Outils dédiés à la commande d axes et à la robotique. ni.com/fr
|
|
|
- Géraldine Chevalier
- il y a 9 ans
- Total affichages :
Transcription
1 Outils dédiés à la commande d axes et à la robotique


2 NI LabVIEW pour une grande variété de robots Acquisition de données Vision industrielle Bras robotisés Robotics Bibliothèques pour robots DENSO Module LabVIEW LEGO MINDSTORMS NXT FIRST Robotics LabVIEW Robotics
3 LabVIEW Robotics Connexion directe aux capteurs et actionneurs des plus grands fabricants Déploiement sur des cibles temps réel et FPGA Bibliothèques d acquisition et d analyse d images Communication réseau à travers l Ethernet ou d autres protocoles industriels Algorithme de détection et d évitement d obstacles Algorithmes de contrôle et de cinématique
4 Exemples de robots développés avec LabVIEW Robots thérapeutiques Véhicules de transport Inspection de ponts (MIT) Robots explorateurs Véhicules autonomes Humanoïdes
5 Aperçu d un système de robotique Acquisition Filtrage Perception Mesurer Analyser Navigation Localisation Prise de décisions Déplacements Cinématique Contrôle moteur Agir


6 Architecture des applications LabVIEW Robotics NI CompactRIO


7 Starter Kit LabVIEW Robotics Livré prêt à utiliser Idéal pour l enseignement et le prototypage Une NI Single-Board RIO, des moteurs avec encodeurs et un capteur ultrasonore rotatif inclus Possibilité d ajouter des capteurs, des actionneurs pour ajouter des fonctionnalités

8 Composantes d un système Motion Module NI SoftMotion Application Interface Moteur SoftMotion Extension Matériel

9 100Hz - 1 khz Télésurveill ance Interface Fonctions haut-niveau Déplacement Rapport de réduction Comparaison de positions Capture de positions Moteur SoftMotion Générateur de trajectoires Extension Commandes bas-niveau Consigne Retour encodeur Limites Gestion des interfaces de puissance
10 Télésurveillance Atteinte des limites Détection d erreurs Rapport de réduction virtuel Gestion de déplacements coordonnées Prise de références
11 Générateur de trajectoires Types de déplacements Linéaire Circulaire Arbitraire 3ème order (S-curve) Précis Rapide Flexible P V A J
12 Composantes d un système Motion NI SoftMotion Module Application Interface Moteur SoftMotion Extension Matériel

13 10 Hz 1kHz Plannification de chemin IHM Application Interface Enregistrement Gestion des évènements Fonctions haut-niveau Déplacement Rapport de réduction Comparaison de positions Capture de positions
14 10 Hz 1kHz Planification de chemin IHM Enregistrement Application Gestion des évènements Blocs de fontions Interface Fonctions haut-niveau Déplacement Rapport de réduction Comparaison de positions Capture de positions
15 Blocs de fonctions

16 Hz Plannification de chemin IHM Application Inter Blocs de fontions face Enregistrement Gestion des évènements Fonctions haut-niveau Déplacement Rapport de réduction Comparaison de positions Capture de positions
17 Hz Plannification de chemin IHM Application Inter Noeuds de Blocs de propriétés et de fonctions méthodes face Enregistrement Gestion des évènements Fonctions haut-niveau intermédiaires Déplacement Démarrer le mouvement Rapport Définir la de position réduction Comparaison Définir la vitesse de positions Obtenir la position Capture Etc. de positions


18 Noeuds de propriétés et de méthodes


19 Noeuds de propriétés et de méthodes
20 Interface Mémoire partagée Exécution du mouvement Application Interface Position souhaitée Vitesse maximum Position courante Moteur SoftMotion Etat du mouvement
21 Interface Mémoire partagée Réduit le jitter Introduit de la latence Communication flexible Avec les blocs de fonctions Asynchrone, non-bloquant PLCOpen Avec les VI Express Synchrone, bloquant Flux de données
22 Composantes d un système Motion NI SoftMotion Module Application Interface Moteur SoftMotion Extension Matériel
23 Extension Mémoire partagée Position souhaitée Moteur SoftMotion Interface activée Retour encodeur Etat des limites Extension Matériel Etat de l interface
24 20 khz 40 Mhz Boucle de position Commande vectorielle Extension Commandes bas-niveau Consigne Retour encodeur Limites Gestion des interfaces de puissance Boucle de vitesse Boucle de couple Matériel PWM E/S Lien vers le moteur Signaux d E/S Phases A, B, C Encodeur A, B, Z Etc.
25 20 khz 40 Mhz Boucle de position Commande vectorielle Extension Commandes bas-niveau Consigne Retour encodeur Limites Gestion des interfaces de puissance Conversion des données Boucle de vitesse Boucle de couple Matériel PWM E/S Lien vers le moteur Signaux d E/S Phases A, B, C Encodeur A, B, Z
26 20 khz 40 Mhz Boucle de position Commande vectorielle Exte Conversion crio-9512 des données nsion Boucle de vitesse Matériel E/S NI 9512 Drive Interface Boucle Module de couple P70360 Stepper Drive PWM
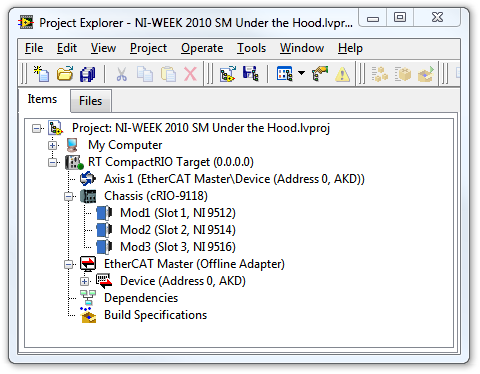
27 Exte AKD crio-9512 EtherCAT nsion NI AKD 9512 Drive EtherCAT Interface Drive Module P70360 Stepper Drive
28 Exte AKD SolidWorks EtherCAT nsion Simulation AKD avec EtherCAT Drive SolidWorks
29 20 khz 40 Mhz Boucle de postion Commande vectorielle Exte Data SolidWorks Translation nsion Boucle de vitesse Matériel E/S Simulation avec SolidWorks Boucle de couple PWM
30 Composantes d un système Motion Module NI SoftMotion Application Interface Moteur SoftMotion Extension Matériel
31 Avec une cible temps réel (Scan Mode) Application crio-9024 Application Moteur SoftMotion Interface NI 9512 Boucle de position Boucle de vitesse E/S Moteur SoftMotion Extension P70360 Drive Boucle de couple PWM Matériel Moteur pas à pas
32 Avec une cible temps réel (Scan Mode) crio-9024 Application Moteur SoftMotion NI 9512 Boucle de position Boucle de vitesse E/S P70360 AKD Drive Boucle Interface de EtherCAT couple PWM Boucle de poistion FOC Boucle de vitesse Boucle de couple E/S FOC Moteur AKM pas à pas Servo moteur
33 Avec une cible temps réel crio-9024 PXIe-8133 RT Application Moteur SoftMotion AKD Interface EtherCAT Boucle de poistion Boucle de vitesse Boucle de couple E/S FOC AKM Servo moteur




