|
|
|
- Bérengère Lavergne
- il y a 10 ans
- Total affichages :
Transcription
1 1. PRESENTATION Ce robot de type parallélogramme déformable est composé d un bras articulé monté sur un axe vertical. Cette combinaison modulaire conçue pour une grande variété d applications permet de couvrir une très large surface de travail et de réaliser des déplacements rapides et précis. Il est très compact, facile à programmer par apprentissage direct avec joystick ou par un logiciel fonctionnant sous Windows. Les robots CLEM sont livrés avec une carte mémoire générale ou préprogrammée pour s intégrer directement en ligne. 1.1 Avantages AVANTAGES MECANIQUES : AVANTAGES LOGICIELS : Sa modularité et sa dimension permettent une utilisation dans de nombreuses applications Ensemble mécanique rigide. Fiabilité moteur Brushless. Matériaux innovants (carbone). Mécanique simple et fiable. Roulement étanche Répétabilité 0,5 mm. Possibilité de monter un changeur d outils Passage pneumatique et électrique intégré Utilisation d articulation creuse pour le passage des câbles Option : augmentation des entrées et sorties 1.2 Principales applications 1.3 Espace de travail Facilité et rapidité de mise en oeuvre. Un cycle automatique de calibrage peut-être programmé pour chaque mise sous tension. Possibilité d échanger des données avec des périphériques tiers comme des lecteurs codes barre, des systèmes de vision et des PCs. Système de programmation par apprentissage ( PC ou Joystick). Possibilité de limiter volontairement l amplitude des articulations Grande possibilité d'extension. + de 2000 pas de programme Fonctionnement autonome (sans PC), Pas de disque dur Pick and place, machines d'assemblage, chargement et déchargement de machines outils, machines de conditionnement, manipulations en laboratoire médical, classement de produit, etc... Il incombe à l utilisateur d effectuer tous les préparatifs nécessaires à l implantation du bras sur le site. La zone d évolution du bras doit obligatoirement être entourée d une enceinte de sécurité fermée, conforme à la législation du pays, interdisant l accès du personnel à la zone dangereuse. Norme internationale : ISO (1992). Norme française : NF EN 775 (1993) Directive Européenne : Directive machine CEE

2 1.4 Données techniques Course des axes : en X, en Z et en R X:450mm Z:580mm R: 270 Poids embarqué 2 kg Répétabilité 0,5 mm Capacité mémoire 2000 pas de programmes Moteur Brushless pour les 3 axes Pas à pas pour le 4 ième axe Interpolation XYZ simultanément, interpolation 3D Entrées/sorties par module 12 entrées et sorties Nombre de module max. 32 Entrées analogiques 3 Tension des entrées analogiques 0-5 V Interface extérieure RS232 ou USB Poids du bras en 4 axes 25 Kg Poids du coffret électrique 12 Kg Dimensions du coffret électrique 250 x 250 x 250mm Alimentation 220 V 10 A 1.5 Système d équilibrage Le bras est équipé d un système d équilibrage par ressort permettant de compenser le porte-à-faux du poids de la partie embarquée. 1.6 Couples limites Axe de référence Axe 1 Axe 2 Axe 3 Axe 4 Couple statique (Nm) ,5 Note : ces couples sont disponibles pour des charges transportées égales à 0 kg 1.7 Circuit électrique Le circuit électrique de raccordement est composé de câbles blindés dans une gaine de diamètre 25mm Longueur maxi entre la baie et le bras :1,20m Le coffret électrique comprend une alimentation 220v 70 volts, une alimentation 24 v 2A pour le moteur pas à pas et une alimentation 5v 2A pour la partie logique.. Les moteurs brushless fonctionnent sous tension continue de 70 volts et peuvent recevoir un courant de 10 ampères maximum. Les 3 axes principaux sont pilotés par des cartes indépendantes et interchangeables pilotées par des microcontrôleurs et utilisant des transistors IGBT pour la partie puissance. Les blindages ne doivent pas être utilisés comme fil conducteur.

3 1.8 Circuit pneumatique Le raccordement du bras au réseau d air comprimé (6 bars lubrifié ou non) s effectue sur le pied. Quatre canalisations relient le pied à l avant bras en ligne direct. Possibilité de montage d électrovanne ou de venturi directement sur l avant bras du robot. 1.9 Fixation Le bras doit être installé verticalement pied en bas (version fixation au sol). La surface de fixation sera plane. Un support déformable réduira, de façon très significative, les performances de vitesse et de précision du bras. Une version inversée ou tête en bas est à l étude. Bras fixé au sol avec une charge de 2 kg Fv = 690 N Fg = 700 N Cb = 470 Nm Cp = 115 Nm

