Chapitre 0 : Généralités sur la robotique 1/125
|
|
|
- Gabriel Sylvain
- il y a 10 ans
- Total affichages :
Transcription
1 Chapitre 0 : Généralités sur la robotique 1/125

2 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs et commandé par un calculateur qui est destiné à effectuer une grande variété de tâches. Historique : 1947 : premier manipulateur électrique téléopéré : premier robot programmable : apparition d'un robot sur une chaîne de montage de General Motors : premier robot avec contrôle en effort : utilisation de la vision pour commander un robot. 6 Classes de robots selon la JIRA (Japan Industrial Robot Association) Unimate 2/125

3 Disciplines de la robotique Mécanique : conception, réalisation, modélisation des robots. Electronique : mise en place de composants pour les robots, (télé)communications Informatique : création de programmes destinés à la gestion du transfert d information entre les différents composants du robot. Automatique : commande, calibrage des capteurs, des effecteurs, identification des paramètres Traitement du signal : analyse des informations enregistrées par les capteurs du robot. Mathématiques : modèles mathématiques pour la prise de décision ou/et l apprentissage, calcul de trajectoires, localisation, planification. Sciences cognitives : interactions homme-machine, machine-machine, prise de décision. 3/125

4 Différentes structures de robots Deux structures principales : Robots manipulateurs : robots à base fixe permettant de manipuler des objets Robots mobiles : robots permettant de se déplacer. Parfois ils transportent sur leur plateforme un robot manipulateur. Eléments de technologie : Actionneurs Guidage et transmission Capteurs Interfaçage avec un contrôleur 4/125

5 Vocabulaire Effecteur = outil Organe terminal = dernier corps mobile Axe = articulation Corps Base = corps fixe POIGNET PORTEUR 5/125

6 Vocabulaire Configuration articulaire Position et orientation des différents corps du robots les uns par rapport aux autres Configuration opérationnelle Position et orientation du corps terminal par rapport au corps de base (indépendamment des autres corps) En général, pas de bijection existence de modes d assemblage, redondance. distinguer le nombre d axes et le nombre de degrés de liberté de l effecteur (DDL) 6/125

7 Paramétrage articulaire j 2 q 2 j 3 i 3 j 1 q 1 j 0 i 1 i 0 i 2 q 3 on attache un repère à chaque corps on définit un angle entre les axes des repères successifs on regroupe 3 angles dans un vecteur des paramètres articulaires q. q q q q T 7/125

8 Paramétrage opérationnel y O T j T i T j 0 O 0 i 0 x x y T x 8 / 117

9 Modèle géométrique direct j 2 l 1 q 2 j 3 i 3 j 1 i 1 i 2 l 2 q 3 l 3 j 0 q 1 i 0 9 / 117

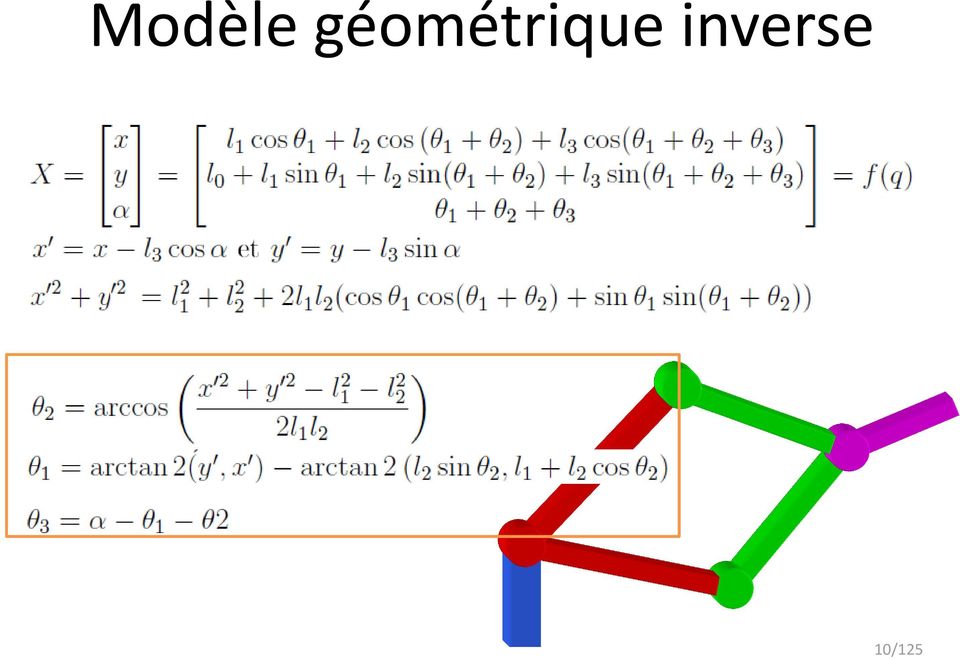
10 Modèle géométrique inverse 10/125
11 Nb d axes vs nb de DDL de l effecteur Soit un robot possédant n axes. Le nombre de DDL maximal pour l effecteur est : m max = inf(n,6) Singularité : lorsque le nombre m de DDL de l effecteur est inférieur à m max. Singularité permanente = jamais m n atteint m max. Configuration singulière = m vaut m max en général, mais pas dans certaines configurations. 11/125