34 Avec une cible temps réel PXIe-8133 NI 3110RT RT Application Moteur SoftMotion AKD Interface EtherCAT Boucle de poistion Boucle de vitesse Boucle de couple E/S FOC AKM Servo moteur

35 Avec un PC fixe Application PC Windows Application Interface crio-9148 Moteur SoftMotion Pas de programmation RT Moteur SoftMotion Extension NI 9512 Boucle de position Boucle de vitesse E/S Matériel P70360 Drive Boucle de courant PWM


36 Avec un PC fixe et une cible temps réel PC Windows Application crio-9148 crio-9074 Application Moteur SoftMotion Pas Moteur de SoftMotion programmation RT NI 9512 Boucle de position Boucle de vitesse E/S P70360 Drive Boucle de courant PWM


37 Avec une IHM et une cible temps réel Windows Panel PC PC Application User Code crio-9074 Application Moteur SoftMotion NI 9512 Boucle de position Boucle de vitesse E/S P70360 Drive Boucle de courant PWM


38 LabVIEW Real-Time + FPGA Application crio-9024 Application Moteur SoftMotion Interface crio-9113 Boucle de position boucle de vitesse Boucle de courant PWM Moteur SoftMotion Extension NI 9505 E/S Commande vectorielle Matériel Servo Moteur
39 Avec des cibles temps réel et FPGA crio-9024 Applicatio Moteur SoftMotion crio-9113 Boucle de position Boucle de vitesse Boucle de courant PWM NI E/S Commande vectorielle Moteur Servo pas Moteur à pas


40 Avec des cibles temps réel et FPGA crio-9024 Application Moteur SoftMotion crio-9113 Single-Board RIO Boucle Boucle de position de position Boucle Boucle de vitesse de vitesse boucle Boucle de courant de courant PWM PWM NI 9501 E/S Moteur pas à pas
41 Simulation sur PC avec LabVIEW Application PC Windows Application Moteur SoftMotion Moteur Interface Simulation SoftMotion SolidWorks Matériel Simulation sur Windows Extension Simulation Matériel du matériel
42 Démonstration
43 Questions
44 Ressources disponibles ni.com/motion/f/ Guide de développement de machines mécatroniques Guide du développeur CompactRIO
Quoi de neuf en contrôle/commande et systèmes embarqués (RIO, WSN...)?
?") Quoi de neuf en contrôle/commande et systèmes embarqués (RIO, WSN...)? Mathieu PACE National Instruments, Ingénieur d applications L architecture RIO se développe Processeur FPGA E/S E/S E/S personnalisées
Quoi de neuf en contrôle/commande et systèmes embarqués (RIO, WSN...)? Mathieu PACE National Instruments, Ingénieur d applications L architecture RIO se développe Processeur FPGA E/S E/S E/S personnalisées
Création d une application Android (APPInventor)
") 1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
1. Matériel et logiciel Vous pouvez avec le logiciel App Inventor créer très facilement une application pour votre téléphone sous «Android». Vous devez pour cela : 1. Créer un compte Gmail sous Google
Robot humanoïde NAO Système d étude de la robotique mobile
 Descriptif du support technologique Robot humanoïde NAO Système d étude de la robotique mobile NAO est un robot humanoïde de 58cm conçu par Aldebaran Robotics, une entreprise parisienne à la pointe de
Descriptif du support technologique Robot humanoïde NAO Système d étude de la robotique mobile NAO est un robot humanoïde de 58cm conçu par Aldebaran Robotics, une entreprise parisienne à la pointe de
Les solutions National Instruments pour le Model In-The-Loop (MIL) et le prototypage rapide (RCP)
 et le prototypage rapide (RCP)") Les solutions National Instruments pour le Model In-The-Loop (MIL) et le prototypage rapide (RCP) Karine Rouelle Business Development Manager Real-Time Testing Au programme Mise en œuvre du Model-In-the-Loop
Les solutions National Instruments pour le Model In-The-Loop (MIL) et le prototypage rapide (RCP) Karine Rouelle Business Development Manager Real-Time Testing Au programme Mise en œuvre du Model-In-the-Loop
11 Février 2014 Paris nidays.fr
 11 Février 2014 Paris nidays.fr Télésurveillance des postes d alimentation de la ligne RER A Yohann LEDIEU Département «Systèmes de Conduite et d Essais» NEXEYA SYSTEMS La Couronne (16) Sommaire NEXEYA
11 Février 2014 Paris nidays.fr Télésurveillance des postes d alimentation de la ligne RER A Yohann LEDIEU Département «Systèmes de Conduite et d Essais» NEXEYA SYSTEMS La Couronne (16) Sommaire NEXEYA
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Limitations of the Playstation 3 for High Performance Cluster Computing
 Introduction Plan Limitations of the Playstation 3 for High Performance Cluster Computing July 2007 Introduction Plan Introduction Intérêts de la PS3 : rapide et puissante bon marché L utiliser pour faire
Introduction Plan Limitations of the Playstation 3 for High Performance Cluster Computing July 2007 Introduction Plan Introduction Intérêts de la PS3 : rapide et puissante bon marché L utiliser pour faire
ALTIUM DESIGNER. Solution unifiée de développement de produits électroniques, intégrée avec la mécanique
 Design Industriel et intégration de l électronique Toulouse 4 Mars 2009 ALTIUM DESIGNER Solution unifiée de développement de produits électroniques, intégrée avec la mécanique Christian Tichet Account
Design Industriel et intégration de l électronique Toulouse 4 Mars 2009 ALTIUM DESIGNER Solution unifiée de développement de produits électroniques, intégrée avec la mécanique Christian Tichet Account
Diagrammes de Package, de déploiement et de composants UML
 labsticc.univ-brest.fr/pages_perso/babau/ Diagrammes de Package, de déploiement et de composants UML Jean-Philippe Babau Département Informatique, UFR Sciences, Laboratoire Lab-STICC 2 1 Plan Description
labsticc.univ-brest.fr/pages_perso/babau/ Diagrammes de Package, de déploiement et de composants UML Jean-Philippe Babau Département Informatique, UFR Sciences, Laboratoire Lab-STICC 2 1 Plan Description
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Etude et développement logiciel Exemples de réalisation
 Etude et développement logiciel Exemples de réalisation SiègeSocial - 24, rue Gustave Madiot - Z.A. Les Bordes - 91070 BONDOUFLE - Tél: 01 69 11 51 00 E-mail: [email protected] - Web site: www.6ta.fr Date de
Etude et développement logiciel Exemples de réalisation SiègeSocial - 24, rue Gustave Madiot - Z.A. Les Bordes - 91070 BONDOUFLE - Tél: 01 69 11 51 00 E-mail: [email protected] - Web site: www.6ta.fr Date de
Cours n 12. Technologies WAN 2nd partie
 Cours n 12 Technologies WAN 2nd partie 1 Sommaire Aperçu des technologies WAN Technologies WAN Conception d un WAN 2 Lignes Louées Lorsque des connexions dédiées permanentes sont nécessaires, des lignes
Cours n 12 Technologies WAN 2nd partie 1 Sommaire Aperçu des technologies WAN Technologies WAN Conception d un WAN 2 Lignes Louées Lorsque des connexions dédiées permanentes sont nécessaires, des lignes
11 Février 2014 Paris nidays.fr. france.ni.com
 11 Février 2014 Paris nidays.fr Construire l enregistreur de données autonome de demain Marc-Junior LARROUY, Ingénieur d Applications, National Instruments France Contenu Introduction à l enregistrement
11 Février 2014 Paris nidays.fr Construire l enregistreur de données autonome de demain Marc-Junior LARROUY, Ingénieur d Applications, National Instruments France Contenu Introduction à l enregistrement
JOG : une approche haut niveau des systèmes embarqués via Armadeus et Java
 JOG : une approche haut niveau des systèmes embarqués via Armadeus et Java Resumé Olivier Reynet 1, Jean-Christophe Le Lann 1, Benoît Clément 1 1 ENSIETA, 2, rue François Verny, 29200 Brest - France olivier.reynet@[email protected]
JOG : une approche haut niveau des systèmes embarqués via Armadeus et Java Resumé Olivier Reynet 1, Jean-Christophe Le Lann 1, Benoît Clément 1 1 ENSIETA, 2, rue François Verny, 29200 Brest - France olivier.reynet@[email protected]
Servodrives et solutions motion centric, le futur de l automation!
 Club Automation Servodrives et solutions motion centric, le futur de l automation! Laurent Maillot Schneider Electric France Fonction :Responsable marketing motion control et robotique Servodrives:Technologie/avantages
Club Automation Servodrives et solutions motion centric, le futur de l automation! Laurent Maillot Schneider Electric France Fonction :Responsable marketing motion control et robotique Servodrives:Technologie/avantages
NXT Guide de mise en route. Rob Widger
 NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
Surveiller et contrôler vos applications à travers le Web
 Surveiller et contrôler vos applications à travers le Web Valérie HELLEQUIN Ingénieur d application Internet permet aujourd hui la diffusion d informations et de ressources que chaque utilisateur peut
Surveiller et contrôler vos applications à travers le Web Valérie HELLEQUIN Ingénieur d application Internet permet aujourd hui la diffusion d informations et de ressources que chaque utilisateur peut
Logiciel EV3 LEGO MINDSTORMS Education
 Robot éducateur : LEGO Education a le plaisir de vous présenter Robot éducateur, une sélection d'activités pédagogiques vous permettant de prendre en main votre EV3 LEGO MINDSTORMS Education de façon structurée
Robot éducateur : LEGO Education a le plaisir de vous présenter Robot éducateur, une sélection d'activités pédagogiques vous permettant de prendre en main votre EV3 LEGO MINDSTORMS Education de façon structurée
ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab
 ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab notre compétence d'éditeur à votre service créée en juin 2010, Scilab enterprises propose services et support autour
ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab notre compétence d'éditeur à votre service créée en juin 2010, Scilab enterprises propose services et support autour
Démarreur-testeur par ordinateur via le port USB d un PC pour moteurs asynchrones triphasés
 Démarreur-testeur par ordinateur via le port USB d un PC pour moteurs asynchrones triphasés J. MBIHI Email : [email protected] E. AMIE EBANDA et A. DONWOUNG KANA Groupe de Recherche en Informatique Industrielle
Démarreur-testeur par ordinateur via le port USB d un PC pour moteurs asynchrones triphasés J. MBIHI Email : [email protected] E. AMIE EBANDA et A. DONWOUNG KANA Groupe de Recherche en Informatique Industrielle
Université de La Rochelle. Réseaux TD n 6
 Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Réseaux TD n 6 Rappels : Théorème de Nyquist (ligne non bruitée) : Dmax = 2H log 2 V Théorème de Shannon (ligne bruitée) : C = H log 2 (1+ S/B) Relation entre débit binaire et rapidité de modulation :
Manuel de l utilisateur NXT 2.0
 Manuel de l utilisateur NXT 2.0 Introduction BIENVENUE DANS L UNIVERS DE LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education représente la nouvelle génération de robotique éducative, qui permet aux élèves
Manuel de l utilisateur NXT 2.0 Introduction BIENVENUE DANS L UNIVERS DE LEGO MINDSTORMS EDUCATION LEGO MINDSTORMS Education représente la nouvelle génération de robotique éducative, qui permet aux élèves
EL70x1 en mode position. Mise en œuvre rapide. VERSION : Beta / DATE : 31 Juillet 2011
 - EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
- EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
DES SAUVEGARDES ET DES RESTAURATIONS DE DONNEES SANS CONTRAINTES DE LIEU NI DE TEMPS
 POURQUOI CHOISIR ACRONIS BACKUP TO CLOUD? Les volumes de données que votre entreprise doit gérer et les coûts correspondants de sauvegarde et de maintenance augmentent de manière exponentielle. La virtualisation,
POURQUOI CHOISIR ACRONIS BACKUP TO CLOUD? Les volumes de données que votre entreprise doit gérer et les coûts correspondants de sauvegarde et de maintenance augmentent de manière exponentielle. La virtualisation,
Introduction à la robotique Licence 1ère année - 2011/2012
 Introduction à la robotique Licence 1ère année - 2011/2012 Laëtitia Matignon GREYC-CNRS Université de Caen, France Laetitia Matignon Université de Caen 1 / 61 Plan Définitions 1 Définitions 2 3 Robots
Introduction à la robotique Licence 1ère année - 2011/2012 Laëtitia Matignon GREYC-CNRS Université de Caen, France Laetitia Matignon Université de Caen 1 / 61 Plan Définitions 1 Définitions 2 3 Robots
PREREQUIS TECHNIQUES. Yourcegid Etafi Start
 PREREQUIS TECHNIQUES Yourcegid Etafi Start PRT-YC Etafi Start-14/2014 Prérequis Techniques Yourcegid Etafi Start 1. PREAMBULE... 3 2. PREREQUIS RESEAU... 4 Introduction... 4 Accès à la solution... 4 3.
PREREQUIS TECHNIQUES Yourcegid Etafi Start PRT-YC Etafi Start-14/2014 Prérequis Techniques Yourcegid Etafi Start 1. PREAMBULE... 3 2. PREREQUIS RESEAU... 4 Introduction... 4 Accès à la solution... 4 3.
Virtua Robot de Gravage
 Virtua Virtua Vue d ensemble Virtua est le périphérique idéal et facile à utiliser pour la distribution des images à partir de n'importe quelle modalité. Le design du Virtua inclut un microprocesseur embarqué
Virtua Virtua Vue d ensemble Virtua est le périphérique idéal et facile à utiliser pour la distribution des images à partir de n'importe quelle modalité. Le design du Virtua inclut un microprocesseur embarqué
SAFETY ON BOARD. elearning
 Formations Bosch Rexroth 2014 entraînements électriques, Hydraulique, Pneumatique, d assemblage,, Mécatronique, Lean - Ergonomie, Nouveau SAFETY ON BOARD Nouveau 2 Formations Bosch Rexroth 2014 Introduction
Formations Bosch Rexroth 2014 entraînements électriques, Hydraulique, Pneumatique, d assemblage,, Mécatronique, Lean - Ergonomie, Nouveau SAFETY ON BOARD Nouveau 2 Formations Bosch Rexroth 2014 Introduction
F210. Automate de vision hautes fonctionnalités. Caractèristiques. Algorithmes vectoriels
 Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Mise en œuvre de TP avec la plate-forme d enseignement NI ELVIS)
") Mise en œuvre de TP avec la plate-forme d enseignement NI ELVIS) Frédéric BOULLOT Ingénieur Commercial pour l Enseignement et la Recherche [email protected] 06 74 89 98 55 1 Sommaire Tendances dans
Mise en œuvre de TP avec la plate-forme d enseignement NI ELVIS) Frédéric BOULLOT Ingénieur Commercial pour l Enseignement et la Recherche [email protected] 06 74 89 98 55 1 Sommaire Tendances dans
Programme des formations Gamme automates
 Programme des formations Gamme automates MODULO 2 MOD2.1 MOD2.2 MOD2.3 MODULO 5 MOD5.1 MOD5.2 MOD5.3 MODUWEB VISION MOW.1 MOW.2 Automates EY-MODULO 2 Généralités MOD2.1 Objectifs Connaître la constitution
Programme des formations Gamme automates MODULO 2 MOD2.1 MOD2.2 MOD2.3 MODULO 5 MOD5.1 MOD5.2 MOD5.3 MODUWEB VISION MOW.1 MOW.2 Automates EY-MODULO 2 Généralités MOD2.1 Objectifs Connaître la constitution
Java c est quoi? Java. Java. Java : Principe de fonctionnement 31/01/2012. 1 - Vue générale 2 - Mon premier programme 3 - Types de Programme Java
 1 - Vue générale 2 - Mon premier programme 3 - Types de Programme 1 2 c est quoi? Technologie développée par SUN Microsystems lancée en 1995 Dans un des premiers papiers* sur le langage JAVA, SUN le décrit
1 - Vue générale 2 - Mon premier programme 3 - Types de Programme 1 2 c est quoi? Technologie développée par SUN Microsystems lancée en 1995 Dans un des premiers papiers* sur le langage JAVA, SUN le décrit
SoMachine. Solution logicielle pour votre architecture Machine Atelier de découverte. SoMachine
 Solution logicielle pour votre architecture Machine Atelier de découverte SoMachine Objectif de la manipulation Le programme à réaliser va permettre de gérer le remplissage et la vidange d une cuve en
Solution logicielle pour votre architecture Machine Atelier de découverte SoMachine Objectif de la manipulation Le programme à réaliser va permettre de gérer le remplissage et la vidange d une cuve en
PROGRAMME DU CONCOURS DE RÉDACTEUR INFORMATICIEN
 PROGRAMME DU CONCOURS DE RÉDACTEUR INFORMATICIEN 1. DÉVELOPPEMENT D'APPLICATION (CONCEPTEUR ANALYSTE) 1.1 ARCHITECTURE MATÉRIELLE DU SYSTÈME INFORMATIQUE 1.1.1 Architecture d'un ordinateur Processeur,
PROGRAMME DU CONCOURS DE RÉDACTEUR INFORMATICIEN 1. DÉVELOPPEMENT D'APPLICATION (CONCEPTEUR ANALYSTE) 1.1 ARCHITECTURE MATÉRIELLE DU SYSTÈME INFORMATIQUE 1.1.1 Architecture d'un ordinateur Processeur,
Journée technique Innovation dans l Ameublement. CRITT Bois ----- Vendredi 25 septembre 2009
 Journée technique Innovation dans l Ameublement ----- CRITT Bois ----- Vendredi 25 septembre 2009 Impacts de la CFAO pour l industrie de l ameublement : Organisation et Méthodes de travail Sommaire 1 -
Journée technique Innovation dans l Ameublement ----- CRITT Bois ----- Vendredi 25 septembre 2009 Impacts de la CFAO pour l industrie de l ameublement : Organisation et Méthodes de travail Sommaire 1 -
Installation du transfert de fichier sécurisé sur le serveur orphanet
 Installation du transfert de fichier sécurisé sur le serveur orphanet But du changement de mode de transfert Afin de sécuriser les transferts de données sur la machine orphanet (orphanet.infobiogen.fr),
Installation du transfert de fichier sécurisé sur le serveur orphanet But du changement de mode de transfert Afin de sécuriser les transferts de données sur la machine orphanet (orphanet.infobiogen.fr),
Triphasé 400 V 0.4-630 kw. Variateur multifonction haute performance
 Triphasé 400 V 0.4-630 kw Variateur multifonction haute performance Des performances à la pointe de l industrie The performance reaching the peak in the industry En rassemblant le meilleur de ces technologies,
Triphasé 400 V 0.4-630 kw Variateur multifonction haute performance Des performances à la pointe de l industrie The performance reaching the peak in the industry En rassemblant le meilleur de ces technologies,
 Prototypage facile Audio streaming Flyport et l internet des Objets opensource Robots android Compatible Lego Mindstrom Domotique I. Flyport et le monde de l IP II. Caractéristiques du module III. Flyport
Prototypage facile Audio streaming Flyport et l internet des Objets opensource Robots android Compatible Lego Mindstrom Domotique I. Flyport et le monde de l IP II. Caractéristiques du module III. Flyport
Fiche produit FUJITSU ETERNUS DX200F Baie de stockage Flash
 Fiche produit FUJITSU ETERNUS DX200F Baie de stockage Flash Fiche produit FUJITSU ETERNUS DX200F Baie de stockage Flash Des performances haut de gamme à un prix avantageux ETERNUS DX : le stockage centré
Fiche produit FUJITSU ETERNUS DX200F Baie de stockage Flash Fiche produit FUJITSU ETERNUS DX200F Baie de stockage Flash Des performances haut de gamme à un prix avantageux ETERNUS DX : le stockage centré
Connexion à distance. Pour configurer les automates Beckhoff via un PC de programmation VERSION : 1.0 / PH
 Connexion à distance Pour configurer les automates Beckhoff via un PC de programmation VERSION : 1.0 / PH Certains CPU permettent d installer les logiciels d ingénierie TwinCAT pour ainsi travailler en
Connexion à distance Pour configurer les automates Beckhoff via un PC de programmation VERSION : 1.0 / PH Certains CPU permettent d installer les logiciels d ingénierie TwinCAT pour ainsi travailler en
Procédure et Pré-requis
 Installation Périclès5 Laforêt Procédure et Pré-requis Périclès5 sept 2014 POLIRIS 65 rue Ordener 75880 Paris 18 tél : 01 56 41 31 00 - fax : 01 56 41 31 10 - [email protected] - www.poliris.fr Sommaire
Installation Périclès5 Laforêt Procédure et Pré-requis Périclès5 sept 2014 POLIRIS 65 rue Ordener 75880 Paris 18 tél : 01 56 41 31 00 - fax : 01 56 41 31 10 - [email protected] - www.poliris.fr Sommaire
Solutions de Cybersécurité Industrielle
 Solutions de Cybersécurité Industrielle Automation Informatique Industrielle M2M www.factorysystemes.fr Notre mission «Mettre au profit de nos clients des secteurs de l industrie, du transport et des infrastructures
Solutions de Cybersécurité Industrielle Automation Informatique Industrielle M2M www.factorysystemes.fr Notre mission «Mettre au profit de nos clients des secteurs de l industrie, du transport et des infrastructures
PROGRAMME DETAILLE. Parcours en première année en apprentissage. Travail personnel. 4 24 12 24 CC + ET réseaux
 PROGRAMME DETAILLE du Master IRS Parcours en première année en apprentissage Unités d Enseignement (UE) 1 er semestre ECTS Charge de travail de l'étudiant Travail personnel Modalités de contrôle des connaissances
PROGRAMME DETAILLE du Master IRS Parcours en première année en apprentissage Unités d Enseignement (UE) 1 er semestre ECTS Charge de travail de l'étudiant Travail personnel Modalités de contrôle des connaissances
Efficace et ciblée : La surveillance des signaux de télévision numérique (2)
") Efficace et ciblée : La surveillance des signaux de télévision numérique (2) La première partie de cet article publié dans le numéro 192 décrit la méthode utilisée pour déterminer les points de surveillance
Efficace et ciblée : La surveillance des signaux de télévision numérique (2) La première partie de cet article publié dans le numéro 192 décrit la méthode utilisée pour déterminer les points de surveillance
PRESENTATION RESSOURCES. Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille
 PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
PRESENTATION RESSOURCES Christian Dupaty BTS Systèmes Numériques Lycée Fourcade Gardanne Académie d Aix Marseille 1) Introduction, Objectifs et Intentions Le BTS SN (Systèmes Numériques) intègre la formation
Initiation au HPC - Généralités
 Initiation au HPC - Généralités Éric Ramat et Julien Dehos Université du Littoral Côte d Opale M2 Informatique 2 septembre 2015 Éric Ramat et Julien Dehos Initiation au HPC - Généralités 1/49 Plan du cours
Initiation au HPC - Généralités Éric Ramat et Julien Dehos Université du Littoral Côte d Opale M2 Informatique 2 septembre 2015 Éric Ramat et Julien Dehos Initiation au HPC - Généralités 1/49 Plan du cours
Cadre COMMENT TIRER BENEFICE DES SYSTEMES ROBOTISES. Yash Khandhia, Wilfrid Baroche, Dominique Humblot - AC&E
 COMMENT TIRER BENEFICE DES SYSTEMES ROBOTISES Yash Khandhia, Wilfrid Baroche, Dominique Humblot - AC&E Résumé Abstract Cet article présente une approche nouvelle et innovante de simulation et de programmation
COMMENT TIRER BENEFICE DES SYSTEMES ROBOTISES Yash Khandhia, Wilfrid Baroche, Dominique Humblot - AC&E Résumé Abstract Cet article présente une approche nouvelle et innovante de simulation et de programmation
Détection des deux roues motorisés par télémétrie laser à balayage
 MEsure du TRAfic des deux-roues MOTOrisés pour la sécurité et l évaluation des risques Détection des deux roues motorisés par télémétrie laser à balayage Séminaire de mi parcours 11 mai 2012 CETE Normandie
MEsure du TRAfic des deux-roues MOTOrisés pour la sécurité et l évaluation des risques Détection des deux roues motorisés par télémétrie laser à balayage Séminaire de mi parcours 11 mai 2012 CETE Normandie
Contributions à l expérimentation sur les systèmes distribués de grande taille
 Contributions à l expérimentation sur les systèmes distribués de grande taille Lucas Nussbaum Soutenance de thèse 4 décembre 2008 Lucas Nussbaum Expérimentation sur les systèmes distribués 1 / 49 Contexte
Contributions à l expérimentation sur les systèmes distribués de grande taille Lucas Nussbaum Soutenance de thèse 4 décembre 2008 Lucas Nussbaum Expérimentation sur les systèmes distribués 1 / 49 Contexte
Téléphone IP. Téléphone IP aux nombreuses fonctions avancées pour une utilisation professionnelle et au prix abordable FICHE PRODUIT
 Téléphone IP Téléphone IP aux nombreuses fonctions avancées pour une utilisation professionnelle et au prix abordable FICHE PRODUIT Téléphone IP professionnel toutes fonctionnalités à 1 ligne qui prend
Téléphone IP Téléphone IP aux nombreuses fonctions avancées pour une utilisation professionnelle et au prix abordable FICHE PRODUIT Téléphone IP professionnel toutes fonctionnalités à 1 ligne qui prend
IV - Programme détaillé par matière (1 fiche détaillée par matière)
") IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
IV - Programme détaillé par matière (1 fiche détaillée par matière) Matière : Asservissement numérique Introduction aux systèmes échantillonnés (signal échantillonné, échantillonnage idéal, transformation
Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com
 Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com La Suite LOGIX La Suite LOGIX est un ensemble de produits pour le calcul et l optimisation complète des
Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com La Suite LOGIX La Suite LOGIX est un ensemble de produits pour le calcul et l optimisation complète des
Communications performantes par passage de message entre machines virtuelles co-hébergées
 Communications performantes par passage de message entre machines virtuelles co-hébergées François Diakhaté1,2 1 CEA/DAM Île de France 2 INRIA Bordeaux Sud Ouest, équipe RUNTIME Renpar 2009 1 Plan Introduction
Communications performantes par passage de message entre machines virtuelles co-hébergées François Diakhaté1,2 1 CEA/DAM Île de France 2 INRIA Bordeaux Sud Ouest, équipe RUNTIME Renpar 2009 1 Plan Introduction
FLEXIBILITE CONTINUITE LIAISON PAR INTERNET SOLUTIONS STANDARD
 RITOP Le système de conduite de processus pour le service des eaux et de l énergie COMPATIBILITE FLEXIBILITE CONTINUITE LIAISON PAR INTERNET SOLUTIONS STANDARD Aperçu Solutions sur mesure pour aujourd
RITOP Le système de conduite de processus pour le service des eaux et de l énergie COMPATIBILITE FLEXIBILITE CONTINUITE LIAISON PAR INTERNET SOLUTIONS STANDARD Aperçu Solutions sur mesure pour aujourd
LOGICIEL DE GESTION D ENTREPOT
 FR LOGICIEL DE GESTION D ENTREPOT Modula WMS Avantages découlant de l utilisation de Modula WMS OPTIMISATION Gestion statique ou dynamique des emplacements pour éviter d inutiles redondances. GAIN DE TEMPS
FR LOGICIEL DE GESTION D ENTREPOT Modula WMS Avantages découlant de l utilisation de Modula WMS OPTIMISATION Gestion statique ou dynamique des emplacements pour éviter d inutiles redondances. GAIN DE TEMPS
Microsoft Dynamics AX. Solutions flexibles avec la technologie Microsoft Dynamics AX Application Object Server
 FLEXIBILITÉ Microsoft Dynamics AX Solutions flexibles avec la technologie Microsoft Dynamics AX Application Object Server Livre blanc Comment les entreprises peuvent-elles utiliser la technologie Microsoft
FLEXIBILITÉ Microsoft Dynamics AX Solutions flexibles avec la technologie Microsoft Dynamics AX Application Object Server Livre blanc Comment les entreprises peuvent-elles utiliser la technologie Microsoft
Quoi de neuf en LabVIEW FPGA 2010?
 Quoi de neuf en LabVIEW FPGA 2010? Yannick DEGLA Ingénieur d Application Fonctionnalités de LabVIEW FPGA 2010 Nœud d intégration d IP - Importer directement des fichiers.xco de Xilinx ou vos propres VHDL
Quoi de neuf en LabVIEW FPGA 2010? Yannick DEGLA Ingénieur d Application Fonctionnalités de LabVIEW FPGA 2010 Nœud d intégration d IP - Importer directement des fichiers.xco de Xilinx ou vos propres VHDL
FAMILLE EMC RECOVERPOINT
 FAMILLE EMC RECOVERPOINT Solution économique de protection des données et de reprise après sinistre en local et à distance Avantages clés Optimiser la protection des données et la reprise après sinistre
FAMILLE EMC RECOVERPOINT Solution économique de protection des données et de reprise après sinistre en local et à distance Avantages clés Optimiser la protection des données et la reprise après sinistre
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm)
") Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 - Evénements et architectures - Spécifications de performances
Eléments de spécification des systèmes temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 - Evénements et architectures - Spécifications de performances
Le Programme SYGADE SYGADE 5.2. Besoins en équipement, logiciels et formation. UNCTAD/GID/DMFAS/Misc.6/Rev.7
 CONFÉRENCE DES NATIONS UNIES SUR LE COMMERCE ET LE DÉVELOPPEMENT UNITED NATIONS CONFERENCE ON TRADE AND DEVELOPMENT Le Programme SYGADE SYGADE 5.2 Besoins en équipement, logiciels et formation UNCTAD/GID/DMFAS/Misc.6/Rev.7
CONFÉRENCE DES NATIONS UNIES SUR LE COMMERCE ET LE DÉVELOPPEMENT UNITED NATIONS CONFERENCE ON TRADE AND DEVELOPMENT Le Programme SYGADE SYGADE 5.2 Besoins en équipement, logiciels et formation UNCTAD/GID/DMFAS/Misc.6/Rev.7
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
But de cette présentation
 Réseaux poste à poste ou égal à égal (peer to peer) sous Windows But de cette présentation Vous permettre de configurer un petit réseau domestique (ou de tpe), sans serveur dédié, sous Windows (c est prévu
Réseaux poste à poste ou égal à égal (peer to peer) sous Windows But de cette présentation Vous permettre de configurer un petit réseau domestique (ou de tpe), sans serveur dédié, sous Windows (c est prévu
CONTEC CO., LTD. Novembre 2010
 La gamme CONTEC CONTEC CO., LTD. Novembre 2010 1 Agenda Introduction Data acquisition and control Data Communication Expansion chassis and accessory Distributed I/O and media converter Stainless steel
La gamme CONTEC CONTEC CO., LTD. Novembre 2010 1 Agenda Introduction Data acquisition and control Data Communication Expansion chassis and accessory Distributed I/O and media converter Stainless steel
11 Février 2014 Paris nidays.fr. ni.com
 11 Février 2014 Paris nidays.fr 1 Choisir la bonne architecture logicielle pour automatiser les systèmes de test Jérémy Charavet Ingénieur d Applications, National Instruments France Une architecture logicielle
11 Février 2014 Paris nidays.fr 1 Choisir la bonne architecture logicielle pour automatiser les systèmes de test Jérémy Charavet Ingénieur d Applications, National Instruments France Une architecture logicielle
Temps Réel. Jérôme Pouiller <[email protected]> Septembre 2011
 Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Temps Réel Jérôme Pouiller Septembre 2011 Sommaire Problèmatique Le monotâche Le multitâches L ordonnanement Le partage de ressources Problèmatiques des OS temps réels J. Pouiller
Retour d expérience en Astrophysique : utilisation du Cloud IaaS pour le traitement de données des missions spatiales
 Retour d expérience en Astrophysique : utilisation du Cloud IaaS pour le traitement de données des missions spatiales Cécile Cavet cecile.cavet at apc.univ-paris7.fr Centre François Arago (FACe), Laboratoire
Retour d expérience en Astrophysique : utilisation du Cloud IaaS pour le traitement de données des missions spatiales Cécile Cavet cecile.cavet at apc.univ-paris7.fr Centre François Arago (FACe), Laboratoire
Prise en main rapide
 Objectif terminal Réaliser un objet communicant Pourquoi? : 20 millards d objets connectés en 2020! Quelques mots sur l outil de développement App Inventor App Inventor pour Android est une application
Objectif terminal Réaliser un objet communicant Pourquoi? : 20 millards d objets connectés en 2020! Quelques mots sur l outil de développement App Inventor App Inventor pour Android est une application
Gestion Electronique d'informations et de Documents pour l'entreprise
 Gestion Electronique d'informations et de Documents pour l'entreprise DocuWare en quelques mots Une remarquable success story 24 ans d existence Plus de 10 000 clients 500 intégrateurs certifiés Utilisé
Gestion Electronique d'informations et de Documents pour l'entreprise DocuWare en quelques mots Une remarquable success story 24 ans d existence Plus de 10 000 clients 500 intégrateurs certifiés Utilisé
Parallélisme et Répartition
 Parallélisme et Répartition Master Info Françoise Baude Université de Nice Sophia-Antipolis UFR Sciences Département Informatique [email protected] web du cours : deptinfo.unice.fr/~baude Septembre 2009 Chapitre
Parallélisme et Répartition Master Info Françoise Baude Université de Nice Sophia-Antipolis UFR Sciences Département Informatique [email protected] web du cours : deptinfo.unice.fr/~baude Septembre 2009 Chapitre
Le serveur modulaire d alerte, de recherche de personnes et de communication
 Le serveur modulaire d alerte, de recherche de personnes et de communication www.swissphone.com I.SEARCH, aperçu général Recherche de personnes Meet-me Call-me Messagerie E-mail Liaison avec un système
Le serveur modulaire d alerte, de recherche de personnes et de communication www.swissphone.com I.SEARCH, aperçu général Recherche de personnes Meet-me Call-me Messagerie E-mail Liaison avec un système
Séquencer une application
 Séquencer une application Pour ma part, j'utilise Vmware workstation pour créer les packages. Je configure une VM sous Windows Xp Pro Sp2 : 1. Mise du Pc dans le domaine 2. Installation du séquenceur 3.
Séquencer une application Pour ma part, j'utilise Vmware workstation pour créer les packages. Je configure une VM sous Windows Xp Pro Sp2 : 1. Mise du Pc dans le domaine 2. Installation du séquenceur 3.
µrv : Realité Virtuelle
 µrv : Realité Virtuelle Edgar-Fernando ARRIAGA-GARCIA Charles-Henri BABIAUD Clément GRELLIER Quentin PETIT Jérôme Ricoeur Florent VIOLLEAU INSA Rennes 21 septembre 2011 1 / 15 Objectifs pour cette semaine
µrv : Realité Virtuelle Edgar-Fernando ARRIAGA-GARCIA Charles-Henri BABIAUD Clément GRELLIER Quentin PETIT Jérôme Ricoeur Florent VIOLLEAU INSA Rennes 21 septembre 2011 1 / 15 Objectifs pour cette semaine
Environnement Zebra Link-OS version 2.0
 Environnement Zebra Link-OS version 2.0 Pour répondre aux nouvelles attentes et à une hausse de la demande en appareils à la fois mobiles, intelligents et connectés au Cloud, Zebra Technologies a créé
Environnement Zebra Link-OS version 2.0 Pour répondre aux nouvelles attentes et à une hausse de la demande en appareils à la fois mobiles, intelligents et connectés au Cloud, Zebra Technologies a créé
LE RÉFRIGÉRATEUR PRÊT À INSTALLER
 LE RÉFRIGÉRATEUR PRÊT À INSTALLER sans aucune modification de la structure de votre paillasse! UNIMEDICAL LAB, est la solution professionnelle proposée par Unifrigor pour le laboratoire. Tables réfrigérées
LE RÉFRIGÉRATEUR PRÊT À INSTALLER sans aucune modification de la structure de votre paillasse! UNIMEDICAL LAB, est la solution professionnelle proposée par Unifrigor pour le laboratoire. Tables réfrigérées
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
Modules Multimédia PAO (Adobe)
") Modules Multimédia PAO (Adobe) Pré-requis : Bonne maîtrise de la manipulation d'un PC (environnement Windows ou Mac) et de la navigation Internet. Disposition pour le graphisme recommandée. Mémoire visuelle,
Modules Multimédia PAO (Adobe) Pré-requis : Bonne maîtrise de la manipulation d'un PC (environnement Windows ou Mac) et de la navigation Internet. Disposition pour le graphisme recommandée. Mémoire visuelle,
L étonnant flair du chien
 Fiche pédagogique Magazine Les Débrouillards Conception: Audrey Miller Septembre 2015 Titre : Des chiens au secours des animaux menacés Rubrique : Monde animal Pages : 19-22 Thème : Les chiens renifleurs
Fiche pédagogique Magazine Les Débrouillards Conception: Audrey Miller Septembre 2015 Titre : Des chiens au secours des animaux menacés Rubrique : Monde animal Pages : 19-22 Thème : Les chiens renifleurs
Environnement logiciel open source pour la création d œuvres artistiques interactives
 Environnement logiciel open source pour la création d œuvres artistiques interactives Stéphane Donikian IRISA/CNRS Campus de Beaulieu 35042, Rennes Cedex, France [email protected] La création artistique
Environnement logiciel open source pour la création d œuvres artistiques interactives Stéphane Donikian IRISA/CNRS Campus de Beaulieu 35042, Rennes Cedex, France [email protected] La création artistique
Solutions de gestion de la sécurité Livre blanc
 Solutions de gestion de la sécurité Livre blanc L intégration de la gestion des identités et des accès avec l authentification unique Objectif : Renforcer la politique de sécurité et améliorer la productivité
Solutions de gestion de la sécurité Livre blanc L intégration de la gestion des identités et des accès avec l authentification unique Objectif : Renforcer la politique de sécurité et améliorer la productivité
Prenez le PLM express
 BTS CIM (1) Prenez le PLM express BENOîT DONY [1] Les logiciels de PLM (Product Lifecycle Management) permettent la gestion des données techniques d un produit tout au long de son cycle de vie. Autrefois
BTS CIM (1) Prenez le PLM express BENOîT DONY [1] Les logiciels de PLM (Product Lifecycle Management) permettent la gestion des données techniques d un produit tout au long de son cycle de vie. Autrefois
Accès instantané aux mots et aux locutions Le dictionnaire électronique offre une traduction rapide d'un mot ou d'une locution
 @promt Office 8.0 Description abrégée Spécifiquement conçu pour la maison et les petites entreprises Traduction de documents, de courriers électroniques et de messages instantanés ICQ Traduction de pages
@promt Office 8.0 Description abrégée Spécifiquement conçu pour la maison et les petites entreprises Traduction de documents, de courriers électroniques et de messages instantanés ICQ Traduction de pages
Présentation Module logique Zelio Logic 0 Interface de communication
 c 1 2 3 4 5 6 7 8 9 1 + 0 # = Présentation Module logique Zelio Logic 0 Présentation L offre communication de la gamme Zelio Logic est principalement dédiée à la surveillance ou à la télécommande de machines
c 1 2 3 4 5 6 7 8 9 1 + 0 # = Présentation Module logique Zelio Logic 0 Présentation L offre communication de la gamme Zelio Logic est principalement dédiée à la surveillance ou à la télécommande de machines
Ordinateur portable Latitude E5410
 Ordinateur portable Latitude E5410 Dell Latitude E5410 Doté de fonctionnalités avancées pour gagner du temps et de l'argent, l'ordinateur portable Dell TM Latitude TM E5410 offre aux utilisateurs finaux
Ordinateur portable Latitude E5410 Dell Latitude E5410 Doté de fonctionnalités avancées pour gagner du temps et de l'argent, l'ordinateur portable Dell TM Latitude TM E5410 offre aux utilisateurs finaux
StruxureWare Power Monitoring v7.0. La nouvelle génération en matière de logiciel de gestion complète d énergie
 StruxureWare Power Monitoring v7.0 La nouvelle génération en matière de logiciel de gestion complète d énergie Évolution des deux plate-formes originales Power Monitoring v7.0 SMS ION Enterprise 2012 Struxureware
StruxureWare Power Monitoring v7.0 La nouvelle génération en matière de logiciel de gestion complète d énergie Évolution des deux plate-formes originales Power Monitoring v7.0 SMS ION Enterprise 2012 Struxureware
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Environnement Zebra Link-OS version 2.0
 Environnement Zebra Link-OS version 2.0 Pour répondre aux nouvelles attentes et à une demande croissante en appareils à la fois mobiles, intelligents et connectés au Cloud, Zebra Technologies a créé un
Environnement Zebra Link-OS version 2.0 Pour répondre aux nouvelles attentes et à une demande croissante en appareils à la fois mobiles, intelligents et connectés au Cloud, Zebra Technologies a créé un
AP 160LCD ONDULEUR RÉSEAUX LOCAUX (LAN) SERVEURS CENTRES DE TRAITEMENT DES DONNÉES
 SERVEURS CENTRES DE TRAITEMENT DES DONNÉES") ONDULEUR RÉSEAUX LOCAUX (LAN) SERVEURS CENTRES DE TRAITEMENT DES DONNÉES COMMERCE ÉLECTRONIQUE (ISP/ASP/POP) PC INDUSTRIELS DISPOSITIFS DE SECOURS (SIGNALISATIONS/ALARMES) DISPOSITIFS ÉLECTRO-MÉDICAUX
ONDULEUR RÉSEAUX LOCAUX (LAN) SERVEURS CENTRES DE TRAITEMENT DES DONNÉES COMMERCE ÉLECTRONIQUE (ISP/ASP/POP) PC INDUSTRIELS DISPOSITIFS DE SECOURS (SIGNALISATIONS/ALARMES) DISPOSITIFS ÉLECTRO-MÉDICAUX
Interface Homme-Machine. Philippe Gaussier Alexandre Pitti
 Interface Homme-Machine Philippe Gaussier Alexandre Pitti Plan du cours 1 Introduction à l'ihm, historique et ergonomie psychologie, handicap et théorie, méthodes de conception et d évaluation 2 Éléments
Interface Homme-Machine Philippe Gaussier Alexandre Pitti Plan du cours 1 Introduction à l'ihm, historique et ergonomie psychologie, handicap et théorie, méthodes de conception et d évaluation 2 Éléments
Rapports d évaluation professionnels
 Rapports d évaluation professionnels Extrayez des informations significatives de vos données immotiques archivées et prenez des décisions opérationnelles les plus appropriées en toute connaissance de cause
Rapports d évaluation professionnels Extrayez des informations significatives de vos données immotiques archivées et prenez des décisions opérationnelles les plus appropriées en toute connaissance de cause
Fiche Produit Announce
 Fiche Produit Announce Message d attente Filtrage d appels Serveur Vocal Interactif Statistiques d appels applications for Cisco Unified Communications Directory Solutions IPS Global Directory Web Directory
Fiche Produit Announce Message d attente Filtrage d appels Serveur Vocal Interactif Statistiques d appels applications for Cisco Unified Communications Directory Solutions IPS Global Directory Web Directory
TOPOLOGIES des RESEAUX D ADMINISTRATION
 1 TOPOLOGIES des RESEAUX D ADMINISTRATION Approches Variables selon le type et la taille de réseaux Réseau local d entreprise Réseau étendu Intranet Réseau hébergeur Réseau «public» (F.A.I., etc.) Poids
1 TOPOLOGIES des RESEAUX D ADMINISTRATION Approches Variables selon le type et la taille de réseaux Réseau local d entreprise Réseau étendu Intranet Réseau hébergeur Réseau «public» (F.A.I., etc.) Poids
Analyse de performance, monitoring
 Analyse de performance, monitoring Plan Principes de profilage Projet TPTP dans Eclipse Utilisation des profiling tools de TPTP Philippe Collet Master 1 Informatique 2009-2010 http://deptinfo.unice.fr/twiki/bin/view/minfo/gl
Analyse de performance, monitoring Plan Principes de profilage Projet TPTP dans Eclipse Utilisation des profiling tools de TPTP Philippe Collet Master 1 Informatique 2009-2010 http://deptinfo.unice.fr/twiki/bin/view/minfo/gl
Mesures de temps de propagation de groupe sur convertisseurs de fréquence sans accès aux OL
 Mesures de temps de propagation de groupe sur convertisseurs de fréquence sans accès aux Comment mesurer le temps de propagation de groupe sur des convertisseurs de fréquence dans lesquels le ou les oscillateurs
Mesures de temps de propagation de groupe sur convertisseurs de fréquence sans accès aux Comment mesurer le temps de propagation de groupe sur des convertisseurs de fréquence dans lesquels le ou les oscillateurs
PACK ADSL WIFI. Configurer ma connexion ADSL avec Modem/Routeur Sagem F@st 1400W
 PACK ADSL WIFI Configurer ma connexion ADSL avec Modem/Routeur Sagem F@st 1400W Installation du Pack Wi-Fi : Vous devez Installer votre clé Wi-Fi avant d installer votre modem/routeur a. Installation de
PACK ADSL WIFI Configurer ma connexion ADSL avec Modem/Routeur Sagem F@st 1400W Installation du Pack Wi-Fi : Vous devez Installer votre clé Wi-Fi avant d installer votre modem/routeur a. Installation de
Vérifier la qualité de vos applications logicielle de manière continue
 IBM Software Group Vérifier la qualité de vos applications logicielle de manière continue Arnaud Bouzy Kamel Moulaoui 2004 IBM Corporation Agenda Analyse de code Test Fonctionnel Test de Performance Questions
IBM Software Group Vérifier la qualité de vos applications logicielle de manière continue Arnaud Bouzy Kamel Moulaoui 2004 IBM Corporation Agenda Analyse de code Test Fonctionnel Test de Performance Questions
Better data. Better decisions. La carière digitale, nouvel outil de suivi et de gestion de l exploitation
 Better data. Better decisions. La carière digitale, nouvel outil de suivi et de gestion de l exploitation CIGO Juin 2015 Nous vivons dans un environnement digital De nombreux éléments personnels ou professionnels
Better data. Better decisions. La carière digitale, nouvel outil de suivi et de gestion de l exploitation CIGO Juin 2015 Nous vivons dans un environnement digital De nombreux éléments personnels ou professionnels