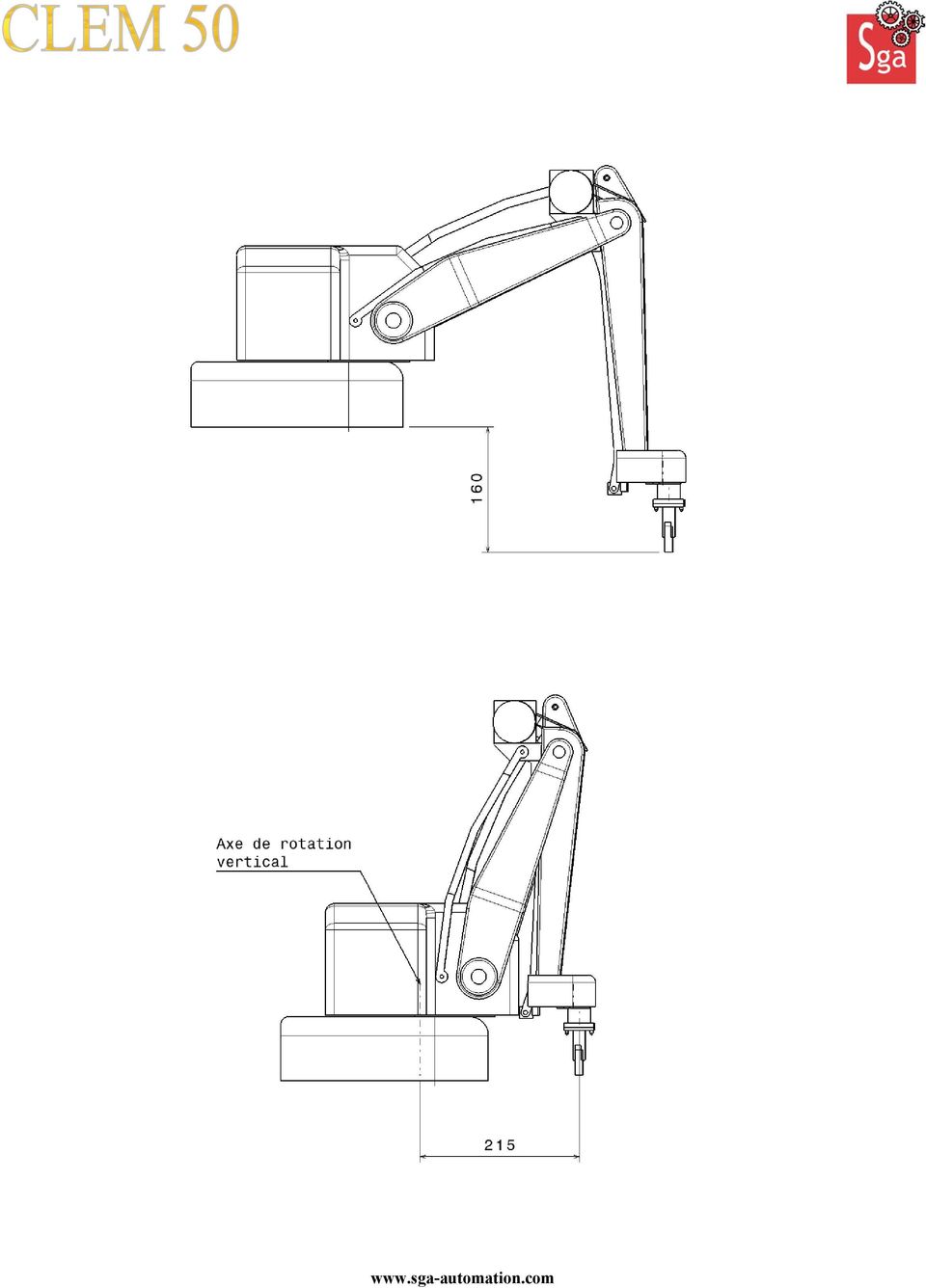
4 2. LES DIFFERENTES PARTIES UTILISABLES Unités de rotation (base du robot) Encombrements Rotation de 0 à 270
 2.3.1.")
5 axes (bras et avant bras) Zone de travail verticale en 2 axes

6 axes (bras, avant bras et rotation du poignet) Zone de travail verticale en 3 axes

7 axes (base, bras, avant bras et poignet) Encombrements en 4 axes SGA 2, rue Alfred Campmas Mont Saint Aignan Tél : +33.(0) Fax : +33.(0)
.")
8
9 Zone de travail verticale en 4 axes SGA 2, rue Alfred Campmas Mont Saint Aignan Tél : +33.(0) Fax : +33.(0)
.232.")
10 Zone de travail horizontale en 4 axes Plan de pose

11 3. LOGICIEL DE COMMANDE 3.1 Présentation Le logiciel de commande est une application sous Windows (2000 ou Xp) utilisable sur tout PC, même un portable, équipé de : Une sortie RS232 ou USB Un écran Un processeur à 1 GHz ou plus. Il s installe automatiquement à partir du CD. Il se pilote à la souris. Il permet de commander toutes les fonctions du robot : Mouvements en mode manuel, avec le clavier du PC ou un joystick. Enregistrement des points de passage et sauvegarde d un mouvement en mémoire. Visualisation du détail du mouvement en code ISO, modification, sauvegarde des modifications. Chargement d un mouvement stocké en mémoire et l exécuter. Vérification d un mouvement en traçant sa trajectoire à l écran. Etude de la trajectoire en faisant varier le point de vue, rotations et zooms. Exécution d un mouvement en mode pas à pas. Initialiser le robot, faire le point 0. Vérifier et modifier les paramètres de vitesse, accélération, régulation des moteurs. Accéder aux paramètres de sécurité, butées logicielles. Lire le manuel d utilisation et d entretien.

12 3.2 Ecran principal Position de la tête en X Y T W soit côte en X, côte en Z (hauteur), angle du bras, angle de la tête. Position des bras en impulsions codeur par rapport au point 0 Valeur de la vitesse en mode manuel Boutons de commande Témoin de mise à zéro Mode d utilisation : Clavier Joystick Programme Boule servant à faire varier le point de vue de l affichage Présentation schématique du robot dans position d origine

13 3.3 Mode programme Le bouton "ouvrir" permet de charger un mouvement à partir de la mémoire Le nom du programme en cours s affiche dans l écran Le bouton "visualiser" ouvre une fenêtre de l éditeur de texte et affiche le code ISO du mouvement 3.4 Format du programme Les mouvements du robot sont enregistrés dans un fichier texte lisible et modifiable par n importe quel éditeur de texte comme le bloc notes de Windows. Chaque ligne doit comporter un N au début, suivi d un numéro. Le numéro n a pas d importance, mais il faut qu il y en ait un. S il n y a pas de N en début de ligne, le programme considèrera que la ligne est un commentaire en n en tiendra pas compte. Les mouvements sont sous la forme d un G01 suivi d une indication de la position d arrivée. Les côtes peuvent être en coordonnées cylindriques X, ZT, W ou X est la distance horizontale en mm entre la pince et l axe de rotation vertical, Z est la distance verticale en mm entre la pince et le plan sur lequel repose la base du robot, T est l angle en degrés à partir de la position milieu de la course du robot, et W est la côte angulaire (en unité de pas du moteur) de la position de la pince. Les côtes peuvent aussi être rentrées en coordonnées cartésiennes X, Y, Z, W. La première ligne doit obligatoirement comporter soit un Y ou soit un T, pour indiquer si on est en cartésien ou en cylindrique. Les coordonnées sont modales, c est à dire qu il n est pas nécessaire de les répéter à chaque ligne, si elles ne changent pas. On n écrit que celles qui changent. Les autres fonctions sont données par les lettres suivantes : F Consigne de vitesse, exemple : N2 F25 donne une consigne de vitesse de 25 %, 100 correspond à la vitesse maximum O Ouverture de la pince (Open) C Fermeture de la pince (Close) P Pause avec un temps en millisecondes (N5 P2000 est une pause de 2 secondes) Il faut obligatoirement un retour à la ligne (touche "entrée") à la fin du programme.

14 3.5. Simulation du mouvement Affichage de la ligne du programme Simulation pas à pas Simulation complète Le mouvement s affiche à l écran. Le trait jaune correspond au premier segment En cliquant sur la boule, on fait tourner la vue, pour mieux voir le mouvement. La croix avec les flèches jaunes permet de faire des translations de la vue et les signes + et font des zooms Mouvement en mode manuel A tout moment, il est possible de faire bouger le robot en mode manuel. Pour de petits mouvements, le plus simple est d utiliser le clavier PC. Il faut se servir du pavé numérique. La vitesse de déplacement est affichée en haut à droite de l écran. Il est possible de la changer en utilisant les boutons avec une flèche vers le haut ou vers le bas, situés juste au-dessus de la vitesse. Pavé numérique Actions Résultat 0 et. La pince bouge Rotation du 4 ème axe (préhenseur) 2 et 3 L axe 1 bouge Rotation autour de l axe vertical 5 et 6 L axe 2 bouge La première partie du bras bouge (la plus grosse) 8 et 9 L axe 3 bouge L avant bras bouge Les mouvements manuels sont aussi possibles avec un joystick ou un joypad, comme décrit précédemment.

15 4. ACCESSOIRES 4.1 Préhenseurs possibles sur le poignet Pinces pneumatiques Pinces électriques Ventouses Changeur d outils pour changer de préhenseur en automatique 4.2 Extensions Le module d entrées-sorties est composé de 12 lignes. Chacune est configurable soit en entrée soit en sortie. Il y a 3 entrées analogiques pour une tension 0-5V. On peut mettre jusqu'à 32 modules (par ailleurs, il faut tenir compte des modules de contrôle de moteur). La programmation conditionnelle est également possible. si une entrée est activée, on exécute un sous-programme de mouvement, Si une entrée différente est activée, on exécute un autre sous-programme. Une sortie est activée à la fin d un sous-programme.

Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
AIDE à l utilisation du cédérom «L athlétisme à l école» Niveau Primaire SOMMAIRE
 AIDE à l utilisation du cédérom «L athlétisme à l école» Niveau Primaire SOMMAIRE Arborescence du cédérom (page 2) Lancement du Cédérom et configuration minimale de votre ordinateur (page 3). Loupe, page
AIDE à l utilisation du cédérom «L athlétisme à l école» Niveau Primaire SOMMAIRE Arborescence du cédérom (page 2) Lancement du Cédérom et configuration minimale de votre ordinateur (page 3). Loupe, page
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
MODE OPÉRATOIRE. VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.
 Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.") VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Leçon 1 : Les principaux composants d un ordinateur
 Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Chapitre 2 Architecture d un ordinateur Leçon 1 : Les principaux composants d un ordinateur Les objectifs : o Identifier les principaux composants d un micro-ordinateur. o Connaître les caractéristiques
Presse Plieuse Synchronisée. Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE. Gamme PSN
 Presse Plieuse Synchronisée Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE Gamme PSN PRESENTATION Cet équipement est une presse plieuse hydraulique à commande numérique. La commande numérique est de
Presse Plieuse Synchronisée Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE Gamme PSN PRESENTATION Cet équipement est une presse plieuse hydraulique à commande numérique. La commande numérique est de
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Ecran programmable. Testez la différence grâce. à sa puissance, sa rapidité. et ses possibilités réseaux
 Ecran programmable Testez la différence grâce à sa puissance, sa rapidité et ses possibilités réseaux Gamme de Produits Compact & hautement fonctionnel Pouces Couleurs Rétro éclairage 3 Ports série Maitre/
Ecran programmable Testez la différence grâce à sa puissance, sa rapidité et ses possibilités réseaux Gamme de Produits Compact & hautement fonctionnel Pouces Couleurs Rétro éclairage 3 Ports série Maitre/
PENDANTS à PLAFOND Pour USI/Anesthésie
 PENDANTS à PLAFOND Pour USI/Anesthésie Rigidité maximale et grande capacité Plages d'action presque illimités Modularité avec possibilité de choix Conception ergonomique Fiche complète de prises et access.
PENDANTS à PLAFOND Pour USI/Anesthésie Rigidité maximale et grande capacité Plages d'action presque illimités Modularité avec possibilité de choix Conception ergonomique Fiche complète de prises et access.
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur.
 C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
Système de bridage rapide main-robot «QL»
 ELEMENTS DE PREHENSION 4 170 Principe général valable pour tous les modèles Élément femelle côté préhenseur Pour permettre le changement rapide des systèmes de préhension, les systèmes de bridages rapides
ELEMENTS DE PREHENSION 4 170 Principe général valable pour tous les modèles Élément femelle côté préhenseur Pour permettre le changement rapide des systèmes de préhension, les systèmes de bridages rapides
LE NOUVEAU SYSTEME DE BRAS PORTEUR
 LE NOUVEAU SYSTEME DE BRAS PORTEUR 28 Même conception Charges admissibles de 600 à 1 800 N Un ensemble complet et cohérent Même design Association possible de versions différentes horizontalement et verticalement
LE NOUVEAU SYSTEME DE BRAS PORTEUR 28 Même conception Charges admissibles de 600 à 1 800 N Un ensemble complet et cohérent Même design Association possible de versions différentes horizontalement et verticalement
INTÉGRABLES. GAMME e10. e10-i61s e10-i113s. Têtes de marquage par rayage
 LES INTÉGRABLES RAYAGE Têtes de marquage par rayage INTÉGRABLES GAMME e10 e10-i61s e10-i113s Technologie Rayage TECHNOLOGIE DE MARQUAGE PAR RAYAGE : MARQUAGE RAPIDE, SILENCIEUX ET PRÉCIS! INTÉGRABLES Le
LES INTÉGRABLES RAYAGE Têtes de marquage par rayage INTÉGRABLES GAMME e10 e10-i61s e10-i113s Technologie Rayage TECHNOLOGIE DE MARQUAGE PAR RAYAGE : MARQUAGE RAPIDE, SILENCIEUX ET PRÉCIS! INTÉGRABLES Le
Utilisation du logiciel GALAAD
 1 Sommaire: Présentation du logiciel GALAAD 1. Démarrer le programme........ 2. Présentation de l écran du logiciel....... Les barres d'outils, sauvegarder... 3. Créer un nouveau fichier........ 4. Préparer
1 Sommaire: Présentation du logiciel GALAAD 1. Démarrer le programme........ 2. Présentation de l écran du logiciel....... Les barres d'outils, sauvegarder... 3. Créer un nouveau fichier........ 4. Préparer
AUTOPORTE III Notice de pose
 AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
SpeechiTablet Notice d utilisation
 SpeechiTablet Notice d utilisation Copyright(C) 2003-2009 Speechi Web: www.speechi.net Tel: 03-20-34-74-25 Fax: 03-20-34-74-26 E-mail: [email protected] Version 1.0.0 1. Introduction... 3 1.1. Contenu de
SpeechiTablet Notice d utilisation Copyright(C) 2003-2009 Speechi Web: www.speechi.net Tel: 03-20-34-74-25 Fax: 03-20-34-74-26 E-mail: [email protected] Version 1.0.0 1. Introduction... 3 1.1. Contenu de
Vous roulez à. le radar préventif. de jour comme de nuit. haute-résistance
 SensibiliseZ vos conducteurs MesUREZ leurs COMPORTEMENTS Fabrication française robuste Conception innovante : assemblage par sertissage d une tôle Alu-zinc ultra robuste et d un profil d entourage triple
SensibiliseZ vos conducteurs MesUREZ leurs COMPORTEMENTS Fabrication française robuste Conception innovante : assemblage par sertissage d une tôle Alu-zinc ultra robuste et d un profil d entourage triple
Interface PC Vivago Ultra. Pro. Guide d'utilisation
 Interface PC Vivago Ultra Pro Guide d'utilisation Version 1.03 Configuration de l'interface PC Vivago Ultra Configuration requise Avant d'installer Vivago Ultra sur votre ordinateur assurez-vous que celui-ci
Interface PC Vivago Ultra Pro Guide d'utilisation Version 1.03 Configuration de l'interface PC Vivago Ultra Configuration requise Avant d'installer Vivago Ultra sur votre ordinateur assurez-vous que celui-ci
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
Etude et développement logiciel Exemples de réalisation
 Etude et développement logiciel Exemples de réalisation SiègeSocial - 24, rue Gustave Madiot - Z.A. Les Bordes - 91070 BONDOUFLE - Tél: 01 69 11 51 00 E-mail: [email protected] - Web site: www.6ta.fr Date de
Etude et développement logiciel Exemples de réalisation SiègeSocial - 24, rue Gustave Madiot - Z.A. Les Bordes - 91070 BONDOUFLE - Tél: 01 69 11 51 00 E-mail: [email protected] - Web site: www.6ta.fr Date de
qwertyuiopasdfghjklzxcvbnmqwerty uiopasdfghjklzxcvbnmqwertyuiopasd fghjklzxcvbnmqwertyuiopasdfghjklzx cvbnmqwertyuiopasdfghjklzxcvbnmq
 qwertyuiopasdfghjklzxcvbnmqwerty uiopasdfghjklzxcvbnmqwertyuiopasd fghjklzxcvbnmqwertyuiopasdfghjklzx COURS DE PERFECTIONNEMENT cvbnmqwertyuiopasdfghjklzxcvbnmq L ordinateur et Windows 2014-2015 wertyuiopasdfghjklzxcvbnmqwertyui
qwertyuiopasdfghjklzxcvbnmqwerty uiopasdfghjklzxcvbnmqwertyuiopasd fghjklzxcvbnmqwertyuiopasdfghjklzx COURS DE PERFECTIONNEMENT cvbnmqwertyuiopasdfghjklzxcvbnmq L ordinateur et Windows 2014-2015 wertyuiopasdfghjklzxcvbnmqwertyui
HELIOS UNITÉ SUSPENDUE
 HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
HELIOS UNITÉ SUSPENDUE INDIVIDUELLE AVEC 1 BRAS À HAUTEUR FIXE code: PS1BLF rev. 5 du 10.02.2006 (dans les illustrations exemples de configuration HELIOS et modules de gaz et eletriques) INFORMATIONS GÉNÉRALES
DISPOSITIF DE BLOCAGE STATIQUE Ø 32 à 100 mm - double effet ISO 15552
 DISPOSITIF DE BLOCAGE STATIQUE Ø 3 à 100 mm - double effet ISO 1555 Séries 53-50 9 PRESENTATION Il est destiné à assurer le maintien et le blocage en position extrême de la tige du vérin sous charge lors
DISPOSITIF DE BLOCAGE STATIQUE Ø 3 à 100 mm - double effet ISO 1555 Séries 53-50 9 PRESENTATION Il est destiné à assurer le maintien et le blocage en position extrême de la tige du vérin sous charge lors
Celestia. 1. Introduction à Celestia (2/7) 1. Introduction à Celestia (1/7) Université du Temps Libre - 08 avril 2008
 1. Introduction à Celestia (1/7) Université du Temps Libre - 08 avril 2008") GMPI*EZVI0EFSVEXSMVIH%WXVSTL]WMUYIHI&SVHIEY\ 1. Introduction à Celestia Celestia 1.1 Généralités 1.2 Ecran d Ouverture 2. Commandes Principales du Menu 3. Exemples d Applications 3.1 Effet de l atmosphère
GMPI*EZVI0EFSVEXSMVIH%WXVSTL]WMUYIHI&SVHIEY\ 1. Introduction à Celestia Celestia 1.1 Généralités 1.2 Ecran d Ouverture 2. Commandes Principales du Menu 3. Exemples d Applications 3.1 Effet de l atmosphère
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN. Machine à commande numérique destinée au tronçonnage des dés.
 MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
Les Supports UC d ordinateur
 Les Supports UC d ordinateur Les solutions pour Unité Centrale sont bien plus que de simples supports pour unités centrales. Voilà de bonnes raisons de choisir les solutions pour UC pour protéger votre
Les Supports UC d ordinateur Les solutions pour Unité Centrale sont bien plus que de simples supports pour unités centrales. Voilà de bonnes raisons de choisir les solutions pour UC pour protéger votre
F.A.Q 1.0 Designer 3D Atex System
 -Sommaire- 1-Comment installer le logiciel?...2 2-Comment créer un projet?...3 3-Comment ouvrir un projet?...4 4-Comment se déplacer en 2D & 3D?...5 5-Comment ajouter des composants?...6 1-Comment installer
-Sommaire- 1-Comment installer le logiciel?...2 2-Comment créer un projet?...3 3-Comment ouvrir un projet?...4 4-Comment se déplacer en 2D & 3D?...5 5-Comment ajouter des composants?...6 1-Comment installer
Logiciel PICAXE Programming Editor
 Logiciel PICAXE Programming Editor Notice réduite 1. Lancer le logiciel PICAXE Programming Editor (Vidéo : «Lancer le programme»). 2. Dessiner un diagramme (Vidéos : «Nouveau programme» et «Dessiner le
Logiciel PICAXE Programming Editor Notice réduite 1. Lancer le logiciel PICAXE Programming Editor (Vidéo : «Lancer le programme»). 2. Dessiner un diagramme (Vidéos : «Nouveau programme» et «Dessiner le
GAMME UviLine 9100 & 9400
 Agro-alimentaire/Biotechnologie/Enseignement/Recherche/Santé/Industrie GAMME UviLine 9100 & 9400 Spectrophotomètres UV & Visible Une combinaison intelligente d innovations n Excellente précision de mesure
Agro-alimentaire/Biotechnologie/Enseignement/Recherche/Santé/Industrie GAMME UviLine 9100 & 9400 Spectrophotomètres UV & Visible Une combinaison intelligente d innovations n Excellente précision de mesure
UviLight XTW Spectrophotomètre UV-Vis
 Enseignement Agro-alimentaire Sciences Chimie Recherche Laboratoires de référence UviLight XTW Spectrophotomètre UV-Vis Accédez aux meilleures performances grâce à des spécificités optiques supérieures
Enseignement Agro-alimentaire Sciences Chimie Recherche Laboratoires de référence UviLight XTW Spectrophotomètre UV-Vis Accédez aux meilleures performances grâce à des spécificités optiques supérieures
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Présentation Module logique Zelio Logic 0 Interface de communication
 c 1 2 3 4 5 6 7 8 9 1 + 0 # = Présentation Module logique Zelio Logic 0 Présentation L offre communication de la gamme Zelio Logic est principalement dédiée à la surveillance ou à la télécommande de machines
c 1 2 3 4 5 6 7 8 9 1 + 0 # = Présentation Module logique Zelio Logic 0 Présentation L offre communication de la gamme Zelio Logic est principalement dédiée à la surveillance ou à la télécommande de machines
Apprendre en pratique - dès le début.
 Apprendre en pratique - dès le début. Les unités de simulation de la gamme KaVo permettent une formation optimale grâce à un agencement flexible des composants de l équipement, une ergonomie excellente
Apprendre en pratique - dès le début. Les unités de simulation de la gamme KaVo permettent une formation optimale grâce à un agencement flexible des composants de l équipement, une ergonomie excellente
APPENDICE B SYSTÈME DE PESAGE INTELLIGENT MODÈLE ILC3 ET LM3D VERSION 1.7
 APPENDICE B SYSTÈME DE PESAGE INTELLIGENT MODÈLE ILC3 ET LM3D VERSION 1.7 TABLE DES MATIÈRES 1. PROGRAMMATION RAPIDE :... B-1 2. PRÉSENTATION :... B-3 3. CARACTÉRISTIQUES :... B-3 3.1. ILC3... B-3 3.2.
APPENDICE B SYSTÈME DE PESAGE INTELLIGENT MODÈLE ILC3 ET LM3D VERSION 1.7 TABLE DES MATIÈRES 1. PROGRAMMATION RAPIDE :... B-1 2. PRÉSENTATION :... B-3 3. CARACTÉRISTIQUES :... B-3 3.1. ILC3... B-3 3.2.
La solution à vos mesures de pression
 Mesure de force linéique La solution à vos mesures de pression Sensibilité Répétabilité Stabilité Le système X3 de XSENSOR propose un concept innovant spécialement adapté pour vos applications de mesure
Mesure de force linéique La solution à vos mesures de pression Sensibilité Répétabilité Stabilité Le système X3 de XSENSOR propose un concept innovant spécialement adapté pour vos applications de mesure
GAMME UVILINE 9100 & 9400
 GAMME UVILINE 9100 & 9400 SPECTROPHOTOMÈTRES UV & VISIBLE NOUVEAU Sipper avec effet peltier Une combinaison intelligente d innovations EXCELLENTE PRÉCISION DE MESURE GRÂCE À UNE OPTIQUE HAUT DE GAMME Gain
GAMME UVILINE 9100 & 9400 SPECTROPHOTOMÈTRES UV & VISIBLE NOUVEAU Sipper avec effet peltier Une combinaison intelligente d innovations EXCELLENTE PRÉCISION DE MESURE GRÂCE À UNE OPTIQUE HAUT DE GAMME Gain
ÉGOUTS ANALISATIONS NETTOYAGE PROFESSIONNEL
 Setting the standard POUR LE NETTOYAGE PROFESSIONNEL DES ANALISATIONS ÉGOUTS Sommaire de déboucheurs moteur électrique de haute performance parfaite qualité de flexible avec gaine riocore système d accouplement
Setting the standard POUR LE NETTOYAGE PROFESSIONNEL DES ANALISATIONS ÉGOUTS Sommaire de déboucheurs moteur électrique de haute performance parfaite qualité de flexible avec gaine riocore système d accouplement
Démarrer et quitter... 13
 Démarrer et quitter... 13 Astuce 1 - Ouvrir, modifier, ajouter un élément dans le Registre... 14 Astuce 2 - Créer un point de restauration... 18 Astuce 3 - Rétablir un point de restauration... 21 Astuce
Démarrer et quitter... 13 Astuce 1 - Ouvrir, modifier, ajouter un élément dans le Registre... 14 Astuce 2 - Créer un point de restauration... 18 Astuce 3 - Rétablir un point de restauration... 21 Astuce
PRECAUTIONS DESCRIPTION DU PRODUIT
 Vous venez d acquérir un produit de la marque Essentiel b et nous vous en remercions. Nous apportons un soin particulier au design, à l'ergonomie et à la simplicité d'usage de nos produits. Nous espérons
Vous venez d acquérir un produit de la marque Essentiel b et nous vous en remercions. Nous apportons un soin particulier au design, à l'ergonomie et à la simplicité d'usage de nos produits. Nous espérons
Tablette Pegasus PC Notes. Code : 0954 201. Conrad sur INTERNET www.conrad.com Version 02/03. 15. Conditions du système.
 Conrad sur INTERNET www.conrad.com N O T I C E Version 02/03 Unité de base (USB) PCNT _ BU05 Crayon électronique PEN1 _ V006 Support bloc notes PCNT _ PAD01 Piles SR41 620004 Mine 9100520 Notice 9100120
Conrad sur INTERNET www.conrad.com N O T I C E Version 02/03 Unité de base (USB) PCNT _ BU05 Crayon électronique PEN1 _ V006 Support bloc notes PCNT _ PAD01 Piles SR41 620004 Mine 9100520 Notice 9100120
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
DS 400 mobil Enregistreur à écran mobile à prix avantageux
 DS 400 mobil Enregistreur à écran mobile à prix avantageux Analyse énergétique - Mesure la consommation - Calcul s fuites dans les installations pneumatiques Consommation / Débit Pression / Vi Température
DS 400 mobil Enregistreur à écran mobile à prix avantageux Analyse énergétique - Mesure la consommation - Calcul s fuites dans les installations pneumatiques Consommation / Débit Pression / Vi Température
Borne VIGILE. Descriptif. Caractéristiques
 Borne VIGILE Descriptif La borne VIGILE intègre un indicateur de pesage, et constitue une interface conviviale entre le chauffeur du véhicule et la réalisation d une pesée. Cette borne permet l affichage
Borne VIGILE Descriptif La borne VIGILE intègre un indicateur de pesage, et constitue une interface conviviale entre le chauffeur du véhicule et la réalisation d une pesée. Cette borne permet l affichage
BAMOSONIC IT. - Mesure de niveau -
 - Mesure de niveau - Le capteur de niveau F est destiné à la mesure de niveau de liquide sur des cuves de forme cylindrique ou rectangulaire avec possibilité d'un affichage en niveau, distance, volume
- Mesure de niveau - Le capteur de niveau F est destiné à la mesure de niveau de liquide sur des cuves de forme cylindrique ou rectangulaire avec possibilité d'un affichage en niveau, distance, volume
Bien travailler sur plusieurs écrans
 Bien travailler sur plusieurs écrans Pour améliorer votre confort sur votre ordinateur et travailler plus efficacement, vous pouvez lui ajouter un second voire un troisième écran. En étendant la surface
Bien travailler sur plusieurs écrans Pour améliorer votre confort sur votre ordinateur et travailler plus efficacement, vous pouvez lui ajouter un second voire un troisième écran. En étendant la surface
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
OCEANE Machine de brasage double vague
 Information générale Un concept de machine qui offre une performance remarquable, machine spécialement conçue pour les petites et moyennes séries, idéal pour toutes les exigences de production. Tout le
Information générale Un concept de machine qui offre une performance remarquable, machine spécialement conçue pour les petites et moyennes séries, idéal pour toutes les exigences de production. Tout le
Travaux pratiques 1.3.2 Détermination de la capacité de stockage des données
 Travaux pratiques 1.3.2 Détermination de la capacité de stockage des données Objectifs Déterminer la quantité de mémoire RAM (en Mo) installée sur un ordinateur Déterminer la taille de l unité de disque
Travaux pratiques 1.3.2 Détermination de la capacité de stockage des données Objectifs Déterminer la quantité de mémoire RAM (en Mo) installée sur un ordinateur Déterminer la taille de l unité de disque
ROTOLINE NOTICE DE POSE
 ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
Boot Camp Guide d installation et de configuration
 Boot Camp Guide d installation et de configuration Table des matières 3 Introduction 4 Configuration requise 5 Vue d ensemble de l installation 5 Étape 1 : Rechercher les mises à jour 5 Étape 2 : Préparer
Boot Camp Guide d installation et de configuration Table des matières 3 Introduction 4 Configuration requise 5 Vue d ensemble de l installation 5 Étape 1 : Rechercher les mises à jour 5 Étape 2 : Préparer
ETAP Safety Manager Systèmes centraux de contrôle et de gestion
 Safety Manager Systèmes centraux de contrôle et de gestion Application Eléments constitutifs Avantages Programme destiné à la surveillance, et à la gestion de l éclairage de sécurité. Il permet l établissement
Safety Manager Systèmes centraux de contrôle et de gestion Application Eléments constitutifs Avantages Programme destiné à la surveillance, et à la gestion de l éclairage de sécurité. Il permet l établissement
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Assistant d e tablissement de Tableaux
 Assistant d e tablissement de Tableaux Cet outil est autonome et doit être installé sur votre ordinateur sous Windows. Cet outil n est pas parfait, il peut proposer des solutions non correctes, le tableau
Assistant d e tablissement de Tableaux Cet outil est autonome et doit être installé sur votre ordinateur sous Windows. Cet outil n est pas parfait, il peut proposer des solutions non correctes, le tableau
Informations produits scalamobil S35 scalacombi S36
 Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Informations produits Sommaire scalamobil S35 scalacombi S36 Aperçu 40 Avantages du produit 41 Visuel du produit 42 Descriptif 43 Accessoires 44 scalacombi S36 46 scalasiège X3 47 Accessoires scalasiège
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
Un ordinateur, c est quoi?
 Un ordinateur, c est quoi? Les composants matériels... 16 Les logiciels... 21 L anatomie d un ordinateur de bureau... 23 L anatomie d un ordinateur portable... 31 Chapitre 1 Un ordinateur, c est quoi?
Un ordinateur, c est quoi? Les composants matériels... 16 Les logiciels... 21 L anatomie d un ordinateur de bureau... 23 L anatomie d un ordinateur portable... 31 Chapitre 1 Un ordinateur, c est quoi?
Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE
 Modem ADSL Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE Port ADSL / ADSL2+ ANSI T1 413 / ITU G.992.1, G.992.3, G.992.5 Annex A (10) 5 ports ethernet 10 / 100 Base-T (9, 2 à 5) 1 ports USB host
Modem ADSL Guide d installation ADSL + TÉLÉPHONE + TV NUMERIQUE Port ADSL / ADSL2+ ANSI T1 413 / ITU G.992.1, G.992.3, G.992.5 Annex A (10) 5 ports ethernet 10 / 100 Base-T (9, 2 à 5) 1 ports USB host
Z-Axis Compliance Device Compliance en z
 Compensation for different vertical positions Collision recognition in Z-direction Protection of parts and work pieces Monitoring of the insertion forces during assembly operations Monitoring of the picking
Compensation for different vertical positions Collision recognition in Z-direction Protection of parts and work pieces Monitoring of the insertion forces during assembly operations Monitoring of the picking
http://cri.univ-lille1.fr Virtualisation de Windows dans Ubuntu Linux
 http://cri.univ-lille1.fr Virtualisation de Windows dans Ubuntu Linux Version 1.0 Septembre 2011 SOMMAIRE 1. Introduction 3 2. Installation du logiciel de virtualisation VirtualBox 4 3. Création d'une
http://cri.univ-lille1.fr Virtualisation de Windows dans Ubuntu Linux Version 1.0 Septembre 2011 SOMMAIRE 1. Introduction 3 2. Installation du logiciel de virtualisation VirtualBox 4 3. Création d'une
Aperçu. S35 Franchir les escaliers en toute sécurité.
 Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
Aperçu S35 Franchir les escaliers en toute sécurité. 34 Avantages du produit Informations produits Avantages du produit Le scalamobil demeure le produit de référence pour représenter la gamme Alber. Le
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
DOCUMENTATION POINT FACTURE
 DOCUMENTATION POINT FACTURE Documentation Point Facture Page 1 sur 30 Introduction Description des fonctionnalités Prise en charge de périphérique de saisie & imprimante Configuration matérielle minimum
DOCUMENTATION POINT FACTURE Documentation Point Facture Page 1 sur 30 Introduction Description des fonctionnalités Prise en charge de périphérique de saisie & imprimante Configuration matérielle minimum
Baies Serveur Rackable et Tower Sécurisation spécifique Accessoires de gamme Évolution VOTRE PARTENAIRE EN ACTION
 Baies Serveur Rackable et Tower Sécurisation spécifique Accessoires de gamme Évolution VOTRE PARTENAIRE EN ACTION La baie ÉVOLUTION pour serveurs se distingue par sa profondeur 900 et sa base ( vérins
Baies Serveur Rackable et Tower Sécurisation spécifique Accessoires de gamme Évolution VOTRE PARTENAIRE EN ACTION La baie ÉVOLUTION pour serveurs se distingue par sa profondeur 900 et sa base ( vérins
Carte Relais GSM (Manuel Utilisateur)
") Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
Carte Relais GSM (Manuel Utilisateur) Carte Relais GSM Introduction Cette carte est une véritable centrale de télécommande et d alarme par GSM. Elle se connecte par un port série à un modem GSM compatible
protection incendie Ouvrant de façade : Orcades
 protection incendie Ouvrant de façade : Orcades FTE 502 130 D Mai 2011 Orcades ouvrant de façade d amenée d air Avantages Esthétique soignée (grille Cyclades en façade intérieure en option). Bonne isolation
protection incendie Ouvrant de façade : Orcades FTE 502 130 D Mai 2011 Orcades ouvrant de façade d amenée d air Avantages Esthétique soignée (grille Cyclades en façade intérieure en option). Bonne isolation
Mini_guide_Isis_v6.doc le 10/02/2005 Page 1/15
 1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
13/11/2009 DUT-MUX-0185 /V2.0
 www.nsi.fr MUXy diag R Guide utilisateur 13/11/2009 DUT-MUX-0185 /V2.0 Auteur : Approbation : Bruno Cottarel C. Andagnotto Page laissée intentionnellement blanche I. Contenu I. CONTENU... 1 II. AVERTISSEMENTS...
www.nsi.fr MUXy diag R Guide utilisateur 13/11/2009 DUT-MUX-0185 /V2.0 Auteur : Approbation : Bruno Cottarel C. Andagnotto Page laissée intentionnellement blanche I. Contenu I. CONTENU... 1 II. AVERTISSEMENTS...
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique...
 1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
Caméra Numérique de Microscopie Couleur USB. Guide d installation
 Caméra Numérique de Microscopie Couleur USB Guide d installation Introduction Félicitations, vous venez de faire l acquisition d un oculaire électronique spécialement adapté pour une loupe binoculaire,
Caméra Numérique de Microscopie Couleur USB Guide d installation Introduction Félicitations, vous venez de faire l acquisition d un oculaire électronique spécialement adapté pour une loupe binoculaire,
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Présentation du Système Informatique Mobile PARADIDACT
 Présentation du Système Informatique Mobile PARADIDACT www.parat.fr pourquoi un Systeme Informatique Mobile PARADIDACT? PARADIDACT : un véritable système modulaire et évolutif. Les ordinateurs portables
Présentation du Système Informatique Mobile PARADIDACT www.parat.fr pourquoi un Systeme Informatique Mobile PARADIDACT? PARADIDACT : un véritable système modulaire et évolutif. Les ordinateurs portables
ENVOI EN NOMBRE DE MESSAGES AUDIO
 ENVOI EN NOMBRE DE MESSAGES AUDIO 2 Téléchargement 3 Installation 7 Ecran d accueil 12 Importation d un fichier d adresses à partir d Excel 15 Création des messages téléphoniques 17 Création du planning
ENVOI EN NOMBRE DE MESSAGES AUDIO 2 Téléchargement 3 Installation 7 Ecran d accueil 12 Importation d un fichier d adresses à partir d Excel 15 Création des messages téléphoniques 17 Création du planning
 ACTIVTE N 2 CONTRAT D ACTIVITE NIVEAU 6 ème Objets techniques Matériaux Energies Evolution objets techniques Réalisation T.I.C DECOUVERTE DU POSTE INFORMATIQUE PRESENTATION DE L ACTIVITE Cette activité
ACTIVTE N 2 CONTRAT D ACTIVITE NIVEAU 6 ème Objets techniques Matériaux Energies Evolution objets techniques Réalisation T.I.C DECOUVERTE DU POSTE INFORMATIQUE PRESENTATION DE L ACTIVITE Cette activité
SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P
 SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P Fabrication de grandes séries avec une efficacité accrue Augmentez la qualité de vos pièces de précision, réduisez vos coûts unitaires et fabriquez
SÉRIE RM Découpeuses-Cambreuses RM 40K / RM 40KS / RM 40P Fabrication de grandes séries avec une efficacité accrue Augmentez la qualité de vos pièces de précision, réduisez vos coûts unitaires et fabriquez
Vanne " Tout ou Rien" à siège incliné Type 3353
 Vanne " Tout ou Rien" à siège incliné Type 3353 Application Vanne "Tout ou Rien" avec servomoteur pneumatique à piston Diamètre nominal DN 15 ( 1 2 ) à 50 (2 ) Pression nominale PN Plage de température
Vanne " Tout ou Rien" à siège incliné Type 3353 Application Vanne "Tout ou Rien" avec servomoteur pneumatique à piston Diamètre nominal DN 15 ( 1 2 ) à 50 (2 ) Pression nominale PN Plage de température
Manuel d utilisation
 Manuel d utilisation Table des matières 1. Fonctionnalités 2. Caractéristiques 3. Pièces et accessoires 4. Vue rapide de l appareil 5. Installation d un disque dur SATA 6. Le logiciel de sauvegarde 6.1
Manuel d utilisation Table des matières 1. Fonctionnalités 2. Caractéristiques 3. Pièces et accessoires 4. Vue rapide de l appareil 5. Installation d un disque dur SATA 6. Le logiciel de sauvegarde 6.1
Dossier 03 Périphériques d acquisition
 Dossier 03 Périphériques d acquisition I. PERIPHERIQUES D ACQUISITION... 1 II. CARACTERISTIQUES GENERALES... 2 A. CLAVIER... 2 B. SOURIS... 3 C. LECTEUR DE CODES A BARRES (OU CODE-BARRES)... 3 D. SCANNER...
Dossier 03 Périphériques d acquisition I. PERIPHERIQUES D ACQUISITION... 1 II. CARACTERISTIQUES GENERALES... 2 A. CLAVIER... 2 B. SOURIS... 3 C. LECTEUR DE CODES A BARRES (OU CODE-BARRES)... 3 D. SCANNER...
Electrique / eau chaude. Discret. Rideaux d air ventilation seule. Simple - intelligent. Confortable - innovant
 PW/PE en applique Electrique / eau chaude Esthétique soignée Commande intégrée ou à distance Barrière thermique de 1 m, 1,5 m et 2 m Confort intérieur ou appoint chauffage Hauteur de montage 2 à 3,5 m
PW/PE en applique Electrique / eau chaude Esthétique soignée Commande intégrée ou à distance Barrière thermique de 1 m, 1,5 m et 2 m Confort intérieur ou appoint chauffage Hauteur de montage 2 à 3,5 m
Module Relais de temporisation DC 24 110 V, programmable
 Caractéristiques techniques indicatives sous réserve de modifications 815006.00 Identification Type ZR6-5006.00 Version du produit Version du fiche technique 00 Application/ Domaine d'utilisation/caractéristiques
Caractéristiques techniques indicatives sous réserve de modifications 815006.00 Identification Type ZR6-5006.00 Version du produit Version du fiche technique 00 Application/ Domaine d'utilisation/caractéristiques
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Catalogue - Formation en «électropneumatique et systèmes automatisés process control system»
 entre echnologies Avancées Catalogue - en «électropneumatique et systèmes automatisés process control system» 2012-2013 Boulevard du Château 12, 7800 ATH Tél : 068/26.88.80 Fax : 068/26.88.81 E-Mail :
entre echnologies Avancées Catalogue - en «électropneumatique et systèmes automatisés process control system» 2012-2013 Boulevard du Château 12, 7800 ATH Tél : 068/26.88.80 Fax : 068/26.88.81 E-Mail :
0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N
 Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
CHALLENGE FORMULA CLASSIC
 REGLEMENT TECHNIQUE 2013 CHALLENGE FORMULA CLASSIC ARTICLE 1 : définition Les monoplaces acceptées dans les épreuves de Formula Classic doivent être dans leur configuration d origine. La cylindrée sera
REGLEMENT TECHNIQUE 2013 CHALLENGE FORMULA CLASSIC ARTICLE 1 : définition Les monoplaces acceptées dans les épreuves de Formula Classic doivent être dans leur configuration d origine. La cylindrée sera
FAG Detector III la solution pour la surveillance et l équilibrage. Information Technique Produit
 FAG Detector III la solution pour la surveillance et l équilibrage Information Technique Produit Principe Utilisation Hautes performances utilisation simple Le FAG Detector III est, à la fois, un appareil
FAG Detector III la solution pour la surveillance et l équilibrage Information Technique Produit Principe Utilisation Hautes performances utilisation simple Le FAG Detector III est, à la fois, un appareil
Support de formation Notebook
 Support de formation Notebook Guide de l utilisateur du tableau interactif SMART Board Table des matières Le Tableau Blanc Interactif... 1 Comprendre le fonctionnement du TBI... 1 Utiliser le plumier
Support de formation Notebook Guide de l utilisateur du tableau interactif SMART Board Table des matières Le Tableau Blanc Interactif... 1 Comprendre le fonctionnement du TBI... 1 Utiliser le plumier
Mini_guide_Isis.pdf le 23/09/2001 Page 1/14
 1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Systèmes de distributeurs Systèmes de distributeur selon la norme ISO 5599-1, taille 2, série 581. Caractéristiques techniques
 ISO 5599-1, taille 2, série 581 Caractéristiques techniques 2 ISO 5599-1, taille 2, série 581 Systèmes de distributeurs Systèmes de distributeur, Série 581 Qn Max. = 2200 l/min Câblage individuel par enfichage
ISO 5599-1, taille 2, série 581 Caractéristiques techniques 2 ISO 5599-1, taille 2, série 581 Systèmes de distributeurs Systèmes de distributeur, Série 581 Qn Max. = 2200 l/min Câblage individuel par enfichage
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
MANUEL D INSTALLATION
 Data Processing Commission Fast Advanced Software for Table soccer - v 1.0 Logiciel de gestion de tournoi de football de table MANUEL D INSTALLATION INSTALLATION INFORMATIQUE DE LA TABLE DE MARQUE & CONFIGURATION
Data Processing Commission Fast Advanced Software for Table soccer - v 1.0 Logiciel de gestion de tournoi de football de table MANUEL D INSTALLATION INSTALLATION INFORMATIQUE DE LA TABLE DE MARQUE & CONFIGURATION
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
Introduction 2 - Précaution 2 - Caractéristiques techniques 2 - Contenu 3
 Tablette:Mise en page 1 23/09/2011 09:15 Page 1 SOMMAIRE Introduction 2 - Précaution 2 - Caractéristiques techniques 2 - Contenu 3 Prise en main 4 - Installer la pile dans le stylet 4 - Changer la pointe
Tablette:Mise en page 1 23/09/2011 09:15 Page 1 SOMMAIRE Introduction 2 - Précaution 2 - Caractéristiques techniques 2 - Contenu 3 Prise en main 4 - Installer la pile dans le stylet 4 - Changer la pointe