PPE terminale S SI Année TRAUBE Lucille BAERT Sébastien CASABIANCA Romain GRACIO Alexis. Lycée Jean Perrin
|
|
|
- Bernadette Sylvain
- il y a 8 ans
- Total affichages :
Transcription

1 PPE terminale S SI Année TRAUBE Lucille BAERT Sébastien CASABIANCA Romain GRACIO Alexis Lycée Jean Perrin

2 Table des matières I. INTRODUCTION :... 3 II. La conception... 4 A. Etude fonctionnelle Le diagramme bête à corne Le diagramme SADT Le diagramme pieuvre Le diagramme FAST B. Solutions techniques Solutions techniques du socle Solutions techniques pour la fixation de la pomme III. Réalisation de la partie mécanique A. Modélisation de la solution sous solidworks (version 2011) Vue d ensemble de l appareil Schéma Cinématique Support de la liaisons hélicoïdale Vis et système de préhension de la pomme Guidage en translation (liaison glissière) Chariot porte moto réducteur+ Moteur + accouplement Ossature de l appareil et un des tiroirs Photos lors de la réalisation B. Choix des produits utilisés Choix du moto réducteur Choix des capteurs Choix du bouton poussoir IV. Réalisation de la partie commande A. Présentation de la partie programmation Schéma de principe Choix des alimentations Schéma électrique du câblage Grafcet de l automate Grafcet en langage FBP V. CONCLUSION : VI. Annexes... 27
... 12 6. Chariot porte moto réducteur+ Moteur + accouplement... 13 7.")
3 I. INTRODUCTION : Le but de notre PPE est d étudier et de concevoir un «Epluche Pomme» qui pourra par la suite être installé dans le réfectoire de notre lycée. Il permettra ainsi de fournir des pommes aux élèves lors des pauses. Pour réaliser notre projet, un cahier des charges fonctionnel nous a été imposé et un budget d environ 100 nous a été alloué. Les principales caractéristiques imposées par le cahier des charges sont : Il doit s adapter à tout type de calibre de pomme Il doit garantir la sécurité des utilisateurs Etre alimenté en 12V /24V Un temps de cycle de 15s

4 II. La conception A. Etude fonctionnelle. 1. Le diagramme bête à corne. A qui rend t'il service? Sur quoi agit-il? UTILISATEUR POMME EPLUCHE-POMME Dans quel but? EPLUCHER UNE POMME Notre «Epluche Pomme» met en contact le consommateur et une pomme. Sa fonction principale est d enlever la peau de la pomme de façon automatique pour fournir une pomme épluchée au consommateur.


5 2. Le diagramme SADT. Le diagramme SADT nous a permis d identifier et de modéliser la fonction globale et les différents échanges entre le système et son environnement. Les entrées sont : Une pomme non épluchée Les données de contrôle sont : En sortie : L alimentation Les réglages et les contrôles des déplacements Partie Commande Les épluchures La pomme épluchée Pertes énergétiques

6 3. Le diagramme pieuvre. Le diagramme pieuvre est une représentation permettant de mettre en évidence et de recenser les différentes interactions entre le système et son environnement. SECURITE VOLUME FC6 FC5 FC4 ENERGIE UTILISATEUR FC7 EPLUCHE-POMME FC3 SUPPORT FP1 POMME FC1 FC2 LOIS ET NORMES FP1 FC1 FC2 FC3 FC4 FC5 Permettre à l'utilisateur d'éplucher une pomme sans intervenir pendant l'opération automatisée qui dure au maximum 15 secondes. S'adapter à tous types de pommes. Être conforme aux lois et aux normes. S'adapter à un support plan. S'adapter aux secteurs EDF. L'utilisateur ne doit encourir aucun risque. FC6 Transportable ( Pas trop volumineux ). FC7 Ne pas avoir à un intervenir durant le processus.

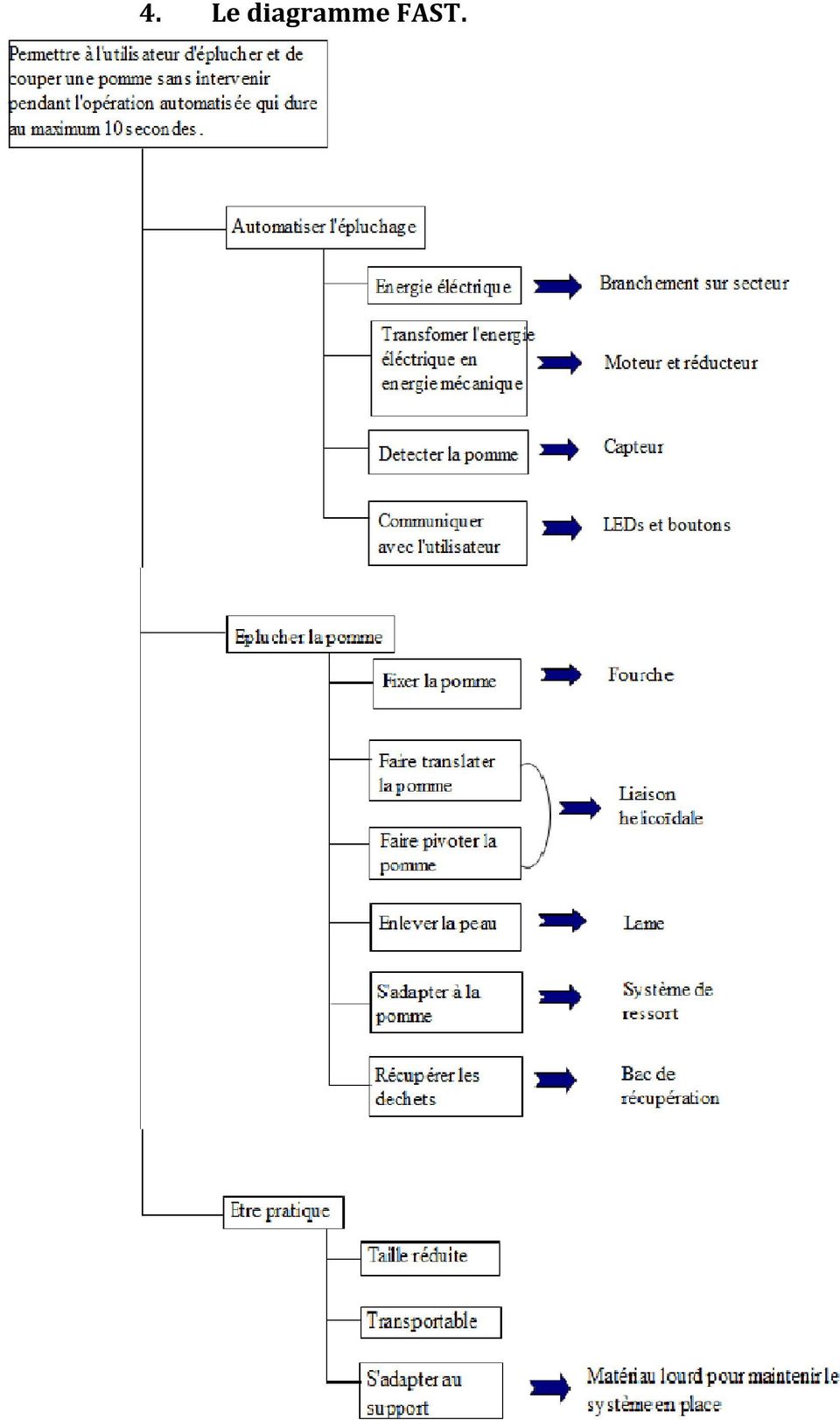
7 4. Le diagramme FAST.
8 B. Solutions techniques. Dans cette partie, nous décrivons les différentes solutions qui permettent de réaliser la fonction principale «Eplucher une pomme». 1. Solutions techniques du socle. La première solution consiste à utiliser le principe de ventouse par aspiration d'air avec une simple action sur un levier. Le problème de cette solution était la complexité et l'encombrement de ce système qui de surcroît n'est pas toujours efficace. La seconde solution consiste à utiliser un système d'étau à maintenir sur le support. Cette solution était beaucoup trop encombrante et nécessitait un support solide. La troisième solution proposée permettait de fixer l'ensemble sur le support par le moyen de vis. L'inconvénient de cette solution est qu'elle nécessite de faire des trous pour les vis dans le support, or dans une cuisine, ce n'est pas souhaitable. La dernière solution consistait à réaliser un ensemble lourd avec une boite, et par amélioration, des tiroirs pour récupérer les épluchures. C'est donc cette solution que nous avons choisi pour notre système.

9 2. Solutions techniques pour la fixation de la pomme. Nous avons d'abord réfléchi à différentes possibilités pour maintenir la pomme en place lors de l'épluchage. Après réflexion, il s'est avéré que seul le système de fourches avec «3 cônes» permettait de bien maintenir le fruit. En effet, les autres systèmes se fixent bien dans la pomme, mais dès qu'un effort trop grand est appliqué pour faire tourner la pomme et l'éplucher, alors la pomme tourne sur la fourche.

10 III. Réalisation de la partie mécanique. A. Modélisation de la solution sous solidworks (version 2011). Avant de passer à la réalisation de notre projet, nous avons modélisé la solution choisie. Pour cela, nous avons utilisé le logiciel solidworks 2011 qui nous a permis d avoir une image concrète du système et de définir toutes les cotes des pièces mécaniques. 1. Vue d ensemble de l appareil. L appareil se caractérise par trois zones distinctes : La zone supérieure dans laquelle se situe tout le mécanisme de l appareil La zone inférieure de gauche comportant un tiroir recevant toutes les épluchures. La zone inférieure de droite comportant un autre tiroir dans lequel seront stockées les pommes avant leur transformation. (Pour des raisons pratiques, ce tiroir a été supprimé de notre projet. Seul le tiroir des épluchures a été mis en œuvre)

11 2. Schéma Cinématique 3. Support de la liaisons hélicoïdale Cet élément sera fixé sur l ossature principale de l appareil.

12 4. Vis et système de préhension de la pomme 5. Guidage en translation (liaison glissière) Cette pièce fixée sur l ossature principale de l appareil, recevra le chariot supportant le moteur qui entraînera la vis supportant la pomme à éplucher.

13 6. Chariot porte moto réducteur+ Moteur + accouplement Noix d accouplement entre le Moto réducteur et la vis. Cet élément permet de solidariser l axe de sortie du Moto réducteur avec la vis supportant la pomme.

14 7. Ossature de l appareil et un des tiroirs. Notre appareil définitif a été modifié par rapport à notre idée initiale. Nous avons limité notre réalisation au tiroir devant réceptionner les épluchures.

15 8. Photos lors de la réalisation. Phase de découpe du plexiglas constituant l ossature de notre appareil. Pliage du plexiglas à l aide d un souffleur à air chaud.

16 Opération de pliage après chauffage. Ossature principale terminée

17 B. Choix des produits utilisés. Grace à la modélisation réalisée, nous avons pu passer à l étape «réalisation» et nous avons commandé les différents matériaux après avoir déterminé leurs caractéristiques. Pour soutenir et rigidifier le module nous avons utilisé des profilés auquel nous avons fixé des plaques de plexiglas afin de protéger le module, de manière à ce que le procédé soit facilement visible. Pour le choix du moteur nous avons tout d abord réalisé une expérience pour déterminer l ordre de grandeur de la force qu il faut exercer pour éplucher une pomme. 1. Choix du moto réducteur. Données: Rayon d'une pomme : env. 3,8 cm Force pour éplucher une pomme : < 12 N Nombre de tours pour éplucher totalement une pomme : env. 12 tours. 5 secondes pour éplucher la pomme

18 Calculs pour assurer l'épluchage de la pomme: Couple : C=Fmax*R = 12*3,8 = 46N.cm = 0,46 N.m On a N = 12 tours en 5 sec = 2,4 tr/s ( soit 144 tr/min ) D'où ω= N/30= *144/30 = 15 rad/s P=ω*C=15*0,46= 6,9 W Après ces différentes mesures et calculs, nous en avons déduit qu'il nous fallait un moteur pouvant délivrer une puissance d au minimum 7 W et d'une vitesse de rotation en sortie de environ 144 tr/min. Notre choix parmi les moteurs à notre disposition, s est porté ver le moteur 950D501 dont la vitesse de rotation en sortie est de 252 tr/mn sous 12V, et un couple nominal de 0,4 N.m ( Son couple Maximum est de 3 N.m). Nous pensons que ce moteur est un bon compromis pour notre application.

19 2. Choix des capteurs. Pour les capteurs de fin et début de course, nous avions le choix entre plusieurs types de capteurs : des capteurs de contacts ou des capteurs magnétiques. Avant tout, nous avons vérifier que les capteurs à notre disposition fonctionnaient. Il fallait aussi voir dans quel branchement ils fonctionnaient en interrupteur fermé lors d'une pression ( ou contact pour les magnétiques ), ou en interrupteur ouvert lors de cette même pression ou contact ( car ce sont des capteurs dont le fonctionnement varie en fonction des branchements fait ). On a donc testé leur résistance sans appui et avec appui ( ou sans contact et avec contact ), pour vérifier justement si ils fonctionnaient donc, et comment devions nous les brancher pour assurer la fonction que l'on voulait ( à savoir, interrupteur fermé lors d'un appui ): Pour les capteurs de contact, nous avions le choix entre deux tailles : Capteur au repos Capteur actif
.")
20 Capteur au repos Capteur actif Et les capteurs magnétiques : Capteur au repos Capteur actif

21 Nous avons choisi le capteur magnétique, car il ne nécessite aucune pression, aucun contact pour fonctionner, ce qui pourrait provoquer des frottements et abimer plus rapidement les matériaux. De surcroît, ces capteurs de contacts avaient besoin d'une pression relativement importante qui auraient donc pénalisé la puissance du moteur. 3. Choix du bouton poussoir Nous voulions un bouton poussoir assez petit et simple juste pour démarrer le cycle par une pression dessus. Nous avions à disposition ce genre de bouton dont nous avons donc tester la résistance pour vérifier son bon fonctionnement. Sans pression Avec pression
22 IV. Réalisation de la partie commande. A. Présentation de la partie programmation. Pour gérer la partie commande nous avons utilisé un module, automate appelé Zelio Soft comportant 8 entrées, 4 sorties. Il est alimenté en 24V/DC. Nous n avons pas utilisé un microcontrôleur car ce dernier aurait nécessité un environnement électronique et logiciel beaucoup plus complexe et long à mettre en œuvre que le module que nous avons choisi. Afin de programmer ce module nous avons utilisé un logiciel, Zelio Soft 2, qui peut utiliser deux modes de programmation : -le langage FBD qui se présente sous la forme de blocs fonctions. -le langage LADDER. Pour réaliser notre projet, nous avons choisi d utiliser le langage FBD, du fait de sa simplicité. En effet dans ce mode, nous disposons de nombreuses fonctions, telles que la fonction grafcet SFC, des fonctions logiques ou encore des fonctions pré-programmées. A l issue de la réalisation du programme nous avons eu la possibilité de le simuler sur l ordinateur afin de vérifier son fonctionnement. Une fois terminé et simulé, il ne restait plus qu à connecter le module via un cable à l ordinateur, pour charger le programme de notre automate.
23 1. Schéma de principe Moteur Marche Avant Moteur Marche Arrière Led Rouge Led Verte Automate Bouton Poussoir Capteur Position Avant Capteur Position Arrière L automate gère les signaux suivants : En entrée : - Le bouton poussoir qui permettra de lancer le cycle d épluchage de la pomme. - Le capteur de Position avant qui permet d arrêter le moteur lorsque la vis est complètement sortie. - Le capteur de Position Arrière qui permet d arrêter le moteur lorsque la vis est complètement entrée. En sortie : - Le signal Moteur Marche Avant qui permet d alimenter le moteur dans le sens correspondant à la sortie de la vis - Le signal Moteur Marche Arrière qui permet d alimenter le moteur dans le sens correspondant à la rentrée de la vis - Le signal de commande de la LED Verte. Cette LED permet de visualiser lorsque le système est prêt à démarrer la phase d épluchage, et lors de la pause de 5s. - Le signal de commande de la LED Rouge permet de visualiser lorsque le moteur est commandé. Lorsque la LED Verte est éteinte le système est occupé. 2. Choix des alimentations L automate doit être alimenté en 24 Volts continu. Le moteur doit être alimenté en 12 Volts continu. Par conséquent nous allons utiliser deux alimentations de 12 Volts continu qui seront reliées en série pour fabriquer le 24 Volts continu.
24 3. Schéma électrique du câblage Les contacts Q1 et Q2 permettent de piloter le moteur et donc de changer son sens de rotation : - Q1 ouvert et Q2 ouvert : le moteur ne tourne pas, - Q1 ferme et Q2 ouvert : le moteur tourne en marche avant, - Q1 ouvert et Q2 fermé : le moteur tourne en marche arrière, - Q1 fermé et Q2 fermé : cette combinaison est interdite car elle crée un court circuit entre le +24V et le masse GND. Le contact Q3 permet d alimenter et donc d allumer le LED Verte. Le contact Q4 permet d alimenter et donc d allumer le LED Rouge. Les entrées I1,I2 et I3 reçoivent les contacts «poussoir de démarrage», «contact de position Avant» et «contact de position Arrière». Calcul de la résistance R permettant de limiter le courant dans la LED : Lorsque la LED est allumée on a Vled = 1V, Iled = 5 ma et la tension principale E est de 12 Volts : E = Vled + R x Iled donc R = (E Vled)/Iled = 2200 Ohms
25 4. Grafcet de l automate 0 Capteur Position Arrière =0 Capteur Position Arrière =1 Moteur Marche Arrière. 1 Capteur Position Arrière =1 Led Verte Bouton Poussoir = 1 2 Moteur Marche Avant.Led Rouge Capteur Position Avant = 1 5s/X4 Moteur Marche Arrière.Led Rouge Capteur Position Arrière = 1 Grafcet de l automate L étape 1 permet de ramener le moteur en position initiale si celui-ci n est pas dans cette position au démarrage du cycle.
26 5. Grafcet en langage FBP V. CONCLUSION : Représentation du grafcet en langage FBP Nous avons conçu notre projet pour que notre appareil épluche des pommes de calibres différents et récupère les épluchures automatiquement, à l aide d une partie commande composée d un automate programmable. Il suffit tout d abord d embrocher la pomme et d appuyer ensuite sur le bouton pour démarrer le cycle. La partie opérative s enclenche et le moteur entraîne la vis en rotation et en translation pour amener la pomme en contact avec le système d épluchage. Ensuite, après une pause de 5 s permettant d enlever les tranches de pommes, le système recule jusqu au capteur arrière afin de pouvoir récupérer le trognon de la pomme. La Led Verte s allume et indique donc qu un nouveau cycle peut être à nouveau lancé.
27 VI. Annexes Fiches personnelles : Lucille Traube : Sébastien Baert : Pour moi, le PPE est avant tout un projet d'équipe car on est beaucoup plus efficace à plusieurs. Il vaut mieux traiter à plusieurs correctement et rapidement une partie plutôt que d'être dans l'individualité pour cette partie et perdre du temps, et être en difficultés. Ce PPE m'a bien fait comprendre cet esprit d'équipe pour un seul et même projet, ce qui est un avant-goût du vrai métier d'ingénieur. Cette expérience m'a particulièrement plu car il a débouché sur un prototype concret qui fonctionne parfaitement. Ce qui est particulièrement plaisant, c'est de se rendre compte que c'est nous qui avons créer ce système en passant par la conception, la modélisation, l'usinage, et enfin la production. Le tout en mêlant les deux matières des Sciences de l'ingénieur : électronique et mécanique. Romain Casabianca : Ce projet de PPE m a particulièrement passionné, car il m a permis de toucher à tous les domaines, que ce soit l électronique, l informatique ou la mécanique. Très vite je me suis rendu compte que ce sujet n était pas aussi simple qu il en avait l air. Les problèmes sont arrivés au moment de la recherche des solutions, mais grâce aux diverses idées du groupe nous avons pu converger vers une solution fonctionnelle. J ai particulièrement apprécié la modélisation mécanique du système sur ordinateur que j ai pu matérialiser au moment de l assemblage des modules et de la réalisation des pistons. La réalisation du produit, du câblage, du grafcet et la programmation de l automate ont pris une dimension plus grande dans l intérêt que je portais à cette activité, lorsque le dispositif a fonctionné conformément à nos attentes. En conclusion ce projet est une bonne introduction au monde des ingénieurs, car il m a permis d utiliser les notions apprises en cours mais aussi il m a fait découvrir d autres notions comme la programmation d automate, faire des cartes électroniques. De plus il m a donné le gout au métier d ingénieur et aux sciences de l ingénieur. Alexis Gracio :
28
29 Documentation technique :
Casisa Anthony DOSSIER PERSONNEL
 Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
Casisa Anthony TSSI DOSSIER PERSONNEL Année scolaire 2012-2013 La voiture solaire I) Planification 1) Introduction Dans le cadre du Projet Pluridisciplinaire Encadré en classe de Terminale SSI, nous avons
AUTOPORTE III Notice de pose
 AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
AUTOPORTE III Notice de pose Vous avez acquis le système AUTOPORTE, nous vous en remercions. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner correctement ce système. FONCTIONNEMENT
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE
 Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
PARTIE OPERATIVE PARTIE COMMANDE 1. LA PARTIE OPERATIVE ET LA PARTIE COMMANDE : 2. LEURS INTER-RELATIONS :
 1STE LES SOLUTIONS TECHNOLOGIQUES ASSOCIÉES AUX FONCTIONS L.T Mohammedia Cours STRUCTURE D UN SYSTÈME AUTOMATISÉ Prof : MAHBAB Page 1 / 3 1. LA PARTIE OPERATIVE ET LA PARTIE COMMANDE : 1.1 Présentation
1STE LES SOLUTIONS TECHNOLOGIQUES ASSOCIÉES AUX FONCTIONS L.T Mohammedia Cours STRUCTURE D UN SYSTÈME AUTOMATISÉ Prof : MAHBAB Page 1 / 3 1. LA PARTIE OPERATIVE ET LA PARTIE COMMANDE : 1.1 Présentation
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Notice d installation de la Centrale VIGIK DGM1
 Notice d installation de la Centrale VIGIK DGM1 Version 3.5 NOTICE DE MONTAGE ET D UTILISATION N homologation : PS 200306-01 MS 200306-02 Informations préliminaires Présentation des possibilités de la
Notice d installation de la Centrale VIGIK DGM1 Version 3.5 NOTICE DE MONTAGE ET D UTILISATION N homologation : PS 200306-01 MS 200306-02 Informations préliminaires Présentation des possibilités de la
CONCEVOIR ET CRÉER DES PETITES VOITURES
 CONCEVOIR ET CRÉER DES PETITES VOITURES Majorette est une entreprise spécialisée dans la conception et la fabrication industrielle de voitures miniatures destinées aux enfants. Les modèles sont conçus
CONCEVOIR ET CRÉER DES PETITES VOITURES Majorette est une entreprise spécialisée dans la conception et la fabrication industrielle de voitures miniatures destinées aux enfants. Les modèles sont conçus
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE
 ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
ARDUINO DOSSIER RESSOURCE POUR LA CLASSE Sommaire 1. Présentation 2. Exemple d apprentissage 3. Lexique de termes anglais 4. Reconnaître les composants 5. Rendre Arduino autonome 6. Les signaux d entrée
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
CFAO. Conception et Fabrication Assistée par Ordinateur. Le matériel utilisé en CFAO : un SYSTÈME AUTOMATISÉ. Barbecue Assisté par Ordinateur
 11 Découverte d'un système de CFAO Conception et Fabrication Assistée par Ordinateur CFAO Barbecue Assisté par Ordinateur Un système automatisé pour la salle des professeurs : la CAO (Cafetière Assistée
11 Découverte d'un système de CFAO Conception et Fabrication Assistée par Ordinateur CFAO Barbecue Assisté par Ordinateur Un système automatisé pour la salle des professeurs : la CAO (Cafetière Assistée
CIRCUIT DE CHARGE BOSCH
 LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
LA GUZZITHÈQUE 1/5 10/06/06 CIRCUIT DE CHARGE BOSCH Ce document est issu d un article de l Albatros, revue de liaison du MGCF, lui-même issu du Gambalunga, revue anglaise de liaison du MGC d Angleterre.
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur.
 C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
RELAIS STATIQUE. Tension commutée
 RELAIS STATIQUE Nouveau Relais Statique Monophasé de forme compacte et économique Coût réduit pour une construction modulaire Modèles disponibles de 15 à 45 A Modèles de faible encombrement, avec une épaisseur
RELAIS STATIQUE Nouveau Relais Statique Monophasé de forme compacte et économique Coût réduit pour une construction modulaire Modèles disponibles de 15 à 45 A Modèles de faible encombrement, avec une épaisseur
MODE OPÉRATOIRE. VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.
 Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.") VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
ROTOLINE NOTICE DE POSE
 ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
ROTOLINE NOTICE DE POSE Nous vous remercions d avoir choisi le Système ROTOLINE pour ouvrir votre portail. Veuillez lire attentivement cette notice, vous serez à même de faire fonctionner ce système correctement.
CIRCUITS DE PUISSANCE PNEUMATIQUES
 V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
V ACTIONNEURS PNEUMATIQUES : 51 Généralités : Ils peuvent soulever, pousser, tirer, serrer, tourner, bloquer, percuter, abloquer, etc. Leur classification tient compte de la nature du fluide (pneumatique
-Identifier les éléments qui déterminent le coût d un objet technique.
 A / LES OBJETS TECHNIQUES EN DOMOTIQUE B / LA REPRESENTATION FONCTIONNELLE C / LE RESPECT DES CONTRAINTES D / LA CHAINE D ENERGIE D UN OBJET TECHNIQUE E/ LA CHAINE D INFORMATION D UN OBJET TECHNIQUE A
A / LES OBJETS TECHNIQUES EN DOMOTIQUE B / LA REPRESENTATION FONCTIONNELLE C / LE RESPECT DES CONTRAINTES D / LA CHAINE D ENERGIE D UN OBJET TECHNIQUE E/ LA CHAINE D INFORMATION D UN OBJET TECHNIQUE A
Catalogue de machines. CNC-Carolo. Edition de juillet 2011
 Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
DIAGNOSTIQUER EN UTILISANT L INFORMATIQUE
 DIAGNOSTIQUER EN UTILISANT L INFORMATIQUE Maintenance industrielle Niveau IV CAFOC - GIP de l académie de Lyon - 39, rue Pierre Baizet - CP201-69336 Lyon cedex 09 04 72 19 80 21-04 78 47 27 11 - gipal-cafoc@ac-lyon.fr
DIAGNOSTIQUER EN UTILISANT L INFORMATIQUE Maintenance industrielle Niveau IV CAFOC - GIP de l académie de Lyon - 39, rue Pierre Baizet - CP201-69336 Lyon cedex 09 04 72 19 80 21-04 78 47 27 11 - gipal-cafoc@ac-lyon.fr
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Centrale d alarme DA996
 Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
Centrale d alarme DA996 Référence : 7827 La DA-996 est une centrale d alarme pour 6 circuits indépendants les uns des autres, avec ou sans temporisation, fonctions 24 heures, sirène, alerte et incendie.
PASSAGE A NIVEAU HO/N
 PASSAGE A NIVEAU HO/N Description Ce passage à niveau en laiton est composé de deux demi-barrières, ainsi que de deux feux lumineux rouges. Vous pouvez utiliser ce PN sur un nombre quelconque de voie y
PASSAGE A NIVEAU HO/N Description Ce passage à niveau en laiton est composé de deux demi-barrières, ainsi que de deux feux lumineux rouges. Vous pouvez utiliser ce PN sur un nombre quelconque de voie y
Études et Réalisation Génie Électrique
 Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Études et Réalisation Génie Électrique Chargeur de batterie
Université François-Rabelais de Tours Institut Universitaire de Technologie de Tours Département Génie Électrique et Informatique Industrielle Études et Réalisation Génie Électrique Chargeur de batterie
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
ANALYSE FONCTIONNELLE INTERNE DEVOIR LIBRE
 I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
I INTRODUCTION : 1) Citer la fonction globale des systèmes suivants : Scooter : Marteau : Grille pain : Téléphone portable : Agrafeuse : 2) De quelle famille font partie les systèmes suivants? DM Etude
Un système d aide aux handicapés
 Olympiades de physique 2006/2007 Un système d aide aux handicapés POTHAIN Mélanie LAFRECHOUX Leslie BOUGEANT Matthieu Lycée G. St Hilaire - ETAMPES encadrés par M. LEFEVRE Sujet : Le carrousel Problématique
Olympiades de physique 2006/2007 Un système d aide aux handicapés POTHAIN Mélanie LAFRECHOUX Leslie BOUGEANT Matthieu Lycée G. St Hilaire - ETAMPES encadrés par M. LEFEVRE Sujet : Le carrousel Problématique
(ANALYSE FONCTIONNELLE ET STRUCTURELLE)
") DOSSIER (ANALYSE FONCTIONNELLE ET STRUCTURELLE) Diagramme pieuvre. Diagramme F.A.S.T. Nomenclature Dessin d ensemble Vue éclatée Ce dossier comprend : 1. Recherche du Besoin Fondamental du Produit A qui
DOSSIER (ANALYSE FONCTIONNELLE ET STRUCTURELLE) Diagramme pieuvre. Diagramme F.A.S.T. Nomenclature Dessin d ensemble Vue éclatée Ce dossier comprend : 1. Recherche du Besoin Fondamental du Produit A qui
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Système de surveillance vidéo
 Conrad sur INTERNET www.conrad.fr N O T I C E Version 12/01 Entretien Pour un fonctionnement correct de votre système de surveillance vidéo, prenez note des conseils suivants : 1/ Tenez la caméra et le
Conrad sur INTERNET www.conrad.fr N O T I C E Version 12/01 Entretien Pour un fonctionnement correct de votre système de surveillance vidéo, prenez note des conseils suivants : 1/ Tenez la caméra et le
Centrale de surveillance ALS 04
 Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Centrale de surveillance ALS 04 Notice d'installation et d'utilisation Version 1.0 - B 6 rue Alory 35740 Pacé France Tel : +33 (0) 2 99 60 16 55 Fax : +33 (0) 2 99 60 22 29 www.sodalec.fr - 1 - Notice
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB
 Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
ENREGISTREUR DE TEMPERATURE
 ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
ENREGISTREUR DE TEMPERATURE Jean-Pierre MANDON 2005 www.pictec.org Cet enregistreur de température a été réalisé dans le cadre de la construction d'un chauffe eau solaire. Il me permet d'enregistrer les
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Installation kit NTS 820-F 1987009E9NN
 Installation kit NTS 820-F 1987009E9NN Nussbaum France Central 2, 460 Clos de la courtine 93160 Noisy le grand 01 78 78 72 00 www.nussbaum-france.com Préalable : Cette notice va vous aidez pour la modification
Installation kit NTS 820-F 1987009E9NN Nussbaum France Central 2, 460 Clos de la courtine 93160 Noisy le grand 01 78 78 72 00 www.nussbaum-france.com Préalable : Cette notice va vous aidez pour la modification
Votre partenaire de la fermeture :
 Votre partenaire de la fermeture : Kit Facil 24 v (REF : DO IT FCH) KIT E 24 V I Bornier alimentation : II Bornier Moteurs : (il est indispensable d avoir des butées en ouverture et fermeture) Alimentation
Votre partenaire de la fermeture : Kit Facil 24 v (REF : DO IT FCH) KIT E 24 V I Bornier alimentation : II Bornier Moteurs : (il est indispensable d avoir des butées en ouverture et fermeture) Alimentation
Module 3 : L électricité
 Sciences 9 e année Nom : Classe : Module 3 : L électricité Partie 1 : Électricité statique et courant électrique (chapitre 7 et début du chapitre 8) 1. L électrostatique a. Les charges et les décharges
Sciences 9 e année Nom : Classe : Module 3 : L électricité Partie 1 : Électricité statique et courant électrique (chapitre 7 et début du chapitre 8) 1. L électrostatique a. Les charges et les décharges
FRANCAIS DGM1. Centrale Vigik 1 porte. N d homologation : - PS-200306-01 - MS-200306-02. Gamme: Vigik MANUEL D INSTALLATION.
 ANCAIS N d homologation : - PS-200306-01 - MS-200306-02 Gamme: Vigik MANUEL D INSTALLATION Group Products 1] PRESENTATION DU PRODUIT Conforme Mifare - ISO 14443A (système ouvert à toutes les marques de
ANCAIS N d homologation : - PS-200306-01 - MS-200306-02 Gamme: Vigik MANUEL D INSTALLATION Group Products 1] PRESENTATION DU PRODUIT Conforme Mifare - ISO 14443A (système ouvert à toutes les marques de
7 bis impasse Denis Dulac - 94700 Maisons-Alfort FRANCE Tél. : 01 43 68 06 13 / Fax : 01 43 68 66 09 @ : promattex@promattex.com www.promattex.
 7 bis impasse Denis Dulac - 94700 Maisons-Alfort FRANCE Tél. : 01 43 68 06 13 / Fax : 01 43 68 66 09 @ : promattex@promattex.com www.promattex.com NOTICE DB-30 Ce manuel de montage contient les éléments
7 bis impasse Denis Dulac - 94700 Maisons-Alfort FRANCE Tél. : 01 43 68 06 13 / Fax : 01 43 68 66 09 @ : promattex@promattex.com www.promattex.com NOTICE DB-30 Ce manuel de montage contient les éléments
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
Manuel d'utilisation du détecteur de fumée
 Manuel d'utilisation du détecteur de fumée Détecteur de fumée photoélectrique alimenté par pile alcaline 9V. Introduction Merci d'avoir choisi notre produit pour vos besoin en détection de fumée. Vous
Manuel d'utilisation du détecteur de fumée Détecteur de fumée photoélectrique alimenté par pile alcaline 9V. Introduction Merci d'avoir choisi notre produit pour vos besoin en détection de fumée. Vous
HAM841K CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION
 CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION MANUEL D'UTILISATION MANUEL D'UTILISATION CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION INTRODUCTION Le
CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION MANUEL D'UTILISATION MANUEL D'UTILISATION CENTRALE D'ALARME POUR SYSTEMES DE SECURITE COMMERCIAUX ET D'HABITATION INTRODUCTION Le
Notice d utilisation. Présentation générale...p 2 à 3. Installation...P 3 à 6. Fonctionnement...P 9. Agréé une marque déposée par La Poste
 Notice d utilisation Agréé une marque déposée par La Poste Présentation générale...p 2 à 3 Installation...P 3 à 6 Fonctionnement...P 9 Présentation générale La centrale Vachette FACILY PASS propose une
Notice d utilisation Agréé une marque déposée par La Poste Présentation générale...p 2 à 3 Installation...P 3 à 6 Fonctionnement...P 9 Présentation générale La centrale Vachette FACILY PASS propose une
1- Maintenance préventive systématique :
 Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Page 1/9 Avant toute opération vérifier que le système soit correctement consigné. Avant de commencer toute activité, vous devez être en possession d une attestation de consignation 1- Maintenance préventive
Fournir un guide visuel des différentes étapes nécessaires à l utilisation d une imprimante µdelta.
 Version 1.0.5 Introduction Objectif : Fournir un guide visuel des différentes étapes nécessaires à l utilisation d une imprimante µdelta. Auteurs de ce document : emotion Tech http://www.reprap-france.com
Version 1.0.5 Introduction Objectif : Fournir un guide visuel des différentes étapes nécessaires à l utilisation d une imprimante µdelta. Auteurs de ce document : emotion Tech http://www.reprap-france.com
Fiche technique. 1) Pour faire tourner le moteur en avant ou en arrière (deux straps)... 2
 Pour faire tourner le moteur en avant ou en arrière (deux straps)... 2") Fiche technique Test et mise en service rapide des variateurs ATV12 Gamme : ATV12 Introduction Comment mettre en œuvre le variateur ATV12 pour des applications simples. Comment tester rapidement ce variateur.
Fiche technique Test et mise en service rapide des variateurs ATV12 Gamme : ATV12 Introduction Comment mettre en œuvre le variateur ATV12 pour des applications simples. Comment tester rapidement ce variateur.
ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview.
 ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview. Sciences et Technologies de l Industrie et du Développement Durable Formation des enseignants parcours : ET24 Modèle de
ET 24 : Modèle de comportement d un système Boucles de programmation avec Labview. Sciences et Technologies de l Industrie et du Développement Durable Formation des enseignants parcours : ET24 Modèle de
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
1. PRESENTATION GENERALE DU PRODUIT
 1. PRESENTATION GENERALE DU PRODUIT 1.1 Mise en situation : A quoi servent les pneus? Les pneus sont des éléments qui relient la voiture à la route. Ils doivent donc être en parfait état pour remplir leurs
1. PRESENTATION GENERALE DU PRODUIT 1.1 Mise en situation : A quoi servent les pneus? Les pneus sont des éléments qui relient la voiture à la route. Ils doivent donc être en parfait état pour remplir leurs
Série HarmonicGuard Application Omnibus Filtre Harmonique Actif. Démarrage Rapide Configuration du Logiciel de l unité
 Série HarmonicGuard Application Omnibus Filtre Harmonique Actif Démarrage Rapide Configuration du Logiciel de l unité TCI, LLC W132 N10611 Grant Drive Germantown, Wisconsin 53022 Téléphone: 414-357-4480
Série HarmonicGuard Application Omnibus Filtre Harmonique Actif Démarrage Rapide Configuration du Logiciel de l unité TCI, LLC W132 N10611 Grant Drive Germantown, Wisconsin 53022 Téléphone: 414-357-4480
Electrotechnique: Electricité Avion,
 Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
Electrotechnique: Electricité Avion, La machine à Courant Continu Dr Franck Cazaurang, Maître de conférences, Denis Michaud, Agrégé génie Electrique, Institut de Maintenance Aéronautique UFR de Physique,
epowerswitch 8XM+ Fiche technique
 Fiche technique L est le successeur de l epowerswitch 8XM. Il peut piloter jusqu à 136 prises secteur et dispose de borniers à vis amovibles en face avant pour une connexion aisée et rapide de capteurs
Fiche technique L est le successeur de l epowerswitch 8XM. Il peut piloter jusqu à 136 prises secteur et dispose de borniers à vis amovibles en face avant pour une connexion aisée et rapide de capteurs
Bien commencer avec un LaunchPad MSP430G et un Breadboard
 Bien commencer avec un LaunchPad MSP430G et un Breadboard Pierre-Yves Rochat Le LaunchPad et Energia Texas Instrument propose un environnement de développement très complet pour ses MSP430, appelé Code
Bien commencer avec un LaunchPad MSP430G et un Breadboard Pierre-Yves Rochat Le LaunchPad et Energia Texas Instrument propose un environnement de développement très complet pour ses MSP430, appelé Code
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
A- Observez la vidéo A présentant le fonctionnement de deux objets techniques que nous
 Nous savons qu'un système d'alarme permet de protéger une habitation en détectant et en signalant une ouverture de porte, de fenêtre ou un mouvement dans une pièce. Mais comment détecter et existe il un
Nous savons qu'un système d'alarme permet de protéger une habitation en détectant et en signalant une ouverture de porte, de fenêtre ou un mouvement dans une pièce. Mais comment détecter et existe il un
Caractéristiques techniques du module électronique Témoin lumineux rouge
 Caractéristiques techniques du module électronique Témoin lumineux rouge Raccordement terminal de programmation TELU DATA Pile lithium de maintien de l heure type CR032 Résistance de terminaison 120 Ω
Caractéristiques techniques du module électronique Témoin lumineux rouge Raccordement terminal de programmation TELU DATA Pile lithium de maintien de l heure type CR032 Résistance de terminaison 120 Ω
Electrotechnique. Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/
 Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
Electrotechnique Fabrice Sincère ; version 3.0.5 http://pagesperso-orange.fr/fabrice.sincere/ 1 Sommaire 1 ère partie : machines électriques Chapitre 1 Machine à courant continu Chapitre 2 Puissances électriques
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
Panneau solaire ALDEN
 SOMMAIRE 1. Présentation... 1.1. Mise en situation... 1.2. Analyse du besoin... 4 1.. Problématique... 4 1.4. Expression du besoin... 5 1.5. Validation du besoin... 5 2. Analyse fonctionnelle... 2.1. Définition
SOMMAIRE 1. Présentation... 1.1. Mise en situation... 1.2. Analyse du besoin... 4 1.. Problématique... 4 1.4. Expression du besoin... 5 1.5. Validation du besoin... 5 2. Analyse fonctionnelle... 2.1. Définition
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
Nouveau! Serrure invisible PS. Contrôle et protège vos valeurs! Gamme Abiolock. la serrure invisible
 Nouveau! Serrure invisible PS Contrôle et protège vos valeurs! Gamme Abiolock la serrure invisible SOMMAIRE 1. Sécuriser un tiroir, un placard. ABIOLOCK STANDARD page 5 2. Sécuriser l accès à une vitrine
Nouveau! Serrure invisible PS Contrôle et protège vos valeurs! Gamme Abiolock la serrure invisible SOMMAIRE 1. Sécuriser un tiroir, un placard. ABIOLOCK STANDARD page 5 2. Sécuriser l accès à une vitrine
A. CARACTERISTIQUES TECHNIQUES.
 Page : 2 A. CARACTERISTIQUES TECHNIQUES. A.1. VUE D ENSEMBLE A.2. PRINCIPE DE FONCTIONNEMENT!" #! $! %&' ( ) * µ +, µ $# (& % ± -. /01)0$ ' &%(% 2 3,)/4 $ A.3. CARACTERISTIQUES MECANIQUES. PARAMETRES Valeur
Page : 2 A. CARACTERISTIQUES TECHNIQUES. A.1. VUE D ENSEMBLE A.2. PRINCIPE DE FONCTIONNEMENT!" #! $! %&' ( ) * µ +, µ $# (& % ± -. /01)0$ ' &%(% 2 3,)/4 $ A.3. CARACTERISTIQUES MECANIQUES. PARAMETRES Valeur
UP 588/13 5WG1 588-2AB13
 Informations Technique Description du produit et de ses fonctionnalités Dans le menu «Réglage» vous avez le choix entre 4 styles d affichage. Les accessoires suivants sont nécessaires: è è è 5WG1 588 8AB14
Informations Technique Description du produit et de ses fonctionnalités Dans le menu «Réglage» vous avez le choix entre 4 styles d affichage. Les accessoires suivants sont nécessaires: è è è 5WG1 588 8AB14
Chapitre N 8. Copyright LGM DEPANNAGE ELECTRIQUE : 1- Procéder avec méthode pour tester un circuit : 2: Contrôle de la continuité:
 - Procéder avec méthode pour tester un circuit : DEPANNAE EECTRIQUE : : Contrôle de la continuité: : Contrôle sous tension: - Exercices : Chapitre N 8 5- Utilisation du grafcet, du gemma comme outils de
- Procéder avec méthode pour tester un circuit : DEPANNAE EECTRIQUE : : Contrôle de la continuité: : Contrôle sous tension: - Exercices : Chapitre N 8 5- Utilisation du grafcet, du gemma comme outils de
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Caractéristiques techniques
 Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
Fiche technique LR4A-MOD Servomoteur Modbus pour vannes à boisseau sphérique étanche, et 6 voies Couple 5 Nm Alimentation électrique 4V AC/DC Communication par Modbus RU (RS-485) Conversion entrée sonde
NOTICE DE MISE EN SERVICE
 NOTICE DE MISE EN SERVICE Dispositif de Surpression à Variation, pompe de 2,2kW 1. GENERALITES Avant de procéder à l installation, lire attentivement cette notice de mise en service. CONTROLE PRELIMINAIRE
NOTICE DE MISE EN SERVICE Dispositif de Surpression à Variation, pompe de 2,2kW 1. GENERALITES Avant de procéder à l installation, lire attentivement cette notice de mise en service. CONTROLE PRELIMINAIRE
Dossier technique. Présentation du bus DMX et Utilisation des options EL13 / EL14 ERM AUTOMATISMES INDUSTRIELS 1 LE PROTOCOLE DMX 2
 ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : Contact@erm-automatismes.com 1
ERM AUTOMATISMES INDUSTRIELS 280 Rue Edouard Daladier 84973 CARPENTRAS Cedex Tél : 04 90 60 05 68 - Fax : 04 90 60 66 26 Site : http://www.erm-automatismes.com/ E-Mail : Contact@erm-automatismes.com 1
Démontage d'un ordinateur
 Espaces multimédias Communauté de Communes Moyenne Vilaine et Semnon : Démontage d'un ordinateur 1- A quoi sert-il de démonter son ordinateur? A) Par simple curiosité B) Pour nettoyer C) Pour remplacer
Espaces multimédias Communauté de Communes Moyenne Vilaine et Semnon : Démontage d'un ordinateur 1- A quoi sert-il de démonter son ordinateur? A) Par simple curiosité B) Pour nettoyer C) Pour remplacer
NOUVEAU. Les plus puissants chariots télescopiques Kramer jamais conçus. Chariots Télescopiques
 407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
407 507 509 Chariots Télescopiques NOUVEAU Les plus puissants chariots télescopiques Kramer jamais conçus. Charge utile de 4,3 t à 5,5 t et hauteur de levage de 7 à 9 m. Les nouveaux chariots télescopiques
Module 3 : L électricité
 Sciences 9 e année Nom : Classe : Module 3 : L électricité Sci9.3.1 : Électricité statique et courant électrique, Sci9.3.2 : Les circuits, la résistance et la Loi d Ohm Sci9.3.3 : La transmission de l
Sciences 9 e année Nom : Classe : Module 3 : L électricité Sci9.3.1 : Électricité statique et courant électrique, Sci9.3.2 : Les circuits, la résistance et la Loi d Ohm Sci9.3.3 : La transmission de l
epowerswitch 4M+ Fiche technique
 Fiche technique L est l unité de distribution d alimentation (Power Distribution Unit) la plus demandée de la famille de produits Neol epowerswitch. Une conception compacte, le serveur web intégré et son
Fiche technique L est l unité de distribution d alimentation (Power Distribution Unit) la plus demandée de la famille de produits Neol epowerswitch. Une conception compacte, le serveur web intégré et son
STI2D : Enseignements Technologiques Transversaux
 STI2D : Enseignements Technologiques Transversaux Activité : Etude des transfert énergétiques dans la cafetière Nespresso Problématique : On calcule la puissance électrique consommée, on détermine l énergie
STI2D : Enseignements Technologiques Transversaux Activité : Etude des transfert énergétiques dans la cafetière Nespresso Problématique : On calcule la puissance électrique consommée, on détermine l énergie
Séance du jeudi 22 novembre 2012 (13h30 16h30)
") Séance du jeudi 22 novembre 2012 (13h30 16h30) Lieu : salle de sciences physiques, lycée français de Luanda Public : entre 6 et 12 élèves de 3eme, 2de et 1ereS (un des élèves ayant amené son propre robot
Séance du jeudi 22 novembre 2012 (13h30 16h30) Lieu : salle de sciences physiques, lycée français de Luanda Public : entre 6 et 12 élèves de 3eme, 2de et 1ereS (un des élèves ayant amené son propre robot
Notice d installation sur le véhicule
 Boîtier TACHYCOMGPRS Système de transfert automatique et à distance des données issues des chronotachygraphes numériques (Fichiers au format réglementaire DDD) Notice d installation sur le véhicule Antenne
Boîtier TACHYCOMGPRS Système de transfert automatique et à distance des données issues des chronotachygraphes numériques (Fichiers au format réglementaire DDD) Notice d installation sur le véhicule Antenne
Manuel de référence O.box
 Manuel de référence O.box Descriptif du coffret O.box est un boîtier plastique utilisable sur étagère, position murale en en rack 19 pouces. La connectique et les voyants sont en face avant. La connectique,
Manuel de référence O.box Descriptif du coffret O.box est un boîtier plastique utilisable sur étagère, position murale en en rack 19 pouces. La connectique et les voyants sont en face avant. La connectique,
MODE D EMPLOI HAA51 DETECTEUR PASSIF D INTRUSION A INFRAROUGE INTRODUCTION
 MODE D EMPLOI HAA51 DETECTEUR PASSIF D INTRUSION A INFRAROUGE INTRODUCTION Le HAA51 est un détecteur passif d'intrusion à infrarouge conçu pour un usage intérieur dans des systèmes de sécurité en site
MODE D EMPLOI HAA51 DETECTEUR PASSIF D INTRUSION A INFRAROUGE INTRODUCTION Le HAA51 est un détecteur passif d'intrusion à infrarouge conçu pour un usage intérieur dans des systèmes de sécurité en site
Une liste des distributeurs Paxton se trouve sur le site Internet - http://paxton.info/508
 1/1/009 Ins-30108-F Kit d évaluation Net Paxton Pour une assistance technique, merci de contacter votre fournisseur Une liste des distributeurs Paxton se trouve sur le site Internet - http://paxton.info/508
1/1/009 Ins-30108-F Kit d évaluation Net Paxton Pour une assistance technique, merci de contacter votre fournisseur Une liste des distributeurs Paxton se trouve sur le site Internet - http://paxton.info/508
modélisation solide et dessin technique
 CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
TP - Alarme de voiture / Approche fonctionnelle
 TP - Alarme de voiture / Approche fonctionnelle Tous les objets techniques, même les plus compliqués, sont étudiés à l aide d une méthode appelée : étude fonctionnelle ou systémique. 1/ Présentation du
TP - Alarme de voiture / Approche fonctionnelle Tous les objets techniques, même les plus compliqués, sont étudiés à l aide d une méthode appelée : étude fonctionnelle ou systémique. 1/ Présentation du
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
LA VAPEUR ET LA FUMÉE S ÉVAPORENT INSTANTANÉMENT MIRACLE-LINE
 LA VAPEUR ET LA FUMÉE S ÉVAPORENT INSTANTANÉMENT MIRACLE-LINE UNE NOUVELLE ÈRE DONNE SA PLACE À L ESSENTIEL Miracle-Line Vous n avez encore jamais vu la vapeur et la fumée disparaître de la sorte : aussi
LA VAPEUR ET LA FUMÉE S ÉVAPORENT INSTANTANÉMENT MIRACLE-LINE UNE NOUVELLE ÈRE DONNE SA PLACE À L ESSENTIEL Miracle-Line Vous n avez encore jamais vu la vapeur et la fumée disparaître de la sorte : aussi
Astra Elite AM/3 Manuel d'installation
 1) Caractéristiques techniques Astra Elite AM/3 Manuel d'installation Alimentation : - Tension : 9 à 16 V- - Consommation : 33 ma repos/40 ma en alarme - Ondulation : 2 V c à c à 12 V- Canal Hyperfréquence
1) Caractéristiques techniques Astra Elite AM/3 Manuel d'installation Alimentation : - Tension : 9 à 16 V- - Consommation : 33 ma repos/40 ma en alarme - Ondulation : 2 V c à c à 12 V- Canal Hyperfréquence
Relais d'arrêt d'urgence, protecteurs mobiles
 PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
PNOZ Relais jusqu'en d'arrêt 11 catégorie d'urgence, 4, EN 954-1 protecteurs mobiles Bloc logique de sécurité pour la surveillance de poussoirs d'arrêt d'urgence et de protecteurs mobiles Homologations
SCIENCES DE L INGENIEUR
 SCIENCES DE L INGENIEUR 2013/2 014 ANALYSE DU BESOIN ANALYSE FONCTIONNELLE EXTERNE ANALYSE FONCTIONNELLE INTERNE CHAINE FONCTIONNELLE EXERCICES Glioula.mohamed@gmail.com 0699717946 1 A- Généralités et
SCIENCES DE L INGENIEUR 2013/2 014 ANALYSE DU BESOIN ANALYSE FONCTIONNELLE EXTERNE ANALYSE FONCTIONNELLE INTERNE CHAINE FONCTIONNELLE EXERCICES Glioula.mohamed@gmail.com 0699717946 1 A- Généralités et
Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle des systèmes
 Section : S Option : Sciences de l ingénieur Discipline : Génie Électrique Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle
Section : S Option : Sciences de l ingénieur Discipline : Génie Électrique Les outils graphiques d expression pour l analyse fonctionnelle des systèmes Domaine d application : Représentation conventionnelle
Fiche technique Schneider
 Fiche technique Schneider Test et mise en service rapide des variateurs ATV11 Gamme : ATV11 Introduction Comment mettre en œuvre le variateur ATV11 pour des applications simples. Comment tester rapidement
Fiche technique Schneider Test et mise en service rapide des variateurs ATV11 Gamme : ATV11 Introduction Comment mettre en œuvre le variateur ATV11 pour des applications simples. Comment tester rapidement
Analyse et conception de l'objet technique
 Technologie 4ème Analyse et conception de l'objet technique 4ACOT 01 1/ les objets techniques de domotique Les objets techniques sont conçus pour répondre à différents besoins. Ils assistent les êtres
Technologie 4ème Analyse et conception de l'objet technique 4ACOT 01 1/ les objets techniques de domotique Les objets techniques sont conçus pour répondre à différents besoins. Ils assistent les êtres
Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03
 Appareil de contrôle de niveau NK312 24V Manuel d utilisation Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03 Seite 1 Manuel d utilisation
Appareil de contrôle de niveau NK312 24V Manuel d utilisation Systèmes pour la surveillance et la commande lors de l entreposage et du transvasement de liquides. BA00.0022.10 100 03 Seite 1 Manuel d utilisation
Comment retrouver le fichier "bingo" sauvegardé dans l'ordinateur? Socle commun
 Objectifs Auto- Evaluation Socle commun Technologie Expliquer comment sont stockées les informations dans un ordinateur. o IV-2 Recenser des données, les classer, les identifier, les stocker, les retrouver
Objectifs Auto- Evaluation Socle commun Technologie Expliquer comment sont stockées les informations dans un ordinateur. o IV-2 Recenser des données, les classer, les identifier, les stocker, les retrouver
Codes d état, codes diagnostic, codes de pannes et programmes de contrôle. VKK ecovit /4
 Codes d état, codes diagnostic, codes de pannes et programmes de contrôle VKK ecovit /4 Signification des symboles figurant sur l écran. Anomalie dans la conduite d air/d évacuation des produits de combustion.
Codes d état, codes diagnostic, codes de pannes et programmes de contrôle VKK ecovit /4 Signification des symboles figurant sur l écran. Anomalie dans la conduite d air/d évacuation des produits de combustion.