L'USB en bref Donner un sens au standard USB
|
|
|
- Jean-Marie Gravel
- il y a 10 ans
- Total affichages :
Transcription
1 Document traduit du site Beyond Logic Chapitre 7 L'Enumération L'USB en bref Donner un sens au standard USB L'énumération est la manière de déterminer l'appareil qui vient juste d'être branché au bus et les paramètres dont il a besoin, comme la consommation électrique, le nombre et le type de terminaison, la classe du produit, etc. L'hôte attribuera donc à l'appareil une adresse et validera une configuration lui permettant de transférer des données sur le bus. Un assez bon processus d'énumération générique est détaillé en section de la spécification USB. Toutefois lorsque l'on écrit un microprogramme USB pour la première fois, il est plus pratique de connaître la manière dont l'hôte répond pendant l'énumération, plutôt que le processus d'énumération général détaillé dans la spécification. Une énumération sous Windows ordinaire implique les étapes suivantes : L'hôte ou Hub détecte la connexion d'un nouvel appareil via les résistances de rappel de l'appareil reliées sur les 2 fils de données. L'hôte attend au moins 100ms, le temps que la prise soit insérée complètement et que l'alimentation de l'appareil soit stabilisée. L'hôte émet un " reset " mettant l'appareil dans l'état par défaut. L'appareil peut maintenant répondre à l'adresse zéro par défaut. L'hôte (sous MS Windows) demande les 64 premiers octets du descripteur d'appareil. Après avoir reçu les 8 premiers octets du descripteur d'appareil, l'hôte émet immédiatement un autre reset sur le bus. L'hôte émet maintenant une commande SetAdress, mettant l'appareil dans l'état adressable. L'hôte demande la totalité des 18 octets du descripteur d'appareil. Puis il demande les 9 octets du descripteur de configuration pour déterminer la taille totale. L'hôte demande les 255 octets du descripteur de configuration. L'hôte demande l'un des descripteurs de chaînes s'ils étaient indiqués. A la fin de l 'étape 9, " Windows " demandera un driver (pilote logiciel) pour votre appareil. Il est alors courant de le voir redemander tous les descripteurs avant d'émettre une requête SetConfiguration. Le processus d'énumération ci-dessus est courant dans Windows 2000, Windows XP et Windows 98 SE. L'étape 4 embarrasse souvent les gens qui écrivent des microprogrammes pour la première fois. L'hôte demande les 64 premiers octets du descripteur d'appareil, aussi lorsque l'hôte met à zéro votre appareil après avoir reçu les 8 premiers octets, il est tout à fait naturel de penser qu'il y a un problème soit au niveau du descripteur d'appareil soit dans la façon dont votre microprogramme manipule la requête. Cependant, comme vous le diront beaucoup de gens, si vous insistez sur la mise en œuvre de la commande SetAdress, elle sera récompensée par la demande suivante de 18 octets pleins du descripteur d'appareil. Généralement quand il y a un problème avec le descripteur ou sur la façon dont il est envoyé, l'hôte tentera de le lire 3 fois avec de longues pauses entre les requêtes. Après la troisième tentative, l'hôte abandonne signalant une erreur au niveau de l'appareil. ACQUIER Bernard CHAP 7 Page 1/19 09/07/02

2
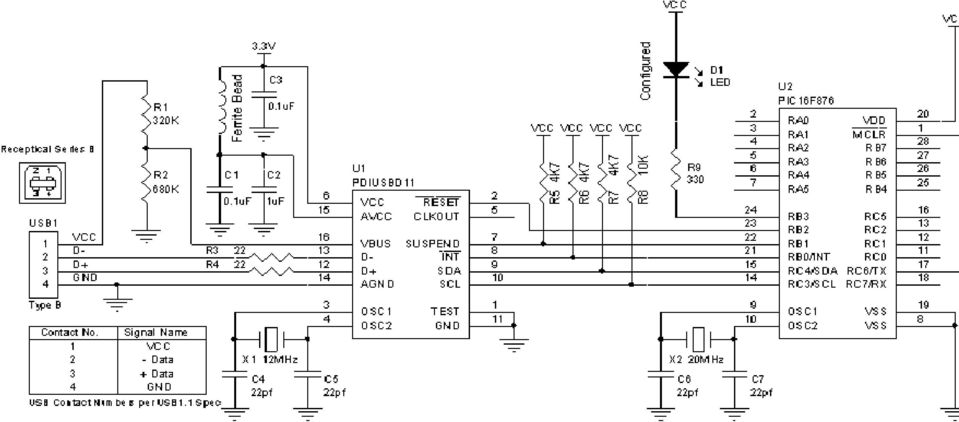
3 Microprogramme. Le PIC 16F876 pilotant le PDIUSBD11 Microprogramme. Le PIC 16F876 pilotant le PDIUSBD11 Nous commençons nos exemples avec le circuit USB PDIUSBD11 à liaison série I2C de Philips relié au microcontrôleur de Microchip, le PIC 16F876 représenté ici ou bien le PIC 16F877 (circuit à 40 broches). Tandis que Microchip a 2 circuits USB basse vitesse sur le marché actuellement, le PIC 16C745 et le PIC 16C765, ils sont seulement OTP (One Time Programmable= programmable une seule fois) sans le soutien du circuit interne de débogage (ICD) qui n'apporte pas vraiment d'aide au débit de la réalisation. Ils possèdent 4 nouveaux circuits " Flash " pleine vitesse avec le support de l'icd qui devraient sortir. En attendant, on trouve le PDIUSBD11 de Philips relié au PIC 16F876 qui a l'avantage d'être Flash et d'avoir l'icd. Un schéma électronique de base est représenté ci-dessus. L'exemple énumère et permet à des tensions analogiques d'être mesurées à partir des 5 entrées ADC multiplexées du microcontrôleur (MCU) PIC 16F876. Le code est compatible avec le PIC 16F877 permettant un maximum de 8 voies analogiques. Une LED reliée à la broche RB3 s'allume quand le circuit est configuré. Un régulateur de 3,3V n'est pas dessiné, mais il est nécessaire au PDIUSBD11. Si vous alimentez le circuit exemple d'une alimentation externe, alors vous pouvez utiliser un vulgaire régulateur de tension 78L033 de 3,3V, cependant si vous voulez faire fonctionner le circuit en tant qu'appareil alimenté par le bus, un régulateur à faible chute de tension se révèlera obligatoire. Le débogage peut être fait en connectant TXD (broche 17) à un câble RS232 et branché à un PC configuré à bauds. Des formulations "printf" ont été incorporées permettant l'affichage de la progression de l'énumération. Le code a été écrit en C et compilé avec le compilateur Hi-Tech PICC. Ils ont une version de démonstration (7.86 PL4) de PICC à télécharger utilisable pendant 30 jours. Un fichier Hex pré compilé inclus en archive a été compilé pour être utilisé avec (ou sans) l'icd. #include <pic.h> #include <stdio.h> #include <string.h> #include "usbfull.h" const USB_DEVICE_DESCRIPTOR DeviceDescriptor = sizeof(usb_device_descriptor), /* blength */ TYPE_DEVICE_DESCRIPTOR, /* bdescriptortype */ 0x0110, /* bcdusb USB Version 1.1 */ 0, /* bdeviceclass */ 0, /* bdevicesubclass */ 0, /* bdeviceprotocol */ 8, /* bmaxpacketsize 8 Bytes */ 0x04B4, /* idvendor (Cypress Semi) */ 0x0002, /* idproduct (USB Thermometer Example) */ 0x0000, /* bcddevice */ 1, /* imanufacturer String Index */ 0, /* iproduct String Index */ 0, /* iserialnumber String Index */ 1 /* bnumberconfigurations */ ; ACQUIER Bernard CHAP 7 Page 2/19 09/07/02
 sans le")
4 Les " structures " sont toutes définies dans les fichiers d'en tête. Nous avons basé cet exemple sur l'exemple du thermomètre USB de Cypress pour que vous puissiez utiliser le driver USB du kit de démarrage de Cypress. Un nouveau driver générique qui prendrait ceci en charge est en phase d'écriture et d'autres exemples seront bientôt disponibles. Une seule chaîne de caractère est fournie pour afficher le nom du fabricant. Cela donne suffisamment d'informations sur la façon de mettre en œuvre des descripteurs de chaînes sans remplir le composant dans sa totalité avec du code. On peut trouver ici une description de descripteur d'appareil et de ses champs. const USB_CONFIG_DATA ConfigurationDescriptor = /* configuration descriptor */ sizeof(usb_configuration_descriptor), /* blength */ TYPE_CONFIGURATION_DESCRIPTOR, /* bdescriptortype */ sizeof(usb_config_data), /* wtotallength */ 1, /* bnuminterfaces */ 1, /* bconfigurationvalue */ 0, /* iconfiguration String Index */ 0x80, /* bmattributes Bus Powered, No Remote Wakeup */ 0x32 /* bmaxpower, 100mA */, /* interface descriptor */ sizeof(usb_interface_descriptor), /* blength */ TYPE_INTERFACE_DESCRIPTOR, /* bdescriptortype */ 0, /* binterface Number */ 0, /* balternatesetting */ 2, /* bnumendpoints */ 0xFF, /* binterfaceclass (Vendor specific) */ 0xFF, /* binterfacesubclass */ 0xFF, /* binterfaceprotocol */ 0 /* iinterface String Index */, /* endpoint descriptor */ sizeof(usb_endpoint_descriptor), /* blength */ TYPE_ENDPOINT_DESCRIPTOR, /* bdescriptortype */ 0x01, /* bendpoint Address EP1 OUT */ 0x02, /* bmattributes - Interrupt */ 0x0008, /* wmaxpacketsize */ 0x00 /* binterval */, /* endpoint descriptor */ sizeof(usb_endpoint_descriptor), /* blength */ TYPE_ENDPOINT_DESCRIPTOR, /* bdescriptortype */ 0x81, /* bendpoint Address EP1 IN */ 0x02, /* bmattributes - Interrupt */ 0x0008, /* wmaxpacketsize */ 0x00 /* binterval */ ; Une description du descripteur de configuration et de ses champs figure ici. Nous fournissons 2 descripteurs de terminaison en plus du canal de communication par défaut. EP1 OUT est une terminaison OUT de Bloc de 8 octets maximum et EP1 IN OUT est une terminaison IN de Bloc de 8 octets maximum. Notre exemple lit les données de la terminaison OUT de Bloc et les met dans un tampon mémoire circulaire de 80 octets. L'envoi d'un paquet IN à EP1 permettra de lire un morceau de 8 octets du tampon mémoire circulaire. ACQUIER Bernard CHAP 7 Page 3/19 09/07/02

5 LANGID_DESCRIPTOR LANGID_Descriptor = /* LANGID String Descriptor Zero */ sizeof(langid_descriptor), /* blenght */ TYPE_STRING_DESCRIPTOR, /* bdescriptortype */ 0x0409 /* LANGID US English */ ; const MANUFACTURER_DESCRIPTOR Manufacturer_Descriptor = /* ManufacturerString 1 */ sizeof(manufacturer_descriptor), /* blenght */ TYPE_STRING_DESCRIPTOR, /* bdescriptortype */ "B\0e\0y\0o\0n\0d\0 \0L\0o\0g\0i\0c\0" UNICODE */ ; /* ManufacturerString in Un descripteur de chaîne d'index zéro est formé pour supporter les besoins de LANGID des descripteurs de chaînes USB. Celui-ci indique que tous les descripteurs sont en anglais US. Le descripteur de constructeur peut être un peu décevant parce que la taille du tableau de caractères est fixée dans l'en tête et n'est pas dynamique. #define MAX_BUFFER_SIZE 80 bank1 unsigned char circularbuffer[max_buffer_size]; unsigned char inpointer; unsigned char outpointer; unsigned char *psendbuffer; unsigned char BytesToSend; unsigned char CtlTransferInProgress; unsigned char DeviceAddress; unsigned char DeviceConfigured; #define PROGRESS_IDLE 0 #define PROGRESS_ADDRESS 3 void main (void) TRISB = 0x03; /* Int & Suspend Inputs */ RB3 = 1; /* Device Not Configured (LED) */ RB2 = 0; /* Reset PDIUSBD11 */ InitUART(); printf("initialising\n\r"); I2C_Init(); RB2 = 1; /* Bring PDIUSBD11 out of reset */ ADCON1 = 0x80; /* ADC Control - All 8 Channels Enabled, */ /* supporting upgrade to 16F877 */ USB_Init(); printf("pdiusbd11 Ready for connection\n\r"); while(1) D11GetIRQ(); La fonction principale dépend de l'exemple. Elle est responsable de l'initialisation de la direction des E/S des Ports, de l'initialisation de l'interface I2C, des Convertisseurs Analogiques Digitaux et du PDIUSBD11. Une fois que tout ceci est configuré, elle continue d'interroger D11GetIRQ qui traite les requêtes d'interruption du PDIUSBD11. ACQUIER Bernard CHAP 7 Page 4/19 09/07/02

6 void USB_Init(void) unsigned char Buffer[2]; /* Disable Hub Function in PDIUSBD11 */ Buffer[0] = 0x00; D11CmdDataWrite(D11_SET_HUB_ADDRESS, Buffer, 1); /* Set Address to zero (default) and enable function */ Buffer[0] = 0x80; D11CmdDataWrite(D11_SET_ADDRESS_ENABLE, Buffer, 1); /* Enable function generic endpoints */ Buffer[0] = 0x02; D11CmdDataWrite(D11_SET_ENDPOINT_ENABLE, Buffer, 1); /* Set Mode - Enable SoftConnect */ Buffer[0] = 0x97; /* Embedded Function, SoftConnect, Clk Run, No LazyClk, Remote Wakeup */ Buffer[1] = 0x0B; /* CLKOut = 4MHz */ D11CmdDataWrite(D11_SET_MODE, Buffer, 2); La fonction USB " init " initialise le PDIUSBD11. Cette procédure d'initialisation a été omise de la documentation technique du PDIUSBD11 de Philips mais elle est disponible de leur FAQ (Foire Aux Questions). La dernière commande valide la connexion logicielle de la résistance de rappel sur D+ signalant que c'est un appareil pleine vitesse mais aussi prévient de sa présence sur le Bus Série Universel. void D11GetIRQ(void) unsigned short Irq; unsigned char Buffer[1]; do /* Read Interrupt Register to determine source of interrupt */ D11CmdDataRead(D11_READ_INTERRUPT_REGISTER, (unsigned char *)&Irq, 2); if (Irq) printf("irq = 0x%X: ",Irq); La fonction main() continue d'appeler D11GetIRQ en boucle. Cette fonction lit les registres d'interruption du PDIUSBD11 pour établir si des interruptions sont en suspens. Si c'est le cas, elle les traitera, sinon elle continuera sa boucle. D'autres appareils peuvent avoir plusieurs vecteurs d'interruptions relatif à chaque terminaison. Dans ce cas, chaque ISR (Interrupt Service Routine je pense!) traitera l'interruption appropriée enlevant les formulations "if". if (Irq & D11_INT_BUS_RESET) printf("bus Reset\n\r"); USB_Init(); if (Irq & D11_INT_EP0_OUT) printf("ep0_out: "); Process_EP0_OUT_Interrupt(); ACQUIER Bernard CHAP 7 Page 5/19 09/07/02
![Mode - Enable SoftConnect */ Buffer[0] = 0x97; /* Embedded Function, SoftConnect, Clk Run, No LazyClk, Remote Wakeup */ Buffer[1] = 0x0B; /* CLKOut = 4MHz */ D11CmdDataWrite(D11_SET_MODE, Buffer, 2);](/docs-images/47/13534550/images/page_6.jpg "La fonction USB \" init \" initialise le PDIUSBD11.")
