Samedis bénévoles spécial Arduino Workshop n 1
|
|
|
- Paulette Guérin
- il y a 10 ans
- Total affichages :
Transcription

1 Samedis bénévoles spécial Arduino Workshop n 1 FICHE F4 COMMANDER DES SERVOMOTEURS CLASSIQUES ET A ROTATION CONTINUE Contact : Paula Bruzzone Rouget Secrétariat général : 6, rue Emmanuel Pastré Evry - Tél. : [email protected]

2 SOMMAIRE 1. Les servomoteurs Piloter un servomoteur avec l Arduino Piloter un servomoteur classique Principe Application : pas à pas Montage Codage Autres exemples Piloter un servomoteur à rotation continue Principe Application : pas à pas Montage Codage A-t-on vraiment besoin d un Arduino pour faire çà? /14

3 1. Les servomoteurs Les servomoteurs sont des actionneurs. Très utilisés en modélisme et dans l industrie, ils ont comme caractéristique principale leur «couple», c'est-à-dire la force de rotation qu ils peuvent exercer. Plus un servomoteur aura de couple et plus il pourra actionner des «membres» lourds comme déplacer un bras qui porte une charge. Pour la robotique de loisirs, les servomoteurs ont en général peu de couple et sont de taille réduite, bien adaptée à un encombrement minimal et à une énergie disponible limitée. Les servomoteurs sont pilotés par un fil de commande et alimentés par deux autres fils. Habituellement, ces 3 fils sont rassemblés dans une prise au format standard. Un fil rouge est relié à l alimentation positive (+5 ou +6 V selon le servo), le fil noir est relié à la masse (GND) et le fil jaune est utilisé pour la commande. Il y aurait beaucoup à dire sur le fonctionnement d un servomoteur, ses composants, son moteur et le petit potentiomètre qui permet de connaître sa position mais cette fiche va droit au but et se limitera à son utilisation avec l Arduino. 2. Piloter un servomoteur avec l Arduino Le mode de commande d un servomoteur est standardisé : on envoie sur son fil de commande une impulsion dont la durée correspond à l angle désiré. Historiquement, cette impulsion était délivrée par un circuit oscillateur. Le circuit intégré NE555 est un exemple vedette du circuit utilisé. Avec la programmation de l Arduino, ce circuit n est plus nécessaire. Une bibliothèque (library) dédiée, la bibliothèque «servo», permet de piloter un servomoteur en lui transmettant simplement l angle sur lequel il souhaite se positionner. 3/14

4 0 Valeur d angle Valeur d angle 180 Ce qui permet de réaliser simplement des mouvements qui peuvent être complexes et de les automatiser. Les connaissances nécessaires au pilotage d un servomoteur sont : #include <Servo.h> Servo myservo; myservo.attach(9); myservo.write(90); myservo.write(angle); myservo.read(angle); L utilisation de la librairie servo.h qui prend en charge la communication de bas niveau entre l Arduino et le servomoteur. Les commandes précédées par # sont des ordres particuliers donnés au compilateur La création d un objet de type Servo, appelé ici myservo Le fil de commande de ce servo sera connecté au PIN 9 et l objet myservo pilotera ce PIN Demander au servomoteur de se déplacer à l angle désiré, soit de façon absolue en lui indiquant une valeur entière (90 ) dans le premier cas, soit en lui passant le contenu d une variable (Angle) compris entre 0 et 180, ce qui peut être utile par exemple pour donner une progressivité au déplacement en faisant varier l angle d un pas fixe (quelques degrés) par une boucle Pour lire la valeur de l angle du servomoteur 4/14

5 3. Piloter un servomoteur classique 3.1. Principe Prenons un exemple simple pour commencer : le vidage d un bac ou d une benne. Un bac est monté sur un axe solidaire de l axe d un servomoteur. Ce bac se remplit lentement et on souhaite le vider en appuyant sur un bouton Servomoteur angle = 0 Servomoteur angle = 90 Servomoteur angle = 0 Dans cet exemple, nous avons passé au servomoteur les commandes suivantes : 1. Angle = 90, le servomoteur a pivoté à angle droit vers la droite et vidé les balles 2. Angle = 0, le servomoteur a pivoté en sens inverse et retrouvé sa position de départ Entre les étapes 1 et 2, nous aurions pu ajouter un petit temps d attente ou de retard pour laisser le temps au bac de se vider complètement. L algorithme de cette action est donc assez simple : - Début - Fin Lorsque le bouton de vidage de bac est appuyé o Alors mettre le servo à l angle = 90 o Attendre 1 seconde o Mettre le servomoteur à l angle = 0 Bien évidement, au lieu d un bouton de vidange, nous aurions pu positionner un capteur qui aurait détecté que le bac était plein Application : pas à pas Montage Matériel nécessaire : 1 plaque d expérimentation, 1 module Arduino, 1 servomoteur «classique», un bouton poussoir ou un connecteur mâle-mâle. 5/14

6 Le module Arduino peut être alimenté par son câble USB et alimenter un servomoteur sans dommage. Au-delà, il est prudent de calculer la consommation totale car le port USB ne pourra délivrer que 500mA au maximum. Une alimentation séparée et correctement dimensionnée est conseillée. 1. Connecter le fil rouge du servo au +5V de l Arduino et le fil noir sur la masse GND 2. Connecter le fil jaune du servo sur le PIN 9 3. Connecter un fil du bouton poussoir sur le PIN 8 et l autre sur GND Le montage sur la plaque d expérimentation devrait ressembler à çà. 6/14

7 Codage 1. Lancer l IDE de l Arduino et créer un nouveau croquis ou ouvrir un nouvel onglet 2. Créer les variables en leur donnant un nom, un type et une valeur Avant le setup, il faut déclarer les variables que l on va utiliser, soit : - La librairie servo - Une variable servo : mysverse - Une variable PIN_SVERSE pour le PIN affecté au servo Utiliser une variable pour la valeur du PIN facilite la mise au point du code et son utilisation dans des modules différents : il suffira de personnaliser le code en affectant les numéros de PIN aux variables du code dans la partie déclaration. - Deux variables pour le bouton poussoir : une pour le PIN et une pour tester si le poussoir est pressé Notez les commentaires abondants qui éclaireront sur ce que fait le code lors de relectures futures ou d une analyse par quelqu un d autres que le développeur. 3. Initialiser les variables et le servo dans le setup Rappel : PinMode permet de définir le sens d utilisation d un PIN : en entrée (INPUT) ou en sortie (OUPUT) Le «pull-up» donne une valeur explicite à l état du PIN qui peut être aléatoire sinon du fait d interférences électriques L activation du servo est réalisée par l instruction attach 7/14

8 4. Coder l algorithme dans la boucle (loop()) Lorsque le bouton de vidage de bac est appuyé : A. Alors mettre le servo à l angle = 90 B. Attendre 1 seconde C. Mettre le servomoteur à l angle = 0 Initialement le PIN du poussoir est l état haut. Lorsqu on le presse, on relie la masse (GND) au PIN et il passe à l état bas. Avant de tester sa valeur, il faut la lire, c est pourquoi on affecte à la Poussoir_VERSE la valeur lue par digitalread sur le PIN correspondant. Ensuite, on teste cette valeur en la comparrant à LOW et dans ce cas on exécute les 3 instructions du bloc. Dans le cas contraire, on ne fait rien. 5. Il ne reste plus qu à relire et compiler : 8/14

9 6. Puis à téléverser et à tester! 3.3. Autres exemples Dans les exemples livrés avec l IDE, vous trouverez deux croquis intéressants : 1) Sweep, qui montre comment faire un balayage du servo dans les deux sens avec une boucle for : 9/14

10 Le balayage du croquis sweep peut être réutilisé dans deux situations : - la recherche d un déplacement progressif du servo, selon un pas fixe, en degrés ; - Le balayage de la zone située devant le robot par un sonar ou un capteur-émetteur infrarouge, pour détecter des obstacle. 2) Knob, qui permet de contrôler la position d un servomoteur à l aide d un potentiomètre. Le croquis knob illustre la commande d un servo avec un potentiomètre qui peut être celui d un joystick, ce qui est très pratique pour la commande d un bras robotisé, par exemple. Une autre application est dans le réglage d un servomoteur à rotation continue, objet de la section suivante 4. Piloter un servomoteur à rotation continue 4.1. Principe Un servomoteur à rotation continue est une évolution du servomoteur classique et son principe est similaire : déclaration des variables et envoi d un angle par l instruction myservo.write(angle). Par contre, la valeur de l angle a une grande importance sur le déplacement : elle permet de régler le sens et la vitesse de déplacement : /14

11 Il faut cependant relativiser : à pleine vitesse, le déplacement reste encore assez lent. Mais c est suffisant pour motoriser un petit robot autonome ou un actionneur. Pa exemple, pour collecter des balles de ping-pong qui sortent d un distributeur, on peut déclencher par l appui sur un bouton la rotation d un servomoteur muni d une palette qui les fera tomber une par une dans un bac 4.2. Application : pas à pas Montage Le montage est identique à celui du : il n y a pas de différence matérielle avec un servomoteur classique du point de vue du pilotage. L appui sur le bouton doit déclencher la rotation continue du servomoteur vers la droite, à pleine vitesse, et un relâchement du bouton doit entraîner son arrêt Codage 1. Rechercher la valeur du point mort du servomoteur Il s agit de gagner un peu de temps en recherchant la vraie valeur du point mort du servomoteur. En effet, les contraintes de fabrication et surtout de coût font que ce point mort ne situe que rarement à la valeur exacte de 90. Le servomoteur tourne alors qu il est supposé être à l arrêt, ce qui pose problème (c est même agaçant!). Deux solutions sont envisageables : 3) Rechercher la vraie valeur de point mort en observant son arrêt et en relevant la valeur de l angle correspondant ; 4) Ajuster la valeur de l angle par un décalage réglé par un potentiomètre. La première solution offre l avantage de tenir compte définitivement du décalage et de ne pas mobiliser un PIN de l Arduino pour le potentiomètre. Nous vous conseillons de noter la vraie valeur du point mort sur le servomoteur une fois trouvée. Le petit programme ci-dessous est dérivé du croquis «sweep» et permet de concrétiser : 11/14

12 12/14
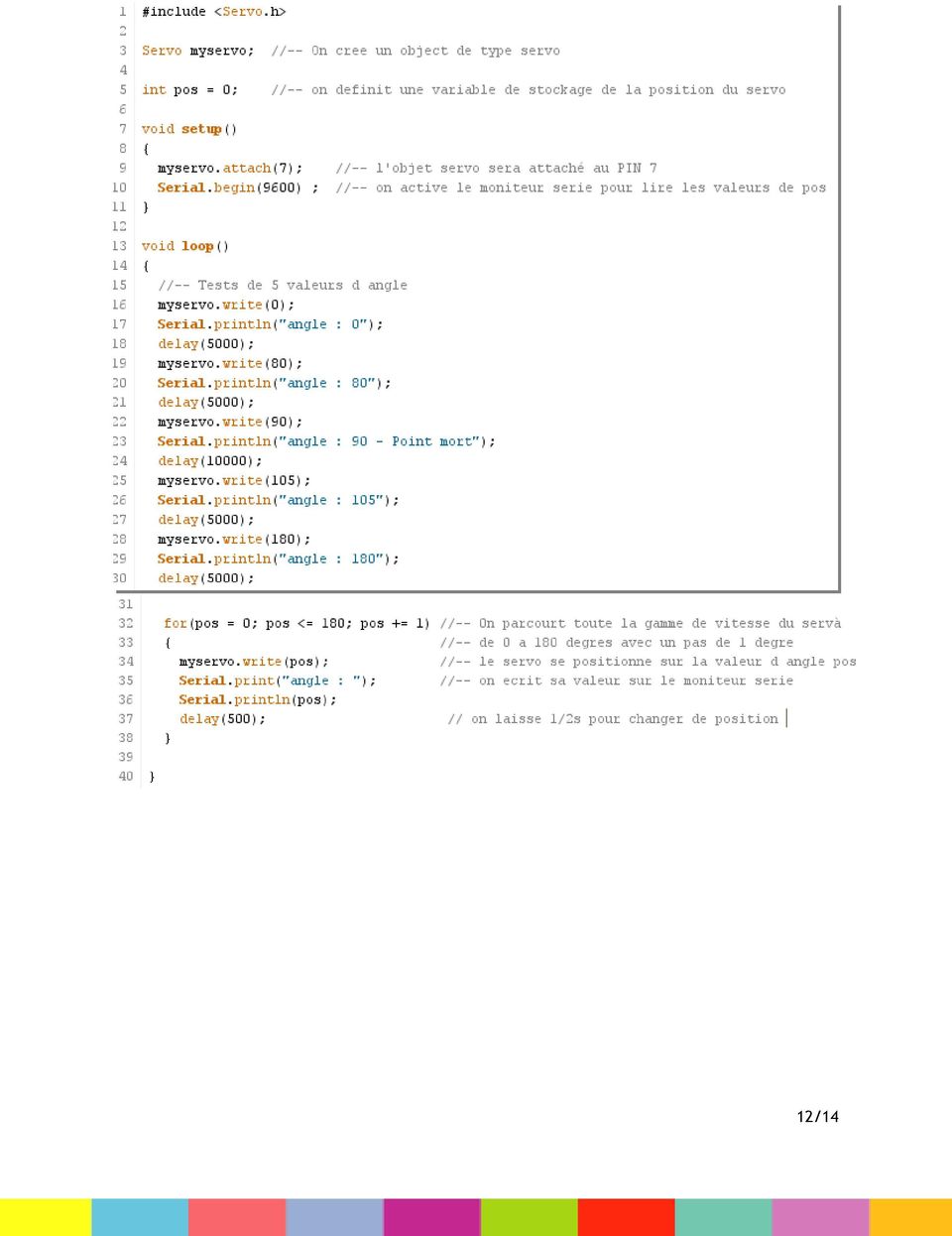
.")
13 Comme on peut le constater (au moins sur le servomoteur utilisé pour ce test, avec un angle de 90 réputé être le point mort, il tourne encore En observant la valeur qui correspond à l arrêt complet du servomoteur, on peut donc en déduire la vraie valeur du point mort, soit 92 La valeur du point mort sera stockée dans une constante (une variable qui ne varie pas!). Comme le servomoteur de collecte sera baptisé SCOLLECTE dans notre code, nous appellerons cette variable myscollecte_repos et nous la déclarerons de la manière suivante : int myscollecte_repos = 92; Pour stopper le servomoteur, il suffira de lui envoyer cet angle par l instruction : myscollecte.write(myscollecte_repos); 2. Définir les variables, leur type et leur affecter une valeur De façon classique, les variables suivantes sont créées : La librairie servo.h L affectation du PIN 9 au bouton poussoir L affectation du PIN 7 au servomoteur La création d un objet servo La création de deux constantes : une pour le point mort et l autre pour la vitesse max à droite Une variable pour le bouton poussoir 3. Initialiser dans la fonction setup() Ces initialisations ne sont pas fastidieuses mais sécurisent le comportement du robot. Le PIN utilisé par le poussoir est déclaré en entrée et initialisé à HIGH par un pull-up Le servomoteur est attaché au PIN déclaré en constante Ce PIN est déclaré en sortie Le servomoteur est mis au point mort 13/14
; 2.")
14 4. Détecter l appui sur le bouton et déclencher la rotation Lors d un appui sur le poussoir, le PIN correspondant va passer à l état LOW puisqu il sera relié à la masse (GND). Il suffit de tester cette condition à chaque itération de la boucle, après avoir lu la valeur du poussoir soit Ensuite, soit la valeur est resté à HIGH, ce qui signifie que le poussoir n a pas été actionné, soit elle est passée à LOW, et dans ce cas le servomoteur doit se mettre à tourner. Donc : 5) On lit la valeur du poussoir 6) Si elle est passée à LOW, le servomoteur reçoit la valeur d angle qui permet sa rotation 7) Sinon, il reçoit la valeur du point mort 5. A-t-on vraiment besoin d un Arduino pour faire çà? Ces exemples sont très simples et seraient réalisés plus facilement avec un peu d électronique. On peut s interroger sur le nombre de variables à déclarer et la taille du code qui sont nécessaires pour faire tourner un seul servomoteur. Mais dans la plupart des applications robotiques, plusieurs servomoteurs et capteurs sont utilisés et l électronique se complique tout en restant dans une logique cablée. Un Arduino Uno peut piloter jusqu à 12 servomoteurs et sa programmation permet de gérer simplement des capteurs plus subtils que des boutons poussoirs. Encore qu il reste à dire sur la gestion des poussoirs et notamment sur la suppression de l effet rebond qui peut induire un comportement inattendu Une fiche est dédiée à ce sujet. 14/14
 On lit la valeur du poussoir 6) Si elle est passée à LOW, le servomoteur reçoit la valeur d angle qui permet sa rotation 7) Sinon, il reçoit la valeur du point mort 5.")
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Bien commencer avec un LaunchPad MSP430G et un Breadboard
 Bien commencer avec un LaunchPad MSP430G et un Breadboard Pierre-Yves Rochat Le LaunchPad et Energia Texas Instrument propose un environnement de développement très complet pour ses MSP430, appelé Code
Bien commencer avec un LaunchPad MSP430G et un Breadboard Pierre-Yves Rochat Le LaunchPad et Energia Texas Instrument propose un environnement de développement très complet pour ses MSP430, appelé Code
AUTOPORTE III Notice de pose
 AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
Projet Robot Centaure
 Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
fullprotect inside EOLE SPEie RS E-SPEie 0.5-12-5V-0.6A-RS 1.0 revision Protection environnement Datasheet édition française
 Protection environnement Datasheet édition française 1.0 revision R-D-CO-D-27112011-1.0-C fullprotect inside SPEi Protection environnement interne SPEe Protection environnement externe SPEc Contrôle de
Protection environnement Datasheet édition française 1.0 revision R-D-CO-D-27112011-1.0-C fullprotect inside SPEi Protection environnement interne SPEe Protection environnement externe SPEc Contrôle de
Solar Scintillation Monitor Manuel utilisateur
 1 Solar Scintillation Monitor Manuel utilisateur Remerciements à M. Edward Joseph Seykora pour son autorisation à utiliser son design original et ses vifs encouragements, et à Jean Pierre Brahic et Christian
1 Solar Scintillation Monitor Manuel utilisateur Remerciements à M. Edward Joseph Seykora pour son autorisation à utiliser son design original et ses vifs encouragements, et à Jean Pierre Brahic et Christian
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Logiciel PICAXE Programming Editor
 Logiciel PICAXE Programming Editor Notice réduite 1. Lancer le logiciel PICAXE Programming Editor (Vidéo : «Lancer le programme»). 2. Dessiner un diagramme (Vidéos : «Nouveau programme» et «Dessiner le
Logiciel PICAXE Programming Editor Notice réduite 1. Lancer le logiciel PICAXE Programming Editor (Vidéo : «Lancer le programme»). 2. Dessiner un diagramme (Vidéos : «Nouveau programme» et «Dessiner le
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Centrale d alarme DA996
 Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview.
 ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview. Sciences et Technologies de l Industrie et du Développement Durable Formation des enseignants parcours : ET24 Modèle de
ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview. Sciences et Technologies de l Industrie et du Développement Durable Formation des enseignants parcours : ET24 Modèle de
SYSTÈMES DE COMMANDE. The Art of Mobility
 F SYSTÈMES DE COMMANDE The Art of Mobility The Art of Mobility Tous les problèmes sont faits pour être résolus. Telle est la pensée à la base de notre système de commande MagicDrive+. Quel que soit le
F SYSTÈMES DE COMMANDE The Art of Mobility The Art of Mobility Tous les problèmes sont faits pour être résolus. Telle est la pensée à la base de notre système de commande MagicDrive+. Quel que soit le
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Une carte pour vos projets
 ARDUINO Une carte pour vos projets CHRISTOPHE ULTRÉ [1] Les projets interdisciplinaires impliquent de faire l acquisition d un matériel adaptable et peu coûteux qui réponde à des problématiques communes,
ARDUINO Une carte pour vos projets CHRISTOPHE ULTRÉ [1] Les projets interdisciplinaires impliquent de faire l acquisition d un matériel adaptable et peu coûteux qui réponde à des problématiques communes,
SYSTÈME DE CONTRÔLE SOLAIRE LX-220 Installation et mode d emploi
 SYSTÈME DE CONTRÔLE SOLAIRE LX-220 Installation et mode d emploi IMPORTANTES CONSIGNES DE SÉCURITÉ LISEZ ET OBSERVEZ TOUTES LES CONSIGNES CONSERVEZ CES CONSIGNES EN LIEU SÛR AVERTISSEMENT Avant d installer
SYSTÈME DE CONTRÔLE SOLAIRE LX-220 Installation et mode d emploi IMPORTANTES CONSIGNES DE SÉCURITÉ LISEZ ET OBSERVEZ TOUTES LES CONSIGNES CONSERVEZ CES CONSIGNES EN LIEU SÛR AVERTISSEMENT Avant d installer
COMMUNICATION ENTRE DEUX ORDINATEURS PAR LASER MODULE EN CODE MORSE OU BINAIRE.
 COMMUNICATION ENTRE DEUX ORDINATEURS PAR LASER MODULE EN CODE MORSE OU BINAIRE. RESUME le fichier exécutable «morsebinaire_win_orphygts II_v2.exe», est un logiciel de démonstration permettant de faire
COMMUNICATION ENTRE DEUX ORDINATEURS PAR LASER MODULE EN CODE MORSE OU BINAIRE. RESUME le fichier exécutable «morsebinaire_win_orphygts II_v2.exe», est un logiciel de démonstration permettant de faire
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
Initiation à LabView : Les exemples d applications :
 Initiation à LabView : Les exemples d applications : c) Type de variables : Créer un programme : Exemple 1 : Calcul de c= 2(a+b)(a-3b) ou a, b et c seront des réels. «Exemple1» nom du programme : «Exemple
Initiation à LabView : Les exemples d applications : c) Type de variables : Créer un programme : Exemple 1 : Calcul de c= 2(a+b)(a-3b) ou a, b et c seront des réels. «Exemple1» nom du programme : «Exemple
LE SYSTÈME D'ALARME DE GSM
 LE SYSTÈME D'ALARME DE GSM Modèle: G11 UTILISATEUR MANUEL 1. Instruction Ce système d alarme possède une sirène d alarme pour avertir votre voisinage, et utilise le réseau GSM pour alerter les personnes
LE SYSTÈME D'ALARME DE GSM Modèle: G11 UTILISATEUR MANUEL 1. Instruction Ce système d alarme possède une sirène d alarme pour avertir votre voisinage, et utilise le réseau GSM pour alerter les personnes
NOTICE GPSTA1 I. DESCRIPTION II. ACCESSOIRES. J. R International - Eclats Antivols. 2014
 I. DESCRIPTION NOTICE GPSTA1 1 : Connecteur antenne GSM 2 : Emplacement carte SIM 3 : Bouton pour faire sortir l emplacement carte SIM 4 : Connecteur jack pour micro 5 : Connecteur antenne GPS 6 : Connecteur
I. DESCRIPTION NOTICE GPSTA1 1 : Connecteur antenne GSM 2 : Emplacement carte SIM 3 : Bouton pour faire sortir l emplacement carte SIM 4 : Connecteur jack pour micro 5 : Connecteur antenne GPS 6 : Connecteur
PIC EVAL Dev Board PIC18F97J60
 PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
MANUEL D UTILISATION EASY 12
 MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
ROTOLINE NOTICE DE POSE
 ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
ScoopFone. www.aeta-audio.com. Prise en main rapide
 ScoopFone www.aeta-audio.com Prise en main rapide Les spécifications peuvent changer sans préavis 55 000 081-F 2015 Face avant et contrôles 4 6 9 10 12 13 14 1 2 3 20 21 5 7 8 1. Niveau de contrôle: Ce
ScoopFone www.aeta-audio.com Prise en main rapide Les spécifications peuvent changer sans préavis 55 000 081-F 2015 Face avant et contrôles 4 6 9 10 12 13 14 1 2 3 20 21 5 7 8 1. Niveau de contrôle: Ce
Glossaire technique Veditec
 Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Indicateur d accélération numérique. Mode d emploi
 Indicateur d accélération numérique Mode d emploi Table des matières Page 3... Page 4... Page 5... Page 6... INDY-CATOR-G Contenu de l emballage Montage de l indicateur Programmation/Mise en service 2
Indicateur d accélération numérique Mode d emploi Table des matières Page 3... Page 4... Page 5... Page 6... INDY-CATOR-G Contenu de l emballage Montage de l indicateur Programmation/Mise en service 2
IV- Comment fonctionne un ordinateur?
 1 IV- Comment fonctionne un ordinateur? L ordinateur est une alliance du hardware (le matériel) et du software (les logiciels). Jusqu à présent, nous avons surtout vu l aspect «matériel», avec les interactions
1 IV- Comment fonctionne un ordinateur? L ordinateur est une alliance du hardware (le matériel) et du software (les logiciels). Jusqu à présent, nous avons surtout vu l aspect «matériel», avec les interactions
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Guide utilisateur. Parrot MKi9100. Français. Parrot MKi9100 Guide utilisateur 1
 Guide utilisateur Parrot MKi9100 Français Parrot MKi9100 Guide utilisateur 1 Sommaire Sommaire... 2 Introduction... 4 Installer le Parrot MKi9100... 5 Autoradio avec connecteur ISO...5 Autoradio avec entrées
Guide utilisateur Parrot MKi9100 Français Parrot MKi9100 Guide utilisateur 1 Sommaire Sommaire... 2 Introduction... 4 Installer le Parrot MKi9100... 5 Autoradio avec connecteur ISO...5 Autoradio avec entrées
AP70/AP80 Guide rapide
 AP70/AP80 Guide rapide FR La face avant 1 2 3 MENU 8 10 STBY AUTO NAV WORK 9 11 4 5 6 TURN 7 12 ALARM 13 ALARM No. Description 1 /Propulseur. Appuyer une fois pour prendre la commande. Appuyer et maintenir
AP70/AP80 Guide rapide FR La face avant 1 2 3 MENU 8 10 STBY AUTO NAV WORK 9 11 4 5 6 TURN 7 12 ALARM 13 ALARM No. Description 1 /Propulseur. Appuyer une fois pour prendre la commande. Appuyer et maintenir
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
MODE D EMPLOI Boitier de programmation SKY300046-01
 MODE D EMPLOI Boitier de programmation SKY300046-01 INTRODUCTION Merci d avoir fait l acquisition du Boitier de programmation SkyRc (SKY300046-01). Veuillez lire complètement et attentivement ce manuel
MODE D EMPLOI Boitier de programmation SKY300046-01 INTRODUCTION Merci d avoir fait l acquisition du Boitier de programmation SkyRc (SKY300046-01). Veuillez lire complètement et attentivement ce manuel
Enregistreur de Température pour PC DALLAS 1820
 Conrad sur INTERNET www.conrad.fr * Capteur à visser, M10, 5 m de câble DS 1820-HD-5M Capteur à visser, M10, longueur spéciale DS 1820-HD-SL Capteur à visser, G1/8, 2m de câble DS 1820-G18-2M Capteur à
Conrad sur INTERNET www.conrad.fr * Capteur à visser, M10, 5 m de câble DS 1820-HD-5M Capteur à visser, M10, longueur spéciale DS 1820-HD-SL Capteur à visser, G1/8, 2m de câble DS 1820-G18-2M Capteur à
Votre partenaire de la fermeture :
 Votre partenaire de la fermeture : Kit Facil 24 v (REF : DO IT FCH) KIT E 24 V I Bornier alimentation : II Bornier Moteurs : (il est indispensable d avoir des butées en ouverture et fermeture) Alimentation
Votre partenaire de la fermeture : Kit Facil 24 v (REF : DO IT FCH) KIT E 24 V I Bornier alimentation : II Bornier Moteurs : (il est indispensable d avoir des butées en ouverture et fermeture) Alimentation
CENTRALE D ALARME SANS FILS
 CENTRALE D ALARME SANS FILS Cher client, Nous vous remercions d avoir fait l acquisition de notre appareil, avant de commencer son installation veuillez lire le mode d emploi joint et prenez note de ce
CENTRALE D ALARME SANS FILS Cher client, Nous vous remercions d avoir fait l acquisition de notre appareil, avant de commencer son installation veuillez lire le mode d emploi joint et prenez note de ce
