Dossier pédagogique Robot Cycle 4, 4ème
|
|
|
- Nathalie Cartier
- il y a 9 ans
- Total affichages :
Transcription


1 Dossier pédagogique Robot Cycle 4, 4ème Plug Uino - Programmation d objets connectés Version 1.0 Septembre 2016
2 Cycle 4 quatrième 2x55 minutes Activité 1 Fiche prof TECHNO C1 pratiquer des démarches scientifiques et technologiques C4 Pratiquer des langages C1.3 Rechercher des solutions techniques à un problème posé, expliciter ses choix et les communiquer. C4.2 Appliquer les principes élémentaires de l algorithmique et du codage à la réalisation d un problème simple C1.2 Mesurer des grandeurs de manière directe ou indirecte. Cette activité a pour objectif d éveiller chez l élève la curiosité et d établir un protocole pour valiser des solutions. Dans un premier temps, on laisse les élèves réfléchir au problème posé. Un exercice sur mbloc leur permet de synthétiser leur connaissance. La résolution se fait en 2 étapes. Il faut amener l élève à la conclusion que mesurer la distance parcourue est la clé. La deuxième étape est de mesurer le temps de parcours de cette distance si les élèves proposent un chronomètre, c est suffisant pour leur donner la solution algorithmique qui est la temporisation (delay). On doit laisser aux élèves le temps nécessaire de la construction de l algorithme car il sera la base pour la réalisation du programme. Enfin, on réalisera en fin de projet, une revue de projet dans laquelle chaque équipe va présenter son projet en moins de 10mn, démonstration avec le robot incluse.
3 Cycle 4 quatrième 2x55 minutes Activité 1 Fiche élève TECHNO C1 pratiquer des démarches scientifiques et technologiques C4 Pratiquer des langages C1.3 Rechercher des solutions techniques à un problème posé, expliciter ses choix et les communiquer. C4.2 Appliquer les principes élémentaires de l algorithmique et du codage à la réalisation d un problème simple C1.2 Mesurer des grandeurs de manière directe ou indirecte. Comment mesurer la vitesse du Robot Plug Uino Objectifs : Convertir des vitesses cm/s en m/h Rechercher une solution pour déterminer la vitesse du robot. Communiquer cette solution à l aide d un outil de représentation. Coder, débugger, valider des solutions.





4 Je m interroge On cherche à calculer la vitesse du robot Plug Uino. Nous savons que la formule de calcul de la vitesse est :. L ultrason sera le composant essentiel pour nous aider à déterminer la distance séparant le robot Plug Uino d un obstacle. Le script sur ardublock traitera la vitesse de propagation du son et le temps mis par ces ultrasons pour mesurer une distance. On considère pour cette expérience que l obstacle est immobile et que l ultrason est fixé sur le robot Plug Uino. Comment mesurer la vitesse du Robot Plug Uino Robot Plug Uino en déplacement Obstacle fixe Télémètre ultrason Emetteur ultrason Récepteur ultrason Distance parcourue en cm

5 1. Rappeler rapidement la formule qui permet de calculer une vitesse. 2. Convertissez la vitesse 10 cm/s en m/h. 3. Appliquez votre solution en complétant le code ci-dessous dans mbloc 4. On cherche à déterminer les 2 vitesses que l on va assigner au robot. Déterminer une procédure pour calculer la vitesse V1 du robot. 5. Communiquer cette solution à l aide d un dessin graphique commenté. 6. Déterminer l algorithme qui déterminer la vitesse en m/h 7. Compléter le codage de la solution, puis valider votre solution par des tests. Ressources Robot vitesse V2 vitesse V1 Arrêt du moteur Angle du moteur droit Angle du moteur gauche

6 Programme à compléter
 Donc 1 m/h = = On applique tout simplement la")
7 Correction 1. La formule est : 2. On sait que : 1m = 100 centimètres 1 h = 60 x 60 = 3600 secondes (60 mn x60 s) Donc 1 m/h = = On applique tout simplement la règle de proportionnalité : 1 m/h m/s? m/h 10m/s? m/h = Donc vitesse en m/h = 3. Programme mbloc

8 4. et On programme le robot à la vitesse V1 par exemple. On mesure une première distance qui représentera la valeur référence D1. Télémètre ultrason Emetteur ultrason Récepteur ultrason Distance D1 2. On laisse passer une seconde. 3. On fait une deuxième mesure D2 Télémètre ultrason Emetteur ultrason Récepteur ultrason D1-D2 Distance D2 4. D1 D2 représente la distance parcourue en 1 seconde 5. La vitesse est alors V = (en cm/s) 6. On affiche alors directement V = D1 D2 7. On convertit V (cm/s) en m/h : V (m/h)= V(cm/s)x 8. Sur la deuxième ligne de l afficheur, on affiche la vitesse en m/h.
9 6. Algorithme de résolution du problème Créer les variables d1, d2, v et v Arrêter le robot. Avancer le robot. Mesurer d. Affecter d à d1. Attendre 1 seconde. Mesurer d. Affecter d à d2 Affecter d1-d2 à v Afficher v m/s Affecter (d1-d2) x 36 à v Afficher v m/h 7. Programme on cherche à déterminer deux vitesses en fonction des angles qu on rentre. Dans un premier temps on affectera aux angles Vg=92 et Vd=82 On trouve les deux valeurs affichées v=9cm/s et v =324m/h Avec vg=130 et vd=60 On trouve les deux valeurs affichées v=36cm/s et v =1296m/h ou 1,296km/h


10
11 Cycle 4 quatrième 2x55 minutes Activité 2 Fiche prof TECHNO C3 s approprier des outils et des méthodes C4 Pratiquer des langages C3.1 Exprimer sa pensée à l aide d outils de description adaptés : croquis, schémas C4.1, C4.2 Appliquer les principes élémentaires de l algorithmique et du codage à la réalisation d un problème simple. On approfondit la programmation séquentiel avec de la programmation ludique. L activité commence avec quelques rappels. On pourra pour les élèves qui éprouvent des difficultés pour remplir le deuxième tableau leur proposer un programme qui affiche en temps réel l état du suiveur de ligne. Le travail sur l algorithme a pour but de structurer les connaissances et de pousser l élève à décrire le comportement du robot selon les 4 cas. La carte mentale sera une aide précieuse pour la dernière partie qui est le codage, test et validation.
12 Cycle 4 quatrième 2x55 minutes Activité 2 Fiche prof TECHNO C3 s approprier des outils et des méthodes C4 Pratiquer des langages C3.1 Exprimer sa pensée à l aide d outils de description adaptés : croquis, schémas C4.1, C4.2 Appliquer les principes élémentaires de l algorithmique et du codage à la réalisation d un problème simple. Comment programmer le robot pour qu il suive la ligne noire? Objectifs : Décrire l état des moteurs suivant le mouvement du robot. Associer les états des capteurs au mouvement à effectuer. Exprimer et décrire sa pensée à l aide d outils. Coder, débugger, valider des solutions.




