Linux embarqué Retour d expérience et temps réel. Denis Coupvent-Desgraviers
|
|
|
- Jeanne Charpentier
- il y a 10 ans
- Total affichages :
Transcription
1 Linux embarqué Retour d expérience et temps réel 1 Denis Coupvent-Desgraviers

2 Introduction Bien connaître les bases d un système d exploitation Utilisation de GNU/Linux Bonnes connaissances en langage C Partir sur ces bases pour concevoir un système embarqué (maquette logicielle) sur x86 Fort de cette expérience, application sur une architecture ARM Amélioration du projet avec l aide d un électronicien (temps réel?) 2

3 PLAN : 1 ère partie Système d exploitation Système d exploitation Historique des ordinateurs Définition Différents types Typologie Composition Organisation générale Système d exploitation Linux Linux? Les processus Les Threads La Mémoire Partagée Les Mutex Les Sémaphores L ordonnanceur Le multitâche Le temps partagé Le temps réel Conclusion Améliorer la réactivité d un système Rendre temps réel Linux 3

4 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion 4

5 Plan : 3 ème partie Temps réel Temps réel en général Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie 5

6 PLAN : 1 ère partie Système d exploitation Système d exploitation Historique des ordinateurs Définition Différents types Typologie Composition Organisation générale Système d exploitation Linux Linux? Les processus Les Threads La Mémoire Partagée Les Mutex Les Sémaphores L ordonnanceur Le multitâche Le temps partagé Le temps réel Conclusion Améliorer la réactivité d un système Rendre temps réel Linux 6

7 Historique des ordinateurs 7 Les systèmes d exploitations très liés à l architecture des ordinateurs 1ère génération ( ) : tubes à vide et tableaux d interrupteurs 2 ème génération ( ) : transistors et systèmes par lots 3 ème génération ( ) : apparition de la multiprogrammation (utilisation CPU optimisée) 4 ème génération (1980-aujourd hui) : apparition des puces LSI (Large Scale Integration) > ordinateur personnel
 4 ème génération (1980-aujourd hui) : apparition des puces LSI (Large Scale Integration) >")
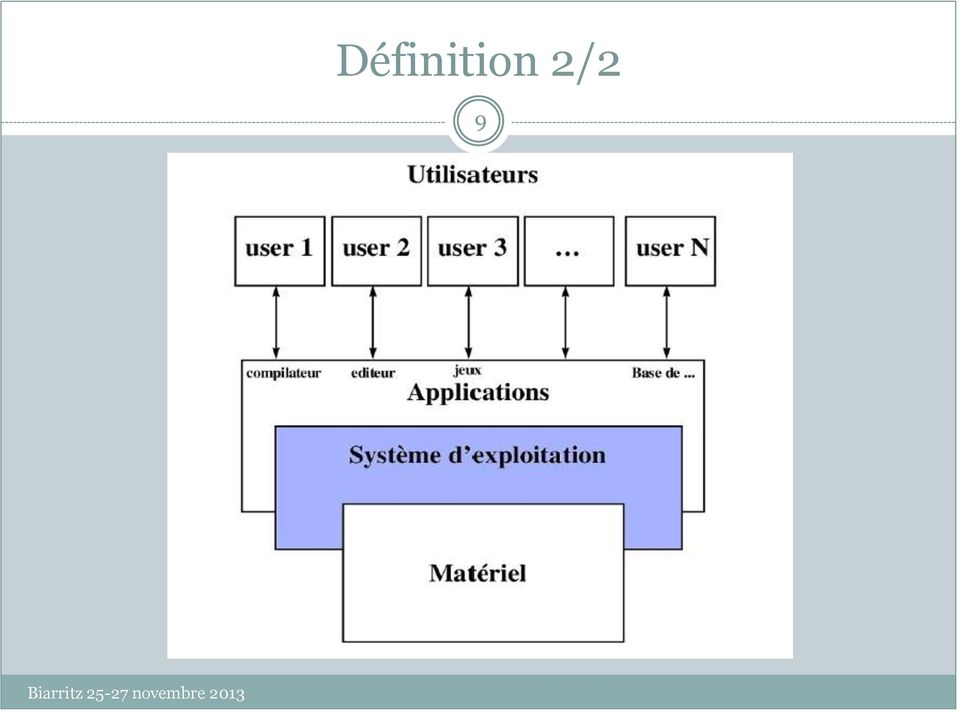
8 Définition 1/2 Le système d exploitation (ensemble de programmes) s intercale entre les logiciels et le matériel Rôle 1 : séparer les applications des spécificités et des limitations du matériel Rôle 2 : protéger le matériel des applications Rôle 3 : offrir une vue simple et cohérente au programmeur pour développer ses applications (API: Applications Programming Interface) Pour réaliser les objectifs précédents, le système d exploitation gère les processus (programmes) l ordonnanceur la mémoire le système de fichiers les entrées/sorties le réseau l interface graphique (accessoirement) 8
 l ordonnanceur la mémoire le système de fichiers les entrées/sorties le réseau l interface graphique")
9 Définition 2/2 9
10 Différents types 1/3 Il existe 9 types de systèmes d exploitations: Système pour mainframe Système pour serveurs Système pour multiprocesseurs Système personnels Système temps réel Système embarqué 10

11 Système pour mainframe Différents types 2/3 Grosse machine (ex: IBM Mainframe AS 400) Beaucoup de ressources avec 1 seul terminal (écran monochrome) Système pour serveur Beaucoup d utilisateurs Contrainte de forte disponibilité Système multiprocesseurs Plusieurs processeurs Gestion concurrente des ressources 11

12 Système personnels Interface conviviale Ressources basiques Système temps réel Différents types 3/3 Respect des contraintes temporelles Temps réel dur temps réel mou Système embarqué De plus en plus d interface IHM conviviales De plus en plus multiprogrammes!= systèmes enfouis Ressources matérielles limitées 12

13 Typologie 1/3 5 générations de système d'exploitation : 13 Traitement par lot (1950) Multiprogrammés (1960) Temps partagé (1970) Temps réel (1975) Distribués (1990)
 Temps réel (1975)")
14 Traitement par lot (1950) Typologie 2/3 Cartes perforées (instructions + données) -> lecture séquentielle + synchrone des données (Batch) Peu d intervention du seul opérateur Gros calculs, météo, statistiques, impôts... Multiprogrammés (multitâches) (1960) Optimise l utilisation du CPU 14 Première notion de scheduling (planification de l'utilisation du CPU cadencé par l usage des périphériques) Peu d intervention du seul opérateur
 Peu d intervention du seul")
15 Temps partagé (1970) Typologie 3/3 Plusieurs utilisateurs simultanés Plusieurs programmes exécutés en temps égaux Utilisation du swap Temps réel (1975) Temps partagé (tous les OS)!= temps réel (OS spécifiques ou adaptés) L information après acquisition et traitement reste encore pertinent Ressources logicielles et/ou matérielles réservées Distribués (1990) Les OS actuels sont préemptifs (!= coopératifs), multitâches, multiutilisateurs 15
 Les OS actuels sont préemptifs (!")
16 Composition 16 les processus (programmes) et leurs communications la mémoire l ordonnanceur le système de fichiers Le contrôle d accès Les utilitaires les entrées/sorties Le réseau L interface graphique (accessoirement)

17 Organisation générale 1/3 Un système d exploitation s organise en différentes couches Couche haute : API, utilitaires, fenêtres Couche moyenne : mémoire, système de fichiers, pilote, réseau, etc Couche basse : noyau Noyau : programme offrant une couche d abstraction au système d exploitation. Il s intercale entre le matériel et l ensemble des programmes qui forment la base minimale de l'os. Le noyau occupe un espace mémoire protégé. 17

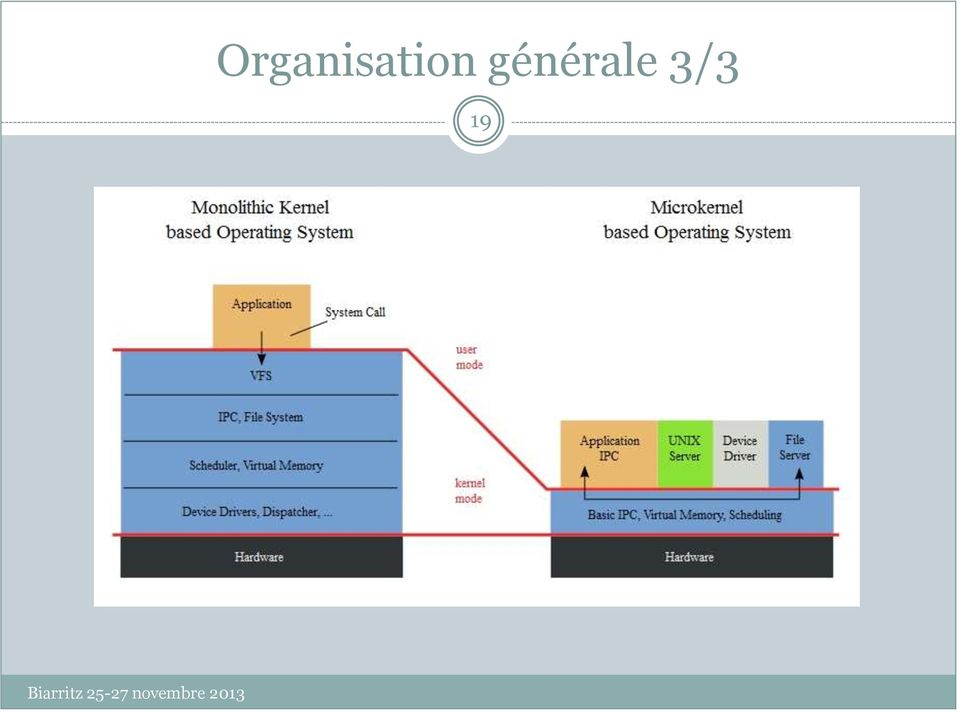
18 Organisation générale 2/3 Le noyau oriente l organisation générale du S.E. 18 Noyau monolithique: tout est dans le noyau (ex: famille Unix/Linux, FreeBSD) Micro-noyau : seulement le strict minimum : ordonnanceur+mémoire virtuelle (ex: Minix, Mac OS X) Noyau hybride (ex: Windows NT) Exo-noyau rien n'est protégé (ex: Mac OS, AmigaOS)
 Noyau hybride (ex: Windows NT) Exo-noyau rien n'est protégé (ex:")
19 Organisation générale 3/3 19
20 PLAN : 1 ère partie Système d exploitation Système d exploitation Historique des ordinateurs Définition Différents types Typologie Composition Organisation générale Système d exploitation Linux Linux? Les processus Les Threads La Mémoire Partagée Les Mutex Les Sémaphores L ordonnanceur Le multitâche Le temps partagé Le temps réel Conclusion Améliorer la réactivité d un système Rendre temps réel Linux 20

21 Linux? 1/4 Conçu par Linus Torvalds (étudiant finlandais) Linux <- dérivé de Minix <- dérivé de UNIX <- dérivé Multics Première version (0.01) annoncée sur le newsgroup comp.os.minix en septembre 1991 Seulement lignes de codes Aujourd hui : version > 15 millions lignes de codes! Accélération des sorties des versions (développement mobile) 21
22 Linux? 2/4 Erreurs fréquentes : Linux ne désigne que le noyau Linux est souvent associé aux outils GNU (fondateur: Richard Stallman) d où le nom de GNU/Linux (GNU : Gnu s Not Unix) Systèmes avec les outils GNU mais un noyau différent : GNU/Hurd, Solaris, etc Systèmes Linux sans GNU : Android GNU/Linux : système d exploitation : multitâche multi-utilisateur temps partagé Respecte la norme POSIX
23 Linux? 3/4 Structure du système GNU/Linux : 23
24 Linux? 4/4 L API Linux offre des mécanismes de communication et de synchronisation: entre threads (mutex, variables conditions ), entre processus (files de messages, mémoires partagée, sémaphore, pipes ) entre système distant (socket TCP/IP ou UDP/IP) 24
25 Les processus 1/2 25 Un processus représente l'ensemble du programme en cours d'exécution et de ses données. Un utilisateur ne peut exécuter qu'un nombre limité de processus. Le système d'exploitation attribue un numéro unique (pid) à chaque processus. Le premier processus lancé par le noyau est le processus init. Il comporte le numéro 1. Tous les autres processus sont des «fork» (processus fils). La commande ps liste les processus en cours d exécution La commande pstree donne une arborescence des processus.
26 Les processus 2/2 2 types de processus : Système: propriété du super-utilisateur (démons) Utilisateur: lancés par les utilisateurs Interruption d un processus à la réception d un signal A partir d un programme (SIGINT, SIGQUIT) A partir d un shell avec la commande: kill num_signal pid_processus les processus sont protégés les uns des autres par le système. Ils peuvent communiquer entre eux par des signaux. La liste des signaux est donnée par la commande: kill -l 26
27 Les threads Un processus possède au moins 1 thread. Partage le même espace mémoire que le processus Chaque thread a sa propre pile d appel Les threads permettent de paralléliser le déroulement du processus 27
28 La mémoire partagée 28 Les processus s exécutent en mémoire RAM. L adressage logique (mémoire découpée en page) de la RAM est différente de l adressage physique. Cette disposition permet de cloisonner l espace mémoire alloué (pas de dépassement mémoire) et de protéger le système en cas de crash d un processus. Cette gestion de la mémoire est remplie par la MMU (Memory Managing Unit). Conséquence importante : une portion physique de RAM peut apparaître dans l'espace virtuel de plusieurs processus à des adresses éventuellement différentes
29 Les mutex Mutex : MUTual EXclusion locks (verrous d exclusion mutuelle) 29 Un mutex est un verrouillage spécial qu un seul thread peut utiliser pour réaliser une tâche dans une section critique Les mutex permettent de réguler la concurrence critique au niveau de la file de tâches entre thread en autorisant qu un seul thread à accéder à cette file Les mutex évitent ainsi les problèmes d accès concurrent à une ressource et aux données partagées
30 Les sémaphores 30 Un sémaphore est un nombre entier positif ou nul représentant une quantité de ressources disponibles. Les sémaphores permettent une mise en attente lorsque cette ressource est indisponible. Les sémaphores sont des compteurs qui permettent la synchronisation de plusieurs threads Un sémaphore supporte deux opérations de base: Une opération d attente (wait), qui décrémente la valeur du sémaphore d une unité. Si la valeur est déjà à zéro, l opération est bloquante jusqu à ce que la valeur du sémaphore redevienne positive Une opération de réveil (post) qui incrémente la valeur du sémaphore d une unité. Si le sémaphore était précédemment à zéro et que d autres threads étaient en attente sur ce même sémaphore, un de ces threads est débloqué et son attente se termine (ce qui ramène la valeur du sémaphore à zéro). Il y a 1 différence entre les sémaphores POSIX et ceux implémentés sous Linux (sémaphore de processus)!
31 L ordonnanceur L actuel ordonnanceur CFS (Completely Fair Scheduler) type «best effort» Ordonnanceur basé sur une implémentation par arbres rouge-noir La priorité décroit en fonction de l'utilisation réelle du CPU 31 Il permet de gérer de l'ordonnancement par groupes de processus (exemple: par utilisateur)
32 Le multitâche 1/4 Mode restreint 32 Processus 1 Processus 2 Processus 3 Thread Espace utilisateur Espace noyau Scheduler MMU Mode privilégié
33 Le multitâche 2/4 Espace utilisateur : mode restreint = accès à certaines opérations d entrées-sorties + certaines plages mémoires => si violation : levée d une exception et reprise de contrôle par le noyau! 33 Espace privilégié : mode noyau = tous les jeux d instructions du CPU accessibles + toutes les opérations d entrées-sorties + toutes les plages mémoires via la MMU (Memory Management Unit)
34 Le multitâche 3/4 Espace utilisateur : toutes les applications s y exécutent (mode utilisateur) Espace privilégié : exécution du code noyau (mode noyau) Passage du mode utilisateur au mode noyau dans 3 cas: Appel système (sous-traitance d 1 tâche en mode noyau) Exception détectée par le CPU Interruption (périphérique) 34
35 Le multitâche 4/4 Etat des tâches: commande ps maux 35 USER PID %CPU %MEM STAT START TIME COMMAND root Oct02 0:06 /sbin/init root Ss Oct02 0:06 - root Oct02 0:00 [kthreadd] root S Oct02 0:00 - [ ] dc :04 0:00 gnome-pty-helper dc S 15:04 0:00 - dc :04 0:00 bash dc Ss 15:04 0:00 - [ ]
36 Le temps partagé 1/5 36 Définition : mode d ordonnancement permettant d allouer un temps équitable à toutes les tâches donnant ainsi l illusion d un fonctionnement simultané sur un même processeur. Temps partagé Multitâche préemptif 3 cas de figures où le CPU interrompt l exécution d 1 tâche pour en activer une autre: Volontairement en invoquant 1 appel système bloquant Involontairement avec l avènement d une interruption dont la tâche réveillée est plus prioritaire que celle en cours d exécution Temps CPU alloué à une tâche est atteint
37 Le temps partagé 2/5 Ordonnancement temps partagé: même temps d exécution pour tous les processus. Possibilité d affiner la courtoisie ( priorité) des processus par la commande «nice»de -20 (priorité haute) à 19 (priorité basse). Par défaut : 0 Exemples: nice -n -20./nom_de_executable (processus très prioritaire) nice -n 5./nom_de_executable En programmation C, ce sont les fonctions : Int getpriority (int type, int ident); Int setpriority(int type, int ident, int nice); 37 Pour passer d une tâche à une autre : changement de contexte
38 Le temps partagé 3/5 Limitations de l ordonnancement temps partagé: 38 Le noyau linux actuel nous permet de mesurer l heure avec une précision de l ordre de la microseconde Nous obtenons des timers logiciels dont la période se mesure en dizaine ou centaine de microsecondes Dans le cas d un comportement périodique, si le système est chargé => mesure moins efficace L ordonnancement temps partagé induit une fluctuation (jitter) des timers et des préemptions inévitables des tâches.
39 Le temps partagé 4/5 MESURE D'UNE OPERATION CRITIQUE : mesure 30 fois l heure en boucle et affichage des résultats APRES la mesure Utilisation de la fonction: gettimeofday() 39 Précision de mesure du temps avec la fonction time() avec mon vieux portable x86 (Dual core, 1.86 Ghz, frequence bus 533Mhz) : 0 : : : : : : : : : : : : : : : : : : : : : Saut de 2 à 3microsecondes
40 Le temps partagé 5/5 MESURE D'UNE OPERATION CRITIQUE : Précision de mesure du temps avec la fonction time() avec une carte ARM (Mono-coeur, Frq :180 Mhz) : 40 0 : : : : : : : : : : : : : : : : : : : : : Saut de 30 microsecondes!
41 PLAN : 1 ère partie Système d exploitation Système d exploitation Historique des ordinateurs Définition Différents types Typologie Composition Organisation générale Système d exploitation Linux Linux? Les processus Les Threads La Mémoire Partagée Les Mutex Les Sémaphores L ordonnanceur Le multitâche Le temps partagé Le temps réel Conclusion Améliorer la réactivité d un système Rendre temps réel Linux 41
42 Conclusion : améliorer la réactivité d un système On peut améliorer la réactivité d'un système à différentes stimulations : 42 Temps de réponse aux interruptions matérielles : dialogue avec des dispositifs externes, liens de communication, pilotage de processus industriels, etc. Granularité et précision des timers logiciels : déclenchement d'événements cadencés régulièrement, émission de données dans des créneaux temporels précis, etc. Priorités des tâches : précédence de réponse à un événement externe, réactivité de l'interface utilisateur, traitements en tâche de fond...
43 Conclusion: rendre temps réel Linux En dégraissant le noyau original (vanilla) d options inutiles. En activant/désactivant quelques options pertinentes du noyau: Désactiver «Tickless System» Activer le support «High Resolution Timer» Activer «Preemptible Kernel (Low-Latency Desktop)» En patchant le noyau initial par Linux-rt avantages : même API et même noyau => bonne portabilité, apparition de l option «Preemptible kernel» dans le menu de compilation Inconvénient : temps réel mou En dédiant un noyau (nanokernels) aux tâches temps réel : RTLinux (très ancien) RTAI (ancien) Xenomai (à utiliser -> très bien maintenu ; API dédié au temps réel => apprentissage plus long) 43
44 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test 44 Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion
45 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test 45 Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion
46 Retour d expérience Problème de pérennité (pilote de périphérique lié à une machine - OS) et de coût exorbitant de National Instrument Manque de compétence en système embarqué au laboratoire (2009) 46 Etude faite sur le tas avec des connaissances initiales d ASR Présentation orientée pédagogie avec la création pas à pas d un système embarqué Linux sur x86
47 Création d un système Linux 47 Tutoriel sur carte x86 du moins vers le plus!! 1. Création de la partition pour accueillir le système sur le serveur(<30 Mo) + utilisation de Grub 2. Compilation et installation de Busybox 3. Copie des bibliothèques dynamiques utilisées par Busybox 4. Création des répertoires 5. Compilation et installation du noyau 6. Création des fichiers spéciaux pour les périphériques 7. Script de démarrage du système 8. Compilation + intégration du module GPIB dans le système de fichiers 9. Test du système
48 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test 48 Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion
49 Unité de Contrôle et de Communication 1/9. Création de la partition pour accueillir le système sur le serveur (<30 Mo) 49 Création de la partition : fdisk /dev/hda Formatage de la partition : mk2efs -j /dev/hda4 Montage de la partition : mkdir /mnt/emb mount /dev/hda4 /mnt/emb Montage systématique de la partition au démarrage : => ajout de la ligne suivante au fichier /etc/fstab de notre distribution: /dev/hda4 /mnt/emb ext3 defaults 0 0
50 Unité de Contrôle et de Communication 2/9 Compilation et installation de Busybox 50 Compilation : make menuconfig make Installation : make install Résultat :
51 Unité de Contrôle et de Communication 3/9 Copie des bibliothèques dynamiques utilisées par Busybox 51 Outil mklibs : cd /mnt/emb mkdir lib mklibs -v -d lib bin/*
52 Unité de Contrôle et de Communication 4/9 Création des répertoires cd /mnt/emb mkdir -p boot dev etc home mnt/floppy mnt/gpib proc root sys share tmp usr var/log var/run chmod 1777 tmp 52 /mnt/emb


53 Unité de Contrôle et de Communication 5/9 Compilation et installation du noyau 53 Compilation : export INSTALL_PATH=/mnt/emb/boot export INSTALL_MOD_PATH=/mnt/emb make menuconfig make Installation : make install
54 Unité de Contrôle et de Communication 6/9 Création des fichiers spéciaux pour les périphériques 54 Utilisation de la commande MAKEDEV : Copie de l exécutable dans la partition dédiée à l embarqué : cp /sbin/makedev /mnt/emb/dev/ Déplacement vers le répertoire où l exécutable a été copié : cd /mnt/emb/dev/ Génération des fichiers spéciaux :./MAKEDEV generic
55 Unité de Contrôle et de Communication 7/9 Script de démarrage du système 55 Après le lancement du processus init par le noyau celui-ci via le fichier /mnt/emb/etc/inittab lance l exécutable /mnt/emb/etc/init.d/rcs Ce fichier permet d initialiser le système et de démarrer un certain nombre de processus Extrait du script rcs : [ ] echo "Mounting proc et sys filesystem: " ; mount -t proc /proc /proc mount -t sysfs none /sys # Remount the root filesystem in read-write mode echo "Remounting root device with read-write enabled" /bin/mount -w -n -o remount / [ ]
56 Unité de Contrôle et de Communication 8/9 Compilation + intégration du module GPIB dans le système de fichiers 56 Projet Libre et toujours actif à l adresse : Compilation du module par :./configure & make & make install Installation du module et de ses librairies : cp ni_usb_gpib.ko /mnt/emb/lib/modules/ /gpib cp -pr /lib/libpthread* /mnt/emb/lib/ Unique fichier de configuration /etc/gpib.conf très détaillé Lecture de la configuration de notre interface en lançant l exécutable gpib_conf Écriture des programmes de lecture et d écriture pour notre interface GPIB
57 Unité de Contrôle et de Communication 9/9 : Tests 1/5 : test de fonctionnement général 57 Test du système Test du module GPIB
58 Unité de Contrôle et de Communication 9/9 : Test 2/5 : schéma de mesure 58 PC hôte Signal carré périodique de fréquence : 1250Hz Amplitude : 0.6V Flot de données utilisateur par Ethernet et/ou port série Sonde Oscilloscope Convertisseur USB/GPIB Système embarqué X86 crochet GPIB USB
59 Unité de Contrôle et de Communication 9/9 : Test 3/5 : commande GPIB Programmes écrits en C Envoi des commandes 59 GPIB : gpib_config gpib_write 1 "*cls" gpib_write 1 "*rst" gpib_write 1 "autoscale" gpib_write 1 ":waveform:source channel1" gpib_write 1 ":acquire:type normal" gpib_write 1 ":acquire:complete 100" gpib_write 1 ":waveform:points 1000" gpib_write 1 ":waveform:format byte" gpib_write 1 ":digitize channel1 " Commandes envoyées à l oscilloscope Adresse primaire de l oscilloscope Réception des données : gpib_ read_preamble gpib_read_bin_data
60 Unité de Contrôle et de Communication 9/9 : Test 4/5 Résultat du test 60 Extrait des Data brutes récupérées de l oscilloscope : Signal initial : 2d 2d 2e 2d 2e 2d 2f 2e 2e 2e 2e 2e 2e 2e 2e 2e 2f 2e 2f 2f 2f 2e 2e 2f 2e 2e 2e 2f 2f 2f 2f 2e 2e 2f 2e 2f 2f 2e 2f 2f 2e 2f 2f 2f 2f 2f 2f 2f 2f 2f 2f 2f 2f 2e 2f 2e 2f 2f 30 2f 30 2f 2f 2f 2f 2f 2f 2f 2f 30 2f 2f 2f 2f 2f 30 2f 2f 2f 2f 2f 2f 2f 2f f 2f 30 2f f df df de df df de de de de de de dd dc dd dd dc dc dc dc db db db db db da da da d9 d9 d9 d9 d9 d8 d9 d8 d9 d8 d8 d8 d8 d8 d7 d7 d7 d7 d7 d6 d7 d7 d6 d6 d7 d6 d6 d5 d5 d6 d5 d5 d6 d5 d5 d4 d5 d5 d5 d5 d5 d4 d5 d4 d5 d4 d4 d4 d3 d4 d2 d3 d3 d4 d3 d4 d4 d3 d3 d3 d2 d3 d3 d3 d3 d3 d3 d3 d3 d3 d3 d2 d3 d3 d3 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d2 d1 d0 d1 d0 d0 d2 d2 d1 d1 d1 d2 d1 d1 d1 d2 d1 d1 d1 d2 d1 d1 d2 d1 d1 d1 d1 d1 d0 d2 d1 d0 d2 d1 d1 d2 d1 d0 d1 d1 d1 d1 d2 d2 d2 d1 d1 d1 d1 d0 d1 d2 d0 d1 d1 d0 d0 d0 d1 d1 d1 d1 d1 d0 d1 d1 d1 d1 d1 d1 d0 d2 d1 d1 d1 d1 d1 d1 3a a a 29 2b a 2a 2a 2b 2b 2a 2b 2b 2b 2b 2b
61 Unité de Contrôle et de Communication 9/9 : Test 5/5 Résultat du test Signal initial : 61 Après post-traitement : Résultat sous Igor Volts 0.6 V Temps Période: 0.8ms ->1250Hz
62 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion 62
63 Unité de Contrôle et de Communication Adaptation sur ARM et perspectives du projet Mise en œuvre du protocole de conception du système sur carte KB9200 de Kwikbyte (ARM 9) : Carte supportée nativement par les noyaux Linux de la famille 2.6 Installation d une chaîne de compilation croisée Compilation avec les options pour make : ARCH=arm CROSS_COMPILE=arm-linuxpour configure : --build=i686-pc-linux-gnu host=arm-linux 63 Mise en place du Temps réel (en cours) Utilisation de la bibliothèque µclibc pour alléger l empreinte mémoire Mesure en continu -> Pilotage par CORBA (Common Object Request Broker)?
64 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test 64 Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion
65 Unité de Contrôle et de Communication Vue générale sur cible ARM 65
66 PLAN : 2 ème partie retour d expérience Création d un système Linux Unité de Contrôle et de Communication Création de la partition pour accueillir le système sur le serveur (<30 Mo) Compilation et installation de Busybox Copie des bibliothèques dynamiques utilisées par Busybox Création des répertoires Compilation et installation du noyau Création des fichiers spéciaux pour les périphériques Script de démarrage du système Compilation + intégration du module GPIB dans le système de fichiers Tests : test de fonctionnement général schéma de mesure commande GPIB Résultat du test Résultat du test 66 Adaptation sur ARM et perspectives du projet Vue générale sur cible ARM Conclusion
67 Conclusion Le cheminement de la solution du développement sur architecture x86 et ARM est proche Le résultat attendu est bon. Adaptation de la solution en temps réel en cours Pour éviter de «refaire» un système embarqué Linux «from scratch», étude de l adaptation du projet à partir des projets Buildroot et OpenEmbedded. 67
68 Plan : 3 ème partie Temps réel Temps réel en général 68 Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie
69 Plan : 3 ème partie Temps réel Temps réel en général Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie 69
70 Définition 1/2 Définition : un système est dit temps réel lorsque l information après acquisition et traitement reste encore pertinente 70 Temps réel mou (système acceptant des variations de l ordre de la milliseconde dans le traitement de données) : répartition égalitaire du temps processeur. Ces systèmes garantissent un temps moyen d exécution pour chaque tâche Temps réel dur : gestion stricte du temps est nécessaire pour conserver l intégrité du service rendu. Ces systèmes garantissent un temps maximum d exécution pour chaque tâche
71 Définition 2/2 71 Réponse acceptable Réponse obsolète 1 Temps réel dur Limite t 1 Temps réel souple Limite t
72 Tableau comparatif 72 Périodes minimales Timer Fluctuations maximales Réponse aux interruptions externes Temps de réponse moyen Fluctuation des temps de réponse Priorités Linux «vanilla» QQ 10µs QQ 100 µs QQ µs QQ 100 µs Linux -RT QQ 10µs QQ 10 µs QQ µs QQ 10 µs Les tâches applicatives les plus prioritaires sont néanmoins préemptées par des traitements d'interruptions éventuellement longs. Certaines tâches applicatives peuvent avoir une priorité supérieure à celles des traitements d'interruptions. Xenomai QQ 10µs QQ µs QQ µs QQ µs Tâches Xenomai plus prioritaires que celles du noyau natif
73 Temps réel mou 1/5 Utilitaire chrt pour lancer un processus en temps réel même si celui-ci n a pas été prévu Exemple: chrt f 50./executable //executable lancé en ord. Fifo de priorité 50 chrt r 10./executable //executable lancé en ord. RR de priorité 10 chrt o 0./executable //executable lancé en ord. partagé 73 chrt p //affiche l ord. Et la priorité du process chrt pf //passe le process en FIFO de prio 50 chrt pr //passe le process en RR de prio 30
74 Temps réel mou 2/5 Utilitaire taskset qui permet de fixer ou de récupérer l affinité d un processus au CPU en console. Exemple : taskset c 1./executable //processus lancé sur le CPU1 taskset 0,1./executable //processus lancé sur le CPU 0 et 1 taskset pc //migration du processus 2013 sur le CPU 0 taskset p 2013 //affiche l affinité du processus 2013 En programmation : utilisation 2 fonctions : #define _GNU_SOURCE //constante symbolique => pas POSIX #include <sched.h> 74 int sched_setaffinity(pid_t size_t cpu_set_t int sched_getaffinity(pid_t size_t cpu_set_t pid, cpusetsize, *cpuset); pid, cpusetsize, *cpuset); Identifiant du processus Taille du type de donnée Usage du CPU
75 Echelle des priorités: Temps réel mou 3/5 Tâche temps réel située dans l échelle de priorité [1,99] Tâche de priorité 0 : temps partagé La tâche de priorité 49 ne s exécutera que lorsque de la tâche de priorité 50 s endorme. Si une tâche de priorité 51 se réveille, la tâche 50 est préemptée! 75
76 Temps réel mou 4/5 Quand 2 tâches ont le même niveau de priorité? 2 types de traitement suivant l ordonnancement temps réel utilisé : 76 FIFO (First In, First Out) : pas de préemption de la tâche en cours si la nouvelle est de même priorité Round Robin (tourniquet) : préemption de la tâche en cours au bout d un moment par une tâche de même niveau de priorité
77 Temps réel mou 5/5 Il existe un garde-fou temps réel natif depuis le noyau de Linux. Une petite partie du temps CPU 5% est réservé aux tâches temps partagé même quand les tâches temps réels s éxecutent Temps réel souple adapté pour faire fonctionner des tâches périodiques de quelques centaines de microsecondes. 77
78 Les limites du temps réel mou Problème temps réel (mou) classiques 78 Un thread créé préempte son créateur et l empêche de créer les autres threads équivalent => mise en place de barrières POSIX Inversion de priorité => mise en place du Priority Inheritance Protocol (PIP) activable à l initialisation du mutex Un thread lâchant un mutex et le demandant à nouveau au détriment des autres => employez la fonction sched_yield( )
79 Plan : 3 ème partie Temps réel Temps réel en général Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie 79
80 Outils de mesure des performances Outils de test de système temps réel Cyclitest : mesure les fluctuations et les latences de divers paramètres Hwlatency: détecte les latences dues au matériel 80 Hackbench: mesure la commutation entre threads et processus Pi_stress : test l implémentation des héritages de priorités sur les mutex Et bien d autres sur
81 Plan : 3 ème partie Temps réel Temps réel en général Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie 81
82 Exemple : temps partagé 82 Durées entre déclenchements successif du timer NB d occurrences - Mesures importantes autour de la valeur de consigne : 1ms - Quelques écart existent autour de la valeur Durée entre déclenchements successifs du timer (ms)
83 Exemple : temps partagé 83 Durées entre déclenchements successif du timer - Dispersion plus large autour de la valeur de consigne 1ms - Apparition de valeurs extrême à 3,7ms NB d occurrences Durée entre déclenchements successifs du timer (ms)
84 Exemple : temps réel-patch Linux-rt 84 Durées entre déclenchements successif du timer NB d occurrences - Taux de mesures importantes autour de la valeur de consigne : 1ms - Aucun écart autour de la valeur!! Durée entre déclenchements successifs du timer (ms)
85 Exemple : temps réel-patch Linux-rt 85 Durées entre déclenchements successif du timer NB d occurrences - Petites dispersions autour de la valeur de consigne 1ms - Aucune valeur extrême!!! Durée entre déclenchements successifs du timer (ms)
86 Exemple : temps partagé 86 Temps de commutations entre 2 threads synchronisés sur 1 ressource partagée (mutex) NB d occurrences - Petites dispersions - Quelques valeurs extrêmes!!! Durée (ms)
87 Exemple : temps réel-patch Linux-rt 87 Temps de commutations entre 2 threads synchronisés sur 1 ressources partagée (mutex) NB d occurrences - Petites dispersions autour de la valeur - Aucune valeur extrême!!! Durée (ms)
88 Exemple : temps partagé 88 Temps de commutations entre 2 processus synchronisés sur 1 ressource partagée (mutex) NB d occurrences - Les durées moyennes et maximales sont plus longues - Beaucoup plus de dispersement que les threads Durée (ms)
89 Exemple : temps réel-patch Linux-rt 89 Temps de commutations entre 2 processus synchronisés sur 1 ressource partagée (mutex) NB d occurrences - Petites dispersions autour de la valeur de consigne quelques millisecondes - 1 valeur extrême!!! Durée (ms)
90 Plan : 3 ème partie Temps réel Temps réel en général 90 Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie
91 Conclusion Un système en temps partagé classique répond à beaucoup de critère Le temps réel «mou» (patch Linux-RT) est facilement adaptable pour de bon résultats sans connaissances particulières supplémentaires(même API) 91 Le temps rée «dur» est en fait pas si utilisé que cela. Seulement 10% des projets en industrie sont concernés!
92 Plan : 3 ème partie Temps réel Temps réel en général Définition Tableau comparatif Temps réel mou Les limites du temps réel mou Outils de mesure des performances Exemples Conclusion Bibliographie 92
93 Les sites web : Bibliographie 1/
94 Les magazines : Bibliographie 2/3 94
95 Bibliographie 3/3 Salon RTS (mars/avril) Paris porte de Versailles (vous pouvez demander les présentations aux séminaristes : electroniques.com/ 95 Les livres:
Introduction aux Systèmes et aux Réseaux, Master 2 CCI
 aux Systèmes et aux Réseaux, Master 2 CCI Cours 1 : Introduction et contexte Unix/Linux Laure Gonnord http://laure.gonnord.org/pro/teaching/ [email protected] Master CCI - Université Lyon 1 -
aux Systèmes et aux Réseaux, Master 2 CCI Cours 1 : Introduction et contexte Unix/Linux Laure Gonnord http://laure.gonnord.org/pro/teaching/ [email protected] Master CCI - Université Lyon 1 -
Introduction aux Systèmes et aux Réseaux
 Introduction aux Systèmes et aux Réseaux Cours 5 Processus D après un cours de Julien Forget (univ Lille1) Laure Gonnord http://laure.gonnord.org/pro/teaching/ [email protected] Master CCI -
Introduction aux Systèmes et aux Réseaux Cours 5 Processus D après un cours de Julien Forget (univ Lille1) Laure Gonnord http://laure.gonnord.org/pro/teaching/ [email protected] Master CCI -
1 Mesure de la performance d un système temps réel : la gigue
 TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
TP TR ENSPS et MSTER 1 Travaux Pratiques Systèmes temps réel et embarqués ENSPS ISV et Master TP1 - Ordonnancement et communication inter-processus (IPC) Environnement de travail Un ordinateur dual-core
Processus! programme. DIMA, Systèmes Centralisés (Ph. Mauran) " Processus = suite d'actions = suite d'états obtenus = trace
 Processus = suite d'actions = suite d'états obtenus = trace") Processus 1) Contexte 2) Modèles de Notion de Points de vue Modèle fourni par le SX Opérations sur les 3) Gestion des Représentation des Opérations 4) Ordonnancement des Niveaux d ordonnancement Ordonnancement
Processus 1) Contexte 2) Modèles de Notion de Points de vue Modèle fourni par le SX Opérations sur les 3) Gestion des Représentation des Opérations 4) Ordonnancement des Niveaux d ordonnancement Ordonnancement
Session 8: Android File System
 Session 8: Android File System LO52 - Automne 2014 Fabien BRISSET 2 mai 2014 [email protected] www.utbm.fr Droits de reproduction Copyright 2013-2014, Fabien Brisset, Copyright 2004-2014, Free Electrons
Session 8: Android File System LO52 - Automne 2014 Fabien BRISSET 2 mai 2014 [email protected] www.utbm.fr Droits de reproduction Copyright 2013-2014, Fabien Brisset, Copyright 2004-2014, Free Electrons
Exécutif temps réel Pierre-Yves Duval (cppm)
") Exécutif temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 Plan Exécutif Tâches Evénements et synchronisation Partage de ressources Communications
Exécutif temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 Plan Exécutif Tâches Evénements et synchronisation Partage de ressources Communications
REALISATION d'un. ORDONNANCEUR à ECHEANCES
 REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre. Partie I : Introduction
 Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre Partie I : Introduction Plan de la première partie Quelques définitions Caractéristiques communes des applications temps-réel Exemples d
Informatique industrielle A7-19571 Systèmes temps-réel J.F.Peyre Partie I : Introduction Plan de la première partie Quelques définitions Caractéristiques communes des applications temps-réel Exemples d
Personnes ressources Tice. Académie de Rouen
 Personnes ressources Tice Académie de Rouen Objectifs Acquérir les connaissances de base concernant Linux Découvrir la solution technique SambaEdu3 : serveur de fichiers sous Linux Mettre en oeuvre cette
Personnes ressources Tice Académie de Rouen Objectifs Acquérir les connaissances de base concernant Linux Découvrir la solution technique SambaEdu3 : serveur de fichiers sous Linux Mettre en oeuvre cette
CH.3 SYSTÈMES D'EXPLOITATION
 CH.3 SYSTÈMES D'EXPLOITATION 3.1 Un historique 3.2 Une vue générale 3.3 Les principaux aspects Info S4 ch3 1 3.1 Un historique Quatre générations. Préhistoire 1944 1950 ENIAC (1944) militaire : 20000 tubes,
CH.3 SYSTÈMES D'EXPLOITATION 3.1 Un historique 3.2 Une vue générale 3.3 Les principaux aspects Info S4 ch3 1 3.1 Un historique Quatre générations. Préhistoire 1944 1950 ENIAC (1944) militaire : 20000 tubes,
MI03 TP. Objectifs du TP 1ère séance. 2ème séance. Construction d'un système linux embarqué complet
 MI03 TP Objectifs du TP 1ère séance Construction d'un système linux embarqué complet 2ème séance Mise en place d'un environnement de développement croisé Intégration de l'extension temps réél Xenomai La
MI03 TP Objectifs du TP 1ère séance Construction d'un système linux embarqué complet 2ème séance Mise en place d'un environnement de développement croisé Intégration de l'extension temps réél Xenomai La
Atelier : Virtualisation avec Xen
 Virtualisation et Cloud Computing Atelier : Virtualisation avec Xen Plan Présentation de Xen Architecture de Xen Le réseau Gestion des domaines DomU dans Xen Installation de Xen Virt. & Cloud 12/13 2 Xen
Virtualisation et Cloud Computing Atelier : Virtualisation avec Xen Plan Présentation de Xen Architecture de Xen Le réseau Gestion des domaines DomU dans Xen Installation de Xen Virt. & Cloud 12/13 2 Xen
PRESENTATION RESSOURCES. Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille
 PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
Chapitre IX : Virtualisation
 Chapitre IX : Virtualisation Eric Leclercq & Marinette Savonnet Département IEM http://ufrsciencestech.u-bourgogne.fr http://ludique.u-bourgogne.fr/~leclercq 5 mai 2011 1 Principes Problématique Typologie
Chapitre IX : Virtualisation Eric Leclercq & Marinette Savonnet Département IEM http://ufrsciencestech.u-bourgogne.fr http://ludique.u-bourgogne.fr/~leclercq 5 mai 2011 1 Principes Problématique Typologie
DAns un système multi-utilisateurs à temps partagé, plusieurs processus
 Chapitre 8 Ordonnancement des processus Dns un système multi-utilisateurs à temps partagé, plusieurs processus peuvent être présents en mémoire centrale en attente d exécution. Si plusieurs processus sont
Chapitre 8 Ordonnancement des processus Dns un système multi-utilisateurs à temps partagé, plusieurs processus peuvent être présents en mémoire centrale en attente d exécution. Si plusieurs processus sont
Base de l'informatique. Généralité et Architecture Le système d'exploitation Les logiciels Le réseau et l'extérieur (WEB)
") Base de l'informatique Généralité et Architecture Le système d'exploitation Les logiciels Le réseau et l'extérieur (WEB) Généralité Comment fonctionne un ordinateur? Nous définirons 3 couches Le matériel
Base de l'informatique Généralité et Architecture Le système d'exploitation Les logiciels Le réseau et l'extérieur (WEB) Généralité Comment fonctionne un ordinateur? Nous définirons 3 couches Le matériel
Systèmes d exploitation
 Systèmes d exploitation Virtualisation, Sécurité et Gestion des périphériques Gérard Padiou Département Informatique et Mathématiques appliquées ENSEEIHT Novembre 2009 Gérard Padiou Systèmes d exploitation
Systèmes d exploitation Virtualisation, Sécurité et Gestion des périphériques Gérard Padiou Département Informatique et Mathématiques appliquées ENSEEIHT Novembre 2009 Gérard Padiou Systèmes d exploitation
Unix/Linux I. 1 ere année DUT. Université marne la vallée
 Unix/Linux I 1 ere année DUT Université marne la vallée 1 Introduction 2 Fonctions et spécifité d Unix Architecture 3 4 5 Fichier Unix Arborescence de fichiers Quelques commandes sur les fichiers Chemins
Unix/Linux I 1 ere année DUT Université marne la vallée 1 Introduction 2 Fonctions et spécifité d Unix Architecture 3 4 5 Fichier Unix Arborescence de fichiers Quelques commandes sur les fichiers Chemins
Cours Programmation Système
 Cours Programmation Système Filière SMI Semestre S6 El Mostafa DAOUDI Département de Mathématiques et d Informatique, Faculté des Sciences Université Mohammed Premier Oujda [email protected] Février
Cours Programmation Système Filière SMI Semestre S6 El Mostafa DAOUDI Département de Mathématiques et d Informatique, Faculté des Sciences Université Mohammed Premier Oujda [email protected] Février
Introduction à l informatique en BCPST
 Introduction à l informatique en BCPST Alexandre Benoit BCPST L informatique en BCPST «L enseignement de l informatique en classes préparatoires de la filière BCPST a pour objectif d introduire puis de
Introduction à l informatique en BCPST Alexandre Benoit BCPST L informatique en BCPST «L enseignement de l informatique en classes préparatoires de la filière BCPST a pour objectif d introduire puis de
Manuel de System Monitor
 Chris Schlaeger John Tapsell Chris Schlaeger Tobias Koenig Traduction française : Yves Dessertine Traduction française : Philippe Guilbert Traduction française : Robin Guitton Relecture de la documentation
Chris Schlaeger John Tapsell Chris Schlaeger Tobias Koenig Traduction française : Yves Dessertine Traduction française : Philippe Guilbert Traduction française : Robin Guitton Relecture de la documentation
Linux 1: Présentation
 1: Présentation 11.05.04, Avon [email protected], IGM, Université de Marne-la-Vallée 1: Présentation Unix Normalisation Consortiums Logiciel libre Distributions Conseils Caractéristiques Notions 1: Présentation
1: Présentation 11.05.04, Avon [email protected], IGM, Université de Marne-la-Vallée 1: Présentation Unix Normalisation Consortiums Logiciel libre Distributions Conseils Caractéristiques Notions 1: Présentation
Construction et sécurisation d'un système Linux embarqué. Frédéric AIME [email protected] 0 950 260 370
 Construction et sécurisation d'un système Linux embarqué Frédéric AIME [email protected] 0 950 260 370 Différentes approches Création d'une distribution From Scratch Nécessite un investissement intellectuel
Construction et sécurisation d'un système Linux embarqué Frédéric AIME [email protected] 0 950 260 370 Différentes approches Création d'une distribution From Scratch Nécessite un investissement intellectuel
UBUNTU Administration d'un système Linux (4ième édition)
") Ubuntu et Linux 1. Affirmation du modèle open source 21 1.1 Principe et avenir du modèle 21 1.1.1 Open source et capitalisme financier 22 1.1.2 Open source et logiciel libre 23 1.2 Place de Linux dans
Ubuntu et Linux 1. Affirmation du modèle open source 21 1.1 Principe et avenir du modèle 21 1.1.1 Open source et capitalisme financier 22 1.1.2 Open source et logiciel libre 23 1.2 Place de Linux dans
Cours A7 : Temps Réel
 Cours A7 : Temps Réel Pierre.Paradinas / @ / cnam.fr Cnam/Cedric Systèmes Enfouis et Embarqués (SEE) Motivations Du jour : les mécanismes multitâches, la gestion des priorités, l ordonnancement, la gestion
Cours A7 : Temps Réel Pierre.Paradinas / @ / cnam.fr Cnam/Cedric Systèmes Enfouis et Embarqués (SEE) Motivations Du jour : les mécanismes multitâches, la gestion des priorités, l ordonnancement, la gestion
Les avantages de la virtualisation sont multiples. On peut citer:
 1 Les mécanismes de virtualisation ont été introduits il y a fort longtemps dans les années 60 par IBM avec leur système CP/CMS. La motivation première de la virtualisation est la possibilité d'isoler
1 Les mécanismes de virtualisation ont été introduits il y a fort longtemps dans les années 60 par IBM avec leur système CP/CMS. La motivation première de la virtualisation est la possibilité d'isoler
Il est courant de souhaiter conserver à
 Il est courant de souhaiter conserver à la fois Linux et Windows sur un même ordinateur, en particulier pour découvrir Linux, pour garder un filet de sécurité, ou pour continuer à jouer à des jeux récents
Il est courant de souhaiter conserver à la fois Linux et Windows sur un même ordinateur, en particulier pour découvrir Linux, pour garder un filet de sécurité, ou pour continuer à jouer à des jeux récents
Runtime. Gestion de la réactivité des communications réseau. François Trahay Runtime, LaBRI sous la direction d'alexandre Denis Université Bordeaux I
 Runtime Gestion de la réactivité des communications réseau François Trahay Runtime, LaBRI sous la direction d'alexandre Denis Université Bordeaux I 1 Le calcul hautes performances La tendance actuelle
Runtime Gestion de la réactivité des communications réseau François Trahay Runtime, LaBRI sous la direction d'alexandre Denis Université Bordeaux I 1 Le calcul hautes performances La tendance actuelle
<Insert Picture Here> Solaris pour la base de donnés Oracle
 Solaris pour la base de donnés Oracle Alain Chéreau Oracle Solution Center Agenda Compilateurs Mémoire pour la SGA Parallélisme RAC Flash Cache Compilateurs
Solaris pour la base de donnés Oracle Alain Chéreau Oracle Solution Center Agenda Compilateurs Mémoire pour la SGA Parallélisme RAC Flash Cache Compilateurs
Département de génie électrique. ELE784 - Ordinateurs et programmation système. Laboratoire #1
 Département de génie électrique ELE784 - Ordinateurs et programmation système Laboratoire #1 Développement des composantes logicielles de base d un système informatique Description sommaire : Dans ce laboratoire,
Département de génie électrique ELE784 - Ordinateurs et programmation système Laboratoire #1 Développement des composantes logicielles de base d un système informatique Description sommaire : Dans ce laboratoire,
1 Architecture du cœur ARM Cortex M3. Le cœur ARM Cortex M3 sera présenté en classe à partir des éléments suivants :
 GIF-3002 SMI et Architecture du microprocesseur Ce cours discute de l impact du design du microprocesseur sur le système entier. Il présente d abord l architecture du cœur ARM Cortex M3. Ensuite, le cours
GIF-3002 SMI et Architecture du microprocesseur Ce cours discute de l impact du design du microprocesseur sur le système entier. Il présente d abord l architecture du cœur ARM Cortex M3. Ensuite, le cours
Cloner un disque dur
 Cloner un disque dur Préambule: J'ai testé beaucoup d'outils disponibles sur le Web, pour cloner des disques dur et/ou des partitions, dans de nombreux cas et sur de nombreuses machines, et avec de nombreux
Cloner un disque dur Préambule: J'ai testé beaucoup d'outils disponibles sur le Web, pour cloner des disques dur et/ou des partitions, dans de nombreux cas et sur de nombreuses machines, et avec de nombreux
Environnement Informatique EMSE Linux
 Environnement Informatique EMSE Linux Xavier Serpaggi École Nationale Supérieure des Mines de Saint-Étienne. Septembre 2013 Xavier Serpaggi (ENSM-SE) Environnement Informatique
Environnement Informatique EMSE Linux Xavier Serpaggi École Nationale Supérieure des Mines de Saint-Étienne. Septembre 2013 Xavier Serpaggi (ENSM-SE) Environnement Informatique
Systèmes informatiques
 Systèmes informatiques Franck Guingne, sur la base du cours d Olivier Lecarme Cours Licence 1; Semestre 2 2009 2010 Troisième cours : Installation d une distribution GNU/Linux. 1 Les différentes distributions
Systèmes informatiques Franck Guingne, sur la base du cours d Olivier Lecarme Cours Licence 1; Semestre 2 2009 2010 Troisième cours : Installation d une distribution GNU/Linux. 1 Les différentes distributions
IFT2245 - Systèmes d exploitation - TP n 1-20%
 IFT2245 - Systèmes d exploitation - TP n 1-20% DIRO - Université de Montréal Nicolas Rous et Dorian Gomez Disponible : 14/02/2013 - Remise : 28/03/2013 au début de la démo LISEZ TOUT LE DOCUMENT AVANT
IFT2245 - Systèmes d exploitation - TP n 1-20% DIRO - Université de Montréal Nicolas Rous et Dorian Gomez Disponible : 14/02/2013 - Remise : 28/03/2013 au début de la démo LISEZ TOUT LE DOCUMENT AVANT
Virtualisation logicielle De la machine réelle à la machine virtuelle abstraite
 Virtualisation logicielle De la machine réelle à la machine virtuelle abstraite Bertil FOLLIOT et Gaël THOMAS Cette version est une préversion de l article accepté par «Technique de l ingénieur» (Hermes).
Virtualisation logicielle De la machine réelle à la machine virtuelle abstraite Bertil FOLLIOT et Gaël THOMAS Cette version est une préversion de l article accepté par «Technique de l ingénieur» (Hermes).
HISTORIQUE DES SYSTEMES D'EXPLOITATION (S.E.)
") SYSTEME Chapitre 1 HISTORIQUE DES SYSTEMES D'EXPLOITATION (S.E.) Ce qu'est un S.E. = partie intelligente d'un système donné. Les S.E. ont évolué au fil des années. Ils dépendent de l'architecture des ordinateurs
SYSTEME Chapitre 1 HISTORIQUE DES SYSTEMES D'EXPLOITATION (S.E.) Ce qu'est un S.E. = partie intelligente d'un système donné. Les S.E. ont évolué au fil des années. Ils dépendent de l'architecture des ordinateurs
Chapitre 3 : Système de gestion de fichiers
 : 3.1- Introduction Le système de gestion de fichiers (SGF) est la partie la plus visible d un système d exploitation qui se charge de gérer le stockage et la manipulation de fichiers (sur une unité de
: 3.1- Introduction Le système de gestion de fichiers (SGF) est la partie la plus visible d un système d exploitation qui se charge de gérer le stockage et la manipulation de fichiers (sur une unité de
Administration de systèmes
 Administration de systèmes Windows NT.2000.XP.2003 Copyright IDEC 2002-2004. Reproduction interdite. Sommaire... 2 Eléments logiques et physiques du réseau... 5 Annuaire et domaine... 6 Les utilisateurs
Administration de systèmes Windows NT.2000.XP.2003 Copyright IDEC 2002-2004. Reproduction interdite. Sommaire... 2 Eléments logiques et physiques du réseau... 5 Annuaire et domaine... 6 Les utilisateurs
Le système GNU/Linux IUP NTIC2-1013 - 17/11/05
 Capocchi Laurent Doctorant en Informatique [email protected] http://spe.univ-corse.fr/capocchiweb Objectifs Comprendre les notions de noyau Linux et des modules. Le système GNU/Linux IUP NTIC2-1013
Capocchi Laurent Doctorant en Informatique [email protected] http://spe.univ-corse.fr/capocchiweb Objectifs Comprendre les notions de noyau Linux et des modules. Le système GNU/Linux IUP NTIC2-1013
TAI049 Utiliser la virtualisation en assistance et en dépannage informatique TABLE DES MATIERES
 TAI049 Utiliser la virtualisation en assistance et en dépannage informatique TABLE DES MATIERES 1 DECOUVERTE DE LA VIRTUALISATION... 2 1.1 1.2 CONCEPTS, PRINCIPES...2 UTILISATION...2 1.2.1 Formation...2
TAI049 Utiliser la virtualisation en assistance et en dépannage informatique TABLE DES MATIERES 1 DECOUVERTE DE LA VIRTUALISATION... 2 1.1 1.2 CONCEPTS, PRINCIPES...2 UTILISATION...2 1.2.1 Formation...2
Catalogue des stages Ercom 2013
 Catalogue des stages Ercom 2013 Optimisations sur Modem LTE Poste basé à : Caen (14) Analyse et optimisation des performances des traitements réalisés dans un modem LTE. - Profiling et détermination des
Catalogue des stages Ercom 2013 Optimisations sur Modem LTE Poste basé à : Caen (14) Analyse et optimisation des performances des traitements réalisés dans un modem LTE. - Profiling et détermination des
Virtualisation et le hosting. Christophe Lucas <[email protected]> Sébastien Bonnegent <sebastien.bonnegent@insa rouen.fr>
 Christophe Lucas Sébastien Bonnegent ROTOMALUG INSA de Rouen Samedi 17 mars 2007 PLAN 1. Virtualisation 2. Xen 3. VServer 4. Utilisations 5. Cas
Christophe Lucas Sébastien Bonnegent ROTOMALUG INSA de Rouen Samedi 17 mars 2007 PLAN 1. Virtualisation 2. Xen 3. VServer 4. Utilisations 5. Cas
Administration de Parc Informatique TP07 : Installation de Linux Debian
 Institut Galilée L2 Info S1 Année 2012 2013 1 Une machine virtuelle Administration de Parc Informatique TP07 : Installation de Linux Debian Le but du TP est d installer Linux (en l occurrence la distribution
Institut Galilée L2 Info S1 Année 2012 2013 1 Une machine virtuelle Administration de Parc Informatique TP07 : Installation de Linux Debian Le but du TP est d installer Linux (en l occurrence la distribution
MODULE I1. Plan. Introduction. Introduction. Historique. Historique avant 1969. R&T 1ère année. Sylvain MERCHEZ
 MODULE I1 Plan Chapitre 1 Qu'est ce qu'un S.E? Introduction Historique Présentation d'un S.E Les principaux S.E R&T 1ère année Votre environnement Sylvain MERCHEZ Introduction Introduction Rôles et fonctions
MODULE I1 Plan Chapitre 1 Qu'est ce qu'un S.E? Introduction Historique Présentation d'un S.E Les principaux S.E R&T 1ère année Votre environnement Sylvain MERCHEZ Introduction Introduction Rôles et fonctions
Linux embarqué: une alternative à Windows CE?
 embarqué: une alternative à Windows CE? : une alternative à Windows CE Présentation Mangrove Systems Distribution embarqué Perspective WinCe / Questions Mangrove systems Créé en 2001 Soutien Soutien Ministère
embarqué: une alternative à Windows CE? : une alternative à Windows CE Présentation Mangrove Systems Distribution embarqué Perspective WinCe / Questions Mangrove systems Créé en 2001 Soutien Soutien Ministère
Comment configurer Kubuntu
 Comment configurer Kubuntu Configuration du réseau... 1 Configurer votre système Linux sur le réseau...1 Vérifier manuellement l adresse IP...5 Connecter un lecteur réseau distant Windows/Mac grâce au
Comment configurer Kubuntu Configuration du réseau... 1 Configurer votre système Linux sur le réseau...1 Vérifier manuellement l adresse IP...5 Connecter un lecteur réseau distant Windows/Mac grâce au
Commandes Linux. Gestion des fichiers et des répertoires. Gestion des droits. Gestion des imprimantes. Formation Use-IT
 Commandes Linux Gestion des fichiers et des répertoires Lister les fichiers Lister les fichiers cachés Lister les répertoires d un répertoire Lister les fichiers par date Les droits Types de fichier Supprimer
Commandes Linux Gestion des fichiers et des répertoires Lister les fichiers Lister les fichiers cachés Lister les répertoires d un répertoire Lister les fichiers par date Les droits Types de fichier Supprimer
L informatique en BCPST
 L informatique en BCPST Présentation générale Sylvain Pelletier Septembre 2014 Sylvain Pelletier L informatique en BCPST Septembre 2014 1 / 20 Informatique, algorithmique, programmation Utiliser la rapidité
L informatique en BCPST Présentation générale Sylvain Pelletier Septembre 2014 Sylvain Pelletier L informatique en BCPST Septembre 2014 1 / 20 Informatique, algorithmique, programmation Utiliser la rapidité
Institut Supérieure Aux Etudes Technologiques De Nabeul. Département Informatique
 Institut Supérieure Aux Etudes Technologiques De Nabeul Département Informatique Support de Programmation Java Préparé par Mlle Imene Sghaier 2006-2007 Chapitre 1 Introduction au langage de programmation
Institut Supérieure Aux Etudes Technologiques De Nabeul Département Informatique Support de Programmation Java Préparé par Mlle Imene Sghaier 2006-2007 Chapitre 1 Introduction au langage de programmation
Système de Gestion de Fichiers
 Chapitre 2 Système de Gestion de Fichiers Le système de gestion de fichiers est un outil de manipulation des fichiers et de la structure d arborescence des fichiers sur disque et a aussi le rôle sous UNIX
Chapitre 2 Système de Gestion de Fichiers Le système de gestion de fichiers est un outil de manipulation des fichiers et de la structure d arborescence des fichiers sur disque et a aussi le rôle sous UNIX
JOSY VIRTUALISATION 9 ET 10 JUIN 2011 POSTE DE TRAVAIL ET VIRTUALISATION. Sébastien Geiger IPHC
 JOSY VIRTUALISATION 9 ET 10 JUIN 2011 POSTE DE TRAVAIL ET VIRTUALISATION Sommaire Domaines d utilisation Editeurs de solutions de virtualisation Exemples d utilisation à l IPHC Déployer une machine virtuelle
JOSY VIRTUALISATION 9 ET 10 JUIN 2011 POSTE DE TRAVAIL ET VIRTUALISATION Sommaire Domaines d utilisation Editeurs de solutions de virtualisation Exemples d utilisation à l IPHC Déployer une machine virtuelle
Tutorial uclinux ARM7 Development Starter Kit. Pragmatec Produits et services dédiés aux systèmes embarqués. uclinux - Mise en oeuvre
 Pragmatec Produits et services dédiés aux systèmes embarqués Tutorial uclinux ARM7 Development Starter Kit 15 Octobre 2006 Rev 1.06 1 / 36 2 / 36 Le kit de développement ARM7 est un kit réalisé par la
Pragmatec Produits et services dédiés aux systèmes embarqués Tutorial uclinux ARM7 Development Starter Kit 15 Octobre 2006 Rev 1.06 1 / 36 2 / 36 Le kit de développement ARM7 est un kit réalisé par la
TD 1 - Installation de système UNIX, partitionnement
 Département des Sciences Informatiques Licence Pro R&S 2009 2010 Administration Système T.T. Dang Ngoc [email protected] TD 1 - Installation de système UNIX, partitionnement 1 Préambule Il existe de très
Département des Sciences Informatiques Licence Pro R&S 2009 2010 Administration Système T.T. Dang Ngoc [email protected] TD 1 - Installation de système UNIX, partitionnement 1 Préambule Il existe de très
Applications Embarquées Critiques
 Applications Embarquées Critiques Jean-Marc Pierson [email protected] Cours DL Jean-Marc Pierson Applications Embarquées Critiques (1/50) Applications Embarquées Critiques: Plan Caractéristiques générales,
Applications Embarquées Critiques Jean-Marc Pierson [email protected] Cours DL Jean-Marc Pierson Applications Embarquées Critiques (1/50) Applications Embarquées Critiques: Plan Caractéristiques générales,
03/04/2007. Tâche 1 Tâche 2 Tâche 3. Système Unix. Time sharing
 3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
Virtualisation CITRIX, MICROSOFT, VMWARE OLIVIER D.
 2013 Virtualisation CITRIX, MICROSOFT, VMWARE OLIVIER D. Table des matières 1 Introduction (Historique / définition)... 3 2 But de la virtualisation... 4 3 Théorie : bases et typologie des solutions techniques...
2013 Virtualisation CITRIX, MICROSOFT, VMWARE OLIVIER D. Table des matières 1 Introduction (Historique / définition)... 3 2 But de la virtualisation... 4 3 Théorie : bases et typologie des solutions techniques...
FOG : Free Open-Source Ghost. Solution libre de clonage et de déploiement de systèmes d'exploitation.
 FOG : Free Open-Source Ghost Solution libre de clonage et de déploiement de systèmes d'exploitation. JoSy-Plume 22 novembre 2010 Logiciel développé par Chuck Syperski et Jian Zhang, IT à l'université "DuPage"
FOG : Free Open-Source Ghost Solution libre de clonage et de déploiement de systèmes d'exploitation. JoSy-Plume 22 novembre 2010 Logiciel développé par Chuck Syperski et Jian Zhang, IT à l'université "DuPage"
Windows XP niveau 2. D. Hourquin, Médiapôle St Ouen l'aumône
 Windows XP niveau 2 Les nouveautés de XP par rapport à 98 Installation, configuration et paramétrage : les fichiers système, la mise à jour, la gestion des périphériques classiques. Maintenance du disque
Windows XP niveau 2 Les nouveautés de XP par rapport à 98 Installation, configuration et paramétrage : les fichiers système, la mise à jour, la gestion des périphériques classiques. Maintenance du disque
Prise en compte des ressources dans les composants logiciels parallèles
 Prise en compte des ressources dans les composants logiciels parallèles Aperçus de l action RASC et du projet Concerto F. Guidec [email protected] Action RASC Plan de cet exposé Contexte Motivations
Prise en compte des ressources dans les composants logiciels parallèles Aperçus de l action RASC et du projet Concerto F. Guidec [email protected] Action RASC Plan de cet exposé Contexte Motivations
Concept de machine virtuelle
 Concept de machine virtuelle Chap. 5: Machine virtuelle Alain Sandoz Semestre été 2007 1 Introduction: Java Virtual Machine Machine Virtuelle Java: qu est-ce que c est? c est la spécification d une machine
Concept de machine virtuelle Chap. 5: Machine virtuelle Alain Sandoz Semestre été 2007 1 Introduction: Java Virtual Machine Machine Virtuelle Java: qu est-ce que c est? c est la spécification d une machine
Linux pour l embarqué. 1 Module E4 : Systèmes temps-réel Audrey Marchand 2005-2006
 Linux pour l embarqué 1 Plan du cours Qu est-ce qu un système embarqué? Les solutions embarquées «classiques» Linux embarqué : une solution attrayante? Les offres Linux embarqué Méthodologie de création
Linux pour l embarqué 1 Plan du cours Qu est-ce qu un système embarqué? Les solutions embarquées «classiques» Linux embarqué : une solution attrayante? Les offres Linux embarqué Méthodologie de création
ORDONNANCEMENT CONJOINT DE TÂCHES ET DE MESSAGES DANS LES RÉSEAUX TEMPS RÉELS 4. QUELQUES EXEMPLES DU DYNAMISME ACTUEL DU TEMPS RÉEL
 i LE TEMPS RÉEL 1. PRÉSENTATION DU TEMPS RÉEL 1.1. APPLICATIONS TEMPS RÉEL 1.2. CONTRAINTES DE TEMPS RÉEL 2. STRUCTURES D'ACCUEIL POUR LE TEMPS RÉEL 2.1. EXÉCUTIFS TEMPS RÉEL 2.2. RÉSEAUX LOCAUX TEMPS
i LE TEMPS RÉEL 1. PRÉSENTATION DU TEMPS RÉEL 1.1. APPLICATIONS TEMPS RÉEL 1.2. CONTRAINTES DE TEMPS RÉEL 2. STRUCTURES D'ACCUEIL POUR LE TEMPS RÉEL 2.1. EXÉCUTIFS TEMPS RÉEL 2.2. RÉSEAUX LOCAUX TEMPS
Modélisation des interfaces matériel/logiciel
 Modélisation des interfaces matériel/logiciel Présenté par Frédéric Pétrot Patrice Gerin Alexandre Chureau Hao Shen Aimen Bouchhima Ahmed Jerraya 1/28 TIMA Laboratory SLS Group 46 Avenue Félix VIALLET
Modélisation des interfaces matériel/logiciel Présenté par Frédéric Pétrot Patrice Gerin Alexandre Chureau Hao Shen Aimen Bouchhima Ahmed Jerraya 1/28 TIMA Laboratory SLS Group 46 Avenue Félix VIALLET
Premiers pas avec VMware Fusion. VMware Fusion pour Mac OS X
 Premiers pas avec VMware Fusion VMware Fusion pour Mac OS X 2 Premiers pas avec VMware Fusion Premiers pas avec VMware Fusion Élément : FR-000371-00 La dernière documentation technique est disponible sur
Premiers pas avec VMware Fusion VMware Fusion pour Mac OS X 2 Premiers pas avec VMware Fusion Premiers pas avec VMware Fusion Élément : FR-000371-00 La dernière documentation technique est disponible sur
Initiation au HPC - Généralités
 Initiation au HPC - Généralités Éric Ramat et Julien Dehos Université du Littoral Côte d Opale M2 Informatique 2 septembre 2015 Éric Ramat et Julien Dehos Initiation au HPC - Généralités 1/49 Plan du cours
Initiation au HPC - Généralités Éric Ramat et Julien Dehos Université du Littoral Côte d Opale M2 Informatique 2 septembre 2015 Éric Ramat et Julien Dehos Initiation au HPC - Généralités 1/49 Plan du cours
Programmation C. Apprendre à développer des programmes simples dans le langage C
 Programmation C Apprendre à développer des programmes simples dans le langage C Notes de cours sont disponibles sur http://astro.u-strasbg.fr/scyon/stusm (attention les majuscules sont importantes) Modalités
Programmation C Apprendre à développer des programmes simples dans le langage C Notes de cours sont disponibles sur http://astro.u-strasbg.fr/scyon/stusm (attention les majuscules sont importantes) Modalités
Virtualisation sous Linux L'age de raison. Daniel Veillard [email protected]
 Virtualisation sous Linux L'age de raison Daniel Veillard [email protected] Solution Linux 2009 Une jungle d'acronymes Xen UML VServer VMWare VirtualBox lguest QEmu KVM VirtualIron OpenVZ LXC Définition
Virtualisation sous Linux L'age de raison Daniel Veillard [email protected] Solution Linux 2009 Une jungle d'acronymes Xen UML VServer VMWare VirtualBox lguest QEmu KVM VirtualIron OpenVZ LXC Définition
Les générations d'ordinateurs de 1945 à nos jours
 Les générations d'ordinateurs de 1945 à nos jours Première génération : (1945-1955) Tubes à vide et tableaux d interrupteurs Au milieu des années 40, «moteurs de calcul» utilisant des relais mécaniques
Les générations d'ordinateurs de 1945 à nos jours Première génération : (1945-1955) Tubes à vide et tableaux d interrupteurs Au milieu des années 40, «moteurs de calcul» utilisant des relais mécaniques
THEME 1 : L ORDINATEUR ET SON ENVIRONNEMENT. Objectifs
 Architecture Matérielle des Systèmes Informatiques. S1 BTS Informatique de Gestion 1 ère année THEME 1 : L ORDINATEUR ET SON ENVIRONNEMENT Dossier 1 L environnement informatique. Objectifs Enumérer et
Architecture Matérielle des Systèmes Informatiques. S1 BTS Informatique de Gestion 1 ère année THEME 1 : L ORDINATEUR ET SON ENVIRONNEMENT Dossier 1 L environnement informatique. Objectifs Enumérer et
CARPE. Documentation Informatique S E T R A. Version 2.00. Août 2013. CARPE (Documentation Informatique) 1
 1") CARPE (Documentation Informatique) 1 CARPE Version 2.00 Août 2013 Documentation Informatique S E T R A Programme CARPE - Manuel informatique de l'utilisateur CARPE (Documentation Informatique) 2 Table
CARPE (Documentation Informatique) 1 CARPE Version 2.00 Août 2013 Documentation Informatique S E T R A Programme CARPE - Manuel informatique de l'utilisateur CARPE (Documentation Informatique) 2 Table
Ordonnancement temps réel
 Ordonnancement temps réel [email protected] Version 1.5 Problématique de l ordonnancement temps réel En fonctionnement normal, respecter les contraintes temporelles spécifiées par toutes les tâches
Ordonnancement temps réel [email protected] Version 1.5 Problématique de l ordonnancement temps réel En fonctionnement normal, respecter les contraintes temporelles spécifiées par toutes les tâches
PARAGON Disk Wiper. Guide de l utilisateur. Paragon Technology GmbH, System Programmierung. Copyright Paragon Technology GmbH
 PARAGON Disk Wiper Guide de l utilisateur Paragon Technology GmbH, System Programmierung Copyright Paragon Technology GmbH Publié par : Paragon Technology GmbH System Programming Pearl-Str. 1 D-79426 Buggingen
PARAGON Disk Wiper Guide de l utilisateur Paragon Technology GmbH, System Programmierung Copyright Paragon Technology GmbH Publié par : Paragon Technology GmbH System Programming Pearl-Str. 1 D-79426 Buggingen
Linux et le Shell. Francois BAYART. Atelier du samedi 20 Novembre 2010 http://www.loligrub.be
 Linux et le Shell Francois BAYART Atelier du samedi 20 Novembre 2010 http://www.loligrub.be 1 Le «système» 2 FHS http://fr.wikipedia.org/wiki/filesystem_hierarchy_standard Filesystem Hierarchy Standard
Linux et le Shell Francois BAYART Atelier du samedi 20 Novembre 2010 http://www.loligrub.be 1 Le «système» 2 FHS http://fr.wikipedia.org/wiki/filesystem_hierarchy_standard Filesystem Hierarchy Standard
Leçon 1 : Les principaux composants d un ordinateur
 Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Plan de la conférence. Virtualization. Définition. Historique. Technique. Abstraction matérielle
 Plan de la conférence Virtualization Microclub 7 mars 2008 Yves Masur - quelques définitions - technique utilisée - exemples d'émulations - la virtualisation x86 - VMWare - mise en oeuvre - conclusion
Plan de la conférence Virtualization Microclub 7 mars 2008 Yves Masur - quelques définitions - technique utilisée - exemples d'émulations - la virtualisation x86 - VMWare - mise en oeuvre - conclusion
NON URGENTE TEMPORAIRE DEFINITIVE OBJET : RÉCUPÉRATION DES DONNÉES CLIENT SUR DISQUE DUR DÉFECTUEUX OU INVALIDÉ
 COMMUNICATION TECHNIQUE N TC0536 Ed. 01 OmniPCX Enterprise Nb de pages : 11 Date : 12-03-2004 URGENTE NON URGENTE TEMPORAIRE DEFINITIVE OBJET : RÉCUPÉRATION DES DONNÉES CLIENT Cette communication technique
COMMUNICATION TECHNIQUE N TC0536 Ed. 01 OmniPCX Enterprise Nb de pages : 11 Date : 12-03-2004 URGENTE NON URGENTE TEMPORAIRE DEFINITIVE OBJET : RÉCUPÉRATION DES DONNÉES CLIENT Cette communication technique
Alexandre Buge Epitech 5 Promo 2004. Soutenance de stage du 01/03/2004 au 31/08/2004
 Alexandre Buge Epitech 5 Promo 2004 Soutenance de stage du 01/03/2004 au 31/08/2004 15 Septembre 2004 Sommaire 1 Introduction : présentation de l entreprise 2 Développement au sein de Skyrecon Les API
Alexandre Buge Epitech 5 Promo 2004 Soutenance de stage du 01/03/2004 au 31/08/2004 15 Septembre 2004 Sommaire 1 Introduction : présentation de l entreprise 2 Développement au sein de Skyrecon Les API
Guide d'installation de la base de données ORACLE 10g (10.2.0.1) pour linux FEDORA CORE 4.
 pour linux FEDORA CORE 4.") Guide d'installation de la base de données ORACLE 10g (10.2.0.1) pour linux FEDORA CORE 4. 1 - Quelques informations à propos de ce guide Ce guide décrit comment installer la base de données Oracle 10g
Guide d'installation de la base de données ORACLE 10g (10.2.0.1) pour linux FEDORA CORE 4. 1 - Quelques informations à propos de ce guide Ce guide décrit comment installer la base de données Oracle 10g
Retrouver de vieux programmes et jouer sur VirtualBox
 CHAPITRE 3 Retrouver de vieux programmes et jouer sur VirtualBox Ce chapitre présente des notions avancées de VirtualBox. Elles permettront de réaliser des configurations spécifiques pour évaluer des systèmes
CHAPITRE 3 Retrouver de vieux programmes et jouer sur VirtualBox Ce chapitre présente des notions avancées de VirtualBox. Elles permettront de réaliser des configurations spécifiques pour évaluer des systèmes
Formation Technicien Supérieur de Support en Informatique T2SI. Le module LINUX. Session 2012-2013 J04 Version 01
 Formation Technicien Supérieur de Support en Informatique T2SI Le module LINUX Session 2012-2013 J04 Version 01 Christian DELAIR [email protected] GRETA / GITA Formation continue au Lycée polyvalent
Formation Technicien Supérieur de Support en Informatique T2SI Le module LINUX Session 2012-2013 J04 Version 01 Christian DELAIR [email protected] GRETA / GITA Formation continue au Lycée polyvalent
Synchro et Threads Java TM
 Synchro et Threads Java TM NICOD JEAN-MARC Master 2 Informatique Université de Franche-Comté UFR des Sciences et Techniques septembre 2008 NICOD JEAN-MARC Synchro et Threads avec Java TM 1 / 32 Sommaire
Synchro et Threads Java TM NICOD JEAN-MARC Master 2 Informatique Université de Franche-Comté UFR des Sciences et Techniques septembre 2008 NICOD JEAN-MARC Synchro et Threads avec Java TM 1 / 32 Sommaire
VMWare Infrastructure 3
 Ingénieurs 2000 Filière Informatique et réseaux Université de Marne-la-Vallée VMWare Infrastructure 3 Exposé système et nouvelles technologies réseau. Christophe KELLER Sommaire Sommaire... 2 Introduction...
Ingénieurs 2000 Filière Informatique et réseaux Université de Marne-la-Vallée VMWare Infrastructure 3 Exposé système et nouvelles technologies réseau. Christophe KELLER Sommaire Sommaire... 2 Introduction...
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
INITIATION AU LANGAGE JAVA
 INITIATION AU LANGAGE JAVA I. Présentation 1.1 Historique : Au début des années 90, Sun travaillait sur un projet visant à concevoir des logiciels simples et performants exécutés dans des PDA (Personnal
INITIATION AU LANGAGE JAVA I. Présentation 1.1 Historique : Au début des années 90, Sun travaillait sur un projet visant à concevoir des logiciels simples et performants exécutés dans des PDA (Personnal
Documentation utilisateur, manuel utilisateur MagicSafe Linux. Vous pouvez télécharger la dernière version de ce document à l adresse suivante :
 Documentation utilisateur, manuel utilisateur MagicSafe Linux. Vous pouvez télécharger la dernière version de ce document à l adresse suivante : http://www.hegerys.com/documentation/magicsafe-windows-doc.pdf
Documentation utilisateur, manuel utilisateur MagicSafe Linux. Vous pouvez télécharger la dernière version de ce document à l adresse suivante : http://www.hegerys.com/documentation/magicsafe-windows-doc.pdf
Partie 7 : Gestion de la mémoire
 INF3600+INF2610 Automne 2006 Partie 7 : Gestion de la mémoire Exercice 1 : Considérez un système disposant de 16 MO de mémoire physique réservée aux processus utilisateur. La mémoire est composée de cases
INF3600+INF2610 Automne 2006 Partie 7 : Gestion de la mémoire Exercice 1 : Considérez un système disposant de 16 MO de mémoire physique réservée aux processus utilisateur. La mémoire est composée de cases
Comment travailler avec les logiciels Open Source
 Conférence / Débat C. Charreyre Comment travailler avec les logiciels Open Source Conférence / Débat - RTS 2008-3 Avril 2008 1 Licence Paternité-Pas d'utilisation Commerciale-Partage des Conditions Initiales
Conférence / Débat C. Charreyre Comment travailler avec les logiciels Open Source Conférence / Débat - RTS 2008-3 Avril 2008 1 Licence Paternité-Pas d'utilisation Commerciale-Partage des Conditions Initiales
Amiens 2007. Métier 39 : Gestion des réseaux informatiques. Jour 2, première partie. Durée : 3 heures
 39 èmes Olympiades des Métiers Amiens 2007 Métier 39 : Gestion des réseaux informatiques Jour 2, première partie Durée : 3 heures N ote : La correction de cette épreuve se déroulera tout au long de la
39 èmes Olympiades des Métiers Amiens 2007 Métier 39 : Gestion des réseaux informatiques Jour 2, première partie Durée : 3 heures N ote : La correction de cette épreuve se déroulera tout au long de la
PPE 1 PRISE EN MAIN DE VMWARE VSPHERE 5.5 & CONFIGURATION D UNE MACHINE VIRTUELLE
 PPE 1 PRISE EN MAIN DE VMWARE VSPHERE 5.5 & CONFIGURATION D UNE MACHINE VIRTUELLE Antoine CAMBIEN BTS SIO Option SISR Session 2015 BTS SIO Services Informatiques aux Organisations Session 2014 2015 Nom
PPE 1 PRISE EN MAIN DE VMWARE VSPHERE 5.5 & CONFIGURATION D UNE MACHINE VIRTUELLE Antoine CAMBIEN BTS SIO Option SISR Session 2015 BTS SIO Services Informatiques aux Organisations Session 2014 2015 Nom
http://www.oraplus.blogspot.com Installation Oracle 10g : Installation sur Solaris 10 x86
 Installation Oracle 10g : Installation sur Solaris 10 x86 Avant propos Cette installation a été effectuée sur une version béta 3 de Solaris 10 x86. Une adresse statique a été attribuée sur le serveur Solaris,
Installation Oracle 10g : Installation sur Solaris 10 x86 Avant propos Cette installation a été effectuée sur une version béta 3 de Solaris 10 x86. Une adresse statique a été attribuée sur le serveur Solaris,
Chapitre I Notions de base et outils de travail
 Chapitre I Notions de base et outils de travail Objectifs Connaître les principes fondateurs et l historique du langage Java S informer des principales caractéristiques du langage Java Connaître l environnement
Chapitre I Notions de base et outils de travail Objectifs Connaître les principes fondateurs et l historique du langage Java S informer des principales caractéristiques du langage Java Connaître l environnement
CAHIER DE S CHARGE S Remote Workload Manager
 CAHIER DE S CHARGE S Remote Workload Manager équipe Regis Rouyard (rouyar_r) Jonathan Bouchot (boucho_o) Johan Massin (massin_j) Jacky Rouquette (rouque_j) Yannick Boillon (boillo_o) EPITECH INOVATION
CAHIER DE S CHARGE S Remote Workload Manager équipe Regis Rouyard (rouyar_r) Jonathan Bouchot (boucho_o) Johan Massin (massin_j) Jacky Rouquette (rouque_j) Yannick Boillon (boillo_o) EPITECH INOVATION
Introduction aux systèmes temps réel
 Introduction aux systèmes temps réel Frank Singhoff Bureau C-203 Université de Brest, France LISyC/EA 3883 [email protected] UE applications de l informatique, Université de Brest Page 1/22 Plan du
Introduction aux systèmes temps réel Frank Singhoff Bureau C-203 Université de Brest, France LISyC/EA 3883 [email protected] UE applications de l informatique, Université de Brest Page 1/22 Plan du
Sans trop entrer dans les détails, la démarche IO Model consiste à : Pour cela, Microsoft découpe la maîtrise de l infrastructure en quatre niveaux :
 Windows Server 2008 Les fondations du système... 15 La virtualisation... 16 La sécurité... 18 Le Web... 20 Fonctionnalité disponible dans... 21 Installation et configuration... 22 Installer... 23 Les services
Windows Server 2008 Les fondations du système... 15 La virtualisation... 16 La sécurité... 18 Le Web... 20 Fonctionnalité disponible dans... 21 Installation et configuration... 22 Installer... 23 Les services
-1 - Postes de travail graphiques
 Axel-VNCviewer 1-2 - 3-4 - Postes de travail graphiques L architecture VNC Pourquoi choisir VNC? Le terminal Axel-VNCviewer 14/12/2000-1 - Postes de travail graphiques Plan : 1.1 - Les utilisations principales
Axel-VNCviewer 1-2 - 3-4 - Postes de travail graphiques L architecture VNC Pourquoi choisir VNC? Le terminal Axel-VNCviewer 14/12/2000-1 - Postes de travail graphiques Plan : 1.1 - Les utilisations principales
Windows 7 - Installation du client
 Windows 7 - Installation du client 1 - Présentation Windows 7 est un système d exploitation client basé sur le noyau NT 6.1, disponible en six versions, commercialisé depuis octobre 2009. Résumé des fonctionnalités
Windows 7 - Installation du client 1 - Présentation Windows 7 est un système d exploitation client basé sur le noyau NT 6.1, disponible en six versions, commercialisé depuis octobre 2009. Résumé des fonctionnalités