Apport d un modèle virtuel 3D pour la navigation autonome en milieu urbain
|
|
|
- Léon Gravel
- il y a 6 ans
- Total affichages :
Transcription

1 Apport d un modèle virtuel 3D pour la navigation autonome en milieu urbain Cindy Cappelle Maan El Badaoui El Najjar Laboratoire d'automatique, Génie Informatique et Signal Equipe «SFSD» 22 Janvier 2008 Journée "Robotique et SIG" 1
2 Plan SIG-3D Détection d obstacle Géo-localisation Simulateur virtuel Perspectives 22 Janvier 2008 Journée "Robotique et SIG" 2
3 Plan SIG-3D Détection d obstacle Géo-localisation Simulateur virtuel Perspectives 22 Janvier 2008 Journée "Robotique et SIG" 3
4 SIG-3D Modèle 3D géographique de la Place Stanislas ànancy Tecnomade Précision métrique Démonstration SIG-3D Gère le modèle 3D en temps-réel 22 Janvier 2008 Journée "Robotique et SIG" 4

5 SIG-3D Image virtuelle X Y Z Modèle 3D FOV Géoréférencement SIG-3D φ θ ψ 22 Janvier 2008 Journée "Robotique et SIG" 5

6 SIG-3D Image de profondeur X Y Z Modèle 3D FOV Géoréférencement SIG-3D φ θ ψ 22 Janvier 2008 Journée "Robotique et SIG" 6
7 SIG-3D Fichier Profondeur Modèle 3D FOV Géoréférencement X Y Z SIG-3D φ θ ψ e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e e Janvier 2008 Journée "Robotique et SIG" 7

8 SIG-3D Image des segments 3D virtuels visibles X Y Z Modèle 3D FOV Géoréférencement SIG-3D φ θ ψ 22 Janvier 2008 Journée "Robotique et SIG" 8
9 SIG-3D Segments 3D de la base Modèle 3D FOV Géoréférencement X Y Z SIG-3D φ θ ψ <Segment> <Visible status="hors champ"/> <Point numero="1"> <Coordonnees x=" " y=" " z=" "/> </Point> <Point numero="2"> <Coordonnees x=" " y=" " z=" "/> </Point> </Segment> <Segment> 22 Janvier 2008 Journée "Robotique et SIG" 9

10 SIG-3D Démonstration 22 Janvier 2008 Journée "Robotique et SIG" 10
11 Plan SIG-3D Détection d obstacled Géo-localisation Simulateur virtuel Perspectives 22 Janvier 2008 Journée "Robotique et SIG" 11

12 Détection d obstacle Camera Modèle 3D GPS SIG-3D Module de traitement d images pour la détection, le suivi et la géo-localisation des obstacles Distance entre le véhicule et l obstacle Géo-position de l obstacle détecté 22 Janvier 2008 Journée "Robotique et SIG" 12
13 Détection d obstacle Méthode basée sur la comparaison entre 2 images Image réelle Caméra embarquée Contient les éventuels obstacles Image virtuelle Fournie par le SIG-3D qui gère le modèle 3D «Background» de la scène 22 Janvier 2008 Journée "Robotique et SIG" 13

14 Détection d obstacle REAL IMAGE VIRTUAL IMAGE IMAGES SUBSTRACTION 22 Janvier 2008 Journée "Robotique et SIG" 14

15 Détection d obstacle Utilisation de l information de profondeur du SIG-3D pour calculer la distance entre le véhicule et l obstacle détecté SIG-3D fournit la distance entre la caméra virtuelle dans le modèle 3D et le point 3D représenté par chaque pixel de l image virtuelle. 22 Janvier 2008 Journée "Robotique et SIG" 15
 5 4,5 4 3,5 3 2,5 2 1,5 1 0,5 0 Vision/3D model Laser scanner 1 4")
 0-0,2-0,4-0,6-0,8-1 Time (sec) 22 Janvier 2008 Journée \"Robotique et")
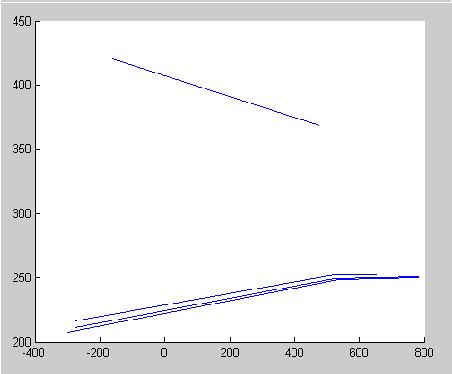
16 Détection d obstacle Distance between vehicle and obstacle Validation de la distance avec un télémètre laser Distance (m) 5 4,5 4 3,5 3 2,5 2 1,5 1 0,5 0 Vision/3D model Laser scanner Time (sec) Distance error ,6 0,4 0,2 Error (m) 0-0,2-0,4-0,6-0,8-1 Time (sec) 22 Janvier 2008 Journée "Robotique et SIG" 16

17 Détection d obstacle Résultats 22 Janvier 2008 Journée "Robotique et SIG" 17
18 Plan SIG-3D Détection d obstacle Géo-localisation Simulateur virtuel Perspectives 22 Janvier 2008 Journée "Robotique et SIG" 18



19 Géo-localisation Recalage de l image réelle acquise par rapport au modèle 3D Appariement 2D/2D Coefficient de corrélation Avant appariement Appariement Après appariement 22 Janvier 2008 Journée "Robotique et SIG" 19
20 Géo-localisation Recalage de l image réelle acquise par rapport au modèle 3D Appariement 2D/3D Appariement des segments 2D réels avec les segments 3D virtuels par une recherche arborescente 22 Janvier 2008 Journée "Robotique et SIG" 20








21 Géo-localisation Calibration de la caméra Extraction des segments 2D Appariement de des segments réels 2D Extraction l image des segments réelle acquise Calcul de la position et de 3D du modèle avec les segments virtuels 3D visibles à partir de la pose estimée à l aide l orientation des arbres de d interprétation la caméra 22 Janvier 2008 Journée "Robotique et SIG" 21
22 Géo-localisation Contrainte unaire n ( Rv ) = 0 i i n ( R. p + T) = 0 i i a cosϕ + b sinϕ + c = 0 ij ij ij Ax+ By+ C = 0 ij ij ij 22 Janvier 2008 Journée "Robotique et SIG" 22
23 Géo-localisation Contrainte unaire C a cosϕ + b sinϕ + c = 0 ij ij ij Ax+ By+ C = ij ij ij 0 D L appariement L i -l j est cohérent si ϕ ϕ <Δϕ e D< Δt 22 Janvier 2008 Journée "Robotique et SIG" 23
24 Géo-localisation Contrainte binaire Pour les paires de segments verticaux La position de la caméra est contrainte à appartenir à un arc de cercle C. Le couple d appariements (L i -l k, L j -l l ) est cohérent si le cercle C a une partie commune avec le cercle d incertitude C C C C' 0 22 Janvier 2008 Journée "Robotique et SIG" 24


25 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 25
26 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 26
27 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 27
28 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 28
29 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 29

30 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 30
31 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 31
32 Géo-localisation Résultats préliminaires 22 Janvier 2008 Journée "Robotique et SIG" 32
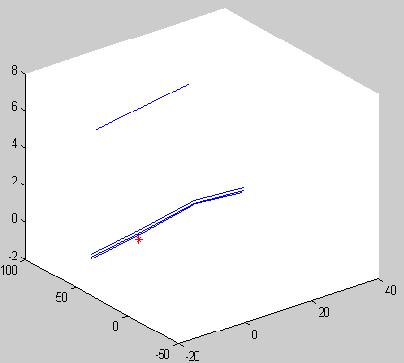
33 Géo-localisation Résultats préliminaires Vraie position x = m y = m z = 2 m Position estimée xe = m ye = m ze = m 22 Janvier 2008 Journée "Robotique et SIG" 33
34 Plan SIG-3D Détection d obstacle Géo-localisation Simulateur virtuel Simulateur virtuel Perspectives 22 Janvier 2008 Journée "Robotique et SIG" 34
 22 Janvier 2008 Journée \"Robotique et SIG\" 35")
35 Simulateur virtuel Plateforme d acquisition intégrée au CyCab (GPS, Télémètre laser, Codeurs incrémentaux, Gyromètre, Centrale Inertielle ) 22 Janvier 2008 Journée "Robotique et SIG" 35
36 Simulateur virtuel Passage du moteur 3D Tecnomade à OSG Plus ouvert à l ajout d autres fonctionnalités OSG : langage de programmation orienté objet Mono-véhicule Multi-véhicule Mono prise de vue Multi prises de vue Intégration de modèles cinématique ou dynamique 22 Janvier 2008 Journée "Robotique et SIG" 36
37 Simulateur virtuel Rejouer des données réelles Vidéo1 Vidéo2 Simulateur de contrôle d un convoi de véhicules «Platooning» Vidéo1 Vidéo2 22 Janvier 2008 Journée "Robotique et SIG" 37
38 Plan SIG-3D Détection d obstacle Géo-localisation Simulateur virtuel Perspectives 22 Janvier 2008 Journée "Robotique et SIG" 38
39 Perspectives Un démonstrateur temps-réel du détecteur d obstacle est en cours de développement Fusion de données multi-hypothèses à l aide des réseaux bayésiens dynamiques Localisation : appariement modèle 3D / télémètre laser Intégration des fonctions et attributs d un SIG- 2D standard au SIG-3D utilisé 22 Janvier 2008 Journée "Robotique et SIG" 39
40 Publications C. Cappelle, M. El Badaoui El Najjar, F. Charpillet, D. Pomorski, "Obstacles detection and localisation with 3D geographical model and monovision", IEEE Intelligent Transportation Systems Conference, ITSC'07, pages , Seattle, Washington, USA, 30 Sept - 3 Oct, 2007 C. Cappelle, M. El Badaoui El Najjar, D. Pomorski, F. Charpillet, "Localisation in urban environment using GPS and INS aided by monocular vision system and 3D geographical model", IEEE Intelligent Vehicles Symposium, IV'07, pages , Istanbul, Turquie, Juin, 2007 M. Dawoud, M. Khalil, M. El Badaoui El Najjar, B. El Hassan, H. Ziadeh. Tracking System using GPS, vision and 3D virtual Model, IEEE International Conference on Information & Communication Technologies from Theory to Applications, ICTTA 08, Damascus, Syrie, 7-11 Avril, Janvier 2008 Journée "Robotique et SIG" 40
41 Apport d un modèle virtuel 3D pour la navigation autonome en milieu urbain Cindy Cappelle Maan El Badaoui El Najjar Laboratoire d'automatique, Génie Informatique et Signal Equipe «SFSD» 22 Janvier 2008 Journée "Robotique et SIG" 41
Cartographie Mobile à MINES ParisTech
 Cartographie Mobile à MINES ParisTech Entre robotique, géomatique et nouveaux usages Pr. François Goulette Plan 4 septembre 2013 2 Automatisation de maintenance en environnements industriels (1993) Automatisation
Cartographie Mobile à MINES ParisTech Entre robotique, géomatique et nouveaux usages Pr. François Goulette Plan 4 septembre 2013 2 Automatisation de maintenance en environnements industriels (1993) Automatisation
LIDAR LAUSANNE 2012. Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés
 LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
LIDAR LAUSANNE 2012 Nouvelles données altimétriques sur l agglomération lausannoise par technologie laser aéroporté et ses produits dérivés LIDAR 2012, nouveaux modèles altimétriques 1 Affaire 94022 /
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur
 Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Réalité virtuelle au service de la maintenance
 Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Journées PERF-RV 14-15 Octobre 2004. B. Arnaldi http://www.perfrv.org
 1 Journées PERF-RV 14-15 Octobre 2004 B. Arnaldi http://www.perfrv.org Objectifs de PERF-RV Plate-forme exploratoire Début des travaux : février 2001 Fin des travaux : août 2004 La réalité virtuelle, contexte
1 Journées PERF-RV 14-15 Octobre 2004 B. Arnaldi http://www.perfrv.org Objectifs de PERF-RV Plate-forme exploratoire Début des travaux : février 2001 Fin des travaux : août 2004 La réalité virtuelle, contexte
intelligence artificielle et cognitique"
 Dialogue on Education, 11h-11h10 Course overview on "Automatisation avancée, intelligence artificielle et cognitique" Prof. Dr. Jean-Daniel Dessimoz, MBA, HES-SO / HEIG-VD 11:00-11:10, 18 November 2014
Dialogue on Education, 11h-11h10 Course overview on "Automatisation avancée, intelligence artificielle et cognitique" Prof. Dr. Jean-Daniel Dessimoz, MBA, HES-SO / HEIG-VD 11:00-11:10, 18 November 2014
Station Totale Geomax Série Zoom30
 Station Totale Geomax Série Zoom30 GeoMax Profil de l entreprise GeoMax est une entreprise fort de solides positions sur L étroite collaboration qui présente à l international et le marché des technologies
Station Totale Geomax Série Zoom30 GeoMax Profil de l entreprise GeoMax est une entreprise fort de solides positions sur L étroite collaboration qui présente à l international et le marché des technologies
Résolution d équations non linéaires
 Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
Analyse Numérique Résolution d équations non linéaires Said EL HAJJI et Touria GHEMIRES Université Mohammed V - Agdal. Faculté des Sciences Département de Mathématiques. Laboratoire de Mathématiques, Informatique
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS
 GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
CHAPITRE IV Oscillations libres des systèmes à plusieurs degrés de liberté
 CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer!
 JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
Immersion - Vision 3D dans la RV.
 Cours RVS Master II IVA Immersion - Vision 3D dans la RV. Cours de Réalité Virtuelle et Simulation Master II - IVA A. Mebarki - Maître de Conférences Département d'informatique Faculté des Mathématiques
Cours RVS Master II IVA Immersion - Vision 3D dans la RV. Cours de Réalité Virtuelle et Simulation Master II - IVA A. Mebarki - Maître de Conférences Département d'informatique Faculté des Mathématiques
L utilisation du lidar terrestre en foresterie. Richard Fournier Département de géomatique appliquée
 L utilisation du lidar terrestre en foresterie Richard Fournier Département de géomatique appliquée Problématique Inventaire traditionnel : photographie aérienne imagerie satellitaire relevés manuels sur
L utilisation du lidar terrestre en foresterie Richard Fournier Département de géomatique appliquée Problématique Inventaire traditionnel : photographie aérienne imagerie satellitaire relevés manuels sur
N. Paparoditis, Laboratoire MATIS
 N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
N. Paparoditis, Laboratoire MATIS Contexte: Diffusion de données et services locaux STEREOPOLIS II Un véhicule de numérisation mobile terrestre Lasers Caméras Système de navigation/positionnement STEREOPOLIS
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
RIF@PARIS-SACLAY. Pascale Betinelli CEA LIST. Demi-journée d'information ECHORD++ 20 avril 2015 - M.E.N.E.S.R
 European Clearing House for Open Robotics Development Plus Plus RIF@PARIS-SACLAY Pascale Betinelli CEA LIST Demi-journée d'information ECHORD++ 20 avril 2015 - M.E.N.E.S.R 1 Experiments Robotics Innovation
European Clearing House for Open Robotics Development Plus Plus RIF@PARIS-SACLAY Pascale Betinelli CEA LIST Demi-journée d'information ECHORD++ 20 avril 2015 - M.E.N.E.S.R 1 Experiments Robotics Innovation
Claire NOEL Directeur Scientifique
 Bureau d é études en océanographie acoustique SEMANTIC TS Sanary (Var) Claire NOEL Directeur Scientifique Docteur Ingénieur Opérateur sonar Capitaine 200 Plongeur PRO - Modélisation - Traitement du signal
Bureau d é études en océanographie acoustique SEMANTIC TS Sanary (Var) Claire NOEL Directeur Scientifique Docteur Ingénieur Opérateur sonar Capitaine 200 Plongeur PRO - Modélisation - Traitement du signal
CONTRAINTES TECHNIQUES
 CONTRAINTES TECHNIQUES traffic_web@canal-plus.com Dernière mise à jour : 06 07 2012 DISPLAY INFORMATIONS GENERALES 1. LE SON : En «OFF» par défaut Se Déclenche au roll over ou au clic. Intégrer un bouton
CONTRAINTES TECHNIQUES traffic_web@canal-plus.com Dernière mise à jour : 06 07 2012 DISPLAY INFORMATIONS GENERALES 1. LE SON : En «OFF» par défaut Se Déclenche au roll over ou au clic. Intégrer un bouton
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données. Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège
 Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Les apports de l informatique. Aux autres disciplines
 Les apports de l informatique Aux autres disciplines Le statut de technologie ou de sous-discipline est celui de l importation l et de la vulgarisation Le statut de science à part entière est lorsqu il
Les apports de l informatique Aux autres disciplines Le statut de technologie ou de sous-discipline est celui de l importation l et de la vulgarisation Le statut de science à part entière est lorsqu il
Journée SITG, Genève 15 octobre 2013. Nicolas Lachance-Bernard M.ATDR Doctorant, Laboratoire de systèmes d information géographique
 Monitorint spatio-temporel intégré de la mobilité urbaine Monitoring spatio-temporel de l ADN urbain Une réponse aux défis, problèmes, enjeux et risques des milieux urbains Nicolas Lachance-Bernard M.ATDR
Monitorint spatio-temporel intégré de la mobilité urbaine Monitoring spatio-temporel de l ADN urbain Une réponse aux défis, problèmes, enjeux et risques des milieux urbains Nicolas Lachance-Bernard M.ATDR
Introduction à la robotique Licence 1ère année - 2011/2012
 Introduction à la robotique Licence 1ère année - 2011/2012 Laëtitia Matignon GREYC-CNRS Université de Caen, France Laetitia Matignon Université de Caen 1 / 61 Plan Définitions 1 Définitions 2 3 Robots
Introduction à la robotique Licence 1ère année - 2011/2012 Laëtitia Matignon GREYC-CNRS Université de Caen, France Laetitia Matignon Université de Caen 1 / 61 Plan Définitions 1 Définitions 2 3 Robots
Société de Geo-engineering
 Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Le drone de cartographie professionnelle
 Le drone de cartographie professionnelle 4 raisons de choisir l'ebee 01. Réalisez plus de cartes, d'une plus grande précision L'eBee peut couvrir jusqu'à 12 km² au cours d'un seul vol. Quand il survole
Le drone de cartographie professionnelle 4 raisons de choisir l'ebee 01. Réalisez plus de cartes, d'une plus grande précision L'eBee peut couvrir jusqu'à 12 km² au cours d'un seul vol. Quand il survole
Teaching Sustainable Development in Paris 1 Master Environment and Sustainable Development
 Teaching Sustainable Development in Paris 1 Master Environment and Sustainable Development - federal - pluridisciplinary - focused on human and social sciences Federal Master Environment and Sustainable
Teaching Sustainable Development in Paris 1 Master Environment and Sustainable Development - federal - pluridisciplinary - focused on human and social sciences Federal Master Environment and Sustainable
Christophe SANNIER christophe.sannier@sirs-fr.com
 Systèmes d Information à Référence Spatiale Utilisation d un Estimateur de Régression avec des Données Landsat pour l Estimation de l Etendu et des Changements du Couvert Forestier du Gabon de 1990 à 2010
Systèmes d Information à Référence Spatiale Utilisation d un Estimateur de Régression avec des Données Landsat pour l Estimation de l Etendu et des Changements du Couvert Forestier du Gabon de 1990 à 2010
GNS 3 Travaux pratiques
 GNS 3 Travaux pratiques Sommaire Spécifications du laboratoire... 3 Configuration des hôtes virtuels... 3 Préparation des PC (Clouds) dans GNS3... 8 Préparation et configuration des routeurs... 9 Activation
GNS 3 Travaux pratiques Sommaire Spécifications du laboratoire... 3 Configuration des hôtes virtuels... 3 Préparation des PC (Clouds) dans GNS3... 8 Préparation et configuration des routeurs... 9 Activation
SARM: Simulation of Absorption Refrigeration Machine
 Revue des Energies Renouvelables Vol. 11 N 4 (2008) 587 594 SARM: Simulation of Absorption Refrigeration Machine S. Kherris 1*, M. Makhlouf 1 et A. Asnoun 2 1 Laboratoire des Matériaux et des Systèmes
Revue des Energies Renouvelables Vol. 11 N 4 (2008) 587 594 SARM: Simulation of Absorption Refrigeration Machine S. Kherris 1*, M. Makhlouf 1 et A. Asnoun 2 1 Laboratoire des Matériaux et des Systèmes
DE LA NUMÉRISATION DES ACTIONS PHYSIQUES DES UTILISATEURS VERS LA CONCEPTION D INTERFACE AVEC LA KINECT
 DE LA NUMÉRISATION DES ACTIONS PHYSIQUES DES UTILISATEURS VERS LA CONCEPTION D INTERFACE AVEC LA KINECT Doctorant Laboratoire G-SCOP VEYTIZOU Julien Julien.Veytizou@grenoble-inp.fr Qui suis-je? Projet
DE LA NUMÉRISATION DES ACTIONS PHYSIQUES DES UTILISATEURS VERS LA CONCEPTION D INTERFACE AVEC LA KINECT Doctorant Laboratoire G-SCOP VEYTIZOU Julien Julien.Veytizou@grenoble-inp.fr Qui suis-je? Projet
ABB i-bus KNX Les nouveaux Room Master RM/S 3.1 et RM/S 4.1
 Intelligent Building Control ABB i-bus KNX Les nouveaux Room Master RM/S 3.1 et RM/S 4.1 Page 1 ABB i-bus KNX Les nouveaux Room Master RM/S3.1 et RM/S4.1 La connexion entre Une installation électrique
Intelligent Building Control ABB i-bus KNX Les nouveaux Room Master RM/S 3.1 et RM/S 4.1 Page 1 ABB i-bus KNX Les nouveaux Room Master RM/S3.1 et RM/S4.1 La connexion entre Une installation électrique
IFT3902 : (Gestion de projet pour le) développement, (et la) maintenance des logiciels
 développement, (et la) maintenance des logiciels") IFT3902 : (Gestion de projet pour le) développement, (et la) maintenance des logiciels Yann-Gaël Guéhéneuc Professeur adjoint guehene@iro.umontreal.ca, local 2345 Département d informatique et de recherche
IFT3902 : (Gestion de projet pour le) développement, (et la) maintenance des logiciels Yann-Gaël Guéhéneuc Professeur adjoint guehene@iro.umontreal.ca, local 2345 Département d informatique et de recherche
Manipulateurs Pleinement Parallèles
 Séparation des Solutions aux Modèles Géométriques Direct et Inverse pour les Manipulateurs Pleinement Parallèles Chablat Damien, Wenger Philippe Institut de Recherche en Communications et Cybernétique
Séparation des Solutions aux Modèles Géométriques Direct et Inverse pour les Manipulateurs Pleinement Parallèles Chablat Damien, Wenger Philippe Institut de Recherche en Communications et Cybernétique
Webinaire - Solution Rubix
 Webinaire - Solution Rubix Evaluation de la performance des réseaux routiers municipaux Une approche novatrice à faible coût Webinaire - Agenda Introduction de Trifide et Rival Solutions Introduction à
Webinaire - Solution Rubix Evaluation de la performance des réseaux routiers municipaux Une approche novatrice à faible coût Webinaire - Agenda Introduction de Trifide et Rival Solutions Introduction à
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
ENOVIA 3DLive. IBM PLM Solutions 1 er Octobre 2007. Philippe Georgelin Sébastien Veret
 ENOVIA 3DLive IBM PLM Solutions 1 er Octobre 2007 Philippe Georgelin Sébastien Veret La définition : Le Product Lifecycle Management est un ensemble de solutions qui permettent à une entreprise manufacturière
ENOVIA 3DLive IBM PLM Solutions 1 er Octobre 2007 Philippe Georgelin Sébastien Veret La définition : Le Product Lifecycle Management est un ensemble de solutions qui permettent à une entreprise manufacturière
L outil 3D «Grand Territoire» de l Agglomération de Montpellier- De la communication à la participation?
 L outil 3D «Grand Territoire» de l Agglomération de Montpellier- De la communication à la participation? Marc APARICIO, Responsable Service SIG Observatoires Direction Urbanisme et de l Habitat Montpellier
L outil 3D «Grand Territoire» de l Agglomération de Montpellier- De la communication à la participation? Marc APARICIO, Responsable Service SIG Observatoires Direction Urbanisme et de l Habitat Montpellier
Synthèse des réponses au questionnaire
 Etat des lieux sur les réseaux et programmes de Monitoring dans les pays partenaires méditerranéens Synthèse des réponses au questionnaire X. Detienne Aquapôle, Université de Liège Réalisé pour le compte
Etat des lieux sur les réseaux et programmes de Monitoring dans les pays partenaires méditerranéens Synthèse des réponses au questionnaire X. Detienne Aquapôle, Université de Liège Réalisé pour le compte
Solution A La Gestion Des Objets Java Pour Des Systèmes Embarqués
 International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 7, Issue 5 (June 2013), PP.99-103 Solution A La Gestion Des Objets Java Pour Des
International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 7, Issue 5 (June 2013), PP.99-103 Solution A La Gestion Des Objets Java Pour Des
Celestia. 1. Introduction à Celestia (2/7) 1. Introduction à Celestia (1/7) Université du Temps Libre - 08 avril 2008
 1. Introduction à Celestia (1/7) Université du Temps Libre - 08 avril 2008") GMPI*EZVI0EFSVEXSMVIH%WXVSTL]WMUYIHI&SVHIEY\ 1. Introduction à Celestia Celestia 1.1 Généralités 1.2 Ecran d Ouverture 2. Commandes Principales du Menu 3. Exemples d Applications 3.1 Effet de l atmosphère
GMPI*EZVI0EFSVEXSMVIH%WXVSTL]WMUYIHI&SVHIEY\ 1. Introduction à Celestia Celestia 1.1 Généralités 1.2 Ecran d Ouverture 2. Commandes Principales du Menu 3. Exemples d Applications 3.1 Effet de l atmosphère
Perspectives en matière de portails géographiques et de 3D
 Perspectives en matière de portails géographiques et de 3D version du Géoportail de l IGN Aurélien Barbier-Accary (Atos Worldline) et Frédéric Rouas (Diginext) Un groupement d expertises Depuis 2006 et
Perspectives en matière de portails géographiques et de 3D version du Géoportail de l IGN Aurélien Barbier-Accary (Atos Worldline) et Frédéric Rouas (Diginext) Un groupement d expertises Depuis 2006 et
Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière
 Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière Principaux contributeurs: Zhang Xiaopeng (CASIA-NLPR-LIAMA Coordinateur Groupe Image) Li HongJun (CASIA-NLPR-LIAMA
Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière Principaux contributeurs: Zhang Xiaopeng (CASIA-NLPR-LIAMA Coordinateur Groupe Image) Li HongJun (CASIA-NLPR-LIAMA
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Modeling reality with the latest in 3D technology: Virtualisation. Aperçu
 Rencontres art, science, technique & architecture (RASTA_02) De l acquisition à la restitution de données numériques 3D 31 octobre 2002 C2RMF-DMF 6 rue des Pyramides75 041 Paris Modeling reality with the
Rencontres art, science, technique & architecture (RASTA_02) De l acquisition à la restitution de données numériques 3D 31 octobre 2002 C2RMF-DMF 6 rue des Pyramides75 041 Paris Modeling reality with the
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Activités de modélisation 3D Exploitation de certains produits ESRI
 Activités de modélisation 3D Exploitation de certains produits ESRI Dr. Jacynthe Pouliot a.-g. Professeure et directrice par intérim du Département des SCG, Université Laval jacynthe.pouliot@scg.ulaval.ca
Activités de modélisation 3D Exploitation de certains produits ESRI Dr. Jacynthe Pouliot a.-g. Professeure et directrice par intérim du Département des SCG, Université Laval jacynthe.pouliot@scg.ulaval.ca
un nouvel œil pour l analyse de mouvement
 un nouvel œil pour l analyse de mouvement L entreprise EyeNetics La S.A.R.L. EyeNetics a pour objectif de simplifier l utilisation des systèmes d analyse de mouvement. Dans cette optique nous avons conçu
un nouvel œil pour l analyse de mouvement L entreprise EyeNetics La S.A.R.L. EyeNetics a pour objectif de simplifier l utilisation des systèmes d analyse de mouvement. Dans cette optique nous avons conçu
Equation LIDAR : exp 2 Equation RADAR :
 Contexte scientifique Systèmes LIDAR/RADAR Equation LIDAR : exp Equation RADAR : p (r) : puissance rétrodiffusée r : altitude ou profondeur. C : constante instrumentale. β : coefficient de rétrodiffusion
Contexte scientifique Systèmes LIDAR/RADAR Equation LIDAR : exp Equation RADAR : p (r) : puissance rétrodiffusée r : altitude ou profondeur. C : constante instrumentale. β : coefficient de rétrodiffusion
un module de simulation des évolutions urbaines http://geopensim.ign.fr Présentation
 un module de simulation des évolutions urbaines http://geopensim.ign.fr 12 mars 2009 Anne Ruas Annabelle Mas Julien Perret Présentation Plateforme open source d analyse et de simulation des évolutions
un module de simulation des évolutions urbaines http://geopensim.ign.fr 12 mars 2009 Anne Ruas Annabelle Mas Julien Perret Présentation Plateforme open source d analyse et de simulation des évolutions
Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services
 69 Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services M. Bakhouya, J. Gaber et A. Koukam Laboratoire Systèmes et Transports SeT Université de Technologie de Belfort-Montbéliard
69 Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services M. Bakhouya, J. Gaber et A. Koukam Laboratoire Systèmes et Transports SeT Université de Technologie de Belfort-Montbéliard
Évaluation des logiciels et autres réalisations
 DOCUMENT D ANALYSE DE LA COMMISSION D ÉVALUATION DE L INRIA Évaluation des logiciels et autres réalisations Préparé par David Margery, Jean-Pierre Merlet, Cordelia Schmid, Agnès Sulem, Paul Zimmermann
DOCUMENT D ANALYSE DE LA COMMISSION D ÉVALUATION DE L INRIA Évaluation des logiciels et autres réalisations Préparé par David Margery, Jean-Pierre Merlet, Cordelia Schmid, Agnès Sulem, Paul Zimmermann
Business Intelligence
 avec Excel, Power BI et Office 365 Téléchargement www.editions-eni.fr.fr Jean-Pierre GIRARDOT Table des matières 1 Avant-propos A. À qui s adresse ce livre?..................................................
avec Excel, Power BI et Office 365 Téléchargement www.editions-eni.fr.fr Jean-Pierre GIRARDOT Table des matières 1 Avant-propos A. À qui s adresse ce livre?..................................................
Monitoring elderly People by Means of Cameras
 Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Programmation par contraintes. Laurent Beaudou
 Programmation par contraintes Laurent Beaudou On se trouve où? Un problème, une solution : la solution est-elle une solution du problème? simulation, vérification 2 On se trouve où? Un problème, une solution
Programmation par contraintes Laurent Beaudou On se trouve où? Un problème, une solution : la solution est-elle une solution du problème? simulation, vérification 2 On se trouve où? Un problème, une solution
Quantification des Risques
 Quantification des Risques Comment considérer les aléas dans une projection financière? PragmaRisk met à disposition des solutions et des méthodes permettant de considérer les aléas dans vos projections
Quantification des Risques Comment considérer les aléas dans une projection financière? PragmaRisk met à disposition des solutions et des méthodes permettant de considérer les aléas dans vos projections
Une forme générale de la conjecture abc
 Une forme générale de la conjecture abc Nicolas Billerey avec l aide de Manuel Pégourié-Gonnard 6 août 2009 Dans [Lan99a], M Langevin montre que la conjecture abc est équivalente à la conjecture suivante
Une forme générale de la conjecture abc Nicolas Billerey avec l aide de Manuel Pégourié-Gonnard 6 août 2009 Dans [Lan99a], M Langevin montre que la conjecture abc est équivalente à la conjecture suivante
Une variable binaire prédictrice (VI) et une variable binaire observée (VD) (Comparaison de pourcentages sur 2 groupes indépendants)
 et une variable binaire observée (VD) (Comparaison de pourcentages sur 2 groupes indépendants)") CIVILITE-SES.doc - 1 - Une variable binaire prédictrice (VI) et une variable binaire observée (VD) (Comparaison de pourcentages sur 2 groupes indépendants) 1 PRÉSENTATION DU DOSSIER CIVILITE On s intéresse
CIVILITE-SES.doc - 1 - Une variable binaire prédictrice (VI) et une variable binaire observée (VD) (Comparaison de pourcentages sur 2 groupes indépendants) 1 PRÉSENTATION DU DOSSIER CIVILITE On s intéresse
ZOOM SUR 10 DEMONSTRATIONS
 ZOOM SUR 10 DEMONSTRATIONS Colombes, jeudi 3 février 2010 UN SYSTEME DE VIDEO SURVEILLANCE GRANDEUR NATURE Thales révolutionne l affichage des systèmes de vidéo surveillance en permettant aux opérateurs
ZOOM SUR 10 DEMONSTRATIONS Colombes, jeudi 3 février 2010 UN SYSTEME DE VIDEO SURVEILLANCE GRANDEUR NATURE Thales révolutionne l affichage des systèmes de vidéo surveillance en permettant aux opérateurs
Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules
 Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules M. Shawky, K. Chaaban, P. Crubillé Heudiasyc UMR 6599 CNRS, Univ. Tech. De Compiègne 1 ADAS (Advanced Driving Aid System) Reactive
Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules M. Shawky, K. Chaaban, P. Crubillé Heudiasyc UMR 6599 CNRS, Univ. Tech. De Compiègne 1 ADAS (Advanced Driving Aid System) Reactive
Location Intelligence powered by SAP BusinessObjects. Jérôme Berthier, ELCA Informatique SA 29 mai 2013
 Location Intelligence powered by SAP BusinessObjects Jérôme Berthier, ELCA Informatique SA 29 mai 2013 Agenda Présentation d ELCA Introduction sur la problématique Géographique Etude de cas avec utilisation
Location Intelligence powered by SAP BusinessObjects Jérôme Berthier, ELCA Informatique SA 29 mai 2013 Agenda Présentation d ELCA Introduction sur la problématique Géographique Etude de cas avec utilisation
La formation continue Supply Chain & Achats Centrale Paris Executive Education. Ecole Centrale Paris Executive Education
 La formation continue Supply Chain & Achats Centrale Paris Executive Education qui est recruté? qui est formé? Les offres d emplois (200 par mois) représentent la partie visible du marché: tous les autres
La formation continue Supply Chain & Achats Centrale Paris Executive Education qui est recruté? qui est formé? Les offres d emplois (200 par mois) représentent la partie visible du marché: tous les autres
as Architecture des Systèmes d Information
 Plan Plan Programmation - Introduction - Nicolas Malandain March 14, 2005 Introduction à Java 1 Introduction Présentation Caractéristiques Le langage Java 2 Types et Variables Types simples Types complexes
Plan Plan Programmation - Introduction - Nicolas Malandain March 14, 2005 Introduction à Java 1 Introduction Présentation Caractéristiques Le langage Java 2 Types et Variables Types simples Types complexes
Intelligence artificielle et les défis en robotique mobile et autonome
 Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
pour quoi faire? Introduction au Séminaire «Véhicules traceurs» Toulouse le 10/12/2010 03/01/2011 François PEYRET LCPC/MACS/GEOLOC
 Les véhicules v traceurs : pour quoi faire? Introduction au Séminaire «Véhicules traceurs» Toulouse le 10/12/2010 03/01/2011 François PEYRET LCPC/MACS/GEOLOC 1 Plan de l exposl exposé Qu est-ce qu un véhicule
Les véhicules v traceurs : pour quoi faire? Introduction au Séminaire «Véhicules traceurs» Toulouse le 10/12/2010 03/01/2011 François PEYRET LCPC/MACS/GEOLOC 1 Plan de l exposl exposé Qu est-ce qu un véhicule
Nouveaux enjeux de recherche en sécurité routière liés à l'automatisation des véhicules : conséquences sur l'activité de conduite
 Institut français des sciences et technologies des transports, de l aménagement et des réseaux Nouveaux enjeux de recherche en sécurité routière liés à l'automatisation des véhicules : conséquences sur
Institut français des sciences et technologies des transports, de l aménagement et des réseaux Nouveaux enjeux de recherche en sécurité routière liés à l'automatisation des véhicules : conséquences sur
Dossier. Développer en Java sur téléphone mobile. Benjamin Damécourt benjamin.damecourt@me.com. UFR SITEC Master 2 EESC 11 janvier 2012
 Dossier Développer en Java sur téléphone mobile Benjamin Damécourt benjamin.damecourt@me.com UFR SITEC Master 2 EESC 11 janvier 2012 Table des matières Introduction 2 Pré-requis 3 Hello World! 5 Installation
Dossier Développer en Java sur téléphone mobile Benjamin Damécourt benjamin.damecourt@me.com UFR SITEC Master 2 EESC 11 janvier 2012 Table des matières Introduction 2 Pré-requis 3 Hello World! 5 Installation
imaginez-vous un univers de possibilités BOOK2014-2015 imagine yourself in a world of opportunities... http://recrutement.akka.eu
 BOOK2014-2015 imaginez-vous un univers de possibilités imagine yourself in a world of opportunities... http://recrutement.akka.eu BOOK France imaginez-vous un univers de possibilités http://recrutement.akka.eu
BOOK2014-2015 imaginez-vous un univers de possibilités imagine yourself in a world of opportunities... http://recrutement.akka.eu BOOK France imaginez-vous un univers de possibilités http://recrutement.akka.eu
Traitement bas-niveau
 Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
Plan Introduction L approche contour (frontière) Introduction Objectifs Les traitements ont pour but d extraire l information utile et pertinente contenue dans l image en regard de l application considérée.
I Mise en place d un SIG pour la gestion des équipements sur les routes départementales de la Loire I
 I Mise en place d un SIG pour la gestion des équipements sur les routes départementales de la Loire I I Déroulement de la présentation I Les missions de la cellule programmation Le patrimoine routier Le
I Mise en place d un SIG pour la gestion des équipements sur les routes départementales de la Loire I I Déroulement de la présentation I Les missions de la cellule programmation Le patrimoine routier Le
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Les Géodatabases en 9.2
 Les Géodatabases en 9.2 Session Technique Géodatabase 9.2 Versailles SIG 2007 Nouveautés dans les Géodatabases Géodatabase adaptée À la taille de l entreprise À l architecture déployée Aux processus de
Les Géodatabases en 9.2 Session Technique Géodatabase 9.2 Versailles SIG 2007 Nouveautés dans les Géodatabases Géodatabase adaptée À la taille de l entreprise À l architecture déployée Aux processus de
Petit guide pour l installation de CVW sous Linux
 LinuxFocus article number 310 http://linuxfocus.org par Juan Manuel Triana,Carlos Andrés Pérez Petit guide pour l installation de CVW sous Linux L auteur:
LinuxFocus article number 310 http://linuxfocus.org par Juan Manuel Triana,Carlos Andrés Pérez Petit guide pour l installation de CVW sous Linux L auteur:
cabinet conseil en communication L e-mailing orienté client.
 cabinet conseil en communication L e-mailing orienté client. cabinet conseil en communication stratégique & opérationnelle NOTORIETE IMAGE COMMERCE Vous rendre plus visible auprès de vos cibles Audit/conseil
cabinet conseil en communication L e-mailing orienté client. cabinet conseil en communication stratégique & opérationnelle NOTORIETE IMAGE COMMERCE Vous rendre plus visible auprès de vos cibles Audit/conseil
Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point (x 0,y 0,z 0 ) donné :
 donné :") Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Détection des deux roues motorisés par télémétrie laser à balayage
 MEsure du TRAfic des deux-roues MOTOrisés pour la sécurité et l évaluation des risques Détection des deux roues motorisés par télémétrie laser à balayage Séminaire de mi parcours 11 mai 2012 CETE Normandie
MEsure du TRAfic des deux-roues MOTOrisés pour la sécurité et l évaluation des risques Détection des deux roues motorisés par télémétrie laser à balayage Séminaire de mi parcours 11 mai 2012 CETE Normandie
Robotique Mobile. David Filliat
 Robotique Mobile David Filliat Avril 2012 David FILLIAT École Nationale Supérieure de Techniques Avancées ParisTech Robotique Mobile 2 Cette création est mise à disposition selon le Contrat Paternité-Pas
Robotique Mobile David Filliat Avril 2012 David FILLIAT École Nationale Supérieure de Techniques Avancées ParisTech Robotique Mobile 2 Cette création est mise à disposition selon le Contrat Paternité-Pas
Laboratoire 4 Développement d un système intelligent
 DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
INTERNET est un RESEAU D ORDINATEURS RELIES ENTRE EUX A L ECHELLE PLANETAIRE. Internet : interconnexion de réseaux (anglais : net = réseau)
") CS WEB Ch 1 Introduction I. INTRODUCTION... 1 A. INTERNET INTERCONNEXION DE RESEAUX... 1 B. LE «WEB» LA TOILE, INTERCONNEXION DE SITES WEB... 2 C. L URL : LOCALISER DES RESSOURCES SUR L INTERNET... 2 D.
CS WEB Ch 1 Introduction I. INTRODUCTION... 1 A. INTERNET INTERCONNEXION DE RESEAUX... 1 B. LE «WEB» LA TOILE, INTERCONNEXION DE SITES WEB... 2 C. L URL : LOCALISER DES RESSOURCES SUR L INTERNET... 2 D.
Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS
 Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
ALGORITHMIQUE ET PROGRAMMATION En C
 Objectifs ALGORITHMIQUE ET PROGRAMMATION Une façon de raisonner Automatiser la résolution de problèmes Maîtriser les concepts de l algorithmique Pas faire des spécialistes d un langage Pierre TELLIER 2
Objectifs ALGORITHMIQUE ET PROGRAMMATION Une façon de raisonner Automatiser la résolution de problèmes Maîtriser les concepts de l algorithmique Pas faire des spécialistes d un langage Pierre TELLIER 2
Panorama des études à travers les filières. FEEL du 23 octobre 2014
 Panorama des études à travers les filières FEEL du 23 octobre 2014 Plan Structure générale des études à l'ensimag 1A : le tronc commun 2A/3A : entrée dans les filières et spécialisation Modalités du choix
Panorama des études à travers les filières FEEL du 23 octobre 2014 Plan Structure générale des études à l'ensimag 1A : le tronc commun 2A/3A : entrée dans les filières et spécialisation Modalités du choix
La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS
 Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Simulation numérique des procédés de fabrication composites Outils de simulation numérique et ateliers de démonstration
 Conference only in French Places limitées Bayonne 2013 Mercredi 16 janvier 2013 09h00 / 17h30 Compositadour, Parc Technocité, avenue du 8 mai 1945, 64100 Bayonne Simulation numérique des procédés de fabrication
Conference only in French Places limitées Bayonne 2013 Mercredi 16 janvier 2013 09h00 / 17h30 Compositadour, Parc Technocité, avenue du 8 mai 1945, 64100 Bayonne Simulation numérique des procédés de fabrication
<Insert Picture Here>ApExposé. Cédric MYLLE 05 Février 2008. Exposé Système et Réseaux : ApEx, Application Express d Oracle
 ApExposé Cédric MYLLE 05 Février 2008 Exposé Système et Réseaux : ApEx, Application Express d Oracle Sommaire Introduction Les besoins L outil ApEx Le développement d applications
ApExposé Cédric MYLLE 05 Février 2008 Exposé Système et Réseaux : ApEx, Application Express d Oracle Sommaire Introduction Les besoins L outil ApEx Le développement d applications
Logiciel Libre & qualité. Présentation
 Logiciel Libre & qualité Alain RENAULT Grégory SERONT Présentation Alain RENAULT Cetic (2001) Responsable des projets Qualité micro-évaluation évaluations OWPL accompagnements en entreprise FUNDP (1998-2001)
Logiciel Libre & qualité Alain RENAULT Grégory SERONT Présentation Alain RENAULT Cetic (2001) Responsable des projets Qualité micro-évaluation évaluations OWPL accompagnements en entreprise FUNDP (1998-2001)
Dates de rentrée 2015-2016 Master 2
 Dates de rentrée 2015-2016 Sciences, Technologies, Santé Energie électrique et développement durable 9 septembre 10h00 Bâtiment P2 Automatique et systèmes électriques Automatique, Robotique Biodiversité,
Dates de rentrée 2015-2016 Sciences, Technologies, Santé Energie électrique et développement durable 9 septembre 10h00 Bâtiment P2 Automatique et systèmes électriques Automatique, Robotique Biodiversité,
Cerea. Centre d enseignement et de recherche en environnement atmosphérique
 Cerea Centre d enseignement et de recherche en environnement atmosphérique Laboratoire commun École des Ponts ParisTech / EDF R&D Université Paris-Est Le Cerea : une cinquantaine de chercheurs sur trois
Cerea Centre d enseignement et de recherche en environnement atmosphérique Laboratoire commun École des Ponts ParisTech / EDF R&D Université Paris-Est Le Cerea : une cinquantaine de chercheurs sur trois
MODE D EMPLOI. Plateforme de réflexion et de recherche de la CIDEGEF pour un modèle de management francophone
 MODE D EMPLOI Plateforme de réflexion et de recherche de la CIDEGEF pour un modèle de management francophone 1 S INSCRIRE À LA PLATEFORME CIDEGEF Si vous n êtes pas encore inscrit à la plateforme, rien
MODE D EMPLOI Plateforme de réflexion et de recherche de la CIDEGEF pour un modèle de management francophone 1 S INSCRIRE À LA PLATEFORME CIDEGEF Si vous n êtes pas encore inscrit à la plateforme, rien
Information Presse Ford ouvre un nouveau centre de recherche dans la Silicon Valley
 Information Presse Ford ouvre un nouveau centre de recherche dans la Silicon Valley Ford ouvre un nouveau Centre de recherche et d'innovation à Palo Alto pour accélérer son développement de nouvelles technologies
Information Presse Ford ouvre un nouveau centre de recherche dans la Silicon Valley Ford ouvre un nouveau Centre de recherche et d'innovation à Palo Alto pour accélérer son développement de nouvelles technologies
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié michel.fournie@iut-tlse3.fr http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Anne-Sophie FERNANDEZ
 Anne-Sophie FERNANDEZ Courriel : Anne-sophie.fernandez@umontpellier.fr Fonction : Maître de conférences Biographie Anne-Sophie FERNANDEZ est Maître de Conférences au sein de l Université de Montpellier.
Anne-Sophie FERNANDEZ Courriel : Anne-sophie.fernandez@umontpellier.fr Fonction : Maître de conférences Biographie Anne-Sophie FERNANDEZ est Maître de Conférences au sein de l Université de Montpellier.
CA ARCserve Family of Solutions Pricing and Licensing
 CA ARCserve Family of Solutions Pricing and Licensing Catherine Hervier 4/10/11 CA ARCserve r16 Licensing Options Component Module Managed Capacity Monthly Subscription Per Server/ System Backup Server,
CA ARCserve Family of Solutions Pricing and Licensing Catherine Hervier 4/10/11 CA ARCserve r16 Licensing Options Component Module Managed Capacity Monthly Subscription Per Server/ System Backup Server,
Internet. Première génération de services. William El Kaim. http://www-masi.ibp.fr/~william.el-kaim. Première génération de services,v1.
 Internet Première génération de services William El Kaim http://www-masi.ibp.fr/~william.el-kaim William El Kaim & Fabrice Kordon, Laboratoire MASI 1 Internet Un système de liaisons physiques (réseaux)
Internet Première génération de services William El Kaim http://www-masi.ibp.fr/~william.el-kaim William El Kaim & Fabrice Kordon, Laboratoire MASI 1 Internet Un système de liaisons physiques (réseaux)
Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com
 Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com La Suite LOGIX La Suite LOGIX est un ensemble de produits pour le calcul et l optimisation complète des
Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com La Suite LOGIX La Suite LOGIX est un ensemble de produits pour le calcul et l optimisation complète des
Projet de programme pour l enseignement d exploration de la classe de 2 nde : Informatique et création numérique
 Projet de programme pour l enseignement d exploration de la classe de 2 nde : Informatique et création numérique 19 mai 2015 Préambule L informatique est tout à la fois une science et une technologie qui
Projet de programme pour l enseignement d exploration de la classe de 2 nde : Informatique et création numérique 19 mai 2015 Préambule L informatique est tout à la fois une science et une technologie qui
OFFRE WEBINAR BIG DATA PARIS - GLOWBL
 OFFRE WEBINAR BIG DATA PARIS - GLOWBL Présentation Le webinar représente un outil commercial et marketing très performance pour solliciter des conversations très qualifiées avec des prospects. L organisation
OFFRE WEBINAR BIG DATA PARIS - GLOWBL Présentation Le webinar représente un outil commercial et marketing très performance pour solliciter des conversations très qualifiées avec des prospects. L organisation