7 1); 1); if (Irq & D11_INT_EP0_IN) printf("ep0_in: \n\r"); if (CtlTransferInProgress == PROGRESS_ADDRESS) D11CmdDataWrite(D11_SET_ADDRESS_ENABLE,&DeviceAddress,1); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP0_IN, Buffer, else CtlTransferInProgress = PROGRESS_IDLE; D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP0_IN, Buffer, WriteBufferToEndPoint(); Les formulations "if" apparaissent par ordre de priorité. L'interruption prioritaire la plus haute est le reset du bus. Elle appelle simplement USB_Init qui réinitialise la fonction USB. La priorité suivante est le canal de communication par défaut constitué de EP0 OUT et de EP1 IN. C'est ici que sont envoyées l'énumération et toutes les requêtes de commandes. Nous bifurquons sur une autre fonction pour manipuler les requêtes de EP0 OUT. Quand une requête est faîtes par l'hôte et qu'il veut recevoir des données, le PIC 16F876 enverra au PDIUSBD11 un paquet de 8 octets. Comme le bus USB est contrôlé par l'hôte, le PDIUSBD11 ne peut écrire les données quand il le désire, aussi il les stocke et attend un jeton IN provenant de l'hôte. Quand le PDIUSBD11 reçoit le jeton IN, il provoque une interruption. Cela laisse un temps suffisant pour recharger le prochain paquet de données à envoyer. Ceci est réalisé par une fonction supplémentaire : WriteBufferToEndpoint(). La section incluse dans CtlTransferInProgress == PROGRESS_ADDRESS maintient le positionnement de l'adresse de l'appareil. Nous détaillerons ceci plus tard. if (Irq & D11_INT_EP1_OUT) printf("ep1_out\n\r"); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP1_OUT, Buffer, 1); bytes = D11ReadEndpoint(D11_ENDPOINT_EP1_OUT, Buffer); for (count = 0; count < bytes; count++) circularbuffer[inpointer++] = Buffer[count]; if (inpointer >= MAX_BUFFER_SIZE) inpointer = 0; loadfromcircularbuffer(); //Kick Start if (Irq & D11_INT_EP1_IN) printf("ep1_in\n\r"); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP1_IN, Buffer, 1); loadfromcircularbuffer(); EP1 OUT et EP1 In sont mis en place pour lire et écrire des données par Blocs à destination et en provenance d'un tampon mémoire circulaire. Cette configuration permet au code d'être utilisé en adéquation avec l'exemple BulkUSB provenant du DDK de Windows. Le tampon mémoire circulaire a été défini plus haut dans le code comme comportant 80 octets de long et prenant toute la banque1 de la RAM du 16F876. ACQUIER Bernard CHAP 7 Page 6/19 09/07/02

8 if (Irq & D11_INT_EP2_OUT) printf("ep2_out\n\r"); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP2_OUT, Buffer, 1); Buffer[0] = 0x01; /* Stall Endpoint */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP2_OUT, Buffer, 1); if (Irq & D11_INT_EP2_IN) printf("ep2_in\n\r"); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP2_IN, Buffer, 1); Buffer[0] = 0x01; /* Stall Endpoint */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP2_IN, Buffer, 1); if (Irq & D11_INT_EP3_OUT) printf("ep3_out\n\r"); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP3_OUT, Buffer, 1); Buffer[0] = 0x01; /* Stall Endpoint */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP3_OUT, Buffer, 1); if (Irq & D11_INT_EP3_IN) printf("ep3_in\n\r"); D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP3_IN, Buffer, 1); Buffer[0] = 0x01; /* Stall Endpoint */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP3_IN, Buffer, 1); while (Irq); Les terminaisons 2 et 3 ne sont pas utilisés pour l'instant, aussi nous les bloquons si elles reçoivent une donnée quelconque. Le PDIUSBD11 a une commande SetEndpointEnable qui peut être utilisée pour valider ou dé valider la fonction de terminaison générique (n'importe qu'elle terminaison autre que le canal de communication par défaut). Nous pourrions utiliser cette commande pour dé valider les terminaisons de base, si nous envisageons de ne pas nous en servir plus tard. Toutefois pour l'instant, ce code fournit une base de travail. void Process_EP0_OUT_Interrupt(void) unsigned long a; unsigned char Buffer[2]; USB_SETUP_REQUEST SetupPacket; /* Check if packet received is Setup or Data - Also clears IRQ */ D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP0_OUT, &SetupPacket, 1); if (SetupPacket.bmRequestType & D11_LAST_TRAN_SETUP) La première chose à faire est de déterminer si le paquet reçu sur EP0 est un paquet de données ou un paquet d'installation. Un paquet d'installation contient une requête telle que GetDescriptor, tandis qu'un paquet de données contient des données d'une requête précédente. Nous avons de la chance que la plupart des requêtes n'envoient pas des paquets de données provenant de l'hôte vers l'appareil. La seule requête qui le réalise est SET_DESCRIPTOR mais elle est rarement mise en œuvre. ACQUIER Bernard CHAP 7 Page 7/19 09/07/02
![Buffer[0] = 0x01; /* Stall Endpoint */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP2_IN, Buffer, 1); if (Irq & D11_INT_EP3_OUT) printf("ep3_out\n\r");](/docs-images/47/13534550/images/page_8.jpg "D11CmdDataRead(D11_READ_LAST_TRANSACTION + D11_ENDPOINT_EP3_OUT, Buffer, 1); Buffer[0] = 0x01; /* Stall Endpoint */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP3_OUT, Buffer, 1); if (Irq")
9 /* This is a setup Packet - Read Packet */ D11ReadEndpoint(D11_ENDPOINT_EP0_OUT, &SetupPacket); /* Acknowlegde Setup Packet to EP0_OUT & Clear Buffer*/ D11CmdDataWrite(D11_ACK_SETUP, NULL, 0); D11CmdDataWrite(D11_CLEAR_BUFFER, NULL, 0); /* Acknowlegde Setup Packet to EP0_IN */ D11CmdDataWrite(D11_ENDPOINT_EP0_IN, NULL, 0); D11CmdDataWrite(D11_ACK_SETUP, NULL, 0); /* Parse bmrequesttype */ switch (SetupPacket.bmRequestType & 0x7F) Comme nous l'avons vu dans notre description de transferts de commande, un paquet d'installation ne peut pas être Non ACQuité(NAKed) ou Bloqué (STALLed). Quand le PDIUSBD11 reçoit un paquet d'installation, il vide le tampon EP0 IN et dé valide les commandes du tampon mémoire de validation et celles du tampon mémoire d'effacement. Cela garantit que le paquet d'installation est acquitté par le microcontrôleur en envoyant un acquittement de commande d'installation à EP0 IN et EP0 OUT avant qu'une commande de validation ou d 'effacement de tampon mémoire ne soit effective. La réception d'un paquet d'installation débloquera aussi une terminaison de commande bloquée (STALLed). Une fois le paquet installé dans la mémoire et le paquet d'installation validé, nous allons analyser la requête en commençant par son type. A ce moment nous ne nous intéressons pas à la direction, aussi nous masquons ce bit. Les 3 requêtes que tout appareil doit traiter sont la requête standard d'appareil, la requête standard d'interface et les requêtes standard de terminaisons. Nous fournissons notre fonctionnalité (lecture des entrées analogiques) par la requête constructeur, aussi nous ajoutons un type d'instruction pour les requêtes standard de constructeur. Si votre appareil supporte une spécification de classe USB, alors vous pouvez aussi avoir besoin d'ajouter des cas pour la requête de classe d'appareil, la requête de classe d'interface et/ou de la requête de classe de terminaison. case STANDARD_DEVICE_REQUEST: printf("standard Device Request "); switch (SetupPacket.bRequest) case GET_STATUS: /* Get Status Request to Device should return */ /* Remote Wakeup and Self Powered Status */ Buffer[0] = 0x01; Buffer[1] = 0x00; D11WriteEndpoint(D11_ENDPOINT_EP0_IN, Buffer, 2); case CLEAR_FEATURE: case SET_FEATURE: /* We don't support DEVICE_REMOTE_WAKEUP or TEST_MODE */ La requête GetStatus est utilisée pour rapporter l'état de l'appareil et dire par exemple si l'appareil est alimenté par le bus ou auto alimenté et s'il supporte le réveil à distance. Dans notre appareil, nous rapportons qu'il est auto alimenté et qu'il ne prend pas en charge le réveil à distance. ACQUIER Bernard CHAP 7 Page 8/19 09/07/02

10 D'après la requête caractéristique d'appareil, l'appareil ne supporte ni DEVICE_REMOTE_WAKEUP ni TEST_MODE et retourne comme résultat une erreur de requête USB. case SET_ADDRESS: printf("set Address\n\r"); DeviceAddress = SetupPacket.wValue 0x80; D11WriteEndpoint(D11_ENDPOINT_EP0_IN, NULL, 0); CtlTransferInProgress = PROGRESS_ADDRESS; La commande SetAddress est la seule commande qui continue d'être traitée après l'étape d'état. Toutes les autres commandes doivent finir le traitement avant l'étape d'état. L'adresse de l'appareil est lue puis combinée par un OU logique avec 0x80 et ensuite stockée dans une variable DeviceAddress. La combinaison par un OU logique avec 0x80 avec le bit le plus significatif indiquant si l'appareil est validé ou non est spécifique au PDIUSBD11. Un paquet de longueur nul est renvoyé comme état à l'hôte, indiquant que la commande est achevée. Toutefois l'hôte doit envoyer un jeton IN, récupérer le paquet de longueur nul et délivrer un ACK avant que l'on puisse changer d'adresse. Autrement l'appareil ne constatera peut être jamais que le jeton IN a été envoyé à l'adresse par défaut. L'achèvement de l'étape d'état est signalé par une interruption sur EP0 IN. Afin de différentier une réponse à SetAddress et une interruption normale EP0_IN, nous positionnons une variable, CtlTransferInProgress à PROGRESS_ADDRESS. Le programme de traitement de EP0 IN prévoit une vérification de CtlTransfertInProgress. Si elle équivaut à PROGRESS_ADDRESS la commande Set Address Enable est alors délivrée au PDIUSBD11 et CtlTransferInProgress est positionné à PROGRESS_IDLE. L'hôte donne 2ms à l'appareil pour changer d'adresse avant que la prochaine commande ne soit envoyée. case GET_DESCRIPTOR: GetDescriptor(&SetupPacket); case GET_CONFIGURATION: D11WriteEndpoint(D11_ENDPOINT_EP0_IN, &DeviceConfigured, 1); case SET_CONFIGURATION: printf("set Configuration\n\r"); DeviceConfigured = SetupPacket.wValue & 0xFF; D11WriteEndpoint(D11_ENDPOINT_EP0_IN, NULL, 0); if (DeviceConfigured) RB3 = 0; printf("\n\r *** Device Configured *** \n\r"); else RB3 = 1; /* Device Not Configured */ printf("\n\r ** Device Not Configured *** \n\r"); //case SET_DESCRIPTOR: default: /* Unsupported - Request Error - Stall */ ACQUIER Bernard CHAP 7 Page 9/19 09/07/02

