EPREUVE E4 MOTORISATION DES SYSTEMES
|
|
|
- Cyprien Després
- il y a 8 ans
- Total affichages :
Transcription
1 BREVET DE TECHNICIEN SUPERIEUR CONCEPTION DE PRODUITS INDUSTRIELS SESSION 2011 EPREUVE E4 MOTORISATION DES SYSTEMES Durée : 3 heures Aucun document n est autorisé Calculatrice autorisée (conformément à la circulaire n du 16 novembre 1999) Le sujet comporte trois dossiers : - un dossier technique - un dossier travail - un dossier réponse Le dossier réponse est à joindre aux feuilles de copie. THÈME : PLATE FORME TOURNANTE

2 BREVET DE TECHNICIEN SUPERIEUR CONCEPTION DE PRODUITS INDUSTRIELS SESSION 2011 EPREUVE E4 MOTORISATION DES SYSTEMES DOSSIER TRAVAIL PLATE FORME TOURNANTE Tous les documents nécessaires à la réponse sont mentionnés en dessous du repère de chaque question. Ce dossier comporte 3 pages. Temps conseillé : Lecture du sujet 15 min 1) DETERMINATION DE LA MOTORISATION 120 min 1.1) Choix de la motorisation 1.2) Analyse de la phase de démarrage 1.3) Caractéristiques nominales du moteur 1.4) Analyse du système de freinage 1.5) Protections de la motorisation 1.6) Détermination et paramétrage du variateur 2) DETERMINATION DE LA DETECTION 45 min 2.1) Position de référence de la plate-forme 2.2) Comptage des voies et alignement de la plate-forme 2.3) Solutions alternatives
 Détermination et paramétrage du variateur 2) DETERMINATION DE LA DETECTION 45 min 2.1) Position de référence de la plate-forme 2.2) Comptage des voies et alignement de la plate-forme 2.")
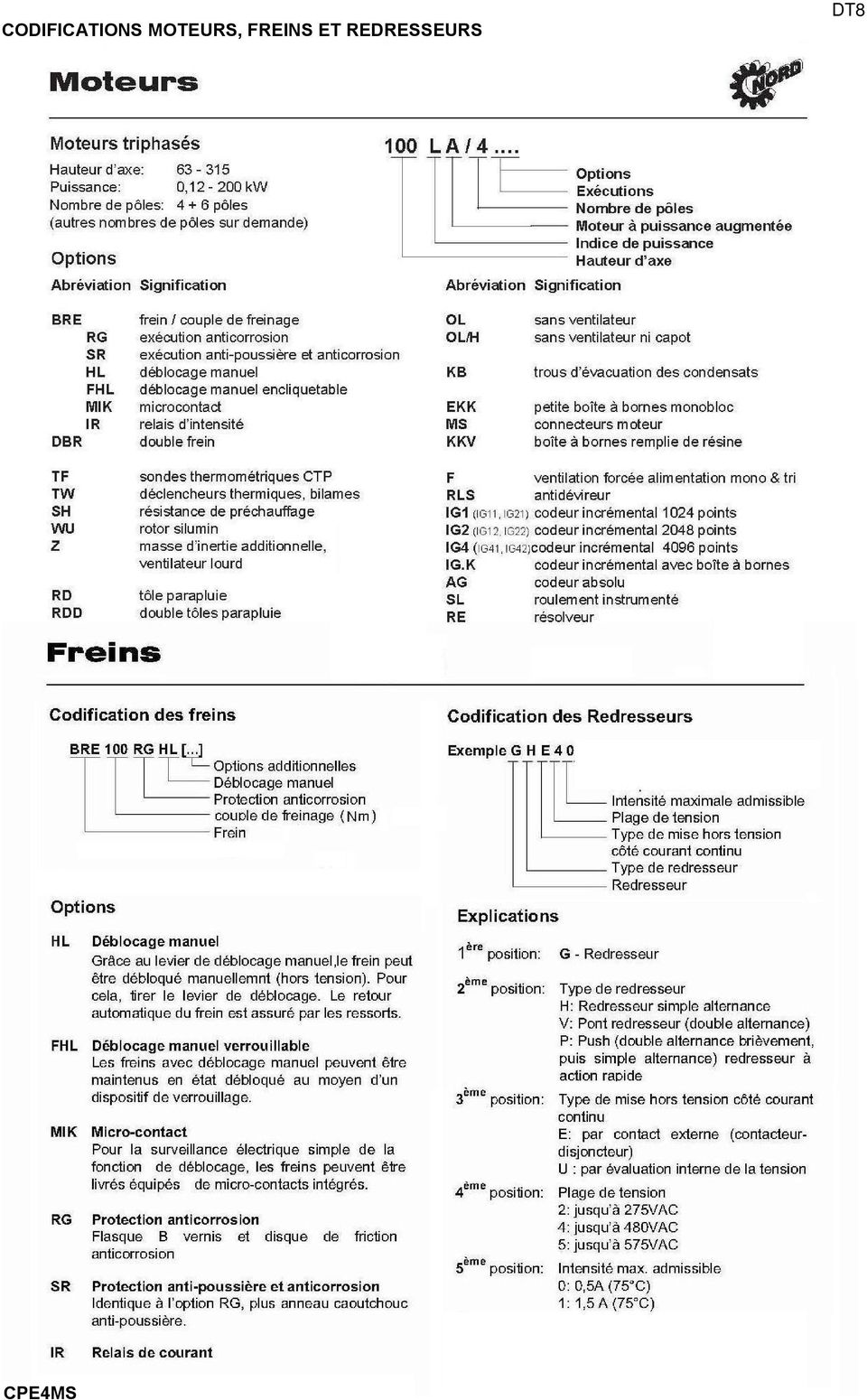
3 Travail 1/3 1) DETERMINATION DE LA MOTORISATION Objectif Suite aux modifications de la plate-forme, les motorisations ont dû évoluer. Il s'agit donc de déterminer les références des motoréducteurs, freins et variateur ainsi que celles des protections associées. On s'attachera à vérifier que les équipements choisis et leur paramétrage permettent de satisfaire aux exigences du cahier des charges. 1.1) Choix du motoréducteur Hypothèses de travail En fonctionnement normal, les deux motorisations (côtés 1 et 2) sont utilisées ; en cas de défaillance de l'une d'entre elles, l'autre doit être suffisante pour entraîner la plate-forme. Le calcul sera donc effectué avec une seule motorisation. Question 1. A partir du temps de déplacement sur un ½ tour, calculer : DT3 - la vitesse angulaire ω PF de la plate-forme ; Feuille de copie - la vitesse angulaire ωr et la fréquence de rotation n R en sortie du réducteur ; DR1 Justifier les calculs sur feuille de copie et donner les résultats sur le DR1. Question 2. DT3 ; DT7 ; DT8 DR1 La puissance du motoréducteur est estimée à P MR = 9860 W. Déterminer la référence du motoréducteur en précisant le couple de sortie C R. A partir du DT8, donner la hauteur d'axe et le nombre de pôles du motoréducteur choisi. 1.2) Analyse de la phase de démarrage Hypothèses de travail - La puissance du moteur retenu sera, pour tout le reste du sujet, PN = 11 kw. - La vitesse angulaire de la plate-forme sera ω PF = 0,079 rd.s Moment d'inertie total ramené sur l'axe moteur Jt = 1,96 kg.m². - Durée de l'accélération ΔtA = J t. Δω / C. Question 3. A partir des données techniques du DT9 : DT9 - indiquer le couple nominal C N et le moment d'inertie du moteur J M ; Feuille de copie DR1 - calculer le couple au démarrage CA ; - calculer la vitesse angulaire nominale du moteur ωn. Justifier les calculs sur feuille de copie et porter les résultats sur le DR1. Question 4. DT3 Feuille de copie Sachant que la valeur du couple de la charge ramené sur l'axe moteur est C R = 72 Nm, appliquer le théorème du moment dynamique à l'arbre moteur afin de calculer la durée de l'accélération ΔtA. Justifier la valeur de 5 secondes paramétrée sur le variateur. 1.3) Détermination des différents points de fonctionnement du moteur Hypothèses de travail - Le moteur est commandé par un variateur de vitesse à commande scalaire (U/f constant). - Le couple résistant est considéré comme constant à C R = 72 Nm. Question 5. DT9 Feuille de copie Question 6. DT9 DR1 A partir des données techniques du DT9, calculer la vitesse de synchronisme n S1 ainsi que le glissement nominal g N. Indiquer, sur le DR1, les différentes vitesses de synchronismes n S. Tracer en rouge sur la caractéristique le couple résistant CR. Tracer en vert sur la caractéristique la partie utile de la caractéristique du couple moteur en fonction de la vitesse de rotation CM=f(n M ) pour f 1 =50Hz, f 2 =35Hz et pour f mini =5,4Hz. Indiquer, sur le DR1, les différentes vitesses nominales n. N
 Choix du motoréducteur Hypothèses de travail En fonctionnement normal, les deux motorisations (côtés 1 et 2) sont utilisées ; en cas de défaillance de l'une d'entre elles, l'autre doit être")
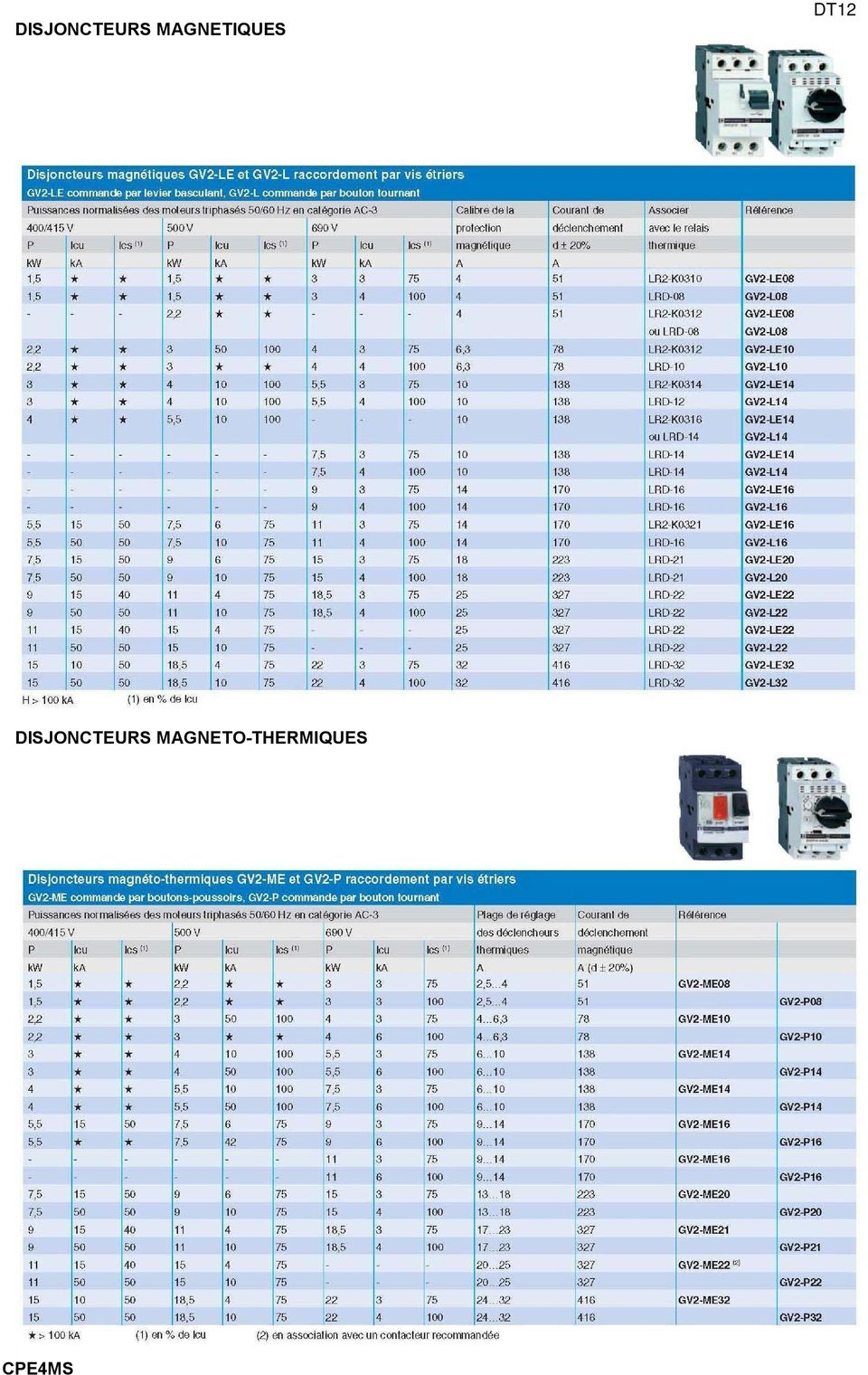
4 Travail 2/3 1.4) Analyse du système de freinage Hypothèse de travail - Frein BRE100 à déblocage manuel avec protection contre la corrosion et la poussière. Question 7. DT4; DT5; DT8 ; DT10 DR1 Question 8. DT8 DR1 A partir de la lecture des folios DT4 et DT5, déterminer la tension d'alimentation U AC du redresseur (repéré 04U1) qui alimente le frein. En déduire la référence du redresseur type H et calculer la tension de la bobine U Compléter la partie "Options" de la référence du motoréducteur afin de prendre en compte les caractéristiques du frein. DC. 1.5) Protections de la motorisation Hypothèses de travail - La température dans les enroulements du moteur est surveillée par des sondes thermométriques. - Les moteurs sont protégés contre les surintensités par des disjoncteurs. Question 9. DT8 Feuille de copie DR1 Question 10. DT5 ; DT6 DR2 Question 11. DT5 ; DT9 ; DT12 DR2 Rappeler le principe de fonctionnement des sondes thermométriques (CTP). Compléter la partie "Options" de la référence du motoréducteur afin d'intégrer la présence des sondes thermométriques. A partir de la lecture du folio 4 (DT5) et du folio 15 (DT6), donner les repères des éléments qui constituent la protection thermométrique pour le moteur 04M1. Repérer par un cadre, sur le DR2, la prise en compte de cette sécurité. A partir du symbole repéré 04Q1 sur le folio 4 (DT5), rappeler les 3 fonctions principales assurées par le disjoncteur moteur. Donner la référence de ce constituant sachant que l'on souhaite un bouton tournant. Préciser la valeur de réglage de la protection thermique. 1.6) Détermination et paramétrage du variateur Hypothèses de travail - Le convertisseur de fréquence sera choisi dans la série NORDAC SK 700E. - Attention : un seul variateur commande les deux moteurs simultanément. Question 12. Déterminer la référence du convertisseur de fréquence dans la série SK 700E. DT11 DR2 Question 13. DT4 DR2 Afin d'intégrer le variateur dans la commande de la plate-forme, compléter sur le document DR2 (folio 25), le schéma de l'entrée %I1.6 (défaut variateur). Utiliser, pour cela, le repérage des renvois de folio (F : n folio n colonne) Question 14. Déterminer la valeur des paramètres variateur : DT3 ; DT9 - n 102 à l'aide du DT3 ; DR3 - n 202, 203, 205 et 207 à l'aide du DT9 ; - n 429 (100% de la fréquence maximale) et 430 (70% de la fréquence maximale).
 Protections de la motorisation Hypothèses de travail - La température dans les enroulements du moteur est surveillée par des sondes thermométriques.")
5 Travail 3/3 2) DETERMINATION DU POSITIONNEMENT Objectif Le positionnement automatique de la plate-forme est effectué en mode relatif, c'est-à-dire par comptage du nombre de voies au moment du déplacement. Il est donc nécessaire, avant de l'utiliser, d'effectuer une prise de référence afin de savoir dans quelle position se trouve la plate-forme. On cherche à déterminer les références ainsi que les avantages / inconvénients des différentes méthodes de détection envisageables pour le positionnement de la plate-forme. 2.1) Position de référence de la plate-forme Hypothèses de travail La position de référence est obtenue à l'aide d'un capteur implanté sur la rotonde et une plaque métallique sur la plate-forme. La distance de détection est de 3 mm. Cette fonction sera assurée par un détecteur 3 fils avec un boîtier noyable et un connecteur de type M12. L'entrée automate (module TSXDMZ28DR en logique positive) sera activée en position de référence. Question 15. Feuille de copie Question 16. DT13 Feuille de copie Indiquer et justifier le type de détecteur nécessaire. Préciser les avantages / inconvénients d'un détecteur 2 fils par rapport à un 3 fils. Si on s'oriente vers un détecteur 3 fils, indiquer et justifier le type de technologie adaptée (NPN ou PNP). Question 17. DT13 DR2 Question 18. DT13 DR3 Réaliser, sur le document DR2, le schéma de raccordement de ce détecteur sur l'entrée %I1.12 (préciser le repérage des bornes). Donner, sur le document DR3, la référence du détecteur répondant aux hypothèses de travail définies. 2.2) Comptage des voies et alignement de la plate-forme Hypothèses de travail Un détecteur photoélectrique placé à l'extrémité de la plate-forme et 35 réflecteurs placés en face de chaque voie permettent le comptage et l'alignement. Question 19. DT13 Feuille de copie 2.3) Solutions alternatives Préciser le principe utilisé par un détecteur photoélectrique ainsi que l'intérêt du filtre de polarisation. Hypothèses de travail La solution actuelle n'est pas entièrement satisfaisante. La technologie de ce système fait qu'il est possible que des salissures viennent perturber la détection. Il convient d'entretenir régulièrement les éléments de détection. Il est donc nécessaire d'envisager une solution alternative utilisant un codeur solidaire de la plate-forme. Question 20. DR3 Question 21. DR3 Feuille de copie Compléter le tableau, sur le document DR3, en donnant une des réponses proposées pour le codeur incrémental et pour le codeur absolu. Calculer l'angle entre deux axes de voies. Déterminer la résolution du codeur pour une précision de ±2%. Justifier les calculs sur feuille de copie et donner les résultats sur le DR3. Question 22. Déterminer et justifier le nombre d'entrées automate nécessaires avec : DR3 - un codeur absolu ; Feuille de copie - un codeur incrémental. Question 23. DR3 Question 24. DT13 ; DT14 DR3 A partir des éléments déterminés précédemment, choisir le codeur permettant une mise en œuvre simple et économique pour le positionnement de la plate-forme. Déterminer la référence du codeur sachant qu'il doit être directement raccordé sur la carte automate TSXDMZ28DR.
 Position de référence de la plate-forme Hypothèses de travail La position de référence est obtenue à l'aide d'un capteur implanté sur la rotonde et une plaque métallique sur la plate-forme.")
6 BREVET DE TECHNICIEN SUPERIEUR CONCEPTION DE PRODUITS INDUSTRIELS SESSION 2011 EPREUVE E4 MOTORISATION DES SYSTEMES DOSSIER TECHNIQUE PLATE FORME TOURNANTE Ce dossier comporte 14 pages. DT1 Mise en situation DT2 Mise en situation DT3 Fonction DT4 Schéma de puissance : Folio 03 DT5 Schéma de puissance : Folio 04 DT6 Schéma de commande : Folio 15 DT7 Motoréducteurs à couple conique DT8 Codifications moteurs, freins et redresseurs DT9 Moteurs 1500 tr.min -1 / 50Hz DT10 Redresseurs de freins DT11 Variateurs série SK700E DT12 Disjoncteurs DT13 Détecteurs Module automate TSXDMZ28DR DT14 Codeurs incrémentaux et absolus

7 1) MISE EN SITUATION DT1 1.1) Présentation générale Le dépôt S.N.C.F. de Bordeaux est équipé d une plate-forme tournante dont la fonction essentielle est la desserte et la mise en place de locomotives sur trente cinq voies. 3 voies d'arrivée (repérées 103 à 105), permettent d'amener des locomotives vers une rotonde constituée par des ateliers de réparation et de maintenance disposés en arc de cercle desservis par 32 voies. Voies d'arrivée des locomotives Ateliers de Réparation Rotonde Fosse Ateliers de Réparation ) Fonctionnement Le fonctionnement de la plate-forme se décompose en plusieurs phases : 1. La plate-forme est positionnée en vis-à-vis de la voie d'arrivée de la locomotive. 2. Après autorisation de l'opérateur, elle est placée sur la plate-forme tournante. 3. La plateforme tourne et se positionne en face de l'atelier souhaité pour maintenance ou réparation. 4. Après autorisation de l'opérateur, la locomotive quitte la plate-forme. 5. La plate-forme reste en l'état en attente d'un autre déplacement. Plate-forme en position de référence : - une locomotive arrive par la voie n 103; - la cabine de pilotage est sur la gauche avec sa passerelle d'accès; - la voie de roulement (rail en forme de cercle) est en fond de fosse. - la voie n 29 est au 1 er plan avec de part et d'autre les feux de signalisation. Plate-forme en rotation La plate-forme tournante, montée sur un pivot central, est placée dans une fosse au fond de laquelle est disposé un rail en forme de cercle appelé voie de roulement.

8 1.3) Schématisation de la plate forme DT2 Bord de fosse Fosse Portillon côté 1 Signalisation entrée côté 1 Motorisation 1 Voie de circulation des locomotives Signalisation sortie côté 1 Contre poids Contre poids Voie d'arrivée Côté 1 Côté 2 Pivot central Passerelle d'accès Pupitre Passerelle d'accès Cabine Signalisation sortie côté 1 Motorisation 2 Signalisation entrée côté 2 Voie de roulement de la plate-forme (Rail) Fosse Portillon côté 2 1.4) Présentation de la motorisation de la plate-forme La plate forme est entraînée en rotation autour du pivot central par l'adhérence du galet d'entraînement sur le rail (voie de roulement). Frein Moteur Réducteur à couple conique Pignon 1 Pignon 2 Galet de roulement Voie de roulement (Rail)
 Présentation de la motorisation de la plate-forme La plate forme est entraînée en rotation autour du pivot central par l'adhérence du galet d'entraînement sur le rail (voie de")
9 2) FONCTIONS DT3 2.1) Expression du besoin Qualifiée de stratégique, cette installation se doit d assurer un service optimum ; c est pourquoi le service Technicentre Aquitaine de la SNCF a souhaité une modernisation de cette plate-forme : - Modernisation de la partie commande (P.C.) par : o une automatisation gérée par un automate programmable industriel ; o l'intégration d'un variateur de vitesse. - Modernisation de la partie opérative (P.O.) également par : o le remplacement des deux moteurs asynchrones (surpoids dû à la cabine + contre poids) ; o la détection de position de la plate-forme. 2.2) Architecture retenue 2.2.1) Données techniques : Longueur de la plate-forme L 24 m PF Inertie de la plate-forme J PF Diamètre de la voie de roulement (rail en forme de cercle) D 22 m VR Nombre de voies sur un demi-tour N 32 V 5 kg.m² Temps nécessaire à la plate-forme pour effectuer un ½ tour t 40 secondes 1/2 Rendement du réducteur à couple conique η 0,9 R Réducteur Engrenage Pignon 1 (entraînant) ke 25 dents Pignon 2 (entraîné) 62 dents Rendement η 0,9 E Diamètre du galet D 650 mm G Paramètres variateurs à fréquence maximale 2.2.2) Schématisation de la motorisation Durée d'accélération ta 5 s Durée de décélération td 4 s Alimentation électrique 3x400V/50Hz MOTOREDUCTEUR 1 Variateur de vitesse Moteur 1 P M ; η M C M ω M Réducteur k R ; η R MOTOREDUCTEUR 2 C R ω R Engrenage k E ; η E C E ω E Galet 1 D G C PF ω PF Plateforme L PF Moteur 2 P M ; η M C M ω M Réducteur k R ; η R C R ω R Engrenage k E ; η E C E ω E Galet 2 D G C PF ω PF 2.2.3) Définition du profil vitesse Le profil vitesse imposé par le variateur au moteur est défini ci-dessous. On ne représente que le cas d'une accélération complète (temps de déplacement supérieur à 5s). Le cas d'une accélération incomplète (déplacement inférieur à 5s) n'est pas envisagé dans cette étude. ω Positionnement ω 1 ω 2 ω ω mini 0 t Accélération t A Décélération t D Freinage t B
 également par : o le remplacement des deux moteurs asynchrones (surpoids dû à la cabine + contre poids) ; o la détection de position de la plate-forme. 2.")
10 SCHEMA DE PUISSANCE : Folio 03 DT4 Numéro de colonne : N 10 Renvoi de folio : Folio 04, colonne 7 Repérage du conducteur : Folio 04 + n 14 Nom du constituant : 03Q4

11 SCHEMA DE PUISSANCE : Folio 04 DT5

12 SCHEMA DE COMMANDE : Folio 15 DT6

13 MOTOREDUCTEURS A COUPLE CONIQUE DT7 Référence Remarque : Le constructeur NORD utilise la notation "min -1 " pour signifier qu'il s'agit de tours par minute. Le constructeur NORD utilise la notation "M" pour signifier qu'il s'agit du couple C en N.m.

14 CODIFICATIONS MOTEURS, FREINS ET REDRESSEURS DT8
15 DT9-1 MOTEURS 1500 tr.min / 50Hz Unité Remarque : -1 Le constructeur NORD utilise la notation "min " pour signifier qu'il s'agit de tours par minute. Le constructeur NORD utilise la notation "M" pour signifier qu'il s'agit du couple C en N.m.

16 REDRESSEURS DE FREINS DT10

17 VARIATEURS SERIE SK700E DT11 Type d'appareil SK 700E A A A A Puissance nominale moteur [kw] 5,5 7, (moteur standard 4 pôles) [CV] 7, Tension secteur 3 CA V, -20%/+10%, Hz Courant nominal de sortie (rms) [A] 11,5 15, Résistance de freinage [Ω] Courant d'entrée typique (rms) [A] Température ambiante 0 C C (mode S3), 0 C C (mode S1) Type de ventilation Refroidissement par ventilateur (asservi à la température) Type d'appareil SK 700E A A A A Puissance nominale moteur [kw] 18,5 22,0 30,0 37,0 (moteur standard 4 pôles) [CV] Tension secteur 3 CA V, -20%/+10%, Hz 3 CA V, -20%/+10%, Hz Courant nominal de sortie (rms) [A] Résistance de freinage [Ω] Courant d'entrée typique (rms) [A] Température ambiante 0 C C (mode S3), 0 C C (mode S1) Type de ventilation Refroidissement par ventilateur (asservi à la température) Refroidissement par ventilateur
 [CV] 25 30 40 50 Tension secteur 3 CA 380 480 V, -20%/+10%, 47 63 Hz 3 CA 380 460 V, -20%/+10%, 47 63 Hz Courant nominal de sortie")
18 DISJONCTEURS MAGNETIQUES DT12 DISJONCTEURS MAGNETO-THERMIQUES
19 DETECTEURS DE PROXIMITE DT13 DETECTEURS PHOTOELECTRIQUES MODULE AUTOMATE TSXDMZ28DR

20 32 Ateliers Voies de d'arrivée Réparation des locomotives CODEURS INCREMENTAUX ET ABSOLUS DT14

21 BREVET DE TECHNICIEN SUPERIEUR CONCEPTION DE PRODUITS INDUSTRIELS SESSION 2011 EPREUVE E4 MOTORISATION DES SYSTEMES DOSSIER REPONSE PLATE FORME TOURNANTE Ce dossier comporte 3 pages.
22 DR1 Question 1. ω PF (rd.s -1 ) ωr (rd.s -1 ) nr (tr.min -1 ) Question 2. Référence du motoréducteur Couple C Nb de pôles R Hauteur d axe Question 3. C N (N.m) JM (kg.m²) CA (N.m) ωm (rd.s -1 ) Question 6. f (Hz) n S (tr.min -1 ) nn (tr.min -1 ) CR (Nm) 5, C M (N.m) Caractéristiques C M =f(n M ) pour 50Hz ; 35Hz ; 5,4Hz n M (tr.min -1 ) Question 7. Alim. U AC (V) Référence Bobine U DC (V) Questions 8 et 9. Frein Option 1 Option 2 Sondes BRE100
23 DR2 Question 10. Repère 1 Question 11. Fonctions assurées Repère 2 Question 12. Référence Référence Réglage Question 17 Question 13.
24 Question ,00s = valeurs de réglage possible [2,00] = valeur par défaut Paramètre Réglage / Description / Remarques Valeur P102 Rampe d accélération ,00 s [ 2,00 ] C'est le temps nécessaire pour atteindre la fréquence maximale réglée (P105) à partir d une fréquence de 0 Hz. P104 Fréquence minimale 0, ,0 Hz C'est la fréquence délivrée par le variateur, dès lors qu il reçoit un [ 5,4 ] [ 0,0 ] ordre de marche et qu aucune autre consigne n ait été activée. P105 Fréquence maximale 0, ,0 Hz C est la fréquence délivrée par le variateur après libération et en [ 50,0 ] [ 50,0 ] présence de la consigne maximale. P202 Vitesse de rotation nominale U/min [ xxx ] La vitesse de rotation nominale du moteur est une information essentielle pour le calcul du glissement moteur et l indication vitesse. P203 Courant nominal moteur 0, ,0 A [ xxx ] Le courant nominal du moteur est un paramètre décisif pour la régulation vectorielle du courant. P205 Puissance nominale moteur 0, kw [ xxx ] La puissance nominale peut être affichée pour vérifier la puissance du moteur réglée. P207 Couplage du moteur = Etoile ; 1 = Triangle [ x ] P429 Fréquence fixe Hz [ 0 ] La fréquence fixe est utilisée comme consigne après l activation via une entrée numérique et la validation du variateur. P430 Fréquence fixe Hz [ 0 ] Description du fonctionnement du paramètre, voir P429. DR3 Question 18. Référence Question 20. Caractéristiques Réponses proposées Codeur incrémental Codeur Absolu Insensibilité aux coupures réseau oui / non Nécessite un système de comptage oui / non Liaison parallèle / série Prix + / +++ Question 21. Angle entre 2 voies Résolution Question 22. Codeur incrémental Codeur Absolu Nombre d'entrées automate Question 23. Type de codeur Question 24. Référence Codeur
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
INSTALLATIONS INDUSTRIELLES
 Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Notions fondamentales sur le démarrage des moteurs
 Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Machine à courant continu
 Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
Remplacement de composants de régulateurs RETROFIT
 Remplacement de composants de régulateurs RETROFIT SCHAKO KG Steigstraße 25-27 D-78600 Kolbingen Téléphone +49 (0) 74 63-980 - 0 Téléfax +49 (0) 74 63-980 - 200 info@schako.de www.schako.de Sommaire Introduction
Remplacement de composants de régulateurs RETROFIT SCHAKO KG Steigstraße 25-27 D-78600 Kolbingen Téléphone +49 (0) 74 63-980 - 0 Téléfax +49 (0) 74 63-980 - 200 info@schako.de www.schako.de Sommaire Introduction
0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N
 Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
NO-BREAK KS. Système UPS dynamique PRÉSENTATION
 NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIQUE : ÉLÉMENTS DE CORRIGÉ. Partie A : alimentation HTA
 ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
Driver de moteurs pas-à-pas DM432C
 Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Driver de moteurs pas-à-pas DM432C 1. Introduction Le DM432C de Leadshine est un driver digital de moteurs pas-à-pas basé sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de
Notice d'utilisation Capteur de niveau TOR. LI214x 704776/00 10/2010
 Notice d'utilisation Capteur de niveau TOR LI214x FR 704776/00 10/2010 Contenu 1 Remarque préliminaire 3 1.1 Symboles utilisés 3 2 Consignes de sécurité 3 3 Fonctionnement et caractéristiques 4 3.1 Application
Notice d'utilisation Capteur de niveau TOR LI214x FR 704776/00 10/2010 Contenu 1 Remarque préliminaire 3 1.1 Symboles utilisés 3 2 Consignes de sécurité 3 3 Fonctionnement et caractéristiques 4 3.1 Application
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
DOCUMENT RESSOURCE SONDES PRESENTATION
 Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
FIRE CONTROL VENTOUSES ÉLECTROMAGNÉTIQUES
 fire control 31 32 FIRE CONTROL VENTOUSES ÉLECTROMAGNÉTIQUES 01620 01620I 01630 01630I 01820 01820I 01830 01830I Ventouse électromagnétique Corps ventouse à dos fileté M8 Dimensions ventouse : diamètre
fire control 31 32 FIRE CONTROL VENTOUSES ÉLECTROMAGNÉTIQUES 01620 01620I 01630 01630I 01820 01820I 01830 01830I Ventouse électromagnétique Corps ventouse à dos fileté M8 Dimensions ventouse : diamètre
Multitension Monofonction. Multitension Multifonction
 Série - Relais temporisés modulaires 16 A SERIE Caractéristiques.01.11 Relais temporisés multifonction et monofonction.01 - Multifonction et multitension.11 - Temporisé à la mise sous tension, multitension
Série - Relais temporisés modulaires 16 A SERIE Caractéristiques.01.11 Relais temporisés multifonction et monofonction.01 - Multifonction et multitension.11 - Temporisé à la mise sous tension, multitension
COMMANDER la puissance par MODULATION COMMUNIQUER
 SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
4.4. Ventilateurs à filtre. Les atouts. Montage rapide. Polyvalence et fonctionnalité
 Les atouts L'utilisation de ventilateurs à filtre est une méthode extrêmement économique pour évacuer d'importantes quantités de chaleur en dehors des armoires électriques. Deux conditions fondamentales
Les atouts L'utilisation de ventilateurs à filtre est une méthode extrêmement économique pour évacuer d'importantes quantités de chaleur en dehors des armoires électriques. Deux conditions fondamentales
Entraînements personnalisés
 67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
67 F Votre idée - Notre motivation Depuis le concept de l'entraînement, en passant par le développement et la conception, la réalisation de prototypes dans nos ateliers, les essais en laboratoire, et jusqu
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
2 La technologie DTC ou le contrôle direct de couple Guide technique No. 1
 ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
MODE D EMPLOI Boitier de programmation SKY300046-01
 MODE D EMPLOI Boitier de programmation SKY300046-01 INTRODUCTION Merci d avoir fait l acquisition du Boitier de programmation SkyRc (SKY300046-01). Veuillez lire complètement et attentivement ce manuel
MODE D EMPLOI Boitier de programmation SKY300046-01 INTRODUCTION Merci d avoir fait l acquisition du Boitier de programmation SkyRc (SKY300046-01). Veuillez lire complètement et attentivement ce manuel
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
MultiPlus sans limites
 MultiPlus sans limites La maîtrise de l'énergie avec le Phoenix Multi/MultiPlus de Victron Energy Parfois les possibilités offertes par un nouveau produit sont si uniques qu'elles sont difficiles à comprendre,
MultiPlus sans limites La maîtrise de l'énergie avec le Phoenix Multi/MultiPlus de Victron Energy Parfois les possibilités offertes par un nouveau produit sont si uniques qu'elles sont difficiles à comprendre,
LES CAPTEURS TOUT OU RIEN
 LES CAPTEURS TOUT OU RIEN SOMMAIRE Généralités...3 Caractéristiques générales...4 Les capteurs mécaniques : principe...5 Les capteurs mécaniques : avantages et utilisation...6 Les capteurs mécaniques :
LES CAPTEURS TOUT OU RIEN SOMMAIRE Généralités...3 Caractéristiques générales...4 Les capteurs mécaniques : principe...5 Les capteurs mécaniques : avantages et utilisation...6 Les capteurs mécaniques :
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
VMT Mod : Ventilation modulée pour le tertiaire
 Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
L'intégration et le montage d'appareillages électriques doivent être réservés à des électriciens
 Automate d'éclairage de cage d'escaliers rail DIN N de commande : 0821 00 Module à impulsion N de commande : 0336 00 Manuel d utilisation 1 Consignes de sécurité L'intégration et le montage d'appareillages
Automate d'éclairage de cage d'escaliers rail DIN N de commande : 0821 00 Module à impulsion N de commande : 0336 00 Manuel d utilisation 1 Consignes de sécurité L'intégration et le montage d'appareillages
Relais statiques SOLITRON, 1 ou 2 pôles Avec dissipateur intégré
 Relais statiques SOLITRON, 1 ou 2 pôles Avec dissipateur intégré Relais statique CA, 1 ou 2 pôles Commutation au zéro de tension pour applications de chauffage et de moteur (RN1A) Commutation instantanée
Relais statiques SOLITRON, 1 ou 2 pôles Avec dissipateur intégré Relais statique CA, 1 ou 2 pôles Commutation au zéro de tension pour applications de chauffage et de moteur (RN1A) Commutation instantanée
INSTALLATIONS ÉLECTRIQUES CIVILES
 index ALIMENTATION MONOPHASEE ALIMENTATION MONOPHASEE ALIMENTATIONS DL 2101ALA DL 2101ALF MODULES INTERRUPTEURS ET COMMUTATEURS DL 2101T02RM INTERRUPTEUR INTERMEDIAIRE DL 2101T04 COMMUTATEUR INTERMEDIAIRE
index ALIMENTATION MONOPHASEE ALIMENTATION MONOPHASEE ALIMENTATIONS DL 2101ALA DL 2101ALF MODULES INTERRUPTEURS ET COMMUTATEURS DL 2101T02RM INTERRUPTEUR INTERMEDIAIRE DL 2101T04 COMMUTATEUR INTERMEDIAIRE
W 12-2 : haute performance et savoir-faire compact
 Barrières W - Détecteurs réflex, élimination de premier plan EPP Détecteurs réflex, élimination d arrière-plan EAP W - : haute performance et savoir-faire compact Détecteurs réflex énergétiques fibres
Barrières W - Détecteurs réflex, élimination de premier plan EPP Détecteurs réflex, élimination d arrière-plan EAP W - : haute performance et savoir-faire compact Détecteurs réflex énergétiques fibres
7200S FRA. Contacteur Statique. Manuel Utilisateur. Contrôle 2 phases
 7200S Contacteur Statique FRA Contrôle 2 phases Manuel Utilisateur Chapitre 2 2. INSTALLATI Sommaire Page 2.1. Sécurité lors de l installation...............................2-2 2.2. Montage.................................................2-3
7200S Contacteur Statique FRA Contrôle 2 phases Manuel Utilisateur Chapitre 2 2. INSTALLATI Sommaire Page 2.1. Sécurité lors de l installation...............................2-2 2.2. Montage.................................................2-3
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
CHARGE ACTIVE. Banc d'essais de machines tournantes. Notice d'instruction. Cette notice doit être transmise. à l'utilisateur final
 4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
4226 fr - 2010.01 / b T Cette notice doit être transmise à l'utilisateur final 15 10 5 n 0 30 60 90 120 Notice d'instruction PREAMBULE AUTOCERTIFICATION CE suivant la Directive "Machines" : directive 89/392
14.01 14.71. 6 fonctions 1 NO Montage sur rail 35 mm (EN 60715) 16/30 (120 A - 5 ms) 16/30 (120 A - 5 ms) Tension nom./tension max.
 16/30 (120 A - 5 ms) 16/30 (120 A - 5 ms) Tension nom./tension max.") Série 14 - Minuteries cage d escalier 16 A SERE 14 Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis
Série 14 - Minuteries cage d escalier 16 A SERE 14 Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis
BU 0700. NORDAC SK 700E Manuel relatif au variateur de fréquence
 FR BU 0700 NORDAC SK 700E Manuel relatif au variateur de fréquence Manuel NORDAC SK 700E Variateur de fréquence N O R D A C SK 700E Consignes de sécurité et d utilisation relatives aux variateurs de fréquence
FR BU 0700 NORDAC SK 700E Manuel relatif au variateur de fréquence Manuel NORDAC SK 700E Variateur de fréquence N O R D A C SK 700E Consignes de sécurité et d utilisation relatives aux variateurs de fréquence
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN. Machine à commande numérique destinée au tronçonnage des dés.
 MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
MACHINES DE SCIAGE ET TRONCONNAGE MACHINES SPECIALES R 80 CN Machine à commande numérique destinée au tronçonnage des dés. 2350 4792 - Hauteur : 1730 mm - Poids : 1052 kg Chevrons Longueur maxi * : 3 m
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
Mathématiques et petites voitures
 Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
Mathématiques et petites voitures Thomas Lefebvre 10 avril 2015 Résumé Ce document présente diérentes applications des mathématiques dans le domaine du slot-racing. Table des matières 1 Périmètre et circuit
GENERALITES SUR LA MESURE DE TEMPERATURE
 Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
Distributeur exclusif de GENERALITES SUR LA MESURE DE TEMPERATURE INTRODUCTION...2 GENERALITES SUR LA MESURE DE TEMPERATURE...2 La température...2 Unités de mesure de température...3 Echelle de température...3
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
Ce document a été numérisé par le CRDP de Montpellier pour la Base Nationale des Sujets d Examens de l enseignement professionnel
 Ce document a été numérisé par le CRDP de Montpellier pour la Base Nationale des Sujets d Examens de l enseignement professionnel Ce fichier numérique ne peut être reproduit, représenté, adapté ou traduit
Ce document a été numérisé par le CRDP de Montpellier pour la Base Nationale des Sujets d Examens de l enseignement professionnel Ce fichier numérique ne peut être reproduit, représenté, adapté ou traduit
L'intégration et le montage d'appareillages électriques doivent être réservés à des électriciens
 quadruple 230 V N de commande : 1067 00 N de commande : 1069 00 sextuple 24 V N de commande : 1068 00 Manuel d utilisation 1 Consignes de sécurité L'intégration et le montage d'appareillages électriques
quadruple 230 V N de commande : 1067 00 N de commande : 1069 00 sextuple 24 V N de commande : 1068 00 Manuel d utilisation 1 Consignes de sécurité L'intégration et le montage d'appareillages électriques
NPIH800 GENERATION & RESEAUX. PROTECTION de COURANT TERRE
 GENERATION & RESEAUX PROTECTION de COURANT TERRE NPIH800 assure la protection à maximum de courant terre des réseaux électriques de moyenne et haute tension. Ce relais multifonction surveille les défauts
GENERATION & RESEAUX PROTECTION de COURANT TERRE NPIH800 assure la protection à maximum de courant terre des réseaux électriques de moyenne et haute tension. Ce relais multifonction surveille les défauts
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BD 302 MINI. Etage de puissance pas à pas en mode bipolaire. Manuel 2059-A003 F
 BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F phytron BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F Manuel BD 302 MINI 2002 Tous droits
BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F phytron BD 302 MINI Etage de puissance pas à pas en mode bipolaire Manuel 2059-A003 F Manuel BD 302 MINI 2002 Tous droits
CONTRÔLE DE BALISES TYPE TB-3 MANUEL D'INSTRUCTIONS. ( Cod. 7 71 087 ) (M 981 342 01-02 06H) ( M 981 342 / 99G ) (c) CIRCUTOR S.A.
 (M 981 342 01-02 06H) ( M 981 342 / 99G ) (c) CIRCUTOR S.A.") CONTRÔLE DE BALISES TYPE TB-3 ( Cod. 7 71 087 ) MANUEL D'INSTRUCTIONS (M 981 342 01-02 06H) ( M 981 342 / 99G ) (c) CIRCUTOR S.A. ------ ÉQUIPEMENT CONTRÔLE DE BALISES TB-3 ------ Page 2 de 6 ÉQUIPEMENT
CONTRÔLE DE BALISES TYPE TB-3 ( Cod. 7 71 087 ) MANUEL D'INSTRUCTIONS (M 981 342 01-02 06H) ( M 981 342 / 99G ) (c) CIRCUTOR S.A. ------ ÉQUIPEMENT CONTRÔLE DE BALISES TB-3 ------ Page 2 de 6 ÉQUIPEMENT
Neu. Technique d installation / de surveillance. VARIMETER RCM Contrôleur différentiel type B IP 5883
 Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
J TB/TW Limiteur de température, contrôleur de température avec afficheur LCD, montage sur rail oméga 35 mm
 JUMO GmbH & Co. KG Adresse de livraison : Mackenrodtstraße 14, 36039 Fulda, Allemagne Adresse postale : 36035 Fulda, Allemagne Téléphone : +49 661 6003-0 Télécopieur : +49 661 6003-607 E-Mail : mail@jumo.net
JUMO GmbH & Co. KG Adresse de livraison : Mackenrodtstraße 14, 36039 Fulda, Allemagne Adresse postale : 36035 Fulda, Allemagne Téléphone : +49 661 6003-0 Télécopieur : +49 661 6003-607 E-Mail : mail@jumo.net
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE SÉRIE 8036
 A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
Siège d escalier. Pinnacle. www.atlasescalateurs.qc.ca. Produits fabriqués au Québec. escalateur/élévateur. escalateur/élévateur
 Siège d escalier Pinnacle Produits fabriqués au Québec Fiche technique Fiabilité Le témoin lumineux se trouvant sur l accoudoir permet d identifier facilement et rapidement les situations qui nécessitent
Siège d escalier Pinnacle Produits fabriqués au Québec Fiche technique Fiabilité Le témoin lumineux se trouvant sur l accoudoir permet d identifier facilement et rapidement les situations qui nécessitent
CIRCUIT DE CHARGE BOSCH
 LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
Système de contrôle TS 970
 Système de contrôle TS 970 Le système de contrôle TS 970 est fourni de manière standard. Ce système de contrôle est préparé à accueillir différents éléments de commande. Spécifications techniques du système
Système de contrôle TS 970 Le système de contrôle TS 970 est fourni de manière standard. Ce système de contrôle est préparé à accueillir différents éléments de commande. Spécifications techniques du système
F210. Automate de vision hautes fonctionnalités. Caractèristiques. Algorithmes vectoriels
 Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
ventilation Caisson de ventilation : MV
 ventilation Caisson de ventilation : MV FTE 101 148 C Septembre 2012 MV caisson de ventilation économique Descriptif technique Encombrement, réservation et poids Ø X Y Z H h A B Poids (kg) MV5-6P 248 450
ventilation Caisson de ventilation : MV FTE 101 148 C Septembre 2012 MV caisson de ventilation économique Descriptif technique Encombrement, réservation et poids Ø X Y Z H h A B Poids (kg) MV5-6P 248 450
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P
 Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
1. Les différents types de postes de livraison On peut classer les postes HTA/BT en deux catégories.
 2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
DOSSIER TECHNIQUE R-GO SPA. Production et assemblage 100 % Française. 3 Rue Pierre Mendès France 61200 ARGENTAN
 DOSSIER TECHNIQUE R-GO SPA R-GO SPA Production et assemblage 100 % Française 1 Implantation technique Il faut retenir que la partie technique a un encombrement total de 250 cm par 90 cm au minimum, et
DOSSIER TECHNIQUE R-GO SPA R-GO SPA Production et assemblage 100 % Française 1 Implantation technique Il faut retenir que la partie technique a un encombrement total de 250 cm par 90 cm au minimum, et
Caractéristiques techniques
 Marque de commande Caractéristiques Possibilité de positionner la tête du détecteur par rotations successives 40 mm, non noyable Fixation rapide Propre à l'emploi jusqu'à SIL 2 selon IEC 61508 Accessoires
Marque de commande Caractéristiques Possibilité de positionner la tête du détecteur par rotations successives 40 mm, non noyable Fixation rapide Propre à l'emploi jusqu'à SIL 2 selon IEC 61508 Accessoires
Le triac en commutation : Commande des relais statiques : Princ ipe électronique
 LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
Multifonction 1 NO Montage sur rail 35 mm (EN 60715)
") Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis d'extinction (modèle 14.01) révue pour installations
Caractéristiques 14.01 14.71 Gamme de minuteries cage d'escalier Largeur un module 17.5 mm lage de temps de 30s à 20min Commutation zéro crossing réavis d'extinction (modèle 14.01) révue pour installations
Systèmes d entraînement \ Systèmes d automatisation \ Intégration de systèmes \ Services. Manuel. MOVITRAC LTP B Sécurité fonctionnelle
 Systèmes d entraînement \ Systèmes d automatisation \ Intégration de systèmes \ Services Manuel MOVITRAC LTP B Sécurité fonctionnelle Version 10/2013 20225768 / FR SEW-EURODRIVE Driving the world Sommaire
Systèmes d entraînement \ Systèmes d automatisation \ Intégration de systèmes \ Services Manuel MOVITRAC LTP B Sécurité fonctionnelle Version 10/2013 20225768 / FR SEW-EURODRIVE Driving the world Sommaire
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système M-Bus NIEVEAU TERRAIN NIVEAU AUTOMATION NIVEAU GESTION. Domaines d'application
 5 657 ENERGY MONITORING ET CONTROLLING EMC MeterProxy pour M-Bus CSM30.001 L'Energy Monitoring & Controlling EMC est un outil de gestion d'énergie d'utilisation aisée pour la surveillance et le contrôle
5 657 ENERGY MONITORING ET CONTROLLING EMC MeterProxy pour M-Bus CSM30.001 L'Energy Monitoring & Controlling EMC est un outil de gestion d'énergie d'utilisation aisée pour la surveillance et le contrôle
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
MODULE DIN RELAIS TECHNICAL SPECIFICATIONS RM1-230. Basse tension : Voltage : Nominal 12 Vdc, Maximum 14 Vdc
 RM1 Notice Technique DESCRIPTION MODULE DIN RELAIS Le module RM1 de la famille DIN permet de contrôler des charges diverses en les plaçant sous/hors tension. Il peut être contrôlé localement par un interrupteur
RM1 Notice Technique DESCRIPTION MODULE DIN RELAIS Le module RM1 de la famille DIN permet de contrôler des charges diverses en les plaçant sous/hors tension. Il peut être contrôlé localement par un interrupteur
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Modules d automatismes simples
 Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Solutions pour la mesure. de courant et d énergie
 Solutions pour la mesure de courant et d énergie Mesure et analyse de signal Solutions WAGO pour la surveillance et l économie d énergie Boucles de mesure Rogowski, série 855 pour la mesure non intrusive
Solutions pour la mesure de courant et d énergie Mesure et analyse de signal Solutions WAGO pour la surveillance et l économie d énergie Boucles de mesure Rogowski, série 855 pour la mesure non intrusive
Cette notice doit être transmise à l'utilisateur final EUR. 3897 fr - 2013.08 / g 0 V. Entrée courant référence de vitesse à distance (A1)
") 3897 fr - 2013.08 / g EUR T1 0 V Référence Vitesse à distance T2 Entrée courant référence de vitesse à distance (A1) T3 Sortie référence +10 V Cette notice doit être transmise à l'utilisateur final +24
3897 fr - 2013.08 / g EUR T1 0 V Référence Vitesse à distance T2 Entrée courant référence de vitesse à distance (A1) T3 Sortie référence +10 V Cette notice doit être transmise à l'utilisateur final +24
Triphasé 400 V 0.4-630 kw. Variateur multifonction haute performance
 Triphasé 400 V 0.4-630 kw Variateur multifonction haute performance Des performances à la pointe de l industrie The performance reaching the peak in the industry En rassemblant le meilleur de ces technologies,
Triphasé 400 V 0.4-630 kw Variateur multifonction haute performance Des performances à la pointe de l industrie The performance reaching the peak in the industry En rassemblant le meilleur de ces technologies,
Vannes 3 voies avec filetage extérieur, PN 16
 4 464 Vannes 3 voies avec filetage extérieur, PN 6 VXG44... Corps en bronze CC49K (Rg5) DN 5...DN 40 k vs 0,25...25 m 3 /h Corps filetés avec étanchéité par joint plat G selon ISO 228/ Des raccords à vis
4 464 Vannes 3 voies avec filetage extérieur, PN 6 VXG44... Corps en bronze CC49K (Rg5) DN 5...DN 40 k vs 0,25...25 m 3 /h Corps filetés avec étanchéité par joint plat G selon ISO 228/ Des raccords à vis
Chapitre N 8. Copyright LGM DEPANNAGE ELECTRIQUE : 1- Procéder avec méthode pour tester un circuit : 2: Contrôle de la continuité:
 - Procéder avec méthode pour tester un circuit : DEPANNAE EECTRIQUE : : Contrôle de la continuité: : Contrôle sous tension: - Exercices : Chapitre N 8 5- Utilisation du grafcet, du gemma comme outils de
- Procéder avec méthode pour tester un circuit : DEPANNAE EECTRIQUE : : Contrôle de la continuité: : Contrôle sous tension: - Exercices : Chapitre N 8 5- Utilisation du grafcet, du gemma comme outils de
GROUPE HOLDIM Leader mondial de l optimisation moteur. DYNORACE 2WD /DF2 Banc 2 roues motrices. Banc de puissance Disponible en 3 versions :
 BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
BANCS DE PUISSANCE Banc de puissance Disponible en 3 versions : Inertiel /DF2is Inertiel /DF2i Freiné /DF2fs Avec un frein à courant de Foucault 3 GROUPE HOLDIM Leader mondial de l optimisation moteur
Module de mesure de courant pour relais statiques serie HD Module de mesure de courant HD D0340I
 Plage de tension de commande: 4... 30 VDC Plage de courant de charge: 2 A... 40 A Controle permanent de courant Apprentissage du courant de consigne par bouton poussoir ou par entrée externe Seuil d'alarme
Plage de tension de commande: 4... 30 VDC Plage de courant de charge: 2 A... 40 A Controle permanent de courant Apprentissage du courant de consigne par bouton poussoir ou par entrée externe Seuil d'alarme