sont codées par des processus SDL lignes de code C générées à partir de SDL lignes de code C manuelles 164
83 Plan 1. Où peut on utiliser un langage de haut niveau? 2. Introduction à SDL 3. Syntaxe et sémantique de SDL 165 Structure of an SDL system An SDL system is a structured set of processes which execute in parallel and communicate by exchanging messages An SDL system is a real-time system immersed in its environment through an interface environment interface system 166
84 Structure of an SDL system SDL provides structuring principles which consist in decomposing a system in components that can be developed independently and in no specific order. 3 levels of structuring: 1. System = block + communication channel 2. Block = processes + signal route 3. Process = an automaton block environment interface system block block 167 Structure of an SDL system A block can be decomposed into blocks, but a block leaf is necessary a process or a set of processes channel block channel process process channel 168
85 Example: simple reactive system system reactive_system Signal order, result; input [ order ] reactive_block_1 output [ result ] 169 Example: simple reactive system Block reactive_block_1 input input1 [ order ] reactive_process_1 output1 [ result ] output 170
86 Example: simple reactive system process reactive_process_1 wait order result wait 171 MSC (Message Sequence Chart) Les simulateurs de SDL génèrent des MSC. Cela décrit une succession possible des signaux et des mises à jour de variables. Il faut décrire l ensemble des processus et l environnement. FTP_client FTP_serveur Command Data MSC du client/serveur 172
87 Lexical rules Comments: between/* */ after keywords COMMENT special graphical symbol for the graphical version a comment Identifier: [a-z_+#@]* Channels and signal route are typed No shared variable Components are visible by the parents 173 Declarations Declarations are made in block text: At system level, declaration of signal SIGNAL <ident> (, <ident>)* A signal is a type, a signal occurrence is a typed message Signal Command, data; Elementary types: Boolean: true, false Character: A, 1, Integer: Z Natural: N Real Charstring Pid: identifier of process (2 operators =, /=) Time 174
88 Example 2 system FTP_minimal Signal Command, Data; FTP_server FTP_connection [ command ] [ data ] FTP_client block FTP_client block FTP_server process_client [ data ] link [ command ] FTP_connection FTP_connection [ data ] [ command ] link process_server Verification of the coherence of the exchanges 175 Definition of the behaviour in the process A process is a finite machine state where the transition depend on the reception of some signal. Symbol of a state: idle (initial state ) Symbol of reception: data Symbol of emission: command 176
89 Example: process of the client process FTP_client receive command data receive receive 177 Example: process of the server process FTP_server idle idle command data 178
90 Sémantique d un processus Un processus SDL est un système de transition S=<Σ,s 0,T,Sig in,sig out,sv>: - Σ est un ensemble fini d états - s 0 Є Σ est l état initial - Sig in et Sig out sont les signaux d entrée et de sortie de S - T Σ Sig in Sig out Σ ensemble des transitions. Une transition est de la forme (s 1,a,σ,s 2 ) où s 1 est l état source, a est l événement enclenchant la transition, σ la séquence d événements produits par le processus lors du franchissement de la transition, s 2 l état d arrivée - Sv : Σ 2 Sig in est la fonction qui associe à chaque état les événements d entrée sauvegardés. 179 Exemple off sleep off sleep wait mode1 req S1 S1 dcapt data wait mode2 req S2 * off sleep sleep on wait S2 dcapt req S1 * Σ={init, wait, sleep, S1, S2} Sig in = {off, on, mode1, mode2, dcapt} Sig out = {req, data} T={ (wait,off,(),sleep); (wait,mode1,(req),s1); (wait,mode2,(req),s2); (sleep,on,(),wait); (S1,off,(),sleep); (S1,dcapt,(data),wait); (S2,off,(),sleep); (S2,dcapt,(req),sleep); Sv(wait)=Sv(sleep)=(); Sv(S1)=Sv(S2)={on,mode1,mode2}. 180
91 Communication semantics Communication between processes is asynchronous To each process, is associated a unique unbounded FIFO file P1 1 m P2 m 2 m m Communication semantics At the reception of a message: The message is removed from the file Progress of the process process P1 m p process P1 p s1 m input(m) s1 m s2 control point of the process s2 182
92 Communication semantics Unexpected messages are deleted. control point of the process r m p r m r process P1 process P1 process P1 s1 m input(m) s1 m input(m) s1 m s2 s2 s2 183 Signal handling The signal received by a process are stored in a FIFO. In a state, only a subset of signals are awaited. By default, any signal in the head of the FIFO which is not awaited is deleted. A back-up is possible by the use of the symbol Data 184
93 Variables declaration In a block text. DCL <ident> (,<ident>)* <type> (, <ident> (,<ident>)* <type> )* DCL a Character; DCL b Character, i integer; DCL c,d Character, n,m Natural ; 185 Declarations Signals can transport some values: Signal Data(Integer, Boolean); Signal Ack(Boolean); Example: SIGNAL s(integer); idle DCL val Integer; idle s(val) s(val+1) idle 186
94 Decision During a transition (reception of a signal), it is possible to make a decision depending on some expression. expr Examples ( test ) ( test ) ( else ) n n<5 ( n<5 ) ( else ) ( true ) ( false ) 187 Tasks After a transition, it is possible to make some computation step sending task n s ( n<5 ) ( else ) ok n := 0 n :=n+1 sending 188
95 Loops At any time after entering in a transition, it possible to put a loop sending n s l ( n<5 ) ( else ) ok n := 0 n :=n+1 sending l 189 Timers Variables of type TIMER. Such a variable has 3 states: inactive, active and expired. When declared, a timer is inactive. We set a timer by giving it a delay: SET (<delay>,<timer>) When the delay is overrun, the timer is expired. T reset reset set overrun inactive active expired set 190
96 Example: process of the client wait command set(now+10,t) wait data T command set(now+10,t) wait 191 Exercice Emetteur Medium Récepteur 1. L utilisateur envoie un signal à l émetteur qui le transmet au médium lequel est supposé le réémettre au récepteur. Le récepteur renvoie un acquittement dès réception d un message. Malheureusement le médium perd 1 paquet sur 3 et duplique un acquittement 1 sur L émetteur réémet sa donnée lorsqu il n a pas reçu d'acquittement au bout de 10 u.t. 192
97 Références 1. Marc Boyer: course sur SDL. 2. Ahmed Bouadballah: course sur SDL. 3. Jan Ellsberger, Dieter Hogrefe and Amardeo Sarma: SDL formal object-oriented language for communicating systems, Prentice hall, Laurent Doldi. SDL illustrated visually design executable models. Number ISBN Specification and description language (SDL). Recommandation Z.100, International Telecommunication union, Eric Bonnafous, Frédéric Boniol, Philippe Dhaussy et Xavier Dumas. Experience of an efficient and actual MDE process : design and verification of ATC onboard system, 2008, Conference on UML&FORMAL METHODS, Kitakyushu-city, Japan 7. Xavier Dumas. Application des méthodes par ordres partiels à la vérification formelle de systèmes asynchrones clos par un contexte: application à SDL. Thèse Plan 1. Partie I - Introduction générale aux systèmes temps réel et aux problématiques de conception 2. Partie II Langage Lustre: syntaxe, sémantique et preuve 3. Partie III - SDL 4. Partie IV Introduction aux automates temporisés 194
98 IV Introduction aux automates temporisés 1. Rappels sur les automates 2. Définition automates temporisés 3. Vérification de propriétés temporelles 195 Définition automate Un automate A est un 4-uplet (Q,E,s 0, ) avec: - Q est un ensemble fini d'états; - s 0 Є Q est l'état initial; - E est un alphabet fini d'actions; - \subseteq Q x E x Q est une relation de transition. Exercice Modéliser un interrupteur à l'aide d'un automate. Modéliser un distributeur automatique de billets (DAB) à l'aide d'un automate. Les spécifications sont les suivantes: si l'utilisateur se trompe de code 3 fois de suite, la carte est avalée, l'utilisateur ne peut sortir sa carte que s'il a réussi à entrer correctement son code, le distributeur ne propose pour unique opération que le retraitde billets: il rend d'abord la carte puis la somme demandée. 196



99 Rappels définitions 197 Exemple de synchronisation Reprenons le cas du distributeur de billets. On modélise un comportement idéal de l'utilisateur par l'automate suivant: Décrire la contrainte de synchronisation entre l'utilisateur et le DAB. Dessiner le produit synchronisé des deux automates. 198
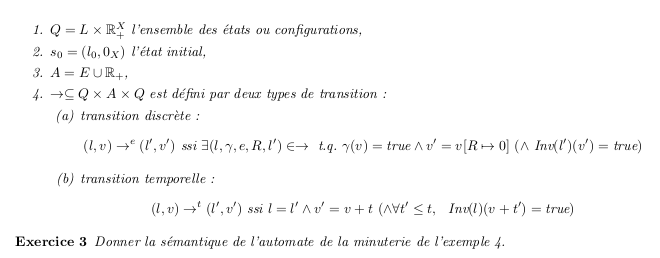
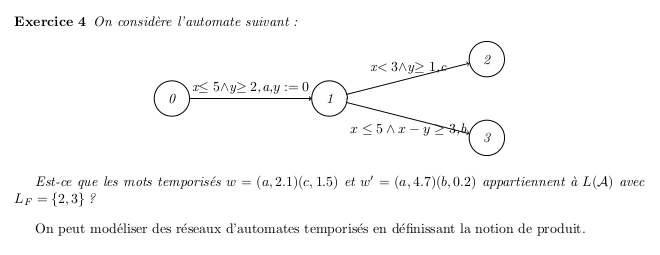
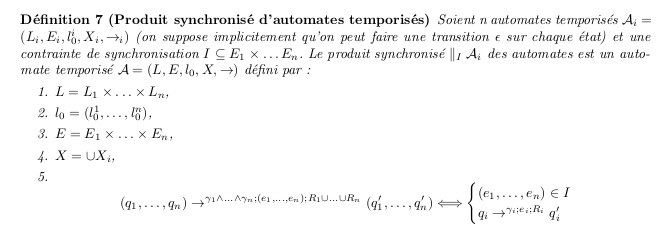
 un système temps réel.")
100 IV Introduction aux automates temporisés 1. Rappels sur les automates 2. Définition automates temporisés 3. Vérification de propriétés temporelles 199 Qu est-ce qu un automate temporisé? Les automates temporisés ont été introduits au début des années 90 par Rajeev Alur et David Dill. Le formalisme des automates temporisés peut servir à modéliser (ou spécifier) un système temps réel. On peut alors vérifier des propriétés sur ce modèle ou générer du code pour l'implanter. Dans la pratique, un automate temporisé est un automate étendu avec des horloges modélisant des contraintes et comportements temporels. Une minuterie 200
 horloge(s); - remettre une (ou plusieurs) horloge(s) à zéro.")
101 Qu est-ce qu un automate temporisé? On rajoute des variables particulières sur les automates, appelées horloges. Initialement toutes les horloges commencent à 0 et augmentent au même rythme. Sur une transition, on peut - tester la valeur d'une (ou de plusieurs) horloge(s); - remettre une (ou plusieurs) horloge(s) à zéro. Exercice: Modifier le DAB pour ajouter le comportement suivant: le code doit être entré en moins de 6 secondes. 201 Valuations 202



102 Définition formelle Une minuterie avec invariant 203 Sémantique 204

103 Chemins 205 Produit synchronisé 206
104 IV Introduction aux automates temporisés 1. Rappels sur les automates 2. Définition automates temporisés 3. Vérification de propriétés temporelles 207
Introduction aux systèmes temps réel. Iulian Ober IRIT [email protected]
 Introduction aux systèmes temps réel Iulian Ober IRIT [email protected] Définition Systèmes dont la correction ne dépend pas seulement des valeurs des résultats produits mais également des délais dans
Introduction aux systèmes temps réel Iulian Ober IRIT [email protected] Définition Systèmes dont la correction ne dépend pas seulement des valeurs des résultats produits mais également des délais dans
Surveillance de Scripts LUA et de réception d EVENT. avec LoriotPro Extended & Broadcast Edition
 Surveillance de Scripts LUA et de réception d EVENT avec LoriotPro Extended & Broadcast Edition L objectif de ce document est de présenter une solution de surveillance de processus LUA au sein de la solution
Surveillance de Scripts LUA et de réception d EVENT avec LoriotPro Extended & Broadcast Edition L objectif de ce document est de présenter une solution de surveillance de processus LUA au sein de la solution
Integrated Modular Avionic
 Integrated Modular Avionic Laurent Pautet [email protected] Version 1.1 Laurent Pautet 1 Systèmes avioniques Ensemble de fonctions permettant à un aéronef civil ou militaire d exécuter sa mission
Integrated Modular Avionic Laurent Pautet [email protected] Version 1.1 Laurent Pautet 1 Systèmes avioniques Ensemble de fonctions permettant à un aéronef civil ou militaire d exécuter sa mission
Introduction au temps réel
 Introduction au temps réel [email protected] Version 2.0 Définition d un système temps réel Un système temps réel se compose d'un ou plusieurs sous-systèmes devant répondre en un temps fini et spécifié
Introduction au temps réel [email protected] Version 2.0 Définition d un système temps réel Un système temps réel se compose d'un ou plusieurs sous-systèmes devant répondre en un temps fini et spécifié
Exécutif temps réel Pierre-Yves Duval (cppm)
") Exécutif temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 Plan Exécutif Tâches Evénements et synchronisation Partage de ressources Communications
Exécutif temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 Plan Exécutif Tâches Evénements et synchronisation Partage de ressources Communications
Instructions pour mettre à jour un HFFv2 v1.x.yy v2.0.00
 Instructions pour mettre à jour un HFFv2 v1.x.yy v2.0.00 HFFv2 1. OBJET L accroissement de la taille de code sur la version 2.0.00 a nécessité une évolution du mapping de la flash. La conséquence de ce
Instructions pour mettre à jour un HFFv2 v1.x.yy v2.0.00 HFFv2 1. OBJET L accroissement de la taille de code sur la version 2.0.00 a nécessité une évolution du mapping de la flash. La conséquence de ce
APPENDIX 6 BONUS RING FORMAT
 #4 EN FRANÇAIS CI-DESSOUS Preamble and Justification This motion is being presented to the membership as an alternative format for clubs to use to encourage increased entries, both in areas where the exhibitor
#4 EN FRANÇAIS CI-DESSOUS Preamble and Justification This motion is being presented to the membership as an alternative format for clubs to use to encourage increased entries, both in areas where the exhibitor
Ordonnancement temps réel
 Ordonnancement temps réel [email protected] Version 1.5 Problématique de l ordonnancement temps réel En fonctionnement normal, respecter les contraintes temporelles spécifiées par toutes les tâches
Ordonnancement temps réel [email protected] Version 1.5 Problématique de l ordonnancement temps réel En fonctionnement normal, respecter les contraintes temporelles spécifiées par toutes les tâches
Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre. Partie I : Introduction
 Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre Partie I : Introduction Plan de la première partie Quelques définitions Caractéristiques communes des applications temps-réel Exemples d
Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre Partie I : Introduction Plan de la première partie Quelques définitions Caractéristiques communes des applications temps-réel Exemples d
StruxureWare Power Monitoring v7.0. La nouvelle génération en matière de logiciel de gestion complète d énergie
 StruxureWare Power Monitoring v7.0 La nouvelle génération en matière de logiciel de gestion complète d énergie Évolution des deux plate-formes originales Power Monitoring v7.0 SMS ION Enterprise 2012 Struxureware
StruxureWare Power Monitoring v7.0 La nouvelle génération en matière de logiciel de gestion complète d énergie Évolution des deux plate-formes originales Power Monitoring v7.0 SMS ION Enterprise 2012 Struxureware
Génération de code binaire pour application multimedia : une approche au vol
 Génération de binaire pour application multimedia : une approche au vol http://hpbcg.org/ Henri-Pierre Charles Université de Versailles Saint-Quentin en Yvelines 3 Octobre 2009 Présentation Présentation
Génération de binaire pour application multimedia : une approche au vol http://hpbcg.org/ Henri-Pierre Charles Université de Versailles Saint-Quentin en Yvelines 3 Octobre 2009 Présentation Présentation
Exclusion Mutuelle. Arnaud Labourel Courriel : [email protected]. Université de Provence. 9 février 2011
 Arnaud Labourel Courriel : [email protected] Université de Provence 9 février 2011 Arnaud Labourel (Université de Provence) Exclusion Mutuelle 9 février 2011 1 / 53 Contexte Epistémologique
Arnaud Labourel Courriel : [email protected] Université de Provence 9 février 2011 Arnaud Labourel (Université de Provence) Exclusion Mutuelle 9 février 2011 1 / 53 Contexte Epistémologique
Paxton. ins-20605. Net2 desktop reader USB
 Paxton ins-20605 Net2 desktop reader USB 1 3 2 4 1 2 Desktop Reader The desktop reader is designed to sit next to the PC. It is used for adding tokens to a Net2 system and also for identifying lost cards.
Paxton ins-20605 Net2 desktop reader USB 1 3 2 4 1 2 Desktop Reader The desktop reader is designed to sit next to the PC. It is used for adding tokens to a Net2 system and also for identifying lost cards.
Stratégie DataCenters Société Générale Enjeux, objectifs et rôle d un partenaire comme Data4
 Stratégie DataCenters Société Générale Enjeux, objectifs et rôle d un partenaire comme Data4 Stéphane MARCHINI Responsable Global des services DataCenters Espace Grande Arche Paris La Défense SG figures
Stratégie DataCenters Société Générale Enjeux, objectifs et rôle d un partenaire comme Data4 Stéphane MARCHINI Responsable Global des services DataCenters Espace Grande Arche Paris La Défense SG figures
Exercices sur SQL server 2000
 Exercices sur SQL server 2000 La diagramme de classe : Exercices sur SQL server 2000 Le modèle relationnel correspondant : 1 Créer les tables Clic-droit on Tables et choisir «New Table» Créer la table
Exercices sur SQL server 2000 La diagramme de classe : Exercices sur SQL server 2000 Le modèle relationnel correspondant : 1 Créer les tables Clic-droit on Tables et choisir «New Table» Créer la table
Plan. Department of Informatics
 Plan 1. Application Servers 2. Servlets, JSP, JDBC 3. J2EE: Vue d ensemble 4. Distributed Programming 5. Enterprise JavaBeans 6. Enterprise JavaBeans: Special Topics 7. Prise de recul critique Enterprise
Plan 1. Application Servers 2. Servlets, JSP, JDBC 3. J2EE: Vue d ensemble 4. Distributed Programming 5. Enterprise JavaBeans 6. Enterprise JavaBeans: Special Topics 7. Prise de recul critique Enterprise
This is a preview - click here to buy the full publication NORME INTERNATIONALE INTERNATIONAL STAN DARD. Telecontrol equipment and systems
 NORME INTERNATIONALE INTERNATIONAL STAN DARD CEI IEC 870-3 Première édition First edition 1989-03 Matériels et systèmes de téléconduite Troisième partie: Interfaces (caractéristiques électriques) Telecontrol
NORME INTERNATIONALE INTERNATIONAL STAN DARD CEI IEC 870-3 Première édition First edition 1989-03 Matériels et systèmes de téléconduite Troisième partie: Interfaces (caractéristiques électriques) Telecontrol
Temps Réel. Jérôme Pouiller <[email protected]> Septembre 2011
 Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Cours 1 : La compilation
 /38 Interprétation des programmes Cours 1 : La compilation Yann Régis-Gianas [email protected] PPS - Université Denis Diderot Paris 7 2/38 Qu est-ce que la compilation? Vous avez tous déjà
/38 Interprétation des programmes Cours 1 : La compilation Yann Régis-Gianas [email protected] PPS - Université Denis Diderot Paris 7 2/38 Qu est-ce que la compilation? Vous avez tous déjà
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE
 EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
WEB page builder and server for SCADA applications usable from a WEB navigator
 Générateur de pages WEB et serveur pour supervision accessible à partir d un navigateur WEB WEB page builder and server for SCADA applications usable from a WEB navigator opyright 2007 IRAI Manual Manuel
Générateur de pages WEB et serveur pour supervision accessible à partir d un navigateur WEB WEB page builder and server for SCADA applications usable from a WEB navigator opyright 2007 IRAI Manual Manuel
RTDS G3. Emmanuel Gaudin [email protected]
 RTDS G3 Emmanuel Gaudin [email protected] PragmaDev Dédiée au développement d un AGL pour le développement des applications temps réel et embarquées. Réseau de partenaires: Formations, Service,
RTDS G3 Emmanuel Gaudin [email protected] PragmaDev Dédiée au développement d un AGL pour le développement des applications temps réel et embarquées. Réseau de partenaires: Formations, Service,
M2-Images. Rendu Temps Réel - OpenGL 4 et compute shaders. J.C. Iehl. December 18, 2013
 Rendu Temps Réel - OpenGL 4 et compute shaders December 18, 2013 résumé des épisodes précédents... création des objets opengl, organisation des données, configuration du pipeline, draw,... opengl 4.3 :
Rendu Temps Réel - OpenGL 4 et compute shaders December 18, 2013 résumé des épisodes précédents... création des objets opengl, organisation des données, configuration du pipeline, draw,... opengl 4.3 :
4. Outils pour la synchronisation F. Boyer, Laboratoire Lig [email protected]
 4. Outils pour la synchronisation F. Boyer, Laboratoire Lig [email protected] Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
4. Outils pour la synchronisation F. Boyer, Laboratoire Lig [email protected] Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
Contents Windows 8.1... 2
 Workaround: Installation of IRIS Devices on Windows 8 Contents Windows 8.1... 2 English Français Windows 8... 13 English Français Windows 8.1 1. English Before installing an I.R.I.S. Device, we need to
Workaround: Installation of IRIS Devices on Windows 8 Contents Windows 8.1... 2 English Français Windows 8... 13 English Français Windows 8.1 1. English Before installing an I.R.I.S. Device, we need to
VTP. LAN Switching and Wireless Chapitre 4
 VTP LAN Switching and Wireless Chapitre 4 ITE I Chapter 6 2006 Cisco Systems, Inc. All rights reserved. Cisco Public 1 Pourquoi VTP? Le défi de la gestion VLAN La complexité de gestion des VLANs et des
VTP LAN Switching and Wireless Chapitre 4 ITE I Chapter 6 2006 Cisco Systems, Inc. All rights reserved. Cisco Public 1 Pourquoi VTP? Le défi de la gestion VLAN La complexité de gestion des VLANs et des
Archived Content. Contenu archivé
 ARCHIVED - Archiving Content ARCHIVÉE - Contenu archivé Archived Content Contenu archivé Information identified as archived is provided for reference, research or recordkeeping purposes. It is not subject
ARCHIVED - Archiving Content ARCHIVÉE - Contenu archivé Archived Content Contenu archivé Information identified as archived is provided for reference, research or recordkeeping purposes. It is not subject
Les processus légers : threads. Système L3, 2014-2015 1/31
 Les processus légers : threads Système L3, 2014-2015 1/31 Les threads Les threads sont des processus légers exécutés à l intérieur d un processus L exécution des threads est concurrente Il existe toujours
Les processus légers : threads Système L3, 2014-2015 1/31 Les threads Les threads sont des processus légers exécutés à l intérieur d un processus L exécution des threads est concurrente Il existe toujours
How to Login to Career Page
 How to Login to Career Page BASF Canada July 2013 To view this instruction manual in French, please scroll down to page 16 1 Job Postings How to Login/Create your Profile/Sign Up for Job Posting Notifications
How to Login to Career Page BASF Canada July 2013 To view this instruction manual in French, please scroll down to page 16 1 Job Postings How to Login/Create your Profile/Sign Up for Job Posting Notifications
INSTRUMENTS DE MESURE SOFTWARE. Management software for remote and/or local monitoring networks
 INSTRUMENTS DE MESURE SOFTWARE SOFTWARE Logiciel de supervision des réseaux locaux et/ou distants Management software for remote and/or local monitoring networks MIDAs EVO 4 niveaux de fonctionnalités
INSTRUMENTS DE MESURE SOFTWARE SOFTWARE Logiciel de supervision des réseaux locaux et/ou distants Management software for remote and/or local monitoring networks MIDAs EVO 4 niveaux de fonctionnalités
Institut français des sciences et technologies des transports, de l aménagement
 Institut français des sciences et technologies des transports, de l aménagement et des réseaux Session 3 Big Data and IT in Transport: Applications, Implications, Limitations Jacques Ehrlich/IFSTTAR h/ifsttar
Institut français des sciences et technologies des transports, de l aménagement et des réseaux Session 3 Big Data and IT in Transport: Applications, Implications, Limitations Jacques Ehrlich/IFSTTAR h/ifsttar
UML : Unified Modeling Language
 UML : Unified Modeling Language Recommended: UML distilled A brief guide to the standard Object Modeling Language Addison Wesley based on Frank Maurer lecture, Univ. of Calgary in french : uml.free.fr/index.html
UML : Unified Modeling Language Recommended: UML distilled A brief guide to the standard Object Modeling Language Addison Wesley based on Frank Maurer lecture, Univ. of Calgary in french : uml.free.fr/index.html
Software and Hardware Datasheet / Fiche technique du logiciel et du matériel
 Software and Hardware Datasheet / Fiche technique du logiciel et du matériel 1 System requirements Windows Windows 98, ME, 2000, XP, Vista 32/64, Seven 1 Ghz CPU 512 MB RAM 150 MB free disk space 1 CD
Software and Hardware Datasheet / Fiche technique du logiciel et du matériel 1 System requirements Windows Windows 98, ME, 2000, XP, Vista 32/64, Seven 1 Ghz CPU 512 MB RAM 150 MB free disk space 1 CD
Introduction aux systèmes temps réel
 Introduction aux systèmes temps réel Frank Singhoff Bureau C-203 Université de Brest, France LISyC/EA 3883 [email protected] UE applications de l informatique, Université de Brest Page 1/22 Plan du
Introduction aux systèmes temps réel Frank Singhoff Bureau C-203 Université de Brest, France LISyC/EA 3883 [email protected] UE applications de l informatique, Université de Brest Page 1/22 Plan du
TABLE DES MATIERES A OBJET PROCEDURE DE CONNEXION
 1 12 rue Denis Papin 37300 JOUE LES TOURS Tel: 02.47.68.34.00 Fax: 02.47.68.35.48 www.herve consultants.net contacts@herve consultants.net TABLE DES MATIERES A Objet...1 B Les équipements et pré-requis...2
1 12 rue Denis Papin 37300 JOUE LES TOURS Tel: 02.47.68.34.00 Fax: 02.47.68.35.48 www.herve consultants.net contacts@herve consultants.net TABLE DES MATIERES A Objet...1 B Les équipements et pré-requis...2
Logiciel Libre & qualité. Présentation
 Logiciel Libre & qualité Alain RENAULT Grégory SERONT Présentation Alain RENAULT Cetic (2001) Responsable des projets Qualité micro-évaluation évaluations OWPL accompagnements en entreprise FUNDP (1998-2001)
Logiciel Libre & qualité Alain RENAULT Grégory SERONT Présentation Alain RENAULT Cetic (2001) Responsable des projets Qualité micro-évaluation évaluations OWPL accompagnements en entreprise FUNDP (1998-2001)
physicien diplômé EPFZ originaire de France présentée acceptée sur proposition Thèse no. 7178
 Thèse no. 7178 PROBLEMES D'OPTIMISATION DANS LES SYSTEMES DE CHAUFFAGE A DISTANCE présentée à l'ecole POLYTECHNIQUE FEDERALE DE ZURICH pour l'obtention du titre de Docteur es sciences naturelles par Alain
Thèse no. 7178 PROBLEMES D'OPTIMISATION DANS LES SYSTEMES DE CHAUFFAGE A DISTANCE présentée à l'ecole POLYTECHNIQUE FEDERALE DE ZURICH pour l'obtention du titre de Docteur es sciences naturelles par Alain
03/04/2007. Tâche 1 Tâche 2 Tâche 3. Système Unix. Time sharing
 3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
ORDONNANCEMENT CONJOINT DE TÂCHES ET DE MESSAGES DANS LES RÉSEAUX TEMPS RÉELS 4. QUELQUES EXEMPLES DU DYNAMISME ACTUEL DU TEMPS RÉEL
 i LE TEMPS RÉEL 1. PRÉSENTATION DU TEMPS RÉEL 1.1. APPLICATIONS TEMPS RÉEL 1.2. CONTRAINTES DE TEMPS RÉEL 2. STRUCTURES D'ACCUEIL POUR LE TEMPS RÉEL 2.1. EXÉCUTIFS TEMPS RÉEL 2.2. RÉSEAUX LOCAUX TEMPS
i LE TEMPS RÉEL 1. PRÉSENTATION DU TEMPS RÉEL 1.1. APPLICATIONS TEMPS RÉEL 1.2. CONTRAINTES DE TEMPS RÉEL 2. STRUCTURES D'ACCUEIL POUR LE TEMPS RÉEL 2.1. EXÉCUTIFS TEMPS RÉEL 2.2. RÉSEAUX LOCAUX TEMPS
NOM ENTREPRISE. Document : Plan Qualité Spécifique du Projet / Project Specific Quality Plan
 Document : Plan Qualité Spécifique du Projet Project Specific Quality Plan Référence Reference : QP-3130-Rev 01 Date Date : 12022008 Nombre de Pages Number of Pages : 6 Projet Project : JR 100 Rédacteur
Document : Plan Qualité Spécifique du Projet Project Specific Quality Plan Référence Reference : QP-3130-Rev 01 Date Date : 12022008 Nombre de Pages Number of Pages : 6 Projet Project : JR 100 Rédacteur
Once the installation is complete, you can delete the temporary Zip files..
 Sommaire Installation... 2 After the download... 2 From a CD... 2 Access codes... 2 DirectX Compatibility... 2 Using the program... 2 Structure... 4 Lier une structure à une autre... 4 Personnaliser une
Sommaire Installation... 2 After the download... 2 From a CD... 2 Access codes... 2 DirectX Compatibility... 2 Using the program... 2 Structure... 4 Lier une structure à une autre... 4 Personnaliser une
Application Form/ Formulaire de demande
 Application Form/ Formulaire de demande Ecosystem Approaches to Health: Summer Workshop and Field school Approches écosystémiques de la santé: Atelier intensif et stage d été Please submit your application
Application Form/ Formulaire de demande Ecosystem Approaches to Health: Summer Workshop and Field school Approches écosystémiques de la santé: Atelier intensif et stage d été Please submit your application
Règlement sur le télémarketing et les centres d'appel. Call Centres Telemarketing Sales Regulation
 THE CONSUMER PROTECTION ACT (C.C.S.M. c. C200) Call Centres Telemarketing Sales Regulation LOI SUR LA PROTECTION DU CONSOMMATEUR (c. C200 de la C.P.L.M.) Règlement sur le télémarketing et les centres d'appel
THE CONSUMER PROTECTION ACT (C.C.S.M. c. C200) Call Centres Telemarketing Sales Regulation LOI SUR LA PROTECTION DU CONSOMMATEUR (c. C200 de la C.P.L.M.) Règlement sur le télémarketing et les centres d'appel
HAUTE DISPONIBILITÉ DE MACHINE VIRTUELLE AVEC HYPER-V 2012 R2 PARTIE CONFIGURATION OPENVPN SUR PFSENSE
 HAUTE DISPONIBILITÉ DE MACHINE VIRTUELLE AVEC HYPER-V 2012 R2 PARTIE CONFIGURATION OPENVPN SUR PFSENSE Projet de semestre ITI soir 4ème année Résumé configuration OpenVpn sur pfsense 2.1 Etudiant :Tarek
HAUTE DISPONIBILITÉ DE MACHINE VIRTUELLE AVEC HYPER-V 2012 R2 PARTIE CONFIGURATION OPENVPN SUR PFSENSE Projet de semestre ITI soir 4ème année Résumé configuration OpenVpn sur pfsense 2.1 Etudiant :Tarek
Évaluation et implémentation des langages
 Évaluation et implémentation des langages Les langages de programmation et le processus de programmation Critères de conception et d évaluation des langages de programmation Les fondations de l implémentation
Évaluation et implémentation des langages Les langages de programmation et le processus de programmation Critères de conception et d évaluation des langages de programmation Les fondations de l implémentation
SERVEUR DÉDIÉ DOCUMENTATION
 SERVEUR DÉDIÉ DOCUMENTATION Release 5.0.6.0 19 Juillet 2013 Copyright 2013 GIANTS Software GmbH, All Rights Reserved. 1/9 CHANGE LOG Correction de bug divers (5.0.6.0) Ajout d une option de relance automatique
SERVEUR DÉDIÉ DOCUMENTATION Release 5.0.6.0 19 Juillet 2013 Copyright 2013 GIANTS Software GmbH, All Rights Reserved. 1/9 CHANGE LOG Correction de bug divers (5.0.6.0) Ajout d une option de relance automatique
Fonctions intégrées. Nouvelles solutions universelles & système de communication
 Fonctions intégrées Nouvelles solutions universelles & système de communication avec les nouvelles solutions universelles Hazemeyer... avancez d une génération thanks to the new flexible solutions by Hazemeyer...
Fonctions intégrées Nouvelles solutions universelles & système de communication avec les nouvelles solutions universelles Hazemeyer... avancez d une génération thanks to the new flexible solutions by Hazemeyer...
Instructions Mozilla Thunderbird Page 1
 Instructions Mozilla Thunderbird Page 1 Instructions Mozilla Thunderbird Ce manuel est écrit pour les utilisateurs qui font déjà configurer un compte de courrier électronique dans Mozilla Thunderbird et
Instructions Mozilla Thunderbird Page 1 Instructions Mozilla Thunderbird Ce manuel est écrit pour les utilisateurs qui font déjà configurer un compte de courrier électronique dans Mozilla Thunderbird et
PEINTAMELEC Ingénierie
 PEINTAMELEC Ingénierie Moteurs de productivité Drivers of productivity Automatisation de systèmes de production Informatique industrielle Manutention Contrôle Assemblage Automating production systems Industrial
PEINTAMELEC Ingénierie Moteurs de productivité Drivers of productivity Automatisation de systèmes de production Informatique industrielle Manutention Contrôle Assemblage Automating production systems Industrial
Algorithmique et Programmation, IMA
 Algorithmique et Programmation, IMA Cours 2 : C Premier Niveau / Algorithmique Université Lille 1 - Polytech Lille Notations, identificateurs Variables et Types de base Expressions Constantes Instructions
Algorithmique et Programmation, IMA Cours 2 : C Premier Niveau / Algorithmique Université Lille 1 - Polytech Lille Notations, identificateurs Variables et Types de base Expressions Constantes Instructions
Qualité du logiciel: Méthodes de test
 Qualité du logiciel: Méthodes de test Matthieu Amiguet 2004 2005 Analyse statique de code Analyse statique de code Étudier le programme source sans exécution Généralement réalisée avant les tests d exécution
Qualité du logiciel: Méthodes de test Matthieu Amiguet 2004 2005 Analyse statique de code Analyse statique de code Étudier le programme source sans exécution Généralement réalisée avant les tests d exécution
Outils d'analyse de la sécurité des réseaux. HADJALI Anis VESA Vlad
 Outils d'analyse de la sécurité des réseaux HADJALI Anis VESA Vlad Plan Introduction Scanneurs de port Les systèmes de détection d'intrusion (SDI) Les renifleurs (sniffer) Exemples d'utilisation Conclusions
Outils d'analyse de la sécurité des réseaux HADJALI Anis VESA Vlad Plan Introduction Scanneurs de port Les systèmes de détection d'intrusion (SDI) Les renifleurs (sniffer) Exemples d'utilisation Conclusions
Description du logiciel Modbus RTU
 Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 1 de 57 Description du logiciel Modbus RTU Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 2 de 57 Sommaire Description
Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 1 de 57 Description du logiciel Modbus RTU Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 2 de 57 Sommaire Description
Quick Start Guide This guide is intended to get you started with Rational ClearCase or Rational ClearCase MultiSite.
 Rational ClearCase or ClearCase MultiSite Version 7.0.1 Quick Start Guide This guide is intended to get you started with Rational ClearCase or Rational ClearCase MultiSite. Product Overview IBM Rational
Rational ClearCase or ClearCase MultiSite Version 7.0.1 Quick Start Guide This guide is intended to get you started with Rational ClearCase or Rational ClearCase MultiSite. Product Overview IBM Rational
Surveillance et maintenance prédictive : évaluation de la latence de fautes. Zineb SIMEU-ABAZI Univ. Joseph Fourier, LAG)
") Surveillance et maintenance prédictive : évaluation de la latence de fautes Zineb SIMEU-ABAZI Univ. Joseph Fourier, LAG) SURVEILLANCE Analyser une situation et fournir des indicateurs! Détection de symptômes!
Surveillance et maintenance prédictive : évaluation de la latence de fautes Zineb SIMEU-ABAZI Univ. Joseph Fourier, LAG) SURVEILLANCE Analyser une situation et fournir des indicateurs! Détection de symptômes!
I. Programmation I. 1 Ecrire un programme en Scilab traduisant l organigramme montré ci-après (on pourra utiliser les annexes):
:") Master Chimie Fondamentale et Appliquée : spécialité «Ingénierie Chimique» Examen «Programmation, Simulation des procédés» avril 2008a Nom : Prénom : groupe TD : I. Programmation I. 1 Ecrire un programme
Master Chimie Fondamentale et Appliquée : spécialité «Ingénierie Chimique» Examen «Programmation, Simulation des procédés» avril 2008a Nom : Prénom : groupe TD : I. Programmation I. 1 Ecrire un programme
as Architecture des Systèmes d Information
 Plan Plan Programmation - Introduction - Nicolas Malandain March 14, 2005 Introduction à Java 1 Introduction Présentation Caractéristiques Le langage Java 2 Types et Variables Types simples Types complexes
Plan Plan Programmation - Introduction - Nicolas Malandain March 14, 2005 Introduction à Java 1 Introduction Présentation Caractéristiques Le langage Java 2 Types et Variables Types simples Types complexes
Cours A7 : Temps Réel
 Cours A7 : Temps Réel Pierre.Paradinas / @ / cnam.fr Cnam/Cedric Systèmes Enfouis et Embarqués (SEE) Organisation des cours 12 prochaines séances 6 janvier au 24 mars, Partiel le 27 janvier, Les 3 et 24
Cours A7 : Temps Réel Pierre.Paradinas / @ / cnam.fr Cnam/Cedric Systèmes Enfouis et Embarqués (SEE) Organisation des cours 12 prochaines séances 6 janvier au 24 mars, Partiel le 27 janvier, Les 3 et 24
XtremWeb-HEP 8.0.0. Interconnecting jobs over DG. Virtualization over DG. Oleg Lodygensky Laboratoire de l Accélérateur Linéaire
 XtremWeb-HEP 8.0.0 Interconnecting jobs over DG Virtualization over DG Oleg Lodygensky Objectives 1.Deploy Virtual Machines in XtremWeb-HEP desktop grid to: protect volunteer resources generalize «pilot
XtremWeb-HEP 8.0.0 Interconnecting jobs over DG Virtualization over DG Oleg Lodygensky Objectives 1.Deploy Virtual Machines in XtremWeb-HEP desktop grid to: protect volunteer resources generalize «pilot
Package Contents. System Requirements. Before You Begin
 Package Contents DWA-125 Wireless 150 USB Adapter CD-ROM (contains software, drivers, and manual) Cradle If any of the above items are missing, please contact your reseller. System Requirements A computer
Package Contents DWA-125 Wireless 150 USB Adapter CD-ROM (contains software, drivers, and manual) Cradle If any of the above items are missing, please contact your reseller. System Requirements A computer
REALISATION d'un. ORDONNANCEUR à ECHEANCES
 REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
RAPID 3.34 - Prenez le contrôle sur vos données
 RAPID 3.34 - Prenez le contrôle sur vos données Parmi les fonctions les plus demandées par nos utilisateurs, la navigation au clavier et la possibilité de disposer de champs supplémentaires arrivent aux
RAPID 3.34 - Prenez le contrôle sur vos données Parmi les fonctions les plus demandées par nos utilisateurs, la navigation au clavier et la possibilité de disposer de champs supplémentaires arrivent aux
Practice Direction. Class Proceedings
 Effective Date: 2010/07/01 Number: PD - 5 Title: Practice Direction Class Proceedings Summary: This Practice Direction describes the procedure for requesting the assignment of a judge in a proceeding under
Effective Date: 2010/07/01 Number: PD - 5 Title: Practice Direction Class Proceedings Summary: This Practice Direction describes the procedure for requesting the assignment of a judge in a proceeding under
The new consumables catalogue from Medisoft is now updated. Please discover this full overview of all our consumables available to you.
 General information 120426_CCD_EN_FR Dear Partner, The new consumables catalogue from Medisoft is now updated. Please discover this full overview of all our consumables available to you. To assist navigation
General information 120426_CCD_EN_FR Dear Partner, The new consumables catalogue from Medisoft is now updated. Please discover this full overview of all our consumables available to you. To assist navigation
Windows Server 2008. Chapitre 1: Découvrir Windows Server 2008
 Windows Server 2008 Chapitre 1: Découvrir Windows Server 2008 Objectives Identifier les caractéristiques de chaque édition de Windows Server 2008 Identifier les caractéristiques généraux de Windows Server
Windows Server 2008 Chapitre 1: Découvrir Windows Server 2008 Objectives Identifier les caractéristiques de chaque édition de Windows Server 2008 Identifier les caractéristiques généraux de Windows Server
3615 SELFIE. http://graffitiresearchlab.fr HOW-TO / GUIDE D'UTILISATION
 3615 SELFIE http://graffitiresearchlab.fr HOW-TO / GUIDE D'UTILISATION Hardware : Minitel Computer DIN FM545 45 connector (http://www.gotronic.fr/art-fiche-din-fm545-4747.htm) Cable Arduino compatible
3615 SELFIE http://graffitiresearchlab.fr HOW-TO / GUIDE D'UTILISATION Hardware : Minitel Computer DIN FM545 45 connector (http://www.gotronic.fr/art-fiche-din-fm545-4747.htm) Cable Arduino compatible
Face Recognition Performance: Man vs. Machine
 1 Face Recognition Performance: Man vs. Machine Andy Adler Systems and Computer Engineering Carleton University, Ottawa, Canada Are these the same person? 2 3 Same person? Yes I have just demonstrated
1 Face Recognition Performance: Man vs. Machine Andy Adler Systems and Computer Engineering Carleton University, Ottawa, Canada Are these the same person? 2 3 Same person? Yes I have just demonstrated
TP: Représentation des signaux binaires. 1 Simulation d un message binaire - Codage en ligne
 Objectifs : Ce TP est relatif aux différentes méthodes de codage d une information binaire, et à la transmission en bande de base de cette information. Les grandes lignes de ce TP sont l étude des méthodes
Objectifs : Ce TP est relatif aux différentes méthodes de codage d une information binaire, et à la transmission en bande de base de cette information. Les grandes lignes de ce TP sont l étude des méthodes
Modélisation des interfaces matériel/logiciel
 Modélisation des interfaces matériel/logiciel Présenté par Frédéric Pétrot Patrice Gerin Alexandre Chureau Hao Shen Aimen Bouchhima Ahmed Jerraya 1/28 TIMA Laboratory SLS Group 46 Avenue Félix VIALLET
Modélisation des interfaces matériel/logiciel Présenté par Frédéric Pétrot Patrice Gerin Alexandre Chureau Hao Shen Aimen Bouchhima Ahmed Jerraya 1/28 TIMA Laboratory SLS Group 46 Avenue Félix VIALLET
PARIS ROISSY CHARLES DE GAULLE
 GPS 2 34 1 E 49 0 46 N GPS* 2 56 56 E 49 0 12 N Votre contact / Your contact: et / and: Accueil : Cabines téléphoniques publiques Reception: Public telephone kiosks Navette Shuttle AÉROPORT DE TT CAR TRANSIT
GPS 2 34 1 E 49 0 46 N GPS* 2 56 56 E 49 0 12 N Votre contact / Your contact: et / and: Accueil : Cabines téléphoniques publiques Reception: Public telephone kiosks Navette Shuttle AÉROPORT DE TT CAR TRANSIT
Introduction à la programmation concurrente
 Introduction à la programmation concurrente Moniteurs Yann Thoma Reconfigurable and Embedded Digital Systems Institute Haute Ecole d Ingénierie et de Gestion du Canton de Vaud This work is licensed under
Introduction à la programmation concurrente Moniteurs Yann Thoma Reconfigurable and Embedded Digital Systems Institute Haute Ecole d Ingénierie et de Gestion du Canton de Vaud This work is licensed under
Utiliser une WebCam. Micro-ordinateurs, informations, idées, trucs et astuces
 Micro-ordinateurs, informations, idées, trucs et astuces Utiliser une WebCam Auteur : François CHAUSSON Date : 8 février 2008 Référence : utiliser une WebCam.doc Préambule Voici quelques informations utiles
Micro-ordinateurs, informations, idées, trucs et astuces Utiliser une WebCam Auteur : François CHAUSSON Date : 8 février 2008 Référence : utiliser une WebCam.doc Préambule Voici quelques informations utiles
Mécanismes de protection dans AUTOSAR OS
 Mécanismes de protection dans AUTOSAR OS Nicolas Navet, RTaW Hervé Perrault, PSA Peugeot Citroën Conférence à RTS 09 le 31/03/2009 Plan 1. Code ECU : besoin de ré-utilisabilité et multi-source 2. Concepts
Mécanismes de protection dans AUTOSAR OS Nicolas Navet, RTaW Hervé Perrault, PSA Peugeot Citroën Conférence à RTS 09 le 31/03/2009 Plan 1. Code ECU : besoin de ré-utilisabilité et multi-source 2. Concepts
Initiation au HPC - Généralités
 Initiation au HPC - Généralités Éric Ramat et Julien Dehos Université du Littoral Côte d Opale M2 Informatique 2 septembre 2015 Éric Ramat et Julien Dehos Initiation au HPC - Généralités 1/49 Plan du cours
Initiation au HPC - Généralités Éric Ramat et Julien Dehos Université du Littoral Côte d Opale M2 Informatique 2 septembre 2015 Éric Ramat et Julien Dehos Initiation au HPC - Généralités 1/49 Plan du cours
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Contrôle d'accès Access control. Notice technique / Technical Manual
 p.1/18 Contrôle d'accès Access control INFX V2-AI Notice technique / Technical Manual p.2/18 Sommaire / Contents Remerciements... 3 Informations et recommandations... 4 Caractéristiques techniques... 5
p.1/18 Contrôle d'accès Access control INFX V2-AI Notice technique / Technical Manual p.2/18 Sommaire / Contents Remerciements... 3 Informations et recommandations... 4 Caractéristiques techniques... 5
Principe de TrueCrypt. Créer un volume pour TrueCrypt
 Sommaire : Principe de TrueCrypt...1 Créer un volume pour TrueCrypt...1 Premier montage...6 Réglages...8 Save Currently Mounted Volumes as Favorite...8 Settings > Preferences...9 TrueCrypt Traveller pour
Sommaire : Principe de TrueCrypt...1 Créer un volume pour TrueCrypt...1 Premier montage...6 Réglages...8 Save Currently Mounted Volumes as Favorite...8 Settings > Preferences...9 TrueCrypt Traveller pour
RULE 5 - SERVICE OF DOCUMENTS RÈGLE 5 SIGNIFICATION DE DOCUMENTS. Rule 5 / Règle 5
 RULE 5 - SERVICE OF DOCUMENTS General Rules for Manner of Service Notices of Application and Other Documents 5.01 (1) A notice of application or other document may be served personally, or by an alternative
RULE 5 - SERVICE OF DOCUMENTS General Rules for Manner of Service Notices of Application and Other Documents 5.01 (1) A notice of application or other document may be served personally, or by an alternative
1 Mesure de la performance d un système temps réel : la gigue
 TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
PACKZ System Requirements. Version: 2015-05-27. Version: 2015-05-27 Copyright 2015, PACKZ Software GmbH. 1
 PACKZ System Requirements Version: 2015-05-27 Copyright 2015, PACKZ Software GmbH. All rights reserved.this manual may not be copied, photocopied, reproduced, translated, or converted to any electronic
PACKZ System Requirements Version: 2015-05-27 Copyright 2015, PACKZ Software GmbH. All rights reserved.this manual may not be copied, photocopied, reproduced, translated, or converted to any electronic
Forthcoming Database
 DISS.ETH NO. 15802 Forthcoming Database A Framework Approach for Data Visualization Applications A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZURICH for the degree of Doctor of
DISS.ETH NO. 15802 Forthcoming Database A Framework Approach for Data Visualization Applications A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZURICH for the degree of Doctor of
Thank you for choosing the Mobile Broadband USB Stick. With your USB Stick, you can access a wireless network at high speed.
 Thank you for choosing the Mobile Broadband USB Stick. With your USB Stick, you can access a wireless network at high speed. Note: This manual describes the appearance of the USB Stick, as well as the
Thank you for choosing the Mobile Broadband USB Stick. With your USB Stick, you can access a wireless network at high speed. Note: This manual describes the appearance of the USB Stick, as well as the
Programmer en JAVA. par Tama ([email protected]( [email protected])
") Programmer en JAVA par Tama ([email protected]( [email protected]) Plan 1. Présentation de Java 2. Les bases du langage 3. Concepts avancés 4. Documentation 5. Index des mots-clés 6. Les erreurs fréquentes
Programmer en JAVA par Tama ([email protected]( [email protected]) Plan 1. Présentation de Java 2. Les bases du langage 3. Concepts avancés 4. Documentation 5. Index des mots-clés 6. Les erreurs fréquentes
Nouveautés printemps 2013
 » English Se désinscrire de la liste Nouveautés printemps 2013 19 mars 2013 Dans ce Flash Info, vous trouverez une description des nouveautés et mises à jour des produits La Capitale pour le printemps
» English Se désinscrire de la liste Nouveautés printemps 2013 19 mars 2013 Dans ce Flash Info, vous trouverez une description des nouveautés et mises à jour des produits La Capitale pour le printemps
sur le réseau de distribution
 EDF-R&D Département MIRE et Département EFESE 1, avenue du Général de Gaulle 92141 Clamart Impact qualité du site photovoltaïque "Association Soleil Marguerite" sur le réseau de distribution Responsable
EDF-R&D Département MIRE et Département EFESE 1, avenue du Général de Gaulle 92141 Clamart Impact qualité du site photovoltaïque "Association Soleil Marguerite" sur le réseau de distribution Responsable
Developing an alternative scenario in a case study for a single country. Mise en œuvre un scénario alternatif pour une étude de cas pour un seul pays
 Developing an alternative scenario in a case study for a single country Mise en œuvre un scénario alternatif pour une étude de cas pour un seul pays 1. Creating a new scenario based on an existing scenario
Developing an alternative scenario in a case study for a single country Mise en œuvre un scénario alternatif pour une étude de cas pour un seul pays 1. Creating a new scenario based on an existing scenario
Notice Technique / Technical Manual
 Contrôle d accès Access control Encodeur USB Mifare ENCOD-USB-AI Notice Technique / Technical Manual SOMMAIRE p.2/10 Sommaire Remerciements... 3 Informations et recommandations... 4 Caractéristiques techniques...
Contrôle d accès Access control Encodeur USB Mifare ENCOD-USB-AI Notice Technique / Technical Manual SOMMAIRE p.2/10 Sommaire Remerciements... 3 Informations et recommandations... 4 Caractéristiques techniques...
Le No.1 de l économie d énergie pour patinoires.
 Le No.1 de l économie d énergie pour patinoires. Partner of REALice system Economie d énergie et une meilleure qualité de glace La 2ème génération améliorée du système REALice bien connu, est livré en
Le No.1 de l économie d énergie pour patinoires. Partner of REALice system Economie d énergie et une meilleure qualité de glace La 2ème génération améliorée du système REALice bien connu, est livré en
Conception des systèmes répartis
 Conception des systèmes répartis Principes et concepts Gérard Padiou Département Informatique et Mathématiques appliquées ENSEEIHT Octobre 2012 Gérard Padiou Conception des systèmes répartis 1 / 37 plan
Conception des systèmes répartis Principes et concepts Gérard Padiou Département Informatique et Mathématiques appliquées ENSEEIHT Octobre 2012 Gérard Padiou Conception des systèmes répartis 1 / 37 plan
NanoSense. Protocole Modbus de la sonde Particules P4000. (Version 01F)
") NanoSense 123 rue de Bellevue, 92100 Boulogne Billancourt France Tél : 33-(0) 1 41 41 00 02, fax : 33-(0) 1 41 41 06 72 Protocole Modbus de la sonde Particules P4000 (Version 01F) Ver V01A V01B V01C V01D
NanoSense 123 rue de Bellevue, 92100 Boulogne Billancourt France Tél : 33-(0) 1 41 41 00 02, fax : 33-(0) 1 41 41 06 72 Protocole Modbus de la sonde Particules P4000 (Version 01F) Ver V01A V01B V01C V01D
Programmation C. Apprendre à développer des programmes simples dans le langage C
 Programmation C Apprendre à développer des programmes simples dans le langage C Notes de cours sont disponibles sur http://astro.u-strasbg.fr/scyon/stusm (attention les majuscules sont importantes) Modalités
Programmation C Apprendre à développer des programmes simples dans le langage C Notes de cours sont disponibles sur http://astro.u-strasbg.fr/scyon/stusm (attention les majuscules sont importantes) Modalités
NOTICE INSTALLATION. ARCHANGE Email Simplex Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE
 NOTICE INSTALLATION ARCHANGE Email Simplex Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE Date Version Marque de révision Rédaction 31/07/2012 1 - Nicolas AUBLIN 1) PRINCIPE DE FONCTIONNEMENT...
NOTICE INSTALLATION ARCHANGE Email Simplex Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE Date Version Marque de révision Rédaction 31/07/2012 1 - Nicolas AUBLIN 1) PRINCIPE DE FONCTIONNEMENT...
1-Introduction 2. 2-Installation de JBPM 3. 2-JBPM en action.7
 Sommaire 1-Introduction 2 1-1- BPM (Business Process Management)..2 1-2 J-Boss JBPM 2 2-Installation de JBPM 3 2-1 Architecture de JOBSS JBPM 3 2-2 Installation du moteur JBoss JBPM et le serveur d application
Sommaire 1-Introduction 2 1-1- BPM (Business Process Management)..2 1-2 J-Boss JBPM 2 2-Installation de JBPM 3 2-1 Architecture de JOBSS JBPM 3 2-2 Installation du moteur JBoss JBPM et le serveur d application
Cours 7 : Programmation d une chaîne d acquisition
 Cours 7 : Programmation d une chaîne d acquisition 4 Concepts 4 Programmation Cible Pentium : Langages de haut niveau Langage graphique G sous LabView + librairies de VI ; Langage C + librairies de fonctions
Cours 7 : Programmation d une chaîne d acquisition 4 Concepts 4 Programmation Cible Pentium : Langages de haut niveau Langage graphique G sous LabView + librairies de VI ; Langage C + librairies de fonctions
Argument-fetching dataflow machine de G.R. Gao et J.B. Dennis (McGill, 1988) = machine dataflow sans flux de données
 = machine dataflow sans flux de données") EARTH et Threaded-C: Éléments clés du manuel de références de Threaded-C Bref historique de EARTH et Threaded-C Ancêtres de l architecture EARTH: Slide 1 Machine à flux de données statique de J.B. Dennis
EARTH et Threaded-C: Éléments clés du manuel de références de Threaded-C Bref historique de EARTH et Threaded-C Ancêtres de l architecture EARTH: Slide 1 Machine à flux de données statique de J.B. Dennis
Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm)
") Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 - Evénements et architectures - Spécifications de performances
Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 - Evénements et architectures - Spécifications de performances