11 GetConfiguration et SetConfiguration sont utilisés pour " valider " l'appareil USB permettant aux données d'être transférées sur les terminaisons autres que la terminaison zéro. SetConfiguration devrait être délivré avec wvalue égal à bconfigurationvalue de la configuration que vous voulez valider. Dans notre cas, nous n'avons qu'une configuration, la configuration 1. Une configuration de valeur zéro signifie que l'appareil n'est pas configuré tandis qu'une configuration de valeur différente de zéro indique que l'appareil est configuré. Le code ne recopie pas complètement la valeur de configuration, il la recopie seulement dans une variable locale (de stockage) appelée DeviceConfigured. Si la valeur dans wvalue ne correspond pas à bconfigurationvalue d'une configuration, elle devrait renvoyer le message : Erreur de Requête USB. case STANDARD_INTERFACE_REQUEST: printf("standard Interface Request\n\r"); switch (SetupPacket.bRequest) case GET_STATUS: /* Get Status Request to Interface should return */ /* Zero, Zero (Reserved for future use) */ Buffer[0] = 0x00; Buffer[1] = 0x00; D11WriteEndpoint(D11_ENDPOINT_EP0_IN, Buffer, 2); case SET_INTERFACE: /* Device Only supports default setting, Stall may be */ /* returned in the status stage of the request */ if (SetupPacket.wIndex == 0 && SetupPacket.wValue == 0) /* Interface Zero, Alternative Setting = 0 */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, NULL, 0); else case GET_INTERFACE: if (SetupPacket.wIndex == 0) /* Interface Zero */ Buffer[0] = 0; /* Alternative Setting */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, Buffer, 1); /* else fall through as RequestError */ //case CLEAR_FEATURE: //case SET_FEATURE: /* Interface has no defined features. Return RequestError */ default: Parmi les requêtes standard d'interface, aucune n'exécute vraiment de fonction. La requête GetStatus doit retourner un message composé de zéros et est réservée pour un usage ultérieur. Les requêtes SetInterface et GetInterface sont utilisées avec les descripteurs alternatifs d'interfaces. Jusqu'ici nous n'avons défini aucun descripteur alternatif d'interface, donc GetInterface renvoie un zéro et toutes les requêtes pour mettre à 1 une interface autre que l'interface zéro avec un positionnement alternatif de zéro se traduiront par une Erreur de Requête. ACQUIER Bernard CHAP 7 Page 10/19 09/07/02
 appelée DeviceConfigured.")
12 case STANDARD_ENDPOINT_REQUEST: printf("standard Endpoint Request\n\r"); switch (SetupPacket.bRequest) Interrupt and */ Default Pipe */ case CLEAR_FEATURE: case SET_FEATURE: /* Halt(Stall) feature required to be implemented on all /* Bulk Endpoints. It is not required nor recommended on the if (SetupPacket.wValue == ENDPOINT_HALT) if (SetupPacket.bRequest == CLEAR_FEATURE) Buffer[0] = 0x00; else Buffer[0] = 0x01; switch (SetupPacket.wIndex & 0xFF) case 0x01 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP1_OUT, Buffer, 1); case 0x81 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP1_IN, Buffer, 1); case 0x02 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP2_OUT, Buffer, 1); case 0x82 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP2_IN, Buffer, 1); case 0x03 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP3_OUT, Buffer, 1); case 0x83 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP3_IN, Buffer, 1); default : /* Invalid Endpoint - RequestError */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, NULL, 0); else /* No other Features for Endpoint - Request Error */ Les requêtes SetFeature et ClearFeature sont utilisés pour positionner des fonctions spécifiques de terminaison. Le standard défini un sélecteur de fonction de terminaison : ENDPOINT_HALT. Nous vérifierons vers quelle terminaison la requête est dirigée et positionnerons/effacerons le bit STALL en conséquence. La fonction HALT n'est pas exigée sur les terminaisons par défaut. case GET_STATUS: /* Get Status Request to Endpoint should return */ /* Halt Status in D0 for Interrupt and Bulk */ switch (SetupPacket.wIndex & 0xFF) case 0x01 : D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP1_OUT, Buffer, 1); ACQUIER Bernard CHAP 7 Page 11/19 09/07/02
![It is not required nor recommended on the if (SetupPacket.wValue == ENDPOINT_HALT) if (SetupPacket.bRequest == CLEAR_FEATURE) Buffer[0] = 0x00; else Buffer[0] = 0x01; switch (SetupPacket.](/docs-images/47/13534550/images/page_12.jpg "wIndex & 0xFF) case 0x01 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP1_OUT, Buffer, 1); case 0x81 : D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + \ D11_ENDPOINT_EP1_IN, Buffer, 1); case")
13 case 0x81 : D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP1_IN, Buffer, 1); case 0x02 : D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP2_OUT, Buffer, 1); case 0x82 : D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP2_IN, Buffer, 1); case 0x03 : D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP3_OUT, Buffer, 1); case 0x83 : D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP3_IN, Buffer, 1); default : /* Invalid Endpoint - RequestError */ if (Buffer[0] & 0x08) Buffer[0] = 0x01; else Buffer[0] = 0x00; Buffer[1] = 0x00; D11WriteEndpoint(D11_ENDPOINT_EP0_IN, Buffer, 2); default: /* Unsupported - Request Error - Stall */ Quand la requête GetStatus est dirigée sur la terminaison, elle retourne l'état de terminaison, c'est à dire, si elle est arrêtée ou non. De même que pour la requête de fonction de positionnement/effacement ENDPOINT_HALT, nous avons juste besoin de rapporter l'état des terminaisons génériques (standards). Toutes les requêtes standard de terminaison non définies peuvent être manipulées par une erreur de requête USB. \ 0x07); case VENDOR_DEVICE_REQUEST: case VENDOR_ENDPOINT_REQUEST: printf("vendor Device brequest = 0x%X, wvalue = 0x%X, windex = 0x%X\n\r", SetupPacket.bRequest, SetupPacket.wValue, SetupPacket.wIndex); switch (SetupPacket.bRequest) case VENDOR_GET_ANALOG_VALUE: printf("get Analog Value, Channel %x :",SetupPacket.wIndex & ADCON0 = 0xC1 (SetupPacket.wIndex & 0x07) << 3; /* Wait Acquistion time of Sample and Hold */ for (a = 0; a <= 255; a++); ADGO = 1; while(adgo); Buffer[0] = ADRESL; Buffer[1] = ADRESH; ACQUIER Bernard CHAP 7 Page 12/19 09/07/02
![D11CmdDataRead(D11_READ_ENDPOINT_STATUS + \ D11_ENDPOINT_EP3_IN, Buffer, 1); default : /* Invalid Endpoint - RequestError */ if (Buffer[0] & 0x08) Buffer[0] = 0x01; else Buffer[0] = 0x00; Buffer[1] =](/docs-images/47/13534550/images/page_13.jpg "0x00; D11WriteEndpoint(D11_ENDPOINT_EP0_IN, Buffer, 2); default: /* Unsupported - Request Error - Stall */ Quand la requête GetStatus est dirigée sur la terminaison, elle retourne l'état de")
14 int)a%100); a = (Buffer[1] << 8) + Buffer[0]; a = (a * 500) / 1024; printf(" Value = %d.%02d\n\r",(unsigned int)a/100,(unsigned D11WriteEndpoint(D11_ENDPOINT_EP0_IN, Buffer, 2); Venons-en maintenant aux parties fonctionnelles de l'appareil USB. Les requêtes constructeur peuvent être imaginées par le concepteur. Nous avons imaginé 2 requêtes : VENDOR_GET_ANALOG_VALUE et VENDOR_SET_RB_HIGH_NIBBLE. VENDOR_GET_ANALOG_VALUE lit la valeur analogique de 10 bits du canal x imposé par windex. Elle est masquée avec 0x07 pour permettre 8 canaux possibles, supportant le PIC 16F877 plus grand si nécessaire. La valeur analogique est renvoyée dans un paquet de données de 2 octets. case VENDOR_SET_RB_HIGH_NIBBLE: printf("write High Nibble of PORTB\n\r"); PORTB = (PORTB & 0x0F) (SetupPacket.wIndex & 0xF0); D11WriteEndpoint(D11_ENDPOINT_EP0_IN, NULL, 0); default: VENDOR_SET_RB_HIGH_NIBBLE peut être utilisé pour positionner les bits factices de poids forts du PORTB[3:7]. default: printf("unsupported Request Type 0x%X\n\r",SetupPacket.bmRequestType); else printf("data Packet?\n\r"); /* This is a Data Packet */ Tous les types de requêtes non supportés tels que la requête de classe d'appareil, la requête de classe d'interface, etc. se traduiront par une erreur de requête USB. void GetDescriptor(PUSB_SETUP_REQUEST SetupPacket) switch((setuppacket->wvalue & 0xFF00) >> 8) case TYPE_DEVICE_DESCRIPTOR: printf("\n\rdevice Descriptor: Bytes Asked For %d, Size of Descriptor %d\n\r", \ SetupPacket->wLength,DeviceDescriptor.bLength); psendbuffer = (const unsigned char *)&DeviceDescriptor; BytesToSend = DeviceDescriptor.bLength; ACQUIER Bernard CHAP 7 Page 13/19 09/07/02

15 if (BytesToSend > SetupPacket->wLength) BytesToSend = SetupPacket->wLength; WriteBufferToEndPoint(); case TYPE_CONFIGURATION_DESCRIPTOR: printf("\n\rconfiguration Descriptor: Bytes Asked For %d, Size of Descriptor %d\n\r", \ SetupPacket->wLength, sizeof(configurationdescriptor)); psendbuffer = (const unsigned char *)&ConfigurationDescriptor; BytesToSend = sizeof(configurationdescriptor); if (BytesToSend > SetupPacket->wLength) BytesToSend = SetupPacket->wLength; WriteBufferToEndPoint(); Les requêtes GetDescriptor impliquent des réponses plus grandes que la taille maximale limite du paquet de 8 octets de la terminaison. Par conséquent elles doivent être scindées en morceaux de 8 octets. Les 2 requêtes d'appareil et de configuration chargent l'adresse des descripteurs pertinents dans psendbuffer et positionnent BytesToSend à la longueur du descripteur. La requête précisera aussi une longueur de descripteur dans wlength indiquant le maximum de données à envoyer. Dans chaque cas nous vérifions la longueur réelle par rapport à celle demandée par l'hôte et ajustons la taille si nécessaire. Ensuite nous appellerons WriteBufferToEndpoint qui charge les 8 premiers octets dans le tampon de terminaison et incrémenterons le pointeur qui sera prêt pour le prochain paquet de 8 octets. case TYPE_STRING_DESCRIPTOR: printf("\n\rstring Descriptor: LANGID = 0x%04x, Index %d\n\r", \ SetupPacket->wIndex, SetupPacket->wValue & 0xFF); switch (SetupPacket->wValue & 0xFF) case 0 : psendbuffer = (const unsigned char *)&LANGID_Descriptor; BytesToSend = sizeof(langid_descriptor); case 1 : psendbuffer = (const unsigned char *)&Manufacturer_Descriptor; BytesToSend = sizeof(manufacturer_descriptor); default : psendbuffer = NULL; BytesToSend = 0; if (BytesToSend > SetupPacket->wLength) BytesToSend = SetupPacket->wLength; WriteBufferToEndPoint(); Si des descripteurs de chaînes sont inclus, il doit y avoir la présence d'un descripteur de chaîne zéro qui détaille quelles langues sont supportées par l'appareil. N'importe quelle requête de chaînes différente de zéro a un language ID spécifié dans windex indiquant quelle langue est supportée. Dans notre cas nous trichons quelque peu et ignorons la valeur de windex (LANGID) en renvoyant la chaîne, quelle que soit la langue demandée. ACQUIER Bernard CHAP 7 Page 14/19 09/07/02