12 Modélisation cinématique 12/125

13 Caractérisation des robots manipulateurs Description de la cinématique Nombre d axes (nombres d actionneurs commandés) Nombre de degrés de liberté de l effecteur (classe des déplacements engendrés) Structure du robot Schéma cinématique 13/125
 Structure du robot Schéma")
 : 3 rotations 1 translation verticale Robots très rapides et précis")
 www.sankyoseiki.co.jp/fa/index-e.html www.")
14 Les robots SCARA SCARA : Selective Compliance Assembly Robot Arm 4 axes (articulations) : 3 rotations 1 translation verticale Robots très rapides et précis Plutôt bon marché Usage limité aux applications quasi plane (mouvements dans la plan horizontal + une translation verticale) /125
 www.sankyoseiki.co.jp/fa/index-e.html www.")
15 Les robots cylindriques Coordonnées cylindriques 3 axes (articulations) : 1 translation verticale 1 rotation d axe vertical 1 translation horizontale Robots très rapides Robot cylindrique SEIKO 15/125

16 Les robots sphériques Coordonnées sphériques 3 axes (articulations) : 1 rotation d axe vertical 1 rotation d axe horizontal 1 translation Robot sphérique FANUC 16/125

17 Les robots à parallélogramme Rigidité à moindre masse Actionneurs près de la base com/robots.htm o.com/rfa/index.html 17/125

18 Les robots 6 axes anthropomorphes Par rapport aux robots à parallélogramme : plus léger plus dextre moins rigide plus grand domaine accessible moins de charge utile Stäubli 18/125

19 Les robots cartésiens Constitués uniquement d axes en translation : axes perpendiculaires 2 à 2. commande simplifiée. possibilité d insérer un poignet pour ajouter des d.d.l. en rotation. série : faible rigidité. portique : grand encombrement. guidage et mesure de précision. Toshiba LSIIT / GRAViR 19/125

20 Les robots parallèles Plusieurs chaînes cinématiques en parallèle grande rigidité. légers et rapides (moteurs sur base fixe) Efforts importants petit espace de travail COMAU Simulateur de vol 20/125

21 Les robots redondants nombre d axes n > nombre de degrés de liberté de l effecteur grande maniabilité. infinité de configurations articulaires pour une même position de l effecteur commande complexe. applications avancées Kuka LWR 21/125
 pour au moins une orientation Cartésien SCARA Cylindrique Sphérique Anthrop. 22/125")
22 Caractérisation des robots Volume accessible manipulateurs Volume de travail du robot, difficile à représenter pour 6DDL Il dépend de : la cinématique du robot, la longueur des segments, les butées articulaires Graphiquement, on donne le volume accessible d un point (centre outil, centre poignet) pour au moins une orientation Cartésien SCARA Cylindrique Sphérique Anthrop. 22/125
23 Caractérisation des robots manipulateurs Précision du positionnement Le positionnement du robot est soumis à de nombreuses erreurs : erreurs de mesure (quantification, erreurs sur le zéro), jeux, flexibilités, erreurs dans la modélisation géométrique du robot (longueurs, ) Le positionnement absolu est en général mauvais (un à plusieurs millimètres). La répétabilité est bien meilleure (d un ordre au moins): c est la précision de reproduction d un mouvement répété plusieurs fois avec la même charge. C est le paramètre adapté lorsque l on considère des cycles répétitifs avec une programmation par apprentissage Performances dynamiques Vitesse maximale : seule la vitesse maximale au niveau des articulations a un sens. les constructeurs donnent souvent la vitesse maximale en bout de bras, dans la configuration la plus favorable. Capacités d accélération Déterminées à partir des couples nominaux des moteurs et du modèle dynamique du robot. Dépendent de la charge et de la configuration. 23/125
24 Charge utile Caractérisation des robots manipulateurs C est la charge maximale telle que les autres performances du robot (précision, vitesse max, ) sont garanties quelle que soit la position Très inférieure à la charge maximale que peut porter le robot dans la configuration la plus favorable. La configuration la plus défavorable est en général «bras tendu horizontal». Spécifié par une masse et une distance maximale entre le «centre outil» et le centre de gravité de la charge (influence des moments). 24/125
25 Différentes structures de robots Deux structures principales : Robots manipulateurs : robots à base fixe permettant de manipuler des objets Robots mobiles : robots permettant de se déplacer. Parfois ils transportent sur leur plateforme un robot manipulateur. Eléments de technologie : Actionneurs Guidage et transmission Capteurs Interfaçage avec un contrôleur 25/125
26 Robots à roues Caractérisés par : le nombre d essieux, le nombre de roues, le type de roues, articulations entre les essieux, et la mobilité qui en résulte. Deux grandes catégories : Robots omnidirectionnels, Robots non holonomes 26/125
27 Robot unicycle Un seul essieu, deux roues motrices indépendantes. La stabilité de la plateforme est assurée en général par des roues folles (ou des appuis glissants). Robot Epuck utilisé en TP 27/125
28 Non-holonomie Contrainte holonome = équation algébrique liant les variables d état. Concrètement, ici, x, y et q ne varient pas de façon indépendante. (beaucoup d illustrations de la partie robotique mobile sont empruntées au polycopié de B. Bayle à l ENSPS : ) Conséquence : la plateforme peut aller n importe où, mais pas par n importe quel chemin => besoin de planifier (problème du créneau). 28/125
29 Modèle cinématique Relie les vitesses de commande aux vitesses opérationnelles 29/125

30 Exemple de robot unicycle Odométrie = mesure de la rotation des roues pour connaître le déplacement et du robot, par intégration dans le temps, sa position dans le plan. 30/125
31 Le Segway Pas d autonomie décisionnelle (pas vraiment un robot, mais issu de la robotique) Gestion dynamique de l équilibre (pendule inverse). 31/125
32 Voitures autonomisées 2 ou 4 roues motrices / différentiel Véhicules existants auxquels on ajoute des organes de commande et des capteurs. Voir le challenge DARPA. 32/125

33 Robots omnidirectionnels Comme leur nom l indique, Roues suédoises : peuvent «glisser» latéralement. Problème : odométrie. 33/125
34 Robots tous-terrains à essieux articulés Exemple : Roburoc 6 (ISIR Robosoft). 34/125
35 Autres formes de robots mobiles Robots à pattes : Caractérisés d abord par le nombre de pattes. Allures statiques vs allures dynamiques. 35/125
36 Robots humanoïdes Robots mobiles à 2 pattes avec des capacités de manipulation Interactivité 36/125
37 Différentes structures de robots Deux structures principales : Robots manipulateurs : robots à base fixe permettant de manipuler des objets Robots mobiles : robots permettant de se déplacer. Parfois ils transportent sur leur plateforme un robot manipulateur. Eléments de technologie : Actionneurs Guidage et transmission Capteurs Interfaçage avec un contrôleur 37/125
38 Actionneurs utilisés en robotique de manipulation. Moteurs électriques : Le plus simple est aussi celui qui, historiquement, a équipé les premiers robots industriels : le moteur à courant continu. Induit bobiné Inducteur Ventilateur Balais Collecteur Il est aussi celui qui permet un meilleur contrôle du couple (par d ondulation). 38/125
39 Moteurs CC sans balais (brushless) La quasi totalité des robots industriels actuels utilise des moteurs brushless. Leur commande est plus complexe mais ils ont un meilleur rapport poids/puissance. Principes généraux : L aimant est le rotor (d où l absence de balais). Le stator est constitué de plusieurs bobines que l on alimente avec des tensions déphasées de façon à faire tourner le champ. Les champs ayant tendance à s aligner, le rotor tourne de façon synchrone avec la vitesse de rotation du champ statorique. Le couple est proportionnel au courant. Documentation Faulhaber 39/125
40 Actionneurs hydrauliques Excellent rapport poids puissance mais comportement très non linéaire. S utilise en montage direct, sans transmission Vanne de surpression Accumulateur BP HP BP distributeur D x > 0 Pompe q B q A Vérin Réservoir A B y > 0 Ces actionneurs sont utilisés pour des robots en général assez peu précis, mais avec des capacités de charge très élevées. Certaines servo-valves fonctionnent en débit (vitesse), d autres en pression (couple/force). 40/125
41 Différentes structures de robots Deux structures principales : Robots manipulateurs : robots à base fixe permettant de manipuler des objets Robots mobiles : robots permettant de se déplacer. Parfois ils transportent sur leur plateforme un robot manipulateur. Eléments de technologie : Actionneurs Guidage et transmission Capteurs Interfaçage avec un contrôleur 41/125
42 Guidage et transmission Guidage = ce qui sert à contraindre le mouvement d une pièce à une autre. Transmission = ce qui sert à transmettre la puissance mécanique de l actionneur à la charge qu il anime. Fonctions DISTINCTES Robot avec guidage et sans transmission = les corps du robot sont articulés mais le robot est passif, il n a pas de capacités de se mouvoir. 42/125
43 Les problèmes du guidage Précision (jeu, déformations). Frottements que l on peut limiter En diminuant le coefficient de frottement des pièces qui glissent les unes sur les autres (choix des matériaux, états de surface, lubrification) En évitant le glissement et en privilégiant le roulement sans glissement Résistance aux charges selon les directions perpendiculaires aux mouvements. 43/125
44 Roulements Pour assurer la rotation d un arbre. Jamais seul. 44/125
45 De très nombreuses variantes Roulements à billes, à rouleaux, à aiguilles, à rotule, butées à billes, etc.etc. Palier auto-aligneur Combinaison butée à billes et roulement à aiguilles 45/125
46 Guidages linéaires Pour des mouvements de translation. Mêmes principes de diminution des frottements. Rails de guidage lisses ou à billes Problèmes de porte-à-faux. 46/125
47 Principe général d une transmission mécanique Un moteur électrique tourne «rapidement» et produit un couple «faible» (en comparaison de ce qui est utile pour engendrer les mouvements d un robot) On connecte donc en général le moteur au corps du robot à travers un organe de transmission, qu on appelle réducteur. Principe : 1 La vitesse est divisée par N : qs qm N Le couple est multiplié par N : N est le rapport de réduction s N m Ceci suppose bien sûr que la transmission ne dissipe pas de puissance. 47/125
48 Pignons et courroies + : simplicité de mise en œuvre, peu de jeu, bonne réversibilité, miniaturisation - : N assez petit, élasticité. 48/125

49 Engrenages (1) Engrenages cylindriques droits : A : externes, B : internes, C : pignon/crémaillère A B C Engrenages hélicoïdaux : A : arbres parallèles, B : arbres perpendiculaires, A B + : chaînage et montage simples, très couramment utilisés. - : compromis difficile entre jeu et pertes d énergie par frottements, mauvaise réversibilité, encombrement (donc poids), peu de dents en contact en même temps (limite la charge) 49/125

50 Engrenages (2) Engrenages coniques : A : droits (90 ), B : angle quelconque. A B Trains planétaires ou épicycloïdaux + : compacité, coaxialité, grand rapport de réduction. - : fabrication complexe, frottements élevés (ou jeu important), très mauvaise réversibilité. 50/125
51 Transmission rotation translation par vis à bille Principe = liaison vis-écrou, avec des billes au niveau du filetage pour limiter les frottements. pas de jeu, réversibilité correcte (selon les modèles). 51/125
52 Transmission à câbles Peu de frottements très bonne transmission des efforts bonne réversibilité. Montage complexe (performance dépendante du montage). Effet de la tension sur les guidages. Vieillissement. Faible rapport de réduction. Poulies pour l alignement / la tension des câbles Plusieurs tours sur l arbre moteur 52/125
53 Exemple d une transmission à câble sur le robot WAM (Makoplasty) 53/125
54 Différentes structures de robots Deux structures principales : Robots manipulateurs : robots à base fixe permettant de manipuler des objets Robots mobiles : robots permettant de se déplacer. Parfois ils transportent sur leur plateforme un robot manipulateur. Eléments de technologie : Actionneurs Guidage et transmission Capteurs ² Interfaçage avec un contrôleur 54/125
 : La mesure de position consiste alors à compter les impulsions.")
55 Codeurs optiques Étrier fixe phototransistor LED Arbre mobile Lorsque l arbre tourne, le phototransistor produit un signal carré (après mise en forme) : La mesure de position consiste alors à compter les impulsions. 55/125
56 Codeurs optiques incrémentaux Deux voies (A et B) sont gravées, avec décalage de 1/4 de période. Sur chaque voie, 1 phototransistor Signaux délivrés : A B Le déphasage entre A et B permet de déterminer le sens de rotation (bascule D) Top tour : voie supplémentaire avec une seule encoche C La voie C n est utilisée que pour l initialisation de la mesure 56/125
57 Codeurs optiques incrémentaux 57/125
. 58/125")
58 Codeurs optiques absolus Codeur optique absolu Principe de comptage Pb : pour un même encombrement, la résolution est réduite par rapport à un codeur incrémental. Nombre de fils importants (non négligeable en robotique). 58/125
59 Différentes structures de robots Deux structures principales : Robots manipulateurs : robots à base fixe permettant de manipuler des objets Robots mobiles : robots permettant de se déplacer. Parfois ils transportent sur leur plateforme un robot manipulateur. Eléments de technologie : Actionneurs Guidage et transmission Capteurs Interfaçage avec un contrôleur 59/125
60 BUS de communication Principe général CPU Carte(s) de sortie Amplification de puissance Actionneurs Carte(s) d entrée Mise en forme Capteurs articulaires E/S logiques Mise en forme Ampl. Puiss. Butées, validations, Contrôleur Interface Robot 60/125
61 Amplification de puissance Rôles : Amplifier la puissance des signaux électriques de sortie du contrôleur numérique. Exemple : une sortie analogique +-10V, 50mA (0,5 W maxi) ne peut alimenter un moteur électrique 10V-3A maxi (30 W). Réaliser un asservissement de bas niveau permettant de : Sécuriser le fonctionnement de l actionneur. Linéariser le comportement de l actionneur / de l axe. Accéder depuis le contrôleur numérique à une grandeur particulière de commande. 61/125
62 Cartes d entrée/sortie Servent à la connexion entre le calculateur numérique et le robot. Sont placées sur un bus de données (bus ISA sur les anciens PC, bus PCI sur les PC récents, bus industriels : VME par exemple). Sont identifiées par une adresse (ISA) ou un identificateur (PCI - cartes reconnues au boot). Sont accessibles par un pilote (driver) fourni avec la carte, qui n est rien d autre qu une bibliothèque de fonctions du type: SortieAnalogique(double valeur, int adr_carte, int num_voie); LectureCodeur(int* valeur_lue, int adr_carte, int num_voie); Souvent, une fonction de sortie écrit la valeur à envoyer dans une case mémoire 1 de la carte, puis écrit dans une case 2 un code particulier qui déclenche la production de la sortie Souvent, une fonction d entrée écrit dans une case mémoire 3 un code particulier qui provoque l acquisition et la copie de la valeur à acquérir dans une case mémoire 4, puis procède à la lecture de la case mémoire 4. Certaines fonctions d entrée sont bloquantes, donc à utiliser avec précaution dans le contexte temps réel. 62/125
63 Cartes d axe Parfois, les fonctions d interfaçage entrée/sortie sont réalisées par une même carte, qui comporte aussi un microcontrôleur. Celui-ci est utilisé pour l asservissement de la vitesse et/ou de la position de l axe. On parle alors de carte d axe. Depuis la CPU, on peut alors : Utiliser la carte d axe en mode transparent, comme une carte d entrée et de sortie. Utiliser la carte d axe en mode asservissement. Une carte d axe permet de libérer la CPU des calculs de bas niveau. 63/125
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
André Crosnier LIRMM 04 67 41 86 37 [email protected]. ERII4, Robotique industrielle 1
 André Crosnier LIRMM 04 67 41 86 37 [email protected] ERII4, Robotique industrielle 1 Obectifs du cours 1. Définitions et terminologie 2. Outils mathématiques pour la modélisation 3. Modélisation des robots
André Crosnier LIRMM 04 67 41 86 37 [email protected] ERII4, Robotique industrielle 1 Obectifs du cours 1. Définitions et terminologie 2. Outils mathématiques pour la modélisation 3. Modélisation des robots
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Entraînements personnalisés
 67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
Actionneur d'ouvre portail
 Actionneur d'ouvre portail Non présent sur le système pédagogique Portail en position A "Fusible" Redresseur Relais Moteur asynchrone monophasé, Pompe hydraulique à engrenage, Vérin hydraulique double
Actionneur d'ouvre portail Non présent sur le système pédagogique Portail en position A "Fusible" Redresseur Relais Moteur asynchrone monophasé, Pompe hydraulique à engrenage, Vérin hydraulique double
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES
 NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
NOTRE OFFRE GLOBALE STAGES INTER-ENTREPRISES HYDRAULIQUE MOBILE 5 Stages de 4 jours ----- HM1 HM2 HM3 HM4 HM5 2 Stages SAUER DANFOSS de 2 jours ----- PVG 32 ----- POMPE 90 MOTEUR 51 ELECTRONIQUE EMBARQUEE
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
L AUTOMATISME LE SIGNAL
 L AUTOMATISME LE SIGNAL Page 1 sur 7 Sommaire : 1- Champ de l automatisme définitions 2- Correspondance entre phénomènes physiques et signaux a. Capteur b. Exemple de capteur TOR c. Exemple de capteur
L AUTOMATISME LE SIGNAL Page 1 sur 7 Sommaire : 1- Champ de l automatisme définitions 2- Correspondance entre phénomènes physiques et signaux a. Capteur b. Exemple de capteur TOR c. Exemple de capteur
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE SUJET
 SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
SESSION 2010 France métropolitaine BREVET DE TECHNICIEN SUPÉRIEUR AGRICOLE ÉPREUVE N 2 DU PREMIER GROUPE ÉPREUVE SCIENTIFIQUE ET TECHNIQUE Option : Génie des équipements agricoles Durée : 3 heures 30 Matériel
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
2 La technologie DTC ou le contrôle direct de couple Guide technique No. 1
 ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
Les. Actionneurs. Introduction. Sommaire. Au passage savez-vous que... Asimo, un robot humanoïde capable de marcher et courir.
 Actionneurs Les Asimo, un robot humanoïde capable de marcher et courir. Robot industriel permettant d imiter des mouvements pénibles, voire dangereux. Et si les machines arrivaient à recréer les mouvements
Actionneurs Les Asimo, un robot humanoïde capable de marcher et courir. Robot industriel permettant d imiter des mouvements pénibles, voire dangereux. Et si les machines arrivaient à recréer les mouvements
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Glissière linéaire à rouleaux
 LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
BIFFI. Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in.
 Actionneurs GIG/GIGS à gaz direct de Biffi BIFFI Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in. Caractéristiques et avantages Cylindres
Actionneurs GIG/GIGS à gaz direct de Biffi BIFFI Actionneurs quart de tour à gaz direct, double effet et rappel par ressort Couple de sortie jusqu à 6,500,000 lb.in. Caractéristiques et avantages Cylindres
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
Presse Plieuse Synchronisée. Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE. Gamme PSN
 Presse Plieuse Synchronisée Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE Gamme PSN PRESENTATION Cet équipement est une presse plieuse hydraulique à commande numérique. La commande numérique est de
Presse Plieuse Synchronisée Gamme PSN SPECIFICATIONS TECHNIQUES PRESSE PLIEUSE Gamme PSN PRESENTATION Cet équipement est une presse plieuse hydraulique à commande numérique. La commande numérique est de
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Formations spécifiques
 Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
Calcul des pertes de pression et dimensionnement des conduits de ventilation
 Calcul des pertes de pression et dimensionnement des conduits de ventilation Applications résidentielles Christophe Delmotte, ir Laboratoire Qualité de l Air et Ventilation CSTC - Centre Scientifique et
Calcul des pertes de pression et dimensionnement des conduits de ventilation Applications résidentielles Christophe Delmotte, ir Laboratoire Qualité de l Air et Ventilation CSTC - Centre Scientifique et
3/11_WHEEL ROADER/KE's仏語 04.3.11 5:13 PM ページ 3 KUBOTA WHEEL LOADER
 KUBOTA WHEEL LOADER Puissantes, polyvalentes, et souples d utilisation, nos chargeuses sur roues offrent des performances optimales pour une grande variété d applications. Charger, reboucher, niveler,
KUBOTA WHEEL LOADER Puissantes, polyvalentes, et souples d utilisation, nos chargeuses sur roues offrent des performances optimales pour une grande variété d applications. Charger, reboucher, niveler,
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
T500 DUAlTACH. JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence TACHYMETRE 2 CANAUX
 02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
Modélisation et Simulation
 Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
Génie Industriel et Maintenance
 Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
GLOSSAIRE A L USAGE DU FORMATEUR DE CONDUITE TOUT-TERRAIN
 GLOSSAIRE A L USAGE DU FORMATEUR DE CONDUITE TOUT-TERRAIN Auteurs Comité pédagogique «COD 3» de l ECASC Glossaire «Formateur de conduite tout terrain» A Angle d attaque : Angle formé par le sol, le point
GLOSSAIRE A L USAGE DU FORMATEUR DE CONDUITE TOUT-TERRAIN Auteurs Comité pédagogique «COD 3» de l ECASC Glossaire «Formateur de conduite tout terrain» A Angle d attaque : Angle formé par le sol, le point
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB
 Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR. Lecteurs optiques numériques
 ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l Ingénieur CONCOURS D ADMISSION 2010 COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR (Durée : 4 heures) L utilisation des calculatrices
ÉCOLE POLYTECHNIQUE FILIÈRE MP Option Physique et Sciences de l Ingénieur CONCOURS D ADMISSION 2010 COMPOSITION DE PHYSIQUE ET SCIENCES DE L INGÉNIEUR (Durée : 4 heures) L utilisation des calculatrices
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Baccalauréat technologique annale zéro
 éduscol Baccalauréat technologique STI2D Enseignements technologiques transversaux Annale zéro n 2 (Coefficient 8 Durée 4 heures) Aucun document autorisé Calculatrice autorisée ÉTUDE DU BARRAGE DU MONT
éduscol Baccalauréat technologique STI2D Enseignements technologiques transversaux Annale zéro n 2 (Coefficient 8 Durée 4 heures) Aucun document autorisé Calculatrice autorisée ÉTUDE DU BARRAGE DU MONT
L AMDEC un outil puissant d optimisation de la maintenance, application à un motocompresseur d une PME marocaine
 L AMDEC un outil puissant d optimisation de la maintenance, application à un moto d une PME marocaine Brahim HERROU*, Mohamed ELGHORBA** *Ecole Supérieure de Technologie BP. 2427 Route Imouzzer Fes [email protected]
L AMDEC un outil puissant d optimisation de la maintenance, application à un moto d une PME marocaine Brahim HERROU*, Mohamed ELGHORBA** *Ecole Supérieure de Technologie BP. 2427 Route Imouzzer Fes [email protected]
F = B * I * L. Force en Newtons Induction magnétique en teslas Intensité dans le conducteur en ampères Longueur du conducteur en mètres
 LE M O TE U R A C O U R A N T C O N TI N U La loi de LAPLACE Un conducteur traversé par un courant et placé dans un champ magnétique est soumis à une force dont le sens est déterminée par la règle des
LE M O TE U R A C O U R A N T C O N TI N U La loi de LAPLACE Un conducteur traversé par un courant et placé dans un champ magnétique est soumis à une force dont le sens est déterminée par la règle des
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Roulements à une rangée de billes de génération C. Information Technique Produit
 Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
VMT Mod : Ventilation modulée pour le tertiaire
 Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE
 ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca
ÉTUDE DE L EFFICACITÉ DE GÉOGRILLES POUR PRÉVENIR L EFFONDREMENT LOCAL D UNE CHAUSSÉE ANALYSIS OF THE EFFICIENCY OF GEOGRIDS TO PREVENT A LOCAL COLLAPSE OF A ROAD Céline BOURDEAU et Daniel BILLAUX Itasca