Contrôle des spécifications dimensionnelles et géométriques sur Machines à Mesurer Tridimensionnelles
|
|
|
- Ernest Larose
- il y a 10 ans
- Total affichages :
Transcription
1 Contrôle des spécifications dimensionnelles et géométriques sur Machines à Mesurer Tridimensionnelles 1

2 Inspection d une spécification portée sur un dessin Les étapes : Définir selon la norme (ISO) la spécification à contrôler. Mesurer les surfaces par des points. Représenter les éléments tolérancés et de références. Construire les références spécifiées. Vérifier les spécifications par constructions géométriques et calculs de distances et d angles. Estimer les incertitudes sur les caractéristiques 2

3 Les limites de la mesure sur MMC Limites physiques vis à vis de l accessibilité des surfaces et de l incertitude des mesures Limites dues aux calculs disponibles dans les logiciels de mesure 3D 3

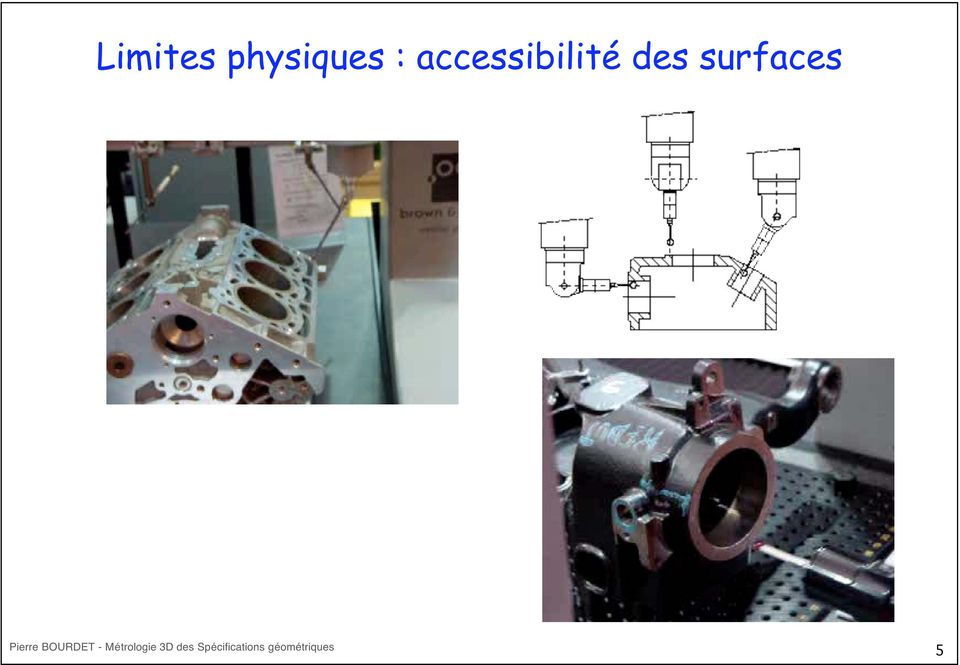
4 Limites physiques : accessibilité des surfaces 4

5 Limites physiques : accessibilité des surfaces 5
6 Choisir les outils de mesure Tête Extensions Capteurs Stylets 6

7 Acquérir des coordonnées de points z Dans un repère exprimer les coordonnées des points appartenant aux différentes surfaces de la pièce. y x 7

8 Coordonnées du point de contact (palpeur dynamique) palpeur Surface réelle point de contact 8

9 Point saisi, point mesuré : compensation du rayon du stylet du palpeur Coordonnées saisies par la MMC : centres ωi occupés successivement par le centre de la sphère du stylet Un point de contact réel sera estimé par un point mesuré Mi obtenu par une équation vectorielle : OMi = Oωi - r ni ω 1 ni : normale à la surface exacte passant au mieux des points saisis ωi (moindres carrés) ω2 ω 3 ω 4 Surface réelle point saisi point mesuré Mi point de contact réel ni ω i ω n palpeur Surface exacte des moindres carrés r : rayon apparent de la sphère du stylet. 9

10 Point saisi, point mesuré : (estimation de la normale) Le calcul des points mesurés nécessite de connaître la direction de la normale de compensation du rayon du stylet point saisi palpeur La normale est définie par une surface des moindres carrés de ω2 ω type connu par le «logiciel»: 3 ω plan 1 cylindre cône ou sphère ou imposée par l opérateur point mesuré ω 4 Surface réelle Mi point de contact réel ni ω i ω n Surface exacte des moindres carrés 10

11 Mesure d un point ou d une ligne sur une surface : maîtrise de la trajectoire du palpeur Les points et les lignes, sont définies par l intersection d un élément théorique exact (droite ou plan ) avec la surface portant les points mesurés. point Ligne circulaire Lignes rectilignes Conséquence le déplacement du palpeur doit être contrôlé par la CN de la MMC pour que chaque point de contact avec la surface appartienne au plan de coupe ou à la droite d intersection. La mesure des lignes et des points se trouvent ainsi limitées par les possibilités de «balançage» de la pièce dans le repère de la MMC. 11

12 Mesure d un point ou d une droite Point ou droite appartiennent à une surface identifiée par son type Point mesuré Proposée dans les logiciels Ligne mesurée Proposée dans les logiciels Sur un plan (ou sur un plan tangent à une surface de forme quelconque) oui Rectiligne sur un plan (ou sur un plan tangent à une surface quelconque) oui Suivant une normale imposée oui Rectiligne sur un cylindre Rectiligne sur un cône non non Sur une sphère non Circulaire mesurée sur un cylindre et projetée dans un plan oui Sur un cylindre non Circulaire sur une sphère non Circulaire sur un cylindre oui Sur un cône non Circulaire sur un cône non 12

13 Qualification d un palpeur Pour chaque «outil palpeur» et pour chacune de ses orientations il est nécessaire de qualifier : la valeur du rayon de compensation du palpeur : par mesure d un étalon (cale, bague, sphère) la position du centre ωi de la sphère du stylet du palpeur dans un repère unique de mesure de la MMC : par mesure d une sphère de référence fixée sur le marbre de la MMC 13

14 Détermination du rayon de compensation En mesures unidimensionnelles : par mesure d une cale étalon de longueur lo lo l r = (l - lo)/2 En mesures planes (bidimensionnelles) : par mesure d une bague étalon de diamètre do En mesures tridimensionnelles : par mesure d une sphère étalon de diamètre do d do r = (do - d)/2 d : cercle des moindres carrés do r = (d - do)/2 d : sphère des moindres carrés 14
/2 d : cercle des moindres carrés do r = (d - do)/2 d : sphère des moindres carrés")
15 Qualification du centre ωi du stylet dans un repère unique de mesure z z 0 2 z 0 1 x y x y x y Les coordonnées d un même nuage de points mesuré suivant deux orientations du palpeur, seront décalées dans le repère de la MMT du vecteur

16 Qualification du centre ωi du stylet dans un repère unique de mesure Le recalage des centre ωi se fait par la mesure dans le repère de la MMC, des 3 coordonnées du centre d une sphère de référence fixée sur le marbre de la MMC. L origine du repère unique de mesure est défini par le centre de la sphère de référence. L incertitude sur la mesure de la position du centre de la sphère de référence pourra se répercuter sur les caractéristiques mesurées z y x 16