A. CARACTERISTIQUES TECHNIQUES.
 Page : 2 A. CARACTERISTIQUES TECHNIQUES. A.1. VUE D ENSEMBLE A.2. PRINCIPE DE FONCTIONNEMENT!" #! $! %&' ( ) * µ +, µ $# (& % ± -. /01)0$ ' &%(% 2 3,)/4 $ A.3. CARACTERISTIQUES MECANIQUES. PARAMETRES Valeur
Page : 2 A. CARACTERISTIQUES TECHNIQUES. A.1. VUE D ENSEMBLE A.2. PRINCIPE DE FONCTIONNEMENT!" #! $! %&' ( ) * µ +, µ $# (& % ± -. /01)0$ ' &%(% 2 3,)/4 $ A.3. CARACTERISTIQUES MECANIQUES. PARAMETRES Valeur
MT-703. Surveillance de niveau par sonde résistive TELEMETRIE PAR MODULE GSM CONFIGURATION ET UTILISATION
 TELEMETRIE PAR MODULE GSM CONFIGURATION ET UTILISATION Surveillance de niveau par sonde résistive MT-703 LOREME 12, rue des Potiers d'etain Actipole BORNY - B.P. 35014-57071 METZ CEDEX 3 Téléphone 03.87.76.32.51
TELEMETRIE PAR MODULE GSM CONFIGURATION ET UTILISATION Surveillance de niveau par sonde résistive MT-703 LOREME 12, rue des Potiers d'etain Actipole BORNY - B.P. 35014-57071 METZ CEDEX 3 Téléphone 03.87.76.32.51
Associations Dossiers pratiques
 Associations Dossiers pratiques Optimisez la gestion financière de votre association (Dossier réalisé par Laurent Simo, In Extenso Rhône Alpes) Les associations vivent et se développent dans un contexte
Associations Dossiers pratiques Optimisez la gestion financière de votre association (Dossier réalisé par Laurent Simo, In Extenso Rhône Alpes) Les associations vivent et se développent dans un contexte
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
FRANCAIS DGM1. Centrale Vigik 1 porte. N d homologation : - PS-200306-01 - MS-200306-02. Gamme: Vigik MANUEL D INSTALLATION.
 ANCAIS N d homologation : - PS-200306-01 - MS-200306-02 Gamme: Vigik MANUEL D INSTALLATION Group Products 1] PRESENTATION DU PRODUIT Conforme Mifare - ISO 14443A (système ouvert à toutes les marques de
ANCAIS N d homologation : - PS-200306-01 - MS-200306-02 Gamme: Vigik MANUEL D INSTALLATION Group Products 1] PRESENTATION DU PRODUIT Conforme Mifare - ISO 14443A (système ouvert à toutes les marques de
SECURIT GSM Version 2
 EOLE informatique SECURIT GSM Version 2 Notice d installation & Guide utilisateur Eole informatique 42 rue Claude Decaen -75012 Paris Tél. 01.43.43.00.97 www.eole-informatique.com 15/03/2006 SOMMAIRE Notice
EOLE informatique SECURIT GSM Version 2 Notice d installation & Guide utilisateur Eole informatique 42 rue Claude Decaen -75012 Paris Tél. 01.43.43.00.97 www.eole-informatique.com 15/03/2006 SOMMAIRE Notice
Démarreur-testeur par ordinateur via le port USB d un PC pour moteurs asynchrones triphasés
 Démarreur-testeur par ordinateur via le port USB d un PC pour moteurs asynchrones triphasés J. MBIHI Email : [email protected] E. AMIE EBANDA et A. DONWOUNG KANA Groupe de Recherche en Informatique Industrielle
Démarreur-testeur par ordinateur via le port USB d un PC pour moteurs asynchrones triphasés J. MBIHI Email : [email protected] E. AMIE EBANDA et A. DONWOUNG KANA Groupe de Recherche en Informatique Industrielle
MultiPlayer Lecteur Audio et vidéo MODE D'EMPLOI
 MultiPlayer Lecteur Audio et vidéo MODE D'EMPLOI SOMMAIRE A - Consignes de sécurité... P1 B - Informations produit... P3 1 - Présentation... P4 2 - Fonctionnalités... P4 3 - Installation... P5 4 - Mode
MultiPlayer Lecteur Audio et vidéo MODE D'EMPLOI SOMMAIRE A - Consignes de sécurité... P1 B - Informations produit... P3 1 - Présentation... P4 2 - Fonctionnalités... P4 3 - Installation... P5 4 - Mode
KM2 W1 EVC1 M3~ Manuel AUTOMSIM API 24V. BP Dcy 1MINI 1MAXI. www.irai.com
 L1 L2 L3 F1 M1 KM2 0V U1 V1 M3~ W1 EVC1 Manuel AUTOMSIM 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 API 24V 0 1 2 C1MINI BP Dcy C1MAXI 1MAXI 1MINI EVC1 www.irai.com INTRODUCTION... 5 INSTALLATION... 6 PRISE EN
L1 L2 L3 F1 M1 KM2 0V U1 V1 M3~ W1 EVC1 Manuel AUTOMSIM 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 API 24V 0 1 2 C1MINI BP Dcy C1MAXI 1MAXI 1MINI EVC1 www.irai.com INTRODUCTION... 5 INSTALLATION... 6 PRISE EN
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
F210. Automate de vision hautes fonctionnalités. Caractèristiques. Algorithmes vectoriels
 Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Atelier Arduino. Initiation à la mise en oeuvre matérielle et logicielle de l Arduino. novembre 2006
 Atelier Arduino Initiation à la mise en oeuvre matérielle et logicielle de l Arduino novembre 2006 Centre de Ressources Art Sensitif http://www.craslab.org http://www.artsens.org Livret Arduino en français
Atelier Arduino Initiation à la mise en oeuvre matérielle et logicielle de l Arduino novembre 2006 Centre de Ressources Art Sensitif http://www.craslab.org http://www.artsens.org Livret Arduino en français
NOTICE D UTILISATION FACILE
 NS-555100-FACILE-1312 NOTICE D UTILISATION FACILE 1 Sommaire Recommandations de sécurité... 3 Composition du kit... 4 Description du système...6 et 7 Branchement de la caméra...8 et 9 Chapître 1 : Utilisation
NS-555100-FACILE-1312 NOTICE D UTILISATION FACILE 1 Sommaire Recommandations de sécurité... 3 Composition du kit... 4 Description du système...6 et 7 Branchement de la caméra...8 et 9 Chapître 1 : Utilisation
DOCUMENT RESSOURCE SONDES PRESENTATION
 Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
BD 302 MINI. Etage de puissance pas à pas en mode bipolaire. Manuel 2059-A003 F
 BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F phytron BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F Manuel BD 302 MINI 2002 Tous droits
BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F phytron BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F Manuel BD 302 MINI 2002 Tous droits
TERMINAL D AUDIO CONFERENCE ANALOGIQUE USB VOIP NOTICE
 TERMINAL D AUDIO CONFERENCE ANALOGIQUE USB VOIP 284490 NOTICE Sommaire 1 Caractéristiques...1 2 Spécifications...2 3 Description...2 4 Installation...3 5 Fonctionnement...5 6 Dépannage...8 1 Fonctions
TERMINAL D AUDIO CONFERENCE ANALOGIQUE USB VOIP 284490 NOTICE Sommaire 1 Caractéristiques...1 2 Spécifications...2 3 Description...2 4 Installation...3 5 Fonctionnement...5 6 Dépannage...8 1 Fonctions
Nouveautés ligne EROUND
 Nouveautés ligne EROUND Blocs de contact individuels auto-surveillés Caractéristiques principales Bloc de contact auto-surveillé. Signale la séparation du dispositif par l ouverture du circuit électrique.
Nouveautés ligne EROUND Blocs de contact individuels auto-surveillés Caractéristiques principales Bloc de contact auto-surveillé. Signale la séparation du dispositif par l ouverture du circuit électrique.
BROSSE DE DÉSHERBAGE GAUCHE/DROITE
 BROSSE DE DÉSHERBAGE GAUCHE/DROITE GÉNÉRALITÉS La brosse est montée sur une plaque de montage DIN [brosse latérale], elle est équipée (d origine) avec des béquilles et peut être montée et démontée par
BROSSE DE DÉSHERBAGE GAUCHE/DROITE GÉNÉRALITÉS La brosse est montée sur une plaque de montage DIN [brosse latérale], elle est équipée (d origine) avec des béquilles et peut être montée et démontée par
1 Introduction C+ + Algorithm e. languag. Algorigramm. machine binaire. 1-1 Chaîne de développement. Séance n 4
 1 Introduction 1-1 Chaîne de développement Algorithm e C+ + Algorigramm e languag e machine binaire Le programme est écrit à l aide de Multiprog sous forme d algorigramme puis introduit dans le microcontrôleur
1 Introduction 1-1 Chaîne de développement Algorithm e C+ + Algorigramm e languag e machine binaire Le programme est écrit à l aide de Multiprog sous forme d algorigramme puis introduit dans le microcontrôleur
Installation kit NTS 820-F 1987009E9NN
 Installation kit NTS 820-F 1987009E9NN Nussbaum France Central 2, 460 Clos de la courtine 93160 Noisy le grand 01 78 78 72 00 www.nussbaum-france.com Préalable : Cette notice va vous aidez pour la modification
Installation kit NTS 820-F 1987009E9NN Nussbaum France Central 2, 460 Clos de la courtine 93160 Noisy le grand 01 78 78 72 00 www.nussbaum-france.com Préalable : Cette notice va vous aidez pour la modification
Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03
 Appareil de contrôle de niveau NK312 24V Manuel d utilisation Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03 Seite 1 Manuel d utilisation
Appareil de contrôle de niveau NK312 24V Manuel d utilisation Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03 Seite 1 Manuel d utilisation
EL70x1 en mode position. Mise en œuvre rapide. VERSION : Beta / DATE : 31 Juillet 2011
 - EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
- EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
VS2000V+CAPNO. Moniteur de paramètres vitaux À usage vétérinaire. Manuel d utilisation
 VS2000V+CAPNO Moniteur de paramètres vitaux À usage vétérinaire Manuel d utilisation Sommaire Information et garantie... Propriété de la notice... Limite de garantie... Rejet des garanties... Conditions
VS2000V+CAPNO Moniteur de paramètres vitaux À usage vétérinaire Manuel d utilisation Sommaire Information et garantie... Propriété de la notice... Limite de garantie... Rejet des garanties... Conditions
STATISTIQUES A DEUX VARIABLES
 Evaluation de Mathématiques Bac Pro Date : STATISTIQUES A DEUX VARIABLES Liste des capacités, connaissances et attitudes évaluées Capacités Connaissances Attitudes Evaluation A l aide des TIC, représenter
Evaluation de Mathématiques Bac Pro Date : STATISTIQUES A DEUX VARIABLES Liste des capacités, connaissances et attitudes évaluées Capacités Connaissances Attitudes Evaluation A l aide des TIC, représenter
Manuel d'installation, d'utilisation et de maintenance
 Simplicity & Comfort* Manuel d'installation, d'utilisation et de maintenance Ce manuel fait partie intégrante du kit et ne doit jamais être séparé de celui-ci F interphone vidéo à encastrer 2 fils platine
Simplicity & Comfort* Manuel d'installation, d'utilisation et de maintenance Ce manuel fait partie intégrante du kit et ne doit jamais être séparé de celui-ci F interphone vidéo à encastrer 2 fils platine
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Système de surveillance vidéo
 Conrad sur INTERNET www.conrad.fr N O T I C E Version 12/01 Entretien Pour un fonctionnement correct de votre système de surveillance vidéo, prenez note des conseils suivants : 1/ Tenez la caméra et le
Conrad sur INTERNET www.conrad.fr N O T I C E Version 12/01 Entretien Pour un fonctionnement correct de votre système de surveillance vidéo, prenez note des conseils suivants : 1/ Tenez la caméra et le
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988)
") Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988) Le système d alerte centralisée de la 928 est destiné a présenter au conducteur toute anomalie de fonctionnement
Petit guide pratique de dépannage du système d alerte centralisée (modèles de 1980 à 1988) Le système d alerte centralisée de la 928 est destiné a présenter au conducteur toute anomalie de fonctionnement
Atelier Arduino. Initiation à la mise en oeuvre matérielle et logicielle de l Arduino. novembre 2006
 Atelier Arduino Initiation à la mise en oeuvre matérielle et logicielle de l Arduino novembre 2006 Centre de Ressources Art Sensitif http://www.craslab.org http://www.artsens.org Livret Arduino en français
Atelier Arduino Initiation à la mise en oeuvre matérielle et logicielle de l Arduino novembre 2006 Centre de Ressources Art Sensitif http://www.craslab.org http://www.artsens.org Livret Arduino en français
Fiche technique CPU 314SC/DPM (314-6CG13)
") Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
14.01 14.71. 6 fonctions 1 NO Montage sur rail 35 mm (EN 60715) 16/30 (120 A - 5 ms) 16/30 (120 A - 5 ms) Tension nom./tension max.
 16/30 (120 A - 5 ms) 16/30 (120 A - 5 ms) Tension nom./tension max.") Série 14 - Minuteries cage d escalier 16 A SERE 14 Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis
Série 14 - Minuteries cage d escalier 16 A SERE 14 Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis
SOMMAIRE. ENREGISTREMENT...24 Programmer un enregistrement...24 Enregistrement manuel...25 Timeshift...25 Regarder un programme enregistré...
 SOMMAIRE PRECAUTIONS D USAGE...20 TELECOMMANDE...21 MENU PRINCIPAL...23 TV...23 Regarder la TNT...23 Balayage des chaînes...23 Classement des chaînes...24 EPG (guide électronique des programmes)...24 ENREGISTREMENT...24
SOMMAIRE PRECAUTIONS D USAGE...20 TELECOMMANDE...21 MENU PRINCIPAL...23 TV...23 Regarder la TNT...23 Balayage des chaînes...23 Classement des chaînes...24 EPG (guide électronique des programmes)...24 ENREGISTREMENT...24
Hubert & Bruno Lundi 12 octobre 2009 SAINT-QUENTIN (02)
") Hubert & Bruno Lundi 12 octobre 2009 SAINT-QUENTIN (02) Ne rien livrer au hasard, c est économiser du travail Pont Sainte Maxence(O C est quoi USB? Comment ça marche? Les standards? La technique en détail
Hubert & Bruno Lundi 12 octobre 2009 SAINT-QUENTIN (02) Ne rien livrer au hasard, c est économiser du travail Pont Sainte Maxence(O C est quoi USB? Comment ça marche? Les standards? La technique en détail
JUPITER /20/27/61m. Contact NF, 50mA à 24v max. avec R50 Ohms en série
 JUPITER /20/27/61m 1 ) - SPECIFICATIONS TECHNIQUES Tension 12v nominal (8,5 à 16 v dc) Courant 25 ma max à 12vdc Ondulation 2v c/c à 12vdc Sortie alarme Contact NF, 50mA à 24v max. avec R50 Ohms en série
JUPITER /20/27/61m 1 ) - SPECIFICATIONS TECHNIQUES Tension 12v nominal (8,5 à 16 v dc) Courant 25 ma max à 12vdc Ondulation 2v c/c à 12vdc Sortie alarme Contact NF, 50mA à 24v max. avec R50 Ohms en série
Module de mesure de courant pour relais statiques serie HD Module de mesure de courant HD D0340I
 Plage de tension de commande: 4... 30 VDC Plage de courant de charge: 2 A... 40 A Controle permanent de courant Apprentissage du courant de consigne par bouton poussoir ou par entrée externe Seuil d'alarme
Plage de tension de commande: 4... 30 VDC Plage de courant de charge: 2 A... 40 A Controle permanent de courant Apprentissage du courant de consigne par bouton poussoir ou par entrée externe Seuil d'alarme
COMMANDER A DISTANCE LE ROBOT-PONG ETUDE DE LA TELECOMMANDE (2 nde PARTIE)
") SIN STI2D - Système d'information et Numérique TD TP Cours Synthèse Devoir Evaluation Projet Document ressource COMMANDER A DISTANCE LE ROBOT-PONG ETUDE DE LA TELECOMMANDE (2 nde PARTIE) 1 GESTION DES
SIN STI2D - Système d'information et Numérique TD TP Cours Synthèse Devoir Evaluation Projet Document ressource COMMANDER A DISTANCE LE ROBOT-PONG ETUDE DE LA TELECOMMANDE (2 nde PARTIE) 1 GESTION DES
TP Vidéo surveillance Bac pro SEN CCTV. Lycée de L Aa 1
 CCTV Lycée de L Aa 1 Mise en situation Le Lycée de l Aa contact la société SENINSTAL, faisant suite à une appel d offre pour effectuer l installation d un système de vidéo surveillance dans une de ses
CCTV Lycée de L Aa 1 Mise en situation Le Lycée de l Aa contact la société SENINSTAL, faisant suite à une appel d offre pour effectuer l installation d un système de vidéo surveillance dans une de ses
Manuel d installation du clavier S5
 1 Manuel d installation du clavier S5 Table des matières 1. Contenu de l emballage... 3 2. Guide de programmation... 3 3. Description... 4 4. Caractéristiques techniques du clavier S5... 4 5. Spécifications
1 Manuel d installation du clavier S5 Table des matières 1. Contenu de l emballage... 3 2. Guide de programmation... 3 3. Description... 4 4. Caractéristiques techniques du clavier S5... 4 5. Spécifications
Guide d Utilisation :
 Guide d Utilisation : Fauteuil élévateur pour escalier droit E120 / D160 SOMMAIRE Ce monte escalier est conçu pour être utilisé par une personne seulement lors des déplacements. Une mauvaise utilisation
Guide d Utilisation : Fauteuil élévateur pour escalier droit E120 / D160 SOMMAIRE Ce monte escalier est conçu pour être utilisé par une personne seulement lors des déplacements. Une mauvaise utilisation
Version 16 Octobre 2010 Fiche n 8-1 : Plan de Feu : notices Word et Open Office
 Cette Fiche n 8-1 est le mode d emploi des fiches n 8-2 : «Plan de feu de base Format A4» éditées en format.doc pour ceux qui ont «Word» et en format.odt pour ceux qui ont «Open Office». Lorsque vous cliquez
Cette Fiche n 8-1 est le mode d emploi des fiches n 8-2 : «Plan de feu de base Format A4» éditées en format.doc pour ceux qui ont «Word» et en format.odt pour ceux qui ont «Open Office». Lorsque vous cliquez
LCD COLOR MONITOR (English French Translation)
") LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
LCD COLOR MONITOR (English French Translation) Front page : -1 Manuel d Utilisation -2 Système Vidéo Couleur LCD Table of contents : Table des Matières 1. Précautions 2. Accessoires 3. Fonctions 4. Télécommande
BROSSE DE DESHERBAGE
 BROSSE DE DESHERBAGE Montage sur plaque de base à l avant d une balayeuse aspiratrice (Réception DRIEE en genre VASP/VOIRIE) Pour éliminer les mauvaises herbes, algues et mousses sur la voirie et les espaces
BROSSE DE DESHERBAGE Montage sur plaque de base à l avant d une balayeuse aspiratrice (Réception DRIEE en genre VASP/VOIRIE) Pour éliminer les mauvaises herbes, algues et mousses sur la voirie et les espaces
Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE
 Modem ADSL Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE Port ADSL / ADSL2+ ANSI T1 413 / ITU G.992.1, G.992.3, G.992.5 Annex A (10) 5 ports ethernet 10 / 100 Base-T (9, 2 à 5) 1 ports USB host
Modem ADSL Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE Port ADSL / ADSL2+ ANSI T1 413 / ITU G.992.1, G.992.3, G.992.5 Annex A (10) 5 ports ethernet 10 / 100 Base-T (9, 2 à 5) 1 ports USB host
Guide de montage du PRisme. version 1.2.2
 Guide de montage du PRisme version 1.2.2 Sommaire Introduction... 4 Contenu du kit... 4 Travail à Robopoly... 8 Murphy-Poly... 8 L électricité statique... 8 Les machines-outils... 8 Convention de câblage...
Guide de montage du PRisme version 1.2.2 Sommaire Introduction... 4 Contenu du kit... 4 Travail à Robopoly... 8 Murphy-Poly... 8 L électricité statique... 8 Les machines-outils... 8 Convention de câblage...
C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. www.sensopart.com
 C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. 22 2 Déballer, paramétrer et démarrer : les capteurs de vision n ont jamais été aussi puissants pour une manipulation
C est prêt! VISOR. Le capteur de vision avec lequel vous pouvez commencer tout de suite. 22 2 Déballer, paramétrer et démarrer : les capteurs de vision n ont jamais été aussi puissants pour une manipulation
BAMOSONIC IT. - Mesure de niveau -
 - Mesure de niveau - Le capteur de niveau F est destiné à la mesure de niveau de liquide sur des cuves de forme cylindrique ou rectangulaire avec possibilité d'un affichage en niveau, distance, volume
- Mesure de niveau - Le capteur de niveau F est destiné à la mesure de niveau de liquide sur des cuves de forme cylindrique ou rectangulaire avec possibilité d'un affichage en niveau, distance, volume
Projet de synthèse de l'électronique analogique : réalisation d'une balance à jauges de contrainte
 J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
Manuel programmation QUESTOR
 QUESTOR Programmation et activation AS 271 et AS 270 Document: KSW3s527.0003 / fr 2010.08 Edition: Août 2010 QUESTOR TABLE DES MATIÉRES 1 Description du produit FR-4 1.1 Application.... FR-4 1.1.1 Logiciel
QUESTOR Programmation et activation AS 271 et AS 270 Document: KSW3s527.0003 / fr 2010.08 Edition: Août 2010 QUESTOR TABLE DES MATIÉRES 1 Description du produit FR-4 1.1 Application.... FR-4 1.1.1 Logiciel
NOTICE D UTILISATION
 GSM / SMS Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-sans-fil-gsm-f3/ pour accéder à la notice vidéo du kit d alarme NFO-480030-1307 NOTICE D UTILISATION
GSM / SMS Scannez ce QR code ou rendez vous à l adresse web : http://www.fujionkyo.fr/produit/ kit-alarme-sans-fil-gsm-f3/ pour accéder à la notice vidéo du kit d alarme NFO-480030-1307 NOTICE D UTILISATION
Virtual Universe aperçu numéro 1
 Virtual Universe aperçu numéro 1 Cet aperçu va vous permettre d observer quelques aspects et fonctionnalités du futur produit Virtual Universe. Cet aperçu est encapsulé dans un exécutable généré par AUTOMGEN8.
Virtual Universe aperçu numéro 1 Cet aperçu va vous permettre d observer quelques aspects et fonctionnalités du futur produit Virtual Universe. Cet aperçu est encapsulé dans un exécutable généré par AUTOMGEN8.
Notice de fonctionnement DVR H264. + Méthode de Visionnage ESEENET
 Notice de fonctionnement DVR H264 + Méthode de Visionnage ESEENET 1 Le point de départ de chacune des différentes configurations traitées ci-dessous sera l écran de visualisation des 4 ou 8 caméras. A
Notice de fonctionnement DVR H264 + Méthode de Visionnage ESEENET 1 Le point de départ de chacune des différentes configurations traitées ci-dessous sera l écran de visualisation des 4 ou 8 caméras. A
Manuel d aide à la pose
 Manuel d aide à la pose Téléphones d Urgence de la série DICTIS MICOME Téléphones d urgence Téléalarmes Pont de Peille 06340 Drap France Tel : (33) 4 93 91 16 17 Fax : (33) 4 93 91 26 27 e-mail : [email protected]
Manuel d aide à la pose Téléphones d Urgence de la série DICTIS MICOME Téléphones d urgence Téléalarmes Pont de Peille 06340 Drap France Tel : (33) 4 93 91 16 17 Fax : (33) 4 93 91 26 27 e-mail : [email protected]
Ordinateurs, Structure et Applications
 Ordinateurs, Structure et Applications Cours 19, Le USB Etienne Tremblay Université Laval, Hiver 2012 Cours 19, p.1 USB signifie Universal Serial Bus USB Le USB a été conçu afin de remplacer le port série
Ordinateurs, Structure et Applications Cours 19, Le USB Etienne Tremblay Université Laval, Hiver 2012 Cours 19, p.1 USB signifie Universal Serial Bus USB Le USB a été conçu afin de remplacer le port série
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
ALICEBOX. Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE. Découvrir ma télécommande 12 TÉLÉCOMMANDE. Accès au médiacenter
 Découvrir ma télécommande Activer/désactiver la connexion du décodeur au téléviseur Fin Enregistrement Play / Pause Revenir en arrière ou sortie Navigation Accès au médiacenter Allumer / Mettre en veille
Découvrir ma télécommande Activer/désactiver la connexion du décodeur au téléviseur Fin Enregistrement Play / Pause Revenir en arrière ou sortie Navigation Accès au médiacenter Allumer / Mettre en veille
CONTROLE D ACCES A TRANSPONDEUR LECTEUR DE BADGE SANS CONTACT ST
 CONTROLE D ACCES A TRANSPONDEUR LECTEUR DE BADGE SANS CONTACT ST 660 Référence : 9690 Ce système utilise la technique du transpondeur, c est à dire que les échanges de données entre le badge et le lecteur
CONTROLE D ACCES A TRANSPONDEUR LECTEUR DE BADGE SANS CONTACT ST 660 Référence : 9690 Ce système utilise la technique du transpondeur, c est à dire que les échanges de données entre le badge et le lecteur
Electron S.R.L. - MERLINO - MILAN ITALIE Tel (++ 39 02) 90659200 Fax 90659180 Web www.electron.it, e-mail [email protected]
 90659200 Fax 90659180 Web www.electron.it, e-mail electron@electron.it") Electron S.R.L. Design Production & Trading of Educational Equipment B3510--II APPLIICATIIONS DE TRANSDUCTEURS A ULTRASONS MANUEL D IINSTRUCTIIONS POUR L ETUDIIANT Electron S.R.L. - MERLINO - MILAN ITALIE
Electron S.R.L. Design Production & Trading of Educational Equipment B3510--II APPLIICATIIONS DE TRANSDUCTEURS A ULTRASONS MANUEL D IINSTRUCTIIONS POUR L ETUDIIANT Electron S.R.L. - MERLINO - MILAN ITALIE
Capteur mécanique universel HF 32/2/B
 Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
III Capteurs et actuateurs
 III Capteurs et actuateurs Tous les systèmes électroniques ont en commun qu ils fonctionnent selon le principe ETS (Entrée, Traitement, Sortie) du traitement de l information. ENTRÉE TRAITEMENT SORTIE
III Capteurs et actuateurs Tous les systèmes électroniques ont en commun qu ils fonctionnent selon le principe ETS (Entrée, Traitement, Sortie) du traitement de l information. ENTRÉE TRAITEMENT SORTIE
Entraînements personnalisés
 67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu