Bureau d étude Electronique Automobile
|
|
|
- Laure Dumais
- il y a 10 ans
- Total affichages :
Transcription


1 Bureau d étude Electronique Automobile Alexandre Boyer Patrick Tounsi Octobre 2013

2 Contenu I - Contexte...3 II - Objectifs du bureau d étude...5 III - Enoncé du BE Cahier des charges Présentation générale du projet Cahier des charges...7 a. Exigences fonctionnelles...7 b. Exigences sur le BCM...7 c. Exigences sur le LCM...7 d. Exigences sur la communication CAN...8 e. Exigences Basse consommation...9 f. Exigences sur la surveillance de l alimentation g. Exigences en terme de diagnostic des charges h. Exigences CEM i. Exigences Safety IV - Organisation et Planning V - Notation VI - Annexe 1 Format des documents à rendre Spécification matérielle Spécification logicielle Rapport d avancement et de test VII - Annexe 2 Présentation du matériel Les maquettes a. Module phare directionnel Les cartes électroniques a. MC33984 Dual High side switch b. Kit de développement TRKMPC5604B Carte d interface VIII - Annexe 3 - Prise en main du matériel Prise en main de la carte MC Prise en main de l outil de programmation Freescale CodeWarrior v5.9 (pour les familles MPC55xx et MPC56xx) Exemples de codes sources - Librairie

3 I - Contexte Dans les véhicules actuels sont embarqués de nombreux composants électroniques (microcontrôleur, capteur, actionneur de puissance, ) permettant d améliorer la fiabilité du système, la sécurité et le confort des passagers et le rendement énergétique. La mise en place et l optimisation de tous ces organes électroniques à l intérieur d un véhicule nécessite un savoir faire large en électronique (analogique, numérique, puissance) et en informatique matérielle. La figure ci-dessous décrit l architecture typique d une application automobile. Capteur Acquisition Microcontrôleur Acquisition Commande manuelle réseau Microcontrôleur Contrôleur central Bus de communication Ex : bus CAN Microcontrôleur Pilotage des actionneurs Contrôle/Acquisition Actionneurs circuit puissance Charge (Moteur, lampe, ) Alimentation de la charge Une charge (lampe, moteur) est pilotée par un actionneur capable de délivrer le courant nominal absorbé par la charge. Ce circuit de puissance est lui-même commandé par un microcontrôleur. Les circuits de puissance utilisés dans l industrie automobile ne sont pas de simples commutateurs de puissances puisqu ils intègrent aussi toute une partie logique de contrôle, disposent de plusieurs modes de fonctionnement et renvoient de nombreuses informations comme la température ou le courant débité. L actionnement des charges dépend des informations acquises et envoyées par un ensemble de capteurs aux organes de contrôle. Tous ces organes de contrôle forment un réseau interconnecté par un ou plusieurs bus, comme le bus standard CAN. En raison des exigences économiques, de sûreté de fonctionnement et de robustesse, le processus de conception d une application automobile suit souvent un cycle particulier, appelé cycle en V, décrit à la figure ci-dessous. Ce cycle de conception a pour objectifs de faciliter l élaboration d un produit final à partir de spécifications client, vérifier la cohérence et le respect des spécifications client à chaque étape et le «debug» des problèmes. Dans le cadre du développement d une application électronique automobile, les différentes étapes sont : 1. Exigences équipementiers : A partir des exigences ou spécifications client, l équipementier définit son propre cahier des charges. Le cahier des charges contient des exigences fonctionnelles et des contraintes auxquelles doit répondre l application. 2. Exigences systèmes par discipline : les exigences en différentes disciplines : logicielle (code embarqué), électronique (conception carte et choix composants) et mécanique. Il est nécessaire de s assurer que les exigences systèmes doivent se conformer aux exigences de la phase 1. Dans le cadre de ce BE, nous mettrons l accent sur la 3

4 conception du code embarqué en fonction des exigences électroniques et fonctionnelles du système. Customer requirements Final delivery Time 1. Supplier requirements 2. System requirements per disciplines Satisfy? 3. Software architecture requirements (modules) Satisfy? Satisfy? Verify? Verify? Verify? 7. ITS/VTS 9. Vehicle test 8. System tests 4. Design report Verify? 6. Module tests Detail Level 5. Coding 3. Exigences d architecture logicielle : l analyse des exigences logicielles permet de proposer l architecture de l application logicielle, décomposée en modules. Les exigences logicielles sont décrites dans un rapport. Il est nécessaire de s assurer que les exigences systèmes se conforment aux exigences de la phase précédente. 4. Exigence design : Chaque module est décomposé en fonctions. Il est nécessaire de s assurer que les exigences systèmes se conforment aux exigences de la phase 3. Les tests modulaires peuvent être définis à cette étape (pas leur mise en œuvre). 5. Codage : Il s agit de l écriture proprement dite du code permettant de satisfaire aux exigences de design. Le codage est soumis à un ensemble de recommandations et de contraintes afin d en améliorer la portabilité, la lisibilité, la robustesse 6. Tests modulaires : Chaque fonction doit être testée et validée. Des vecteurs de tests sont choisis afin d obtenir une couverture de test = 100 % et garantir le bon fonctionnement de l application finale. Un rapport est créé qui détaille le test des fonctions. On s assure que toutes les exigences définies en 4 sont respectées. 7. Integration Test Specification (ITS) / Verification Test Specification (VTS) : Le test ITS permet de s assurer la bonne compatibilité entre les modules, leur initialisation correcte, leur bonne communication, la bonne récurrence des fonctions dans le temps. Le test VTS permet de s assurer que les exigences sont respectées. On s assure qu on respecte toutes les exigences définies en Tests système : On vérifie sur l équipement l ensemble du code. On s assure qu on respecte toutes les exigences définies en 2. 4

5 9. Tests véhicule : il s agit du test final avant le livrable pour le client. L organisation de ce bureau d étude suivra ce type de cycle de conception, dans la mesure du temps et du matériel disponible. Le travail réalisé durant les 9 séances de BE s inscrit dans les étapes 3, 4, 5, 6 et 7 de ce cycle de conception. II - Objectifs du bureau d étude Le but de ce bureau d étude est de réaliser une application automobile basé sur l architecture précédente en suivant un processus de développement industriel. L application à réaliser est spécifiée par un cahier des charges définissant non seulement les exigences fonctionnelles, mais aussi les exigences en termes de gestion d énergie, de sûreté (safety), de robustesse du système aux erreurs et aux pannes, de compatibilité électromagnétique (EMC). Pour cela, vous disposez d un ensemble de composants électroniques dédiés aux applications automobiles, fournis par la société Freescale Semiconductor, et des logiciels de programmation associés (Freescale CodeWarrior). Les objectifs du bureau d étude sont les suivants : mettre en place une architecture typique d une application automobile (microcontrôleur, actionneur, charge, bus) développer un projet complet : mise en place du cahier des charges, développement logiciel et mise en œuvre pratique à l aide de composants électroniques proposer des solutions logicielles et matérielles améliorant la sécurité, le confort du conducteur et des passagers, réduisant la consommation d énergie, le risque d erreurs matérielles et logicielles et permettant le diagnostic du système se familiariser aux composants industriels automobiles (microcontrôleur, transceiver CAN, high side switch, superviseur d alimentation) et aux contraintes de ce domaine mettre en réseau l ensemble des composants en utilisant un bus de terrain tel que le bus CAN (Controller Area Network) 5

6 III - Enoncé du BE Cahier des charges 1. Présentation générale du projet Votre équipe est en charge du développement d une application de diagnostic des pannes du système d éclairage avant du véhicule. Cette application est répartie entre plusieurs ECU (Electronic Control Unit) : Le contrôleur habitacle ou Body Controller Module (BCM), qui gère l interface avec l utilisateur et reçoit les informations de diagnostic d autres ECU tels que le Light Control Module. Le contrôleur phare ou Light Control Module (LCM), qui gère l allumage des phares et clignotants, ainsi que la détection de pannes éventuelles. Ces différents modules communiquent sur un réseau CAN (Controller Area Network) ISO La figure ci-dessous décrit l architecture matérielle de l application et l interconnexion entre les différents équipements. VBAT (12 V) Battery Body Control Module (BCM) Light Control Module (LCM) Microcontroller VDD (5 V) RST INT SBC Supervis eur alim CAN interface Vsup 5V_CAN 5V_CAN CAN bus SBC Supervis eur alim CAN interface Vsup VDD (5 V) RST INT Microcontroller Power switch 1 Power switch N Light 1 Light N User button LED indicator LED indicator Votre travail consiste à développer l application gestion fonctionnel et de diagnostic en temps réel, embarquée dans le BCM, le DCM et le LCM. Cette application doit respecter les exigences définies dans le cahier des charges ci-dessous. Votre travail se décompose en différentes parties : 1. Ecrire la spécification de l architecture matérielle et logicielle de l application (voir annexe 1 pour le contenu) 2. Ecrire la spécification logicielle par module (voir annexe 1 pour le contenu) 3. Coder l application 4. Définir des vecteurs de tests, tester et valider chaque module (voir annexe 1 pour le contenu du rapport d avancement et de test) 5. Tester et valider l application complète Vous développerez et testerez vos modules logiciels sur des kits de développement Freescale (voir annexes 2 et 3). Les tests pourront être effectués sur des kits de développement différents. Remarque : Même s il s agit d un travail en binôme, le travail sur la spécification de l application et le test final est un travail de groupe. Le travail par binôme concerne la 6

7 spécification détaillée des modules et leur codage. Une proposition de découpage du travail en binômes et équilibré est recommandée. Des délivrables sont associés aux 5 parties définies ci-dessus (Se reporter à IV. Planning et à V. Notation pour plus de détails sur les délivrables). Les délivrables de spécification devront suivre le format décrit dans l annexe Cahier des charges a. Exigences fonctionnelles Description de la fonction phare et clignotant La commande l allumage/extinction des phares et des clignotants est assurée par : Les commodos situés sur le tableau de bord (on simulera ces commodos les interrupteurs et boutons poussoirs disponibles sur la carte de développement TRK- MPC5604B), actionnés par le conducteur. L action est détectée par le BCM. Si le capteur de luminosité du véhicule détecte une obscurité trop importante, les phares sont mis en marche automatiquement. Ils s éteignent automatiquement dès qu une luminosité suffisante est revenue, sauf si le conducteur a donné l ordre d activation des phares. Vous pourrez simuler le capteur de luminosité par le photorécepteur disponible sur la carte de développement TRK-MPC5604B. Le capteur est connecté au BCM. La commande des phares est assurée par le high side switch MC Le réglage de l intensité des phares se fera par une commande PWM. Vous pourrez limiter votre travail à un seul bloc phare + clignotant. Le choix des entrées-sorties utilisé sur les microcontrôleurs du BCM et LCM est libre mais devra être clairement spécifiée dans le rapport de spécifications. b. Exigences sur le BCM Trois modes de fonctionnement sont proposés pour le BCM : Mode de fonctionnement nominal : La fréquence d horloge du bus système du BCM est fixée à 64 MHz. Elle est fournie par le module FM-PLL à partir d un oscillateur à quartz externe de 8 MHz. La tolérance sur la fréquence du quartz est inférieure à 0.5 %. La modulation de fréquence sera activée (cf. Exigences CEM). Mode de fonctionnement dégradé : Le microcontrôleur rentrera dans ce mode lorsque des problèmes seront détectés sur la tension d alimentation du module BCM (cf. Exigences sur la surveillance de l alimentation et Exigences safety). Mode basse consommation : Cf. Exigences basse consommation. c. Exigences sur le LCM Trois modes de fonctionnement sont proposés pour le LCM : 7

8 Mode de fonctionnement nominal : La fréquence d horloge du bus système du BCM est fixée à 34 MHz. Elle est fournie par le module FM-PLL à partir d un oscillateur à quartz externe de 8 MHz. La tolérance sur la fréquence du quartz est inférieure à 0.5 %. La modulation de fréquence sera activée (cf. Exigences CEM). Mode de fonctionnement dégradé : Le microcontrôleur rentrera dans ce mode lorsque des problèmes seront détectés sur la tension d alimentation du module LCM (cf. Exigences sur la surveillance d alimentation et Exigences safety). Mode basse consommation : Cf. Exigences basse consommation. d. Exigences sur la communication CAN Le module DCM communique avec le module BCM par un bus CAN. La longueur maximale du bus CAN entre le DCM et le BCM est de 5 mètres. La liaison CAN est assurée par une paire bifilaire. Le temps de propagation le long de la paire est de 5 ns/m. Le retard maximal introduit par un contrôleur CAN ou un transceiver CAN est estimé à 25 ns. Exigences sur le débit binaire Le bus CAN fonctionne selon la spécification CAN 2.0B. Le débit binaire doit être supérieur à 1 Mbits/s en mode de fonctionnement nominal. Il sera ramené à 125 Kbits/s en mode dégradé. Exigences sur le format des trames CAN Le Standard CAN 2.0B est utilisé. Seules des trames de données sont transmises. Les remote frames ne sont pas utilisées. Les données sont transmises par paquet de 8 octets. Le choix des identifiants doit se conformer au format suivant : Sujet du message Source du message MSB LSB 11 bits 18 bits Identificateur 29 bits L adresse (source du message) donnée au BCM sera 0x Celle pour le DCM sera 0x20000 et celle pour le LCM sera 0x Gestion de la consommation d énergie Cf. Exigences basse consommation. Lorsque les microcontrôleurs entreront en mode basse consommation, les contrôleurs CAN entreront en mode Disable. Les interfaces CAN entreront en mode Sleep. Ceux-ci sortiront des modes basse consommation soit par demande du microcontrôleur, soit par requête sur le bus CAN. Un pattern correspondant à 3 impulsions à l état dominant sera utilisé pour réveiller les interfaces CAN. Une impulsion sur la ligne INT indiquera la sortie du mode Sleep de l interface CAN. 8
. Mode basse consommation : Cf. Exigences basse consommation. d. Exigences sur la communication CAN Le module DCM communique avec le module BCM par un bus CAN.")
9 Gestion des erreurs de transmission et de réception sur le bus CAN Dans le cas d erreurs de transmission ou de réception, seules les entrées et les sorties de l état Bus Off sont repérées. Pour le BCM, la sortie de l état Bus Off se fait par une requête du contrôleur, après l entrée dans l état Bus Off. Après 5 entrées consécutives dans l état Bus Off, une erreur est affichée sur le tableau de bord et la demande en cours est abandonnée. Pour le DCM et le LCM, la sortie de l état Bus Off est automatique (selon la spécification du protocole CAN 2.0B : 128 occurrences de 29 bits récessifs). Inactivité sur le bus CAN Si un contrôleur CAN ne transmet rien pendant plus de 2 secondes, celui-ci devra passer en mode Listen Only. L interface CAN passera en mode Receive Only. Gestion des problèmes matérielles sur le bus CAN Le SBC intègre une interface CAN capable de détecter des problèmes électriques sur le bus CAN, sur les broches Rx et Tx et une surtempétaure de l interface CAN. En cas de problème matériel, l interface CAN enverra une impulsion sur la ligne INT. Le microcontrôleur détectera l origine du problème et notifiera la présence d une erreur en allumant un indicateur lumineux. L interface CAN sera mise en mode Receive Only, tant que le problème n a pas disparu. Le microcontrôleur cherchera régulièrement à faire revenir l interface CAN en mode d émission/réception normal. En cas de problème relevé sur l alimentation 5V_CAN, la même procédure sera appliquée mais l interface CAN passera en mode Sleep. Remarque : le SBC pourra être configuré en mode debug pour faciliter la tache de développement et de test. e. Exigences Basse consommation Modes de consommation des microcontrôleurs Trois modes de consommation d énergie sont définies pour les microcontrôleurs : Mode Run0 : fonctionnement normal. Mode dégradé : en cas d apparition de problème (voir exigences Safety) Mode basse consommation STOP0 : voir détails ci-dessous. Le BCM passe en mode STOP0 si sa période d inactivité dépasse 10 secondes. Il sort de ce mode dans les cas suivants : Un message lui est adressé sur le bus CAN L utilisateur appuie sur une commande d allumage de phare Un problème matériel est détecté par le superviseur d alimentation ou l interface CAN (signal INT) Une condition de faible luminosité est détectée Avant d entrer en mode STOP0, le microcontrôleur s assurer que l interface CAN est entrée en mode Sleep et que le contrôleur CAN est entré en mode Disable. Le LCM passe en mode STOP0 si sa période d inactivité dépasse 10 secondes et si aucun phare n est allumé. Il sort de ce mode dans les cas suivants : Un message lui est adressé sur le bus CAN 9
.")
10 Un problème matériel est détecté par le superviseur d alimentation, l interface CAN (signal INT) ou un des drivers de charge Avant d entrer en mode STOP0, le microcontrôleur s assurer que l interface CAN est entrée en mode Sleep, que le contrôleur CAN est entré en mode Disable et que les drivers de charge (inactifs) sont entrés en mode Sleep. f. Exigences sur la surveillance de l alimentation L alimentation du BCM et du LCM est issue de la batterie Vbat. Le superviseur d alimentation (SBC) fournit une alimentation 5 V (Vdd) régulée au microcontrôleur. Le SBC surveille la qualité de ces différentes alimentations (surtension, soustension, présence d impulsions parasites, load dump, crank phase). En fonction de la tension mesurée par le SBC, plusieurs scénarios sont prévus (voir datasheet SBC MC33905 pour plus d informations sur les différentes tensions mesurées par le SBC) : Si la tension Vsense devient inférieure à 8.6 V ou si la tension Vsup devient inférieure à 6 V, le SBC envoie une impulsion sur la ligne INT. Le microcontrôleur vérifie la valeur de la tension batterie (Vsense) et notifie ou non le risque de tension de batterie faible en allumant un indicateur lumineux. Les microcontrôleurs des BCM et LCM passent ensuite en mode de fonctionnement dégradé. Si la tension d alimentation Vdd du microcontrôleur est comprise entre 3.5 et 4.5 V, le SBC envoie une impulsion sur la ligne INT. Le microcontrôleur notifie ou non le risque de tension de batterie faible en allumant un indicateur lumineux et les microcontrôleurs des BCM et LCM passent en mode de fonctionnement dégradé. Si la tension d alimentation Vdd du microcontrôleur devient inférieure à 3.5 V, les microcontrôleurs sont mis en reset. Si la tension Vsup est inférieure à 4 V (crank phase), la tension Vdd délivrée par le SBC est désactivée. Si un problème est relevé sur la tension d alimentation 5V_CAN de l interface CAN (overcurrent, underevoltage, overtemperature), celle-ci passe en mode Sleep jusqu à ce que le problème disparaisse. g. Exigences en terme de diagnostic des charges Le module LCM vérifie l état des switches de puissance et fait remonter toute défaillance au BCM (overtemperature, overcurrent, overvoltage, open load). La détection d un surcourant est déterminée par un seuil bas fixé à 20 A et un seuil haut fixé à 75 A. Lorsque le courant dépasse le seuil bas pendant plus de 10 ms, la sortie de puissance correspondante est inhibée. Dès qu un problème est signalé sur un switch, un indicateur lumineux indique la nature du problème et la commande du switch est coupée jusqu à ce que le problème disparaisse. Lorsque le problème a disparu, le DCM ou le LCM transmet au BCM un message indiquant le recouvrement de la panne. Le BCM peut demander des diagnostics sur les switches de puissance contrôlés par le DCM, ainsi qu un relevé du courant moyen consommé pendant une période donnée. 10
 fournit une alimentation 5 V (Vdd) régulée au microcontrôleur.")
11 h. Exigences CEM Afin de réduire les émissions électromagnétiques parasites, la modulation FM de la PLL de chaque microcontrôleur sera activée. Celle-ci sera réglée afin de minimiser l émission électromagnétique et ne pas provoquer de problème de synchronisation du bus CAN. Toutes les sorties digitales du microcontrôleur, les sorties CAN_H et CAN_L des interfaces CAN et les sorties de puissance seront configurés en mode «slow slew rate». i. Exigences Safety Lorsque des problèmes d alimentation seront rencontrés (cf. Exigences sur la surveillance de l alimentation), les microcontrôleurs passeront en mode dégradé, afin de limiter leur consommation en courant. Les PLL seront désactivés et l horloge système sera directement fournie par l oscillateur à quartz externe. Le bus CAN fonctionnera à 125 kbits/s. Un indicateur lumineux signalera l entrée en mode de fonctionnement dégradé. Un watchdog interne aux microcontrôleurs assurera un reset en moins de 50 ms en cas de problème logiciel. 11
, les microcontrôleurs passeront en mode dégradé, afin de limiter leur consommation en courant.")
12 IV - Organisation et Planning Un groupe de TP travaille ensemble au développement de l application. Le groupe travaille à la spécification logicielle de l application et à sa validation. Au sein de chaque groupe, le travail est divisé en binôme. Le travail de spécification, de codage et de test de chaque module de l architecture logicielle est réparti entre les différents binômes. La répartition de ce travail est libre mais doit rester équilibrée. La notation par binôme dépendra du travail effectuée. Le tableau ci-dessous décrit le déroulement des séances. Les deux premières séances sont dédiées à la spécification matérielle et logicielle de l application et des différents modules. A l issue de ces 2 séances, le groupe doit fournir un document de spécifications logicielle et matérielle de l application, chaque binôme fournit la spécification du ou des modules dont il a la charge. Le travail de programmation ne pourra démarrer qu une fois la spécification logicielle établie et transmise aux enseignants. Les séances 3 à 9 seront dédiées à la programmation et aux tests des modules et de l application finale. A l issue de la 9 e séance, les différents binômes rendent un rapport d avancement et de test ainsi que leurs codes sources compilables et commentés. Une soutenance sera organisée. Chaque binôme aura 10 minutes pour présenter le travail effectué, les solutions retenues et les résultats obtenus. Séance Description 1 2 Spécification de l architecture logicielle et matérielle de l application et des différents modules Fin séance 2 Rapport de spécification logicielle et matérielle de l application (par groupe) et des modules (par binômes). 4 9 Codage et tests des modules et des applications Fin séance 9 Soutenance orale Rapport d avancement et de tests des modules et de l application (par binôme). Présentation du travail effectué, les solutions retenues et les résultats obtenus. (par binôme) Pour toute question technique portant sur les composants Freecale, envoyez les par aux encadrants de TP : [email protected] et [email protected]. V - Notation La notation portera sur les rapports techniques rédigés par groupe et par binôme, ainsi que sur l évaluation orale. La répartition de la note est la suivante : 1/3 pour le travail de spécification 1/3 pour l évaluation orale 1/3 pour le rapport d avancement et de tests 12

13 Conseils pour les rapports de spécifications, de codage et de tests : Présenter le projet de manière synthétique et claire. Ce n est pas la quantité de pages qui compte. Utiliser des outils graphiques adaptés, facilitant la compréhension de vos algorithmes et le codage des applications (voir annexe 1). Décrire l architecture matérielle en faisant apparaître les branchements entre les différentes cartes, les entrées-sorties utilisées, les types de signaux, les fréquences, les niveaux de tension, les débits binaires, les options d entrée-sortie (pull-up, pulldown ). Toute entrée-sortie dont le statut n est pas détaillé rend la spécification matérielle imprécise (voir annexe 1). Décrire les solutions apportées pour respecter les contraintes fonctionnelles, de sécurité, de dimensionnement du bus CAN et de gestion de l énergie. Les codes sources doivent être suffisamment et correctement documentés. le code source, des commentaires doivent être associés à chaque fonction et indiquer : le rôle de la fonction, les variables d entrées et de sorties. A l issue du projet, un rapport d avancement et de test vous est demandé. Celui-ci doit montrer quelles exigences ont pu être pris en compte durant votre travail et si elles ont été respectées (voir annexe 1). 13
. Toute entrée-sortie dont le statut n est pas détaillé rend la spécification matérielle imprécise (voir annexe 1).")
14 VI - Annexe 1 Format des documents à rendre Un des objectifs derrière les différents rapports qui vous sont demandés est l écriture de rapport technique professionnel. Ces rapports ont un but précis : spécification matérielle, logicielle et test. Quelques conseils pour l écriture des rapports : Le rapport doit être synthétique et précis. Ce n est pas la quantité de pages qui comptent, mais la rigueur du document. Utilisez un style «professionnel». N hésitez pas à synthétiser les informations par des tableaux et des schémas clairs et adaptés. Utilisez un format unique et lisible pour vos rapports. 1. Spécification matérielle Fournir un schéma de câblage électrique des différents ECU, faisant apparaître l ensemble des broches utilisées sur les différents microcontrôleurs et switches de puissance. Lister dans un tableau les caractéristiques des entrées-sorties utilisées sur les microcontrôleurs, avec leurs caractéristiques : Type : entrée ou sortie digitale, PWM, entrée analogique, CAN TX ou RX, entrée quartz Option : pull-up, pull-down, open drain Détaillez la source des signaux d horloge système et leur fréquence Donnez pour les entrées-analogiques la resolution de la conversion, la fréquence de conversion Pour les bus, donnez le débit binaire Pour les sorties PWM, donnez les caractéristiques du signal Tensions d alimentation des différents composants 2. Spécification logicielle L application que vous allez coder provient du cahier des charges du client. Avant de coder une application, il convient de traduire les spécifications du client en un algorithme et de s assurer que cet algorithme répond aux spécifications du client. La spécification logicielle de l application que vous allez coder doit se faire à 2 niveaux : la spécification de l architecture logicielle, qui fait apparaître les différents modules composant l application et leurs interactions la spécification de chaque module, qui détaille les fonctions de chaque module Cette spécification vous permettra de définir votre algorithme. Pour réaliser cette spécification, différents formats peuvent être utilisés : texte, schéma-bloc, diagramme d état, flowchart Pour bien comprendre ces deux niveaux de spécifications et les différentes descriptions pouvant être employées, nous pouvons illustrer par l exemple de spécification suivant : «Un client souhaite réaliser une application d allumage d une lampe par l appui sur un bouton et en fonction de la luminosité ambiante. La figure ci-dessous illustre l architecture matérielle de l application. La lampe est commandé par un driver de puissance, la commande est de type PWM, la fréquence de la PWM est de 100 Hz, le rapport cyclique de 50 %. La 14

15 lampe s allume lorsqu on appuie sur le bouton poussoir ou si la tension analogique aux bornes du capteur lumineux est inférieure à Vref.» Bouton poussoir BP Capteur lumineux Entrée digitale Entrée analogique Microcontrôleur Sortie digitale Driver de lampe Lampe A partir de la spécification client, il est possible de décomposer l application en plusieurs modules fonctionnels, que l on peut décrire sous forme de texte (la fonction du module, les entrées-sorties, les contraintes ) : Module «Détection_Appui_BP» : ce module détecte l appui sur le bouton poussoir et transmet l état du bouton poussoir. Module «Détection_obscurité» : ce module détecte si la luminosité ambiante passe sous le seuil (Vcapteur < Vref) et transmet l état de lumineux ambiant. Module «Commande_lampe» : ce module décide de l allumage de la lampe, en autorisant la commande PWM. Module «PWM_lampe» : ce module génère la commande PWM de la lampe à partir des paramètres de fréquence et de rapport cyclique, si le module Commande_lampe a donné son autorisation. Chacun de ces modules peut aussi être décrit de manière un peu plus précise. La description d une application ou d un module sous forme de texte est certes générale, mais elle reste surtout adaptée à une description fonctionnelle. Elle n est pas la plus adaptée à la description de l architecture en module ou du séquencement des actions. D autres outils sont plus adaptés : Schéma-bloc ou schéma fonctionnel : Il s agit d une représentation graphique d un processus complexe présentant plusieurs unités. Le schéma fait apparaître les différents blocs du système, leurs entrées-sorties et les lignes d action. La figure ci-dessous propose un schéma-bloc de l application précédente et fait apparaître les 4 modules et leurs interactions. Ces différents modules pourront être traduits par une ou plusieurs fonctions. 15

16 Digital_In Bouton poussoir Détection_ Appui_BP Etat_BP Vcapteur Capteur lumineux Détection_ obscurité Etat_lum Commande_lampe En_PWM PWM_lampe PWM_command Lampe Diagramme d état : Le diagramme d état permet de représenter les différents états pris par une machine à états finis et les conditions à remplir pour passer d un état à un autre (transition). Un diagramme d état présente l avantage d être directement traduisible sous la forme d un algorithme. Par exemple, voici le diagramme d état du module Détection_Appui_BP : Départ Intialisation Front montant sur Digital_In État_BP = 0 État_BP = 1 Application éteinte Fin Flowchart ou algorigramme : Front descendant sur Digital_In Le flowchart permet de représenter graphiquement l enchainement des opérations. Comme le diagramme d état, il est traduisible sous la forme d un algorithme. La figure ci-dessous présente le flowchart de l application : 16

17 Start Initialisation Etat_BP = 0 Etat_lum=0 En_PWM = 0 Etat_BP = 1? no yes En_PWM = 1 Etat_lum = 1? yes no Etat_BP = 1? no yes Etat_lum = 1? no yes En_PWM = 0 Dans le cadre de ce BE, il n y a pas d obligation à utiliser ces différentes formes de description pour spécifier l architecture logicielle que vous allez spécifier. Néanmoins, elles vous permettront de faciliter la création de vos algorithmes, la validation de vos spécifications par rapport à la spécification du client, le debug, la collaboration entre les différents groupes de travail. 3. Rapport d avancement et de test Le but de ce rapport final est de permettre l évaluation de l avancement du projet (qu est-ce qui a été fait? qu est-ce qui a été validé? qu est-ce qui est en cours? ) et l adéquation avec le cahier des charges initial. Celui-ci est à rendre par binôme. Le rapport d avancement sevra se présenter sous la forme d un tableau (Excel par exemple) listant l ensemble des spécifications et des modules fonctionnels qui concernent un binôme. A chaque ligne on trouvera : une description succincte d une spécification ou d un module fonctionnel (exemple : Configuration horloge système : activation d une PLL à 64 MHz) un statut donnant l avancement de la tâche de développement d un module fonctionnel ou de vérification d une spécification : Fait, non fait, en cours, abandonné état de la validation : test conforme, test non conforme, test non effectué. Le résultat de tout test devra être présenté dans un document annexe. Indiquez comment retrouver le résultat de test (page d un document, n de figure, nom de fichiers ). La validation de tout module fonctionnel ou toute spécification fera appel à un ou plusieurs tests matériels (mesure à l oscilloscope, multimètre ) ou logiciels (changement d état binaire dans un registre, mesure de temps de cycle ). Ceux-ci devront être détaillés dans un 17

18 rapport annexe au rapport d avancement. Le résultat des tests devra être présenté et commenté de manière succincte (le résultat attendu, le résultat obtenu). Le format de ce document est libre. Celui-ci doit rester synthétique. 18
. Le format de ce document est libre.")
19 VII - Annexe 2 Présentation du matériel Dans ce BE, nous disposons de plusieurs maquettes, de composants dédiés automobile fournis par la société Freescale Semiconductor, et de cartes d interface. Les notes d application des différents composants vous sont fournies. L ensemble des documents sont disponibles sur le site 1. Les maquettes Six maquettes dédiées à une application automobile sont proposées. Elles sont présentées cidessous accompagnées de leurs fiches signalétiques. a. Module phare directionnel 2. Les cartes électroniques Plusieurs cartes d évaluation sont fournies par la société Freescale Semiconductor dans le cadre du BE automobile. L interfaçage entre les différentes cartes sera assuré par une carte spécifique. a. MC33984 Dual High side switch Ce composant intègre 2 commutateurs de puissance de type high side switchs et leurs diodes de protection, ainsi que toute la partie logique d interfaçage avec un contrôleur externe. Ce composant peut être piloté à l aide du protocole SPI ou directement en PWM. Remarque : A noter que la communication via SPI permet d avoir accès à un plus grand nombre d informations sur le statut du composant. Ce composant peut faire passer un fort courant (jusqu à 30 A en DC!). Il propose en plus une sortie analogique (CSNS) renseignant sur le courant de sortie permettant ainsi de mettre en place une boucle de courant. La présence d une résistance entre CSNS et la masse est nécessaire pour assurer une conversion courant tension. Le composant propose aussi une sortie logique Fault Status indiquant des conditions de fonctionnement anormales (sous tension, sur courant, surchauffe). Comme la plupart des composants automobiles, il possède plusieurs modes de fonctionnement permettant de réduire la consommation en énergie : mode normal ou mode sleep. Il est monté sur une carte de développement KIT33981BPNAEVB, présentée sur la figure ci-dessous. 19

20 Fiche signalétique : Alimentation : 6 27 V (on travaillera sous 12 V) Courant DC max : 30 A (attention au cas du rotor bloqué) Fréquence max PWM : 300 Hz Signaux de commandes compatibles TTL/CMOS 5 V Pour plus de détails, se reporter à la datasheet du composant et de la carte de développement KIT33984PNAEVB ( b. Kit de développement TRKMPC5604B Le kit de développement propose le microcontrôleur MPC5604B (Bolero) dans sa version LQ monté dans un boîtier LQFP 144. Cette carte relativement simple intègre le module de programmation/debug in-situ USB OSBDM. Il peut être alimenté soit par port USB, soit par une alimentation externe DC 9-12 V. L alimentation on-board peut être régulée par un régulateur 5 V ou par un superviseur d alimentation de type System Basis Chip (SBC) (MC33905). Ce composant gère l alimentation de la carte de développement et intègre une interface CAN. La sélection de l alimentation de la carte de développement se fait par le jumper J1. Un quartz de 8 MHz fournit la référence d horloge au composant. Sur cette carte, on trouve : 4 LEDs connectées aux pins PE4 à PE7 4 switchs connectés aux pins PG6 à PG9 4 boutons poussoirs connectés aux pins PE0 et PE3 1 bouton poussoir de reset un potentiomètre connecté à l entrée de conversion analogique numérique ANP0 (pin PB4) une cellule photovoltaïque connectée à l entrée de conversion analogique numérique ANP1 (pin PB5) un connecteur Sub-D9 (JP3) connecté à une interface CAN Toutes les broches des ports du microcontrôleur (PORTA PORTH) sont accessibles à travers les connecteurs P1 à P8. Vous pouvez vous reporter au document TRK_MPC5604B_Rev_B_Schematic_Layout.pdf pour avoir la schématique détaillée de la carte de développement, et au document TRKMPC5604BEVBUM.pdf pour plus de détails sur les positions des jumpers. 20

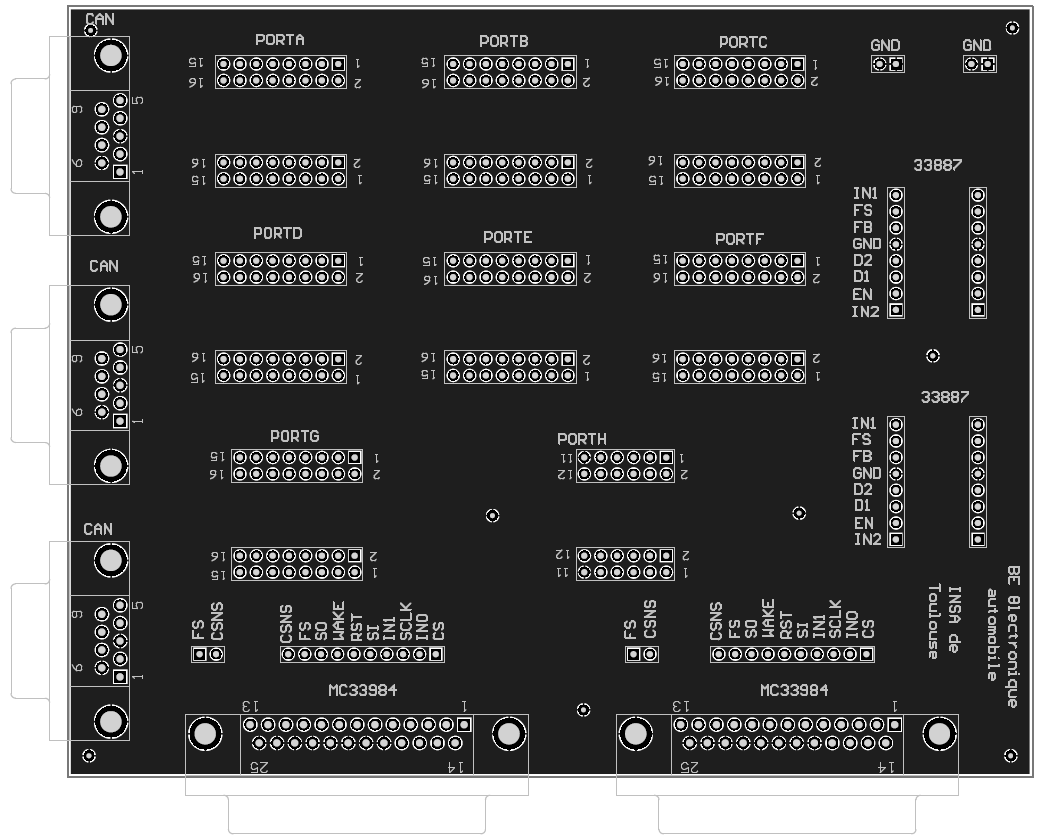
21 Alimentation 9 12 V USB (debug + alimentation) Connexion Bus CAN SBC + Interface CAN (MC33905) PORTA PORTH LEDs Switches Boutons poussoirs Potentiomètre MPC 5604B Bouton RESET 3. Carte d interface La carte TRKMPC5604B représente l élément central de chaque application. Afin de la connecter aux différentes cartes de puissance et aux autres cartes microcontrôleur par bus CAN, une carte d interface a été développée. Celle-ci est présentée ci-dessous. Les signaux provenant de la carte TRKMPC5604B proviennent des 8 connecteurs 2*8 ou 2*6, appelés PORTA PORTH. Différents types de connecteurs sont utilisés pour se connecter aux cartes de puissance. En face de chaque broche des différents connecteurs de la carte sont placés des connecteurs tulipe. Ainsi, les interconnections entre cartes peuvent être réalisées manuellement en plaçant des fils entre les connecteurs tulipes. L assignation des broches du MPC5604B est donc laissée libre. Les indications sur les connecteurs et le sens de connexion sont reportées sur les cartes. Remarque 1 : il est de votre responsabilité de veiller à ne pas faire de mauvaise connexion (exemple : court-circuiter une alimentation à la masse, connecter une sortie de puissance 12 V sur une entrée digitale). Remarque 2 : si vous connectez le starter kit TRKMPC5604B à la carte d interface, vous devez impérativement relier leur masse. Hormis sur le connecteur PORTH, aucune pin des connecteurs PORTA PORTG n est connectée au plan de masse du kit TRKMPC5604B. Plusieurs pins sont disponibles sur le TRKMPC5604B et sur la carte d interface permettant de relier les masses ensembles. Ci-dessous, la vue schématique de la carte d interface (Schematic_interface_TRK_MPC5604B.pdf) et la vue top layer (Top_interface_TRK_MPC5604B.pdf). 21
22 22

23 VIII - Annexe 3 - Prise en main du matériel 1. Prise en main de la carte MC33984 Il est possible de prendre en main cette carte par l intermédiaire du logiciel SPIGEN. Cependant, nous préférons utiliser une approche manuelle, sachant qu il est possible de fixer l état des différents signaux logiques directement sur la carte. La charge utilisée est une lampe. Connecter la lampe sur une des sorties (SA ou SB) Connecter l alimentation sans l allumer (tension 12 V) A l aide de la datasheet de la carte, mettre à 0 ou à 1 les différents signaux logiques de commande. Pour cela, placer correctement les jumpers présents sur la carte Mettre sous tension, plusieurs LEDs sur la carte vous indiquent la mise sous tension du composant et l état de la sortie 2. Prise en main de l outil de programmation Freescale CodeWarrior v5.9 (pour les familles MPC55xx et MPC56xx) L outil Freescale CodeWarrior v5.9 permet de développer les fichiers exécutables qui seront implantés dans le microcontrôleur MPC5604B, mais aussi de réaliser du debug in-situ et d implanter les programmes dans la mémoire flash du composant. Nous allons commencer par décrire comment construire une application à l aide de Code Warrior. Lancer Freescale CodeWarrior IDE v5.9 Construire un nouveau projet. Pour cela, cliquer File>New et sélectionner MPC55xx New Project Wizard. Nommer votre projet, spécifier le chemin d accès des fichiers puis cliquer OK. Le project wizard est lancé et vous aide à construire votre projet en plaçant automatiquement les fichiers utiles (librairies, fichiers de lien, fichiers header, ) dans votre répertoire. Pour cela, différents choix vous sont proposés. D abord, vous devez sélectionner le composant : MPC5604B_M27V (vous retrouvez l indication M27V sur le boîtier du composant). Choisissez ensuite le langage de programmation (assembleur, C, C++). Nous programmerons uniquement en langage C. 23

24 L outil PC-lint ne sera pas utilisé. Le format en virgule flottante (Floating point) ne sera pas utilisé non plus. Cliquer sur Terminer, le projet est créé et l interface suivante s ouvre. Vous n avez plus qu à écrire le code source. Vous pourrez utiliser les exemples de codes sources qui vous sont fournis pour prendre en main l outil. Une fois votre code source écrit, il vous faut le compiler et générer le code exécutable qui sera implanté à l intérieur du microcontrôleur. Pour cela, on utilise les boutons ci-dessous (Compile, Make, Debug). La commande Debug permet de lancer le mode Debug et d implanter le code sur le composant. Pour lancer l écriture en mémoire du code source et le debug in-situ, il faut sélectionner la mémoire à programmer : RAM ou internal Flash. Nous vous suggérons de travailler sur la Flash interne. Cliquez ensuite sur Debug. Si aucune erreur de compilation ou de lien n est détectée, la fenêtre de l outil de debug ICDPPCNexus s ouvre, après vous avoir demandé l autorisation de réécrire la mémoire programme. Vérifiez que l interface sélectionnée est bien USB Multilink, embedded multilink or Embedded OSBDM, puis cliquez sur Connect (Reset). La programmation prend quelques dizaines de secondes. Attendez de voir afficher dans la fenêtre de statut File loaded properly et Use gotil main command to run until main procedure pour lancer le debug in-situ. 24
, d arrêter l exécution et de lancer un reset.")
25 La figure ci-dessous présente les différents volets de l outil de debug in-situ. La barre d outils permet de réaliser différents modes d exécution (run, pas à pas), d arrêter l exécution et de lancer un reset. Plusieurs points d arrêt peuvent être inclus par un double clic dans la fenêtre Code Source au niveau de l instruction où l on souhaite arrêter l exécution. Il est possible de lancer l exécution du programme jusqu au main en tapant dans la barre de commande Gotil main. Barre d outils Statut CPU Contenu mémoire Code source Variables L affichage des variables utilisateurs et du contenu des registres peut se faire dans la fenêtre Variable Window, en cliquant sur les boutons Add Variable et Add Register. En cliquant sur ce bouton la fenêtre ci-dessous s affiche, listant les différents périphériques du microcontrôleur. Une fois le périphérique sélectionné, une liste de tous les registres associés à ce périphérique s affichera. Attention, l outil liste les périphériques de 2 version de microcontrôleur : les versions M07N et M27N. Faites attention de bien sélectionner les registres de la version M27N. Commande Statut 3. Exemples de codes sources - Librairie Afin de prendre en main le microcontrôleur, vous pouvez télécharger la note d application AN2864 «MPC5500 & Simple Cookbook» sur le site de Freescale. Ce document vous propose plusieurs exemples de codes sources pour les microcontrôleurs de la famille MPC5500 et Sur le site vous trouverez aussi quelques exemples de codes sources adaptés au starter kit TRK-MPC5604B (exemples_codes_sources_mpc5604b.zip). Ci-dessous, une liste des programmes fournis dans ce fichiers. exemples_codes_sources_mpc5604b.zip : ADC_CTU_PIT3 : conversion analogique-numérique du signal délivré par le photorécepteur du starter kit TRK-MPC5604B. L acquisition est cadencée via le CTU, par le débordement du timer PIT3. 25
26 CAN_receive : programme basique de configuration du module FlexCAN en réception (CAN1). Le SBC est placé en mode Debug et l interface CAN est activée via une commande SPI. CAN_transmit : programme basique de configuration du module FlexCAN en émission (CAN1). L émission sur le bus CAN est cadencée par le timer1. Le SBC est placé en mode Debug et l interface CAN est activée via une commande SPI. DSPI_command_send : envoi d une commande sur le bus SPI (DSPI1). EIRQ_light_LED : allumage des 4 indicateurs lumineux du starter kit TRK-MPC5604B lors d un appui sur l interrupteur SW1-3, connectée à une entrée EIRQ (external interrupt request). OPWM_ch22_ch23 : configuration de 2 sorties PWM (module emios). L horloge système est délivrée par la FM-PLL et sa fréquence est de 45 MHz. Les 2 canaux PWM commutent à 1 KHz avec un rapport cyclique de 50 et 25 % respectivement. switch_leds_1hz : clignotement toutes les secondes des 4 indicateurs lumineux du starter kit TRK-MPC5604B. L opération est synchronisée par le débordement du timer PIT1. L horloge système est délivrée par l oscillateur à quartz (fréquence bus = 8 MHz). switch_leds_1hz_pll : clignotement toutes les secondes des 4 indicateurs lumineux du starter kit TRK-MPC5604B. L opération est synchronisée par le débordement du timer PIT1. L horloge système est délivrée par la FM-PLL (fréquence bus = 45 MHz). 26
Le multiplexage. Sommaire
 Sommaire Table des matières 1- GENERALITES... 2 1-1 Introduction... 2 1-2 Multiplexage... 4 1-3 Transmission numérique... 5 2- LA NUMERATION HEXADECIMALE Base 16... 8 3- ARCHITECTURE ET PROTOCOLE DES RESEAUX...
Sommaire Table des matières 1- GENERALITES... 2 1-1 Introduction... 2 1-2 Multiplexage... 4 1-3 Transmission numérique... 5 2- LA NUMERATION HEXADECIMALE Base 16... 8 3- ARCHITECTURE ET PROTOCOLE DES RESEAUX...
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
13/11/2009 DUT-MUX-0185 /V2.0
 www.nsi.fr MUXy diag R Guide utilisateur 13/11/2009 DUT-MUX-0185 /V2.0 Auteur : Approbation : Bruno Cottarel C. Andagnotto Page laissée intentionnellement blanche I. Contenu I. CONTENU... 1 II. AVERTISSEMENTS...
www.nsi.fr MUXy diag R Guide utilisateur 13/11/2009 DUT-MUX-0185 /V2.0 Auteur : Approbation : Bruno Cottarel C. Andagnotto Page laissée intentionnellement blanche I. Contenu I. CONTENU... 1 II. AVERTISSEMENTS...
fullprotect inside EOLE SPEie RS E-SPEie 0.5-12-5V-0.6A-RS 1.0 revision Protection environnement Datasheet édition française
 Protection environnement Datasheet édition française 1.0 revision R-D-CO-D-27112011-1.0-C fullprotect inside SPEi Protection environnement interne SPEe Protection environnement externe SPEc Contrôle de
Protection environnement Datasheet édition française 1.0 revision R-D-CO-D-27112011-1.0-C fullprotect inside SPEi Protection environnement interne SPEe Protection environnement externe SPEc Contrôle de
Dossier technique. Présentation du bus DMX et Utilisation des options EL13 / EL14 ERM AUTOMATISMES INDUSTRIELS 1 LE PROTOCOLE DMX 2
 ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : [email protected] 1
ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : [email protected] 1
Présentation et installation PCE-LOG V4 1-5
 PCE-LOG V4 version borne externe type PC50 mesures U, I + 3 TS version coffret mural mesures U, U, I + 3TS PRESENTATION 1-5 1 Presentation PCE-LOG V4 est un datalogger pour la télésurveillance de la protection
PCE-LOG V4 version borne externe type PC50 mesures U, I + 3 TS version coffret mural mesures U, U, I + 3TS PRESENTATION 1-5 1 Presentation PCE-LOG V4 est un datalogger pour la télésurveillance de la protection
Enregistreur de Température pour PC DALLAS 1820
 Conrad sur INTERNET www.conrad.fr * Capteur à visser, M10, 5 m de câble DS 1820-HD-5M Capteur à visser, M10, longueur spéciale DS 1820-HD-SL Capteur à visser, G1/8, 2m de câble DS 1820-G18-2M Capteur à
Conrad sur INTERNET www.conrad.fr * Capteur à visser, M10, 5 m de câble DS 1820-HD-5M Capteur à visser, M10, longueur spéciale DS 1820-HD-SL Capteur à visser, G1/8, 2m de câble DS 1820-G18-2M Capteur à
Module Relais de temporisation DC 24 110 V, programmable
 Caractéristiques techniques indicatives sous réserve de modifications 815006.00 Identification Type ZR6-5006.00 Version du produit Version du fiche technique 00 Application/ Domaine d'utilisation/caractéristiques
Caractéristiques techniques indicatives sous réserve de modifications 815006.00 Identification Type ZR6-5006.00 Version du produit Version du fiche technique 00 Application/ Domaine d'utilisation/caractéristiques
LOGICIEL DC4D MONITOR
 THQtronic LOGICIEL DC4D MONITOR La communication entre PC et DC4D ne peut se faire qu à l aide du câble de liaison USB-TTL de FTDI référence TTL-232R-5V-AJ vendu en option. DC4D Monitor est la même application
THQtronic LOGICIEL DC4D MONITOR La communication entre PC et DC4D ne peut se faire qu à l aide du câble de liaison USB-TTL de FTDI référence TTL-232R-5V-AJ vendu en option. DC4D Monitor est la même application
ANALYSE TRAMEs LIAISON SERIE
 ANALYSE TRAMEs LIAISON SERIE 1 Objectifs de ce travail Nous allons étudier dynamiquement la liaison série en utilisant la simulation. La mise en œuvre des liaisons séries simulées et de TestCom est expliquée
ANALYSE TRAMEs LIAISON SERIE 1 Objectifs de ce travail Nous allons étudier dynamiquement la liaison série en utilisant la simulation. La mise en œuvre des liaisons séries simulées et de TestCom est expliquée
opti-vm Serveur Vocal et Standard Automatique Siemens HiPath 11xx et Hipath 12xx Installation et Guide Utilisateur Version 1.0
 opti-vm Serveur Vocal et Standard Automatique Siemens HiPath 11xx et Hipath 12xx Installation et Guide Utilisateur Version 1.0 SOMMAIRE SOMMAIRE 1- INTRODUCTION... 4 1.1 Standard Automatique...4 1.2 Messagerie
opti-vm Serveur Vocal et Standard Automatique Siemens HiPath 11xx et Hipath 12xx Installation et Guide Utilisateur Version 1.0 SOMMAIRE SOMMAIRE 1- INTRODUCTION... 4 1.1 Standard Automatique...4 1.2 Messagerie
PIC EVAL Dev Board PIC18F97J60
 PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
MANUEL D INSTRUCTION
 MANUEL D INSTRUCTION ---------- Régulateur de Charge Solaire pour deux batteries, Pour Caravanes, Camping-Cars & Bateaux Courant (12V or 12/24V automatique) NOTES: Utilisable seulement avec des panneaux
MANUEL D INSTRUCTION ---------- Régulateur de Charge Solaire pour deux batteries, Pour Caravanes, Camping-Cars & Bateaux Courant (12V or 12/24V automatique) NOTES: Utilisable seulement avec des panneaux
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
NUGELEC. NOTICE D'UTILISATION DU B.A.A.S. du type Ma - STI / MaME - STI. pages. 1 introduction 2. 2 encombrement 3 fixation
 NOTICE D'UTILISATION DU du type Ma - / MaME - pages 1 introduction 2 2 encombrement 3 fixation 3 installation 3 à 5 raccordement 4 fonctionnement 5 à 6 contrôle, essai 5 caractéristiques 7 techniques 6
NOTICE D'UTILISATION DU du type Ma - / MaME - pages 1 introduction 2 2 encombrement 3 fixation 3 installation 3 à 5 raccordement 4 fonctionnement 5 à 6 contrôle, essai 5 caractéristiques 7 techniques 6
Centrale d alarme DA996
 Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3 & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3. SIMULATION 7 " - 4.
 '*+ , ##) # -. /0 1 2 3. SIMULATION 7 - 4.") TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3! " #$ % & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3' & 3. SIMULATION 7 0 ( 0, - 0 - " - & 1 4. LA SOURIS 11 5. LES RACCOURCIS CLAVIER 11 STI Electronique
TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3! " #$ % & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3' & 3. SIMULATION 7 0 ( 0, - 0 - " - & 1 4. LA SOURIS 11 5. LES RACCOURCIS CLAVIER 11 STI Electronique
Modules d entrées/sorties pour FX série XM07 et XM14
 Fiche produit Modules XM07 et XM14 Date Juillet 2009 Modules d entrées/sorties pour FX série XM07 et XM14 Les modules XM07 et XM14 proposent des points d entrées et de sorties physiques supplémentaires
Fiche produit Modules XM07 et XM14 Date Juillet 2009 Modules d entrées/sorties pour FX série XM07 et XM14 Les modules XM07 et XM14 proposent des points d entrées et de sorties physiques supplémentaires
Conférence sur les microcontroleurs.
 Conférence sur les microcontroleurs. Le microcontrôleur Les besoins et le développement. Vers 1970, pour des calculs (calculatrice). Le premier est le 4004 de Intel, 90K. La technologie. Les 2 principales
Conférence sur les microcontroleurs. Le microcontrôleur Les besoins et le développement. Vers 1970, pour des calculs (calculatrice). Le premier est le 4004 de Intel, 90K. La technologie. Les 2 principales
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Catalogue Produits. 2011 v1
 Catalogue Produits 2011 v1 A propos d Actisense INTRODUCTION Interfaces et Sondes intelligentes Actisense. Depuis plusieurs années Actisense est synonyme d excellence dans le domaine des sondes intelligentes,
Catalogue Produits 2011 v1 A propos d Actisense INTRODUCTION Interfaces et Sondes intelligentes Actisense. Depuis plusieurs années Actisense est synonyme d excellence dans le domaine des sondes intelligentes,
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
UP 588/13 5WG1 588-2AB13
 Informations Technique Description du produit et de ses fonctionnalités Dans le menu «Réglage» vous avez le choix entre 4 styles d affichage. Les accessoires suivants sont nécessaires: è è è 5WG1 588 8AB14
Informations Technique Description du produit et de ses fonctionnalités Dans le menu «Réglage» vous avez le choix entre 4 styles d affichage. Les accessoires suivants sont nécessaires: è è è 5WG1 588 8AB14
Contrôleur de communications réseau. Guide de configuration rapide DN1657-0606
 K T - N C C Contrôleur de communications réseau Guide de configuration rapide DN1657-0606 Objectif de ce document Ce Guide de configuration rapide s adresse aux installateurs qui sont déjà familiers avec
K T - N C C Contrôleur de communications réseau Guide de configuration rapide DN1657-0606 Objectif de ce document Ce Guide de configuration rapide s adresse aux installateurs qui sont déjà familiers avec
Procédure appropriée pour éditer les diagrammes avec ECM Titanium
 Procédure appropriée pour éditer les diagrammes avec ECM Titanium Introduction: Dans ce document vous trouverez toutes les renseignements dont vous avez besoin pour éditer les diagrammes avec le logiciel
Procédure appropriée pour éditer les diagrammes avec ECM Titanium Introduction: Dans ce document vous trouverez toutes les renseignements dont vous avez besoin pour éditer les diagrammes avec le logiciel
ScoopFone. www.aeta-audio.com. Prise en main rapide
 ScoopFone www.aeta-audio.com Prise en main rapide Les spécifications peuvent changer sans préavis 55 000 081-F 2015 Face avant et contrôles 4 6 9 10 12 13 14 1 2 3 20 21 5 7 8 1. Niveau de contrôle: Ce
ScoopFone www.aeta-audio.com Prise en main rapide Les spécifications peuvent changer sans préavis 55 000 081-F 2015 Face avant et contrôles 4 6 9 10 12 13 14 1 2 3 20 21 5 7 8 1. Niveau de contrôle: Ce
SAGEM Wi-Fi 11g USB ADAPTER Guide de mise en route rapide pour Mac OS X
 SAGEM Wi-Fi 11g USB ADAPTER Guide de mise en route rapide pour Mac OS X But de ce guide Ce guide décrit la méthode d'installation et de configuration de votre SAGEM Wi-Fi 11g USB ADAPTER pour réseau sans
SAGEM Wi-Fi 11g USB ADAPTER Guide de mise en route rapide pour Mac OS X But de ce guide Ce guide décrit la méthode d'installation et de configuration de votre SAGEM Wi-Fi 11g USB ADAPTER pour réseau sans
MANUEL D INSTALLATION
 Data Processing Commission Fast Advanced Software for Table soccer - v 1.0 Logiciel de gestion de tournoi de football de table MANUEL D INSTALLATION INSTALLATION INFORMATIQUE DE LA TABLE DE MARQUE & CONFIGURATION
Data Processing Commission Fast Advanced Software for Table soccer - v 1.0 Logiciel de gestion de tournoi de football de table MANUEL D INSTALLATION INSTALLATION INFORMATIQUE DE LA TABLE DE MARQUE & CONFIGURATION
NOUVELLE série KTS pour un diagnostic confortable, rapide et fiable
 NOUVELLE série KTS pour un diagnostic confortable, rapide et fiable Confortable - Connexion Bluetooth USB spécifique Bosch Rapide - Du branchement aisé de l équipement de mesure jusqu à la détermination
NOUVELLE série KTS pour un diagnostic confortable, rapide et fiable Confortable - Connexion Bluetooth USB spécifique Bosch Rapide - Du branchement aisé de l équipement de mesure jusqu à la détermination
ENREGISTREUR DE TEMPERATURE
 ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
MT-703. Surveillance de niveau par sonde résistive TELEMETRIE PAR MODULE GSM CONFIGURATION ET UTILISATION
 TELEMETRIE PAR MODULE GSM CONFIGURATION ET UTILISATION Surveillance de niveau par sonde résistive MT-703 LOREME 12, rue des Potiers d'etain Actipole BORNY - B.P. 35014-57071 METZ CEDEX 3 Téléphone 03.87.76.32.51
TELEMETRIE PAR MODULE GSM CONFIGURATION ET UTILISATION Surveillance de niveau par sonde résistive MT-703 LOREME 12, rue des Potiers d'etain Actipole BORNY - B.P. 35014-57071 METZ CEDEX 3 Téléphone 03.87.76.32.51
MICROCONTROLEURS PIC PROGRAMMATION EN C. V. Chollet - cours-pic-13b - 09/12/2012 Page 1 sur 44
 MICROCONTROLEURS PIC PROGRAMMATION EN C V. Chollet - cours-pic-13b - 09/12/2012 Page 1 sur 44 Chapitre 1 GENERALITES 1 DEFINITION Un microcontrôleur est un microprocesseur RISC (Reduced Instruction Set
MICROCONTROLEURS PIC PROGRAMMATION EN C V. Chollet - cours-pic-13b - 09/12/2012 Page 1 sur 44 Chapitre 1 GENERALITES 1 DEFINITION Un microcontrôleur est un microprocesseur RISC (Reduced Instruction Set
Une liste des distributeurs Paxton se trouve sur le site Internet - http://paxton.info/508
 1/1/009 Ins-30108-F Kit d évaluation Net Paxton Pour une assistance technique, merci de contacter votre fournisseur Une liste des distributeurs Paxton se trouve sur le site Internet - http://paxton.info/508
1/1/009 Ins-30108-F Kit d évaluation Net Paxton Pour une assistance technique, merci de contacter votre fournisseur Une liste des distributeurs Paxton se trouve sur le site Internet - http://paxton.info/508
Document de formation pour une solution complète d automatisation Totally Integrated Automation (T I A) MODULE A5 Programmation de la CPU 314C-2DP
 MODULE A5 Programmation de la CPU 314C-2DP") Document de formation pour une solution complète d automatisation Totally Integrated Automation (T I A) MODULE A5 Document de formation T I A Page 1 sur 23 Module A5 Ce document a été édité par Siemens
Document de formation pour une solution complète d automatisation Totally Integrated Automation (T I A) MODULE A5 Document de formation T I A Page 1 sur 23 Module A5 Ce document a été édité par Siemens
Fiche technique CPU 314SC/DPM (314-6CG13)
") Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
Fiche technique CPU 314SC/DPM (3146CG13) Données techniques N de commande 3146CG13 Type CPU 314SC/DPM Information générale Note Caractéristiques SPEEDBus Technologie SPEED7 24 x DI, 16 x DO, 8 x DIO, 4
VMT Mod : Ventilation modulée pour le tertiaire
 Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Boîtier de contrôle et de commande avec EV 3/2 voies intégrée
 A B C Boîtier de contrôle et de commande avec EV 3/2 voies intégrée Conception Le boîtier de contrôle / commande type GEMÜ avec électrovanne pilote 3/2 voies intégrée pour les actionneurs pneumatiques
A B C Boîtier de contrôle et de commande avec EV 3/2 voies intégrée Conception Le boîtier de contrôle / commande type GEMÜ avec électrovanne pilote 3/2 voies intégrée pour les actionneurs pneumatiques
Réglage, paramétrage, contrôle, modification. Salle de conférence.
 Réglage, paramétrage, contrôle, modification. Salle de conférence. Session 2011 Enseignants : Laurent BOUSQUET Bernard TAULOU SYSTEME : Salle de conférence THEME D ETUDE : Automatisme du bâtiment CCF sous
Réglage, paramétrage, contrôle, modification. Salle de conférence. Session 2011 Enseignants : Laurent BOUSQUET Bernard TAULOU SYSTEME : Salle de conférence THEME D ETUDE : Automatisme du bâtiment CCF sous
COACH-II Manuel d utilisation
 COACH-II Manuel d utilisation MA-COACH-II_FR Page 1 on 25 Rev: 29/03/2011 1. INTRODUCTION...3 2. VUE GENERALE...4 3. DIMENSIONS MECANIQUES...5 4. CARACTERISTIQUES TECHNIQUES...6 4.1. Générales...6 4.1.1.
COACH-II Manuel d utilisation MA-COACH-II_FR Page 1 on 25 Rev: 29/03/2011 1. INTRODUCTION...3 2. VUE GENERALE...4 3. DIMENSIONS MECANIQUES...5 4. CARACTERISTIQUES TECHNIQUES...6 4.1. Générales...6 4.1.1.
FRANCAIS DGM1. Centrale Vigik 1 porte. N d homologation : - PS-200306-01 - MS-200306-02. Gamme: Vigik MANUEL D INSTALLATION.
 ANCAIS N d homologation : - PS-200306-01 - MS-200306-02 Gamme: Vigik MANUEL D INSTALLATION Group Products 1] PRESENTATION DU PRODUIT Conforme Mifare - ISO 14443A (système ouvert à toutes les marques de
ANCAIS N d homologation : - PS-200306-01 - MS-200306-02 Gamme: Vigik MANUEL D INSTALLATION Group Products 1] PRESENTATION DU PRODUIT Conforme Mifare - ISO 14443A (système ouvert à toutes les marques de
Transmissions série et parallèle
 1. Introduction : Un signal numérique transmet généralement plusieurs digits binaires. Exemple : 01000001 ( huit bits). Dans une transmission numérique on peut envisager deux modes : les envoyer tous en
1. Introduction : Un signal numérique transmet généralement plusieurs digits binaires. Exemple : 01000001 ( huit bits). Dans une transmission numérique on peut envisager deux modes : les envoyer tous en
Manuel d aide à la pose
 Manuel d aide à la pose Téléphones d Urgence de la série DICTIS MICOME Téléphones d urgence Téléalarmes Pont de Peille 06340 Drap France Tel : (33) 4 93 91 16 17 Fax : (33) 4 93 91 26 27 e-mail : [email protected]
Manuel d aide à la pose Téléphones d Urgence de la série DICTIS MICOME Téléphones d urgence Téléalarmes Pont de Peille 06340 Drap France Tel : (33) 4 93 91 16 17 Fax : (33) 4 93 91 26 27 e-mail : [email protected]
COMMUTEL PRO VM3 INTERFACE GSM VOIX POUR EMULATION DE LIGNE RTC ET TRANSMETTEUR DE SMS D ALERTES ET TECHNIQUES.
 COMMUTEL PRO VM3 INTERFACE GSM VOIX POUR EMULATION DE LIGNE RTC ET TRANSMETTEUR DE SMS D ALERTES ET TECHNIQUES. 1. DESCRIPTION DU PRODUIT COMMUTEL PRO VM3 est un Secours GSM Canal Voix et un transmetteur
COMMUTEL PRO VM3 INTERFACE GSM VOIX POUR EMULATION DE LIGNE RTC ET TRANSMETTEUR DE SMS D ALERTES ET TECHNIQUES. 1. DESCRIPTION DU PRODUIT COMMUTEL PRO VM3 est un Secours GSM Canal Voix et un transmetteur
Prise en main. Prise en main - 0
 Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
Prise en main 0404 Prise en main - 0 1- Introduction Creative Professional Merci d avoir choisi le Digital Audio System 0404 d E-MU. Nous avons conçu ce produit E-MU pour qu il soit logique, intuitif et
MODULES ÉLECTRIQUES. - systèmes électriques DC - onduleurs - convertisseurs - interrupteurs statiques. Notre alimentation Votre confiance
 MODULES ÉLECTRIQUES - systèmes électriques DC - onduleurs - convertisseurs - interrupteurs statiques Notre alimentation Votre confiance Système Power 1UDC+ Jusqu à 38 redresseurs et un contrôleur, 1266A
MODULES ÉLECTRIQUES - systèmes électriques DC - onduleurs - convertisseurs - interrupteurs statiques Notre alimentation Votre confiance Système Power 1UDC+ Jusqu à 38 redresseurs et un contrôleur, 1266A
Hubert & Bruno Lundi 12 octobre 2009 SAINT-QUENTIN (02)
") Hubert & Bruno Lundi 12 octobre 2009 SAINT-QUENTIN (02) Ne rien livrer au hasard, c est économiser du travail Pont Sainte Maxence(O C est quoi USB? Comment ça marche? Les standards? La technique en détail
Hubert & Bruno Lundi 12 octobre 2009 SAINT-QUENTIN (02) Ne rien livrer au hasard, c est économiser du travail Pont Sainte Maxence(O C est quoi USB? Comment ça marche? Les standards? La technique en détail
Boîtier disque dur SATA 3,5 pouces Fonction économie d énergie
 Boîtier disque dur SATA 3,5 pouces Fonction économie d énergie PX-1106 Chère cliente, Cher client, Nous vous remercions pour l achat de ce boîtier de disque dur. Faites de votre disque dur une mémoire
Boîtier disque dur SATA 3,5 pouces Fonction économie d énergie PX-1106 Chère cliente, Cher client, Nous vous remercions pour l achat de ce boîtier de disque dur. Faites de votre disque dur une mémoire
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
MACHINE A SOUDER MANUEL D UTILISATION
 MACHINE A SOUDER (Réf ME056) MANUEL D UTILISATION France DETECTION SERVICES ZA LA CIGALIERE 2 84250 LE THOR Tél. 04.90.33.75.14 Fax : 04.90.33.75.17 Contact: [email protected] Web site: fdspro.com 1 Affichage
MACHINE A SOUDER (Réf ME056) MANUEL D UTILISATION France DETECTION SERVICES ZA LA CIGALIERE 2 84250 LE THOR Tél. 04.90.33.75.14 Fax : 04.90.33.75.17 Contact: [email protected] Web site: fdspro.com 1 Affichage
Programmation d un contrôleur via une liaison téléphonique Note d application
 Programmation d un contrôleur via une liaison téléphonique, Français Version 1.0.0 24/12/02 ii General Copyright 2001 by WAGO Kontakttechnik GmbH Tous droits réservés. WAGO Kontakttechnik GmbH Hansastraße
Programmation d un contrôleur via une liaison téléphonique, Français Version 1.0.0 24/12/02 ii General Copyright 2001 by WAGO Kontakttechnik GmbH Tous droits réservés. WAGO Kontakttechnik GmbH Hansastraße
ACS-30-EU-PCM2-x-32A Régulation et surveillance du traçage électrique des bâtiments commerciaux et résidentiels pour divers domaines d application
 ACS-0-EU-PCM-x-A Régulation et surveillance du traçage électrique des bâtiments commerciaux et résidentiels pour divers domaines d application Module de régulation et de distribution de l alimentation
ACS-0-EU-PCM-x-A Régulation et surveillance du traçage électrique des bâtiments commerciaux et résidentiels pour divers domaines d application Module de régulation et de distribution de l alimentation
AP1.1 : Montages électroniques élémentaires. Électricité et électronique
 STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
COMMANDER la puissance par MODULATION COMMUNIQUER
 SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
Université de La Rochelle. Réseaux TD n 6
 Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Présentation Module logique Zelio Logic 0 Interface de communication
 c 1 2 3 4 5 6 7 8 9 1 + 0 # = Présentation Module logique Zelio Logic 0 Présentation L offre communication de la gamme Zelio Logic est principalement dédiée à la surveillance ou à la télécommande de machines
c 1 2 3 4 5 6 7 8 9 1 + 0 # = Présentation Module logique Zelio Logic 0 Présentation L offre communication de la gamme Zelio Logic est principalement dédiée à la surveillance ou à la télécommande de machines
Manipulations du laboratoire
 Manipulations du laboratoire 1 Matériel Les manipulations de ce laboratoire sont réalisées sur une carte électronique comprenant un compteur 4-bit asynchrone (74LS93) avec possibilité de déclenchement
Manipulations du laboratoire 1 Matériel Les manipulations de ce laboratoire sont réalisées sur une carte électronique comprenant un compteur 4-bit asynchrone (74LS93) avec possibilité de déclenchement
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
UGVL : HOMOLOGATION PS 200406-01. ZAC du bois Chaland 6 rue des Pyrénées LISES - 91056 EVRY Cedex FRANCE Tel. 01 69 11 46 00 Fax 01 69 11 46 10
 UGVL : HOMOLOGATION PS 200406-01 ZAC du bois Chaland 6 rue des Pyrénées LISES - 91056 EVRY Cedex FRANCE Tel. 01 69 11 46 00 Fax 01 69 11 46 10 www.aiphone.fr Crée-le : Mai 2005 Dernière modification le
UGVL : HOMOLOGATION PS 200406-01 ZAC du bois Chaland 6 rue des Pyrénées LISES - 91056 EVRY Cedex FRANCE Tel. 01 69 11 46 00 Fax 01 69 11 46 10 www.aiphone.fr Crée-le : Mai 2005 Dernière modification le
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
Modules d automatismes simples
 Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
PRESENTATION RESSOURCES. Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille
 PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
SOMe2100 MANUEL D UTILISATION. TRANSMETTEUR GSM/GPRS - M-Bus Master D INSTALLATION. Montage sur rail DIN. Notice simplifiée du module SOMe2100
 SOMe2100 TRANSMETTEUR GSM/GPRS - M-Bus Master MANUEL D UTILISATION ET D INSTALLATION Montage sur rail DIN com-xxx Edition du : 24/02/2014 SOMMAIRE I- GENERALITES 2 II- RACCORDEMENT ELECTRIQUE 3 III- PARAMETRAGE
SOMe2100 TRANSMETTEUR GSM/GPRS - M-Bus Master MANUEL D UTILISATION ET D INSTALLATION Montage sur rail DIN com-xxx Edition du : 24/02/2014 SOMMAIRE I- GENERALITES 2 II- RACCORDEMENT ELECTRIQUE 3 III- PARAMETRAGE
1 Introduction C+ + Algorithm e. languag. Algorigramm. machine binaire. 1-1 Chaîne de développement. Séance n 4
 1 Introduction 1-1 Chaîne de développement Algorithm e C+ + Algorigramm e languag e machine binaire Le programme est écrit à l aide de Multiprog sous forme d algorigramme puis introduit dans le microcontrôleur
1 Introduction 1-1 Chaîne de développement Algorithm e C+ + Algorigramm e languag e machine binaire Le programme est écrit à l aide de Multiprog sous forme d algorigramme puis introduit dans le microcontrôleur
Fiche technique variateur
 Fiche technique variateur Test et mise en service rapide des variateurs ATV600 avec le HMI intégré et WebServer Gamme : ATV600 Introduction Comment mettre en œuvre les variateurs Schneider pour des applications
Fiche technique variateur Test et mise en service rapide des variateurs ATV600 avec le HMI intégré et WebServer Gamme : ATV600 Introduction Comment mettre en œuvre les variateurs Schneider pour des applications
0 20mV; 0 40mV; 0 80mV; 0 160mV; 0 320mV; 0 640mV; 0 1,28V; 0 2,56V 0 5V; 0 10V
 ITM carte d entrèes analogues INTERFACES DE PROCES La carte ITM a 8 isolées entrées analogiques, chaque canal a un 16 bit A/N convertisseurs, avec une haute stabilité et une très haute rapport de réjection
ITM carte d entrèes analogues INTERFACES DE PROCES La carte ITM a 8 isolées entrées analogiques, chaque canal a un 16 bit A/N convertisseurs, avec une haute stabilité et une très haute rapport de réjection
PG208, Projet n 3 : Serveur HTTP évolué
 PG208, Projet n 3 : Serveur HTTP évolué Bertrand LE GAL, Serge BOUTER et Clément VUCHENER Filière électronique 2 eme année - Année universitaire 2011-2012 1 Introduction 1.1 Objectif du projet L objectif
PG208, Projet n 3 : Serveur HTTP évolué Bertrand LE GAL, Serge BOUTER et Clément VUCHENER Filière électronique 2 eme année - Année universitaire 2011-2012 1 Introduction 1.1 Objectif du projet L objectif
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
IV- Comment fonctionne un ordinateur?
 1 IV- Comment fonctionne un ordinateur? L ordinateur est une alliance du hardware (le matériel) et du software (les logiciels). Jusqu à présent, nous avons surtout vu l aspect «matériel», avec les interactions
1 IV- Comment fonctionne un ordinateur? L ordinateur est une alliance du hardware (le matériel) et du software (les logiciels). Jusqu à présent, nous avons surtout vu l aspect «matériel», avec les interactions
CLIP. (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant
 Appareil autonome affichant le numéro appelant") 1. Besoin CLIP (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant ETUDE FONCTIONNELLE De très nombreux abonnés du réseau téléphonique commuté ont exprimé le besoin
1. Besoin CLIP (Calling Line Identification Presentation) Appareil autonome affichant le numéro appelant ETUDE FONCTIONNELLE De très nombreux abonnés du réseau téléphonique commuté ont exprimé le besoin
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
SMS-COM LT RAILS DIN V 2. 2 0. Manuel d installation, de programmation et d utilisation.
 1. Description du produit: SMS-COM LT RAILS DIN V 2. 2 0 Manuel d installation, de programmation et d utilisation. Le SMS-COM LT RD est un transmetteur de SMS avec un GSM QUAD-Band 800/900/1800/1900 Mhz
1. Description du produit: SMS-COM LT RAILS DIN V 2. 2 0 Manuel d installation, de programmation et d utilisation. Le SMS-COM LT RD est un transmetteur de SMS avec un GSM QUAD-Band 800/900/1800/1900 Mhz
epowerswitch 8XM+ Fiche technique
 Fiche technique L est le successeur de l epowerswitch 8XM. Il peut piloter jusqu à 136 prises secteur et dispose de borniers à vis amovibles en face avant pour une connexion aisée et rapide de capteurs
Fiche technique L est le successeur de l epowerswitch 8XM. Il peut piloter jusqu à 136 prises secteur et dispose de borniers à vis amovibles en face avant pour une connexion aisée et rapide de capteurs
CIRCUIT DE CHARGE BOSCH
 LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
! analyse du fonctionnement
 Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
Coloreau chaude MT V P1 V MT! Le composant repéré TH1 sur le schéma structurel et une thermistance. Son rôle est de détecter une grandeur physique la température, et de la convertir en une grandeur électrique
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
COMMANDER A DISTANCE LE ROBOT-PONG ETUDE DE LA TELECOMMANDE (2 nde PARTIE)
") SIN STI2D - Système d'information et Numérique TD TP Cours Synthèse Devoir Evaluation Projet Document ressource COMMANDER A DISTANCE LE ROBOT-PONG ETUDE DE LA TELECOMMANDE (2 nde PARTIE) 1 GESTION DES
SIN STI2D - Système d'information et Numérique TD TP Cours Synthèse Devoir Evaluation Projet Document ressource COMMANDER A DISTANCE LE ROBOT-PONG ETUDE DE LA TELECOMMANDE (2 nde PARTIE) 1 GESTION DES
GUIDE DE L UTILISATEUR
 GUIDE DE L UTILISATEUR Version du 11.09.2002 Page 1 GUIDE DE L UTILISATEUR 1. Objet : Le présent guide utilisateur a pour but d aider le client dans l installation du Surfboard câble modem SB4100e ainsi
GUIDE DE L UTILISATEUR Version du 11.09.2002 Page 1 GUIDE DE L UTILISATEUR 1. Objet : Le présent guide utilisateur a pour but d aider le client dans l installation du Surfboard câble modem SB4100e ainsi
GPA770 Microélectronique appliquée Exercices série A
 GPA770 Microélectronique appliquée Exercices série A 1. Effectuez les calculs suivants sur des nombres binaires en complément à avec une représentation de 8 bits. Est-ce qu il y a débordement en complément
GPA770 Microélectronique appliquée Exercices série A 1. Effectuez les calculs suivants sur des nombres binaires en complément à avec une représentation de 8 bits. Est-ce qu il y a débordement en complément
EL70x1 en mode position. Mise en œuvre rapide. VERSION : Beta / DATE : 31 Juillet 2011
 - EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
- EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
Conception Electronique (CEL) Prof. Maurizio Tognolini
 Prof. Maurizio Tognolini") Conception Electronique (CEL) Prof. Maurizio Tognolini iai institut d Automatisation industrielle MTI/CEL 19/09/2010 v2.0 1 CEL semestre «automne» 2010-2011 Enseignement: cours et labo: (Chaque semaine)
Conception Electronique (CEL) Prof. Maurizio Tognolini iai institut d Automatisation industrielle MTI/CEL 19/09/2010 v2.0 1 CEL semestre «automne» 2010-2011 Enseignement: cours et labo: (Chaque semaine)
CONFIGURATION ET UTILISATION
 COMPARATEUR DE CODE GRAY POUR CODEURS A SORTIES PARALLELES CONFIGURATION ET UTILISATION CCN165 LOREME 12, rue des Potiers d'etain Actipole BORNY - B.P. 35014-57071 METZ CEDEX 3 Téléphone 03.87.76.32.51
COMPARATEUR DE CODE GRAY POUR CODEURS A SORTIES PARALLELES CONFIGURATION ET UTILISATION CCN165 LOREME 12, rue des Potiers d'etain Actipole BORNY - B.P. 35014-57071 METZ CEDEX 3 Téléphone 03.87.76.32.51
COMMUNICATION ENTRE DEUX ORDINATEURS PAR LASER MODULE EN CODE MORSE OU BINAIRE.
 COMMUNICATION ENTRE DEUX ORDINATEURS PAR LASER MODULE EN CODE MORSE OU BINAIRE. RESUME le fichier exécutable «morsebinaire_win_orphygts II_v2.exe», est un logiciel de démonstration permettant de faire
COMMUNICATION ENTRE DEUX ORDINATEURS PAR LASER MODULE EN CODE MORSE OU BINAIRE. RESUME le fichier exécutable «morsebinaire_win_orphygts II_v2.exe», est un logiciel de démonstration permettant de faire
Programme. 048884-EcranTactile-01 MANUEL DE MISE EN ŒUVRE
 Programme d application 048884-EcranTactile-01 MANUEL DE MISE EN ŒUVRE Sommaire 4 5 7 10 11 13 14 18 19 21 22 Description des fonctionnalités du produit Généralité concernant le fonctionnement Utilisation
Programme d application 048884-EcranTactile-01 MANUEL DE MISE EN ŒUVRE Sommaire 4 5 7 10 11 13 14 18 19 21 22 Description des fonctionnalités du produit Généralité concernant le fonctionnement Utilisation
SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION. Contenu du dossier :
 DOSSIER DE PRESENTATION. Contenu du dossier :") SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION Contenu du dossier : 1. PRESENTATION DU SYSTEME DE PALPAGE A TRANSMISSION RADIO....1 1.1. DESCRIPTION DU FABRICANT....1
SYSTEME DE PALPAGE A TRANSMISSION RADIO ETUDE DU RECEPTEUR (MI16) DOSSIER DE PRESENTATION Contenu du dossier : 1. PRESENTATION DU SYSTEME DE PALPAGE A TRANSMISSION RADIO....1 1.1. DESCRIPTION DU FABRICANT....1
MODULE DIN RELAIS TECHNICAL SPECIFICATIONS RM1-230. Basse tension : Voltage : Nominal 12 Vdc, Maximum 14 Vdc
 RM1 Notice Technique DESCRIPTION MODULE DIN RELAIS Le module RM1 de la famille DIN permet de contrôler des charges diverses en les plaçant sous/hors tension. Il peut être contrôlé localement par un interrupteur
RM1 Notice Technique DESCRIPTION MODULE DIN RELAIS Le module RM1 de la famille DIN permet de contrôler des charges diverses en les plaçant sous/hors tension. Il peut être contrôlé localement par un interrupteur
Oscilloscope actif de précision CONCEPT 4000M
 Oscilloscope actif de précision CONCEPT 4000M ZI Toul Europe, Secteur B 54200 TOUL Tél.: 03.83.43.85.75 Email : [email protected] www.deltest.com Introduction L oscilloscope actif de précision Concept
Oscilloscope actif de précision CONCEPT 4000M ZI Toul Europe, Secteur B 54200 TOUL Tél.: 03.83.43.85.75 Email : [email protected] www.deltest.com Introduction L oscilloscope actif de précision Concept
VIII- Circuits séquentiels. Mémoires
 1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
1 VIII- Circuits séquentiels. Mémoires Maintenant le temps va intervenir. Nous avions déjà indiqué que la traversée d une porte ne se faisait pas instantanément et qu il fallait en tenir compte, notamment
DimNet Gradateurs Numériques Evolués Compulite. CompuDim 2000
 DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
Débuter avec PsoC ou PsoC niveau 0
 Débuter avec PsoC ou PsoC niveau 0 Objectifs : se familiariser avec les circuits PsoC et leur environnement, prendre en main le logiciel et le kit d'évaluation, développer une application simple avec le
Débuter avec PsoC ou PsoC niveau 0 Objectifs : se familiariser avec les circuits PsoC et leur environnement, prendre en main le logiciel et le kit d'évaluation, développer une application simple avec le
Notice d installation de la Centrale VIGIK DGM1
 Notice d installation de la Centrale VIGIK DGM1 Version 3.5 NOTICE DE MONTAGE ET D UTILISATION N homologation : PS 200306-01 MS 200306-02 Informations préliminaires Présentation des possibilités de la
Notice d installation de la Centrale VIGIK DGM1 Version 3.5 NOTICE DE MONTAGE ET D UTILISATION N homologation : PS 200306-01 MS 200306-02 Informations préliminaires Présentation des possibilités de la
Hiérarchie matériel dans le monde informatique. Architecture d ordinateur : introduction. Hiérarchie matériel dans le monde informatique
 Architecture d ordinateur : introduction Dimitri Galayko Introduction à l informatique, cours 1 partie 2 Septembre 2014 Association d interrupteurs: fonctions arithmétiques élémentaires Elément «NON» Elément
Architecture d ordinateur : introduction Dimitri Galayko Introduction à l informatique, cours 1 partie 2 Septembre 2014 Association d interrupteurs: fonctions arithmétiques élémentaires Elément «NON» Elément
Data loggers SOFREL LT/LT-US Solutions réseaux d eaux usées
 Data loggers SOFREL LT/LT-US Solutions réseaux d eaux usées Les data loggers SOFREL LT et LT-US ont été conçus pour la surveillance des réseaux d eaux usées et pluviales (collecteurs, déversoirs d orage,
Data loggers SOFREL LT/LT-US Solutions réseaux d eaux usées Les data loggers SOFREL LT et LT-US ont été conçus pour la surveillance des réseaux d eaux usées et pluviales (collecteurs, déversoirs d orage,
Gamme. Manuel à l usage du personnel qualifié. Climatiseurs Bi, Tri et Quadri split
 Attention : le label Eurovent ne s applique qu aux modèles bi-split Dossier de maintenance Climatiseurs multi-split DC Inverter Dossier de maintenance Climatiseurs multi-split DC Inverter Dossier de maintenance
Attention : le label Eurovent ne s applique qu aux modèles bi-split Dossier de maintenance Climatiseurs multi-split DC Inverter Dossier de maintenance Climatiseurs multi-split DC Inverter Dossier de maintenance
Guide Rapide. pour Nikon 340.00 354.00 MHz, US FCC/IC 433.42 434.42 MHz, CE MAKE IT POSSIBLE
 MAKE IT POSSIBLE Guide Rapide pour Nikon 340.00 354.00 MHz, US FCC/IC 433.42 434.42 MHz, CE Votre nouveau PocketWizard fonctionne grâce à un logiciel très sophistiqué appelé ControlTL qui peut être configuré
MAKE IT POSSIBLE Guide Rapide pour Nikon 340.00 354.00 MHz, US FCC/IC 433.42 434.42 MHz, CE Votre nouveau PocketWizard fonctionne grâce à un logiciel très sophistiqué appelé ControlTL qui peut être configuré
Sélection du contrôleur
 Démo CoDeSys - 1 - 1. Configuration de l environnement de travail : Lancer le logiciel CoDeSys Fichier Nouveau Lors de la première utilisation, une boîte de dialogue apparaît permettant la sélection du
Démo CoDeSys - 1 - 1. Configuration de l environnement de travail : Lancer le logiciel CoDeSys Fichier Nouveau Lors de la première utilisation, une boîte de dialogue apparaît permettant la sélection du
AMICUS 18 (2ème partie) 4) Présentation du logiciel Amicus IDE
 4) Présentation du logiciel Amicus IDE") AMICUS 18 (2ème partie) Dans la première partie, nous avions présenté la platine Amicus 18 et nous avions réalisé quelques montages simples. Nous allons découvrir un peu mieux la programmation. Dans la
AMICUS 18 (2ème partie) Dans la première partie, nous avions présenté la platine Amicus 18 et nous avions réalisé quelques montages simples. Nous allons découvrir un peu mieux la programmation. Dans la
!" #$$%& Disque dur 2.5 pouces Firewire Apple MacOS FR V2.4 - Page 1/17
 !" #$$%& Disque dur 2.5 pouces Firewire Apple MacOS FR V2.4 - Page 1/17 &%%#' %#( ) I CONTENU DE L'EMBALLAGE...3 II INTRODUCTION...3 III CONFIGURATION REQUISE...3 IV INSTALLATION MATERIELLE - CONNEXIONS...3
!" #$$%& Disque dur 2.5 pouces Firewire Apple MacOS FR V2.4 - Page 1/17 &%%#' %#( ) I CONTENU DE L'EMBALLAGE...3 II INTRODUCTION...3 III CONFIGURATION REQUISE...3 IV INSTALLATION MATERIELLE - CONNEXIONS...3
Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03
 Appareil de contrôle de niveau NK312 24V Manuel d utilisation Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03 Seite 1 Manuel d utilisation
Appareil de contrôle de niveau NK312 24V Manuel d utilisation Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03 Seite 1 Manuel d utilisation