16 default: void ErrorStallControlEndPoint(void) unsigned char Buffer[] = 0x01 ; /* RequestError - return STALL PID in response to next DATA Stage Transaction */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP0_IN, Buffer, 1); /* or in the status stage of the message. */ D11CmdDataWrite(D11_SET_ENDPOINT_STATUS + D11_ENDPOINT_EP0_OUT, Buffer, 1); Quand nous rencontrons une requête invalide, un paramètre invalide ou une requête que l'appareil ne prend pas en charge, nous devons prendre compte d'une erreur de requête. Ceci est défini dans la spécification Une erreur de requête renverra un STALL PID en réponse à la prochaine transaction d'étape de données ou au cours de l'étape d'état du message.. Toutefois elle note que pour empêcher un trafic inutile sur le bus, l'erreur doit être reportée à la prochaine étape de données plutôt que d'attendre l'étape d'état. unsigned char D11ReadEndpoint(unsigned char Endpoint, unsigned char *Buffer) unsigned char D11Header[2]; unsigned char BufferStatus = 0; /* Select Endpoint */ D11CmdDataRead(Endpoint, &BufferStatus, 1); /* Check if Buffer is Full */ if(bufferstatus & 0x01) /* Read dummy header - D11 buffer pointer is incremented on each read */ /* and is only reset by a Select Endpoint Command */ D11CmdDataRead(D11_READ_BUFFER, D11Header, 2); if(d11header[1]) D11CmdDataRead(D11_READ_BUFFER, Buffer, D11Header[1]); /* Allow new packets to be accepted */ D11CmdDataWrite(D11_CLEAR_BUFFER, NULL, 0); return D11Header[1]; void D11WriteEndpoint(unsigned char Endpoint, const unsigned char *Buffer, unsigned char Bytes) unsigned char D11Header[2]; unsigned char BufferStatus = 0; D11Header[0] = 0x00; D11Header[1] = Bytes; /* Select Endpoint */ D11CmdDataRead(Endpoint, &BufferStatus, 1); /* Write Header */ D11CmdDataWrite(D11_WRITE_BUFFER, D11Header, 2); /* Write Packet */ if (Bytes) D11CmdDataWrite(D11_WRITE_BUFFER, Buffer, Bytes); /* Validate Buffer */ D11CmdDataWrite(D11_VALIDATE_BUFFER, NULL, 0); ACQUIER Bernard CHAP 7 Page 15/19 09/07/02

17 D11ReadEndpoint et D11WriteEndpoint sont des fonctions spécifiques au PDIUSBD11. Le PDIUSBD11 a 2 octets factices préfixant toute opération de lecture ou écriture de données. Le premier octet est réservé, tandis que le second octet indique le nombre d'octets reçus ou à transmettre. Ces 2 fonctions tiennent compte de cet en-tête. void WriteBufferToEndPoint(void) if (BytesToSend == 0) /* If BytesToSend is Zero and we get called again, assume buffer is smaller */ /* than Setup Request Size and indicate end by sending Zero Lenght packet */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, NULL, 0); else if (BytesToSend >= 8) /* Write another 8 Bytes to buffer and send */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, psendbuffer, 8); psendbuffer += 8; BytesToSend -= 8; else /* Buffer must have less than 8 bytes left */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, psendbuffer, BytesToSend); BytesToSend = 0; Comme nous l'avons mentionné précédemment, WriteBufferToEndpoint est responsable du chargement des données dans PDIUSBD11 en morceaux de 8 octets et de l'ajustement de la préparation des pointeurs pour le prochain paquet. Elle est appelée une fois par le programme de gestion de la requête pour charger les 8 premiers octets dans le tampon mémoire de la terminaison. L'hôte enverra donc un jeton IN, lira cette donnée et le PDIUSBD11 génèrera une interruption. Le programme de gestion de EP0 IN appellera donc WriteBufferToEndpoint pour charger le prochain paquet qui sera prêt pour le prochain jeton IN provenant de l'hôte. Un transfert est considéré comme complet si tous les octets requis ont été lus, si le paquet est reçu avec une charge utile inférieure à bmaxpacketsize ou si un paquet de longueur nul est renvoyé. Par conséquent si le compteur BytesToSend atteint zéro, nous pouvons présumer que les données à envoyer représentaient un multiple de 8 octets et que nous enverrons un paquet de longueur nul pour indiquer les dernières données. Toutefois, s'il nous reste moins de 8 octets à envoyer, nous enverrons seulement les octets restants. Il n'est pas nécessaire de rembourrer les données avec des zéros. void loadfromcircularbuffer(void) unsigned char Buffer[10]; unsigned char count; // Read Buffer Full Status D11CmdDataRead(D11_ENDPOINT_EP1_IN, Buffer, 1); if (Buffer[0] == 0) // Buffer Empty if (inpointer!= outpointer) // We have bytes to send count = 0; do Buffer[count++] = circularbuffer[outpointer++]; if (outpointer >= MAX_BUFFER_SIZE) outpointer = 0; if (outpointer == inpointer) // No more data while (count < 8); // Maximum Buffer Size ACQUIER Bernard CHAP 7 Page 16/19 09/07/02
; else if (BytesToSend >= 8) /* Write another 8 Bytes to buffer and send */ D11WriteEndpoint(D11_ENDPOINT_EP0_IN, psendbuffer, 8);")
18 // Now load it into EP1_In D11WriteEndpoint(D11_ENDPOINT_EP1_IN, Buffer, count); La routine loadfromcircularbuffer() gère le chargement de données dans le tampon mémoire de la terminaison EP0 IN. On y fait normalement appel après une interruption EP0 IN pour recharger le tampon mémoire afin d'être prêt pour le prochain jeton IN sur EP1. Cependant afin d'envoyer le premier paquet, nous avons besoin de charger les données avant la réception de l'interruption EP1 IN. Par conséquent on fait aussi appel à la routine après que les données soient reçues sur EP1 OUT. En appelant aussi la routine du programme de gestion de EP0 OUT, nous pouvons facilement écraser les données dans le tampon IN sans se préoccuper si elles ont été envoyées ou pas. Pour empêcher ceci, nous déterminons si le tampon mémoire EP1 IN est vide, avant de tenter de le recharger avec de nouvelles données. void D11CmdDataWrite(unsigned char Command, const unsigned char *Buffer, unsigned char Count) I2C_Write(D11_CMD_ADDR, &Command, 1); if(count) I2C_Write(D11_DATA_ADDR_WRITE, Buffer, Count); void D11CmdDataRead(unsigned char Command, unsigned char Buffer[], unsigned char Count) I2C_Write(D11_CMD_ADDR, &Command, 1); if(count) I2C_Read(D11_DATA_ADDR_READ, Buffer, Count); D11CmdDataWrite et D11CmdDataRead sont 2 fonctions spécifiques au PDIUSBD11 qui sont responsables de l'envoi de l'adresse/commande I2C en premier puis de l'envoi ou de la reception des données sur le bus I2C. Des fonctions bas niveau supplémentaires sont incluses dans le code source mais ne sont pas reproduites ici du fait de l'intention de se focaliser sur les détails spécifiques de l'usb. Cet exemple peut être utilisé avec l'exemple bulkusb.sys comme faisant partie de la DDK de windows. Pour charger le driver bulkusb.sys, soit vous changez le code pour l'identifier avec un VID de 0x045E et un PID de 0x930A ou bien vous changez le fichier bulkusb.inf accompagnant bulkusb.sys pour correspondre à la combinaison VID/PID que vous utilisez dans cet exemple. Il est alors possible d'utiliser le programme utilisateur en mode console, rwbulk.exe pour envoyer et recevoir des paquets du tampon mémoire circulaire. Utiliser: rwbulk -r 80 -w 80 -c 1 -i 1 -o 0 pour envoyer des morceaux de données de 80 octets au PIC16F876. L'utilisation de charges utiles supérieures à 80 octets fera déborder le tampon mémoire circulaire de banque1 du PIC. Cet exemple a été codé pour une lisibilité au détriment de la taille du code. La compilation vaut 3250 mots de la Flash (39% de la capacité du pic 16F876). ACQUIER Bernard CHAP 7 Page 17/19 09/07/02

19 Décharger le code source. Version 1.2, 15ko. Historique des révisions: 6 Avril Version Accroissemnt de la vitesse I2C pour correspondre au commentaire. Amélioration du traitement de l'irq PDIUSBD11. Le programme de gestion des routines en Bloc de EP1 IN et EP1 OUT et la possibilité de charger des descripteurs à partir de la Flash. révision a été ajouté. 31 Decembre Version 1.0. Reconnaissance: Une reconnaissance speciale à Michael DeVault de DeVaSys Embedded Systems. Cet exemple a été basé sur le code de Michael et dévellopé sans effort sur la carte de dévelloppement USB de DeVaSys: USBLPT-PD11 avant d'être porté sur le PIC. ACQUIER Bernard CHAP 7 Page 18/19 09/07/02

BM Le bus USB 09/05/2013. Le Port USB
 Le Port USB 1 USB : Universal Serial Bus L'Universal Serial Bus (USB) est un bus informatique (série synchrone), il sert à brancher des périphériques informatiques à un hôte (ordinateur). 1)Historique
Le Port USB 1 USB : Universal Serial Bus L'Universal Serial Bus (USB) est un bus informatique (série synchrone), il sert à brancher des périphériques informatiques à un hôte (ordinateur). 1)Historique
Ordinateurs, Structure et Applications
 Ordinateurs, Structure et Applications Cours 10, Les interruptions Etienne Tremblay Université Laval, Hiver 2012 Cours 10, p.1 Les interruptions du 8086 Une interruption interrompt l exécution séquentielle
Ordinateurs, Structure et Applications Cours 10, Les interruptions Etienne Tremblay Université Laval, Hiver 2012 Cours 10, p.1 Les interruptions du 8086 Une interruption interrompt l exécution séquentielle
Ordinateurs, Structure et Applications
 Ordinateurs, Structure et Applications Cours 19, Le USB Etienne Tremblay Université Laval, Hiver 2012 Cours 19, p.1 USB signifie Universal Serial Bus USB Le USB a été conçu afin de remplacer le port série
Ordinateurs, Structure et Applications Cours 19, Le USB Etienne Tremblay Université Laval, Hiver 2012 Cours 19, p.1 USB signifie Universal Serial Bus USB Le USB a été conçu afin de remplacer le port série
Le bus USB. I) Introduction : II) Architecture du bus USB :
 Introduction : II) Architecture du bus USB :") Le bus USB I) Introduction : Le bus USB est comme son nom l'indique un bus série (Universal Serial Bus). Le bus USB s'est répandu de façon très significative ces dernières années, que ce soit dans les
Le bus USB I) Introduction : Le bus USB est comme son nom l'indique un bus série (Universal Serial Bus). Le bus USB s'est répandu de façon très significative ces dernières années, que ce soit dans les
NOTICE INSTALLATION. ARCHANGE Email Simplex Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE
 NOTICE INSTALLATION ARCHANGE Email Simplex Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE Date Version Marque de révision Rédaction 31/07/2012 1 - Nicolas AUBLIN 1) PRINCIPE DE FONCTIONNEMENT...
NOTICE INSTALLATION ARCHANGE Email Simplex Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE Date Version Marque de révision Rédaction 31/07/2012 1 - Nicolas AUBLIN 1) PRINCIPE DE FONCTIONNEMENT...
La programmation des PIC en C. Les fonctions, les interruptions.
 La programmation des PIC en C Les fonctions, les interruptions. Réalisation : HOLLARD Hervé. http://electronique-facile.com Date : 26 août 2004 Révision : 1.2 Sommaire Sommaire... 2 Introduction... 3 Structure
La programmation des PIC en C Les fonctions, les interruptions. Réalisation : HOLLARD Hervé. http://electronique-facile.com Date : 26 août 2004 Révision : 1.2 Sommaire Sommaire... 2 Introduction... 3 Structure
Description du logiciel Modbus RTU
 Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 1 de 57 Description du logiciel Modbus RTU Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 2 de 57 Sommaire Description
Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 1 de 57 Description du logiciel Modbus RTU Description du logiciel Modbus RTU V.1.0 Actualisée 04/2014 Page 2 de 57 Sommaire Description
1. Structure d un programme C. 2. Commentaire: /*..texte */ On utilise aussi le commentaire du C++ qui est valable pour C: 3.
 1. Structure d un programme C Un programme est un ensemble de fonctions. La fonction "main" constitue le point d entrée pour l exécution. Un exemple simple : #include int main() { printf ( this
1. Structure d un programme C Un programme est un ensemble de fonctions. La fonction "main" constitue le point d entrée pour l exécution. Un exemple simple : #include int main() { printf ( this
NanoSense. Protocole Modbus de la sonde Particules P4000. (Version 01F)
") NanoSense 123 rue de Bellevue, 92100 Boulogne Billancourt France Tél : 33-(0) 1 41 41 00 02, fax : 33-(0) 1 41 41 06 72 Protocole Modbus de la sonde Particules P4000 (Version 01F) Ver V01A V01B V01C V01D
NanoSense 123 rue de Bellevue, 92100 Boulogne Billancourt France Tél : 33-(0) 1 41 41 00 02, fax : 33-(0) 1 41 41 06 72 Protocole Modbus de la sonde Particules P4000 (Version 01F) Ver V01A V01B V01C V01D
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
REALISATION d'un. ORDONNANCEUR à ECHEANCES
 REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
REALISATION d'un ORDONNANCEUR à ECHEANCES I- PRÉSENTATION... 3 II. DESCRIPTION DU NOYAU ORIGINEL... 4 II.1- ARCHITECTURE... 4 II.2 - SERVICES... 4 III. IMPLÉMENTATION DE L'ORDONNANCEUR À ÉCHÉANCES... 6
NOTICE INSTALLATION. ARCHANGE WebDAV Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE
 NOTICE INSTALLATION ARCHANGE WebDAV Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE Date Version Marque de révision Rédaction 02/08/2012 3 - Benjamin VERGUET Nicolas AUBLIN 1) PRINCIPE DE FONCTIONNEMENT...
NOTICE INSTALLATION ARCHANGE WebDAV Office N&B/Couleur KONICA MINOLTA BUSINESS SOLUTIONS FRANCE Date Version Marque de révision Rédaction 02/08/2012 3 - Benjamin VERGUET Nicolas AUBLIN 1) PRINCIPE DE FONCTIONNEMENT...
Stockage du fichier dans une table mysql:
 Stockage de fichiers dans des tables MYSQL avec PHP Rédacteur: Alain Messin CNRS UMS 2202 Admin06 30/06/2006 Le but de ce document est de donner les principes de manipulation de fichiers dans une table
Stockage de fichiers dans des tables MYSQL avec PHP Rédacteur: Alain Messin CNRS UMS 2202 Admin06 30/06/2006 Le but de ce document est de donner les principes de manipulation de fichiers dans une table
INITIATION AU LANGAGE C SUR PIC DE MICROSHIP
 COURS PROGRAMMATION INITIATION AU LANGAGE C SUR MICROCONTROLEUR PIC page 1 / 7 INITIATION AU LANGAGE C SUR PIC DE MICROSHIP I. Historique du langage C 1972 : naissance du C dans les laboratoires BELL par
COURS PROGRAMMATION INITIATION AU LANGAGE C SUR MICROCONTROLEUR PIC page 1 / 7 INITIATION AU LANGAGE C SUR PIC DE MICROSHIP I. Historique du langage C 1972 : naissance du C dans les laboratoires BELL par
Surveillance de Scripts LUA et de réception d EVENT. avec LoriotPro Extended & Broadcast Edition
 Surveillance de Scripts LUA et de réception d EVENT avec LoriotPro Extended & Broadcast Edition L objectif de ce document est de présenter une solution de surveillance de processus LUA au sein de la solution
Surveillance de Scripts LUA et de réception d EVENT avec LoriotPro Extended & Broadcast Edition L objectif de ce document est de présenter une solution de surveillance de processus LUA au sein de la solution
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE
 EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
EPREUVE OPTIONNELLE d INFORMATIQUE CORRIGE QCM Remarque : - A une question correspond au moins 1 réponse juste - Cocher la ou les bonnes réponses Barème : - Une bonne réponse = +1 - Pas de réponse = 0
Guide d'installation rapide TFM-560X YO.13
 Guide d'installation rapide TFM-560X YO.13 Table of Contents Français 1 1. Avant de commencer 1 2. Procéder à l'installation 2 Troubleshooting 6 Version 06.08.2011 16. Select Install the software automatically
Guide d'installation rapide TFM-560X YO.13 Table of Contents Français 1 1. Avant de commencer 1 2. Procéder à l'installation 2 Troubleshooting 6 Version 06.08.2011 16. Select Install the software automatically
Interface PC Vivago Ultra. Pro. Guide d'utilisation
 Interface PC Vivago Ultra Pro Guide d'utilisation Version 1.03 Configuration de l'interface PC Vivago Ultra Configuration requise Avant d'installer Vivago Ultra sur votre ordinateur assurez-vous que celui-ci
Interface PC Vivago Ultra Pro Guide d'utilisation Version 1.03 Configuration de l'interface PC Vivago Ultra Configuration requise Avant d'installer Vivago Ultra sur votre ordinateur assurez-vous que celui-ci
Contents Windows 8.1... 2
 Workaround: Installation of IRIS Devices on Windows 8 Contents Windows 8.1... 2 English Français Windows 8... 13 English Français Windows 8.1 1. English Before installing an I.R.I.S. Device, we need to
Workaround: Installation of IRIS Devices on Windows 8 Contents Windows 8.1... 2 English Français Windows 8... 13 English Français Windows 8.1 1. English Before installing an I.R.I.S. Device, we need to
Durée estimée :1 journée Date de la réalisation : 2011. Description Fournisseur Référence Nombre PU HT LM35CZ, LM35AZ LM35DZ
 001 Titre : Mesure de température interfacée par carte Arduino Type de réalisation : montage électronique, de surveillance de température Concepteur : C. Rouviere Coordonnées : Laboratoire lbv villefranche/mer
001 Titre : Mesure de température interfacée par carte Arduino Type de réalisation : montage électronique, de surveillance de température Concepteur : C. Rouviere Coordonnées : Laboratoire lbv villefranche/mer
CONVERTISSEUR RS 232/485 NOTICE
 CONVERTISSEUR RS 232/485 068745 068745 NOTICE Ce convertisseur TCP/IP permet de convertir tous équipements à liaison série et de les superviser sur un réseau LAN. Sommaire 1 Description du produit...2
CONVERTISSEUR RS 232/485 068745 068745 NOTICE Ce convertisseur TCP/IP permet de convertir tous équipements à liaison série et de les superviser sur un réseau LAN. Sommaire 1 Description du produit...2
Conception et développement d'un périphérique USB pour le simulateur de vol Microsoft Flight Simulator
 Conception et développement d'un périphérique USB pour le simulateur de vol Microsoft Flight Simulator Ing. D. ROLIN ECAM Bruxelles Normalement, les instruments de bord du simulateur de vol sont contrôlés
Conception et développement d'un périphérique USB pour le simulateur de vol Microsoft Flight Simulator Ing. D. ROLIN ECAM Bruxelles Normalement, les instruments de bord du simulateur de vol sont contrôlés
Instructions Mozilla Thunderbird Page 1
 Instructions Mozilla Thunderbird Page 1 Instructions Mozilla Thunderbird Ce manuel est écrit pour les utilisateurs qui font déjà configurer un compte de courrier électronique dans Mozilla Thunderbird et
Instructions Mozilla Thunderbird Page 1 Instructions Mozilla Thunderbird Ce manuel est écrit pour les utilisateurs qui font déjà configurer un compte de courrier électronique dans Mozilla Thunderbird et
Instructions pour mettre à jour un HFFv2 v1.x.yy v2.0.00
 Instructions pour mettre à jour un HFFv2 v1.x.yy v2.0.00 HFFv2 1. OBJET L accroissement de la taille de code sur la version 2.0.00 a nécessité une évolution du mapping de la flash. La conséquence de ce
Instructions pour mettre à jour un HFFv2 v1.x.yy v2.0.00 HFFv2 1. OBJET L accroissement de la taille de code sur la version 2.0.00 a nécessité une évolution du mapping de la flash. La conséquence de ce
DOCUMENTATION - FRANCAIS... 2
 DOCUMENTATION MODULE SHOPDECORATION MODULE PRESTASHOP CREE PAR PRESTACREA INDEX : DOCUMENTATION - FRANCAIS... 2 INSTALLATION... 2 Installation automatique... 2 Installation manuelle... 2 Résolution des
DOCUMENTATION MODULE SHOPDECORATION MODULE PRESTASHOP CREE PAR PRESTACREA INDEX : DOCUMENTATION - FRANCAIS... 2 INSTALLATION... 2 Installation automatique... 2 Installation manuelle... 2 Résolution des
Java Licence Professionnelle CISII, 2009-10
 Java Licence Professionnelle CISII, 2009-10 Cours 4 : Programmation structurée (c) http://www.loria.fr/~tabbone/cours.html 1 Principe - Les méthodes sont structurées en blocs par les structures de la programmation
Java Licence Professionnelle CISII, 2009-10 Cours 4 : Programmation structurée (c) http://www.loria.fr/~tabbone/cours.html 1 Principe - Les méthodes sont structurées en blocs par les structures de la programmation
Cahier des charges. driver WIFI pour chipset Ralink RT2571W. sur hardware ARM7
 Cahier des charges driver WIFI pour chipset Ralink RT2571W sur hardware ARM7 RevA 13/03/2006 Création du document Sylvain Huet RevB 16/03/2006 Fusion des fonctions ARP et IP. SH Modification des milestones
Cahier des charges driver WIFI pour chipset Ralink RT2571W sur hardware ARM7 RevA 13/03/2006 Création du document Sylvain Huet RevB 16/03/2006 Fusion des fonctions ARP et IP. SH Modification des milestones
LOGICIEL D'ADMINISTRATION POUR E4000 & G4000 MANAGEMENT SOFTWARE FOR E4000 & G4000
 LOGICIEL D'ADMINISTRATION POUR E4000 & G4000 MANAGEMENT SOFTWARE FOR E4000 & G4000 TABLE DES MATIÈRES TITRE PAGE Présentation - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -4 Le
LOGICIEL D'ADMINISTRATION POUR E4000 & G4000 MANAGEMENT SOFTWARE FOR E4000 & G4000 TABLE DES MATIÈRES TITRE PAGE Présentation - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -4 Le
eps Network Services Alarmes IHM
 09/2005 Alarmes IHM eps Network Services Alarmes IHM Instructions de diagnostic Valable pour : Logiciel Version de logiciel eps Network Services 4.1 eps Network Services, Instructions de diagnostic (DA)
09/2005 Alarmes IHM eps Network Services Alarmes IHM Instructions de diagnostic Valable pour : Logiciel Version de logiciel eps Network Services 4.1 eps Network Services, Instructions de diagnostic (DA)
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
PIC EVAL Dev Board PIC18F97J60
 PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
PIC EVAL Dev Board PIC18F97J60 2 TP1 : Prise en main de l environnement de programmation pour la carte PIC EVAL-ANFA Pour répondre aux questions et justifier vos réponses, vous pouvez faire des copies
Exercices sur SQL server 2000
 Exercices sur SQL server 2000 La diagramme de classe : Exercices sur SQL server 2000 Le modèle relationnel correspondant : 1 Créer les tables Clic-droit on Tables et choisir «New Table» Créer la table
Exercices sur SQL server 2000 La diagramme de classe : Exercices sur SQL server 2000 Le modèle relationnel correspondant : 1 Créer les tables Clic-droit on Tables et choisir «New Table» Créer la table
Guide d'installation et de configuration de Pervasive.SQL 7 dans un environnement réseau Microsoft Windows NT
 Guide d'installation et de configuration de Pervasive.SQL 7 dans un environnement réseau Microsoft Windows NT Ce guide explique les différentes étapes de l installation et de la configuration des composantes
Guide d'installation et de configuration de Pervasive.SQL 7 dans un environnement réseau Microsoft Windows NT Ce guide explique les différentes étapes de l installation et de la configuration des composantes
Programmation en langage C d un µcontrôleur PIC à l aide du compilateur C-CCS Sommaire
 Programmation en langage C d un µcontrôleur PIC à l aide du compilateur C-CCS CCS Sommaire Généralités sur le langage. 2 Structure d un programme en C.. 3 Les constantes et équivalences.. 4 Les variables...
Programmation en langage C d un µcontrôleur PIC à l aide du compilateur C-CCS CCS Sommaire Généralités sur le langage. 2 Structure d un programme en C.. 3 Les constantes et équivalences.. 4 Les variables...
STS SE. FreeRTOS. Programmation réseau WIFI. Programmation réseau. Socket Tcp. FlyPort smart Wi-Fi 802.11 module
 François SCHNEIDER Lycée Victor-Hugo BESANÇON. STS SE FreeRTOS Programmation réseau WIFI Programmation réseau Socket Tcp FlyPort smart Wi-Fi 802.11 module Prérequis : langage C, connaissance réseau : Ip,
François SCHNEIDER Lycée Victor-Hugo BESANÇON. STS SE FreeRTOS Programmation réseau WIFI Programmation réseau Socket Tcp FlyPort smart Wi-Fi 802.11 module Prérequis : langage C, connaissance réseau : Ip,
TP n 2 Concepts de la programmation Objets Master 1 mention IL, semestre 2 Le type Abstrait Pile
 TP n 2 Concepts de la programmation Objets Master 1 mention IL, semestre 2 Le type Abstrait Pile Dans ce TP, vous apprendrez à définir le type abstrait Pile, à le programmer en Java à l aide d une interface
TP n 2 Concepts de la programmation Objets Master 1 mention IL, semestre 2 Le type Abstrait Pile Dans ce TP, vous apprendrez à définir le type abstrait Pile, à le programmer en Java à l aide d une interface
Alcatel OmniPCX Enterprise TSC-IP V1 (4098RE)
") Alcatel OmniPCX Enterprise TSC-IP V1 (4098RE) NOTE : Les spécifications Produit contenues dans ce document peuvent évoluer sans information préalable. Les produits et services décrits dans ce document
Alcatel OmniPCX Enterprise TSC-IP V1 (4098RE) NOTE : Les spécifications Produit contenues dans ce document peuvent évoluer sans information préalable. Les produits et services décrits dans ce document
Guide de l'utilisateur. Linksys AE1000 Adaptateur USB sans fil - N hautes performances
 Guide de l'utilisateur Linksys AE1000 Adaptateur USB sans fil - N hautes performances Table des matières Table des matières Chapitre 1 : Présentation du produit 1 Voyant 1 Chapitre 2 : Installation 2 Installation
Guide de l'utilisateur Linksys AE1000 Adaptateur USB sans fil - N hautes performances Table des matières Table des matières Chapitre 1 : Présentation du produit 1 Voyant 1 Chapitre 2 : Installation 2 Installation
WEB page builder and server for SCADA applications usable from a WEB navigator
 Générateur de pages WEB et serveur pour supervision accessible à partir d un navigateur WEB WEB page builder and server for SCADA applications usable from a WEB navigator opyright 2007 IRAI Manual Manuel
Générateur de pages WEB et serveur pour supervision accessible à partir d un navigateur WEB WEB page builder and server for SCADA applications usable from a WEB navigator opyright 2007 IRAI Manual Manuel
Guide pour l Installation des Disques Durs SATA et Configuration RAID
 Guide pour l Installation des Disques Durs SATA et Configuration RAID 1. Guide pour l Installation des Disques Durs SATA.. 2 1.1 Installation de disques durs Série ATA (SATA).. 2 1.2 Créer une disquette
Guide pour l Installation des Disques Durs SATA et Configuration RAID 1. Guide pour l Installation des Disques Durs SATA.. 2 1.1 Installation de disques durs Série ATA (SATA).. 2 1.2 Créer une disquette
.NET - Classe de Log
 .NET - Classe de Log Classe permettant de Logger des données Text Dans tous les projets, il est indispensable de pouvoir stocker de l'information textuelle : Pour le suivi des erreurs Pour le suivi de
.NET - Classe de Log Classe permettant de Logger des données Text Dans tous les projets, il est indispensable de pouvoir stocker de l'information textuelle : Pour le suivi des erreurs Pour le suivi de
Temps Réel. Jérôme Pouiller <[email protected]> Septembre 2011
 Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Skype (v2.5) Protocol Data Structures (French) Author : Ouanilo MEDEGAN http://www.oklabs.net
 Protocol Data Structures (French) Author : Ouanilo MEDEGAN http://www.oklabs.net") Skype (v2.5) Protocol Data Structures (French) Author : Ouanilo MEDEGAN http://www.oklabs.net : Champ Encodé SKWRITTEN() : Champ Variable défini Précédemment & définissant l état des champs à suivre ECT
Skype (v2.5) Protocol Data Structures (French) Author : Ouanilo MEDEGAN http://www.oklabs.net : Champ Encodé SKWRITTEN() : Champ Variable défini Précédemment & définissant l état des champs à suivre ECT
GSM/GPRS/GPS Traceur Véhicule G-1000 PRO Manuel D utilisation
 GSM/GPRS/GPS Traceur Véhicule G-1000 PRO Manuel D utilisation Version 1.0 Page 1 of 15 Table des matières Chapitre I - préface 1.1 Aperçu 1.2 Fonctions principales 1.1.1 Positionnement et Suivi 1.1.2 Déclenchement
GSM/GPRS/GPS Traceur Véhicule G-1000 PRO Manuel D utilisation Version 1.0 Page 1 of 15 Table des matières Chapitre I - préface 1.1 Aperçu 1.2 Fonctions principales 1.1.1 Positionnement et Suivi 1.1.2 Déclenchement
Internet Group Management Protocol (IGMP) Multicast Listener Discovery ( MLD ) RFC 2710 (MLD version 1) RFC 3810 (MLD version 2)
 Multicast Listener Discovery ( MLD ) RFC 2710 (MLD version 1) RFC 3810 (MLD version 2)") Internet Group Management Protocol (IGMP) Multicast Listener Discovery ( MLD ) RFC 2710 (MLD version 1) RFC 3810 (MLD version 2) multicast applications Site NREN MLD / IGMP IGMP v2 : generality Interaction
Internet Group Management Protocol (IGMP) Multicast Listener Discovery ( MLD ) RFC 2710 (MLD version 1) RFC 3810 (MLD version 2) multicast applications Site NREN MLD / IGMP IGMP v2 : generality Interaction
Conception de circuits numériques et architecture des ordinateurs
 Conception de circuits numériques et architecture des ordinateurs Frédéric Pétrot Année universitaire 2014-2015 Structure du cours C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 Codage des nombres en base 2, logique
Conception de circuits numériques et architecture des ordinateurs Frédéric Pétrot Année universitaire 2014-2015 Structure du cours C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 Codage des nombres en base 2, logique
4. Groupement d objets
 Conception objet en Java avec BlueJ une approche interactive 4. Groupement d objets Collections et itérateurs David J. Barnes, Michael Kölling version française: Patrice Moreaux Rédigé avec 1.0 Principaux
Conception objet en Java avec BlueJ une approche interactive 4. Groupement d objets Collections et itérateurs David J. Barnes, Michael Kölling version française: Patrice Moreaux Rédigé avec 1.0 Principaux
Outils d'analyse de la sécurité des réseaux. HADJALI Anis VESA Vlad
 Outils d'analyse de la sécurité des réseaux HADJALI Anis VESA Vlad Plan Introduction Scanneurs de port Les systèmes de détection d'intrusion (SDI) Les renifleurs (sniffer) Exemples d'utilisation Conclusions
Outils d'analyse de la sécurité des réseaux HADJALI Anis VESA Vlad Plan Introduction Scanneurs de port Les systèmes de détection d'intrusion (SDI) Les renifleurs (sniffer) Exemples d'utilisation Conclusions
 Licence ST Université Claude Bernard Lyon I LIF1 : Algorithmique et Programmation C Bases du langage C 1 Conclusion de la dernière fois Introduction de l algorithmique générale pour permettre de traiter
Licence ST Université Claude Bernard Lyon I LIF1 : Algorithmique et Programmation C Bases du langage C 1 Conclusion de la dernière fois Introduction de l algorithmique générale pour permettre de traiter
Software and Hardware Datasheet / Fiche technique du logiciel et du matériel
 Software and Hardware Datasheet / Fiche technique du logiciel et du matériel 1 System requirements Windows Windows 98, ME, 2000, XP, Vista 32/64, Seven 1 Ghz CPU 512 MB RAM 150 MB free disk space 1 CD
Software and Hardware Datasheet / Fiche technique du logiciel et du matériel 1 System requirements Windows Windows 98, ME, 2000, XP, Vista 32/64, Seven 1 Ghz CPU 512 MB RAM 150 MB free disk space 1 CD
Paxton. ins-20605. Net2 desktop reader USB
 Paxton ins-20605 Net2 desktop reader USB 1 3 2 4 1 2 Desktop Reader The desktop reader is designed to sit next to the PC. It is used for adding tokens to a Net2 system and also for identifying lost cards.
Paxton ins-20605 Net2 desktop reader USB 1 3 2 4 1 2 Desktop Reader The desktop reader is designed to sit next to the PC. It is used for adding tokens to a Net2 system and also for identifying lost cards.
PROGRAMMATION D'UN MICROCONTRÔLEUR
 Projet de Physique P6-3 STPI/P6-3/2009 44 PROGRAMMATION D'UN MICROCONTRÔLEUR Etudiants : Pierre HOUSSIN Peng GE Aël GAIN Enseignant-responsable du projet : Faouzi DHAOUADI Date de remise du rapport :
Projet de Physique P6-3 STPI/P6-3/2009 44 PROGRAMMATION D'UN MICROCONTRÔLEUR Etudiants : Pierre HOUSSIN Peng GE Aël GAIN Enseignant-responsable du projet : Faouzi DHAOUADI Date de remise du rapport :
Summary / Sommaire. 1 Install DRIVER SR2 USB01 Windows seven 64 bits / Installation du DRIVER SR2 USB01 Windows seven 64 bits 2
 Summary / Sommaire 1 Install DRIVER SR2 USB01 Windows seven 64 bits / Installation du DRIVER SR2 USB01 Windows seven 64 bits 2 1.1 Driver Installation SR2 USB01 Windows Seven 64 bits (english) 2 1.1.1
Summary / Sommaire 1 Install DRIVER SR2 USB01 Windows seven 64 bits / Installation du DRIVER SR2 USB01 Windows seven 64 bits 2 1.1 Driver Installation SR2 USB01 Windows Seven 64 bits (english) 2 1.1.1
AMICUS 18 (2ème partie) 4) Présentation du logiciel Amicus IDE
 4) Présentation du logiciel Amicus IDE") AMICUS 18 (2ème partie) Dans la première partie, nous avions présenté la platine Amicus 18 et nous avions réalisé quelques montages simples. Nous allons découvrir un peu mieux la programmation. Dans la
AMICUS 18 (2ème partie) Dans la première partie, nous avions présenté la platine Amicus 18 et nous avions réalisé quelques montages simples. Nous allons découvrir un peu mieux la programmation. Dans la
Info0101 Intro. à l'algorithmique et à la programmation. Cours 3. Le langage Java
 Info0101 Intro. à l'algorithmique et à la programmation Cours 3 Le langage Java Pierre Delisle, Cyril Rabat et Christophe Jaillet Université de Reims Champagne-Ardenne Département de Mathématiques et Informatique
Info0101 Intro. à l'algorithmique et à la programmation Cours 3 Le langage Java Pierre Delisle, Cyril Rabat et Christophe Jaillet Université de Reims Champagne-Ardenne Département de Mathématiques et Informatique
L USB ET SA NORME. Ce document en est à sa première version au 21 septembre 2002
 L USB ET SA NORME Ce document à pour but d aider les personnes qui souhaitent se familiariser avec le bus USB. Ce document, très sommaire en fait, vu la complexité de cette norme, n a pas du tout la prétention
L USB ET SA NORME Ce document à pour but d aider les personnes qui souhaitent se familiariser avec le bus USB. Ce document, très sommaire en fait, vu la complexité de cette norme, n a pas du tout la prétention
L'univers simple des appareils intelligents
 L'univers simple des appareils intelligents Merci d'avoir choisi le HUAWEI Mobile WiFi Les fonctions prises en charge et l'apparence dépendent du modèle que vous avez acheté. Les illustrations suivantes
L'univers simple des appareils intelligents Merci d'avoir choisi le HUAWEI Mobile WiFi Les fonctions prises en charge et l'apparence dépendent du modèle que vous avez acheté. Les illustrations suivantes
Programmer en JAVA. par Tama ([email protected]( [email protected])
") Programmer en JAVA par Tama ([email protected]( [email protected]) Plan 1. Présentation de Java 2. Les bases du langage 3. Concepts avancés 4. Documentation 5. Index des mots-clés 6. Les erreurs fréquentes
Programmer en JAVA par Tama ([email protected]( [email protected]) Plan 1. Présentation de Java 2. Les bases du langage 3. Concepts avancés 4. Documentation 5. Index des mots-clés 6. Les erreurs fréquentes
Utiliser une WebCam. Micro-ordinateurs, informations, idées, trucs et astuces
 Micro-ordinateurs, informations, idées, trucs et astuces Utiliser une WebCam Auteur : François CHAUSSON Date : 8 février 2008 Référence : utiliser une WebCam.doc Préambule Voici quelques informations utiles
Micro-ordinateurs, informations, idées, trucs et astuces Utiliser une WebCam Auteur : François CHAUSSON Date : 8 février 2008 Référence : utiliser une WebCam.doc Préambule Voici quelques informations utiles
Contraintes, particularités. 1. Généralités... 2. 2. Gestion de la mémoire... 2. a. Type des variables et constantes... 2
 C Embarque Contraintes, particularités 1. Généralités... 2 2. Gestion de la mémoire... 2 a. Type des variables et constantes.... 2 b. Variables locales ou globales... 3 3. Interruptions... 5 4. Imposer
C Embarque Contraintes, particularités 1. Généralités... 2 2. Gestion de la mémoire... 2 a. Type des variables et constantes.... 2 b. Variables locales ou globales... 3 3. Interruptions... 5 4. Imposer
Installation FollowMe Q server
 Installation FollowMe Q server FollowMe Rev 1.00 30 nov 2007 Pré requis FollowMe v5 est un service de Windows et s'installe sur tout poste fonctionnant sous XP Pro, 2000 server, 2003 server. Il utilise
Installation FollowMe Q server FollowMe Rev 1.00 30 nov 2007 Pré requis FollowMe v5 est un service de Windows et s'installe sur tout poste fonctionnant sous XP Pro, 2000 server, 2003 server. Il utilise
Vanilla : Virtual Box
 Vanilla : Virtual Box Installation Guide for Virtual Box appliance Guide d'installation de l'application VirtualBox Vanilla Charles Martin et Patrick Beaucamp BPM Conseil Contact : [email protected],
Vanilla : Virtual Box Installation Guide for Virtual Box appliance Guide d'installation de l'application VirtualBox Vanilla Charles Martin et Patrick Beaucamp BPM Conseil Contact : [email protected],
Dossier technique. Présentation du bus DMX et Utilisation des options EL13 / EL14 ERM AUTOMATISMES INDUSTRIELS 1 LE PROTOCOLE DMX 2
 ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : [email protected] 1
ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : [email protected] 1
Problème physique. CH5 Administration centralisée
 CH5 Administration centralisée Problème physique L administrateur a un poste de travail Parfois pour plusieurs sites Une salle de serveurs est bruyante Machines sans interface (ex: routeur) Solutions Telnet
CH5 Administration centralisée Problème physique L administrateur a un poste de travail Parfois pour plusieurs sites Une salle de serveurs est bruyante Machines sans interface (ex: routeur) Solutions Telnet
Boîtier pour disque dur externe 3,5" (8,89cm) USB 2.0
 USB 2.0") Boîtier pour disque dur externe 3,5" (8,89cm) USB 2.0 Guide d'utilisation DA-71051 Avant-propos Nous tenons à vous féliciter d'avoir choisi l'un de nos produits! Nous allons vous montrer un nouveau concept
Boîtier pour disque dur externe 3,5" (8,89cm) USB 2.0 Guide d'utilisation DA-71051 Avant-propos Nous tenons à vous féliciter d'avoir choisi l'un de nos produits! Nous allons vous montrer un nouveau concept
4. Outils pour la synchronisation F. Boyer, Laboratoire Lig [email protected]
 4. Outils pour la synchronisation F. Boyer, Laboratoire Lig [email protected] Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
4. Outils pour la synchronisation F. Boyer, Laboratoire Lig [email protected] Le problème Insuffisance des solutions de base (verrous) Les solutions de plus haut niveau Les Sémaphores Les Moniteurs
DOCUMENTATION - FRANCAIS... 2
 DOCUMENTATION MODULE CATEGORIESTOPMENU MODULE CREE PAR PRESTACREA INDEX : DOCUMENTATION - FRANCAIS... 2 INSTALLATION... 2 CONFIGURATION... 2 LICENCE ET COPYRIGHT... 3 SUPPORT TECHNIQUE ET MISES A JOUR...
DOCUMENTATION MODULE CATEGORIESTOPMENU MODULE CREE PAR PRESTACREA INDEX : DOCUMENTATION - FRANCAIS... 2 INSTALLATION... 2 CONFIGURATION... 2 LICENCE ET COPYRIGHT... 3 SUPPORT TECHNIQUE ET MISES A JOUR...
Clé Flash USB2.0 Acer
 Clé Flash USB2.0 Acer Manuel Utilisateur Ver 2.0 Droits d'auteur Copyright 2005 par Acer Inc., Tous droits réservés. Aucune partie de cette publication ne peut être reproduite, transmise, transcrite, enregistrée
Clé Flash USB2.0 Acer Manuel Utilisateur Ver 2.0 Droits d'auteur Copyright 2005 par Acer Inc., Tous droits réservés. Aucune partie de cette publication ne peut être reproduite, transmise, transcrite, enregistrée
3615 SELFIE. http://graffitiresearchlab.fr HOW-TO / GUIDE D'UTILISATION
 3615 SELFIE http://graffitiresearchlab.fr HOW-TO / GUIDE D'UTILISATION Hardware : Minitel Computer DIN FM545 45 connector (http://www.gotronic.fr/art-fiche-din-fm545-4747.htm) Cable Arduino compatible
3615 SELFIE http://graffitiresearchlab.fr HOW-TO / GUIDE D'UTILISATION Hardware : Minitel Computer DIN FM545 45 connector (http://www.gotronic.fr/art-fiche-din-fm545-4747.htm) Cable Arduino compatible
Généralités sur le Langage Java et éléments syntaxiques.
 Généralités sur le Langage Java et éléments syntaxiques. Généralités sur le Langage Java et éléments syntaxiques....1 Introduction...1 Genéralité sur le langage Java....1 Syntaxe de base du Langage...
Généralités sur le Langage Java et éléments syntaxiques. Généralités sur le Langage Java et éléments syntaxiques....1 Introduction...1 Genéralité sur le langage Java....1 Syntaxe de base du Langage...
Supervision et infrastructure - Accès aux applications JAVA. Document FAQ. Page: 1 / 9 Dernière mise à jour: 15/04/12 16:14
 Document FAQ Supervision et infrastructure - Accès aux EXP Page: 1 / 9 Table des matières Introduction... 3 Démarrage de la console JMX...4 I.Généralités... 4 II.WebLogic... 5 III.WebSphere... 6 IV.JBoss...
Document FAQ Supervision et infrastructure - Accès aux EXP Page: 1 / 9 Table des matières Introduction... 3 Démarrage de la console JMX...4 I.Généralités... 4 II.WebLogic... 5 III.WebSphere... 6 IV.JBoss...
Mise en service HORUS version HTTP
 HTTP 1 / 8 Mise en service HORUS version HTTP Date Indice Nature des modifications Rédaction Nom/visa 03/05/06 A Première rédaction XI Vérification Nom/visa Approbation Nom/visa HTTP 2 / 8 SOMMAIRE 1)
HTTP 1 / 8 Mise en service HORUS version HTTP Date Indice Nature des modifications Rédaction Nom/visa 03/05/06 A Première rédaction XI Vérification Nom/visa Approbation Nom/visa HTTP 2 / 8 SOMMAIRE 1)
Quick Installation Guide TEW-P21G
 Quick Installation Guide TEW-P21G Table of of Contents Contents... 1. Avant de commencer... 2. Comment effectuer les connexions... 3. Utilisation du serveur d'impression... 1 1 2 3 Troubleshooting... 7
Quick Installation Guide TEW-P21G Table of of Contents Contents... 1. Avant de commencer... 2. Comment effectuer les connexions... 3. Utilisation du serveur d'impression... 1 1 2 3 Troubleshooting... 7
CRÉER UN DVD VIDEO avec DVD FLICK (avec ou sans menu)
") CRÉER UN DVD VIDEO avec DVD FLICK (avec ou sans menu) DVD Flick permet de convertir des vidéos de différents formats en DVD Vidéo (lisible sur un lecteur DVD de salon). Il supporte plus de 45 formats différents
CRÉER UN DVD VIDEO avec DVD FLICK (avec ou sans menu) DVD Flick permet de convertir des vidéos de différents formats en DVD Vidéo (lisible sur un lecteur DVD de salon). Il supporte plus de 45 formats différents
Cours 7 : Programmation d une chaîne d acquisition
 Cours 7 : Programmation d une chaîne d acquisition 4 Concepts 4 Programmation Cible Pentium : Langages de haut niveau Langage graphique G sous LabView + librairies de VI ; Langage C + librairies de fonctions
Cours 7 : Programmation d une chaîne d acquisition 4 Concepts 4 Programmation Cible Pentium : Langages de haut niveau Langage graphique G sous LabView + librairies de VI ; Langage C + librairies de fonctions
VTP. LAN Switching and Wireless Chapitre 4
 VTP LAN Switching and Wireless Chapitre 4 ITE I Chapter 6 2006 Cisco Systems, Inc. All rights reserved. Cisco Public 1 Pourquoi VTP? Le défi de la gestion VLAN La complexité de gestion des VLANs et des
VTP LAN Switching and Wireless Chapitre 4 ITE I Chapter 6 2006 Cisco Systems, Inc. All rights reserved. Cisco Public 1 Pourquoi VTP? Le défi de la gestion VLAN La complexité de gestion des VLANs et des
http://manageengine.adventnet.com/products/opmanager/download.html?free
 Introduction Opmanager est un outil de supervision des équipements réseau. Il supporte SNMP, WMI et des scripts ssh ou Telnet pour récupérer des informations sur les machines. Toutefois les machines doivent
Introduction Opmanager est un outil de supervision des équipements réseau. Il supporte SNMP, WMI et des scripts ssh ou Telnet pour récupérer des informations sur les machines. Toutefois les machines doivent
Project 1 Experimenting with Simple Network Management Tools. ping, traceout, and Wireshark (formerly Ethereal)
") Project 1 Experimenting with Simple Network Management Tools ping, traceout, and Wireshark (formerly Ethereal) (A) (25%) Use the ping utility to determine reach-ability of several computers. To run a ping
Project 1 Experimenting with Simple Network Management Tools ping, traceout, and Wireshark (formerly Ethereal) (A) (25%) Use the ping utility to determine reach-ability of several computers. To run a ping
Academic Project. B2- Web Development. Resit Project. Version 1.0 Last update: 24/05/2013 Use: Students Author: Samuel CUELLA
 SUPINFO Academic Dept. Resit Project Academic Project B2- Web Development 2012-2013 Version 1.0 Last update: 24/05/2013 Use: Students Author: Samuel CUELLA Conditions d utilisations : SUPINFO International
SUPINFO Academic Dept. Resit Project Academic Project B2- Web Development 2012-2013 Version 1.0 Last update: 24/05/2013 Use: Students Author: Samuel CUELLA Conditions d utilisations : SUPINFO International
The new consumables catalogue from Medisoft is now updated. Please discover this full overview of all our consumables available to you.
 General information 120426_CCD_EN_FR Dear Partner, The new consumables catalogue from Medisoft is now updated. Please discover this full overview of all our consumables available to you. To assist navigation
General information 120426_CCD_EN_FR Dear Partner, The new consumables catalogue from Medisoft is now updated. Please discover this full overview of all our consumables available to you. To assist navigation
Réalisation d un réseau de capteurs de température sans fil basé sur le protocole ZigBee
 Cedric BEAUSSE Mohamed BOUGUERRA Hong Yu GUAN El Ayachi MOKTAD Projet avancé en systèmes embarqués 2006 / 2007 Réalisation d un réseau de capteurs de température sans fil basé sur le protocole ZigBee Sommaire
Cedric BEAUSSE Mohamed BOUGUERRA Hong Yu GUAN El Ayachi MOKTAD Projet avancé en systèmes embarqués 2006 / 2007 Réalisation d un réseau de capteurs de température sans fil basé sur le protocole ZigBee Sommaire
Système M-Bus NIEVEAU TERRAIN NIVEAU AUTOMATION NIVEAU GESTION. Domaines d'application
 5 657 ENERGY MONITORING ET CONTROLLING EMC MeterProxy pour M-Bus CSM30.001 L'Energy Monitoring & Controlling EMC est un outil de gestion d'énergie d'utilisation aisée pour la surveillance et le contrôle
5 657 ENERGY MONITORING ET CONTROLLING EMC MeterProxy pour M-Bus CSM30.001 L'Energy Monitoring & Controlling EMC est un outil de gestion d'énergie d'utilisation aisée pour la surveillance et le contrôle
Practice Direction. Class Proceedings
 Effective Date: 2010/07/01 Number: PD - 5 Title: Practice Direction Class Proceedings Summary: This Practice Direction describes the procedure for requesting the assignment of a judge in a proceeding under
Effective Date: 2010/07/01 Number: PD - 5 Title: Practice Direction Class Proceedings Summary: This Practice Direction describes the procedure for requesting the assignment of a judge in a proceeding under
Phone Manager Soutien de l'application OCTOBER 2014 DOCUMENT RELEASE 4.1 SOUTIEN DE L'APPLICATION
 Phone Manager Soutien de l'application OCTOBER 2014 DOCUMENT RELEASE 4.1 SOUTIEN DE L'APPLICATION Salesforce NOTICE The information contained in this document is believed to be accurate in all respects
Phone Manager Soutien de l'application OCTOBER 2014 DOCUMENT RELEASE 4.1 SOUTIEN DE L'APPLICATION Salesforce NOTICE The information contained in this document is believed to be accurate in all respects
Logitech Tablet Keyboard for Windows 8, Windows RT and Android 3.0+ Setup Guide Guide d installation
 Logitech Tablet Keyboard for Windows 8, Windows RT and Android 3.0+ Setup Guide Guide d installation English.......................................... 3 Français.........................................
Logitech Tablet Keyboard for Windows 8, Windows RT and Android 3.0+ Setup Guide Guide d installation English.......................................... 3 Français.........................................
Optimisations des SGBDR. Étude de cas : MySQL
 Optimisations des SGBDR Étude de cas : MySQL Introduction Pourquoi optimiser son application? Introduction Pourquoi optimiser son application? 1. Gestion de gros volumes de données 2. Application critique
Optimisations des SGBDR Étude de cas : MySQL Introduction Pourquoi optimiser son application? Introduction Pourquoi optimiser son application? 1. Gestion de gros volumes de données 2. Application critique
Le langage C. Séance n 4
 Université Paris-Sud 11 Institut de Formation des Ingénieurs Remise à niveau INFORMATIQUE Année 2007-2008 Travaux pratiques d informatique Le langage C Séance n 4 But : Vous devez maîtriser à la fin de
Université Paris-Sud 11 Institut de Formation des Ingénieurs Remise à niveau INFORMATIQUE Année 2007-2008 Travaux pratiques d informatique Le langage C Séance n 4 But : Vous devez maîtriser à la fin de
REPUBLIQUE TUNISIENNE MINISTERE DE L ENSEIGNEMENT SUPERIEUR, DE LA RECHERCHE SCIENTIFIQUE ET DE LA TECHNOLOGIE UNIVERSITE DE TUNIS EL MANAR ISI
 REPUBLIQUE TUNISIENNE MINISTERE DE L ENSEIGNEMENT SUPERIEUR, DE LA RECHERCHE SCIENTIFIQUE ET DE LA TECHNOLOGIE UNIVERSITE DE TUNIS EL MANAR I N S T I T U T S U P E R I E U R ISI INFORMATIQUE المعهد العالي
REPUBLIQUE TUNISIENNE MINISTERE DE L ENSEIGNEMENT SUPERIEUR, DE LA RECHERCHE SCIENTIFIQUE ET DE LA TECHNOLOGIE UNIVERSITE DE TUNIS EL MANAR I N S T I T U T S U P E R I E U R ISI INFORMATIQUE المعهد العالي
Plan du cours. Historique du langage http://www.oracle.com/technetwork/java/index.html. Nouveautés de Java 7
 Université Lumière Lyon 2 Faculté de Sciences Economiques et Gestion KHARKIV National University of Economic Introduction au Langage Java Master Informatique 1 ère année Julien Velcin http://mediamining.univ-lyon2.fr/velcin
Université Lumière Lyon 2 Faculté de Sciences Economiques et Gestion KHARKIV National University of Economic Introduction au Langage Java Master Informatique 1 ère année Julien Velcin http://mediamining.univ-lyon2.fr/velcin
NTP (Network Time Protocol)
") NTP (Network Time Protocol) Nous utilisons l'environnement du Lab Guide de Novell, pour nous familiariser avec SLES-10, roulant sous un serveur VMware Server 1.0.6. A: sles101-nsm (SLES10.1/OES2.0) B:
NTP (Network Time Protocol) Nous utilisons l'environnement du Lab Guide de Novell, pour nous familiariser avec SLES-10, roulant sous un serveur VMware Server 1.0.6. A: sles101-nsm (SLES10.1/OES2.0) B:
Windows Front-End Installation Guide HOPEX V1R1 FR
 Révisé le : 5 novembre 2013 Créé le : 31 octobre 2013 Auteur : Jérôme Horber SOMMAIRE Résumé Ce document décrit les procédures et les paramétrages techniques nécessaires à l'installation, à la mise à jour
Révisé le : 5 novembre 2013 Créé le : 31 octobre 2013 Auteur : Jérôme Horber SOMMAIRE Résumé Ce document décrit les procédures et les paramétrages techniques nécessaires à l'installation, à la mise à jour
Guide de démarrage du système modulaire Sun Blade 6000
 Guide de démarrage du système modulaire Sun Blade 6000 Ce document contient des informations de base sur la configuration du système modulaire Sun Blade 6000. Vous trouverez des informations détaillées
Guide de démarrage du système modulaire Sun Blade 6000 Ce document contient des informations de base sur la configuration du système modulaire Sun Blade 6000. Vous trouverez des informations détaillées
Manipulations du laboratoire
 Manipulations du laboratoire 1 Matériel Les manipulations de ce laboratoire sont réalisées sur une carte électronique comprenant un compteur 4-bit asynchrone (74LS93) avec possibilité de déclenchement
Manipulations du laboratoire 1 Matériel Les manipulations de ce laboratoire sont réalisées sur une carte électronique comprenant un compteur 4-bit asynchrone (74LS93) avec possibilité de déclenchement
Éléments d'architecture des ordinateurs
 Chapitre 1 Éléments d'architecture des ordinateurs Machines take me by surprise with great frequency. Alan Turing 1.1 Le Hardware Avant d'attaquer la programmation, il est bon d'avoir quelques connaissances
Chapitre 1 Éléments d'architecture des ordinateurs Machines take me by surprise with great frequency. Alan Turing 1.1 Le Hardware Avant d'attaquer la programmation, il est bon d'avoir quelques connaissances
LOGICIEL ALARM MONITORING
 LOGICIEL ALARM MONITORING Superviseur des centrales Galaxy - 1 - APPLICATIONS 4 Application locale sur le site 4 Application à distance 4 RACCORDEMENTS 4 CARACTERISTIQUES MATERIELLES 5 Centrale Galaxy
LOGICIEL ALARM MONITORING Superviseur des centrales Galaxy - 1 - APPLICATIONS 4 Application locale sur le site 4 Application à distance 4 RACCORDEMENTS 4 CARACTERISTIQUES MATERIELLES 5 Centrale Galaxy
Base de l'informatique. Généralité et Architecture Le système d'exploitation Les logiciels Le réseau et l'extérieur (WEB)
") Base de l'informatique Généralité et Architecture Le système d'exploitation Les logiciels Le réseau et l'extérieur (WEB) Généralité Comment fonctionne un ordinateur? Nous définirons 3 couches Le matériel
Base de l'informatique Généralité et Architecture Le système d'exploitation Les logiciels Le réseau et l'extérieur (WEB) Généralité Comment fonctionne un ordinateur? Nous définirons 3 couches Le matériel
OPTENET DCAgent 2.01. Manuel d'utilisateur
 OPTENET DCAgent 2.01 Manuel d'utilisateur SOMMAIRE 1. INTRODUCTION...1 2. INSTALLATION...2 3. ÉTABLISSEMENT DES PERMISSIONS...4 Pour de plus amples informations, reportez-vous aux annexes «Conditions requises
OPTENET DCAgent 2.01 Manuel d'utilisateur SOMMAIRE 1. INTRODUCTION...1 2. INSTALLATION...2 3. ÉTABLISSEMENT DES PERMISSIONS...4 Pour de plus amples informations, reportez-vous aux annexes «Conditions requises
CARTE INTERFACE PCI PARALLÈLE
 CARTE INTERFACE PCI PARALLÈLE Introduction Guide d'installation rapide Nous vous remercions d'avoir acheté cette carte interface PCI IEEE1284. Elle vous permet d'ajouter jusqu'à deux ports de communication
CARTE INTERFACE PCI PARALLÈLE Introduction Guide d'installation rapide Nous vous remercions d'avoir acheté cette carte interface PCI IEEE1284. Elle vous permet d'ajouter jusqu'à deux ports de communication
Conventions d écriture et outils de mise au point
 Logiciel de base Première année par alternance Responsable : Christophe Rippert [email protected] Introduction Conventions d écriture et outils de mise au point On va utiliser dans cette
Logiciel de base Première année par alternance Responsable : Christophe Rippert [email protected] Introduction Conventions d écriture et outils de mise au point On va utiliser dans cette