13 Je m interroge Les robots kiva d Amazon déplacent en permanence les étagères pesant jusqu à 340 kilos où sont stockés les produits à livrer. Grâce aux robots Kiva, un travail qui exigeait précédemment une heure et demie en moyenne, est à présent effectué en un petit quart d'heure. Ces machines, commandées par un système sophistiqué, sont guidées par des QR codes imprimés au sol. Comment programmer le robot pour qu il suive la ligne noire? 1. Dans le tableau préciser l état des moteurs suivant le mouvement du robot. avance recule tourne à droite tourne à gauche Etat du moteur droit Etat du moteur gauche
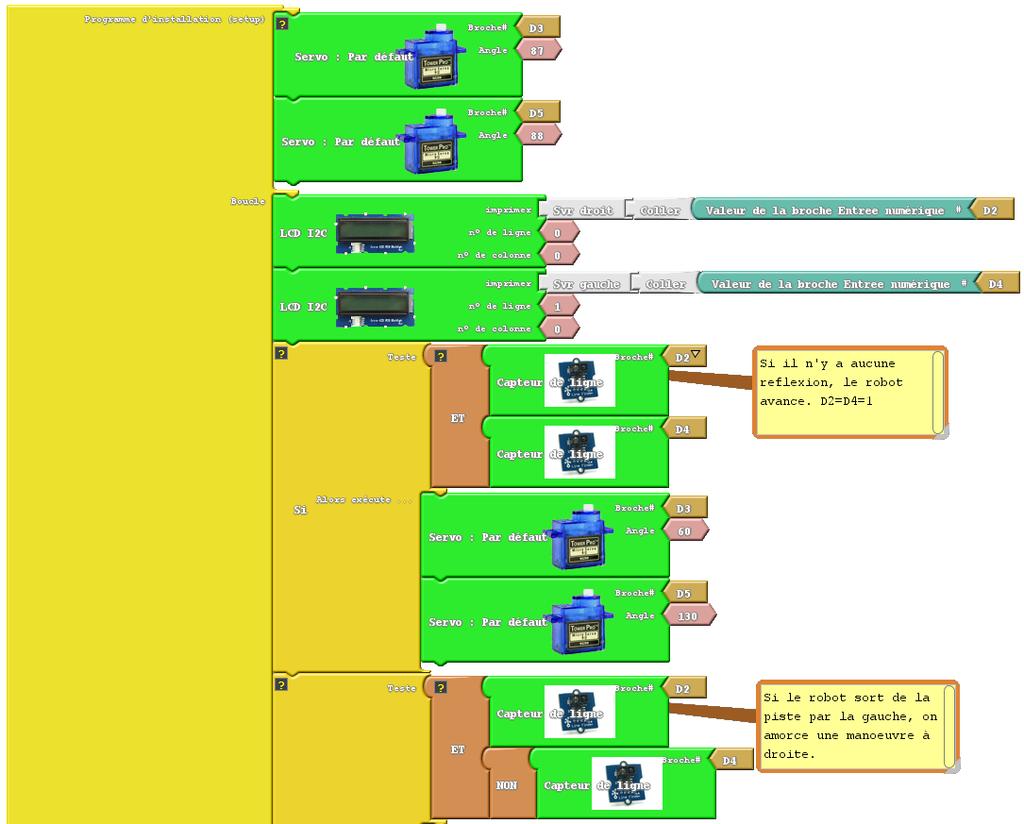
14 Exemple de parcours du Robot Plug uino. Si les 2 capteurs (gauche et droit) ne captent pas la ligne noire alors on engage une manœuvre de recul. Si les deux capteurs captent la ligne noire alors le robot avance. Capteur gauche Capteur droit Si le capteur droit ne capte la ligne noire, alors on tourne à gauche. Etat des suiveurs de ligne Capteur suiveur de ligne inactif. Capteur suiveur de ligne actif. Si le capteur gauche ne capte pas la ligne noire, alors on tourne à droite.
15 2. Suivant la position des capteurs suiveurs de ligne sur le schéma, indiquer le mouvement que le robot doit entamer pour rester ou regagner la bande noire. Mouvement du robot Suiveur de ligne droit Suiveur de ligne gauche 3. Proposer un algorithme afin que le robot suive la ligne noire. 4. Synthétiser dans une carte mentale les fonctions et sous-fonction du robot, composants électroniques ainsi que leurs numéros de broches. 5. Proposer un programme pour le robot suiveur de ligne. Ressources valeur des angles des servomoteurs suivant les mouvements avance recule tourne à droite tourne à gauche Arrêt du moteur Angle du moteur droit Angle du moteur gauche
16 Correction avance recule tourne à droite tourne à gauche Etat du moteur droit Vitesse avant Vitesse arrière Blocage du moteur Vitesse avant Etat du moteur gauche Vitesse avant Vitesse arrière Vitesse avant Blocage du moteur 2. Mouvement du robot Tourne à gauche Marche avant Tourne à droite Marche arrière Suiveur de ligne droit Suiveur de ligne gauche 3. Si les deux capteurs de ligne captent la ligne noire Alors le robot avance. Si le capteur droit capte la ligne noire et que le capteur gauche non. Alors le robot tourne à droite. Si le capteur gauche capte la ligne noire et que le capteur droit non Alors le robot tourne à gauche. Si les deux capteurs de ligne ne captent pas la ligne noire Alors le robot recule.

17 4. 5.

18
19 Cycle 4 quatrième 55 minutes Activité 3 Fiche prof TECHNO C5. Mobiliser des outils numériques C4 Pratiquer des langages C5.4 Piloter un système connecté localement ou à distance C4.2 Appliquer les principes élémentaires de l algorithmique et du codage à la réalisation d un problème simple Cette activité est orienté projet, on attend des élèves qu ils mobilisent des outils numériques pour coder ou de représentation pour présenter des choix de solutions à l aide xmind. Les ressources sont complètes et ne nécessitent pas d aide particulière à l élève. Ils connaissent assez bien le fonctionnement du servomoteur à rotation continue. Ce qui ne devrait pas poser de problèmes. La carte mentale devrait pour chaque équipe être la référence pour construire leur algorithme. On doit laisser aux élèves le temps nécessaire de la construction de l algorithme car il sera la base pour la réalisation du programme. Enfin, on réalisera en fin de projet, une revue de projet dans laquelle chaque équipe va présenter son projet en moins de 10mn, démonstration avec le robot incluse.
20 Cycle 4 quatrième 55 minutes Activité 3 Fiche élève TECHNO C5. Mobiliser des outils numériques C4 Pratiquer des langages C5.4 Piloter un système connecté localement ou à distance C4.2 Appliquer les principes élémentaires de l algorithmique et du codage à la réalisation d un problème simple Objectifs : Comment piloter un objet à distance? Associer des touches à des mouvements. Affecter des vitesses au mouvement avancer. Exprimer et décrire sa pensée à l aide d outils. Coder, débugger, valider des solutions.





21 Je m interroge Japon : Tsunami 2011 L épisode tragique du Fukushima où un réacteur nucléaire avait explosé a révélé la nécessité d utiliser des robots pour intervenir à des endroits inaccessibles ou à forts rayonnements. Equipé d une caméra, le robot est surtout utilisé comme éclaireur, sa taille lui permet de se faufiler à des endroits inaccessibles et aide déterminer les zones où il y a lieu d effectuer des travaux. Grâce à une liaison sans fil, L opérateur pilote le robot à distance et reste protégé. Bluetooth permet de recevoir des informations d une télécommande si on lui associe un module récepteur. On peut envisager de piloter à distance les déplacements du robot et d associer certaines touches à des vitesses.

22 1. Associer les touches de la télécommande de votre choix aux déplacements du robot Touches télécommande Déplacement Avancer Reculer Tourner à droite Tourner à gauche Arrêt Choix vitesse 1 Choix vitesse 2 2. A partir de l étiquette des touches ci-dessous, associer les touches choisies à leur code interne. Touches télécommande Code interne

23 3. Expliquer et tester sur ardublock, le programme suivant : 4. Proposer un algorithme du pilotage du robot à distance. 5. Synthétiser dans une carte qui détaille pour chaque touche, les actions à réaliser. 6. Compléter le programme du pilotage du robot à distance. Ressources angles de mouvements avance V2 avance V1 recule tourne à droite tourne à gauche Arrêt du moteur Angle du moteur droit Angle du moteur gauche

24 Programme à compléter
25 Correction 1. On fait le choix le plus ergonomique. Touches télécommande Déplacement Avancer Reculer Tourner à droite Tourner à gauche Arrêt Choix vitesse 1 Choix vitesse 2 2. Touches télécommande Code interne
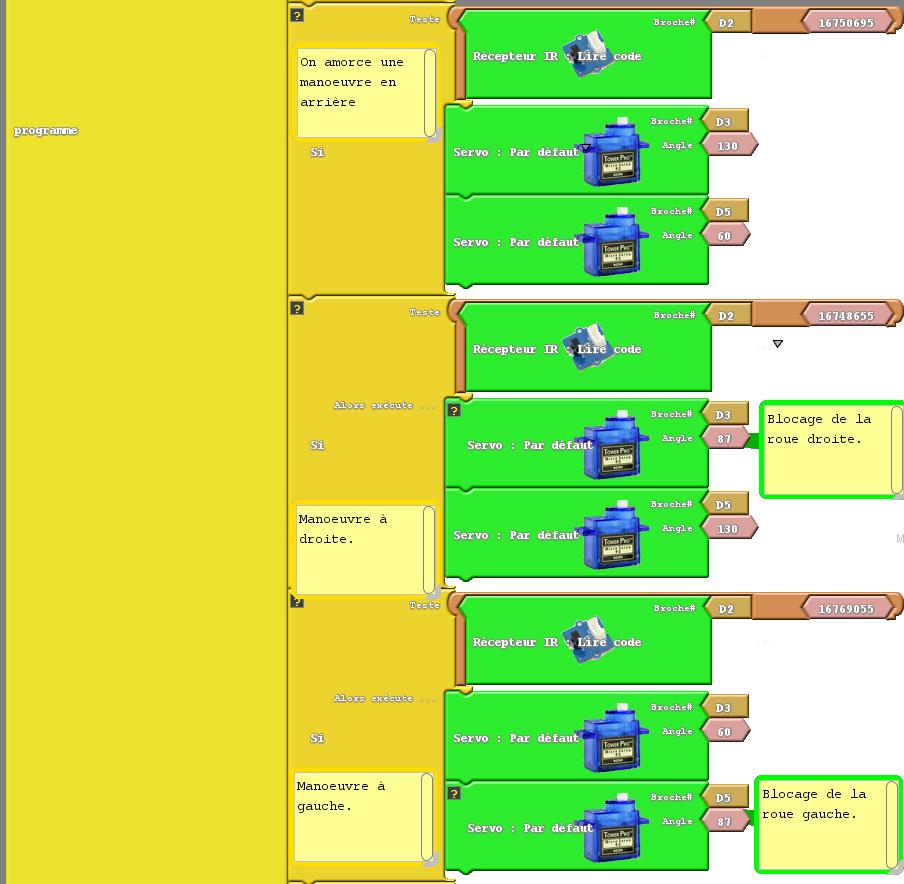
26 3. Le programme comprend 2 boucles, lorsqu une touche est appuyée sur la télécommande infrarouge. La télécommande envoie un signal lumineux. Le récepteur infrarouge convertit ensuite le flux lumineux en signal électrique. Le Plug uino va traiter ensuite ces signaux électriques et leur attribuer une valeur numérique. Le programme s exécute en boucle en attendant un appui sur les touches Avance droite et Retour gauche. Si le signal émis par la télécommande correspond à Alors on allume la led connectée à la broche 3. Si le signal émis par la télécommande correspond à Alors on allume la led connectée à la broche On déclare les variables VG et VD. Si la touche appuyée correspond à (touche 1) Alors on affecte à VG= 92 et VD=82 Si la touche appuyée correspond à (touche 2) Alors on affecte à VG=130 et VD=60 Si la touche appuyée correspond à (touche Plus) Alors le robot avance Si la touche appuyée correspond à (touche moins) Alors le robot recule Si la touche appuyée correspond à (Touche Avance, droite) Alors le robot tourne à droite Si la touche appuyée correspond à (touche retour, gauche) Alors le robot tourne à gauche Si la touche appuyée correspond à (touche lecture) Alors le robot s arrête

27 5.Carte mentale

28 6.

29 suite
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Indications pour une progression au CM1 et au CM2
 Indications pour une progression au CM1 et au CM2 Objectif 1 Construire et utiliser de nouveaux nombres, plus précis que les entiers naturels pour mesurer les grandeurs continues. Introduction : Découvrir
Indications pour une progression au CM1 et au CM2 Objectif 1 Construire et utiliser de nouveaux nombres, plus précis que les entiers naturels pour mesurer les grandeurs continues. Introduction : Découvrir
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
www.habefast.ch [email protected] Agence web en Suisse romande CH-1260 Nyon 022 362 25 70
 1 By Agence web en Suisse romande 2 Qu est ce qu est le SEO? Le référencement naturel ou SEO (Search Engine Optimisation) est une pratique qui, comme son nom l indique, permet d optimiser un site web pour
1 By Agence web en Suisse romande 2 Qu est ce qu est le SEO? Le référencement naturel ou SEO (Search Engine Optimisation) est une pratique qui, comme son nom l indique, permet d optimiser un site web pour
Séance du jeudi 22 novembre 2012 (13h30 16h30)
") Séance du jeudi 22 novembre 2012 (13h30 16h30) Lieu : salle de sciences physiques, lycée français de Luanda Public : entre 6 et 12 élèves de 3eme, 2de et 1ereS (un des élèves ayant amené son propre robot
Séance du jeudi 22 novembre 2012 (13h30 16h30) Lieu : salle de sciences physiques, lycée français de Luanda Public : entre 6 et 12 élèves de 3eme, 2de et 1ereS (un des élèves ayant amené son propre robot
PLAN D ATHLETISATION PROTOCOLES D EVALUATION DES QUALITES PHYSIQUES DES JOUEURS INTERNATIONAUX
 PLAN D ATHLETISATION PROTOCOLES D EVALUATION DES QUALITES PHYSIQUES DES JOUEURS INTERNATIONAUX TEST NUMERO 1 (1/3) Nom : Test Luc LEGER Navette (20m) Objectifs : Mesure de la VMA (Vitesse maximal aérobie)
PLAN D ATHLETISATION PROTOCOLES D EVALUATION DES QUALITES PHYSIQUES DES JOUEURS INTERNATIONAUX TEST NUMERO 1 (1/3) Nom : Test Luc LEGER Navette (20m) Objectifs : Mesure de la VMA (Vitesse maximal aérobie)
Evaluation. Partie 1. 1-2- Quelles sont les possibilités offertes par cette caméra d un point de vue utilisation?
 Nom:... Prénom:... Evaluation Année scolaire 20-20 Classe :... Date :... Etude d une installation de vidéosurveillance Ce devoir est constitué de deux parties. Dans la première nous réfléchirons sur l
Nom:... Prénom:... Evaluation Année scolaire 20-20 Classe :... Date :... Etude d une installation de vidéosurveillance Ce devoir est constitué de deux parties. Dans la première nous réfléchirons sur l
Organigramme / Algorigramme Dossier élève 1 SI
 Organigramme / Algorigramme Dossier élève 1 SI CI 10, I11 ; CI 11, I10 C24 Algorithmique 8 février 2009 (13:47) 1. Introduction Un organigramme (ou algorigramme, lorsqu il est plus particulièrement appliqué
Organigramme / Algorigramme Dossier élève 1 SI CI 10, I11 ; CI 11, I10 C24 Algorithmique 8 février 2009 (13:47) 1. Introduction Un organigramme (ou algorigramme, lorsqu il est plus particulièrement appliqué
GUIDE DU TUTEUR ACCUEIL D UN ETUDIANT EN BTS MUC. Management des Unités Commerciales. Stage de 1ère année
 GUIDE DU TUTEUR Ce guide est complété par le tuteur durant la première année de BTS. Une copie doit être fournie au professeur et à l étudiant ACCUEIL D UN ETUDIANT EN BTS MUC Management des Unités Commerciales
GUIDE DU TUTEUR Ce guide est complété par le tuteur durant la première année de BTS. Une copie doit être fournie au professeur et à l étudiant ACCUEIL D UN ETUDIANT EN BTS MUC Management des Unités Commerciales
Routage AODV. Languignon - Mathe - Palancher - Pierdet - Robache. 20 décembre 2007. Une implémentation de la RFC3561
 20 décembre 2007 Une implémentation de la RFC3561 Présentation du groupe - plan Présentation Cahier des charges 1 CDC 2 Archi 3 Algorithme 4 Mini Appli de base Implémentation dans AODV 5 Difficultées rencontrées
20 décembre 2007 Une implémentation de la RFC3561 Présentation du groupe - plan Présentation Cahier des charges 1 CDC 2 Archi 3 Algorithme 4 Mini Appli de base Implémentation dans AODV 5 Difficultées rencontrées
... Questionnaire...
 ...Préambule au questionnaire... Lexique PEDT : Projet EDucatif Territorial Le PEDT a pour objectif de mobiliser toutes les ressources d un territoire afin de garantir la continuité éducative entre les
...Préambule au questionnaire... Lexique PEDT : Projet EDucatif Territorial Le PEDT a pour objectif de mobiliser toutes les ressources d un territoire afin de garantir la continuité éducative entre les
Dossier d'étude technique
 Centre national de la recherche scientifique Direction des systèmes d'information REFERENTIEL QUALITE Guide méthodologique Dossier d'étude technique Référence : CNRS/DSI/conduite-projet/developpement/technique/guide-etude-technique
Centre national de la recherche scientifique Direction des systèmes d'information REFERENTIEL QUALITE Guide méthodologique Dossier d'étude technique Référence : CNRS/DSI/conduite-projet/developpement/technique/guide-etude-technique
BES WEBDEVELOPER ACTIVITÉ RÔLE
 BES WEBDEVELOPER ACTIVITÉ Le web developer participe aux activités concernant la conception, la réalisation, la mise à jour, la maintenance et l évolution d applications internet/intranet statiques et
BES WEBDEVELOPER ACTIVITÉ Le web developer participe aux activités concernant la conception, la réalisation, la mise à jour, la maintenance et l évolution d applications internet/intranet statiques et
NXT Guide de mise en route. Rob Widger
 NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
NXT Guide de mise en route Rob Widger Guide de mise en route NXT Contenu Introduction... 2 1. Premiers pas... 3 2. Installation du matériel... 4 3. Utilisation du NXT sans logiciel... 5 4. Le logiciel
SYSTEME D AMBIANCE LUMINEUSE: INTERÊT DANS LE SCANNER DE LA MERE ET DE L ENFANT. JFR 2008 Hôpital Robert Debré - Imagerie Pédiatrique
 SYSTEME D AMBIANCE LUMINEUSE: INTERÊT DANS LE SCANNER DE LA MERE ET DE L ENFANT NOS PATIENTS Futures mamans : Pelvimétries au terme > 35 SA supportent mal le décubitus dorsal inquiètes Enfants : Nouveaux-
SYSTEME D AMBIANCE LUMINEUSE: INTERÊT DANS LE SCANNER DE LA MERE ET DE L ENFANT NOS PATIENTS Futures mamans : Pelvimétries au terme > 35 SA supportent mal le décubitus dorsal inquiètes Enfants : Nouveaux-
M06/5/COMSC/SP1/FRE/TZ0/XX INFORMATIQUE NIVEAU MOYEN ÉPREUVE 1. Mardi 2 mai 2006 (après-midi) 1 heure 30 minutes INSTRUCTIONS DESTINÉES AUX CANDIDATS
 1 heure 30 minutes INSTRUCTIONS DESTINÉES AUX CANDIDATS") IB INFORMATIQUE NIVEAU MOYEN ÉPREUVE 1 DIPLOMA PROGRAMME PROGRAMME DU DIPLÔME DU BI PROGRAMA DEL DIPLOMA DEL BI M06/5/COMSC/SP1/FRE/TZ0/XX 22067017 Mardi 2 mai 2006 (après-midi) 1 heure 30 minutes INSTRUCTIONS
IB INFORMATIQUE NIVEAU MOYEN ÉPREUVE 1 DIPLOMA PROGRAMME PROGRAMME DU DIPLÔME DU BI PROGRAMA DEL DIPLOMA DEL BI M06/5/COMSC/SP1/FRE/TZ0/XX 22067017 Mardi 2 mai 2006 (après-midi) 1 heure 30 minutes INSTRUCTIONS
Accessibilité ERP Guide des obligations liées à l accessibilité des personnes handicapées dans les bâtiments ERP existants.*
 Accessibilité ERP Guide des obligations liées à l accessibilité des personnes handicapées dans les bâtiments ERP existants.* *Application de l arrêté du 21 mars 2007, de l arrêté du 1er août 2006 et de
Accessibilité ERP Guide des obligations liées à l accessibilité des personnes handicapées dans les bâtiments ERP existants.* *Application de l arrêté du 21 mars 2007, de l arrêté du 1er août 2006 et de
Environnement Architecture de controle. Décisions
 Chapitre 1 Introduction 1.1 Robot Mobile Il existe diverses définitions du terme robot, mais elles tournent en général autour de celle-ci : Un robot est une machine équipée de capacités de perception,
Chapitre 1 Introduction 1.1 Robot Mobile Il existe diverses définitions du terme robot, mais elles tournent en général autour de celle-ci : Un robot est une machine équipée de capacités de perception,
Commune X. Quelles nouvelles exigences pour l accessibilité de la voirie? Les prescriptions techniques de l arrêté du 15 janvier 2007
 Commune X Quelles nouvelles exigences pour l accessibilité de la voirie? Les prescriptions techniques de l arrêté du 15 janvier 2007 Centre d'études Techniques de l'équipement Méditerranée Les cheminements
Commune X Quelles nouvelles exigences pour l accessibilité de la voirie? Les prescriptions techniques de l arrêté du 15 janvier 2007 Centre d'études Techniques de l'équipement Méditerranée Les cheminements
La NP-complétude. Johanne Cohen. PRISM/CNRS, Versailles, France.
 La NP-complétude Johanne Cohen PRISM/CNRS, Versailles, France. Références 1. Algorithm Design, Jon Kleinberg, Eva Tardos, Addison-Wesley, 2006. 2. Computers and Intractability : A Guide to the Theory of
La NP-complétude Johanne Cohen PRISM/CNRS, Versailles, France. Références 1. Algorithm Design, Jon Kleinberg, Eva Tardos, Addison-Wesley, 2006. 2. Computers and Intractability : A Guide to the Theory of
Perception et utilisation des solutions de radio-identification (RFID) dans les entreprises françaises
 dans les entreprises françaises") Perception et utilisation des solutions de radio-identification (RFID) dans les entreprises françaises Synthèse de l enquête PricewaterhouseCoopers Mars 2010 Sommaire Page 1 Introduction 1 2 Description
Perception et utilisation des solutions de radio-identification (RFID) dans les entreprises françaises Synthèse de l enquête PricewaterhouseCoopers Mars 2010 Sommaire Page 1 Introduction 1 2 Description
«Dire et écrire» pour réaliser une composition en travail collaboratif en géographie. Agnès Dullin, lycée J. Racine 20 rue du Rocher, 75008 Paris
 «Dire et écrire» pour réaliser une composition en travail collaboratif en géographie Agnès Dullin, lycée J. Racine 20 rue du Rocher, 75008 Paris OBJECTIFS 1- Niveau et insertion dans la programmation 2-
«Dire et écrire» pour réaliser une composition en travail collaboratif en géographie Agnès Dullin, lycée J. Racine 20 rue du Rocher, 75008 Paris OBJECTIFS 1- Niveau et insertion dans la programmation 2-
Robot de Téléprésence
 Robot de Téléprésence Projet innovant BISCH Simon / FOURURE Florian / VICENTE VALVERDE César 12 Sommaire Introduction... 3 Description du projet... 4 Logiciel de vidéoconférence : Linphone... 5 La connexion...
Robot de Téléprésence Projet innovant BISCH Simon / FOURURE Florian / VICENTE VALVERDE César 12 Sommaire Introduction... 3 Description du projet... 4 Logiciel de vidéoconférence : Linphone... 5 La connexion...
Traceur GPS Antivol. Le traceur est conforme aux normes européennes 95/56 E27
 Traceur GPS Antivol Le traceur est conforme aux normes européennes 95/56 E27 Nous vous remercions d avoir choisi un produit de la gamme ATEXYS pour votre véhicule. Nous vous conseillons de lire attentivement
Traceur GPS Antivol Le traceur est conforme aux normes européennes 95/56 E27 Nous vous remercions d avoir choisi un produit de la gamme ATEXYS pour votre véhicule. Nous vous conseillons de lire attentivement
SEO On-page. Avez-vous mis toutes les chances de votre côté pour le référencement de votre site?
 SEO On-page Avez-vous mis toutes les chances de votre côté pour le référencement de votre site? I. Introduction... p.2 II. Optimisation on-page vs off-page... p.3 III. Les éléments importants de vos pages...
SEO On-page Avez-vous mis toutes les chances de votre côté pour le référencement de votre site? I. Introduction... p.2 II. Optimisation on-page vs off-page... p.3 III. Les éléments importants de vos pages...
Projet de programme pour l enseignement d exploration de la classe de 2 nde : Informatique et création numérique
 Projet de programme pour l enseignement d exploration de la classe de 2 nde : Informatique et création numérique 19 mai 2015 Préambule L informatique est tout à la fois une science et une technologie qui
Projet de programme pour l enseignement d exploration de la classe de 2 nde : Informatique et création numérique 19 mai 2015 Préambule L informatique est tout à la fois une science et une technologie qui
Comprendre l Univers grâce aux messages de la lumière
 Seconde / P4 Comprendre l Univers grâce aux messages de la lumière 1/ EXPLORATION DE L UNIVERS Dans notre environnement quotidien, les dimensions, les distances sont à l échelle humaine : quelques mètres,
Seconde / P4 Comprendre l Univers grâce aux messages de la lumière 1/ EXPLORATION DE L UNIVERS Dans notre environnement quotidien, les dimensions, les distances sont à l échelle humaine : quelques mètres,
Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité. * Le meilleur de l emballage
 : Détection visuelle d objets et inspection qualité. * Le meilleur de l emballage") Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité * * Le meilleur de l emballage MVS Composants Domaines d application Données techniques Automatisation efficace de la production
Multivac Vision System (MVS) : Détection visuelle d objets et inspection qualité * * Le meilleur de l emballage MVS Composants Domaines d application Données techniques Automatisation efficace de la production
Les fonction affines
 Les fonction affines EXERCICE 1 : Voir le cours EXERCICE 2 : Optimisation 1) Traduire, pour une semaine de location, chaque formule par une écriture de la forme (où x désigne le nombre de kilomètres parcourus
Les fonction affines EXERCICE 1 : Voir le cours EXERCICE 2 : Optimisation 1) Traduire, pour une semaine de location, chaque formule par une écriture de la forme (où x désigne le nombre de kilomètres parcourus
Des ondes ultrasonores pour explorer le corps humain : l échographie
 Seconde Thème santé Activité n 3(expérimentale) Des ondes ultrasonores pour explorer le corps humain : l échographie Connaissances Compétences - Pratiquer une démarche expérimentale pour comprendre le
Seconde Thème santé Activité n 3(expérimentale) Des ondes ultrasonores pour explorer le corps humain : l échographie Connaissances Compétences - Pratiquer une démarche expérimentale pour comprendre le
Spip 2. Premiers pas pour créer son site web. Anne-Laure Quatravaux Dominique Quatravaux. Avec la contribution de Sandrine Burriel
 Anne-Laure Quatravaux Dominique Quatravaux Spip 2 Premiers pas pour créer son site web Avec la contribution de Sandrine Burriel Groupe Eyrolles, 2009, ISBN : 978-2-212-12502-3 Pourquoi choisir Spip? Vous
Anne-Laure Quatravaux Dominique Quatravaux Spip 2 Premiers pas pour créer son site web Avec la contribution de Sandrine Burriel Groupe Eyrolles, 2009, ISBN : 978-2-212-12502-3 Pourquoi choisir Spip? Vous
Logiciel Libre Cours 3 Fondements: Génie Logiciel
 Logiciel Libre Cours 3 Fondements: Génie Logiciel Stefano Zacchiroli [email protected] Laboratoire PPS, Université Paris Diderot 2013 2014 URL http://upsilon.cc/zack/teaching/1314/freesoftware/
Logiciel Libre Cours 3 Fondements: Génie Logiciel Stefano Zacchiroli [email protected] Laboratoire PPS, Université Paris Diderot 2013 2014 URL http://upsilon.cc/zack/teaching/1314/freesoftware/
S entraîner au calcul mental
 E F C I - R E H S E S O S A PHOTOCOPIER S R U C Une collection dirigée par Jean-Luc Caron S entraîner au calcul mental CM Jean-François Quilfen Illustrations : Julie Olivier Sommaire Introduction au calcul
E F C I - R E H S E S O S A PHOTOCOPIER S R U C Une collection dirigée par Jean-Luc Caron S entraîner au calcul mental CM Jean-François Quilfen Illustrations : Julie Olivier Sommaire Introduction au calcul
BeSpoon et l homme Connecté
 BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
BeSpoon et l homme Connecté Paris 25 et 26 Mars BeSpoon est une société «Fabless» qui a développé en collaboration avec le CEA-Leti un composant IR-UWB (Impulse Radio Ultra Wide Band) dédié à la localisation
 ACTIVTE N 2 CONTRAT D ACTIVITE NIVEAU 6 ème Objets techniques Matériaux Energies Evolution objets techniques Réalisation T.I.C DECOUVERTE DU POSTE INFORMATIQUE PRESENTATION DE L ACTIVITE Cette activité
ACTIVTE N 2 CONTRAT D ACTIVITE NIVEAU 6 ème Objets techniques Matériaux Energies Evolution objets techniques Réalisation T.I.C DECOUVERTE DU POSTE INFORMATIQUE PRESENTATION DE L ACTIVITE Cette activité
Manuel d utilisation 26 juin 2011. 1 Tâche à effectuer : écrire un algorithme 2
 éducalgo Manuel d utilisation 26 juin 2011 Table des matières 1 Tâche à effectuer : écrire un algorithme 2 2 Comment écrire un algorithme? 3 2.1 Avec quoi écrit-on? Avec les boutons d écriture........
éducalgo Manuel d utilisation 26 juin 2011 Table des matières 1 Tâche à effectuer : écrire un algorithme 2 2 Comment écrire un algorithme? 3 2.1 Avec quoi écrit-on? Avec les boutons d écriture........
BALISE GPS. Modèle EOLE. MANUEL INSTALLATEUR Version 3.4 GPS+GSM+SMS/GPRS
 BALISE GPS GPS+GSM+SMS/GPRS Modèle EOLE MANUEL INSTALLATEUR Version 3.4 Vous venez de faire l acquisition de notre balise EOLE et nous vous remercions de votre confiance. EOLE est une balise utilisant
BALISE GPS GPS+GSM+SMS/GPRS Modèle EOLE MANUEL INSTALLATEUR Version 3.4 Vous venez de faire l acquisition de notre balise EOLE et nous vous remercions de votre confiance. EOLE est une balise utilisant
Travaux pratiques. Compression en codage de Huffman. 1.3. Organisation d un projet de programmation
 Université de Savoie Module ETRS711 Travaux pratiques Compression en codage de Huffman 1. Organisation du projet 1.1. Objectifs Le but de ce projet est d'écrire un programme permettant de compresser des
Université de Savoie Module ETRS711 Travaux pratiques Compression en codage de Huffman 1. Organisation du projet 1.1. Objectifs Le but de ce projet est d'écrire un programme permettant de compresser des
Ajustement. Titre l environnement normatif
 Ajustement de Titre l environnement normatif Comité de pilotage Ad AP du 14 janvier 2015 Nantes Présenté par la délégation ministérielle à l accessibilité Eric Heyrman Ministère de l'écologie, du Développement
Ajustement de Titre l environnement normatif Comité de pilotage Ad AP du 14 janvier 2015 Nantes Présenté par la délégation ministérielle à l accessibilité Eric Heyrman Ministère de l'écologie, du Développement
Projet Robot Centaure
 Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
Projet Robot Centaure Année 2013-2014 IMA4 S8 Étudiants : Clément TACHÉ Liying WANG Enseignants : Robert Litwak Xiavier Redon Table des matières : Remerciements Introduction Présentation et état des lieux
CULTe Le samedi 9 février2008 à 15h. Conf 1 : WIFI, les bases
 CULTe Le samedi 9 février2008 à 15h Conf 1 : WIFI, les bases 1) Principes de fonctionnement (antennes, fréquences, emetteurs/recepteurs, point d'accés) a) Les grandes classes de fréquences HF, 300 Khz
CULTe Le samedi 9 février2008 à 15h Conf 1 : WIFI, les bases 1) Principes de fonctionnement (antennes, fréquences, emetteurs/recepteurs, point d'accés) a) Les grandes classes de fréquences HF, 300 Khz
Gestion et travail en autonomie. Rallye auto nomie
 Gestion et travail en autonomie Rallye auto nomie Voilà plusieurs années que je propose du travail en autonomie aux élèves mais sans moyen de : - savoir rapidement où chacun se situe par rapport aux différentes
Gestion et travail en autonomie Rallye auto nomie Voilà plusieurs années que je propose du travail en autonomie aux élèves mais sans moyen de : - savoir rapidement où chacun se situe par rapport aux différentes
Jardinage. obligatoire. claquez des doigts. Jardinage. détente. Pour tondre,
 Jardinage obligatoire. Pour tondre, claquez des doigts. La nouvelle tondeuse robot Indego Connect se commande à distance grâce à vos appareils mobiles et tablettes, ce qui en fait une solution de jardinage
Jardinage obligatoire. Pour tondre, claquez des doigts. La nouvelle tondeuse robot Indego Connect se commande à distance grâce à vos appareils mobiles et tablettes, ce qui en fait une solution de jardinage
Baccalauréat Professionnel. Microtechniques. Session 2012 DOSSIER TECHNIQUE (DT)
") Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
Baccalauréat Professionnel Microtechniques Session 2012 E2 - EPREUVE DE TECHNOLOGIE Préparation d une intervention microtechnique DOSSIER TECHNIQUE (DT) Session : 2012 Dossier Technique Page 1 sur 8 A
La réforme Accessibilité du cadre bâti des ERP : L ajustement de l environnement normatif
 La réforme Accessibilité du cadre bâti des ERP : L ajustement de l environnement normatif Rencontre avec les collectivités Février 2015 Direction Départementale des Territoires et de la Mer de la Seine-Maritime
La réforme Accessibilité du cadre bâti des ERP : L ajustement de l environnement normatif Rencontre avec les collectivités Février 2015 Direction Départementale des Territoires et de la Mer de la Seine-Maritime
TP Protocoles SMTP et POP3 avec Pratiquer l algorithmique
 TP Protocoles SMTP et POP3 avec Pratiquer l algorithmique Introduction : Les protocoles SMTP et POP3 sont deux protocoles utilisés par la messagerie électronique (mail). Leur mise en œuvre étant simple,
TP Protocoles SMTP et POP3 avec Pratiquer l algorithmique Introduction : Les protocoles SMTP et POP3 sont deux protocoles utilisés par la messagerie électronique (mail). Leur mise en œuvre étant simple,
Système d alarme sans fil GSM / SMS / RFID. www.camshop.fr
 Système d alarme sans fil GSM / SMS / RFID Caractéristiques Panneau de contrôle Reconnait jusqu à 10 télécommandes Peut être connectée jusqu à 50 capteurs sans fil (contacts porte / fenêtre, radars ) Peut
Système d alarme sans fil GSM / SMS / RFID Caractéristiques Panneau de contrôle Reconnait jusqu à 10 télécommandes Peut être connectée jusqu à 50 capteurs sans fil (contacts porte / fenêtre, radars ) Peut
Principes de base d'une alarme Anti intrusion
 Principes de base d'une alarme Anti intrusion 1 Présentation Ce cours a pour but de vous apprendre les principes de base d'une alarme. Toutes les alarmes aussi sophistiquées soit elles utilisent ces principes.
Principes de base d'une alarme Anti intrusion 1 Présentation Ce cours a pour but de vous apprendre les principes de base d'une alarme. Toutes les alarmes aussi sophistiquées soit elles utilisent ces principes.
OPTION SCIENCES BELLE-ISLE-EN-TERRE
 Serge Combet Professeur Mathématiques Collège de Belle-Isle-En-Terre OPTION SCIENCES BELLE-ISLE-EN-TERRE 2011-2012 Mathématiques & Informatique Sommaire I. Introduction... 5 II. Choix des logiciels...
Serge Combet Professeur Mathématiques Collège de Belle-Isle-En-Terre OPTION SCIENCES BELLE-ISLE-EN-TERRE 2011-2012 Mathématiques & Informatique Sommaire I. Introduction... 5 II. Choix des logiciels...
TUTORIEL Qualit Eval. Introduction :
 TUTORIEL Qualit Eval Introduction : Qualit Eval est à la fois un logiciel et un référentiel d évaluation de la qualité des prestations en établissements pour Personnes Agées. Notre outil a été spécifiquement
TUTORIEL Qualit Eval Introduction : Qualit Eval est à la fois un logiciel et un référentiel d évaluation de la qualité des prestations en établissements pour Personnes Agées. Notre outil a été spécifiquement
Centrales d alarme incendie - SALVENA
 Centrales d alarme incendie - SALVENA Guide d installation et d utilisation Réf. 643 010/011 Mai 2004 N4065491/00 Sommaire Présentation Contenu de l emballage...3 Description de la face avant...4 Organisation
Centrales d alarme incendie - SALVENA Guide d installation et d utilisation Réf. 643 010/011 Mai 2004 N4065491/00 Sommaire Présentation Contenu de l emballage...3 Description de la face avant...4 Organisation
Notice d installation sur le véhicule
 Boîtier TACHYCOMGPRS Système de transfert automatique et à distance des données issues des chronotachygraphes numériques (Fichiers au format réglementaire DDD) Notice d installation sur le véhicule Antenne
Boîtier TACHYCOMGPRS Système de transfert automatique et à distance des données issues des chronotachygraphes numériques (Fichiers au format réglementaire DDD) Notice d installation sur le véhicule Antenne
Les Cheminements piétons
 Les Cheminements piétons 2 Les cheminements Le cheminement usuel doit être le plus court possible. Il lie entre eux tous les maillons de la vie sociale. Domicile Services publics Écoles Transports Travail
Les Cheminements piétons 2 Les cheminements Le cheminement usuel doit être le plus court possible. Il lie entre eux tous les maillons de la vie sociale. Domicile Services publics Écoles Transports Travail
LES OUTILS D ALIMENTATION DU REFERENTIEL DE DB-MAIN
 LES OUTILS D ALIMENTATION DU REFERENTIEL DE DB-MAIN Les contenues de ce document sont la propriété exclusive de la société REVER. Ils ne sont transmis qu à titre d information et ne peuvent en aucun cas
LES OUTILS D ALIMENTATION DU REFERENTIEL DE DB-MAIN Les contenues de ce document sont la propriété exclusive de la société REVER. Ils ne sont transmis qu à titre d information et ne peuvent en aucun cas
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Pourquoi l apprentissage?
 Pourquoi l apprentissage? Les SE sont basés sur la possibilité d extraire la connaissance d un expert sous forme de règles. Dépend fortement de la capacité à extraire et formaliser ces connaissances. Apprentissage
Pourquoi l apprentissage? Les SE sont basés sur la possibilité d extraire la connaissance d un expert sous forme de règles. Dépend fortement de la capacité à extraire et formaliser ces connaissances. Apprentissage
Unix/Linux I. 1 ere année DUT. Université marne la vallée
 Unix/Linux I 1 ere année DUT Université marne la vallée 1 Introduction 2 Fonctions et spécifité d Unix Architecture 3 4 5 Fichier Unix Arborescence de fichiers Quelques commandes sur les fichiers Chemins
Unix/Linux I 1 ere année DUT Université marne la vallée 1 Introduction 2 Fonctions et spécifité d Unix Architecture 3 4 5 Fichier Unix Arborescence de fichiers Quelques commandes sur les fichiers Chemins
Systèmes de transmission
 Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Systèmes de transmission Conception d une transmission série FABRE Maxime 2012 Introduction La transmission de données désigne le transport de quelque sorte d'information que ce soit, d'un endroit à un
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
AP1.1 : Montages électroniques élémentaires. Électricité et électronique
 STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
Cours Informatique Master STEP
 Cours Informatique Master STEP Bases de la programmation: Compilateurs/logiciels Algorithmique et structure d'un programme Programmation en langage structuré (Fortran 90) Variables, expressions, instructions
Cours Informatique Master STEP Bases de la programmation: Compilateurs/logiciels Algorithmique et structure d'un programme Programmation en langage structuré (Fortran 90) Variables, expressions, instructions
FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI
 : 0033 (0)169922672 : 0033 (0)169922674 : www.sordalab.com @ : [email protected] FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI Fourche optique numérique Réf. BEESPI Page 1 sur 5 1. MESURES DE PRECAUTION Tenir
: 0033 (0)169922672 : 0033 (0)169922674 : www.sordalab.com @ : [email protected] FOURCHE OPTIQUE NUMERIQUE Réf. BEESPI Fourche optique numérique Réf. BEESPI Page 1 sur 5 1. MESURES DE PRECAUTION Tenir
Cours 1 : Introduction Ordinateurs - Langages de haut niveau - Application
 Université de Provence Licence Math-Info Première Année V. Phan Luong Algorithmique et Programmation en Python Cours 1 : Introduction Ordinateurs - Langages de haut niveau - Application 1 Ordinateur Un
Université de Provence Licence Math-Info Première Année V. Phan Luong Algorithmique et Programmation en Python Cours 1 : Introduction Ordinateurs - Langages de haut niveau - Application 1 Ordinateur Un
Conservation des documents numériques
 Conservation des documents numériques Qu'est ce qu'un document numérique? Matthieu GIOUX [email protected] Contexte de la préservation des documents numériques Une croissance en expansion Développement
Conservation des documents numériques Qu'est ce qu'un document numérique? Matthieu GIOUX [email protected] Contexte de la préservation des documents numériques Une croissance en expansion Développement
Système de réglage en hauteur pour cuisines Châssis de cuisine pour plans de travail accessibles aux chaises
 Châssis de cuisine pour plans de travail accessibles aux chaises Châssis de cuisine pour plans de travail accessibles aux chaises roulantes Flexi est un châssis de cuisine facile à construire pour plans
Châssis de cuisine pour plans de travail accessibles aux chaises Châssis de cuisine pour plans de travail accessibles aux chaises roulantes Flexi est un châssis de cuisine facile à construire pour plans
KM2 W1 EVC1 M3~ Manuel AUTOMSIM API 24V. BP Dcy 1MINI 1MAXI. www.irai.com
 L1 L2 L3 F1 M1 KM2 0V U1 V1 M3~ W1 EVC1 Manuel AUTOMSIM 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 API 24V 0 1 2 C1MINI BP Dcy C1MAXI 1MAXI 1MINI EVC1 www.irai.com INTRODUCTION... 5 INSTALLATION... 6 PRISE EN
L1 L2 L3 F1 M1 KM2 0V U1 V1 M3~ W1 EVC1 Manuel AUTOMSIM 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 API 24V 0 1 2 C1MINI BP Dcy C1MAXI 1MAXI 1MINI EVC1 www.irai.com INTRODUCTION... 5 INSTALLATION... 6 PRISE EN
PRINCIPE ET FONCTIONNEMENT DES DÉFIBRILLATEURS AUTOMATIQUES IMPLANTABLES (DAI)
") PRINCIPE ET FONCTIONNEMENT DES DÉFIBRILLATEURS AUTOMATIQUES IMPLANTABLES (DAI) 2 Défibrillateur Automatique Implantable SOMMAIRE Introduction Indications Principe du DAI Historique Composants et structure
PRINCIPE ET FONCTIONNEMENT DES DÉFIBRILLATEURS AUTOMATIQUES IMPLANTABLES (DAI) 2 Défibrillateur Automatique Implantable SOMMAIRE Introduction Indications Principe du DAI Historique Composants et structure
Sciences de Gestion Spécialité : SYSTÈMES D INFORMATION DE GESTION
 Sciences de Gestion Spécialité : SYSTÈMES D INFORMATION DE GESTION Classe de terminale de la série Sciences et Technologie du Management et de la Gestion Préambule Présentation Les technologies de l information
Sciences de Gestion Spécialité : SYSTÈMES D INFORMATION DE GESTION Classe de terminale de la série Sciences et Technologie du Management et de la Gestion Préambule Présentation Les technologies de l information
Toute personne souhaitant maîtriser les techniques liées à la conception de produits multimédia et à la création de sites Web.
 Web Designer Durée 90 jours (630 h) Public Toute personne souhaitant maîtriser les techniques liées à la conception de produits multimédia et à la création de sites Web. Objectifs La formation Web designer
Web Designer Durée 90 jours (630 h) Public Toute personne souhaitant maîtriser les techniques liées à la conception de produits multimédia et à la création de sites Web. Objectifs La formation Web designer
Votre Réseau est-il prêt?
 Adapter les Infrastructures à la Convergence Voix Données Votre Réseau est-il prêt? Conférence IDG Communications Joseph SAOUMA Responsable Offre ToIP Rappel - Définition Voix sur IP (VoIP) Technologie
Adapter les Infrastructures à la Convergence Voix Données Votre Réseau est-il prêt? Conférence IDG Communications Joseph SAOUMA Responsable Offre ToIP Rappel - Définition Voix sur IP (VoIP) Technologie
Système de contrôle d accès Codelock avec clavier de codage CL12
 Information de produit Système de contrôle d accès Codelock avec clavier de codage CL12 Sommaire Page Indications de sécurité 2 Vue de l appareil 3 Données techniques 3 Brève description 4 Montage 5 Mise
Information de produit Système de contrôle d accès Codelock avec clavier de codage CL12 Sommaire Page Indications de sécurité 2 Vue de l appareil 3 Données techniques 3 Brève description 4 Montage 5 Mise
L inégale répartition de l énergie solaire est à l origine des courants atmosphériques
 L inégale répartition de l énergie solaire est à l origine des courants atmosphériques I/ Objectif : Dans la partie 2 du programme de seconde «enjeux planétaires contemporains : énergie et sol», sous partie
L inégale répartition de l énergie solaire est à l origine des courants atmosphériques I/ Objectif : Dans la partie 2 du programme de seconde «enjeux planétaires contemporains : énergie et sol», sous partie
PNEUS FREINS ABS ESP HUILE VITESSES
 31. - LA TECHNIQUE PNEUS FREINS ABS ESP HUILE VITESSES LES PNEUS D UNE VOITURE 1. Les pneus doivent être conformes. Ce sont les pneus qui assument le contact de la voiture avec la route. Pour rouler en
31. - LA TECHNIQUE PNEUS FREINS ABS ESP HUILE VITESSES LES PNEUS D UNE VOITURE 1. Les pneus doivent être conformes. Ce sont les pneus qui assument le contact de la voiture avec la route. Pour rouler en
Les nouveaux programmes de l él. école primaire. Projet soumis à consultation
 Les nouveaux programmes de l él primaire Projet soumis à consultation primaire Les nouveaux programmes sont plus courts : environ 36 pages format BO contre 104. Ils sont écrits dans un langage clair sans
Les nouveaux programmes de l él primaire Projet soumis à consultation primaire Les nouveaux programmes sont plus courts : environ 36 pages format BO contre 104. Ils sont écrits dans un langage clair sans
PARCOURS COMPLET AU COURS MOYEN
 81 I) UNE ENTAME DE TYPE "SOCIAL" : LE BUREAU DE POSTE Le bureau de poste de St Herblain Preux est récent. La classe de CM de l'école proche ("Les Crépinais") pouvait y découvrir divers aspects de l'informatique
81 I) UNE ENTAME DE TYPE "SOCIAL" : LE BUREAU DE POSTE Le bureau de poste de St Herblain Preux est récent. La classe de CM de l'école proche ("Les Crépinais") pouvait y découvrir divers aspects de l'informatique
L optimisation d une PowerBoutique pour le référencement
 L optimisation d une PowerBoutique pour le référencement page 1/11 Tables des matières 1 Les balises de référencement...4 2 La hiérarchisation de l information...7 3 La mise en exergue des mots clés...7
L optimisation d une PowerBoutique pour le référencement page 1/11 Tables des matières 1 Les balises de référencement...4 2 La hiérarchisation de l information...7 3 La mise en exergue des mots clés...7
Vers l'ordinateur quantique
 Cours A&G Vers l'ordinateur quantique Données innies On a vu dans les chapîtres précédents qu'un automate permet de représenter de manière nie (et même compacte) une innité de données. En eet, un automate
Cours A&G Vers l'ordinateur quantique Données innies On a vu dans les chapîtres précédents qu'un automate permet de représenter de manière nie (et même compacte) une innité de données. En eet, un automate
- affichage digital - aiguille
 . Lire l heure On peut lire l heure sur une horloge, un réveil, une montre à : - affichage digital - aiguille A) La lecture sur un système digital est très simple, il suffit de lire les nombres écrits
. Lire l heure On peut lire l heure sur une horloge, un réveil, une montre à : - affichage digital - aiguille A) La lecture sur un système digital est très simple, il suffit de lire les nombres écrits
Chapitre 2 Caractéristiques des ondes
 Chapitre Caractéristiques des ondes Manuel pages 31 à 50 Choix pédagogiques Le cours de ce chapitre débute par l étude de la propagation des ondes progressives. La description de ce phénomène est illustrée
Chapitre Caractéristiques des ondes Manuel pages 31 à 50 Choix pédagogiques Le cours de ce chapitre débute par l étude de la propagation des ondes progressives. La description de ce phénomène est illustrée
Qualité du logiciel: Méthodes de test
 Qualité du logiciel: Méthodes de test Matthieu Amiguet 2004 2005 Analyse statique de code Analyse statique de code Étudier le programme source sans exécution Généralement réalisée avant les tests d exécution
Qualité du logiciel: Méthodes de test Matthieu Amiguet 2004 2005 Analyse statique de code Analyse statique de code Étudier le programme source sans exécution Généralement réalisée avant les tests d exécution
La gestion des contraintes pour modéliser les stratégies humaines d'ordonnancement et concevoir des interfaces homme-machine ergonomiques
 La gestion des contraintes pour modéliser les stratégies humaines d'ordonnancement et concevoir des interfaces homme-machine ergonomiques Clément Guerin Sous la direction de J.M. Hoc et de N. Mebarki Réunion
La gestion des contraintes pour modéliser les stratégies humaines d'ordonnancement et concevoir des interfaces homme-machine ergonomiques Clément Guerin Sous la direction de J.M. Hoc et de N. Mebarki Réunion
http://www.flashdisk.com.cn/english/index.asp http://www.flashdisk.com.cn/english/productcontent1.asp?pid=11&cid=105&id=126
 Une clé USB alimentée par le soleil informatiques connus. A ne pas confondre avec la société Trust, TRUS (Truth Digital Technology) d origine chinoise, a présenté lors du dernier CeBIT, une clé USB solaire.
Une clé USB alimentée par le soleil informatiques connus. A ne pas confondre avec la société Trust, TRUS (Truth Digital Technology) d origine chinoise, a présenté lors du dernier CeBIT, une clé USB solaire.
COMMENT CREER VOS BANDES GRAND FORMAT?
 COMMENT CREER VOS BANDES GRAND FORMAT? Mode d emploi pour les bandes impression noire ou couleur sur papier blanc ou fluo NB : Pour les bandes grand format imprimées en couleur, merci de suivre les explications
COMMENT CREER VOS BANDES GRAND FORMAT? Mode d emploi pour les bandes impression noire ou couleur sur papier blanc ou fluo NB : Pour les bandes grand format imprimées en couleur, merci de suivre les explications
KIT D AIDE A LA MISE EN ACCESSIBILITE DES ETABLISSEMENTS DE TOURISME ET DE COMMERCE Édition Janvier 2015 FICHE N 2D RENDRE MON COMMERCE ACCESSIBLE
 KIT D AIDE A LA MISE EN ACCESSIBILITE DES ETABLISSEMENTS DE TOURISME ET DE COMMERCE Édition Janvier 2015 FICHE N 2D RENDRE MON COMMERCE ACCESSIBLE RAPPEL : Pour les ERP classés 1, 2, 3, 4e catégorie :
KIT D AIDE A LA MISE EN ACCESSIBILITE DES ETABLISSEMENTS DE TOURISME ET DE COMMERCE Édition Janvier 2015 FICHE N 2D RENDRE MON COMMERCE ACCESSIBLE RAPPEL : Pour les ERP classés 1, 2, 3, 4e catégorie :
Informatique et sciences du numérique
 Informatique et sciences du numérique Philippe Marquet Colloque IREM, Lyon 25 mai 2013 Informatique et sciences du numérique Septembre 2012 : ISN, spécialité en classe de terminale S Pourquoi introduire
Informatique et sciences du numérique Philippe Marquet Colloque IREM, Lyon 25 mai 2013 Informatique et sciences du numérique Septembre 2012 : ISN, spécialité en classe de terminale S Pourquoi introduire
Objectifs et logique du Page 3
 Document conçu par l équipe des conseillers pédagogiques EPS du Haut-Rhin avec l aide précieuse de Thierry Lichtlé CTS Athlétisme et Isabelle Logeart professeur à l UFRSTAPS de Strasbourg Année scolaire
Document conçu par l équipe des conseillers pédagogiques EPS du Haut-Rhin avec l aide précieuse de Thierry Lichtlé CTS Athlétisme et Isabelle Logeart professeur à l UFRSTAPS de Strasbourg Année scolaire
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Accessibilité des personnes handicapées dans les ERP
 Accessibilité des personnes handicapées dans les ERP 09-2011 http://www.ville-libourne.fr La loi du 11 février 2005 dite "Loi Handicap" vise à susciter un nouvel élan dans la prise en compte de l'insertion
Accessibilité des personnes handicapées dans les ERP 09-2011 http://www.ville-libourne.fr La loi du 11 février 2005 dite "Loi Handicap" vise à susciter un nouvel élan dans la prise en compte de l'insertion
Application à l astrophysique ACTIVITE
 Application à l astrophysique Seconde ACTIVITE I ) But : Le but de l activité est de donner quelques exemples d'utilisations pratiques de l analyse spectrale permettant de connaître un peu mieux les étoiles.
Application à l astrophysique Seconde ACTIVITE I ) But : Le but de l activité est de donner quelques exemples d'utilisations pratiques de l analyse spectrale permettant de connaître un peu mieux les étoiles.
FÉDÉRATION INTERNATIONALE DE PÉTANQUE ET JEU PROVENÇAL REGLEMENT DU CHAMPIONNAT DU MONDE DE TIR INDIVIDUEL
 FÉDÉRATION INTERNATIONALE DE PÉTANQUE ET JEU PROVENÇAL REGLEMENT DU CHAMPIONNAT DU MONDE DE TIR INDIVIDUEL Article 1er : Pas de Tir : Il est composé d'un cercle d'un mètre de diamètre comportant les marques
FÉDÉRATION INTERNATIONALE DE PÉTANQUE ET JEU PROVENÇAL REGLEMENT DU CHAMPIONNAT DU MONDE DE TIR INDIVIDUEL Article 1er : Pas de Tir : Il est composé d'un cercle d'un mètre de diamètre comportant les marques
MB Led. Benjamin Bonny Cédric Le Ninivin Guillaume Normand
 MB Led Benjamin Bonny Cédric Le Ninivin Guillaume Normand Utilisation d un projet existant Projet GLiP Affichage de Gif animés avec un bloc maître (contrôlés via un port série). Affichage adapté dynamiquement
MB Led Benjamin Bonny Cédric Le Ninivin Guillaume Normand Utilisation d un projet existant Projet GLiP Affichage de Gif animés avec un bloc maître (contrôlés via un port série). Affichage adapté dynamiquement
Easy Lock. Mod. DPN13PG Mod. DPN18PG V.2 LIRE LES INSTRUCTIONS ATTENTIVEMENT AVANT UTILISATION ET LES CONSERVER EN CAS DE BESOIN PAGE 2 PAGE 4 PAGE 8
 Easy Lock Mod. DPN13PG Mod. DPN18PG PIN V.2! LIRE LES INSTRUCTIONS ATTENTIVEMENT AVANT UTILISATION ET LES CONSERVER EN CAS DE BESOIN GUIDE D'UTILISATION MANUTENTION NOTICE D'INSTALLATION PAGE 2 PAGE 4
Easy Lock Mod. DPN13PG Mod. DPN18PG PIN V.2! LIRE LES INSTRUCTIONS ATTENTIVEMENT AVANT UTILISATION ET LES CONSERVER EN CAS DE BESOIN GUIDE D'UTILISATION MANUTENTION NOTICE D'INSTALLATION PAGE 2 PAGE 4
Exercice 6 Associer chaque expression de gauche à sa forme réduite (à droite) :
 :") Eercice a Développer les epressions suivantes : A-(-) - + B-0(3 ²+3-0) -0 3²+-0 3+00 B -30²-30+00 C-3(-) -3 + 3-3²+6 D-(-) + ² Eerciceb Parmi les epressions suivantes, lesquelles sont sous forme réduite?
Eercice a Développer les epressions suivantes : A-(-) - + B-0(3 ²+3-0) -0 3²+-0 3+00 B -30²-30+00 C-3(-) -3 + 3-3²+6 D-(-) + ² Eerciceb Parmi les epressions suivantes, lesquelles sont sous forme réduite?
Logiciel PICAXE Programming Editor
 Logiciel PICAXE Programming Editor Notice réduite 1. Lancer le logiciel PICAXE Programming Editor (Vidéo : «Lancer le programme»). 2. Dessiner un diagramme (Vidéos : «Nouveau programme» et «Dessiner le
Logiciel PICAXE Programming Editor Notice réduite 1. Lancer le logiciel PICAXE Programming Editor (Vidéo : «Lancer le programme»). 2. Dessiner un diagramme (Vidéos : «Nouveau programme» et «Dessiner le
Systèmes décisionnels et programmation avancée
 Systèmes décisionnels et programmation avancée M1 SIR Philippe Muller et Mustapha Mojahid, Matthieu Serrurier, Marie-Christine Scheix 2014-2015 Introduction structure du cours intervenants introduction
Systèmes décisionnels et programmation avancée M1 SIR Philippe Muller et Mustapha Mojahid, Matthieu Serrurier, Marie-Christine Scheix 2014-2015 Introduction structure du cours intervenants introduction
NOM : Prénom : Date de naissance : Ecole : CM2 Palier 2
 NOM : Prénom : Date de naissance : Ecole : CM2 Palier 2 Résultats aux évaluations nationales CM2 Annexe 1 Résultats de l élève Compétence validée Lire / Ecrire / Vocabulaire / Grammaire / Orthographe /
NOM : Prénom : Date de naissance : Ecole : CM2 Palier 2 Résultats aux évaluations nationales CM2 Annexe 1 Résultats de l élève Compétence validée Lire / Ecrire / Vocabulaire / Grammaire / Orthographe /
GDR des CPE sous la direction de Nathalie Szoc LIVRET DE FORMATION ET DE COMPETENCE CPE
 GDR des CPE sous la direction de Nathalie Szoc LIVRET DE FORMATION ET DE COMPETENCE CPE Compétences communes à tous les professeurs et personnels d éducation Référentiel des compétences professionnelles
GDR des CPE sous la direction de Nathalie Szoc LIVRET DE FORMATION ET DE COMPETENCE CPE Compétences communes à tous les professeurs et personnels d éducation Référentiel des compétences professionnelles
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie