Variation de vitesse des machines asynchrones
|
|
|
- Virginie Michele Grenier
- il y a 10 ans
- Total affichages :
Transcription
1 Variation de vitesse des machines asynchrones Étude des solutions de variation de vitesse pour machine asynchrone de puissance inférieure à 1 MW Objectif Choisir et mettre en œuvre un système de variation de vitesse pour machine asynchrone Pré-requis Cours de physique sur la machine asynchrone Grafcet Mise en œuvre des automates programmables industriels Savoirs associés Comparaison des solutions en variationde vitesse Etude d un variateur de fréquence en U/f Introduction au contrôle vectoriel 1

2 Sommaire Introduction I. Principe de la variation de vitesse des machines asynchrones 1. Quadrants de fonctionnement 2. Schéma équivalent et expression du couple 3. Variation de vitesse de la machine asynchrone II. Alimentation à fréquence statorique variable 1. Onduleur de tension à fréquence variable 1.1.Caractéristiques C = f (ω) et formes d ondes 1.2.Etude d un exemple industriel 1.3.Mise en œuvre d un exemple industriel 2. Onduleur de tension à contrôle du couple instantané 2.1.Entraînement à vitesse variable 2.2.Comparaison des différentes techniques de commande des moteurs 2.3. Structure d un exemple industriel ABB Direct Tork Control Travail personnel 2

3 Introduction La grande majorité des applications d entraînement par moteur électrique ne nécessite pas de réglage ou de maintien du couple, de la vitesse, de l accélération ou d autres grandeurs caractéristiques. Il n est donc pas utile de mettre en œuvre des moyens de réglage de ces grandeurs. Un simple dispositif de démarrage peut s avérer indispensable dans certains cas. La machine universelle pour les faibles puissances en alimentation monophasée et la machine asynchrone à cage sont les plus couramment utilisées pour une alimentation directe sur le réseau. Le point de fonctionnement statique dépend donc exclusivement des caractéristiques du réseau, de la machine, et de la charge entraînée. Bien entendu toute variation des caractéristiques de la machine, de la charge et du réseau d alimentation se traduira par un déplacement du point de fonctionnement. Les accélérations et les décélérations dépendent, elles aussi, exclusivement des caractéristiques de la machine, de la charge et du réseau d alimentation sans possibilité de réglage. Un certain nombre d applications demandent une adaptation du couple, de la vitesse, de l accélération ou d autres grandeurs pour une conduite satisfaisante du procédé : Démarrage progressif du procédé, accélération et décélération contrôlée. Contrôle précis du couple, de la vitesse en régime statique et/ou dynamique. Réglage/asservissement des flux de production à la demande. L investissement pour une solution en vitesse variable électronique ne se fera que si il apporte des gain en : Qualité des produits finis (tôles pour l industrie agro-alimentaire, papier ) Economies de production (pompage/propulsion à débit variable ) Souplesse d exploitation (adaptation des flux de production à la demande ) Réduction de maintenance (entraînement direct se substituant à des éléments mécaniques ) Pour bien choisir un système d entraînement à vitesse variable il est absolument nécessaire de connaître les contraintes imposées par la charge à l ensemble réseau/convertisseur/machine. Caractéristique couple vitesse de la machine entraînée Inertie de la machine entraînée Performances statiques et dynamiques attendues Régime et service dans tous les cas d exploitation On entend par régime l ensemble des grandeurs électriques et mécaniques caractérisant le fonctionnement d une machine à un instant donné On entend par service les différents régimes auxquels la machine est soumise avec leur durées respectives et leur ordre de succession. Le choix d un ensemble convertisseur/machine pour une application spécifique résulte de l adéquation la plus parfaite entre le cahier des charges, les solutions techniques disponibles à un instant donné, les moyens humains et la rentabilité financière de l investissement. 3

4 I. Principe de la variation de vitesse des machines asynchrones 1. Quadrants de fonctionnement Les machines synchrone, asynchrone et à Vitesse courant continu sont naturellement Frein avec vitesse positive F Moteur avec vitesse positive F réversibles. Pour bénéficier de cette propriété, il faut que le convertisseur et la source soient également réversibles. Si la source ne l est pas on ne peut pas récupérer l énergie lors d une phase de freinage de la machine mais on peut II I Couple la dissiper dans des rhéostats ( réversibilité dissipatrice ). Le choix d une structure III IV convertisseur/machine 1, 2 ou 4 quadrants F F repose exclusivement sur le cahier des charges. Quadrant I seul : la machine ne tourne que dans un seul sens de rotation, le couple est positif ou nul ( accélérations contrôlées Frein avec vitesse négative et décélération non contrôlées ) 2 Quadrants (I et II) : la machine ne tourne que dans un seul sens de rotation, le couple est positif ou négatif ( accélérations et décélération contrôlées ) 2 Quadrants (I et IV) : la machine tourne dans les deux sens de rotation ( pour le sens inverse la charge est nécessairement entraînante ), le couple est toujours positif ( accélérations contrôlées et décélération non contrôlées ) 4 Quadrants (I à IV) : la machine tourne dans les deux sens de rotation quelque soit la charge entraînée le couple est positif ou négatif ( accélérations et décélération contrôlées ) Moteur avec vitesse négative 2. Schéma équivalent et expression du couple Le schéma équivalent d une phase en régime sinusoïdal équilibré est le suivant : Rs Is I r Nω V V Ls R/g C est à partir de ce schéma que nous allons donner l expression du couple électromagnétique produit par la machine. Exprimons la puissance transmise au rotor. Qui après quelques manipulations peut s écrire. P = 3. R/g. (I r) 2 = Ce. Ωs 4
.")
5 V ' R / g Ce = 3p ω ω ( R / g) 2 + ( Nω) 2 3. Variation de vitesse de la machine asynchrone C Moteur Point de fonctionnement Charge Ωs Réglage par variation du nombre de paires de pôles 2 Ω Le point de fonctionnement (C, Ω) dans le quadrant I en régime établi de l ensemble machine plus charge se situe à l intersection des caractéristiques Ce = f(ω) du moteur et Cr = f(ω) de la charge. Le réglage de la vitesse de la machine asynchrone est donc obtenu en agissant sur le couple qu elle produit, soit, si l on se réfère à son expression ci-dessus : le nombre de paires de pôles, la tension d alimentation de la machine, le glissement ou la fréquence d alimentation de la machine. Ceci donnant une variation non continue de la vitesse ce mode n est donc pas envisagé pour un réglage fin du point de fonctionnement désiré. Réglage par variation de tension Le couple électromagnétique de la machine asynchrone est proportionnel au carré de la tension d alimentation statorique. Il est donc possible d envisager un ajustement de la vitesse au dessous de la vitesse nominale en modifiant la tension d alimentation statorique avec un gradateur triphasé. Cette solution est le plus souvent utilisée pour le démarrage de charges à caractéristique de couple quadratique (Cr = k. Ω 2 ). Réglage par action sur le glissement L utilisation de résistances rotorique permet un réglage de la vitesse au dessous de la vitesse nominale mais avec un rendement déplorable. on essaiera donc de récupérer cette énergie transmise au rotor : c est la cascade hyposynchrone réservée à la très forte puissance pour des machines à rotor bobiné. Réglage par variation de fréquence La fréquence de rotation de la machine étant au glissement près proportionnel à la fréquence d alimentation des enroulements statoriques, on essaiera de créer pour ces enroulements un réseau à fréquence variable ce sont les Onduleurs de tension. On peut aussi chercher à injecter des courants dans les enroulement pour imposer le couple de la machine ce sont les Onduleurs de courant ou commutateurs de courant. On peut également convertir directement la fréquence du réseau industriel en une fréquence variable plus faible (de 0 à 1/3 de la fréquence réseau) à l aide d un cycloconvertisseur à commutation naturelle piloté lui aussi en fréquence en courant ou vectoriellement. 5

6 II. Alimentation à fréquence statorique variable Pour des puissance allant jusqu au Megawatt la structure de l onduleur reste la même, seuls les calibres des composants vont croissants avec la puissance de l équipement. Cette structure possède deux variantes : une première à réversibilité rhéostatique (énergie de freinage dissippée), MAS une seconde à réversibilité complète (énergie de freinage restituée au reseau). MAS La fonction sera donc définie uniquement par la commande de cette structure. Cette commande se décline en deux variantes essentielles qui de plus en plus vont donner naissance à un seul et même équipement industriel dont on pourra distinguer la commande par le programme sélectionné. Le point commun des ces onduleurs de tension MLI est qu ils peuvent être contrôlés : en fréquence (en vitesse au glissement près ω s ou en couple moyen ω r ou Is) vectoriellement (en couple instantané I d I q ) Le mode d alimentation le plus couramment répandu est l onduleur de tension à fréquence variable. C est une solution simple qui permet de régler la vitesse d une machine asynchrone à cage à la précision du glissement près. 1. Onduleur de tension à fréquence variable 1.1.Caractéristiques C = f (ω) et formes d ondes 2 V ' R / g L expression du couple Ce = 3p ω devient pour des glissements ω ( R / g) 2 + ( Nω) 2 2 gω faibles Ce = 3p( Φs) dans laquelle apparaît le flux statorique, réglable par le rapport R V /ω. On essaiera de maintenir ce rapport V /ω constant et nominal en réglant V et ω appliqué au moteur. Ceci permet d exploiter au mieu les caractéristiques de la machine alimentée. Le système d alimentation de la machine asynchrone à cage devra donc : Imposer des courants sinusoïdaux équilibrés de fréquence variable dans la machine. 6

7 Maintenir l état magnétique nominal de la machine en gardant Φs = V /ω constant (en réglant la valeur de V en fonction de celle de ω et du couple résistant). Caractéristiques Ce = f (Ω) correspondantes pour différentes fréquences. Ce 15Hz 30Hz 40Hz 50Hz 60Hs 70Hz 80Hz Remarque : au delà de 50 Hz la valeur efficace de la tension d alimentation de la machine ne croît plus, Φs = V /ω n est plus maintenu constant : la valeur maximale du couple décroît donc lorsque la fréquence d alimentation croît au delà de 50 Hz. Nota : Seules les grandeurs moyennes (Is et Ce) sont contrôlées pas les grandeurs instantanées. Les régimes à variation lente peuvent être envisagés avec cette approche, pour l étude des variations rapides (démarrage, saut de fréquence) une approche avec les grandeurs instantanées est indispensable et mène à des résultats sensiblement différents. Forme d onde obtenue en commande pleine onde. Sur le graphe ci-dessous le moteur est alimenté par des créneaux de trension 2/3, 1/3. Ceci permet d obtenir un courant dont le spectre (voir graphe page suivante) laisse apparaître une forte présence des harmoniques de rang 5 et 7 et par conséquent une ondulation de couple à 6 f. 7
 sont contrôlées pas les grandeurs instantanées.")
8 209.4m 220.0m 230.0m 240.0m 249.4m VM couple tension courant m 220.0m 230.0m 240.0m 249.4m 0.025k k 0.667k 1.000k 1.333k 1.550k I"A Hz 350 Hz Hz 650 Hz Spectre du courant k 0.333k 0.667k 1.000k 1.333k 1.550k On peut être amené à chercher à repousser les harmoniques indésirables (génératrices de pertes joules et de couple pulsatoire dans la machine) vers des fréquences plus élevées. Cette objectif nous conduit à une alimentation en modulation de largeur d impulsion (M.L.I.) dont un exemple est donné cidessous m m 200.0m 205.0m 210.0m 215.0m 220.0m 225.4m VM m 195.0m 200.0m 205.0m 210.0m 215.0m 220.0m 225.4m 8

9 Le spectre du courant est donné ci-contre. Le premier harmonique se situe au rang 21 et il est d importance moindre. Pour le maintien du rapport V /f constant il est nécéssaire de faire varier la valeur efficace du fondamental de la tension appliquée aux enroulements statoriques. Ceci est possible soit en réglant la largeur de chaque impulsion proportionnellement à la valeur efficace désirée, soit en surmodulant à fréquence fixe et élevée (fonction hacheur) la forme d onde M.L I. qui garde toujours le même gabari k 0.500k k 1.500k 2.000k 2.500k 3.350k I"A Spectre du courant MLI k 0.500k 1.000k 1.500k 2.000k 2.500k 3.350k 9
 la forme d onde M.L I. qui garde toujours le même gabari. 0.025k 0.500k 7.831 1.000k 1.500k 2.000k 2.500k 3.350k I\"A... 6.667 6.667 Spectre du courant MLI 5.000 5.000 3.")
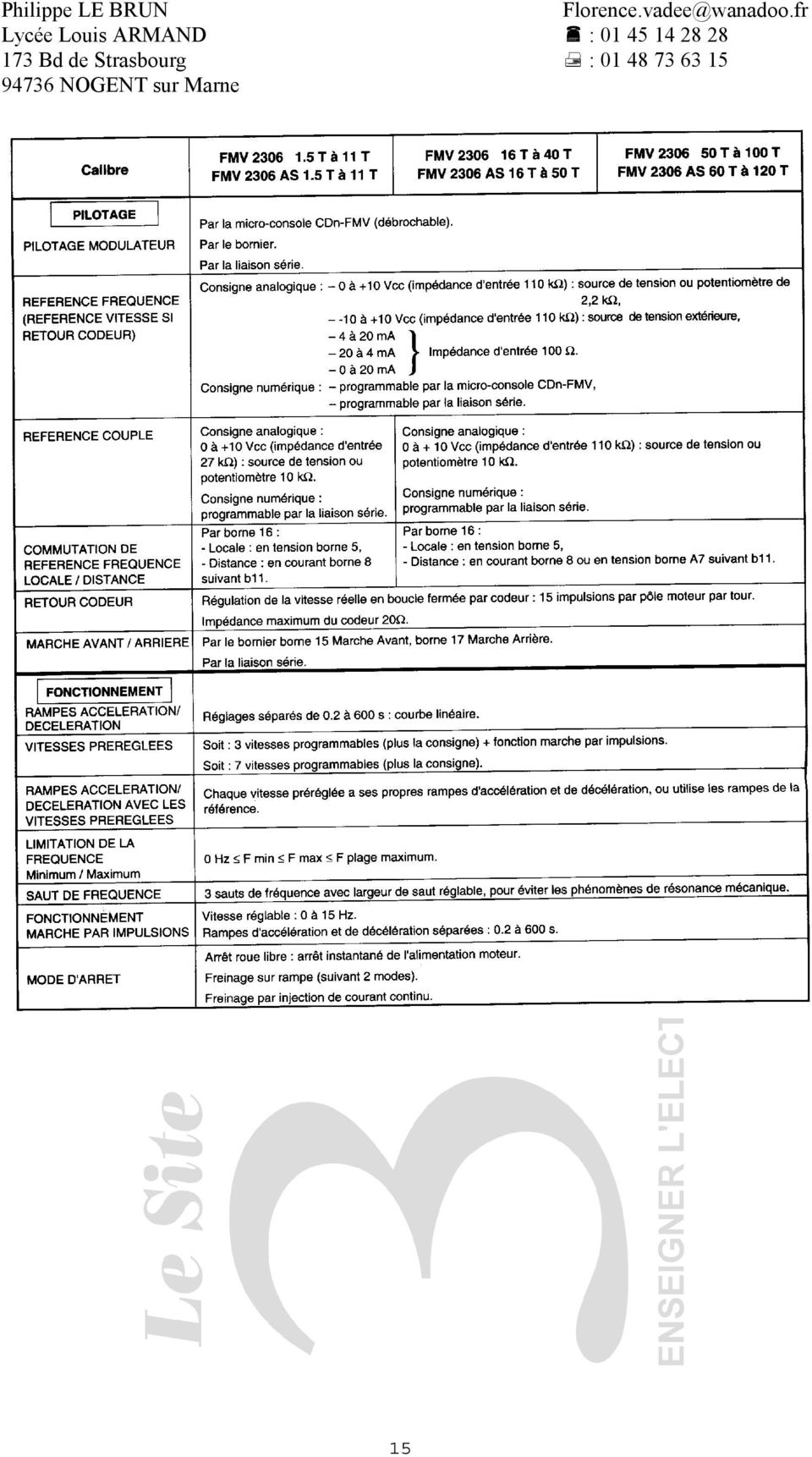
10 1.2.Etude d un exemple industriel La vitesse de synchronisme d'un moteur asynchrone à cage est fonction de son nombre de paires de pôles et de la fréquence de son alimentation. Ces grandeurs sont liées par l'expression : f N = p Ainsi, changer la fréquence revient à changer la vitesse de synchronisme d'un moteur donné. Cependant, changer la fréquence sans changer la tension d'alimentation fait varier la densité du flux magnétique dans le moteur. Aussi les modulateurs FMV 2306 et font varier simultanément TENSION et FREQUENCE de sortie. Ceci permet d'optimiser la courbe de couple du moteur et d'éviter son échauffement. Les modulateurs FMV 2306 alimentent le moteur par une tension générée à partir d'une tension interne continue et fixe. La tension est produite en modulation de largeur d'impulsions (M.L.I.). Il délivre au moteur un courant proche d'une sinusoïde avec peu d'harmoniques. Le modulateur se compose de : UN REDRESSEUR de la tension du réseau. UN CONDENSATEUR DE FILTRAGE donnant une tension continue fixe. UN SYSTEME DE MISE SOUS TENSION limitant la pointe de courant à la mise sous tension. UN ONDULEUR convertissant la tension continue en une tension alternative modulée en tension et en fréquence. UNE CARTE ELECTRONIQUE DE CONTROLE comportant le microprocesseur, le circuit ASIC générateur de la MLI (PWM) et les circuits d'amplification des signaux de commande. UN MODULE DE FREINAGE permettant l évacuation de l énérgie durant une phase de freinage UNE MESURE INTERNE DE COURANT pour une commande en couple moyen. DES ENTREES SORTIES LOGIQUES ET ANALOGIQUES pour contrôler le variateur. 10

11 UNE MICRO-CONSOLE permettant le paramétrage, la lecture d'informations et le contrôle du modulateur. 11

12 Le tableau ci-dessous permet de faire un choix de variateur en association avec un moteur (la puissance utile de ce dernier permet de faire ce choix). Il ne faudra pas prendre en compte un éventuel déclassement du moteur pour faire le choix du convertisseur de fréquence. On prendra directement la puissance exprimée en sevice S1 dans des conditions normales d exploitation. 12

13 REGULATION : le constructeur propose trois mode de commande de son convertisseur : Onduleur de tension controlé en fréquence (réglage aproximatif de la vitesse du moteur, le glissement n est pas compensé et la vitesse dépend de la charge accouplée au moteur) Onduleur de tension controlé en courant statorique(réglage du couple moyen du moteur, la vitesse dépend de la charge accouplée au moteur) Onduleur de tension controlé en fréquence avec boucle de régulation de vitesse (réglage précis de la vitesse du moteur avec capteur de vitesse necéssaire, la vitesse est indépendante de la charge) 13

14 LOI U/f : le constructeur propose deux types de loi U/f : Le rapport U/f est constant (mais réglable) ce qui permet de travailler à couple maximal constant (et réglable) sur une plage de fonctionnement donnée. Si l on souhaite élargir la plage à couple maximal constant il est possible de réduire la valeur U/f par rapport à la valeur nominale, cependant le couple maximal se trouve lui aussi réduit par rapport à sa valeur nominale. C est le mode de commande le plus utilisé. Le rapport U/f est automatiquement réglé en fonction de la charge ce qui permet d économiser de l énergie et de réduire le bruit de fonctionnement pour les faibles charges. Ce mode n est possible que pour les charges à caractéristique de couple quadratique C = k.n 2 FREQUENCE DE DECOUPAGE : le constructeur vous indique cette valeur C est la fréquence à laquelle est réalisée la modulation de largeur d impulsions, plus la fréquence est élevée plus les harmoniques indésirables sont à fréquence élevée mais les pertes en commutation croissent elles aussi avec la fréquence. 14

15 15
16 FREINAGE PAR INJECTION DE COURANT CONTINU : lors d une phase de freinage on associe deux mode de freinage : Pour les fréquences élevées on alimente le stator à une fréquence légèrement inférieure à p (nombre de paires de pôles) fois la vitesse de rotation angulaire du rotor ce qui revient à faire fonctionner la machine en géneratrice hypersynchrone. Ce mode de freinage reste valable jusqu à quelques Hertz. 16

17 Pour la fin du freinage on crée un champ fixe dans la machine en injectant du courant continu. L onduleur fonctionne alors en hacheur. 17

18 1.3.Mise en œuvre d un exemple industriel 18

19 Explications du schéma proposé par le constructeur Partie puissance Le raccordement du moteur au variateur de fréquence se fait directement (sans relais thermique) la fonction de protection thermique du moteur est souvent incluse dans le convertisseur. Pour les cas délicats il est necéssaire de contrôler la température directement dans les enroulements moteur. Des sondes CTP ou autres sont logées dans ces enroulements et reliées au variateur (bornes 4-9) qui contrôle donc en permanence la température moteur et peut, en cas d échauffement anormal, couper son alimentation pour le laisser refroidir et prévenir l environement du défaut (bornes 1-2-3) L ensemble convertisseur/moteur doit être relié sur le réseau par l intermédiaire d un dispositif de sectionnement (sectionneur + fusibles, disjoncteur magnéto-thermique ) incluant ou non les protections contre les court-circuits (fusibles type Gl ou disjoncteur courbe C) permettant toute intervention sur l installation. Il est aussi quelque fois indispensable de prévoir un dispositif de commande (contacteur) pour assurer un arrêt certain que l électronique ne garantie pas seule. Partie commande La référence fréquence est donnée par une tension appliquée entre les bornes 4 (-) et 5 (+) comprise entre 0 et 10 V DC. Il en serait de même pour une référence couple entre les bornes 4 (-) et 7 (+). L entrée codeur permet d avoir un retour vitesse par l intermédiaire d un codeur incrémental (16 impulsions par pôle machine) pour un mode de fonctionnement avec régulation de vitesse. En l absence de défaut externe (bornes reliées) le système démarre en avant (bornes reliées) ou en arrière (bornes reliées) grace à la fermeture de KA1 (enclenché par SB2 et automaintenu si SB3 est en position normal) enclenchant la fermeture de KM1. La montée en vitesse se fait suivant une rampe programmée. En cas de demande d arrêt (appui sur SB1) KA1 est aussitôt désalimenté mais un contact temporisé au repos de KA1 laisse au variateur le temps de ralentir suivant une rampe programmée. Ce système est doublé d un contact de contrôle du variateur s ouvrant lorsque la fréquence de sortie est au dessous d un seuil programmé (Z1-Z2). Pour un fonctionnement impulsionnel le variateur doit être informé (bornes 11-A12 reliées). SB3 est en position impulsion, il n y a donc pas d automaintien possible sur KA1. Le fonctionnement est en tout point identique à ce qui à été dit aux deux chapitre précédent mais sans automaintien. On notera la présence des deux fusible type Am (Fu5 et Fu6 un par phase) de protection contre les court-circuits phase-phase et phase-terre en amont du transformateur Tc. On remarque également la présence d un pôle de précoupure toujours en amont du transformateur Tc. Ce transformateur Tc, avec écran d antiparasitage relié à la terre, reforme un régime de neutre TT grace à la liaison d une de ces bornes de sortie à la terre. Il est lui même protégé par un fusible (Fu7) de type Gl. En cas de manœuvre de Qs en charge ou d arrêt d urgence (AU) le variateur est immédiatement mis hors tension et l arrêt du moteur est libre. 19
 L ensemble convertisseur/moteur doit être relié sur le réseau par l intermédiaire d un dispositif de")
20 2. Onduleur de tension à contrôle du couple instantané 2.1.Entraînement à vitesse variable Pour bien comprendre ce qu est un entraînement à vitesse variable, il faut au préalable comprendre que sa fonction de base est de réguler le débit d énergie entre le réseau d alimentation électrique et l application. L énergie est transmise à l application par l intermédiaire de l arbre mécanique du moteur. Deux grandeurs physiques décrivent l état de l arbre moteur : le couple et la vitesse de rotation. Pour contrôler et réguler le débit d énergie, il faut par conséquent agir sur ces deux grandeurs. Dans la pratique, on agit sur une de ces deux variables, et on parle alors de régulation de couple ou de régulation de vitesse. Dans un entraînement à vitesse variable fonctionnant en mode régulation de couple, la vitesse est fonction de la charge. Inversement, lorsqu il fonctionne en mode régulation de vitesse, le couple est également fonction de la charge. A l origine, seuls les moteurs à courant continu étaient utilisés pour les entraînements à vitesse variable car ils permettaient d obtenir la vitesse et le couple requis sans recourir à des dispositifs électroniques complexes. Cependant, le développement des variateurs de vitesse à courant alternatif résulte en partie de la volonté d obtenir les niveaux de performances très élevés des moteurs à courant continu (en termes de temps de réponse en régulation de couple et de précision en régulation de vitesse) avec des moteurs à courant alternatif, réputés pour leur robustesse, leur coût plus abordable et leur simplicité de maintenance. 2.2.Comparaison des différentes techniques de commande des moteurs Entraînements à courant continu Entraînements à courant alternatif Les spécificités : Les spécificités (commande en fréquence) : Orientation du flux assurée par un ensemble mécanique (collecteur et balais). Les variables de commande sont le courant d induit et le courant d'inducteur, mesurés DIRECTEMENT sur le moteur. La régulation de couple est directe. Les avantages : Régulation de couple précise et rapide. Précision dynamique élevée en régulation de vitesse. Simplicité de la technique de commande. Les inconvénients : Fiabilité des moteurs. Contraintes de maintenance. Coût d achat élevé des moteurs. Surcoûts des capteurs. Les variables de commande sont la tension et la fréquence. Simulation de la tension c.a. sinusoïdale par un modulateur. Contrôle de flux avec rapport U/f constant. Entraînement en boucle ouverte. Le couple est fonction de la charge. Les avantages : Faible encombrement. Robustesse, légéreté et compacité. Coût réduit. Maintenance réduite. Simplicité du fait de l'absence de capteur. Les inconvénients : L'état électromagnétique du moteur n'est pas pris en compte. Pas de contrôle, ni de régulation de couple. 20

21 Temps de réponse plus longs du fait du modulateur. Entraînements à courant alternatif Les spécificités (contrôle vectoriel modulation MLI) : Contrôle indirect de l'orientation du flux comme pour un entraînement c.c. Modélisation des caractéristiques électriques du moteur. Entraînement en boucle fermée. Régulation INDIRECT du couple. Les avantages : Faible encombrement. Robustesse, légéreté et compacité. Maintenance réduite. Temps de réponse courts en régulation de couple. excellente précision en régulation de vitesse et de position. Couple maxi à vitesse nulle. Performances comparables à celles des entraînements c.c. Les inconvénients : Utilisation obligatoire d'un capteur de position angulaire. Technique coûteuse. 21
22 Entraînements à courant alternatif Les spécificités (contrôle et modulation vectoriel) : Contrôle direct de l'orientation du flux comme pour un entraînement c.c. Modélisation des caractéristiques électriques du moteur. Entraînement en boucle fermée. Régulation DIRECT du couple. Les avantages : Faible encombrement. Robustesse, légéreté et compacité. Maintenance réduite. Simplicité du fait de l'absence de capteur. Temps de réponse extrèmement courts en régulation de couple. bonne précision en régulation de vitesse et de position. (excellente avec codeur) Couple maxi à vitesse très faible. (à vitesse nulle avec codeur) Capteur de position angulaire facultatif. (nécessaire pour positionnement ou grande précision sur la vitesse) Les inconvénients : Technique très coûteuse. 2.3.Structure d un exemple industriel ABB Direct Tork Control 22
23 1 Mesure de la tension et du courant En mode de fonctionnement normal, seuls le courant sur deux phases du moteur et la tension du bus c.c. sont rélevés, ainsi que la position des commutateurs de l onduleur. 2 Modèle Moteur Adaptatif Les valeurs rélevées sur le moteur sont fournies au Modèle Moteur Adaptatif. La modélisation mathématique du fonctionnement du moteur permet de calculer de manière très précise les données du moteur. Lors de la mise en service du variateur DTC, le Modèle Moteur collecte des données en exécutant la fonction d identification du moteur. Il s agit d un véritable autocalibrage au cours duquel des grandeurs telles que la résistance statorique, l inductance mutuelle et les coefficients de saturation sont relevées ainsi que l inertie du moteur. Aucun capteur de position ou de vitesse n est nécessaire si un niveau de précision statique de vitesse avec une erreur de vitesse de 0,5 % est requis, comme l exige la plupart des applications industrielles. 3 Comparateur de couple et comparateur de flux Les signaux de commande des commutateurs (composants de puissance) sont élaborés dans les comparateurs de couple et de flux. Les valeurs estimés de couple et de flux sont transmises aux comparateurs où elles sont comparées, toutes les 25 microsecondes, à une consigne de couple et une consigne de flux. Ces signaux sont ensuite transmis à la logique de commutation optimisée. 4 Logique de commutation optimisée Le bloc de la logique de commutation optimisée intègre un processeur numérique du signal de 40 MHz (technologie DSP) et un circuit ASIC dont la fonction est de déterminer la séquence de commutation de l onduleur. Par ailleurs, tous les signaux de commande sont transmis par liaisons optiques, garantie d une transmission à très grande vitesse. Le recours à ces technologies les plus avancées et à de telles vitesses de traitement et de communication permet d optimiser, toutes les 25 micro-secondes, la séquence de commutation des semiconducteurs de l onduleur, et ainsi générer ou maintenir le couple moteur très précisément. La séquence de commutation optimale est ainsi établie à chaque cycle de commande de telle sorte qu il n y a pas de séquence prédéterminée. Ce taux d actualisation est un élément fondamental des performances de la technologie DTC ; en effet, les principales variables de commande du moteur sont actualisées fois par seconde. D une part, c est ce qui permet d agir très rapidement au niveau de l arbre moteur et, d autre part, de telles capacités de traitement sont nécessaires au Modèle Moteur pour actualiser ces variables. C est cette vitesse de traitement qui est principalement à l origine des performances de la technologie DTC, notamment l erreur statique de vitesse en régulation de vitesse, sans capteur, inférieure à 0,5 % et le temps de montée du couple inférieur à 2 ms. 5 Régulateur de consigne de couple Au sein du régulateur de consigne de couple, la valeur du signal de sortie de la régulation de vitesse est limitée par les limites de couple et la tension du bus c.c. Il inclut également une régulation de vitesse pour les applications où un signal de couple externe est utilisé. La consigne de couple interne issue de ce bloc est envoyée au comparateur de couple. 6 Régulateur de vitesse Le bloc du régulateur de vitesse est constitué d un régulateur PID et d un compensateur d accélérateur. Le signal de consigne de vitesse externe est comparé à la valeur du signal de vitesse issu du Modèle Moteur. La valeur d écart est ensuite transmise à la fois au régulateur PID et au compensateur d accélérateur. La valeur finale correspond à la somme des valeurs de sortie de ces deux derniers. 7 Régulateur de consigne de flux Une valeur absolue de flux statorique peut être fournie par le régulateur de consigne de flux au bloc comparateur de flux. C est l aptitude à contrôler et à modifier cette valeur absolue qui 23
24 permet de réaliser de nombreuses fonctions du variateur, notamment l optimisation du flux, le freinage par contrôle de flux et l affaiblissement de champ. 24
25 Travail personnel 1. Mise en œuvre et programmation d un convertisseur en U/f pour machine asynchrone. 25
26 26
27 27
28 28
29 29
30 1. Donner le schéma de raccordement du variateur ci-dessous à partir du reseau 3 x 400V 50 Hz - Un voyant signalera un défaut ou une mise hors tension du variateur (allumé sur défaut) - Prise en compte d un défaut extérieur (contact no et nc disponible) - Un bouton poussoir (no) situé sur le pupitre permet l effacement du défaut - Un seul sens de rotation est utile : Avant - Le variateur est toujours en marche c est la consigne en 7 qui permet l arrêt (0 VDC) - La consigne fréquence est donnée par un module de sortie analogique 0 10 VDC - Les rampes d accélération et de décélération ont une durée de 5s et 7s respectivement - L arrêt se fait avec contrôle de la tension du bus continu - Contacteur avec bobine 24V 50 Hz - Préciser les types et calibres des protection 30
31 2. Compléter le document de paramétrage 2. Mise en œuvre d un convertisseur en U/f pour machine asynchrone avec automate programmable industriel. A partir du schéma de mise en œuvre proposé par le constructeur pour le FMV 2306 et des explications de fonctionnement (II.1.3) : 1. Donner les modifications à apporter au schéma de mise en œuvre du FMV 2306 pour une commande par automate programmable (complêter le schéma donné) : Entrées automate programmable Bp Marche Bp Arrêt Bp Marche impulsionnelle Bp Arrêt d Urgence Sorties automate programmable Logiques autant que nécessaire Analogique pour donner la consigne fréquence (les rampes sont gérées par l API) 2. Donner les GRAFCET correspondant à ce schéma de mise en œuvre : GRAFCET Marche Normale GRAFCET Marche Impulsionnelle GRAFCET Arrêt d Urgence 31
32 Schéma à complêter 32
33 Autocorrection 1. Mise en œuvre et programmation d un convertisseur en U/f pour machine asynchrone. 1. Donner le schéma de raccordement du variateur ci-dessous à partir du reseau 3 x 400V 50 Hz Q, F1 F2 230V KM 24V F3 Marche avant Atu API KA NC Défaut extérieur Effacement défaut Q Pré-coupure KM KA NC : Non Connecté MAS 33
34 2. Compléter le document de paramétrage 34
35 2. Mise en œuvre d un convertisseur en U/f pour machine asynchrone avec API. 1. schéma de mise en œuvre du FMV 2306 pour une commande par automate programmable 35
36 2. Donner les GRAFCET correspondant à ce schéma de mise en œuvre : GRAFCET Arrêt d Urgence 1 2 Arrêt d Urgence F/GFN (10) F/GFI (20) Arrêt d Urgence et Acquittement ATU GRAFCET Fonctionnement Normal (GFN) Marche Arrêt AVANT (15, 11) AVANT (15, 11) KM1 KM1 Rampe terminée MONTEE CONTROLEE DE LA CONSIGNE DE VITESSE ANALOGIQUE Rampe terminée DESCENTE CONTROLEE DE LA CONSIGNE DE VITESSE ANALOGIQUE Rampe terminée et fréquence < fréquence mini GRAFCET Fonctionnement Impulsionnel (GFI) Marche Impulsionnelle AVANT (15, 11) Marche Impulsionnelle AVANT (15, 11) KM1 KM1 Rampe terminée MONTEE CONTROLEE DE LA CONSIGNE DE VITESSE ANALOGIQUE Rampe terminée DESCENTE CONTROLEE DE LA CONSIGNE DE VITESSE ANALOGIQUE Rampe terminée et fréquence < fréquence mini 36
2 La technologie DTC ou le contrôle direct de couple Guide technique No. 1
 ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
ABB drives Guide technique No. 1 La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d écureuil 2 La technologie DTC ou le contrôle direct
INSTALLATIONS INDUSTRIELLES
 Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
Ministère de l Enseignement Supérieur et de la Recherche Scientifique Institut Supérieur des Etudes Technologiques de Nabeul Département : Génie Electrique Support de cours : INSTALLATIONS INDUSTRIELLES
Notions fondamentales sur le démarrage des moteurs
 Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Notions fondamentales sur le démarrage des moteurs Démarrage traditionnel Démarreur progressif, convertisseur de fréquence Motor Management TM Préface Ce manuel technique sur le démarrage des moteurs fait
Eléments constitutifs et synthèse des convertisseurs statiques. Convertisseur statique CVS. K à séquences convenables. Source d'entrée S1
 1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
1 Introduction Un convertisseur statique est un montage utilisant des interrupteurs à semiconducteurs permettant par une commande convenable de ces derniers de régler un transfert d énergie entre une source
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
Série 77 - Relais statiques modulaires 5A. Caractéristiques. Relais temporisés et relais de contrôle
 Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
Série 77 - Relais statiques modulaires 5A Caractéristiques 77.01.x.xxx.8050 77.01.x.xxx.8051 Relais statiques modulaires, Sortie 1NO 5A Largeur 17.5mm Sortie AC Isolation entre entrée et sortie 5kV (1.2/
PRODUCTION, CONVERSION OU DISTRIBUTION DE L ÉNERGIE ÉLECTRIQUE
 XXXX H02 PRODUCTION, CONVERSION OU DISTRIBUTION DE L ÉNERGIE ÉLECTRIQUE XXXX APPAREILS POUR LA TRANSFORMATION DE COURANT ALTERNATIF EN COURANT ALTERNATIF, DE COURANT ALTERNATIF EN COURANT CONTINU OU VICE
XXXX H02 PRODUCTION, CONVERSION OU DISTRIBUTION DE L ÉNERGIE ÉLECTRIQUE XXXX APPAREILS POUR LA TRANSFORMATION DE COURANT ALTERNATIF EN COURANT ALTERNATIF, DE COURANT ALTERNATIF EN COURANT CONTINU OU VICE
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
NPIH800 GENERATION & RESEAUX. PROTECTION de COURANT TERRE
 GENERATION & RESEAUX PROTECTION de COURANT TERRE NPIH800 assure la protection à maximum de courant terre des réseaux électriques de moyenne et haute tension. Ce relais multifonction surveille les défauts
GENERATION & RESEAUX PROTECTION de COURANT TERRE NPIH800 assure la protection à maximum de courant terre des réseaux électriques de moyenne et haute tension. Ce relais multifonction surveille les défauts
Gestion et entretien des Installations Electriques BT
 Durée : 5 jours Gestion et entretien des Installations Electriques BT Réf : (TECH.01) ² Connaître les paramètres d une installation basse tension, apprendre les bonnes méthodes de gestion et entretien
Durée : 5 jours Gestion et entretien des Installations Electriques BT Réf : (TECH.01) ² Connaître les paramètres d une installation basse tension, apprendre les bonnes méthodes de gestion et entretien
CIRCUIT DE CHARGE BOSCH
 LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
DimNet Gradateurs Numériques Evolués Compulite. CompuDim 2000
 DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
DimNet Gradateurs Numériques Evolués Compulite La gamme des gradateurs Compulite est conçue autour des technologies les plus récentes et les plus évoluées que ces 20 dernières années ont vu apparaître.
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
COMMANDER la puissance par MODULATION COMMUNIQUER
 SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
SERIE 4 MODULER - COMMUNIQUER Fonctions du programme abordées : COMMANDER la puissance par MODULATION COMMUNIQUER Objectifs : Réaliser le câblage d un modulateur d après le schéma de puissance et de commande,
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Le triac en commutation : Commande des relais statiques : Princ ipe électronique
 LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P
 Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
Relais statiques SOLITRON MIDI, Commutation analogique, Multi Fonctions RJ1P Relais statique CA Multi fonctions - 5 sélections de modes de fonctionnement: angle de phase, trains d ondes distribuées et
Convertisseurs statiques d'énergie électrique
 Convertisseurs statiques d'énergie électrique I. Pourquoi des convertisseurs d'énergie électrique? L'énergie électrique utilisée dans l'industrie et chez les particuliers provient principalement du réseau
Convertisseurs statiques d'énergie électrique I. Pourquoi des convertisseurs d'énergie électrique? L'énergie électrique utilisée dans l'industrie et chez les particuliers provient principalement du réseau
Machine à courant continu
 Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
Machine à courant continu Technologie, choix et alimentation des machines à courant continu Objectif Choisir un ensemble moto-variateur à courant continu à partir d un cahier des charges. Pré-requis Mécanique
Solutions pour la mesure. de courant et d énergie
 Solutions pour la mesure de courant et d énergie Mesure et analyse de signal Solutions WAGO pour la surveillance et l économie d énergie Boucles de mesure Rogowski, série 855 pour la mesure non intrusive
Solutions pour la mesure de courant et d énergie Mesure et analyse de signal Solutions WAGO pour la surveillance et l économie d énergie Boucles de mesure Rogowski, série 855 pour la mesure non intrusive
VMT Mod : Ventilation modulée pour le tertiaire
 Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Notice de Montage VMT Mod : Ventilation modulée pour le tertiaire VC 100876 - D920_a - RCS 956 506 828 - Imprimé en France/Printed in France VMT Mod est un système de ventilation intelligent à destination
Multitension Monofonction. Multitension Multifonction
 Série - Relais temporisés modulaires 16 A SERIE Caractéristiques.01.11 Relais temporisés multifonction et monofonction.01 - Multifonction et multitension.11 - Temporisé à la mise sous tension, multitension
Série - Relais temporisés modulaires 16 A SERIE Caractéristiques.01.11 Relais temporisés multifonction et monofonction.01 - Multifonction et multitension.11 - Temporisé à la mise sous tension, multitension
Acquisition et conditionnement de l information Les capteurs
 Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Acquisition et conditionnement de l information Les capteurs COURS 1. Exemple d une chaîne d acquisition d une information L'acquisition de la grandeur physique est réalisée par un capteur qui traduit
Série HarmonicGuard Application Omnibus Filtre Harmonique Actif. Démarrage Rapide Configuration du Logiciel de l unité
 Série HarmonicGuard Application Omnibus Filtre Harmonique Actif Démarrage Rapide Configuration du Logiciel de l unité TCI, LLC W132 N10611 Grant Drive Germantown, Wisconsin 53022 Téléphone: 414-357-4480
Série HarmonicGuard Application Omnibus Filtre Harmonique Actif Démarrage Rapide Configuration du Logiciel de l unité TCI, LLC W132 N10611 Grant Drive Germantown, Wisconsin 53022 Téléphone: 414-357-4480
LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES ETUDE D UN TRAITEMENT DE SURFACE
 TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
TP. TET LYCEE TECHNIQUE PIERRE EMILE MARTIN - 18 026 BOURGES GENIE ELECTROTECHNIQUE Durée : 3 heures Tp relais statique 10-11 RELAIS STATIQUE S.T.I. Pré-requis : Laboratoire des systèmes Cours sur les
RÉFÉRENTIEL TECHNIQUE
 SYSTÈMES ÉNERGÉTIQUES INSULAIRES RÉFÉRENTIEL TECHNIQUE CONTRÔLES DES PERFORMANCES AVANT LA MISE EN EXPLOITATION DEFINITIVE DES INSTALLATIONS DE PRODUCTION D ÉNERGIE ÉLECTRIQUE RACCORDÉES EN HTB DANS LES
SYSTÈMES ÉNERGÉTIQUES INSULAIRES RÉFÉRENTIEL TECHNIQUE CONTRÔLES DES PERFORMANCES AVANT LA MISE EN EXPLOITATION DEFINITIVE DES INSTALLATIONS DE PRODUCTION D ÉNERGIE ÉLECTRIQUE RACCORDÉES EN HTB DANS LES
Fiche technique Schneider
 Fiche technique Schneider Test et mise en service rapide des variateurs ATV11 Gamme : ATV11 Introduction Comment mettre en œuvre le variateur ATV11 pour des applications simples. Comment tester rapidement
Fiche technique Schneider Test et mise en service rapide des variateurs ATV11 Gamme : ATV11 Introduction Comment mettre en œuvre le variateur ATV11 pour des applications simples. Comment tester rapidement
Variation de vitesse des machines à courant alternatif. par
 Variation de vitesse des machines à courant alternatif. par Philippe Ladoux Variation de vitesse des machines à courant alternatif. Introduction. Sommaire A : Principe de fonctionnement des machines à
Variation de vitesse des machines à courant alternatif. par Philippe Ladoux Variation de vitesse des machines à courant alternatif. Introduction. Sommaire A : Principe de fonctionnement des machines à
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension
 Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension Cyril BUTTAY CEGELY VALEO 30 novembre 2004 Cyril BUTTAY Contribution à la conception
Contribution à la conception par la simulation en électronique de puissance : application à l onduleur basse tension Cyril BUTTAY CEGELY VALEO 30 novembre 2004 Cyril BUTTAY Contribution à la conception
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE SÉRIE 8036
 A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
A Électrotechnique SYSTÈME DIDACTIQUE DE COMMANDE INDUSTRIELLE Système didactique de commande industrielle, série 8036. DESCRIPTION GÉNÉRALE Le Système didactique de commande industrielle, série 8036,
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
NO-BREAK KS. Système UPS dynamique PRÉSENTATION
 NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
NO-BREAK KS Système UPS dynamique PRÉSENTATION Table des matières Chapitre 1 : Description du système No-Break KS...3 Chapitre 2 : Fonctionnement lorsque le réseau est présent...4 Chapitre 3 : Fonctionnement
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Cahier technique n 207
 Collection Technique... Cahier technique n 207 Les moteurs électriques pour mieux les piloter et les protéger E. Gaucheron Building a New Electric World * Les Cahiers Techniques constituent une collection
Collection Technique... Cahier technique n 207 Les moteurs électriques pour mieux les piloter et les protéger E. Gaucheron Building a New Electric World * Les Cahiers Techniques constituent une collection
Système de contrôle TS 970
 Système de contrôle TS 970 Le système de contrôle TS 970 est fourni de manière standard. Ce système de contrôle est préparé à accueillir différents éléments de commande. Spécifications techniques du système
Système de contrôle TS 970 Le système de contrôle TS 970 est fourni de manière standard. Ce système de contrôle est préparé à accueillir différents éléments de commande. Spécifications techniques du système
Modules d automatismes simples
 Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Modules d automatismes simples Solutions pour automatiser Modules d'automatismes Enfin, vraiment simple! Un concentré de solution Pour vos petites applications d'automatismes millenium gère : Temporisations
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Relais de surveillance et relais temporisés. Surveillance efficace des installations
 Relais de surveillance et relais temporisés Surveillance efficace des installations Relais de surveillance et relais temporisés surveillance efficace des installations Pour une disponibilité élevée Les
Relais de surveillance et relais temporisés Surveillance efficace des installations Relais de surveillance et relais temporisés surveillance efficace des installations Pour une disponibilité élevée Les
Introduction à l électronique de puissance Synthèse des convertisseurs statiques. Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER
 Introduction à l électronique de puissance Synthèse des convertisseurs statiques Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER 28 janvier 2007 Table des matières 1 Synthèse des convertisseurs
Introduction à l électronique de puissance Synthèse des convertisseurs statiques Lycée Richelieu TSI 1 Année scolaire 2006-2007 Sébastien GERGADIER 28 janvier 2007 Table des matières 1 Synthèse des convertisseurs
INSTALLATIONS ÉLECTRIQUES CIVILES
 index ALIMENTATION MONOPHASEE ALIMENTATION MONOPHASEE ALIMENTATIONS DL 2101ALA DL 2101ALF MODULES INTERRUPTEURS ET COMMUTATEURS DL 2101T02RM INTERRUPTEUR INTERMEDIAIRE DL 2101T04 COMMUTATEUR INTERMEDIAIRE
index ALIMENTATION MONOPHASEE ALIMENTATION MONOPHASEE ALIMENTATIONS DL 2101ALA DL 2101ALF MODULES INTERRUPTEURS ET COMMUTATEURS DL 2101T02RM INTERRUPTEUR INTERMEDIAIRE DL 2101T04 COMMUTATEUR INTERMEDIAIRE
Neu. Technique d installation / de surveillance. VARIMETER RCM Contrôleur différentiel type B IP 5883
 Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
Technique d installation / de surveillance VARIMETER RCM Contrôleur différentiel type IP 5883 0249636 X1 A1 X1 i2 11 Alarm 12 Neu IP 5583 N 5018/035 N 5018/030 escription du produit Le contrôleur différentiel
Moteurs pas à pas Michel ABIGNOLI Clément GOELDEL Principe des moteurs pas à pas Structures et modèles de description Alimentation Commande
 Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Moteurs pas à pas par Michel ABIGNOLI Professeur d Université à l ENSEM (École Nationale Supérieure d Électricité et de Mécanique de Nancy) et Clément GOELDEL Professeur d Université à la Faculté des Sciences
Adaptabilité et flexibilité d une station de charge pour véhicules électriques
 Adaptabilité et flexibilité d une station de charge pour véhicules électriques Mars 2012 / Livre blanc de Johan Mossberg et Maeva Kuhlich Sommaire Introduction... p 2 Qu est ce qu une station de charge
Adaptabilité et flexibilité d une station de charge pour véhicules électriques Mars 2012 / Livre blanc de Johan Mossberg et Maeva Kuhlich Sommaire Introduction... p 2 Qu est ce qu une station de charge
Triphasé 400 V 0.4-630 kw. Variateur multifonction haute performance
 Triphasé 400 V 0.4-630 kw Variateur multifonction haute performance Des performances à la pointe de l industrie The performance reaching the peak in the industry En rassemblant le meilleur de ces technologies,
Triphasé 400 V 0.4-630 kw Variateur multifonction haute performance Des performances à la pointe de l industrie The performance reaching the peak in the industry En rassemblant le meilleur de ces technologies,
MAGTROL. Frein à courant de Foucault haute vitesse WB 23. WB 23 Fiche Technique CARACTÉRISTIQUES COMMANDE PAR PC DESCRIPTION
 Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Fiche Technique Frein à courant de Foucault haute vitesse CARACTÉRISTIQUES nominal : 80 mnm Vitesse de rotation élevée 100 000 tmin -1 de freinage : 120 W en permanence et 400 W en intermittence Faible
Découvrir le. Discover. Lighting Technologies
 Découvrir le Discover Lighting Technologies Présentation du nouveau standard Eurodim Twin Tech ADB, une nouvelle génération d installations professionnelles de gradation qui réunit le meilleur de deux
Découvrir le Discover Lighting Technologies Présentation du nouveau standard Eurodim Twin Tech ADB, une nouvelle génération d installations professionnelles de gradation qui réunit le meilleur de deux
Fiche technique variateur
 Fiche technique variateur Test et mise en service rapide des variateurs ATV600 avec le HMI intégré et WebServer Gamme : ATV600 Introduction Comment mettre en œuvre les variateurs Schneider pour des applications
Fiche technique variateur Test et mise en service rapide des variateurs ATV600 avec le HMI intégré et WebServer Gamme : ATV600 Introduction Comment mettre en œuvre les variateurs Schneider pour des applications
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Les résistances de point neutre
 Les résistances de point neutre Lorsque l on souhaite limiter fortement le courant dans le neutre du réseau, on utilise une résistance de point neutre. Les risques de résonance parallèle ou série sont
Les résistances de point neutre Lorsque l on souhaite limiter fortement le courant dans le neutre du réseau, on utilise une résistance de point neutre. Les risques de résonance parallèle ou série sont
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION
 LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION LES CARACTERISTIQUES DES SUPPORTS DE TRANSMISSION ) Caractéristiques techniques des supports. L infrastructure d un réseau, la qualité de service offerte,
Twincat PLC Temperature Controller. Régulation de Température à l aide de TwinCAT PLC.
 Twincat PLC Temperature Controller Régulation de Température à l aide de TwinCAT PLC. VERSION : 1.0 / JYL DATE : 28 Novembre 2005 1 Installation...4 2 Présentation :...4 3 Schéma fonctionnel :...5 4 Générateur
Twincat PLC Temperature Controller Régulation de Température à l aide de TwinCAT PLC. VERSION : 1.0 / JYL DATE : 28 Novembre 2005 1 Installation...4 2 Présentation :...4 3 Schéma fonctionnel :...5 4 Générateur
Centrale d alarme DA996
 Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
MAGNA3 BIEN PLUS QU UN CIRCULATEUR
 MAGNA3 BIEN PLUS QU UN CIRCULATEUR Gamme complète de circulateurs intelligents à haut rendement énergétique pour les installations de chauffage/climatisation, les systèmes géothermiques et les applications
MAGNA3 BIEN PLUS QU UN CIRCULATEUR Gamme complète de circulateurs intelligents à haut rendement énergétique pour les installations de chauffage/climatisation, les systèmes géothermiques et les applications
MODULE DIN RELAIS TECHNICAL SPECIFICATIONS RM1-230. Basse tension : Voltage : Nominal 12 Vdc, Maximum 14 Vdc
 RM1 Notice Technique DESCRIPTION MODULE DIN RELAIS Le module RM1 de la famille DIN permet de contrôler des charges diverses en les plaçant sous/hors tension. Il peut être contrôlé localement par un interrupteur
RM1 Notice Technique DESCRIPTION MODULE DIN RELAIS Le module RM1 de la famille DIN permet de contrôler des charges diverses en les plaçant sous/hors tension. Il peut être contrôlé localement par un interrupteur
Références pour la commande
 avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
avec fonction de détection de défaillance G3PC Détecte les dysfonctionnements des relais statiques utilisés pour la régulation de température des éléments chauffants et émet simultanément des signaux d'alarme.
CONCOURS GÉNÉRAL DES LYCÉES Session 2014. Durée 5 heures. Corrigé. Poséidon au secours d Éole pour produire l énergie électrique
 CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
CONCOURS GÉNÉRAL DES LYCÉES Session 2014 Durée 5 heures Corrigé Poséidon au secours d Éole pour produire l énergie électrique Partie 1 - analyse du besoin Q 1. À l aide du diagramme FAST du document technique
DOCUMENT RESSOURCE SONDES PRESENTATION
 Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
Documentation technique DOCUMENT RESSOURCE SONDES PRESENTATION SEP du LPo N-J Cugnot 93 Neuilly/Marne LE CALCULATEUR Il est placé dans le boîtier à calculateurs, sur le passage de roue avant droit. Les
SYSTEMES DE TRANSFERT STATIQUE: CEI 62310, UNE NOUVELLE NORME POUR GARANTIR LES PERFORMANCES ET LA SÉCURITÉ
 White Paper 10 2010 SYSTEMES DE TRANSFERT STATIQUE: CEI 62310, UNE NOUVELLE NORME POUR GARANTIR LES PERFORMANCES ET LA SÉCURITÉ MATTEO GRANZIERO, Responsabile comunicazione tecnica, SOCOMEC UPS Avant l
White Paper 10 2010 SYSTEMES DE TRANSFERT STATIQUE: CEI 62310, UNE NOUVELLE NORME POUR GARANTIR LES PERFORMANCES ET LA SÉCURITÉ MATTEO GRANZIERO, Responsabile comunicazione tecnica, SOCOMEC UPS Avant l
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
EL70x1 en mode position. Mise en œuvre rapide. VERSION : Beta / DATE : 31 Juillet 2011
 - EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
- EL70x1 en mode position Mise en œuvre rapide VERSION : Beta / DATE : 31 Juillet 2011 Les bornes EL70x1 permettent de contrôler des moteurs pas à pas. Soit la consigne est générée par une tâche NC, soit
Cahier technique n 196
 Collection Technique... Cahier technique n 196 Génération électrique intégrée aux sites industriels et bâtiments commerciaux T. Hazel Les Cahiers Techniques constituent une collection d une centaine de
Collection Technique... Cahier technique n 196 Génération électrique intégrée aux sites industriels et bâtiments commerciaux T. Hazel Les Cahiers Techniques constituent une collection d une centaine de
Module Relais de temporisation DC 24 110 V, programmable
 Caractéristiques techniques indicatives sous réserve de modifications 815006.00 Identification Type ZR6-5006.00 Version du produit Version du fiche technique 00 Application/ Domaine d'utilisation/caractéristiques
Caractéristiques techniques indicatives sous réserve de modifications 815006.00 Identification Type ZR6-5006.00 Version du produit Version du fiche technique 00 Application/ Domaine d'utilisation/caractéristiques
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
AMELIORATION DE LA FIABILITE D UN MOTEUR GRÂCE AU TEST STATIQUE ET DYNAMIQUE
 AMELIORATION DE LA FIABILITE D UN MOTEUR GRÂCE AU TEST STATIQUE ET DYNAMIQUE Le test statique est un moyen très connu pour évaluer les moteurs électriques. Cependant, si un moteur ne peut pas être arreté,
AMELIORATION DE LA FIABILITE D UN MOTEUR GRÂCE AU TEST STATIQUE ET DYNAMIQUE Le test statique est un moyen très connu pour évaluer les moteurs électriques. Cependant, si un moteur ne peut pas être arreté,
n 159 onduleurs et harmoniques (cas des charges non linéaires) photographie Jean Noël Fiorina
 photographie Jean Noël Fiorina") n 159 photographie onduleurs et harmoniques (cas des charges non linéaires) Jean Noël Fiorina Entré chez Merlin Gerin en 1968 comme agent technique de laboratoire au département ACS - Alimentations Convertisseurs
n 159 photographie onduleurs et harmoniques (cas des charges non linéaires) Jean Noël Fiorina Entré chez Merlin Gerin en 1968 comme agent technique de laboratoire au département ACS - Alimentations Convertisseurs
Guide de la compensation d énergie réactive et du filtrage des harmoniques
 Guides experts basse tension N 6 Guide de la compensation d énergie réactive et du filtrage des harmoniques 051797 M M M M M M M M M M M M Sommaire 1. Généralités sur la compensation d énergie réactive...3
Guides experts basse tension N 6 Guide de la compensation d énergie réactive et du filtrage des harmoniques 051797 M M M M M M M M M M M M Sommaire 1. Généralités sur la compensation d énergie réactive...3
Fiche technique. 1) Pour faire tourner le moteur en avant ou en arrière (deux straps)... 2
 Pour faire tourner le moteur en avant ou en arrière (deux straps)... 2") Fiche technique Test et mise en service rapide des variateurs ATV12 Gamme : ATV12 Introduction Comment mettre en œuvre le variateur ATV12 pour des applications simples. Comment tester rapidement ce variateur.
Fiche technique Test et mise en service rapide des variateurs ATV12 Gamme : ATV12 Introduction Comment mettre en œuvre le variateur ATV12 pour des applications simples. Comment tester rapidement ce variateur.
La solution éco performante pour la sécurisation de l alimentation électrique des Datacenters à haut niveau de disponibilité
 La solution éco performante pour la sécurisation de l alimentation électrique des Datacenters à haut niveau de disponibilité Alimentation Sans Interruption en liaison avec : Les échanges et besoins en
La solution éco performante pour la sécurisation de l alimentation électrique des Datacenters à haut niveau de disponibilité Alimentation Sans Interruption en liaison avec : Les échanges et besoins en
Kits de solutions conformes aux normes pour station de recharge
 Kits de solutions conformes aux normes pour station de recharge s, interrupteurs, appareils de mesure et de surveillance Les garages et les parkings doivent être dotés de stations de recharge (EVSE) pour
Kits de solutions conformes aux normes pour station de recharge s, interrupteurs, appareils de mesure et de surveillance Les garages et les parkings doivent être dotés de stations de recharge (EVSE) pour
Transmission de données. A) Principaux éléments intervenant dans la transmission
 Principaux éléments intervenant dans la transmission") Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Page 1 / 7 A) Principaux éléments intervenant dans la transmission A.1 Equipement voisins Ordinateur ou terminal Ordinateur ou terminal Canal de transmission ETTD ETTD ETTD : Equipement Terminal de Traitement
Relais statiques SOLITRON, 1 ou 2 pôles Avec dissipateur intégré
 Relais statiques SOLITRON, 1 ou 2 pôles Avec dissipateur intégré Relais statique CA, 1 ou 2 pôles Commutation au zéro de tension pour applications de chauffage et de moteur (RN1A) Commutation instantanée
Relais statiques SOLITRON, 1 ou 2 pôles Avec dissipateur intégré Relais statique CA, 1 ou 2 pôles Commutation au zéro de tension pour applications de chauffage et de moteur (RN1A) Commutation instantanée
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
Formations spécifiques
 Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
MODULES ÉLECTRIQUES. - systèmes électriques DC - onduleurs - convertisseurs - interrupteurs statiques. Notre alimentation Votre confiance
 MODULES ÉLECTRIQUES - systèmes électriques DC - onduleurs - convertisseurs - interrupteurs statiques Notre alimentation Votre confiance Système Power 1UDC+ Jusqu à 38 redresseurs et un contrôleur, 1266A
MODULES ÉLECTRIQUES - systèmes électriques DC - onduleurs - convertisseurs - interrupteurs statiques Notre alimentation Votre confiance Système Power 1UDC+ Jusqu à 38 redresseurs et un contrôleur, 1266A
CASSY -Display (524 020)
") 09/99-5-Hund Mode d emploi CASSY -Display () 7 A a b 1 B a b 8 2 3 STOP INTER. 7 1 AffichageA affichage de la valeur mesurée (1a), affichage de l unité (1b) 2 AffichageB affichage de la valeur mesurée
09/99-5-Hund Mode d emploi CASSY -Display () 7 A a b 1 B a b 8 2 3 STOP INTER. 7 1 AffichageA affichage de la valeur mesurée (1a), affichage de l unité (1b) 2 AffichageB affichage de la valeur mesurée
0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.8 U N /0.5 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N 0.2 U N /0.1 U N
 Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Série 55 - Relais industriels 7-10 A Caractéristiques 55.12 55.13 55.14 Relais pour usage général avec 2, 3 ou 4 contacts Montage sur circuit imprimé 55.12-2 contacts 10 A 55.13-3 contacts 10 A 55.14-4
Élan d ouverture. 30 fois plus rapide qu un battement de cil : ABB simule l extrême dans un disjoncteur CCHT
 30 fois plus rapide qu un battement de cil : ABB simule l extrême dans un disjoncteur CCHT Daniel Ohlsson, Jakub Korbel, Per Lindholm, Ueli Steiger, Per Skarby, Christian Simonidis, Sami Kotilainen L une
30 fois plus rapide qu un battement de cil : ABB simule l extrême dans un disjoncteur CCHT Daniel Ohlsson, Jakub Korbel, Per Lindholm, Ueli Steiger, Per Skarby, Christian Simonidis, Sami Kotilainen L une
III Capteurs et actuateurs
 III Capteurs et actuateurs Tous les systèmes électroniques ont en commun qu ils fonctionnent selon le principe ETS (Entrée, Traitement, Sortie) du traitement de l information. ENTRÉE TRAITEMENT SORTIE
III Capteurs et actuateurs Tous les systèmes électroniques ont en commun qu ils fonctionnent selon le principe ETS (Entrée, Traitement, Sortie) du traitement de l information. ENTRÉE TRAITEMENT SORTIE
MANUEL D UTILISATION EASY 12
 MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
MANUEL D UTILISATION EASY 12 NUMERIQUE RVE TECHNOLOGIE Siège social : Rue Gutenberg. Z.I. Les Carreaux. B.P. 19. 77440 Lizy-sur-Ourcq. France Tel : +33 (0)1 60 61 53 00, Fax : +33 (0)1 60 01 19 10, E-mail
L'intégration et le montage d'appareillages électriques doivent être réservés à des électriciens
 Automate d'éclairage de cage d'escaliers rail DIN N de commande : 0821 00 Module à impulsion N de commande : 0336 00 Manuel d utilisation 1 Consignes de sécurité L'intégration et le montage d'appareillages
Automate d'éclairage de cage d'escaliers rail DIN N de commande : 0821 00 Module à impulsion N de commande : 0336 00 Manuel d utilisation 1 Consignes de sécurité L'intégration et le montage d'appareillages
Capteur mécanique universel HF 32/2/B
 Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
Capteur mécanique universel HF 32/2/B Instructions matériel conforme aux directives CE d emploi et d entretien MS 32/2/B R 3/3 CONSIGNES PRIORITAIRES 2 INSTALLATION DU CAPTEUR HF 32 3 4-5 INSTALLATION
APPENDICE B SYSTÈME DE PESAGE INTELLIGENT MODÈLE ILC3 ET LM3D VERSION 1.7
 APPENDICE B SYSTÈME DE PESAGE INTELLIGENT MODÈLE ILC3 ET LM3D VERSION 1.7 TABLE DES MATIÈRES 1. PROGRAMMATION RAPIDE :... B-1 2. PRÉSENTATION :... B-3 3. CARACTÉRISTIQUES :... B-3 3.1. ILC3... B-3 3.2.
APPENDICE B SYSTÈME DE PESAGE INTELLIGENT MODÈLE ILC3 ET LM3D VERSION 1.7 TABLE DES MATIÈRES 1. PROGRAMMATION RAPIDE :... B-1 2. PRÉSENTATION :... B-3 3. CARACTÉRISTIQUES :... B-3 3.1. ILC3... B-3 3.2.
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIQUE : ÉLÉMENTS DE CORRIGÉ. Partie A : alimentation HTA
 ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
ÉTUDE D UN SYSTÈME ET/OU D UN PROCESSUS INDUSTRIEL OU TECHNIUE : ÉLÉMENTS DE CORRIGÉ A1-Étude de l alimentation EDF Partie A : alimentation HTA A1-1 Comment dénomme t-on l alimentation HTA d EDF? Donner
UE 503 L3 MIAGE. Initiation Réseau et Programmation Web La couche physique. A. Belaïd
 UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
UE 503 L3 MIAGE Initiation Réseau et Programmation Web La couche physique A. Belaïd [email protected] http://www.loria.fr/~abelaid/ Année Universitaire 2011/2012 2 Le Modèle OSI La couche physique ou le
Convertisseurs Statiques & Machines
 MASTER EEA Parcours CESE Travaux Pratiques Convertisseurs Statiques & Machines EM7ECEBM V. BLEY D. RISALETTO D. MALEC J.P. CAMBRONNE B. JAMMES 0-0 TABLE DES MATIERES Rotation des TP Binôme Séance Séance
MASTER EEA Parcours CESE Travaux Pratiques Convertisseurs Statiques & Machines EM7ECEBM V. BLEY D. RISALETTO D. MALEC J.P. CAMBRONNE B. JAMMES 0-0 TABLE DES MATIERES Rotation des TP Binôme Séance Séance
Version MOVITRANS 04/2004. Description 1121 3027 / FR
 MOVITRANS Version 04/2004 Description 1121 3027 / FR SEW-USOCOME 1 Introduction... 4 1.1 Qu est-ce-que le MOVITRANS?... 4 1.2 Domaines d utilisation du MOVITRANS... 4 1.3 Principe de fonctionnement...
MOVITRANS Version 04/2004 Description 1121 3027 / FR SEW-USOCOME 1 Introduction... 4 1.1 Qu est-ce-que le MOVITRANS?... 4 1.2 Domaines d utilisation du MOVITRANS... 4 1.3 Principe de fonctionnement...
La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS
 Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Gestion moteur véhicules légers
 Module 8 Gestion moteur véhicules légers Orientation véhicules légers Diagnosticien d'automobiles avec brevet fédéral Orientation véhicules utilitaires Modules 7 à 9 Modules 10 à12 Modules 1 à 6 UPSA,
Module 8 Gestion moteur véhicules légers Orientation véhicules légers Diagnosticien d'automobiles avec brevet fédéral Orientation véhicules utilitaires Modules 7 à 9 Modules 10 à12 Modules 1 à 6 UPSA,
12 applications pour maîtriser le PICBASIC PB-3B - Gérard GUIHÉNEUF. Elektor-Publitronic ISBN : 978 2 86661 166 8
 Sommaire Avant-propos 1. Présentation du module PICBASIC PB-3B 1.1 La gamme PICBASIC fabriquée par Comfile Technology..................... 3 1.2 Principe commun de programmation......................................
Sommaire Avant-propos 1. Présentation du module PICBASIC PB-3B 1.1 La gamme PICBASIC fabriquée par Comfile Technology..................... 3 1.2 Principe commun de programmation......................................
Interrupteurs Différentiels 2P jusqu à 40 A
 87045 LIMOGES Cedex Téléphone 05 55 0 87 87 Télécopie 05 55 0 88 88 Interrupteurs Différentiels DX³-ID 411 10,, 11 11,, 13, 14, 1, 17, 23, 31 411 32 32,, 34 34,, 35 35,, 37 37,, 38 38,, 44 SOMMAIRE PAGES
87045 LIMOGES Cedex Téléphone 05 55 0 87 87 Télécopie 05 55 0 88 88 Interrupteurs Différentiels DX³-ID 411 10,, 11 11,, 13, 14, 1, 17, 23, 31 411 32 32,, 34 34,, 35 35,, 37 37,, 38 38,, 44 SOMMAIRE PAGES
DÉPANNAGE SUR PLACE D UN MOTEUR À COURANT CONTINU
 DÉPANNAGE SUR PLACE D UN MOTEUR À COURANT CONTINU Par Preben Christiansen, EASA Ingénieur Conseil (retraité) Il s'avère parfois difficile d effectuer un dépannage de moteurs à courant continu sur place,
DÉPANNAGE SUR PLACE D UN MOTEUR À COURANT CONTINU Par Preben Christiansen, EASA Ingénieur Conseil (retraité) Il s'avère parfois difficile d effectuer un dépannage de moteurs à courant continu sur place,
T500 DUAlTACH. JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence TACHYMETRE 2 CANAUX
 02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
02-09 T500 DUAlTACH JAQUET T500 DualTach Instrument de mesure et de surveillance équipé de 2 entrées fréquence JAQUET T500 DualTach Instrument multi canal de mesure et de surveillance pour applications
La compensation de l énergie réactive
 S N 16 - Novembre 2006 p.1 Présentation p.2 L énergie réactive : définitions et rappels essentiels p.4 La compensation de l énergie réactive p.5 L approche fonctionnelle p.6 La problématique de l énergie
S N 16 - Novembre 2006 p.1 Présentation p.2 L énergie réactive : définitions et rappels essentiels p.4 La compensation de l énergie réactive p.5 L approche fonctionnelle p.6 La problématique de l énergie