17 Base de données géométriques d un logiciel de MMC 17

18 Les trois éléments géométriques de base L information géométrique contenue dans la base de données d une MMC s appuie sur trois éléments géométriques de base : le point, la droite et le plan. Ils sont définis par les coordonnées d un point et dans le cas d une droite ou d un plan par les composantes d un vecteur unitaire. Eléments géométriques de base point droite Plan position 3 coordonnées 3 coordonnées d un point courant 3 coordonnées d un point courant orientation 3 composantes d un vecteur unitaire parallèle à la droite 3 composantes d un vecteur unitaire normal au plan 18

19 Représentation d un élément géométrique réel Par l ensemble des points mesurés sur l élément. Par un élément géométrique théorique associé au nuage de points suivant le critère des moindres carrés et à la demande (option) tangent du côté libre de la matière 19
")
20 Critère des moindres carrés (ou critère de Gauss) proposé dans les logiciels de MMC L élément associé est tel que la somme des carrés des distances des points mesurés à l élément est minimale. di Σ(di) 2 minimale L élément associé passe au mieux des points. Il est dans le nuage de points L élément retenu pourra être un élément tangent extérieur matière et parallèle à l élément des moindres carrés 20

21 Représentation des éléments géométriques théoriques associés à des nuages de points Type d'élément géométrique associé Eléments géom. de base Paramètres intrinsèques Eléments extraits Point saisi point Point contenu dans un plan point point mesurés Droite des moindres carrés contenu dans un plan droite Ensemble des points mesurés sur la ligne réputée rectiligne Droite des moindres carrés en 3D droite Ensemble des points mesurés sur la ligne réputée rectiligne Cercle des moindres carrés contenu dans un plan. Plan + point (centre du cercle) rayon Ensemble des points mesurés sur la ligne réputée circulaire Plan des moindres carrés plan Ensemble des points mesurés sur la surface réputée plane Sphère des moindres carrés Point (centre du cercle) rayon Ensemble des points mesurés sur la surface réputée sphèrique Cylindre des moindres carrés Droite (axe du cylindre) rayon Ensemble des points mesurés sur la surface réputée cylindrique Cône des moindres carrés droite + point angle au sommet Ensemble des points mesurés sur la surface réputée conique 21
22 Remarques sur les critères d association Les normes de spécification ISO utilisent deux critères : Le mini-max (ou critère de Tchebychev) utilisé Dans les cas de la forme d un l'élément défaut de forme : distance minimale entre deux enveloppes contenant l'ensemble des points Dans les cas de références spécifiées Une référence spécifiée est tangente du coté libre de la matière avec un critère d optimisation : un écart maxi minimal pour les plans et les cônes le plus grand élément inscrit ou le plus petit élément circonscrit pour les cercles, sphères et cylindres. Et des contraintes d orientations ou (et) d e position Le critère des moindres carrés qui permet d établir les éléments dérivés des éléments tolérancés : (axe réel d un cylindre ou d un cône, plan médian extrait, centre d un cercle ou d une sphère etc.) Les surfaces réelles et leurs éléments dérivés sont définie par un ensemble très grand de points. 22
23 Critère du minimax préconisé par l ISO Le critère du minimax, ou critère de Tchebychev, permet de minimiser la plus grande valeur, ou de maximiser la plus petite valeur prise par une fonction reliant les paramètres de définition d'un élément géométrique. minimiser la distance entre deux plans ou deux droites parallèles contenant l'ensemble des points mesurés, minimiser la distance entre deux éléments concentriques contenant l'ensemble des points (cas du cercle, de la sphère, du cylindre et du cône) t mini t mini maximiser le diamètre de l'élément géométrique inscrit (cas du cercle, de la sphère et du cylindre), R maxi minimiser le diamètre de l'élément géométrique circonscrit (cas du cercle, de la sphère et du cylindre). R mini 23
24 Critère des moindres carrés ou Critère du mini max (logiciels de MMC et normes ISO) Quelles conclusions faut-il faire? que le critère des moindres carrés permet de définir les éléments dérivés tolérancés (normes ISO) que le critère des moindres carrés est bien adapté pour les surfaces de substitution (éléments tolérancés?) que le critère du mini max répond au critère d association des références spécifiées de l ISO? 24
25 Conclusion sur les critères d association L'objectif recherché sur une MMC est de situer mathématiquement chaque élément géométrique dans le repère de mesure. Si le critère du minimax de la norme est mieux adapté lorsque le nombre de points mesurés est important, la solution n est pas unique et peut donner des solutions aberrantes. plus grand cylindre inscrit Cylindre réel de forme conique plus petit cylindre circonscrit cylindre nominal cylindre nominal Portions de cylindres Le critère des moindres carrés retenu dans les logiciels de mesure sur MMC donne dans ce cas de bons résultats avec le faible nombre de points de mesure pris en compte. par la robustesse de la solution mathématique par le lissage des points de mesure aberrants 25
26 Construction d éléments géométriques La base de données peut-être enrichie de nouveaux éléments géométriques de type : point droite plan construits à partir de deux éléments pris parmi les points droites et plans déjà contenus dans la base de données. 26
27 Construction de points Point-point milieu de deux points Point-doite projection orthogonale du point/droite Point-plan projection orthogonale du point/plan Droite-droite intersection de deux droites (milieu de la perpendiculaire commune) Droite-plan intersection de la droite et du plan Point par ses coordonnées cartésiennes dans un repère Construction de droites Point-point droite passant par 2 points Point-droite droite passant par un point et perp. à une droite droite passant par un point et //à une droite Point-plan droite passant par un point et perp. à un plan Droite-droite médiane de deux droites coplanaires Droite-plan projection orthogonale d'une droite sur un plan Plan-plan intersection de deux plans Construction de plans Point-droite plan passant par un point et une droite plan passant par un point et perp. à une droite Point-plan plan passant par un point et parallèle à un plan Droite-droite plan passant par une droite et //à une droite Droite-plan plan passant par une droite et perp. à un plan Plan-plan plan médian de deux plans théoriquement // 27
28 Construction d axes orientés et de repères de dégauchissage Les axes orientés et les repères de dégauchissage ou repère pièce, sont obtenus par des opérations de constructions géométriques entre les éléments géométriques de la base de données. Ils ne correspondent pas aux systèmes de références spécifiées définis par la normalisation [ISO 5459]. Ils servent essentiellement à exprimer les résultats en projection sur un axe orienté ou sur les axes et les plans d'un repère. Ils servent également à exprimer, dans un repère, les trajectoires des déplacements du palpeur par CN Ils donnent la possibilité de construire des points par une ou plusieurs coordonnées On peut définir autant d axes orientés et de repères que l on veut. 28
29 Axe orienté Un axe orienté est défini par : Une direction définie par un vecteur unitaire de la base de données, celui d'une droite ou celui de la normale à un plan. Une origine définie par un point de la base de données Une orientation définie par un point choisi du coté du demi espace positif, ou par le sens extérieur matière dans le cas du plan. Repères de dégauchissage Un repère est défini par : Deux directions définies chacune par un vecteur unitaire de la base de données, celui d'une droite ou celui d un plan. Ces deux premières directions sont indépendantes et ne sont pas nécessairement orthogonales Une troisième direction calculée automatiquement par le logiciel perpendiculaire aux deux premières directions. Une origine définie par un point Une orientation définie par un point choisi dans le secteur positif du repère. O PT 29
30 Calculs de distances et d'angles Le calcul est effectué entre deux éléments géométriques point, droite et plan de la base de données. Quatre cas de calcul de distance Sur les 6 les cas théoriquement possibles de calcul de distances : point-point, point-droite, point-plan, droite-droite, droite-plan et planplan. Seuls les 4 premiers cas sont retenus, les 2 derniers cas donnent toujours une distance nulle ou une interprétation particulière. Trois cas de calcul d'angle droite-droite, droite-plan et plan-plan 30
31 Conclusions sur les possibilités des logiciels de MMC Une MMC est essentiellement une machine à mesurer des dimensions (linéaires et angulaires) entre des éléments géométriques de type point, droite et plan. Les éléments géométriques de type point, droite et plan sont obtenus par des opérations d association de points, droites, cercles, sphères, cylindres, cones et de surfaces complexes à des nuages de points et des opérations de construction entre les éléments géométriques (point, droite plan) de la base de données. Les mesures pourront-être exprimées en projection dans des repères C est avec la seule possibilité de calculer des distances et des angles entre des points des droites et des plans, que le contrôleur devra vérifier des spécifications dimensionnelles et géométriques ISO portées sur un dessin de définition. 31
32 Couvercle de l arbre intermédiaire 32
33 4xØ10±0,1 E Ø0,05 A B Dessin de définition Ø 0,04 A B Ø 0,03 A Ø58H8 E 28 2xØ10H7 Ø0,03 A E A 64 B 33
34 Contrôle de Ø 58H8 E Ø58H8 E 34
35 Contrôle d une spécification dimensionnelle (Ø58H8 avec E ) Définition ISO de la spécification Toutes les dimensions locales réelles doivent être 58,000 di 58,033 Exigence de l enveloppe : la surface réelle doit être extérieure à un cylindre de forme parfaite de diamètre au maximum de matière (Ø58,000) Mesure de la surface réputée cylindrique et modèle géométrique associé mesure en 12 points répartis sur la surface modèle associé : cylindre des moindres carrés tangent extérieur matière résultat : diamètre D du cylindre associé et défaut de forme df sur les 12 pts Interprétation du résultat Dimensions locales réelles : vérifier si D 58,000 et (D + 2df) 58,033 Exigence de l enveloppe : vérifier si D 58,000 Incertitude sur la mesure de la caractéristique 35
36 Dessin de définition (perpendicularité) Ø 0,03 A Ø58H8 E A 36
37 Contrôle d une spécification géométrique : Ø 0,03 A perpendicularité de l alésage Ø58 Définition ISO de la spécification Elément tolérancé : axe réel de l alésage Ø58 Eléments de référence : surface réputée plane A Référence spécifiée : plan A tangent extérieur matière et minimisant l écart de forme zone de tolérance : cylindre Ø 0,03 d axe perpendiculaire au plan de référence spécifié A Mesure des surfaces et modèles géométriques de la base de données mesure en 12 points répartis sur l alésage modèle associé : cylindre des moindres CY1 carrés tangent extérieur matière CY1 mesure en 14 points répartis sur la surface réputée plane modèle associé : plan des moindres carrés tangent extérieur matière PL2 (axe du cylindre des moindres carrés) PL2 (Plan des moindres carrés) 37
38 Ø 0,03 A L axe réel est défini par 2 points extrêmes L axe réel du cylindre est déterminé par les 2 points extrêmes PT8 et PT9 délimitant l axe du cylindre des moindres carrés construction du point PT3 intersection de la droite CY1 et du plan PL2 construction d un axe orienté défini par une direction : le plan PL2 une origine : le point PT3 une orientation extérieure à la matière du plan PL2 PT5 PT4 PT8 PT9 CY1 (axe du cylindre des moindres carrés) PL6 PL7 construction de deux points PT4 et PT5 de coordonnées -5 et -35 (géométrie nominale) construction d un plan PL6 passant par le point PT4 et parallèle au plan PL2 construction d un plan PL7 passant par le point PT5 et parallèle au plan PL2 construction du point PT8 intersection de PL6 et de la droite CY1 construction du point PT9 intersection de PL7 et de la droite CY1 PT3 PL2 (Plan des moindres carrés) 38
39 Ø 0,03 A Vérification de la tolérance de perpendicularité La direction du plan de référence spécifié est déterminée par le plan des moindres carrés. L axe de la zone de tolérance est définie par une droite DR10 construction d une droite DR10 passant par PT8 et perpendiculaire au plan PL2 La condition d appartenance à la zone de tolérance Øt est définie par : le calcul de la distance d entre le point PT9 et la droite DR10 la condition d t DR10 CY1 (axe du cylindre des moindres carrés) PT5 PT9 PL7 PT4 PT8 PL6 PT3 PL2 (Plan des moindres carrés) 39
40 Ø 0,03 A Vérification de la tolérance de perpendicularité (2 ème solution) La direction du plan de référence spécifié est déterminée par le plan des moindres carrés. L axe du cylindre est défini par le cylindre des moindres carrés La condition d appartenance à la zone de tolérance Ø0,03 est définie par : le calcul de la distance d : produit de la hauteur h de l alésage Ø58 par la tangente de l angle a entre la normale au plan PL2 et l axe du cylindre. d = h tang α Condition : d 0,03 d α CY1 (axe du cylindre des moindres carrés) h PL2 (Plan des moindres carrés) 40
41 Ø 0,03 A L axe réel est définie par plusieurs points L axe réel du cylindre est déterminé par les centres de 3 cercles des moindres carrés mesurés dans 3 plans perpendiculaires à l axe du cylindre des moindres carrés construction du point PT3 intersection de la droite CY1 et du plan PL2 CY1 (axe du cylindre des moindres carrés) construction d un axe orienté défini par une direction : le plan PL2 une origine le point PT3 une orientation extérieure à la matière du plan PL2 construction de trois points PT4, PT5 et PT6 de coordonnées -6, -20 et -34 (définies par la géométrie nominale) construction de 3 plans PL7, PL8 et PL9 passant par les points PT4, PT5 et PT6 et perpendiculaires à l axe CY1 PT6 PT5 PT4 PT3 CE12 mesure de 3 cercles CE10, CE11 et CE12 projetés respectivement dans les 3 plans PL7, PL8 et PL9. Chaque cercle est mesuré en 8 points. CE10 CE11 PL9 PL8 PL7 PL2 (Plan des moindres carrés) 41
42 Ø 0,03 A Vérification de la tolérance de perpendicularité Construction des points PT13, PT14 et PT15 projections orthogonales des points CE10, CE11 et CE12 dans le plan PL2 Construction du cercle passant par les 3 points PT13, PT14 et PT15 Le diamètre d du cercle doit être inférieur ou égale à la taille de la zone de tolérance. d 0,03mm PT6 PT5 PT4 PT3 PT13 CE10 CE12 CE11 CY1 (axe du cylindre des moindres carrés) PL9 PL8 PL7 PT15 PT14 PL2 (Plan des moindres carrés) 42
43 Localisation 2 trous Ø10H7 : Dessin de définition 2xØ10H7 E Ø0,03 A 64 A 43
44 Contrôle d une spécification géométrique : (localisation d un groupe de 2 alésages Ø10H7) Définition ISO de la spécification Elément tolérancé : axes réels de 2 cylindres Elément de référence : surface réputée plane A Référence spécifiée : plan A tangent extérieur matière et minimisant l écart de forme zone de tolérance : groupe de 2 cylindres Ø0,03 d axes perpendiculaires au plan A et distants de 64 mm 44
45 Mesure des surfaces et modèles géométriques de la base de données mesure en 14 points répartis sur la surface réputée plane modèle associé : plan des moindres carrés tangent extérieur matière PL1 résultat : défaut de forme df sur les 14 pts mesure en 8 points répartis sur l alésage Ø10H7 modèle associé : cylindre des moindres carrés tangent extérieur matière CY2 résultat : diamètre Ø2 du cylindre associé et défaut de forme df sur les 8 pts mesure en 8 points répartis sur l alésage Ø10H7 modèle associé : cylindre des moindres carrés tangent extérieur matière CY3 résultat : diamètre Ø3 du cylindre associé et défaut de forme df sur les 8 pts CY3 CY2 PL1 (Plan des moindres carrés) 45
46 Représentation des éléments tolérancés Les axes réels des 2 cylindres sont déterminés par les points extrêmes PT4, PT8 et PT5, PT9 délimitant chacun des axes des cylindres des moindres carrés construction des points PT4 et PT5 intersections des droites CY2 et CY3 et du plan PL1 construction d un axe orienté défini par une direction : le plan PL1 une origine le point PT4 une orientation extérieure à la matière du plan PL1 PL7 PT8 CY2 PT6 PT9 CY3 PT5 construction d un points PT6 de coordonnée -10 mm PT4 PL1 (Plan des moindres carrés) construction d un plan PL7 passant par le point PT6 et parallèle au plan PL1 construction des points PT8 et PT9 intersections des droites CY2 et CY3 et du plan PL7 46
47 Constructions : Définition du groupe des deux axes des zones de tolérance d un point PT10 milieu des 2 points PT4 et PT8 de l axe CY2 du point PT11 milieu des 2 points PT5 et PT9 de l axe CY3 de la droite DR13 passant par les points PT10 et PT11 du point PT12 milieu des 2 points PT10 et PT11 de l axe orienté défini par une direction : le droite DR13 une origine le point PT12 une orientation vers le point PT10 de 2 points PT14 et PT15 de coordonnées +32 et -32 PL7 DR16 PT14 de 2 droites DR16 et DR17 passant par les points PT14 et PT15 et perpendiculaires au plan PL1 PT8 PT10 CY2 PT4 DR17 PT9 DR13 PT11 PT15 CY3 PT12 PT5 PL1 (Plan des moindres carrés) 47
48 Vérification de la tolérance de localisation Les axes réels des cylindres étant déterminés par les points extrêmes PT4, PT8 pour le cylindre CY1 et PT5, PT9 pour le cylindre CY2 La vérification de la tolérance de position est définie par : le calcul des distances d1 et d2 des points PT4 et PT8 à la droite DR16 le calcul des distances d3 et d4 PT9 DR16 des points PT5 et PT9 à la droite DR17 PT8 PT11 PL7 Conditions : PT10 CY3 PT4 PT12 d1 t/2 CY2 PT5 d2 t/2 PT4 PL1 d3 t/2 d4 t/2 DR17 DR13 (Plan des moindres carrés) 48
49 Localisation Ø58H8 : Dessin de définition Ø0,04 A B Ø 0,03 A Ø58H8 E 28 2xØ10H7 Ø0,03 A B E A 49
50 Contrôle de la localisation de l alésage Ø58H8 Définition ISO de la spécification Elément tolérancé : axe réel de l alésage Ø58 Eléments de référence : surface réputée plane A, 2 surfaces réputées cylindriques B Système de références spécifiées : plan A tangent extérieur matière et minimisant l écart de forme Référence B : un plan et une droite. Le plan passe par 2 droites parallèles distantes de 64 mm. Les droites sont les axes de 2 cylindres, perpendiculaires au plan A, de même plus grand diamètre inscrit dans les 2 alésages. La droite de la référence spécifiée est l axe de droite sur le dessin. zone de tolérance : cylindre Ø0,04 d axe perpendiculaire au plan A, distant de 28 du plan B et de 31 de la droite B (à droite sur le dessin) 50
51 Mesure des surfaces et modèles géométriques de la base de données mesure en 8 points répartis sur l alésage Ø58H8 modèle associé : cylindre des moindres carrés tangent extérieur matière CY1 résultat : diamètre D1 du cylindre associé et défaut de forme df sur les 8 pts mesure en 14 points répartis sur la surface réputée plane modèle associé : plan des moindres carrés tangent extérieur matière PL2 résultat : défaut de forme df sur les 14 pts mesure en 8 points répartis sur l alésage Ø10H7 modèle associé : cylindre des moindres carrés tangent extérieur matière CY3 résultat : diamètre D3 du cylindre associé et défaut de forme df sur les 8 pts CY1 (axe du cylindre des moindres carrés) CY3 mesure en 8 points répartis sur l alésage Ø10H7 modèle associé : cylindre des moindres carrés tangent extérieur matière CY4 résultat : diamètre D4 du cylindre associé et défaut de forme df sur les 8 pts CY4 PL2 (Plan des moindres carrés) 51
52 Représentation de l élément tolérancé L axe réel du cylindre est déterminé par les 2 points extrêmes PT10 et PT11 délimitant l axe du cylindre des moindres carrés construction du point PT5 intersection de la droite CY1 et du plan PL2 construction d un axe orienté défini par une direction : le plan PL2 une origine le point PT5 une orientation extérieure à la matière du plan PL2 construction du point PT10 intersection de PL8 et de la droite CY1 construction du point PT11 intersection de PL9 et de la droite CY1 PT7 PT6 PT5 PT10 CY4 CY1 (axe du cylindre des moindres carrés) construction de deux points PT6 et PT7 de coordonnées -5 et -30 construction d un plan PL8 passant par le point PT6 et parallèle au plan PL2 PL8 PL9 CY3 PL2 (Plan des moindres carrés) construction d un plan PL9 passant par le point PT7 et parallèle au plan PL2 PT11 52
53 Représentation du système de références spécifiées A B Plan de référence spécifié A : plan PL2 Plan de référence spécifié B : plan PL17 CY1 (axe du cylindre des moindres carrés) Constructions : d un plan PL13 passant par le point PT12 de coordonnée - 5 et parallèle au plan PL2 PT7 PT11 PL9 du point PT14 intersection du CY3 et du plan PL13 du point PT15 intersection du CY4 et du plan PL13 PT6 PT12 PT5 PT15 PT10 CY4 DR16 PL8 PT14 PL13 CY3 PL2 (Plan des moindres carrés) de la droite DR16 passant par les points PT14 et PT15 PL17 du plan PL17 passant par la droite DR16 et perpendiculaire au plan PL2 53
54 Définition de l axe de la zone de tolérance par la droite DR23 intersection de deux plans PL20 et PL22 Plan PL20 construction du point PT18 milieu deux points PT14 et PT15 construction d un axe orienté défini par une direction : la droite DR16 une origine le point PT18 une orientation le point PT14 construction d un point PT19 de coordonnées 1 mm construction du plan PL20 passant par le point PT19 et perpendiculaire à la droite DR16 PT21 CY3 PT19 PT14 CY4 PT18 PT15 PL13 Construction de la droite DR23 : intersection des deux plans PL20 et PL22 PL17 PL20 DR23 PL22 DR16 PL2 (Plan des moindres carrés) Plan PL22 construction d un axe orienté défini par : une direction le plan PL17, une origine le point PT19, une orientation le point PT10 construction d un point PT21 de coordonnées 28 mm PT10 construction du plan PL22 passant par le point PT21 et parallèle au plan PL17 54
55 Vérification de la tolérance de localisation L axe réel du cylindre étant déterminé par les 2 points extrêmes PT10 et PT11 DR23 CY1 (axe du cylindre des moindres carrés) L axe de la zone étant défini par la droite DR23 d2 PT11 La vérification de la tolérance de position est définie par : d1 PT10 le calcul des distances d1 et d2 entre les points PT10 et PT11 à la droite DR23 (axe de la zone) Conditions : Ø t PL2 (Plan des moindres carrés) d1 t/2 d2 t/2 DR23 d1 PT10 d2 PT11 55
56 Localisation 4xØ10±0,1 : Dessin de définition Ø 0,04 A B 4xØ10±0,1 E 50 Ø 0,03 A 25 Ø0,05 A B Ø58H8 E 28 2xØ10H7 Ø0,03 A E A 64 B 56
57 Contrôle de la localisation de 4 trous Ø10±0,1 Définition ISO de la spécification Elément tolérancé : axes réels de 4 surfaces réputées cylindriques Eléments de référence : surface réputée plane A et 2 surfaces réputées cylindriques B Système de références spécifiées : plan A tangent extérieur matière et minimisant l écart de forme Référence spécifiée B : un plan et une droite. Le plan passe par 2 droites parallèles distantes de 64 mm. Les droites sont les axes de 2 cylindres, perpendiculaires au plan A, de même plus grand diamètre inscrit dans les 2 alésages. La droite de la référence spécifiée est l axe de droite sur le dessin. Zone de tolérance : groupe de 4 cylindres Ø0,05 perpendiculaires au plan P, positionnés entre eux par rapport à un plan et une droite(dimensions : 25-36, 18-42, 45-43, 50-25). Le groupe des 4 cylindres est positionné par rapport au système de références spécifiées B, par l angle de 18 et par les deux dimensions 31 et
58 Dessin de définition (avec exigence M) 4xØ10±0,1 Ø0,05 M A B E M Ø 0,04 A B Ø 0,03 M A Ø58H8 E 28 2xØ10H7 Ø0,03 M A E A B 58
59 Localisation 4xØ10±0,1 : Dessin de définition Ø 0,04 A B 4xØ10±0,1 E 50 Ø 0,03 M A 25 Ø0,05 M A B Ø58H8 E 28 2xØ10H7 E Ø0,03 M A A 64 B 59
60 Contrôle de la localisation de 4 trous Ø10±0,1 Définition ISO de la spécification Elément tolérancé : 4 surfaces réputées cylindriques Eléments de référence : surface réputée plane A et 2 surfaces réputées cylindriques B Système de références spécifiées : plan A tangent extérieur matière et minimisant l écart de forme Référence B : un plan et une droite. Le plan passe par 2 droites parallèles distantes de 64 mm. Les droites sont les axes de 2 cylindres, perpendiculaires au plan A, de même plus grand diamètre inscrit dans les 2 alésages. La droite de la référence spécifiée est l un des deux axes. Etat virtuel de l élément tolérancé : groupe de 4 cylindres Ø9,85 en position théoriques exacte par rapport à 2 plans perp. (dimensions ) Position de l état virtuel / Système de Réf. Spécifiées : le groupe des 4 cylindres est perpendiculaire au plan P et positionné par l angle de 18 et par les deux dimensions 31 et
61 Localisation 4xØ10±0,1 : Dessin de définition 4xØ10±0,1 Ø0,05 M A B E M Ø 0,04 A B Ø 0,03 M A Ø58H8 E 28 2xØ10H7 Ø0,03 M A E A B 61
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
C - ICM LTE Gamme DE
 Gamme DELTEC - ICM ICM micro Projecteur de profil numérique 2D Système de mesure 2D, fruit de plus de 25 ans d expérience dans la métrologie par vision! Déposer c est mesurer! - Reconnaissance de la pièce
Gamme DELTEC - ICM ICM micro Projecteur de profil numérique 2D Système de mesure 2D, fruit de plus de 25 ans d expérience dans la métrologie par vision! Déposer c est mesurer! - Reconnaissance de la pièce
GMEC1311 Dessin d ingénierie. Chapitre 1: Introduction
 GMEC1311 Dessin d ingénierie Chapitre 1: Introduction Contenu du chapitre Introduction au dessin technique Normes Vues Traits Échelle Encadrement 2 Introduction Les dessins ou graphiques sont utilisés
GMEC1311 Dessin d ingénierie Chapitre 1: Introduction Contenu du chapitre Introduction au dessin technique Normes Vues Traits Échelle Encadrement 2 Introduction Les dessins ou graphiques sont utilisés
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Nom : Groupe : Date : 1. Quels sont les deux types de dessins les plus utilisés en technologie?
 Nom : Groupe : Date : Verdict Chapitre 11 1 La communication graphique Pages 336 et 337 1. Quels sont les deux types de dessins les plus utilisés en technologie? Les dessins de fabrication. Les schémas.
Nom : Groupe : Date : Verdict Chapitre 11 1 La communication graphique Pages 336 et 337 1. Quels sont les deux types de dessins les plus utilisés en technologie? Les dessins de fabrication. Les schémas.
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
COMPTE-RENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre?
 Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
PC-DMIS NC. 3D Form Inspect. PC-DMIS NC Gage
 Mesurer dans la machine-outil Solutions logicielles de mesure Contrôle sur machine suivi du processus Solutions logicielles évolutives En tant que leader technologique du palpage et du contrôle outils
Mesurer dans la machine-outil Solutions logicielles de mesure Contrôle sur machine suivi du processus Solutions logicielles évolutives En tant que leader technologique du palpage et du contrôle outils
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
1S Modèles de rédaction Enoncés
 Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
1 Création d une pièce. 2 Travail complémentaire. 1-1 Réglage des barres d outils. 1-2 Exemples de réalisation de pièces à l aide d un modeleur 3D
 SolidWorks Logiciel de DAO (Dessin Assisté par Ordinateur) Palonnier Servomoteur SOMMAIRE : 1 Création d une pièce 1-1 Réglage des barres d outils 1-2 Exemples de réalisation de pièces à l aide d un modeleur
SolidWorks Logiciel de DAO (Dessin Assisté par Ordinateur) Palonnier Servomoteur SOMMAIRE : 1 Création d une pièce 1-1 Réglage des barres d outils 1-2 Exemples de réalisation de pièces à l aide d un modeleur
Si deux droites sont parallèles à une même troisième. alors les deux droites sont parallèles entre elles. alors
 N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
N I) Pour démontrer que deux droites (ou segments) sont parallèles (d) // (d ) (d) // (d ) deux droites sont parallèles à une même troisième les deux droites sont parallèles entre elles (d) // (d) deux
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Cabri et le programme de géométrie au secondaire au Québec
 Cabri et le programme de géométrie au secondaire au Québec Benoît Côté Département de mathématiques, UQAM, Québec [email protected] 1. Introduction - Exercice de didactique fiction Que signifie intégrer
Cabri et le programme de géométrie au secondaire au Québec Benoît Côté Département de mathématiques, UQAM, Québec [email protected] 1. Introduction - Exercice de didactique fiction Que signifie intégrer
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
G.P. DNS02 Septembre 2012. Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3. Réfraction
 DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
Cercle trigonométrique et mesures d angles
 Cercle trigonométrique et mesures d angles I) Le cercle trigonométrique Définition : Le cercle trigonométrique de centre O est un cercle qui a pour rayon 1 et qui est muni d un sens direct : le sens inverse
Cercle trigonométrique et mesures d angles I) Le cercle trigonométrique Définition : Le cercle trigonométrique de centre O est un cercle qui a pour rayon 1 et qui est muni d un sens direct : le sens inverse
Paris et New-York sont-ils les sommets d'un carré?
 page 95 Paris et New-York sont-ils les sommets d'un carré? par othi Mok (3 ), Michel Vongsavanh (3 ), Eric hin (3 ), iek-hor Lim ( ), Eric kbaraly ( ), élèves et anciens élèves du ollège Victor Hugo (2
page 95 Paris et New-York sont-ils les sommets d'un carré? par othi Mok (3 ), Michel Vongsavanh (3 ), Eric hin (3 ), iek-hor Lim ( ), Eric kbaraly ( ), élèves et anciens élèves du ollège Victor Hugo (2
Programmation linéaire
 Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
Programmation linéaire DIDIER MAQUIN Ecole Nationale Supérieure d Electricité et de Mécanique Institut National Polytechnique de Lorraine Mathématiques discrètes cours de 2ème année Programmation linéaire
C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position OM est constant et il est égal au
 1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
Mesure d angles et trigonométrie
 Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
Comment démontrer que deux droites sont perpendiculaires?
 omment démontrer que deux droites sont perpendiculaires? Utilisons On sait que (hypothèses) or...(propriété, définition) donc...(conclusion) Réciproque de Pythagore,5 1,5 = + Si dans un triangle le carré
omment démontrer que deux droites sont perpendiculaires? Utilisons On sait que (hypothèses) or...(propriété, définition) donc...(conclusion) Réciproque de Pythagore,5 1,5 = + Si dans un triangle le carré
t 100. = 8 ; le pourcentage de réduction est : 8 % 1 t Le pourcentage d'évolution (appelé aussi taux d'évolution) est le nombre :
 est le nombre :") Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Cours d Analyse. Fonctions de plusieurs variables
 Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
Cours d Analyse Fonctions de plusieurs variables Licence 1ère année 2007/2008 Nicolas Prioux Université de Marne-la-Vallée Table des matières 1 Notions de géométrie dans l espace et fonctions à deux variables........
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX
 SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications
 Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Optimisation non linéaire Irène Charon, Olivier Hudry École nationale supérieure des télécommunications A. Optimisation sans contrainte.... Généralités.... Condition nécessaire et condition suffisante
Cours Fonctions de deux variables
 Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
Cours Fonctions de deux variables par Pierre Veuillez 1 Support théorique 1.1 Représentation Plan et espace : Grâce à un repère cartésien ( ) O, i, j du plan, les couples (x, y) de R 2 peuvent être représenté
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
La perspective conique
 La perspective conique Définitions et principes. Deux cas de la perspective conique : la perspective conique oblique et la perspective conique centrale. Principe de la perspective conique : . La perspective
La perspective conique Définitions et principes. Deux cas de la perspective conique : la perspective conique oblique et la perspective conique centrale. Principe de la perspective conique : . La perspective
Fonctions de plusieurs variables
 Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
Maths MP Exercices Fonctions de plusieurs variables Les indications ne sont ici que pour être consultées après le T (pour les exercices non traités). Avant et pendant le T, tenez bon et n allez pas les
La programmation linéaire : une introduction. Qu est-ce qu un programme linéaire? Terminologie. Écriture mathématique
 La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
La programmation linéaire : une introduction Qu est-ce qu un programme linéaire? Qu est-ce qu un programme linéaire? Exemples : allocation de ressources problème de recouvrement Hypothèses de la programmation
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
EXERCICES DE REVISIONS MATHEMATIQUES CM2
 EXERCICES DE REVISIONS MATHEMATIQUES CM2 NOMBRES ET CALCUL Exercices FRACTIONS Nommer les fractions simples et décimales en utilisant le vocabulaire : 3 R1 demi, tiers, quart, dixième, centième. Utiliser
EXERCICES DE REVISIONS MATHEMATIQUES CM2 NOMBRES ET CALCUL Exercices FRACTIONS Nommer les fractions simples et décimales en utilisant le vocabulaire : 3 R1 demi, tiers, quart, dixième, centième. Utiliser
Thème 17: Optimisation
 OPTIMISATION 45 Thème 17: Optimisation Introduction : Dans la plupart des applications, les grandeurs physiques ou géométriques sont exprimées à l aide d une formule contenant une fonction. Il peut s agir
OPTIMISATION 45 Thème 17: Optimisation Introduction : Dans la plupart des applications, les grandeurs physiques ou géométriques sont exprimées à l aide d une formule contenant une fonction. Il peut s agir
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Analyse statique d une pièce
 Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
Analyse statique d une pièce Contrainte de Von Mises sur une chape taillée dans la masse 1 Comportement d un dynamomètre On considère le dynamomètre de forme globalement circulaire, excepté les bossages
PHYSIQUE 2 - Épreuve écrite
 PHYSIQUE - Épreuve écrite WARIN André I. Remarques générales Le sujet de physique de la session 010 comprenait une partie A sur l optique et une partie B sur l électromagnétisme. - La partie A, à caractère
PHYSIQUE - Épreuve écrite WARIN André I. Remarques générales Le sujet de physique de la session 010 comprenait une partie A sur l optique et une partie B sur l électromagnétisme. - La partie A, à caractère
Corrigé du baccalauréat S Pondichéry 12 avril 2007
 Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Corrigé du baccalauréat S Pondichéry 1 avril 7 EXERCICE 1 Commun à tous les candidats 4 points 1 a Les vecteurs AB et AC ont pour coordonnées AB ; ; ) et AC 1 ; 4 ; 1) Ils ne sont manifestement pas colinéaires
Exprimer ce coefficient de proportionnalité sous forme de pourcentage : 3,5 %
 23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
23 CALCUL DE L INTÉRÊT Tau d intérêt Paul et Rémi ont reçu pour Noël, respectivement, 20 et 80. Ils placent cet argent dans une banque, au même tau. Au bout d une année, ce placement leur rapportera une
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé.
 Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
Enoncé et corrigé du brevet des collèges dans les académies d Aix- Marseille, Montpellier, Nice Corse et Toulouse en 2000. Énoncé. I- ACTIVITES NUMERIQUES (12 points) Exercice 1 (3 points) On considère
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
Fonctions linéaires et affines. 1 Fonctions linéaires. 1.1 Vocabulaire. 1.2 Représentation graphique. 3eme
 Fonctions linéaires et affines 3eme 1 Fonctions linéaires 1.1 Vocabulaire Définition 1 Soit a un nombre quelconque «fixe». Une fonction linéaire associe à un nombre x quelconque le nombre a x. a s appelle
Fonctions linéaires et affines 3eme 1 Fonctions linéaires 1.1 Vocabulaire Définition 1 Soit a un nombre quelconque «fixe». Une fonction linéaire associe à un nombre x quelconque le nombre a x. a s appelle
PROBLEME(12) Première partie : Peinture des murs et du plafond.
 Première partie : Peinture des murs et du plafond.") PROBLEME(12) Une entreprise doit rénover un local. Ce local a la forme d'un parallélépipède rectangle. La longueur est 6,40m, la largeur est 5,20m et la hauteur est 2,80m. Il comporte une porte de 2m de
PROBLEME(12) Une entreprise doit rénover un local. Ce local a la forme d'un parallélépipède rectangle. La longueur est 6,40m, la largeur est 5,20m et la hauteur est 2,80m. Il comporte une porte de 2m de
Michel Henry Nicolas Delorme
 Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
Michel Henry Nicolas Delorme Mécanique du point Cours + Exos Michel Henry Maître de conférences à l IUFM des Pays de Loire (Le Mans) Agrégé de physique Nicolas Delorme Maître de conférences à l université
TOUT CE QU IL FAUT SAVOIR POUR LE BREVET
 TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
TOUT E QU IL FUT SVOIR POUR LE REVET NUMERIQUE / FONTIONS eci n est qu un rappel de tout ce qu il faut savoir en maths pour le brevet. I- Opérations sur les nombres et les fractions : Les priorités par
SOMMAIRE OPÉRATIONS COURANTES OPÉRATIONS D INVENTAIRE
 SOMMAIRE OPÉRATIONS COURANTES OPÉRATIONS D INVENTAIRE 1 Factures de doit p. 9 Processus 1 2 Réductions sur factures de doit p. 11 Processus 1 3 Frais accessoires sur factures p. 13 Processus 1 4 Comptabilisation
SOMMAIRE OPÉRATIONS COURANTES OPÉRATIONS D INVENTAIRE 1 Factures de doit p. 9 Processus 1 2 Réductions sur factures de doit p. 11 Processus 1 3 Frais accessoires sur factures p. 13 Processus 1 4 Comptabilisation
Correction du Baccalauréat S Amérique du Nord mai 2007
 Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Correction du Baccalauréat S Amérique du Nord mai 7 EXERCICE points. Le plan (P) a une pour équation cartésienne : x+y z+ =. Les coordonnées de H vérifient cette équation donc H appartient à (P) et A n
Analyse en Composantes Principales
 Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
Analyse en Composantes Principales Anne B Dufour Octobre 2013 Anne B Dufour () Analyse en Composantes Principales Octobre 2013 1 / 36 Introduction Introduction Soit X un tableau contenant p variables mesurées
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
Un Partenaire à Vos Mesures METROLOGIE
 41 rue Dulong F-75017 Paris (France) Tél. : + 33 142 27 79 08 Fax : + 33 142 27 49 95 [email protected] www.eurobusiness-fr.com Un Partenaire à Vos Mesures METROLOGIE 2010 EuroBusiness-Partners
41 rue Dulong F-75017 Paris (France) Tél. : + 33 142 27 79 08 Fax : + 33 142 27 49 95 [email protected] www.eurobusiness-fr.com Un Partenaire à Vos Mesures METROLOGIE 2010 EuroBusiness-Partners
Moteur monocylindre de tondeuse auto-tractée. Pascal MORENTON [email protected] http://cao.etudes.ecp.fr
 Formation au logiciel CATIA V5 Guide d utilisation 3.3 Moteur monocylindre de tondeuse auto-tractée Utilisation de l atelier «DMU/Space Analysis» Pascal MORENTON [email protected] http://cao.etudes.ecp.fr
Formation au logiciel CATIA V5 Guide d utilisation 3.3 Moteur monocylindre de tondeuse auto-tractée Utilisation de l atelier «DMU/Space Analysis» Pascal MORENTON [email protected] http://cao.etudes.ecp.fr
Construction d un cercle tangent à deux cercles donnés.
 Préparation au CAPES Strasbourg, octobre 2008 Construction d un cercle tangent à deux cercles donnés. Le problème posé : On se donne deux cercles C et C de centres O et O distincts et de rayons R et R
Préparation au CAPES Strasbourg, octobre 2008 Construction d un cercle tangent à deux cercles donnés. Le problème posé : On se donne deux cercles C et C de centres O et O distincts et de rayons R et R
Roulements à une rangée de billes de génération C. Information Technique Produit
 Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
= 1 si n = m& où n et m sont souvent des indices entiers, par exemple, n, m = 0, 1, 2, 3, 4... En fait,! n m
 1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
1 épartement de Physique, Université Laval, Québec Pierre Amiot, 1. La fonction delta et certaines de ses utilisations. Clientèle Ce texte est destiné aux physiciens, ingénieurs et autres scientifiques.
LES TYPES DE DONNÉES DU LANGAGE PASCAL
 LES TYPES DE DONNÉES DU LANGAGE PASCAL 75 LES TYPES DE DONNÉES DU LANGAGE PASCAL CHAPITRE 4 OBJECTIFS PRÉSENTER LES NOTIONS D ÉTIQUETTE, DE CONS- TANTE ET DE IABLE DANS LE CONTEXTE DU LAN- GAGE PASCAL.
LES TYPES DE DONNÉES DU LANGAGE PASCAL 75 LES TYPES DE DONNÉES DU LANGAGE PASCAL CHAPITRE 4 OBJECTIFS PRÉSENTER LES NOTIONS D ÉTIQUETTE, DE CONS- TANTE ET DE IABLE DANS LE CONTEXTE DU LAN- GAGE PASCAL.
point On obtient ainsi le ou les points d inter- entre deux objets».
 Déplacer un objet Cliquer sur le bouton «Déplacer». On peut ainsi rendre la figure dynamique. Attraper l objet à déplacer avec la souris. Ici, on veut déplacer le point A du triangle point ABC. A du triangle
Déplacer un objet Cliquer sur le bouton «Déplacer». On peut ainsi rendre la figure dynamique. Attraper l objet à déplacer avec la souris. Ici, on veut déplacer le point A du triangle point ABC. A du triangle
Construction de la bissectrice d un angle
 onstruction de la bissectrice d un angle 1. Trace un angle. 1. 2. Trace un angle cercle. de centre (le sommet de l angle) et de rayon quelconque. 1. 2. 3. Trace Le cercle un angle cercle coupe. de la demi-droite
onstruction de la bissectrice d un angle 1. Trace un angle. 1. 2. Trace un angle cercle. de centre (le sommet de l angle) et de rayon quelconque. 1. 2. 3. Trace Le cercle un angle cercle coupe. de la demi-droite
DURÉE DU JOUR EN FONCTION DE LA DATE ET DE LA LATITUDE
 DURÉE DU JUR E FCTI DE LA DATE ET DE LA LATITUDE ous allons nous intéresser à la durée du jour, prise ici dans le sens de période d éclairement par le Soleil dans une journée de 4 h, en un lieu donné de
DURÉE DU JUR E FCTI DE LA DATE ET DE LA LATITUDE ous allons nous intéresser à la durée du jour, prise ici dans le sens de période d éclairement par le Soleil dans une journée de 4 h, en un lieu donné de
Centreur fin cylindrique pour la fabrication de moules. Le développement
 Le développement Centreur fin cylindrique pour la fabrication de moules Avantages Durabilité: pour la production de grandes séries Sans jeu pour un alignement précis du moule Temps de cycle plus courts
Le développement Centreur fin cylindrique pour la fabrication de moules Avantages Durabilité: pour la production de grandes séries Sans jeu pour un alignement précis du moule Temps de cycle plus courts
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands.
 Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
Catalogue des connaissances de base en mathématiques dispensées dans les gymnases, lycées et collèges romands. Pourquoi un autre catalogue en Suisse romande Historique En 1990, la CRUS (Conférences des
1 Complément sur la projection du nuage des individus
 TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
Baccalauréat S Nombres complexes Index des exercices sur les complexes de septembre 1999 à juin 2012 Tapuscrit : DENIS VERGÈS
 Baccalauréat S Nombres complexes Index des exercices sur les complexes de septembre 1999 à juin 2012 Tapuscrit : DENIS VERGÈS N o Lieu et date Q.C.M. Algébrique Géométrie 1 Asie juin 2012 2 Métropole juin
Baccalauréat S Nombres complexes Index des exercices sur les complexes de septembre 1999 à juin 2012 Tapuscrit : DENIS VERGÈS N o Lieu et date Q.C.M. Algébrique Géométrie 1 Asie juin 2012 2 Métropole juin
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
NOTIONS ÉLEMENTAIRES SUR LES PNEUS
 CE QU IL Y A DANS UN PNEU CEINTURES BANDE DE ROULEMENT ISOLANT DE NAPPES CARCASSE À ARCEAUX DROITS GARNITURE INTÉRIEURE CARCASSE TRINGLE FLANC La GARNITURE INTÉRIEURE du pneu maintient l air dans le pneu.
CE QU IL Y A DANS UN PNEU CEINTURES BANDE DE ROULEMENT ISOLANT DE NAPPES CARCASSE À ARCEAUX DROITS GARNITURE INTÉRIEURE CARCASSE TRINGLE FLANC La GARNITURE INTÉRIEURE du pneu maintient l air dans le pneu.
LE PRODUIT SCALAIRE ( En première S )
") LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
LE PRODUIT SCALAIRE ( En première S ) Dernière mise à jour : Jeudi 4 Janvier 007 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble ( Année 006-007 ) 1 Table des matières 1 Grille d autoévaluation
CONSTRUCTION DES PROJECTIONS TYPES DE PROJECTION. Projection => distorsions. Orientations des projections
 A.Charbonnel SYNTHÈSE SUR LES PROJECTIONS CARTOGRAPHIQUES SIMPLES 1/6 TYPES DE PROJECTION Pour passer de la représentation en 3D de la terre (globe terrestre) à une représentation en 2D (la carte), on
A.Charbonnel SYNTHÈSE SUR LES PROJECTIONS CARTOGRAPHIQUES SIMPLES 1/6 TYPES DE PROJECTION Pour passer de la représentation en 3D de la terre (globe terrestre) à une représentation en 2D (la carte), on
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL
 M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
M6 MOMENT CINÉTIQUE D UN POINT MATÉRIEL OBJECTIFS Jusqu à présent, nous avons rencontré deux méthodes pour obtenir l équation du mouvement d un point matériel : - l utilisation du P.F.D. - et celle du
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
Annexe commune aux séries ES, L et S : boîtes et quantiles
 Annexe commune aux séries ES, L et S : boîtes et quantiles Quantiles En statistique, pour toute série numérique de données à valeurs dans un intervalle I, on définit la fonction quantile Q, de [,1] dans
Annexe commune aux séries ES, L et S : boîtes et quantiles Quantiles En statistique, pour toute série numérique de données à valeurs dans un intervalle I, on définit la fonction quantile Q, de [,1] dans
Mathématiques financières
 Mathématiques financières Table des matières 1 Intérêt simple 1 1.1 Exercices........................................ 1 2 Intérêt composé 2 2.1 Taux nominal, taux périodique, taux réel.......................
Mathématiques financières Table des matières 1 Intérêt simple 1 1.1 Exercices........................................ 1 2 Intérêt composé 2 2.1 Taux nominal, taux périodique, taux réel.......................
AC AB. A B C x 1. x + 1. d où. Avec un calcul vu au lycée, on démontre que cette solution admet deux solutions dont une seule nous intéresse : x =
 LE NOMBRE D OR Présentation et calcul du nombre d or Euclide avait trouvé un moyen de partager en deu un segment selon en «etrême et moyenne raison» Soit un segment [AB]. Le partage d Euclide consiste
LE NOMBRE D OR Présentation et calcul du nombre d or Euclide avait trouvé un moyen de partager en deu un segment selon en «etrême et moyenne raison» Soit un segment [AB]. Le partage d Euclide consiste
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE
 COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE
 AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Manuel des bonnes pratiques avec CATIA V.5
 2009 Manuel des bonnes pratiques avec CATIA V.5 Pour aller plus loin dans la maîtrise de l outil CAO Ce document a pour objectif de donner des méthodologies et règles de travail qui permettent de mener
2009 Manuel des bonnes pratiques avec CATIA V.5 Pour aller plus loin dans la maîtrise de l outil CAO Ce document a pour objectif de donner des méthodologies et règles de travail qui permettent de mener
Propriétés électriques de la matière
 1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
1 Propriétés électriques de la matière La matière montre des propriétés électriques qui ont été observées depuis l antiquité. Nous allons distinguer les plus fondamentales de ces propriétés. 1 Propriétés
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
Erratum de MÉCANIQUE, 6ème édition. Introduction Page xxi (milieu de page) G = 6, 672 59 10 11 m 3 kg 1 s 2
 G = 6, 672 59 10 11 m 3 kg 1 s 2") Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
Introduction Page xxi (milieu de page) G = 6, 672 59 1 11 m 3 kg 1 s 2 Erratum de MÉCANIQUE, 6ème édition Page xxv (dernier tiers de page) le terme de Coriolis est supérieur à 1% du poids) Chapitre 1 Page
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F)
") PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
La géométrie du triangle III IV - V Cercles remarquables - Lieux géométriques - Relations métriques
 La géométrie du triangle III IV - V Cercles remarquables - Lieux géométriques - Relations métriques III. Cercles 1. Cercle d'euler 2. Droite d'euler 3. Théorème de Feuerbach 4. Milieux des segments joignant
La géométrie du triangle III IV - V Cercles remarquables - Lieux géométriques - Relations métriques III. Cercles 1. Cercle d'euler 2. Droite d'euler 3. Théorème de Feuerbach 4. Milieux des segments joignant
Bridages Renishaw Votre source unique de bridages pour la métrologie
 H-1000-0084-02-A Bridages Renishaw Votre source unique de bridages pour la métrologie Bridages pour MMT Bridages Vision Bridages Equator Bridages sur mesure Bridages Renishaw pour MMT Bridages modulaires
H-1000-0084-02-A Bridages Renishaw Votre source unique de bridages pour la métrologie Bridages pour MMT Bridages Vision Bridages Equator Bridages sur mesure Bridages Renishaw pour MMT Bridages modulaires
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre