TEPZZ _9988B_T EP B1 (19) (11) EP B1 (12) FASCICULE DE BREVET EUROPEEN
|
|
|
- Edgar Brunet
- il y a 8 ans
- Total affichages :
Transcription
1 (19) TEPZZ _9988B_T (11) EP B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: Bulletin 13/1 (21) Numéro de dépôt: (22) Date de dépôt: (1) Int Cl.: B66C 13/06 (06.01) B66C 13/48 (06.01) G0D 19/02 (06.01) (86) Numéro de dépôt international: PCT/EP08/06696 (87) Numéro de publication internationale: WO 09/06808 ( Gazette 09/22) (4) DISPOSITIF ET PROCEDE DE REGULATION DU DEPLACEMENT D UNE CHARGE SUSPENDUE VERFAHREN UND VORRICHTUNG ZUR STEUERUNG DER BEWEGUNG EINER AUFGEHÄNGTEN LAST DEVICE AND METHOD FOR REGULATING THE DISPLACEMENT OF A SUSPENDED LOAD (84) Etats contractants désignés: AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR () Priorité: FR (43) Date de publication de la demande: Bulletin /34 (73) Titulaire: Schneider Toshiba Inverter Europe SAS 271 Pacy sur Eure (FR) (72) Inventeur: STANTCHEV, Pentcho F Fourqueux (FR) (74) Mandataire: Dufresne, Thierry Schneider Electric Industries SAS Service Propriété Industrielle 3 rue Joseph Monier - CS Rueil-Malmaison Cedex (FR) (6) Documents cités: FR-A FR-A US-A US-A US-A EP B1 Il est rappelé que: Dans un délai de neuf mois à compter de la publication de la mention de la délivrance du brevet européen au Bulletin européen des brevets, toute personne peut faire opposition à ce brevet auprès de l'office européen des brevets, conformément au règlement d'exécution. L'opposition n'est réputée formée qu'après le paiement de la taxe d'opposition. (Art. 99(1) Convention sur le brevet européen). Printed by Jouve, 7001 PARIS (FR)
 Etats contractants désignés:")
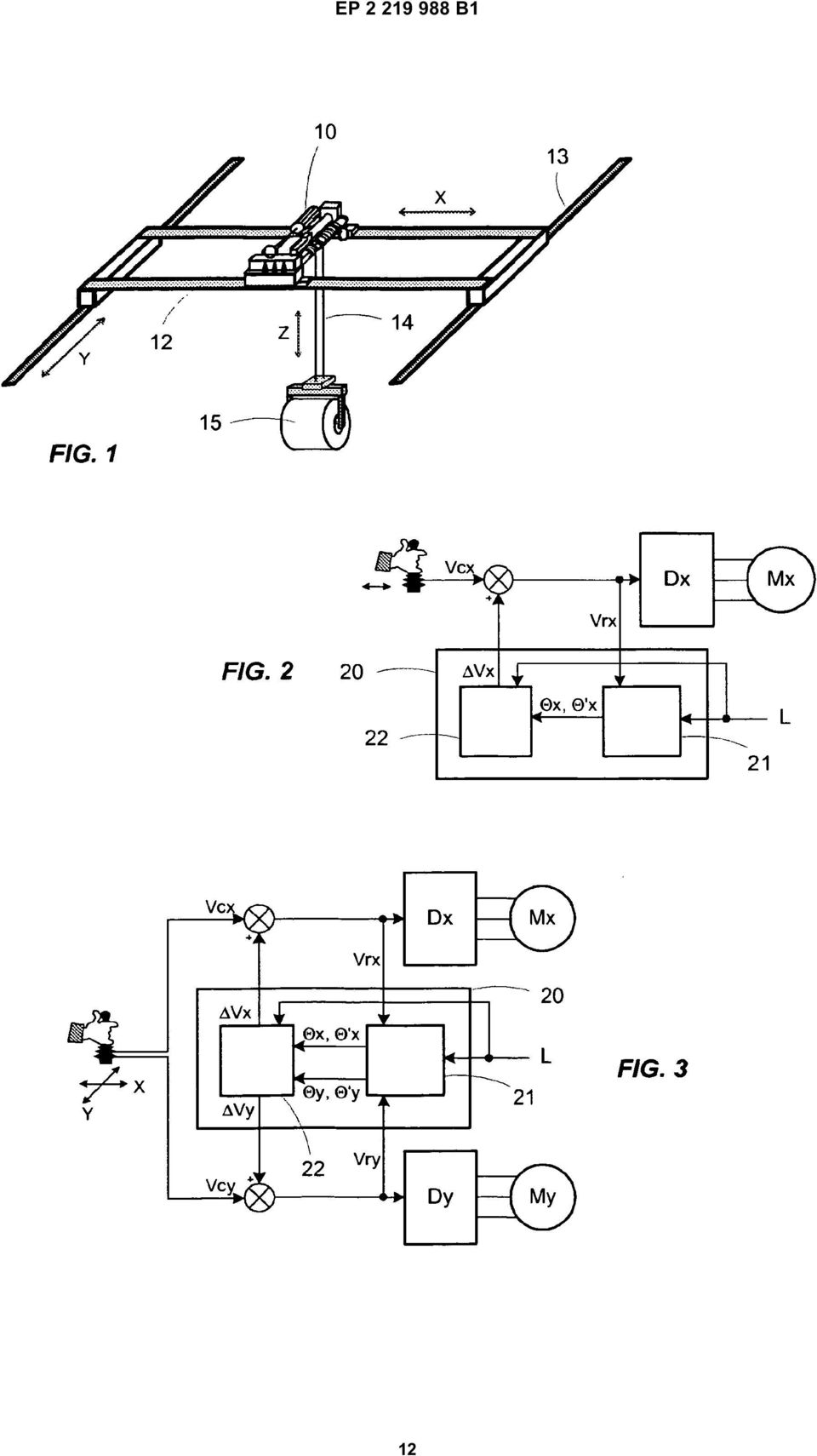
2 Description [0001] La présente invention se rapporte à un dispositif de régulation et à un procédé de régulation du déplacement d une charge suspendue par câbles à un chariot mobile dans un engin de levage. [0002] Les engins de levage tels que portiques, grues ou ponts roulants comprennent habituellement un chariot qui est déplaçable sur des rails selon un axe horizontal X. Ce premier mouvement selon l axe X est généralement appelé mouvement de direction (Trolley ou Short travel movement). Suivant le type d engins, ces rails peuvent en plus être parfois eux-mêmes mobiles selon un axe horizontal Y perpendiculaire à l axe X, permettant ainsi au chariot de pouvoir se déplacer suivant les axes X et Y. Ce second mouvement selon l axe Y est généralement appelé mouvement de translation (Crane ou Long travel movement). Un dispositif de suspension de la charge est associé à des câbles qui transitent par le chariot, la longueur des câbles étant susceptible de varier de façon à pouvoir déplacer la charge selon un axe vertical Z, appelé mouvement de levage (Hoisting movement). [0003] La manutention d une charge par un engin de levage entraîne des balancements de la charge qu il est évidemment souhaitable d amortir pour effectuer en douceur et en toute sécurité le transfert de la charge et cela, dans un laps de temps le plus court possible. Ces balancements sont générés par l accélération du ou des mouvements horizontaux du chariot selon les axes X et/ou Y, et leur fréquence d oscillation dépend de la longueur des câbles. Il existe déjà plusieurs solutions pour diminuer automatiquement l angle du ballant d une telle charge suspendue. [0004] Le document FR décrit un dispositif de régulation du transfert d une charge suspendue qui permet d agir sur la commande de déplacement du chariot à partir des corrections de la position du chariot et de l angle du ballant. L angle du ballant est mesuré périodiquement au moyen de capteurs associés au chariot et à la charge. La nécessité de mesures périodiques de l angle du ballant entraîne l utilisation permanente de capteurs d angle. Or, ceux-ci sont souvent utilisés dans un environnement extérieur ou agressif tel qu un milieu sidérurgique par exemple qui présente une température ambiante élevée. Une maintenance suivie des capteurs est donc nécessaire pour leur entretien. [000] Pour pallier à la présence permanente d un capteur d angle de ballant en phase d exploitation, le document FR décrit un procédé de régulation comprenant une première phase initiale de modélisation ou d identification par apprentissage d une fonction de transfert propre à l engin à réguler en utilisant les informations fournies par un capteur d angle du ballant, puis une seconde phase d exploitation dans laquelle cette fonction de transfert ainsi déterminée permet alors de réguler la charge suspendue sangs l utilisation de capteur d angle du ballant. Ainsi, on peut s affranchir notamment des problèmes d environnement et de maintenance du capteur. La mise en oeuvre d un tel procédé reste néanmoins assez complexe à cause de l existence de cette phase initiale de modélisation ou d apprentissage. [0006] Par ailleurs, le document US44366 décrit un dispositif électronique de contrôle de ballant (ou "antisway control") qui notamment utilise comme paramètre variable d entrée la force d accélération du chariot, grâce à une mesure en temps réel du courant circulant dans le moteur chargé d effectuer le mouvement horizontal du chariot. Cette mesure de courant rend plus complexe le dispositif de régulation du balancement de la charge et rend plus difficile l implantation d un tel dispositif dans un équipement d automatisme physiquement éloigné du variateur de vitesse de déplacement du chariot. De plus, la valeur du courant ou du couple moteur peut dépendre du poids de la charge suspendue, alors que le ballant ne dépend pas du poids de la charge. Or comme ce poids n est pas connu, l utilisation d un courant moteur dans l algorithme de calcul du ballant peut donc entraîner des imprécisions dans la correction du ballant. [0007] Le document US décrit un procédé de commande de grue basé sur une solution de double rampe pour amortir le ballant. [0008] C est pourquoi l invention a pour but de maîtriser les oscillations d une charge suspendue lors de son transfert, en utilisant un dispositif et un procédé simple, rapide et facile à mettre en oeuvre. Elle permet de minimiser les mesures ou les prises d information qui sont nécessaires pour effectuer le contrôle et la maitrise du ballant d une charge. [0009] Pour cela, l invention décrit un dispositif de régulation du déplacement d une charge suspendue par câbles à un chariot qui est mobile selon un premier axe horizontal dans un engin de levage, le dispositif comprenant des moyens de détermination d une longueur des câbles de suspension de la charge et des moyens de détermination d une information représentative d une vitesse de déplacement du chariot selon le premier axe. Le dispositif de régulation calcule un premier angle de ballant de la charge et une vitesse dudit premier angle de ballant en utilisant uniquement ladite longueur et ladite information représentative de la vitesse de déplacement selon le premier axe comme seules variables d entrée, et en utilisant une accélération dudit premier angle de ballant comme variable interne [00] Selon une caractéristique, le dispositif de régulation calcule le premier angle de ballant à l aide d un processus itératif utilisant la vitesse et l accélération dudit premier angle de ballant. [0011] Selon une caractéristique, l information représentative de la vitesse de déplacement du chariot selon le premier axe est déterminée en utilisant une référence de vitesse qui est fournie à un variateur de vitesse pilotant le déplacement du chariot selon le premier axe. Alternativement, l information représentative de la vitesse de déplacement du chariot selon le premier axe est déterminée en utilisant une estimation de vitesse qui est élaborée par un variateur de vitesse pilotant le déplacement du chariot selon le premier axe. 2

3 1 2 [0012] Selon une autre caractéristique, le dispositif de régulation délivre un signal de correction qui est ajouté à une consigne de vitesse pour fournir une référence de vitesse de déplacement du chariot selon le premier axe. Le signal de correction est calculé en appliquant un coefficient de correction au premier angle de ballant calculé et un coefficient de correction à la vitesse calculée du premier angle de ballant. Les coefficients de correction sont préférentiellement variables en fonction de la longueur des câbles de suspension de la charge. [0013] Selon une autre caractéristique, le chariot est également mobile selon un second axe horizontal perpendiculaire au premier axe. Le dispositif de régulation comporte des moyens pour déterminer une information représentative d une vitesse de déplacement du chariot selon le second axe et calcule un second angle de ballant de la charge et une vitesse dudit second angle de ballant en utilisant uniquement ladite longueur et ladite information représentative de la vitesse de déplacement selon le second axe comme seules variables d entrée, et en utilisant une accélération dudit second angle de ballant comme variable interne. [0014] Selon une autre caractéristique, le chariot est également mobile selon un second axe horizontal perpendiculaire au premier axe, et comprend des moyens pour déterminer une vitesse de déplacement du chariot selon le second axe. Le dispositif de régulation calcule un second angle de ballant de la charge et une vitesse dudit second angle de ballant en utilisant uniquement la longueur des câbles et la vitesse de déplacement selon le second axe comme seules variables d entrée. [001] L invention décrit également un procédé de régulation du déplacement d une charge suspendue par câbles à un chariot qui est mobile selon au moins un axe horizontal dans un engin de levage. Le procédé de régulation est mis en oeuvre par le dispositif de régulation et comporte une étape de calcul permettant de déterminer un angle de ballant de la charge et une vitesse de l angle de ballant en utilisant uniquement comme seules variables d entrée une longueur des câbles de suspension de la charge et une information représentative d une vitesse de déplacement du chariot, et en utilisant une accélération dudit angle de ballant comme variable interne. [0016] Selon une autre caractéristique, le procédé de régulation calcule l angle de ballant à l aide d un processus itératif utilisant la vitesse dudit angle de ballant et de l accélération dudit angle de ballant. Le procédé de régulation ne comporte pas d étape préalable de modélisation. L étape de calcul utilise un modèle mathématique de pendule avec amortissement. [0017] D autres caractéristiques et avantages vont apparaître dans la description détaillée qui suit en se référant à un mode de réalisation donné à titre d exemple et représenté par les dessins annexés sur lesquels : la figure 1 montre un exemple connu d un engin de levage d une charge suspendue de type pont roulant, - la figure 2 représente un schéma simplifié d un dispositif de régulation conforme à l invention du déplacement d une charge selon un seul axe horizontal, - la figure 3 représente un schéma simplifié d un dispositif de régulation conforme à l invention du déplacement d une charge selon deux axes horizontaux. [0018] Le dispositif de régulation du déplacement d une charge suspendue selon l invention peut être mis en oeuvre dans un engin de levage tel que pont roulant, portique ou analogue. L exemple de la figure 1 montre un engin de type pont roulant qui comporte un chariot. Le chariot peut effectuer un premier mouvement selon un premier axe horizontal X. Ce premier mouvement, appelé mouvement de direction, s effectue sur deux rails horizontaux 12. L ensemble composé du chariot et des rails 12 est mobile sur des rails 13 selon un second axe horizontal Y, perpendiculaire à l axe de direction X, pour effectuer un mouvement appelé mouvement de translation. Par ailleurs, l engin est capable d effectuer un mouvement de levage selon un axe vertical Z pour soulever et descendre une charge 1 suspendue par un ou plusieurs câbles de levage 14 qui transitent par le chariot et au bout desquels est associé un organe de suspension de la charge 1. [0019] Le mouvement de direction selon l axe X est effectué grâce à un moteur Mx piloté par un variateur de vitesse Dx qui reçoit une référence de vitesse Vrx (voir figure 2). De même, le mouvement de translation selon l axe Y est effectué grâce à un moteur My piloté par un variateur de vitesse Dy qui reçoit une référence de vitesse Vry (voir figure 3). Le mouvement de levage selon l axe Z est effectué grâce à un moteur de levage non représenté sur les figures qui permet d enrouler et de dérouler les câbles de suspension. Ce moteur de levage peut être placé sur le chariot. [00] Le mouvement de direction X, respectivement de translation Y, est commandé par le conducteur de l engin de levage, ce conducteur fournissant un signal de consigne de vitesse de direction Vcx, respectivement un signal de consigne de vitesse de translation Vcy, à l aide par exemple de combinateur(s) - de type joystick, comme indiqué sur les figures 2 & 3. Néanmoins, dans certaines applications où les engins de levage seraient pilotés en automatique, on pourrait aussi envisager que les consignes de vitesse Vcx, Vcy proviennent directement d un équipement d automatisme. [0021] A cause du mouvement de levage, la charge 1 suspendue par les câbles 14 présente évidemment une hauteur variable en fonction de la longueur L des câbles de suspension. Cette hauteur de suspension de la charge sera assimilée à la longueur des câbles L, à laquelle on pourrait éventuellement ajouter un offset représentant la distance entre l extrémité basse des câbles 14 et la charge 1 (matérialisée par exemple par son centre de gravité). 3

4 1 [0022] En raison d effets perturbateurs, principalement dus à l accélération et au freinage du chariot selon l axe X et/ou selon l axe Y, la charge 1 prend un mouvement pendulaire appelé ballant qui est défini par un angle de ballant noté Θx, respectivement Θy, que forment les câbles par rapport à la verticale dans le plan vertical passant par l axe X, respectivement Y. Le but de l invention est d aider au pilotage de l engin de levage en amortissant de façon simple et automatique le ballant selon l axe X et/ou selon l axe Y durant le déplacement de la charge 1, de façon transparente pour le conducteur de l engin. Avantageusement, l invention ne nécessite pas de phase d apprentissage et ne nécessite pas de mesure de l angle de ballant Θx et/ou Θy, de mesure du courant moteur ou du couple moteur qui peuvent s avérer coûteuses et plus longues à mettre en oeuvre. [0023] En référence au mode de réalisation de la figure 2, le dispositif de régulation a pour but d amortir le mouvement oscillant de la charge 1 uniquement lors de son déplacement d une position à une autre selon l axe X, ce déplacement pouvant évidemment être effectué en même temps qu un mouvement de levage de la charge 1. [0024] Le dispositif de régulation comporte des moyens de détermination d une longueur L des câbles de suspension. Ces moyens de détermination comprennent par exemple un capteur ou codeur associé à l arbre du moteur de levage ou au tambour d enroulement des câbles. D autres moyens sont également envisageables : par exemple les moyens de détermination de la longueur L pourraient également comporter simplement plusieurs fins de course répartis sur l ensemble de la course des câbles, la longueur L étant alors déterminée par des valeurs paliers en fonction du déclenchement de ces fins de course. Cette solution est néanmoins moins précise évidemment. [002] Le dispositif de régulation comporte également des moyens de détermination d une information représentative de la vitesse de déplacement V X du chariot selon l axe de direction X. Cette information représentative de la vitesse de déplacement V X du chariot selon l axe X peut être déterminée de différentes façons : Selon une première variante, la vitesse de déplacement V X est obtenue par une mesure de la vitesse réelle de déplacement du chariot selon l axe X. Cette solution nécessite cependant l utilisation d un capteur de vitesse ou de déplacement du chariot selon l axe X. - Selon une deuxième variante, la vitesse de déplacement V X est obtenue directement par la référence de vitesse Vrx qui est fournie en entrée du variateur Dx en charge de piloter le moteur Mx entrainant le chariot dans l axe de direction X. On suppose dans ce cas que le variateur Dx assure le suivi de la référence vitesse avec une extrême rapidité. Cette solution est très simple à mettre en oeuvre car la référence de vitesse Vrx est facilement disponible. - Selon une troisième variante, la vitesse de déplacement V X est obtenue par une estimation de vitesse élaborée dans le variateur de vitesse Dx en charge de piloter le moteur Mx. Dans certains cas, cette estimation de vitesse est en effet plus proche de la vitesse réelle que la référence de vitesse Vrx, à cause de phénomènes tels que écart de suivi de rampe ou phénomènes mécaniques. Cette solution peut donc être intéressante notamment pour une application utilisant un moteur conique. Le paramètre interne au variateur d estimation de vitesse est souvent disponible sur une sortie analogique du variateur. [0026] Le dispositif de régulation comporte un module estimateur 21 relié à un module correcteur 22. Le module estimateur 21 reçoit en entrée la longueur L des câbles et la vitesse de déplacement V X du chariot selon l axe de direction X. Il calcule un premier angle de ballant Θx selon l axe X ainsi qu une vitesse (ou variation) Θ x de ce premier angle Θx. Les valeurs du premier angle de ballant Θx et de la vitesse Θ x sont ensuite transmises au module correcteur 22 qui calcule et délivre en sortie un signal de correction ΔVx qui est additionné à la consigne de vitesse Vcx du mouvement de direction. [0027] Pour calculer l angle de ballant Θx et la vitesse Θ x, l invention prévoit que le procédé de régulation utilise un modèle mathématique de pendule avec amortissement, qui répond à l équation suivante : 4 0 dans lequel : - L représente la longueur des câbles, - Vz représente la vitesse du mouvement de levage, calculée comme étant la dérivée de longueur L, - Θx représente le premier angle de ballant de la charge selon l axe de direction X, - Θ x représente la vitesse de l angle de ballant Θx (ou vitesse angulaire de la charge selon l axe X), - Θ"x représente l accélération de l angle de ballant Θx (ou accélération angulaire de la charge selon l axe X), - V x représente l accélération du mouvement de direction selon l axe X, calculée comme étant la dérivée de la vitesse de déplacement déterminée V x selon l axe X, - K f représente un coefficient de frottement fixe, 4

5 - g représente la pesanteur. [0028] On voit donc que le dispositif de régulation utilise l accélération Θ"x de l angle de ballant Θx comme variable interne et que les seules variables d entrée sont avantageusement la longueur des câbles L et la vitesse de déplacement Vx selon l axe X. [0029] L équation ci-dessus fait intervenir le premier angle de ballant Θx, la dérivée première Θ x de cet angle Θx et la dérivée seconde Θ"x de cet angle Θx. Le premier angle de ballant Θx est donc calculé à l aide d un processus itératif dans le temps qui utilise la vitesse Θ x et l accélération Θ"x. Ce processus itératif peut se représenter à tout instant t de la façon suivante : dans lesquelles Θx t et Θx t-1 représentent l angle de ballant selon l axe de direction X respectivement à un instant t et à un instant précédent t-1, Θ x t et Θ x t-1 représentent la vitesse de l angle de ballant Θx respectivement aux instants t et t-1, Θ"x t et Θ"x t-1 représentent l accélération de l angle de ballant Θx respectivement aux instants t et t-1, V x t représente l accélération du mouvement de direction à l instant t, Vx t et Vx t-1 représentent la vitesse de déplacement selon l axe X respectivement aux instants t et t-1, Vz t représente la vitesse du mouvement de levage à l instant t, L t et L t-1 représentent la longueur des câbles respectivement aux instants t et t-1 et Δt représente l écart de temps entre l instant t et l instant t-1. [00] Le processus itératif part de l hypothèse qu au démarrage du mouvement de direction, les valeurs de Θx, Θ x et Θ"x sont nulles, c est-à-dire qu à l instant t = 0, on a : Θx 0 = Θ x 0 = Θ"x 0 = 0. [0031] En référence au mode de réalisation de la figure 3, le dispositif de régulation a pour but d amortir le mouvement oscillant de la charge 1 lors de son déplacement selon l axe de direction X et l axe de translation Y, les déplacements suivant les axes X et Y pouvant évidemment être commandés simultanément par le conducteur et être effectués en même temps qu un mouvement de levage de la charge. [0032] Dans ce cas, le module estimateur 21 du dispositif de régulation reçoit en entrée la longueur L des câbles, la vitesse V X du chariot selon l axe de direction X ainsi que la vitesse V Y du chariot selon l axe de translation Y, déterminées par les moyens de détermination. Préférentiellement, les vitesses du chariot V X et V Y sont obtenues directement par les références de vitesse Vrx, respectivement Vry, fournies en entrée des variateurs Dx, respectivement Dy. Mais elles pourraient aussi être obtenues à partir d estimations ou de mesures de la vitesse réelle de direction du chariot selon l axe X et de la vitesse réelle de translation du chariot selon l axe Y. [0033] En plus de Θx et Θ x, le module estimateur 21 calcule également un second angle de ballant Θy selon l axe Y et une vitesse Θ y de cet angle Θy. Les valeurs du second angle de ballant Θy et de la vitesse Θ y sont transmises au module correcteur 22 qui calcule et délivre en sortie un signal de correction ΔVy qui est additionné à la consigne de vitesse Vcy du mouvement de translation. [0034] Le procédé de régulation utilise donc deux modèles de pendule avec amortissement similaires et indépendants pour les axes X et Y :

6 dans lequel : L représente la longueur des câbles, Vz représente la vitesse du mouvement de levage calculée comme étant la dérivée de la longueur L, - Θx représente le premier angle de ballant selon l axe de direction X, Θ x représente la vitesse de l angle de ballant Θx, Θ"x représente l accélération de l angle de ballant Θx, - Θy représente le second angle de ballant selon l axe de translation Y, Θ y représente la vitesse de l angle de ballant Θy, Θ"y représente l accélération de l angle de ballant Θy, - V x représente l accélération du mouvement de direction selon l axe X calculée comme étant la dérivée de la vitesse de déplacement déterminée Vx selon l axe X, - V y représente l accélération du mouvement de translation selon l axe Y calculée comme étant la dérivée de la vitesse de déplacement déterminée V Y selon l axe Y, - K fx et K fy représentent des coefficients de frottements fixes mais qui peuvent être différents l un de l autre, - g représente la pesanteur. [003] On suppose qu au démarrage du mouvement de direction, respectivement du mouvement de translation, les valeurs Θx, Θ x, Θ"x, respectivement Θy, Θ y, Θ"y, sont nulles. Comme indiqué précédemment dans le cas du mouvement Θx seul, les équations ci-dessus font intervenir la dérivée première et la dérivée seconde de l angle de ballant, utilisant donc un processus qui est itératif dans le temps, c est-à-dire que les résultats sont recalculés de façon périodique à chaque instant t, en utilisant notamment les résultats obtenus à l instant précédent t-1. [0036] Ainsi, l invention permet au module estimateur 21 de connaître en temps réel des valeurs estimées de l angle de ballant et de la vitesse de cet angle selon l un et/ou l autre des axes X et Y. Ces estimations sont transmises au module correcteur 22 qui leur applique un coefficient de correction K Θ, respectivement K Θ, pour fournir les signaux de correction ΔVx et/ou ΔVy, selon les équations suivantes : dans lequel : K Θx et K Θy sont les coefficients correcteurs appliqués respectivement aux angles de ballant Θx et Θy pour les axes X et Y, K Θx et K Θy sont les coefficients correcteurs appliqués respectivement aux vitesses des angles de ballant Θ x et Θ y pour les axes X et Y, ΔVx et ΔVy sont les signaux de correction à appliquer respectivement aux consignes de vitesse Vcx et Vcy selon l axe X et Y. [0037] La référence de vitesse Vrx appliquée en entrée du variateur Dx pilotant le moteur de direction Mx est donc égale à : Vrx = Vcx + ΔVx. De même, la référence de vitesse Vry appliquée en entrée du variateur Dy pilotant le moteur de translation My est égale à : Vry = Vcy + ΔVy. [0038] Selon un premier mode simplifié, les valeurs des coefficients de correction K Θ, K Θ sont fixes. Selon un second mode de réalisation préféré, les valeurs des coefficients de correction K Θ, K Θ peuvent être modifiables en fonction de la longueur L des câbles déterminée par le dispositif, de façon à optimiser les corrections de vitesse à apporter suivant la hauteur du pendule formé par la charge 1. Le module correcteur 22 est donc capable de mémoriser plusieurs valeurs de K Θ, K Θ suivant la longueur L. [0039] Vu sa simplicité, le dispositif de régulation décrit peut facilement être intégré dans un automate programmable chargé de piloter et surveiller les mouvements d un engin de levage. Il peut aussi être implanté directement dans chaque variateur de vitesse Dx et Dy pilotant les mouvements du chariot selon l axe X et Y. [00] Le dispositif décrit permet de mettre en oeuvre un procédé de régulation du déplacement de la charge 1 selon un ou plusieurs axes horizontaux X, Y. Le procédé de régulation comporte une étape de calcul, effectuée par le module estimateur 21, permettant de déterminer un angle de ballant Θx, Θy selon les axes X, Y et une vitesse Θ x, Θ y de cet angle de ballant. L étape de calcul utilise directement un modèle de pendule avec amortissement et nécessite uniquement de connaître comme seules variables d entrée la longueur L des câbles de suspension 14 de la charge 1 et la vitesse V X, Vy de déplacement du chariot selon les axes X, Y. [0041] Avantageusement, le procédé ne comporte donc aucune étape préalable de modélisation, qui nécessiterait de connaître d autres paramètres variables tels qu une mesure de l angle de ballant ou une mesure du courant circulant dans le moteur, dans le but de déterminer ou d affiner un modèle mathématique particulier ou dans le but d établir une fonction de transfert entre la vitesse du chariot et l angle de ballant mesuré par un capteur pour une longueur de câbles donnée. [0042] Le procédé de régulation comporte ensuite une étape de correction, effectuée par le module correcteur 22 du dispositif de régulation. L étape de correction utilise la valeur calculée de l angle de ballant Θx et de la vitesse Θ x de l angle de ballant, pour fournir un signal de correction de vitesse ΔVx qui sera introduit en complément d une éventuelle 6

7 consigne de vitesse Vcx en tant que référence de vitesse Vrx fournie en entrée du variateur de vitesse Dx pilotant le moteur de direction X du chariot Mx. De même, l étape de correction utilise la valeur calculée de l angle de ballant Θy et de la vitesse Θ y de l angle de ballant, pour fournir un signal de correction de vitesse ΔVy qui sera introduit en complément d une éventuelle consigne de vitesse Vcy en tant que référence de vitesse Vry fournie en entrée du variateur de vitesse Dy pilotant le moteur de translation Y du chariot My. Revendications 1 1. Dispositif de régulation du déplacement d une charge (1) suspendue par câbles à un chariot () qui est mobile selon un premier axe horizontal (X) dans un engin de levage, le dispositif comprenant des moyens de détermination d une longueur (L) des câbles de suspension (14) de la charge (1) et des moyens de détermination d une information représentative d une vitesse de déplacement (V X ) du chariot () selon le premier axe (X), caractérisé en ce que le dispositif de régulation () calcule un premier angle de ballant (Θx) de la charge (1) et une vitesse (Θ x) dudit premier angle de ballant (Θx) en utilisant uniquement ladite longueur (L) et ladite information représentative de la vitesse de déplacement (V X ) selon le premier axe (X) comme seules variables d entrée, et en utilisant une accélération (Θ"x) dudit premier angle de ballant (Θx) comme variable interne. 2. Dispositif de régulation selon la revendication 1, caractérisé en ce que le dispositif de régulation () calcule le premier angle de ballant (Θx) à l aide d un processus itératif utilisant la vitesse (Θ x) dudit premier angle de ballant (Θx) et de l accélération (Θ"x) dudit premier angle de ballant (Θx) Dispositif de régulation selon la revendication 1, caractérisé en ce que l information représentative de la vitesse de déplacement (V X ) du chariot selon le premier axe (X) est déterminée en utilisant une référence de vitesse (Vrx) qui est fournie à un variateur de vitesse (Dx) pilotant le déplacement du chariot () selon le premier axe (X) Dispositif de régulation selon la revendication 1, caractérisé en ce que l information représentative de la vitesse de déplacement (V x ) du chariot selon le premier axe (X) est déterminée en utilisant une estimation de vitesse qui est élaborée par un variateur de vitesse (Dx) pilotant le déplacement du chariot () selon le premier axe (X).. Dispositif de régulation selon la revendication 1, caractérisé en ce que le dispositif de régulation délivre un signal de correction (ΔVx) qui est ajouté à une consigne de vitesse (Vcx) pour fournir une référence de vitesse (Vrx) de déplacement du chariot () selon le premier axe (X), le signal de correction (ΔVx) étant calculé en appliquant un coefficient de correction (K Θx, K Θx ) au premier angle de ballant calculé (Θx) et à la vitesse calculée (Θ x) du premier angle de ballant (Θx). 6. Dispositif de régulation selon la revendication 1, dans lequel le chariot () est également mobile selon un second axe horizontal (Y) perpendiculaire au premier axe (X), et comportant des moyens pour déterminer une information représentative d une vitesse de déplacement (V Y ) du chariot () selon le second axe (Y), caractérisé en ce que le dispositif de régulation () calcule un second angle de ballant (Θy) de la charge (1) et une vitesse (Θ y) dudit second angle de ballant (Θy) en utilisant uniquement ladite longueur (L) et ladite information représentative de la vitesse de déplacement (V Y ) selon le second axe (Y) comme seules variables d entrée, et en utilisant une accélération (Θ"y) dudit second angle de ballant (Θy) comme variable interne Dispositif de régulation selon la revendication 6, caractérisé en ce que le dispositif de régulation () calcule le second angle de ballant (Θy) à l aide d un processus itératif utilisant la vitesse (Θ y) dudit second angle de ballant (Θy) et de l accélération (Θ"y) dudit second angle de ballant (Θy) Dispositif de régulation selon la revendication 6, caractérisé en ce que l information représentative de la vitesse de déplacement (V Y ) du chariot selon le second axe (Y) est déterminée en utilisant une référence de vitesse (Vry) de déplacement du chariot selon le second axe (Y). 9. Dispositif de régulation selon la revendication 6, caractérisé en ce que l information représentative de la vitesse de déplacement (V Y ) du chariot selon le second axe (Y) est déterminée en utilisant une mesure de vitesse de déplacement du chariot () selon le second axe (Y).. Dispositif de régulation selon la revendication 6, caractérisé en ce que dispositif de régulation délivre un signal de correction (ΔVy) qui est ajouté à une consigne de vitesse (Vcy) pour fournir une référence de vitesse (Vry) de 7

8 déplacement du chariot () selon le second axe (Y), le signal de correction (ΔVy) étant calculé en appliquant un coefficient de correction (K Θy, K Θy ) au second angle de ballant calculé (Θy) et à la vitesse calculée (Θ y) du second angle de ballant (Θy). 11. Dispositif de régulation selon la revendication ou, caractérisé en ce que les coefficients de correction (K Θx, K Θx, K Θy, K Θy ) sont variables en fonction de la longueur (L) des câbles de suspension (14) de la charge (1) Procédé de régulation du déplacement d une charge (1) suspendue par câbles à un chariot () qui est mobile selon au moins un axe horizontal (X, Y) dans un engin de levage, le procédé étant mis en oeuvre au moyen d un dispositif de régulation () selon l une des revendications précédentes, caractérisé en ce que le procédé de régulation comporte une étape de calcul permettant de déterminer un angle de ballant (Θx, Θy) de la charge (1) et une vitesse (Θ x, Θ y) de l angle de ballant en utilisant uniquement comme seules variables d entrée une longueur (L) des câbles de suspension (14) de la charge (1) et une information représentative d une vitesse (V X, Vy) de déplacement du chariot, et en utilisant une accélération (Θ"x, Θ"y) dudit angle de ballant (Θx, Θy) comme variable interne. 13. Procédé de régulation selon la revendication 12, caractérisé en ce que le procédé de régulation calcule l angle de ballant (Θx, Θy) à l aide d un processus itératif utilisant la vitesse (Θ x, Θ y) dudit angle de ballant (Θx, Θy) et de l accélération (Θ"x, Θ"y) dudit angle de ballant (Θx, Θy). 14. Procédé de régulation selon la revendication 12, caractérisé en ce que la vitesse (V X, V y ) de déplacement du chariot est déterminée à partir d une référence de vitesse (Vrx, Vry) de déplacement du chariot Procédé de régulation selon la revendication 12, caractérisé en ce que le procédé de régulation comporte une étape de correction permettant de fournir un signal de correction de vitesse (ΔVx, ΔVy) à partir des valeurs déterminées de l angle de ballant (Θx, Θy) et de la vitesse (Θ x, Θ y) de l angle de ballant, le signal de correction (ΔVx, ΔVy) étant calculé en appliquant un coefficient de correction (K Θx, K Θx, K Θy, K Θy ) à l angle de ballant calculé (Θx, Θy) et à la vitesse calculée (Θ x, Θ y) de l angle de ballant. 16. Procédé de régulation selon la revendication 1, caractérisé en ce que les coefficients de correction (K Θx, K Θx, K Θy, K Θy ) sont variables en fonction de la longueur (L) des câbles de suspension (14) de la charge (1) Procédé de régulation selon la revendication 12, caractérisé en ce que l étape de calcul utilise un modèle mathématique de pendule avec amortissement. Claims 4 1. Device for regulating the displacement of a load (1) suspended by cables from a trolley () which can move along to a first horizontal axis (X) in a hoisting appliance, the device comprising means for determining a length (L) of the cables (14) suspending the load (1) and means for determining information representative of a speed of displacement (V X ) of the trolley () along the first axis (X), characterized in that the regulation device () calculates a first sway angle (Θx) of the load (1) and a speed (Θ x) of said first sway angle (Θx) by using only said length (L) and said information representative of the speed of displacement (V X ) along the first axis (X) as the only input variables, and by using an acceleration (Θ"x) of said first sway angle (Θx) as internal variable Regulation device according to Claim 1, characterized in that the regulation device () calculates the first sway angle (Θx) by an iterative process using the speed (Θ x) of said first sway angle (Θx) and the acceleration (Θ"x) of said first sway angle (Θx). 3. Regulation device according to Claim 1, characterized in that the information representative of the speed of displacement (V X ) of the trolley along the first axis (X) is determined by using a speed reference (Vrx) which is supplied to a variable speed drive (Dx) driving the displacement of the trolley () along the first axis (X). 4. Regulation device according to Claim 1, characterized in that the information representative of the speed of displacement (V X ) of the trolley along the first axis (X) is determined by using a speed estimation which is generated by a variable speed drive (Dx) driving the displacement of the trolley () along the first axis (X). 8
 de la charge (1). 1 12.")
9 . Regulation device according to Claim 1, characterized in that the regulation device delivers a correction signal (ΔVx) which is added to a speed setpoint (Vcx) to supply a displacement speed reference (Vrx) of the trolley () along the first axis (X), the correction signal (ΔVx) being calculated by applying a correction coefficient (K Θx, K Θx ) to the calculated first sway angle (Θx) and to the calculated speed (Θ x) of the first sway angle (Θx). 6. Regulation device according to Claim 1, in which the trolley () can also move along a second horizontal axis (Y) perpendicular to the first axis (X), and comprising means for determining information representative of a speed of displacement (V Y ) of the trolley () along the second axis (Y), characterized in that the regulation device () calculates a second sway angle (Θy) of the load (1) and a speed (Θ y) of said second sway angle (Θy) by using only said length (L) and said information representative of the speed of displacement (V Y ) along the second axis (Y) as the only input variables, and by using an acceleration (Θ"y) of said second sway angle (Θy) as internal variable Regulation device according to Claim 6, characterized in that the regulation device () calculates the second sway angle (Θy) by an iterative process using the speed (Θ y) of said second sway angle (Θy) and the acceleration (Θ"y) of said second sway angle (Θy) Regulation device according to Claim 6, characterized in that the information representative of the speed of displacement (V Y ) of the trolley along the second axis (Y) is determined by using a displacement speed reference (Vry) of the trolley along the second axis (Y). 9. Regulation device according to Claim 6, characterized in that the information representative of the speed of displacement (V Y ) of the trolley along the second axis (Y) is determined by using a measurement of the speed of displacement of the trolley () along the second axis (Y).. Regulation device according to Claim 6, characterized in that the regulation device delivers a correction signal (ΔVy) which is added to a speed setpoint (Vcy) to supply a displacement speed reference (Vry) of the trolley () along the second axis (Y), the correction signal (ΔVy) being calculated by applying a correction coefficient (K Θy, K Θy ) to the calculated second sway angle (Θy) and to the calculated speed (Θ y) of the second sway angle (Θy). 11. Regulation device according to Claim or, characterized in that the correction coefficients (K Θx, K Θx, K Θy, K Θy ) are variable depending on the length (L) of the cables (14) suspending the load (1) Method of regulating the displacement of a load (1) suspended by cables from a trolley () which can move along at least one horizontal axis (X, Y) in a hoisting appliance, the method being implemented by means of a regulation device () according to one of the preceding claims, characterized in that the regulation method comprises a calculation step for determining a sway angle (Θx, Θy) of the load (1) and a speed (Θ x, Θ y) of the sway angle by using as the only input variables a length (L) of the cables (14) suspending the load (1) and information representative of a speed (V X, Vy) of displacement of the trolley, and by using an acceleration (Θ"x, Θ"y) of said sway angle (Θx, Θy) as input variable. 13. Regulation method according to Claim 12, characterized in that the regulation method calculates the sway angle (Θx, Θy) by an iterative process using the speed (Θ x, Θ y) of said sway angle (Θx, Θy) and the acceleration (Θ"x, Θ"y) of said sway angle (Θx, Θy). 14. Regulation method according to Claim 12, characterized in that the speed (V X, Vy) of displacement of the trolley is determined from a displacement speed reference (Vrx, Vry) of the trolley Regulation method according to Claim 12, characterized in that the regulation method comprises a correction step for supplying a speed correction signal (ΔVx, ΔVy) based on the determined values of the sway angle (Θx, Θy) and of the speed (Θ x, Θ y) of the sway angle, the correction signal (ΔVx, ΔVy) being calculated by applying a correction coefficient (K Θx, K Θx, K Θy, K Θy ) to the calculated sway angle (Θx, Θy) and to the calculated speed (Θ x, Θ y) of the sway angle. 16. Regulation method according to Claim 1, characterized in that the correction coefficients (K Θx, K Θx, K Θy, K Θy ) are variable according to the length (L) of the cables (14) suspending the load (1). 17. Regulation method according to Claim 12, characterized in that the calculation step uses a damped pendulum mathematical model. 9
 can also move along a second horizontal axis (Y) perpendicular to the first axis (X), and comprising means for determining information")
10 Patentansprüche 1. Vorrichtung zur Einstellung der Verschiebung einer Last (1), die über Kabel an einer Laufkatze () hängt, welche gemäß einer ersten waagrechten Achse (X) in einem Hebegerät beweglich ist, wobei die Vorrichtung Einrichtungen zur Bestimmung einer Länge (L) der Aufhängekabel (14) der Last (1) und Einrichtungen zur Bestimmung einer Information enthält, die für eine Verschiebegeschwindigkeit (V x ) der Laufkatze () entlang der ersten Achse (X) repräsentativ ist, dadurch gekennzeichnet, dass die Einstellvorrichtung () einen ersten Baumelwinkel (Θx) der Last (1) und eine Geschwindigkeit (Θ x) des ersten Baumelwinkels (Θx) berechnet, indem sie nur die Länge (L) und die für die Verschiebegeschwindigkeit (V x ) entlang der ersten Achse (X) repräsentative Information als einzige Eingangsvariablen verwendet, und indem sie eine Beschleunigung (Θ"x) des ersten Baumelwinkels (Θx) als interne Variable verwendet Einstellvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die Einstellvorrichtung () den ersten Baumelwinkel (Θx) mit Hilfe eines iterativen Prozesses berechnet, der die Geschwindigkeit (Θ x) des ersten Baumelwinkels (Θx) und die Beschleunigung (Θ"x) des ersten Baumelwinkels (Θx) verwendet. 3. Einstellvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die für die Verschiebegeschwindigkeit (V x ) der Laufkatze entlang der ersten Achse (X) repräsentative Information unter Verwendung eines Geschwindigkeitsrichtwerts (Vrx) bestimmt wird, der an einen Geschwindigkeitsregler (Dx) geliefert wird, welcher die Verschiebung der Laufkatze () entlang der ersten Achse (X) steuert Einstellvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die für die Verschiebegeschwindigkeit (V x ) der Laufkatze entlang der ersten Achse (X) repräsentative Information unter Verwendung einer Geschwindigkeitsschätzung bestimmt wird, die von einem Geschwindigkeitsregler (Dx) erarbeitet wird, der die Verschiebung der Laufkatze () entlang der ersten Achse (X) steuert.. Einstellvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die Einstellvorrichtung ein Korrektursignal (ΔVx) liefert, das zu einem Geschwindigkeitssollwert (Vcx) hinzugefügt wird, um einen Geschwindigkeitsrichtwert (Vrx) der Verschiebung der Laufkatze () entlang der ersten Achse (X) zu liefern, wobei das Korrektursignal (ΔVx) unter Anwendung eines Korrekturkoeffizienten (K Θx, K Θx ) an den ersten berechneten Baumelwinkel (Θx) und an die berechnete Geschwindigkeit (Θ x) des ersten Baumelwinkels (Θx) berechnet wird Einstellvorrichtung nach Anspruch 1, bei der die Laufkatze () ebenfalls entlang einer zweiten waagrechten Achse (Y) lotrecht zur ersten Achse (X) beweglich ist und Einrichtungen aufweist, um eine für eine Verschiebegeschwindigkeit (V y ) der Laufkatze () entlang der zweiten Achse (Y) repräsentative Information zu bestimmen, dadurch gekennzeichnet, dass die Einstellvorrichtung () einen zweiten Baumelwinkel (Θy) der Last (1) und eine Geschwindigkeit (Θ y) des zweiten Baumelwinkels (Θy) unter Verwendung nur der Länge (L) und der für die Verschiebegeschwindigkeit (V y ) entlang der zweiten Achse (Y) repräsentativen Information als einzige Eingangsvariablen und unter Verwendung einer Beschleunigung (Θ"y) des zweiten Baumelwinkels (Θy) als interne Variable berechnet. 7. Einstellvorrichtung nach Anspruch 6, dadurch gekennzeichnet, dass die Einstellvorrichtung () den zweiten Baumelwinkel (Θy) mit Hilfe eines iterativen Prozesses unter Verwendung der Geschwindigkeit (Θ y) des zweiten Baumelwinkels (Θy) und der Beschleunigung (Θ"y) des zweiten Baumelwinkels (Θy) berechnet. 8. Einstellvorrichtung nach Anspruch 6, dadurch gekennzeichnet, dass die für die Verschiebegeschwindigkeit (V y ) der Laufkatze entlang der zweiten Achse (Y) repräsentative Information unter Verwendung eines Geschwindigkeitsrichtwerts (Vry) der Verschiebung der Laufkatze entlang der zweiten Achse (Y) bestimmt wird Einstellvorrichtung nach Anspruch 6, dadurch gekennzeichnet, dass die für die Verschiebegeschwindigkeit (V y ) der Laufkatze entlang der zweiten Achse (Y) repräsentative Information unter Verwendung eines Geschwindigkeitsmesswerts der Verschiebung der Laufkatze () entlang der zweiten Achse (Y) bestimmt wird.. Einstellvorrichtung nach Anspruch 6, dadurch gekennzeichnet, dass die Einstellvorrichtung ein Korrektursignal (ΔVy) liefert, das zu einem Geschwindigkeitssollwert (Vcy) hinzugefügt wird, um einen Geschwindigkeitsrichtwert (Vry) der Verschiebung der Laufkatze () entlang der zweiten Achse (Y) zu liefern, wobei das Korrektursignal (ΔVy) unter Anwendung eines Korrekturkoeffizienten (K Θy, K Θy ) an den zweiten berechneten Baumelwinkel (Θy) und an die berechnete Geschwindigkeit (Θ y) des zweiten Baumelwinkels (Θy) berechnet wird.
 entlang der ersten Achse (X) repräsentativ ist, dadurch gekennzeichnet, dass die Einstellvorrichtung () einen ersten Baumelwinkel (Θx) der Last (1) und eine Geschwindigkeit (Θ x) des")
11 11. Einstellvorrichtung nach Anspruch oder, dadurch gekennzeichnet, dass die Korrekturkoeffizienten (K Θx, K Θx, K Θy, K Θy ) abhängig von der Länge (L) der Aufhängekabel (14) der Last (1) variabel sind. 12. Verfahren zur Einstellung der Verschiebung einer Last (1), die über Kabel an einer Laufkatze () hängt, welche gemäß mindestens einer waagrechten Achse (X, Y) in einem Hebegerät beweglich ist, wobei das Verfahren mittels einer Einstellvorrichtung () nach einem der vorhergehenden Ansprüche durchgeführt wird, dadurch gekennzeichnet, dass das Einstellverfahren einen Rechenschritt enthält, der es ermöglicht, einen Baumelwinkel (Θx, Θy) der Last (1) und eine Geschwindigkeit (Θ x, Θ y) des Baumelwinkels unter Verwendung als einzigen Eingangsvariablen nur einer Länge (L) der Aufhängekabel (14) der Last (1) und einer für eine Verschiebegeschwindigkeit (V x, V y ) der Laufkatze repräsentativen Information, und unter Verwendung einer Beschleunigung (Θ"x, Θ"y) des Baumelwinkels (Θx, Θy) als innere Variable zu bestimmen Einstellverfahren nach Anspruch 12, dadurch gekennzeichnet, dass das Einstellverfahren den Baumelwinkel (Θx, Θy) mit Hilfe eines iterativen Prozesses berechnet, der die Geschwindigkeit (Θ x, Θ y) des Baumelwinkels (Θx, Θy) und die Beschleunigung (Θ"x, Θ"y) des Baumelwinkels (Θx, Θy) verwendet Einstellverfahren nach Anspruch 12, dadurch gekennzeichnet, dass die Verschiebegeschwindigkeit (V x, V y ) der Laufkatze ausgehend von einem Geschwindigkeitsrichtwert (Vrx, Vry) der Verschiebung der Laufkatze bestimmt wird. 1. Einstellverfahren nach Anspruch 12, dadurch gekennzeichnet, dass das Einstellverfahren einen Korrekturschritt aufweist, der es ermöglicht, ein Geschwindigkeitskorrektursignal (ΔVx, ΔVy) ausgehend von den bestimmten Werten des Baumelwinkels (Θx, Θy) und der Geschwindigkeit (Θ x, Θ y) des Baumelwinkels zu liefern, wobei das Korrektursignal (ΔVx, ΔVy) unter Anwendung eines Korrekturkoeffizienten (K Θx, K Θx, K Θy, K Θy ) an den berechneten Baumelwinkel (Θx, Θy) und an die berechnete Geschwindigkeit (Θ x, Θ y) des Baumelwinkels berechnet wird. 16. Einstellverfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Korrekturkoeffizienten (K Θx, K Θx, K Θy, K Θy ) abhängig von der Länge (L) der Aufhängekabel (14) der Last (1) variabel sind. 17. Einstellverfahren nach Anspruch 12, dadurch gekennzeichnet, dass der Rechenschritt ein mathematisches Modell eines Pendels mit Dämpfung verwendet
 nach einem der vorhergehenden Ansprüche durchgeführt wird, dadurch gekennzeichnet, dass das Einstellverfahren einen Rechenschritt enthält, der es")
12 12
13 RÉFÉRENCES CITÉES DANS LA DESCRIPTION EP B1 Cette liste de références citées par le demandeur vise uniquement à aider le lecteur et ne fait pas partie du document de brevet européen. Même si le plus grand soin a été accordé à sa conception, des erreurs ou des omissions ne peuvent être exclues et l OEB décline toute responsabilité à cet égard. Documents brevets cités dans la description FR [0004] FR [000] US A [0006] US 2194 A [0007] 13

EP 2 063 325 A2 (19) (11) EP 2 063 325 A2 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.05.2009 Bulletin 2009/22
 (11) EP 2 063 325 A2 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.05.2009 Bulletin 2009/22") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 063 325 A2 (43) Date de publication: 27.05.2009 Bulletin 2009/22 (51) Int Cl.: G04B 17/06 (2006.01) G04B 17/34 (2006.01) (21) Numéro de dépôt: 08167317.0
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 063 325 A2 (43) Date de publication: 27.05.2009 Bulletin 2009/22 (51) Int Cl.: G04B 17/06 (2006.01) G04B 17/34 (2006.01) (21) Numéro de dépôt: 08167317.0
TEPZZ 568448A_T EP 2 568 448 A1 (19) (11) EP 2 568 448 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.
 (11) EP 2 568 448 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.") (19) TEPZZ 68448A_T (11) EP 2 68 448 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 13.03.2013 Bulletin 2013/11 (1) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.01) (21) Numéro de dépôt:
(19) TEPZZ 68448A_T (11) EP 2 68 448 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 13.03.2013 Bulletin 2013/11 (1) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.01) (21) Numéro de dépôt:
TEPZZ 6Z85Z5A T EP 2 608 505 A2 (19) (11) EP 2 608 505 A2 (12) DEMANDE DE BREVET EUROPEEN
 (11) EP 2 608 505 A2 (12) DEMANDE DE BREVET EUROPEEN") (19) TEPZZ 6Z8ZA T (11) EP 2 608 0 A2 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 26.06.13 Bulletin 13/26 (21) Numéro de dépôt: 12197432.3 (1) Int Cl.: H04M 3/487 (06.01) H04M 7/00 (06.01)
(19) TEPZZ 6Z8ZA T (11) EP 2 608 0 A2 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 26.06.13 Bulletin 13/26 (21) Numéro de dépôt: 12197432.3 (1) Int Cl.: H04M 3/487 (06.01) H04M 7/00 (06.01)
TEPZZ_9 94 5B_T EP 1 929 425 B1 (19) (11) EP 1 929 425 B1 (12) FASCICULE DE BREVET EUROPEEN
 (11) EP 1 929 425 B1 (12) FASCICULE DE BREVET EUROPEEN") (19) TEPZZ_9 94 B_T (11) EP 1 929 42 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 0.11.14 Bulletin 14/4 (21) Numéro de dépôt: 0679781.1 (22) Date
(19) TEPZZ_9 94 B_T (11) EP 1 929 42 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 0.11.14 Bulletin 14/4 (21) Numéro de dépôt: 0679781.1 (22) Date
(51) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L 1/053 (2006.01)
 Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L 1/053 (2006.01)") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 1 886 760 A1 (43) Date de publication: 13.02.2008 Bulletin 2008/07 (21) Numéro de dépôt: 0711197.6 (1) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 1 886 760 A1 (43) Date de publication: 13.02.2008 Bulletin 2008/07 (21) Numéro de dépôt: 0711197.6 (1) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L
(51) Int Cl.: B60H 1/34 (2006.01)
 Int Cl.: B60H 1/34 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 30 648 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 22.11.2006
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 30 648 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 22.11.2006
(51) Int Cl.: G06K 19/07 (2006.01) G06K 19/073 (2006.01)
 Int Cl.: G06K 19/07 (2006.01) G06K 19/073 (2006.01)") (19) TEPZZ 4Z_7Z6B_T (11) EP 2 401 706 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 22.04.201 Bulletin 201/17 (21) Numéro de dépôt: 711430.8 (22)
(19) TEPZZ 4Z_7Z6B_T (11) EP 2 401 706 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 22.04.201 Bulletin 201/17 (21) Numéro de dépôt: 711430.8 (22)
(51) Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)
 Int Cl.: H04L 29/06 (2006.01) G06F 21/55 (2013.01)") (19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
(19) TEPZZ 8 8 4_A_T (11) EP 2 838 241 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 18.02.1 Bulletin 1/08 (1) Int Cl.: H04L 29/06 (06.01) G06F 21/ (13.01) (21) Numéro de dépôt: 141781.4
(51) Int Cl. 7 : E03D 1/012, E03D 11/14
 Int Cl. 7 : E03D 1/012, E03D 11/14") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00086770B1* (11) EP 0 867 70 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00086770B1* (11) EP 0 867 70 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du
EP 2 071 505 A1 (19) (11) EP 2 071 505 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 17.06.2009 Bulletin 2009/25
 (11) EP 2 071 505 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 17.06.2009 Bulletin 2009/25") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 071 0 A1 (43) Date de publication: 17.06.09 Bulletin 09/2 (1) Int Cl.: G06Q /00 (06.01) (21) Numéro de dépôt: 0817092.3 (22) Date de dépôt: 03.12.08 (84)
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 071 0 A1 (43) Date de publication: 17.06.09 Bulletin 09/2 (1) Int Cl.: G06Q /00 (06.01) (21) Numéro de dépôt: 0817092.3 (22) Date de dépôt: 03.12.08 (84)
EP 2 533 063 A1 (19) (11) EP 2 533 063 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 12.12.2012 Bulletin 2012/50
 (11) EP 2 533 063 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 12.12.2012 Bulletin 2012/50") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 33 063 A1 (43) Date de publication: 12.12.12 Bulletin 12/0 (1) Int Cl.: G01R 31/318 (06.01) (21) Numéro de dépôt: 1216093.1 (22) Date de dépôt: 23.04.12 (84)
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 33 063 A1 (43) Date de publication: 12.12.12 Bulletin 12/0 (1) Int Cl.: G01R 31/318 (06.01) (21) Numéro de dépôt: 1216093.1 (22) Date de dépôt: 23.04.12 (84)
TEPZZ 5 5 _9A_T EP 2 535 219 A1 (19) (11) EP 2 535 219 A1 (12) DEMANDE DE BREVET EUROPEEN
 (11) EP 2 535 219 A1 (12) DEMANDE DE BREVET EUROPEEN") (19) TEPZZ 5 5 _9A_T (11) EP 2 535 219 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 19.12.2012 Bulletin 2012/51 (21) Numéro de dépôt: 12171697.1 (51) Int Cl.: B60L 5/20 (2006.01) B60L 5/42
(19) TEPZZ 5 5 _9A_T (11) EP 2 535 219 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 19.12.2012 Bulletin 2012/51 (21) Numéro de dépôt: 12171697.1 (51) Int Cl.: B60L 5/20 (2006.01) B60L 5/42
EP 2 339 758 A1 (19) (11) EP 2 339 758 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 29.06.2011 Bulletin 2011/26
 (11) EP 2 339 758 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 29.06.2011 Bulletin 2011/26") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 339 758 A1 (43) Date de publication: 29.06.2011 Bulletin 2011/26 (21) Numéro de dépôt: 09179459.4 (51) Int Cl.: H04B 1/69 (2011.01) H03K 5/08 (2006.01) H03K
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 339 758 A1 (43) Date de publication: 29.06.2011 Bulletin 2011/26 (21) Numéro de dépôt: 09179459.4 (51) Int Cl.: H04B 1/69 (2011.01) H03K 5/08 (2006.01) H03K
TEPZZ 65 Z4A_T EP 2 653 204 A1 (19) (11) EP 2 653 204 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: B01D 3/00 (2006.01)
 (11) EP 2 653 204 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: B01D 3/00 (2006.01)") (19) TEPZZ 65 Z4A_T (11) EP 2 653 204 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 23.10.2013 Bulletin 2013/43 (51) Int Cl.: B01D 3/00 (2006.01) (21) Numéro de dépôt: 13305457.7 (22) Date
(19) TEPZZ 65 Z4A_T (11) EP 2 653 204 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 23.10.2013 Bulletin 2013/43 (51) Int Cl.: B01D 3/00 (2006.01) (21) Numéro de dépôt: 13305457.7 (22) Date
TEPZZ_98 747B_T EP 1 983 747 B1 (19) (11) EP 1 983 747 B1 (12) FASCICULE DE BREVET EUROPEEN. (51) Int Cl.:
 (11) EP 1 983 747 B1 (12) FASCICULE DE BREVET EUROPEEN. (51) Int Cl.:") (19) TEPZZ_98 747B_T (11) EP 1 983 747 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 14.08.13 Bulletin 13/33 (1) Int Cl.: H04N /77 (06.01) H04N /76
(19) TEPZZ_98 747B_T (11) EP 1 983 747 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 14.08.13 Bulletin 13/33 (1) Int Cl.: H04N /77 (06.01) H04N /76
3) Demandeur: FIVES-CAIL BABCOCK, Société anonyme 7 rue Montallvet F-75383 Parts Cedex 08 (FR)
 Demandeur: FIVES-CAIL BABCOCK, Société anonyme 7 rue Montallvet F-75383 Parts Cedex 08 (FR)") raiemami ê #curupaiscnes European Patent Office Numéro de publication: 0 21 9 365 Office européen des brevets A1 DEMANDE DE BREVET EUROPEEN Numéro de dépôt: 86401852.8 Int. Cl.4: B 65 G 65/06 @ Date de
raiemami ê #curupaiscnes European Patent Office Numéro de publication: 0 21 9 365 Office européen des brevets A1 DEMANDE DE BREVET EUROPEEN Numéro de dépôt: 86401852.8 Int. Cl.4: B 65 G 65/06 @ Date de
(51) Int Cl.: F16C 7/06 (2006.01) F16C 7/04 (2006.01) F02K 1/12 (2006.01) F02K 1/70 (2006.01) F02K 1/72 (2006.01)
 Int Cl.: F16C 7/06 (2006.01) F16C 7/04 (2006.01) F02K 1/12 (2006.01) F02K 1/70 (2006.01) F02K 1/72 (2006.01)") (19) TEPZZ 4 686B_T (11) EP 2 411 686 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet:.12.2014 Bulletin 2014/0 (21) Numéro de dépôt: 73.8 (22) Date de
(19) TEPZZ 4 686B_T (11) EP 2 411 686 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet:.12.2014 Bulletin 2014/0 (21) Numéro de dépôt: 73.8 (22) Date de
EP 2 290 703 A1 (19) (11) EP 2 290 703 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 02.03.2011 Bulletin 2011/09
 (11) EP 2 290 703 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 02.03.2011 Bulletin 2011/09") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 290 703 A1 (43) Date de publication: 02.03.2011 Bulletin 2011/09 (1) Int Cl.: H01L 31/02 (2006.01) (21) Numéro de dépôt: 008786. (22) Date de dépôt: 24.08.20
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 290 703 A1 (43) Date de publication: 02.03.2011 Bulletin 2011/09 (1) Int Cl.: H01L 31/02 (2006.01) (21) Numéro de dépôt: 008786. (22) Date de dépôt: 24.08.20
TEPZZ 8758_8A_T EP 2 875 818 A1 (19) (11) EP 2 875 818 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: A61K 33/00 (2006.01) A61P 25/06 (2006.
 (11) EP 2 875 818 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: A61K 33/00 (2006.01) A61P 25/06 (2006.") (19) TEPZZ 878_8A_T (11) EP 2 87 818 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 27.0.1 Bulletin 1/22 (1) Int Cl.: A61K 33/00 (06.01) A61P 2/06 (06.01) (21) Numéro de dépôt: 14680.3 (22)
(19) TEPZZ 878_8A_T (11) EP 2 87 818 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 27.0.1 Bulletin 1/22 (1) Int Cl.: A61K 33/00 (06.01) A61P 2/06 (06.01) (21) Numéro de dépôt: 14680.3 (22)
(51) Int Cl. 7 : E03B 7/07, E03C 1/02
 Int Cl. 7 : E03B 7/07, E03C 1/02") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00129827B1* (11) EP 1 298 27 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00129827B1* (11) EP 1 298 27 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du
Europâisches Patentamt 19 à. European Patent Office Office européen des brevets (fi) Numéro de publication : 0 440 083 B1
 Numéro de publication : 0 440 083 B1") Europâisches Patentamt 19 à European Patent Office Office européen des brevets (fi) Numéro de publication : 0 440 083 B1 12 FASCICULE DE BREVET EUROPEEN (45) Date de publication du fascicule du brevet
Europâisches Patentamt 19 à European Patent Office Office européen des brevets (fi) Numéro de publication : 0 440 083 B1 12 FASCICULE DE BREVET EUROPEEN (45) Date de publication du fascicule du brevet
TEPZZ 8 46 5A_T EP 2 824 625 A1 (19) (11) EP 2 824 625 A1 (12) DEMANDE DE BREVET EUROPEEN
 (11) EP 2 824 625 A1 (12) DEMANDE DE BREVET EUROPEEN") (19) TEPZZ 8 46 A_T (11) EP 2 824 62 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 14.01.1 Bulletin 1/03 (21) Numéro de dépôt: 14176043.9 (1) Int Cl.: G06Q /02 (12.01) G06Q / (12.01) G06Q
(19) TEPZZ 8 46 A_T (11) EP 2 824 62 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 14.01.1 Bulletin 1/03 (21) Numéro de dépôt: 14176043.9 (1) Int Cl.: G06Q /02 (12.01) G06Q / (12.01) G06Q
(51) Int Cl.: H04L 29/08 (2006.01) H04L 12/24 (2006.01) H04L 12/26 (2006.01) H04L 29/06 (2006.01)
 Int Cl.: H04L 29/08 (2006.01) H04L 12/24 (2006.01) H04L 12/26 (2006.01) H04L 29/06 (2006.01)") (19) (11) EP 1 987 68 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 22.07.09 Bulletin 09/ (21) Numéro de dépôt: 077316.6 (22) Date de dépôt: 13.02.07
(19) (11) EP 1 987 68 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 22.07.09 Bulletin 09/ (21) Numéro de dépôt: 077316.6 (22) Date de dépôt: 13.02.07
(51) Int Cl.: A47B 5/00 (2006.01) A47B 31/00 (2006.01) E05C 17/28 (2006.01)
 Int Cl.: A47B 5/00 (2006.01) A47B 31/00 (2006.01) E05C 17/28 (2006.01)") (19) TEPZZ 664 5_B_T (11) EP 2 664 251 B1 (12) FASCICULE DE BREVET EUROPEEN (45) Date de publication et mention de la délivrance du brevet: 18.02.2015 Bulletin 2015/08 (51) Int Cl.: A47B 5/00 (2006.01)
(19) TEPZZ 664 5_B_T (11) EP 2 664 251 B1 (12) FASCICULE DE BREVET EUROPEEN (45) Date de publication et mention de la délivrance du brevet: 18.02.2015 Bulletin 2015/08 (51) Int Cl.: A47B 5/00 (2006.01)
Je suis sous procédure Dublin qu est-ce que cela signifie?
 FR Je suis sous procédure Dublin qu est-ce que cela signifie? B Informations pour les demandeurs d une protection internationale dans le cadre d une procédure de Dublin en vertu de l article 4 du Règlement
FR Je suis sous procédure Dublin qu est-ce que cela signifie? B Informations pour les demandeurs d une protection internationale dans le cadre d une procédure de Dublin en vertu de l article 4 du Règlement
EP 2 464 068 A1 (19) (11) EP 2 464 068 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: H04L 12/58 (2006.01)
 (11) EP 2 464 068 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: H04L 12/58 (2006.01)") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 464 068 A1 (43) Date de publication: 13.06.12 Bulletin 12/24 (1) Int Cl.: H04L 12/8 (06.01) (21) Numéro de dépôt: 11192660.6 (22) Date de dépôt: 08.12.11
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 464 068 A1 (43) Date de publication: 13.06.12 Bulletin 12/24 (1) Int Cl.: H04L 12/8 (06.01) (21) Numéro de dépôt: 11192660.6 (22) Date de dépôt: 08.12.11
Informations techniques et questions
 Journée Erasmus Appel à propositions 2015 Informations techniques et questions Catherine Carron et Amanda Crameri Coordinatrices de projet Erasmus Contenu Call solution transitoire 2015 : remarques générales
Journée Erasmus Appel à propositions 2015 Informations techniques et questions Catherine Carron et Amanda Crameri Coordinatrices de projet Erasmus Contenu Call solution transitoire 2015 : remarques générales
EP 2 372 958 A1 (19) (11) EP 2 372 958 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 05.10.2011 Bulletin 2011/40
 (11) EP 2 372 958 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 05.10.2011 Bulletin 2011/40") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 372 98 A1 (43) Date de publication: 0..11 Bulletin 11/ (21) Numéro de dépôt: 11160.0 (1) Int Cl.: H04L 12/28 (06.01) H04L 29/06 (06.01) H04W 84/12 (09.01)
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 372 98 A1 (43) Date de publication: 0..11 Bulletin 11/ (21) Numéro de dépôt: 11160.0 (1) Int Cl.: H04L 12/28 (06.01) H04L 29/06 (06.01) H04W 84/12 (09.01)
Paiements transfrontaliers
 Paiements transfrontaliers Transférer rapidement et facilement des fonds à partir de et vers un compte à l étranger Valable à partir du 1 e janvier 2007 Valable à partir du 1 e janvier 2007 La vie actuelle
Paiements transfrontaliers Transférer rapidement et facilement des fonds à partir de et vers un compte à l étranger Valable à partir du 1 e janvier 2007 Valable à partir du 1 e janvier 2007 La vie actuelle
(51) Int Cl.: H04Q 7/38 (2006.01)
 Int Cl.: H04Q 7/38 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 327 373 B1 (4) Date of publication and mention of the grant of the patent: 13.09.06
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPEAN PATENT SPECIFICATION (11) EP 1 327 373 B1 (4) Date of publication and mention of the grant of the patent: 13.09.06
EP 2 326 026 A1 (19) (11) EP 2 326 026 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 25.05.2011 Bulletin 2011/21
 (11) EP 2 326 026 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 25.05.2011 Bulletin 2011/21") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 326 026 A1 (43) Date de publication: 25.05.2011 Bulletin 2011/21 (51) Int Cl.: H04B 3/54 (2006.01) H04B 3/56 (2006.01) (21) Numéro de dépôt: 09176548.7 (22)
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 326 026 A1 (43) Date de publication: 25.05.2011 Bulletin 2011/21 (51) Int Cl.: H04B 3/54 (2006.01) H04B 3/56 (2006.01) (21) Numéro de dépôt: 09176548.7 (22)
ANNEX 1 ANNEXE RÈGLEMENT DÉLÉGUÉ (UE) N /.. DE LA COMMISSION
 N /.. DE LA COMMISSION") COMMISSION EUROPÉENNE Bruxelles, le 26.11.2014 C(2014) 8734 final ANNEX 1 ANNEXE au RÈGLEMENT DÉLÉGUÉ (UE) N /.. DE LA COMMISSION remplaçant les annexes I et II du règlement (UE) n 1215/2012 du Parlement
COMMISSION EUROPÉENNE Bruxelles, le 26.11.2014 C(2014) 8734 final ANNEX 1 ANNEXE au RÈGLEMENT DÉLÉGUÉ (UE) N /.. DE LA COMMISSION remplaçant les annexes I et II du règlement (UE) n 1215/2012 du Parlement
Notes explicatives concernant le formulaire d opposition
 OFFICE DE L HARMONISATION DANS LE MARCHÉ INTÉRIEUR (OHMI) (marques, dessins et modèles) Notes explicatives concernant le formulaire d opposition 1. Remarques générales 1.1 Utilisation du formulaire Le
OFFICE DE L HARMONISATION DANS LE MARCHÉ INTÉRIEUR (OHMI) (marques, dessins et modèles) Notes explicatives concernant le formulaire d opposition 1. Remarques générales 1.1 Utilisation du formulaire Le
1. Raison de la modification
 T Service Documentation Technicocommerciale Information Technique Rubrique F Les régulations Nouvelle version de programme de la carte SU : F1.4 P5253 JS F 67580 Mertzwiller N ITOE0117 26/09/2011 FR 1.
T Service Documentation Technicocommerciale Information Technique Rubrique F Les régulations Nouvelle version de programme de la carte SU : F1.4 P5253 JS F 67580 Mertzwiller N ITOE0117 26/09/2011 FR 1.
". TY convertisseur statique, et des condensateurs de filtrage.
 curopaiscnes raiemamt European Patent Office Office européen des brevets Numéro de publication : 0 267 129 A1 (g) DEMANDE DE BREVET EUROPEEN (21) Numéro de dépôt: 87420286.4 @ Date de dépôt: 23.10.87 Int.
curopaiscnes raiemamt European Patent Office Office européen des brevets Numéro de publication : 0 267 129 A1 (g) DEMANDE DE BREVET EUROPEEN (21) Numéro de dépôt: 87420286.4 @ Date de dépôt: 23.10.87 Int.
Europâisches Patentamt. European Patent Office Office européen des brevets. @ Numéro de publication: 0086 441 B1 FASCICULE DE BREVET EUROPEEN
 Europâisches Patentamt European Patent Office Office européen des brevets @ Numéro de publication: 0086 441 B1 FASCICULE DE BREVET EUROPEEN ( ) Dafe de publication du fascicule du brevet: @ Int. Cl.4:
Europâisches Patentamt European Patent Office Office européen des brevets @ Numéro de publication: 0086 441 B1 FASCICULE DE BREVET EUROPEEN ( ) Dafe de publication du fascicule du brevet: @ Int. Cl.4:
B o u r s e d e m o b i l i t é B E E p o u r l e s d é p a r t s e n 2 0 1 2 1
 1 B o u r s e d e m o b i l i t é B E E p o u r l e s d é p a r t s e n 2 0 1 2 1 Objectif : Acquérir une expérience professionnelle en réalisant un stage en entreprise de 3 mois à temps plein à l étranger
1 B o u r s e d e m o b i l i t é B E E p o u r l e s d é p a r t s e n 2 0 1 2 1 Objectif : Acquérir une expérience professionnelle en réalisant un stage en entreprise de 3 mois à temps plein à l étranger
@ Numéro de publication: DE BREVET EUROPEEN
 Europâisches Patentamt European Patent Office Office européen des brevets @ Numéro de publication: 0 077 7 3 9 B1 FASCICULE DE BREVET EUROPEEN ( ) Date de publication du fascicule du brevet: 07.01.87 Int.
Europâisches Patentamt European Patent Office Office européen des brevets @ Numéro de publication: 0 077 7 3 9 B1 FASCICULE DE BREVET EUROPEEN ( ) Date de publication du fascicule du brevet: 07.01.87 Int.
*EP001039352A1* EP 1 039 352 A1 (19) (11) EP 1 039 352 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.09.2000 Bulletin 2000/39
 (11) EP 1 039 352 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 27.09.2000 Bulletin 2000/39") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001039352A1* (11) EP 1 039 352 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 27.09.2000 Bulletin 2000/39
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001039352A1* (11) EP 1 039 352 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 27.09.2000 Bulletin 2000/39
(51) Int Cl.: F27D 3/02 (2006.01)
 Int Cl.: F27D 3/02 (2006.01)") (19) (11) EP 1 880 17 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 16.07.08 Bulletin 08/29 (21) Numéro de dépôt: 06726144.6 (22) Date de dépôt: 24.03.06
(19) (11) EP 1 880 17 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 16.07.08 Bulletin 08/29 (21) Numéro de dépôt: 06726144.6 (22) Date de dépôt: 24.03.06
J ai demandé l asile dans l Union européenne quel pays sera responsable de l analyse de ma demande?
 FR J ai demandé l asile dans l Union européenne quel pays sera responsable de l analyse de ma demande? A Informations sur le règlement de Dublin pour les demandeurs d une protection internationale en vertu
FR J ai demandé l asile dans l Union européenne quel pays sera responsable de l analyse de ma demande? A Informations sur le règlement de Dublin pour les demandeurs d une protection internationale en vertu
Guide SEPA Paramétrage Experts Solutions SAGE depuis 24 ans
 Guide SEPA Paramétrage Axe Informatique Experts Solutions SAGE depuis 24 ans Installation Paramétrage Développement Formation Support Téléphonique Maintenance SEPA Vérification du paramétrage des applications
Guide SEPA Paramétrage Axe Informatique Experts Solutions SAGE depuis 24 ans Installation Paramétrage Développement Formation Support Téléphonique Maintenance SEPA Vérification du paramétrage des applications
EP 2 458 813 A1 (19) (11) EP 2 458 813 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: H04L 29/06 (2006.01) H04L 29/12 (2006.01)
 (11) EP 2 458 813 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: H04L 29/06 (2006.01) H04L 29/12 (2006.01)") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 48 813 A1 (43) Date de publication:.0.12 Bulletin 12/22 (1) Int Cl.: H04L 29/06 (06.01) H04L 29/12 (06.01) (21) Numéro de dépôt: 11188168.6 (22) Date de dépôt:
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 2 48 813 A1 (43) Date de publication:.0.12 Bulletin 12/22 (1) Int Cl.: H04L 29/06 (06.01) H04L 29/12 (06.01) (21) Numéro de dépôt: 11188168.6 (22) Date de dépôt:
*EP001343123A1* EP 1 343 123 A1 (19) (11) EP 1 343 123 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 10.09.2003 Bulletin 2003/37
 (11) EP 1 343 123 A1 (12) DEMANDE DE BREVET EUROPEEN. (43) Date de publication: 10.09.2003 Bulletin 2003/37") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001343123A1* (11) EP 1 343 123 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 10.09.2003 Bulletin 2003/37
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001343123A1* (11) EP 1 343 123 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 10.09.2003 Bulletin 2003/37
COMMENT PAYEZ-VOUS? COMMENT VOUDRIEZ-VOUS PAYER?
 COMMENT PAYEZ-VOUS? COMMENT VOUDRIEZ-VOUS PAYER? 2/09/2008-22/10/2008 329 réponses PARTICIPATION Pays DE - Allemagne 55 (16.7%) PL - Pologne 41 (12.5%) DK - Danemark 20 (6.1%) NL - Pays-Bas 18 (5.5%) BE
COMMENT PAYEZ-VOUS? COMMENT VOUDRIEZ-VOUS PAYER? 2/09/2008-22/10/2008 329 réponses PARTICIPATION Pays DE - Allemagne 55 (16.7%) PL - Pologne 41 (12.5%) DK - Danemark 20 (6.1%) NL - Pays-Bas 18 (5.5%) BE
(51) Int Cl.: H04W 8/24 (2009.01) G06F 9/445 (2006.01)
 Int Cl.: H04W 8/24 (2009.01) G06F 9/445 (2006.01)") (19) (12) FASCICULE DE BREVET EUROPEEN (11) EP 1 961 247 B1 (4) Date de publication et mention de la délivrance du brevet: 17.02. Bulletin /07 (21) Numéro de dépôt: 06778042.9 (22) Date de dépôt: 28.07.06
(19) (12) FASCICULE DE BREVET EUROPEEN (11) EP 1 961 247 B1 (4) Date de publication et mention de la délivrance du brevet: 17.02. Bulletin /07 (21) Numéro de dépôt: 06778042.9 (22) Date de dépôt: 28.07.06
Manuel d installation et de maintenance (serrures LR128 E)
") Manuel d installation et de maintenance (serrures LR128 E) Manuel comprenant : Installation de la gâche GV et GVR :............................................ page 2 Position et réglage du shunt - Cales
Manuel d installation et de maintenance (serrures LR128 E) Manuel comprenant : Installation de la gâche GV et GVR :............................................ page 2 Position et réglage du shunt - Cales
Innover à l'ère du numérique : ramener l'europe sur la bonne voie Présentation de J.M. Barroso,
 Innover à l'ère du numérique : ramener l'europe sur la bonne voie Présentation de J.M. Barroso, Président de la Commission européenne, au Conseil européen des 24 et 25 octobre 213 Indice de compétitivité
Innover à l'ère du numérique : ramener l'europe sur la bonne voie Présentation de J.M. Barroso, Président de la Commission européenne, au Conseil européen des 24 et 25 octobre 213 Indice de compétitivité
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Réserve Personnelle. Persönliche Reserve. Emprunter et épargner en fonction de vos besoins. Leihen und sparen je nach Bedarf
 crédit épargne Réserve Personnelle Emprunter et épargner en fonction de vos besoins Persönliche Reserve Leihen und sparen je nach Bedarf Réserve Personnelle Vous voulez disposer à tout moment des moyens
crédit épargne Réserve Personnelle Emprunter et épargner en fonction de vos besoins Persönliche Reserve Leihen und sparen je nach Bedarf Réserve Personnelle Vous voulez disposer à tout moment des moyens
Parcage. Bases légales. Office des ponts et chaussées du canton de Berne. Tiefbauamt des Kantons Bern. Bau-, Verkehrsund Energiedirektion
 Tiefbauamt des Kantons Bern Bau-, Verkehrsund Energiedirektion Office des ponts et chaussées du canton de Berne Direction des travaux publics, des transports et de l'énergie Tâches spéciales Technique
Tiefbauamt des Kantons Bern Bau-, Verkehrsund Energiedirektion Office des ponts et chaussées du canton de Berne Direction des travaux publics, des transports et de l'énergie Tâches spéciales Technique
(51) Int Cl.: B60R 25/00 (2013.01)
 Int Cl.: B60R 25/00 (2013.01)") (19) TEPZZ 4_ 86B_T (11) EP 2 412 86 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 01.0.13 Bulletin 13/18 (1) Int Cl.: B60R 2/00 (13.01) (21) Numéro
(19) TEPZZ 4_ 86B_T (11) EP 2 412 86 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 01.0.13 Bulletin 13/18 (1) Int Cl.: B60R 2/00 (13.01) (21) Numéro
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
*EP001178406B1* EP 1 178 406 B1 (19) (11) EP 1 178 406 B1 (12) EUROPEAN PATENT SPECIFICATION
 (11) EP 1 178 406 B1 (12) EUROPEAN PATENT SPECIFICATION") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0011786B1* (11) EP 1 178 6 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0011786B1* (11) EP 1 178 6 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
(sî) Int. Cl.5 : B60N 3/00. (72) Inventeur : Mercier, Jean-Louis Henri Robert
 Int. Cl.5 : B60N 3/00. (72) Inventeur : Mercier, Jean-Louis Henri Robert") Europâisches Patentamt 19 à European Patent Office Office européen des brevets (fi) Numéro de publication : 0 388 307 B1 12 FASCICULE DE BREVET EUROPEEN (45) Date de publication du fascicule du brevet
Europâisches Patentamt 19 à European Patent Office Office européen des brevets (fi) Numéro de publication : 0 388 307 B1 12 FASCICULE DE BREVET EUROPEEN (45) Date de publication du fascicule du brevet
ACTUATORLINE - TH Serie
 ACTUATORLINE - T Serie www.rollon.com WICTISTE MERKMALE - CARACTÉRISTIQUES PRINCIPALES Extrem kompakte Abmessungen Dimensions extrêmement compactes ohe Positioniergenauigkeit rande précision de positionnement
ACTUATORLINE - T Serie www.rollon.com WICTISTE MERKMALE - CARACTÉRISTIQUES PRINCIPALES Extrem kompakte Abmessungen Dimensions extrêmement compactes ohe Positioniergenauigkeit rande précision de positionnement
Jouve, 18, rue Saint-Denis, 75001 PARIS
 19 à Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 645 740 A1 12 DEMANDE DE BREVET EUROPEEN @ Numéro de dépôt : 94402079.1 @ Int. ci.6: G07B 17/04,
19 à Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 645 740 A1 12 DEMANDE DE BREVET EUROPEEN @ Numéro de dépôt : 94402079.1 @ Int. ci.6: G07B 17/04,
COMITÉ ADMINISTRATIF ET JURIDIQUE. Quarante-huitième session Genève, 20 et 21 octobre 2003
 ORIGINAL : anglais DATE : 18 juillet 2003 F UNION INTERNATIONALE POUR LA PROTECTION DES OBTENTIONS VÉGÉTALES GENÈVE COMITÉ ADMINISTRATIF ET JURIDIQUE Quarante-huitième session Genève, 20 et 21 octobre
ORIGINAL : anglais DATE : 18 juillet 2003 F UNION INTERNATIONALE POUR LA PROTECTION DES OBTENTIONS VÉGÉTALES GENÈVE COMITÉ ADMINISTRATIF ET JURIDIQUE Quarante-huitième session Genève, 20 et 21 octobre
Délégation Côte d Azur Formation Geslab 203 module dépenses 1
 Délégation Côte d Azur Formation Geslab 203 module dépenses 1 Déroulement de la journée Tiers Recherches et Couguar Créations et particularités Demandes d achats Principes et création Commandes Informations
Délégation Côte d Azur Formation Geslab 203 module dépenses 1 Déroulement de la journée Tiers Recherches et Couguar Créations et particularités Demandes d achats Principes et création Commandes Informations
Canada-Inde Profil et perspective
 Canada-Inde Profil et perspective Mars 2009 0 L Inde et le Canada : un bref profil Vancouver Calgary Montréal Toronto INDE 3 287 263 km² 1,12 milliard 1 181 milliards $US 1 051 $US Source : Fiche d information
Canada-Inde Profil et perspective Mars 2009 0 L Inde et le Canada : un bref profil Vancouver Calgary Montréal Toronto INDE 3 287 263 km² 1,12 milliard 1 181 milliards $US 1 051 $US Source : Fiche d information
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Rank Xerox (UK) Business Services
 Business Services") Europâisches Patentamt European Patent Office Dffice européen des brevets Numéro de publication: 0 451 672 A1 DEMANDE DE BREVET EUROPEEN Numéro de dépôt: 91105206.6 (g) Int. Cl.5: A47J 31/54 Date de dépôt:
Europâisches Patentamt European Patent Office Dffice européen des brevets Numéro de publication: 0 451 672 A1 DEMANDE DE BREVET EUROPEEN Numéro de dépôt: 91105206.6 (g) Int. Cl.5: A47J 31/54 Date de dépôt:
Jouve, 18, rue St-Denis, 75001 Paris, France
 Europàisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 171 3 6 4 B1 12 FASCICULE DE BREVET EUROPÉEN Date de publication du fascicule du brevet : 11.10.89 @
Europàisches Patentamt European Patent Office Office européen des brevets Numéro de publication : 0 171 3 6 4 B1 12 FASCICULE DE BREVET EUROPÉEN Date de publication du fascicule du brevet : 11.10.89 @
Comment devenir référent? Comment le rester?
 Comment devenir référent? Comment le rester? Patrick CHOUTET Service des Maladies infectieuses CHU Bretonneau Tours RICAI décembre 2005 Quels enjeux? autres que le pouvoir Total Outpatient antibiotic use
Comment devenir référent? Comment le rester? Patrick CHOUTET Service des Maladies infectieuses CHU Bretonneau Tours RICAI décembre 2005 Quels enjeux? autres que le pouvoir Total Outpatient antibiotic use
(51) Int Cl.: H04L 29/00 (2006.01)
 Int Cl.: H04L 29/00 (2006.01)") (19) (11) EP 1 299 980 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.06.09 Bulletin 09/23 (21) Application number: 01937929.6 (22) Date of filing:.06.01
(19) (11) EP 1 299 980 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.06.09 Bulletin 09/23 (21) Application number: 01937929.6 (22) Date of filing:.06.01
TEPZZ 699Z A_T EP 2 699 032 A1 (19) (11) EP 2 699 032 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: H04W 12/06 (2009.01) H04L 29/06 (2006.
 (11) EP 2 699 032 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: H04W 12/06 (2009.01) H04L 29/06 (2006.") (19) TEPZZ 699Z A_T (11) EP 2 699 032 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 19.02.14 Bulletin 14/08 (1) Int Cl.: H04W 12/06 (09.01) H04L 29/06 (06.01) (21) Numéro de dépôt: 1004.1
(19) TEPZZ 699Z A_T (11) EP 2 699 032 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 19.02.14 Bulletin 14/08 (1) Int Cl.: H04W 12/06 (09.01) H04L 29/06 (06.01) (21) Numéro de dépôt: 1004.1
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
Les enfants ayant besoin d une protection internationale
 FR Les enfants ayant besoin d une protection internationale Informations destinées aux enfants non accompagnés qui introduisent une demande de protection internationale conformément à l article 4 du Règlement
FR Les enfants ayant besoin d une protection internationale Informations destinées aux enfants non accompagnés qui introduisent une demande de protection internationale conformément à l article 4 du Règlement
(51) Int Cl.: H04L 12/24 (2006.01) H04L 12/14 (2006.01)
 Int Cl.: H04L 12/24 (2006.01) H04L 12/14 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 0 94 917 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 29.11.2006
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 0 94 917 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 29.11.2006
Rainshower System. Rainshower System
 27 032 27 418 27 174 Rainshower System Rainshower System D...1...1 I...5...5 N...9...9 GR...13 TR...17 BG...21 RO...25 GB...2...2 NL...6...6 FIN...10 CZ...14 SK...18 EST...22 CN...26 F...3...3 S...7...7
27 032 27 418 27 174 Rainshower System Rainshower System D...1...1 I...5...5 N...9...9 GR...13 TR...17 BG...21 RO...25 GB...2...2 NL...6...6 FIN...10 CZ...14 SK...18 EST...22 CN...26 F...3...3 S...7...7
(51) Int Cl.: H04L 29/12 (2006.01)
 Int Cl.: H04L 29/12 (2006.01)") (19) (11) EP 1 32 604 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.12.08 Bulletin 08/49 (21) Application number: 0197474.6 (22) Date of filing:
(19) (11) EP 1 32 604 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 03.12.08 Bulletin 08/49 (21) Application number: 0197474.6 (22) Date of filing:
ARRANGEMENT ET PROTOCOLE DE MADRID CONCERNANT L ENREGISTREMENT INTERNATIONAL DES MARQUES DEMANDE D ENREGISTREMENT INTERNATIONAL RELEVANT
 MM1(F) ARRANGEMENT ET PROTOCOLE DE MADRID CONCERNANT L ENREGISTREMENT INTERNATIONAL DES MARQUES DEMANDE D ENREGISTREMENT INTERNATIONAL RELEVANT EXCLUSIVEMENT DE L ARRANGEMENT DE MADRID (Règle 9 du règlement
MM1(F) ARRANGEMENT ET PROTOCOLE DE MADRID CONCERNANT L ENREGISTREMENT INTERNATIONAL DES MARQUES DEMANDE D ENREGISTREMENT INTERNATIONAL RELEVANT EXCLUSIVEMENT DE L ARRANGEMENT DE MADRID (Règle 9 du règlement
(51) Int Cl.: G06F 1/32 (2006.01) G06F 15/16 (2006.01)
 Int Cl.: G06F 1/32 (2006.01) G06F 15/16 (2006.01)") (19) TEPZZ_99699 B_T (11) EP 1 996 993 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 11.03.1 Bulletin 1/11 (21) Application number: 07709193.2 (22)
(19) TEPZZ_99699 B_T (11) EP 1 996 993 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 11.03.1 Bulletin 1/11 (21) Application number: 07709193.2 (22)
(51) Int Cl.: A61N 1/362 (2006.01) A61N 1/368 (2006.01) A61N 1/37 (2006.01) A61N 1/365 (2006.01) A61B 5/024 (2006.01)
 Int Cl.: A61N 1/362 (2006.01) A61N 1/368 (2006.01) A61N 1/37 (2006.01) A61N 1/365 (2006.01) A61B 5/024 (2006.01)") (19) TEPZZ 7 79 B_T (11) EP 2 737 92 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 17.06. Bulletin /2 (21) Numéro de dépôt: 131861.0 (1) Int Cl.: A61N
(19) TEPZZ 7 79 B_T (11) EP 2 737 92 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 17.06. Bulletin /2 (21) Numéro de dépôt: 131861.0 (1) Int Cl.: A61N
Europâisches Patentamt European Patent Office Office européen des brevets. Numéro de publication: 0 388 307 A1 DEMANDE DE BREVET EUROPEEN
 Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication: 0 388 307 A1 DEMANDE DE BREVET EUROPEEN Numéro de dépôt: 90400700.2 Int. Cl.5-. B60N 3/00 @ Date de dépôt:
Europâisches Patentamt European Patent Office Office européen des brevets Numéro de publication: 0 388 307 A1 DEMANDE DE BREVET EUROPEEN Numéro de dépôt: 90400700.2 Int. Cl.5-. B60N 3/00 @ Date de dépôt:
CONTRAT D ABONNEMENT DUO/TRIO
 CONTRAT D ABONNEMENT DUO/TRIO CONTACT COMMERCIAL tous les prix sont ttc INFO CLIENT M. MME LANGUE PRÉFÉRÉE: LU DE EN FR PT NOM, PRÉNOM MATRICULE SOCIAL RUE ET NUMÉRO CODE POSTAL VILLE ÉTAGE/APPART. I N
CONTRAT D ABONNEMENT DUO/TRIO CONTACT COMMERCIAL tous les prix sont ttc INFO CLIENT M. MME LANGUE PRÉFÉRÉE: LU DE EN FR PT NOM, PRÉNOM MATRICULE SOCIAL RUE ET NUMÉRO CODE POSTAL VILLE ÉTAGE/APPART. I N
printed by www.klv.ch
 Zentralkommission für die Lehrabschlussprüfungen des Verkaufspersonals im Detailhandel Lehrabschlussprüfungen für Detailhandelsangestellte 2006 Französisch Leseverständnis und gelenkte Sprachproduktion
Zentralkommission für die Lehrabschlussprüfungen des Verkaufspersonals im Detailhandel Lehrabschlussprüfungen für Detailhandelsangestellte 2006 Französisch Leseverständnis und gelenkte Sprachproduktion
CONTRAT D ABONNEMENT DUO/TRIO
 CONTRAT D ABONNEMENT DUO/TRIO CONTACT COMMERCIAL tous les prix sont ttc INFO CLIENT M. MME LANGUE PRÉFÉRÉE: LU NOM, PRÉNOM DE EN FR PT MATRICULE SOCIAL RUE ET NUMÉRO CODE POSTAL VILLE ÉTAGE/APPART. I N
CONTRAT D ABONNEMENT DUO/TRIO CONTACT COMMERCIAL tous les prix sont ttc INFO CLIENT M. MME LANGUE PRÉFÉRÉE: LU NOM, PRÉNOM DE EN FR PT MATRICULE SOCIAL RUE ET NUMÉRO CODE POSTAL VILLE ÉTAGE/APPART. I N
(51) Int Cl.: H04Q 7/22 (2006.01)
 Int Cl.: H04Q 7/22 (2006.01)") (19) (11) EP 1 908 313 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 24.12.08 Bulletin 08/2 (21) Application number: 0677836.9 (22) Date of filing:
(19) (11) EP 1 908 313 B1 (12) EUROPEAN PATENT SPECIFICATION (4) Date of publication and mention of the grant of the patent: 24.12.08 Bulletin 08/2 (21) Application number: 0677836.9 (22) Date of filing:
Les actions internationales pour l enseignement supérieur Un objectif de coopération internationale entre pays programmes et partenaires
 Les actions internationales pour l enseignement supérieur Un objectif de coopération internationale entre pays programmes et partenaires Pays programmes Pays membres de l UE Autres pays programmes : Iceland,
Les actions internationales pour l enseignement supérieur Un objectif de coopération internationale entre pays programmes et partenaires Pays programmes Pays membres de l UE Autres pays programmes : Iceland,
Schnellverschlusskupplungen in Messing Accouplements rapides en laiton
 Schnellverschlusskupplungen in Messing Accouplements rapides en laiton Typ 02 M3, Schlauch 2-3 mm NW 1,5 Kv 0,053 181 Type 02 M3, tuyaux 2-3 mm DN 1,5 Kv 0.053 Typ 20 M5 1 /8, Schlauch 3 6 mm NW 2,7 Kv
Schnellverschlusskupplungen in Messing Accouplements rapides en laiton Typ 02 M3, Schlauch 2-3 mm NW 1,5 Kv 0,053 181 Type 02 M3, tuyaux 2-3 mm DN 1,5 Kv 0.053 Typ 20 M5 1 /8, Schlauch 3 6 mm NW 2,7 Kv
Le marché de l assurance de protection juridique en Europe. Octobre 2013
 Le marché de l assurance de protection juridique en Europe Octobre 2013 Le marché de l assurance de protection juridique en Europe Octobre 2013 Dans sa dernière publication, RIAD, l Association internationale
Le marché de l assurance de protection juridique en Europe Octobre 2013 Le marché de l assurance de protection juridique en Europe Octobre 2013 Dans sa dernière publication, RIAD, l Association internationale
evelyne.hinque@bozar.be Adresse du profil d acheteur (URL): https://enot.publicprocurement.be/enot-war/previewnotice.do?
: https://enot.publicprocurement.be/enot-war/previewnotice.do?") 1/ 11 BE001 13/05/2014 - Numéro BDA: 2014-510517 Formulaire standard 2 - FR Bulletin des Adjudications Publication du Service Fédéral e-procurement SPF P&O - 51, rue de la Loi B-1040 Bruxelles +32 27905200
1/ 11 BE001 13/05/2014 - Numéro BDA: 2014-510517 Formulaire standard 2 - FR Bulletin des Adjudications Publication du Service Fédéral e-procurement SPF P&O - 51, rue de la Loi B-1040 Bruxelles +32 27905200
RÈGLEMENTS INTÉRIEURS ET DE PROCÉDURE
 L 82/56 2.6.204 RÈGLEMENTS INTÉRIEURS ET DE PROCÉDURE RÈGLEMENT INTÉRIEUR DU CONSEIL DE SURVEILLANCE PRUDENTIELLE DE LA BANQUE CENTRALE EUROPÉENNE LE CONSEIL DE SURVEILLANCE PRUDENTIELLE DE LA BANQUE CENTRALE
L 82/56 2.6.204 RÈGLEMENTS INTÉRIEURS ET DE PROCÉDURE RÈGLEMENT INTÉRIEUR DU CONSEIL DE SURVEILLANCE PRUDENTIELLE DE LA BANQUE CENTRALE EUROPÉENNE LE CONSEIL DE SURVEILLANCE PRUDENTIELLE DE LA BANQUE CENTRALE
Exemple PLS avec SAS
 Exemple PLS avec SAS This example, from Umetrics (1995), demonstrates different ways to examine a PLS model. The data come from the field of drug discovery. New drugs are developed from chemicals that
Exemple PLS avec SAS This example, from Umetrics (1995), demonstrates different ways to examine a PLS model. The data come from the field of drug discovery. New drugs are developed from chemicals that
La réglementation Mardi de la DGPR. sur les produits biocides 05/04/2011
 La réglementation r Mardi de la DGPR 05/04/2011 sur les produits biocides Direction générale de la prévention des risques Service de la prévention des nuisances et de la qualité de l environnement Département
La réglementation r Mardi de la DGPR 05/04/2011 sur les produits biocides Direction générale de la prévention des risques Service de la prévention des nuisances et de la qualité de l environnement Département
(51) Int Cl.: G09F 27/00 (2006.01)
 Int Cl.: G09F 27/00 (2006.01)") (19) (11) EP 1 644 909 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 13.04.11 Bulletin 11/1 (21) Numéro de dépôt: 04767648.1 (22) Date de dépôt: 09.07.04
(19) (11) EP 1 644 909 B1 (12) FASCICULE DE BREVET EUROPEEN (4) Date de publication et mention de la délivrance du brevet: 13.04.11 Bulletin 11/1 (21) Numéro de dépôt: 04767648.1 (22) Date de dépôt: 09.07.04
Office de l harmonisation dans le marché intérieur (OHMI) Indications requises par l OHMI: Référence du déposant/représentant :
 Indications requises par l OHMI: Référence du déposant/représentant :") Office de l harmonisation dans le marché intérieur (OHMI) Réservé pour l OHMI: Date de réception Nombre de pages Demande d enregistrement international relevant exclusivement du protocole de Madrid OHMI-Form
Office de l harmonisation dans le marché intérieur (OHMI) Réservé pour l OHMI: Date de réception Nombre de pages Demande d enregistrement international relevant exclusivement du protocole de Madrid OHMI-Form
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
philippe.bogaert@nbb.be Fax: +32 22213106 Soumission des offres et des demandes de participation par voie électronique (URL):
:") 1/ 13 BE001 16/7/2015 - Numéro BDA: 2015-518857 Formulaire standard 2 - FR Bulletin des Adjudications Publication du Service Fédéral e-procurement SPF P&O - 51, rue de la Loi B-1040 Bruxelles +32 27905200
1/ 13 BE001 16/7/2015 - Numéro BDA: 2015-518857 Formulaire standard 2 - FR Bulletin des Adjudications Publication du Service Fédéral e-procurement SPF P&O - 51, rue de la Loi B-1040 Bruxelles +32 27905200
Bundesdruckerei Berlin
 Europaisches Patentamt European Patent Office Office européen des brevets @ Numéro de publication : 0 359 622 A1 DEMANDE DE BREVET EUROPEEN (S) Numéro de dépôt: 89402410.8 @ Date de dépôt: 05.09.89 (g)
Europaisches Patentamt European Patent Office Office européen des brevets @ Numéro de publication : 0 359 622 A1 DEMANDE DE BREVET EUROPEEN (S) Numéro de dépôt: 89402410.8 @ Date de dépôt: 05.09.89 (g)
luc.delaisse@nbb.be Fax: +32 22213106 Soumission des offres et des demandes de participation par voie électronique (URL):
:") 1/ 14 BE001 19/4/2013 - Numéro BDA: 2013-508146 Formulaire standard 2 - FR Bulletin des Adjudications Publication du Service Fédéral e-procurement SPF P&O - 51, rue de la Loi B-1040 Bruxelles +32 27905200
1/ 14 BE001 19/4/2013 - Numéro BDA: 2013-508146 Formulaire standard 2 - FR Bulletin des Adjudications Publication du Service Fédéral e-procurement SPF P&O - 51, rue de la Loi B-1040 Bruxelles +32 27905200
Multiple issuers. La cotation des actions ROBECO ci-dessous est suspendue sur EURONEXT PARIS dans les conditions suivantes :
 CORPORATE EVENT NOTICE: Suspension de cotation Multiple issuers PLACE: Paris AVIS N : PAR_20141002_07393_EUR DATE: 02/10/2014 MARCHE: EURONEXT PARIS La cotation des fonds mentionnés ci-dessous sera suspendue
CORPORATE EVENT NOTICE: Suspension de cotation Multiple issuers PLACE: Paris AVIS N : PAR_20141002_07393_EUR DATE: 02/10/2014 MARCHE: EURONEXT PARIS La cotation des fonds mentionnés ci-dessous sera suspendue
NEW Fin Fan / Air cooled condenser cleaning
 Air cooled Condensers ( ACC ) Cleaning Air Cooled heat exchangers ( Finfan) Cleaning Cleaning Services Permanente installation NEW Fin Fan / Air cooled condenser cleaning New and revolutionnary high pressure
Air cooled Condensers ( ACC ) Cleaning Air Cooled heat exchangers ( Finfan) Cleaning Cleaning Services Permanente installation NEW Fin Fan / Air cooled condenser cleaning New and revolutionnary high pressure
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Le commerce de détail en Europe : la diversité des tissus commerciaux
 Le commerce de détail en Europe : la diversité des tissus commerciaux Claire de Kermadec* Les habitudes culturelles, la taille et la dynamique des marchés modèlent le paysage du commerce de détail en Europe.
Le commerce de détail en Europe : la diversité des tissus commerciaux Claire de Kermadec* Les habitudes culturelles, la taille et la dynamique des marchés modèlent le paysage du commerce de détail en Europe.
FEDERATION INTERNATIONALE DE L AUTOMOBILE. Norme NORME FIA CONCERNANT LES BARRIERES DE SECURITE
 FEDERATION INTERNATIONALE DE L AUTOMOBILE Norme NORME FIA CONCERNANT LES BARRIERES DE SECURITE Ce cahier des charges relatif aux essais a été préparé sous la direction du Groupe de Recherche de la FIA.
FEDERATION INTERNATIONALE DE L AUTOMOBILE Norme NORME FIA CONCERNANT LES BARRIERES DE SECURITE Ce cahier des charges relatif aux essais a été préparé sous la direction du Groupe de Recherche de la FIA.