ROBOT DE PRESSE INJECTION PLASTIQUE (Banque PT SIA 2006)
|
|
|
- Eugène Albert
- il y a 10 ans
- Total affichages :
Transcription
1 1.MISE EN SITUATION ROBOT DE PRESSE INJECTION PLASTIQUE (Banque PT SIA 2006) Les pièces injectées représentent aujourd'hui une grande part de la production industrielle. Le déchargement des presses d'injection est généralement effectué en automatique par des robots 3 axes cartésiens, voire par des robots 6 axes lorsque des problèmes dégagement imposent des trajectoires complexes de la pièce hors du moule. Ce déchargement représente un enjeu stratégique : la durée du cycle du robot pour récupérer la pièce dans le moule engendre un coût non négligeable sur le prix final de la piece produite puisqu'il n'y a pas d'injection pendant ce temps. Le sujet porte sur une cellule d'injection automatisée produisant des pièces injectées. Les pièces produites sont des ardoises (figure 1-1) composées d'un insert en carton plastifié surmoulé pour obtenir un bord plastifié autour de celui-ci. Les inserts ont déposés dans le moule de la presse avant la fermeture du moule. Le moule comporte deux empreintes afin de réaliser 2 ardoises par cycle. La cellule d'injection (figure 1-23) est constituée des sous-ensembles suivants : deux magasins (1.1 et 1.2) d'inserts (cartons bruts) comportant deux racks de deux rangées de cartons chacun ; un robot de chargement / déchargement de la presse (robot 1) équipé d'un double préhenseur deux jeux de ventouses. Le premier préhenseur, ses ventouses V1, récupère les ardoises moulées sur le moule fixe. Le deuxième préhenseur, ses ventouses V2, assure la prise et la dépose des ardoises brutes. Il est équipé d'une unité de rotation à 90 pour effectuer le changement d'orientation entre la préhension dans les magasins 1.i et la dépose des inserts sur le moule mobile ; une presse d'injection permettant de mouler deux ardoises simultanément ; un robot de palettisation (robot 2) des ardoises finies équipé d'un préhenseur à ventouses ; une zone de dépose par le robot 1 des ardoises finies constituée de deux supports D1 et D2 ; deux magasins (2.1 et 2.2) de pièces finies comportant chacun un rack de quatre ardoises empilées à plat. Lycée du Hainaut-Valenciennes page 1/10 Version du 12/11/08

2 Description du fonctionnement : La cellule d injection est alimentée par deux magasins dans lesquels les inserts en cartons (ardoises brutes) sont empiles à plat dans des racks verticaux (magasins 1.1 et 1.2). Le robot 1, comportant trois axes cartésiens, équipé d'un jeu de ventouses (VI), prélève simultanément deux ardoises brutes (respectivement en a, b, c puis d) et vient les placer sur le côté mobile du moule. Des ventouses placées dans celui-ci permettent de maintenir ces inserts en attendant la fermeture du moule. Le robot 1 possède un deuxième préhenseur en vis-à-vis du premier. Il est équipe de ventouses (V2) qui vont permettre de récupérer les ardoises venant d'être moulées sur le côté fixe du moule. A l'issue de l'opération de chargement / déchargement, le robot a donc déposé les inserts (cartons bruts) dans le moule et récupéré les deux ardoises finies. La phase de moulage peut alors débuter. La phase de chargement / déchargement ayant été exécutée, le robot 1 dépose une à une les ardoises verticalement dans un support spécifique (D1 et D2). Un deuxième robot 3 axes cartésiens (robot 2) récupère alors chaque ardoise (une la fois) pour la déposer dans un magasin constitue par les ardoises empilées à plat dans des racks verticaux (magasins 2.1 et 2.2). Lycée du Hainaut-Valenciennes page 2/10 Version du 12/11/08

3 Structure du robot cartésien Le robot 1 de chargement / déchargement de la cellule d'injection est constitué d'un portique cartésien 3 axes. Chaque axe est composé d'un moteur synchrone autopiloté, d'un réducteur à train épicycloïdal, d'un système de transformation de mouvement (de type pignon - crémaillère pour les axes X et Z, poulies - courroie crantée pour Y) et d'un chariot guidé par des galets. 2.OBJECTIF On s intéresse ici uniquement à l axe Z. On cherche à vérifier si le moteur installé sur l axe Z est capable d assurer des capacités cinématiques et dynamiques compatibles les cadences et les caractéristiques des pièces qui sont manipulées. Lycée du Hainaut-Valenciennes page 3/10 Version du 12/11/08

4 3.NOTATIONS - HYPOTHESES L axe Z fonctionne un cycle imposé permettant de respecter les cadences du cycle. Notations : : Couple électromécanique du moteur : Moment d inertie de l arbre moteur : Vitesse angulaire de l arbre moteur : Moment d inertie du pignon : Vitesse angulaire du pignon : Moment d inertie du réducteur ramené sur l arbre moteur : Vitesse linéaire du préhenseur : Masse totale de la poutre verticale (sans pièce) : Accélération linéaire du préhenseur : Masse d une ardoise finie : Masse d un insert (carton brut) : Rayon primitif du pignon moteur : Rapport de réduction On pose : Hypothèses : Les solides sont considérés indéformables ; Les efforts dus aux frottements secs et visqueux sont négligés, les liaisons sont considérées parfaites ; La masse embarquée est maximale. Elle est égale à ; La pesanteur est prise en compte : Lycée du Hainaut-Valenciennes page 4/10 Version du 12/11/08
 : Rayon primitif du pignon moteur : Rapport de réduction On pose : Hypothèses : Les solides sont considérés indéformables ; Les efforts dus aux frottements secs et")
. Le déroulement du cycle est décrit dans le tableau 1.1. Lycée du Hainaut-Valenciennes page 5/10 Version du 12/11/08")
5 Le cycle étudié se situe à la fin de l injection : depuis la préhension des pièces venant d'être injectées (bras audessus du moule) jusqu'à la dépose de celles-ci sur la zone de dépose (figures 1-2 et 1.3-a). Le déroulement du cycle est décrit dans le tableau 1.1. Lycée du Hainaut-Valenciennes page 5/10 Version du 12/11/08

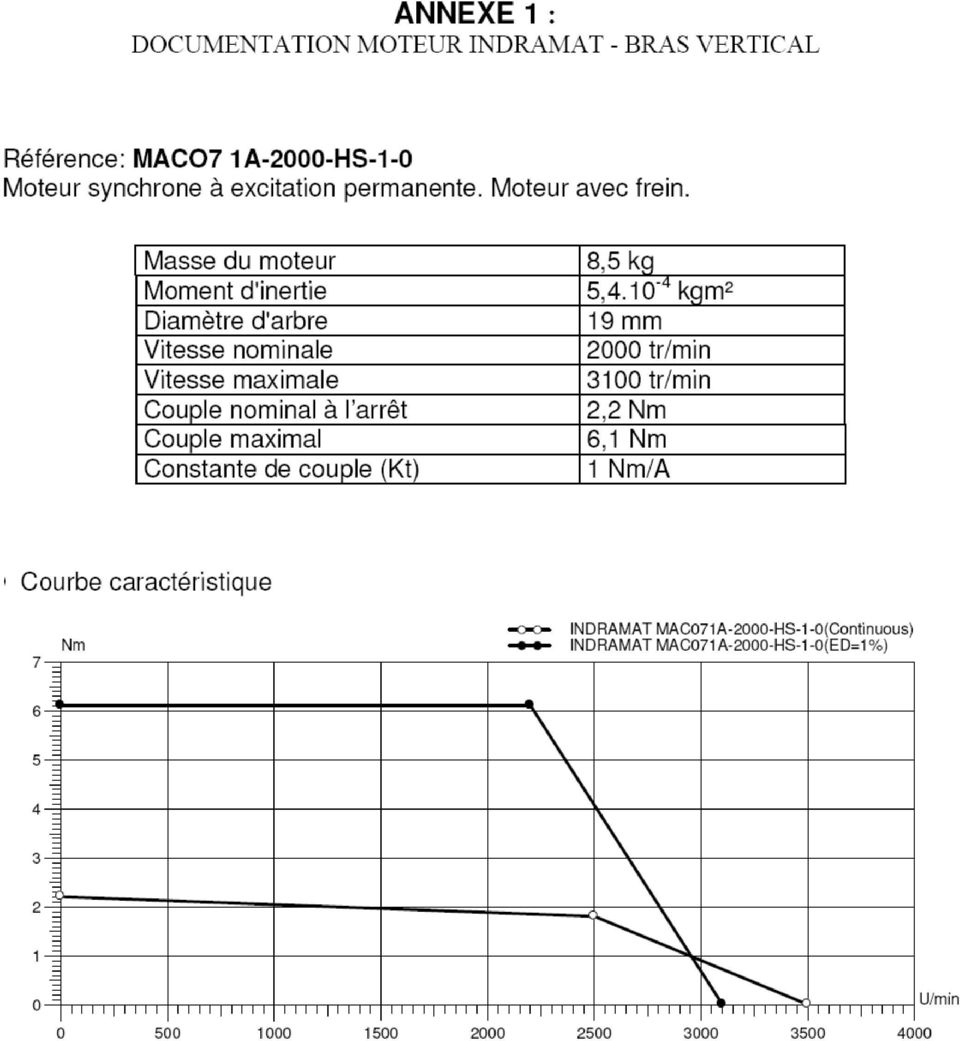
6 La loi de mouvement désirée est définie par la figure 1.3-b. Il s'agit d'une loi de vitesse de type «trapèze» permettant un meilleur comportement thermique du moteur. L'ensemble «moteur et variateur» doit pouvoir supporter le cycle prévu sans échauffement anormal. Classiquement, les constructeurs de moteurs préconisent d'utiliser une règle d'équi-répartition (figure 1.4) des temps d'accélération, de vitesse constante et de décélération : t a = t b = t c. 4.QUESTIONS On donne ci-après le graphe d isolement complet du robot cartésien. On y a fait apparaître : Les chariots X, Y et Z Les différents pignons et crémaillères Les poulies et la courroie de l axe Y La masse embarquée Les actions liées aux moteurs X, Y et Z L action de la pesanteur Les préhenseurs seront considérés immobiles par rapport au chariot Z. Les pièces des réducteurs ne sont pas détaillées. Pignon Arbre sortie réducteur Arbre entrée réducteur Arbre moteur Z Crémaillère Chariot Z Préhenseur Masse embarquée Moteur Z Poulie 2 Courroie crantée Chariot Y Poulie 1 Arbre sortie réducteur Arbre entrée réducteur Bâti 0 Crémaillère Chariot X Moteur Y Arbre moteur Y Moteur X Pesanteur Pignon Arbre sortie réducteur Arbre moteur X Arbre entrée réducteur Lycée du Hainaut-Valenciennes page 6/10 Version du 12/11/08

7 On donne ci-après le détail de la chaîne cinématique de l axe Z faisant apparaître l ensemble des pièces (celles du réducteur comprises) : Réducteur Chariot Y Arbre intermédiaire réducteur A Arbre moteur Z O P K Crémaillère O I Masse embarquée Pignon Chariot Y Arbre entrée réducteur Arbre sortie réducteur Pignon - Crémaillère 4.1. Tracer un nouveau graphe d isolement tenant compte des hypothèses supplémentaires suivantes : Les axes X et Y sont à l arrêt ; L effet de la pesanteur n agit que sur le chariot Z et toutes les pièces qui y sont liées. Toutes les pièces du réducteur de l axe Z sont détaillées L action mécanique développée par le moteur Z est modélisée par le torseur couple suivant : Au niveau du contact pignon-crémaillère en, l action mécanique est modélisée par le torseur : : rayon primitif du pignon Au niveau des engrènements en P et K, les actions mécaniques sont modélisées par : et : rayon primitif du pignon de l arbre d entrée du réducteur : rayon primitif de l arbre intermédiaire du réducteur (coté entrée réducteur) et : rayon primitif du pignon de l arbre de sortie du réducteur : rayon primitif de l arbre intermédiaire du réducteur (coté sortie réducteur) 4.2. Isoler l ensemble et appliquer le théorème de la résultante dynamique en projection sur Isoler l ensemble et appliquer le théorème du moment dynamique en en projection sur Isoler l ensemble et appliquer le théorème du moment dynamique en en projection sur Isoler l ensemble et appliquer le théorème du moment dynamique en en projection sur. Lycée du Hainaut-Valenciennes page 7/10 Version du 12/11/08

8 4.6. Combiner les quatre équations précédentes pour trouver l équation donnant. Mettre en évidence la présence d un couple dynamique et d un couple statique. Montrer que dans l expression de apparaît l inertie équivalente ramenée sur l arbre moteur : Montrer qu on peut écrire sous la forme : Donner l expression de réducteur) (inertie de toutes les pièces du réducteur ramenée sur l arbre d entrée du 4.7. Exprimer pour les trois zones du cycle de vitesse en trapèze défini sur la figure Rem : On présentera les résultats sous la forme d un tableau comme ci-dessous : Zone a b c Expression de 4.8. A partir des caractéristiques du moteur et des données ci-dessous, exprimer puis calculer l accélération maximale atteignable de la pièce dans le cas où la masse embarquée est maximale ainsi que la vitesse maximale atteignable. Pignon-Crémaillère Rayon primitif du pignon Module du pignon Inertie du pignon Moteur MAC071A HS Voir détail en annexe Réducteur Bras Z SP 60 - M Masse totale du chariot mobile Masse d un insert Masse d une ardoise finie Course totale utile Réduction Inertie ramenée sur l arbre d entrée Le robot portique est fourni en standard la presse d'injection. Le dimensionnement des pré-actionneurs et des actionneurs est donc réalisé par le constructeur un cahier des charges défini à priori. Il est donc nécessaire pour I utilisateur de vérifier que les capacités cinématiques et dynamiques des actionneurs seront compatibles les cadences et les caractéristiques des pièces qui sont manipulées. On se propose en outre de minimiser le temps nécessaire pour la réalisation des mouvements du robot. Pour cela, on cherche à travailler le plus souvent possible et Pour la zone a de la loi de vitesse en trapèze, exprimer la position à la date : en fonction de l accélération et de la date. Exprimer la vitesse atteinte en fonction de et. En déduire l expression de en fonction de et. Lorsque la course demandée est trop petite, il n est pas possible d atteindre la vitesse maximale respectant la loi de vitesse définie (règle d'équi-répartition non respectée). tout en Montrer que la course minimale permettant d atteindre est la suivante : Calculer et En déduire les étapes du cycle du bras Z (figure 1.3) qui ne pourront pas respecter ces conditions. Lycée du Hainaut-Valenciennes page 8/10 Version du 12/11/08

9 4.11. Calculer réelle respectant la loi de vitesse en trapèze proposée pour les étapes 1 et 2. En déduire la valeur du couple électromécanique à fournir par le moteur à l accélération (phase a) et à la décélération (phase c) en prenant pour inertie équivalente Calculer atteinte et réelle respectant la loi de vitesse en trapèze proposée pour l étape 5. En déduire la valeur du couple électromécanique à fournir par le moteur à l accélération (phase a) et à la décélération (phase c) Conclure sur les capacités du moteur installé sur l axe Z à faire respecter les cadences demandées. Lycée du Hainaut-Valenciennes page 9/10 Version du 12/11/08
 et à la décélération (phase c). 4.13.")
10
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
Equipement d un forage d eau potable
 Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
Equipement d un d eau potable Mise en situation La Société des Sources de Soultzmatt est une Société d Economie Mixte (SEM) dont l activité est l extraction et l embouteillage d eau de source en vue de
LES CAPTEURS TOUT OU RIEN
 LES CAPTEURS TOUT OU RIEN SOMMAIRE Généralités...3 Caractéristiques générales...4 Les capteurs mécaniques : principe...5 Les capteurs mécaniques : avantages et utilisation...6 Les capteurs mécaniques :
LES CAPTEURS TOUT OU RIEN SOMMAIRE Généralités...3 Caractéristiques générales...4 Les capteurs mécaniques : principe...5 Les capteurs mécaniques : avantages et utilisation...6 Les capteurs mécaniques :
3 - Description et orbite d'un satellite d'observation
 Introduction à la télédétection 3 - Description et orbite d'un satellite d'observation OLIVIER DE JOINVILLE Table des matières I - Description d'un satellite d'observation 5 A. Schéma d'un satellite...5
Introduction à la télédétection 3 - Description et orbite d'un satellite d'observation OLIVIER DE JOINVILLE Table des matières I - Description d'un satellite d'observation 5 A. Schéma d'un satellite...5
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
(51) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L 1/053 (2006.01)
 Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L 1/053 (2006.01)") (19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 1 886 760 A1 (43) Date de publication: 13.02.2008 Bulletin 2008/07 (21) Numéro de dépôt: 0711197.6 (1) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L
(19) (12) DEMANDE DE BREVET EUROPEEN (11) EP 1 886 760 A1 (43) Date de publication: 13.02.2008 Bulletin 2008/07 (21) Numéro de dépôt: 0711197.6 (1) Int Cl.: B23P 19/00 (2006.01) B23P 19/04 (2006.01) F01L
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
RISQUES PROFESSIONNELS RISQUES MÉCANIQUES
 Hygiène Industrielle - Santé au Travail RISQUES PROFESSIONNELS Ingénieurs en Sécurité Industrielle RISQUES MÉCANIQUES I - OÙ SONT PRÉSENTS LES RISQUES MÉCANIQUES?... 1 II - QUELS SONT LES RISQUES?... 2
Hygiène Industrielle - Santé au Travail RISQUES PROFESSIONNELS Ingénieurs en Sécurité Industrielle RISQUES MÉCANIQUES I - OÙ SONT PRÉSENTS LES RISQUES MÉCANIQUES?... 1 II - QUELS SONT LES RISQUES?... 2
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
LE GÉNIE PARASISMIQUE
 LE GÉNIE PARASISMIQUE Concevoir et construire un bâtiment pour qu il résiste aux séismes 1 Présentation de l intervenant Activité : Implantation : B.E.T. structures : Ingénierie générale du bâtiment. Siège
LE GÉNIE PARASISMIQUE Concevoir et construire un bâtiment pour qu il résiste aux séismes 1 Présentation de l intervenant Activité : Implantation : B.E.T. structures : Ingénierie générale du bâtiment. Siège
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
Moto électrique Quantya'"
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2009 Épreuve: étude des constructions Durée : 4 heures Coefficient: 6 Moto électrique Quantya'" AUCUN
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB
 Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
Notice d utilisation de la : Pro-Ject Debut & Debut Phono SB 11 14 11 22 2 1 3 16 17 6 15 1 4 5 8 7 9 20 21 17 9a 3a 25 33 45/78 SPEED 24 10 11 13 12 2 PRO-JECT DEBUT/DEBUT PHONO SB Descriptif du produit
OTIS. Mod. La modernisation réinventée. Plus de sécurité Plus de fiabilité Plus de confort. Et plus d attention à l environnement.
 OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
OTIS Mod La modernisation réinventée Plus de sécurité Plus de fiabilité Plus de confort Et plus d attention à l environnement. GeN2 Mod, un concept novateur. ➍ CÂBLE TRADITIONNEL EN ACIER ➌ ➋ ➌ ➌ POULIE
Le triac en commutation : Commande des relais statiques : Princ ipe électronique
 LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
LES RELAIS STATIQUES (SOLID STATE RELAY : SSR) Princ ipe électronique Les relais statiques sont des contacteurs qui se ferment électroniquement, par une simple commande en appliquant une tension continue
OPTIMISATION À UNE VARIABLE
 OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
OPTIMISATION À UNE VARIABLE Sommaire 1. Optimum locaux d'une fonction... 1 1.1. Maximum local... 1 1.2. Minimum local... 1 1.3. Points stationnaires et points critiques... 2 1.4. Recherche d'un optimum
véhicule hybride (première
 La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
La motorisation d un véhicule hybride (première HERVÉ DISCOURS [1] La cherté et la raréfaction du pétrole ainsi que la sensibilisation du public à l impact de son exploitation sur l environnement conduisent
Annexe I b. Référentiel de certification
 Annexe I b Référentiel de certification Page 15 sur 45 CORRESPONDANCE ENTRE ACTIVITÉS ET COMPÉTENCES ACTIVITÉS ET TÂCHES A1. S ORGANISER, S INTEGRER à une EQUIPE A1-T1 Préparer son intervention et/ou la
Annexe I b Référentiel de certification Page 15 sur 45 CORRESPONDANCE ENTRE ACTIVITÉS ET COMPÉTENCES ACTIVITÉS ET TÂCHES A1. S ORGANISER, S INTEGRER à une EQUIPE A1-T1 Préparer son intervention et/ou la
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE Épreuve de sciences de l ingénieur Session 2013 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un enseignement de spécialité autre
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
L Emballage: Sourcing Stratégique. Badreddine NAOUAR Consultant Indépendant en Achat
 L Emballage: Sourcing Stratégique Badreddine NAOUAR Consultant Indépendant en Achat Sommaire L emballage Définition Fonction de l emballage L utilisation de l emballage Sourcing Stratégique Les Productivités
L Emballage: Sourcing Stratégique Badreddine NAOUAR Consultant Indépendant en Achat Sommaire L emballage Définition Fonction de l emballage L utilisation de l emballage Sourcing Stratégique Les Productivités
LE SYSTÈME GOODS-TO-PERSON ADAPTÉ À LA LOGISTIQUE DE DÉTAIL : MODULAIRE, FLEXIBLE ET ÉVOLUTIF AUTOMATISATION DE LA PRÉPARATION DE COMMANDES
 LE SYSTÈME GOODS-TO-PERSON ADAPTÉ À LA LOGISTIQUE DE DÉTAIL : MODULAIRE, FLEXIBLE ET ÉVOLUTIF AUTOMATISATION DE LA PRÉPARATION POURQUOI CHOISIR SAVOYE... + de 30 ans de savoir-faire au service de la logistique
LE SYSTÈME GOODS-TO-PERSON ADAPTÉ À LA LOGISTIQUE DE DÉTAIL : MODULAIRE, FLEXIBLE ET ÉVOLUTIF AUTOMATISATION DE LA PRÉPARATION POURQUOI CHOISIR SAVOYE... + de 30 ans de savoir-faire au service de la logistique
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F)
") PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
PROGRAMME D HABILETÉS EN FAUTEUIL ROULANT (WSP-F) LIGNES DIRECTRICES POUR LE PARCOURS À OBSTACLES VERSION 4.1 CANADIENNE-FRANÇAISE Les activités d entraînement et d évaluation du WSP-F 4.1 peuvent se dérouler
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
LE SYSTÈME GOODS-TO-PERSON ADAPTÉ À LA LOGISTIQUE DE DÉTAIL : MODULAIRE, FLEXIBLE ET ÉVOLUTIF AUTOMATISATION DE LA PRÉPARATION DE COMMANDES
 LE SYSTÈME GOODS-TO-PERSON ADAPTÉ À LA LOGISTIQUE DE DÉTAIL : MODULAIRE, FLEXIBLE ET ÉVOLUTIF AUTOMATISATION DE LA PRÉPARATION POURQUOI CHOISIR LA DIVISION SAVOYE... + de 30 ans de savoir-faire au service
LE SYSTÈME GOODS-TO-PERSON ADAPTÉ À LA LOGISTIQUE DE DÉTAIL : MODULAIRE, FLEXIBLE ET ÉVOLUTIF AUTOMATISATION DE LA PRÉPARATION POURQUOI CHOISIR LA DIVISION SAVOYE... + de 30 ans de savoir-faire au service
Manuel d'utilisation de la maquette
 Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Manuel d'utilisation de la maquette PANNEAU SOLAIRE AUTO-PILOTE Enseignement au lycée Article Code Panneau solaire auto-piloté 14740 Document non contractuel L'énergie solaire L'énergie solaire est l'énergie
Si la source se rapproche alors v<0 Donc λ- λo <0. La longueur d onde perçue est donc plus petite que si la source était immobile
 Red shift or blue shift, that is the question. a) Quand une source d onde se rapproche d un observateur immobile, la longueur d onde λ perçue par l observateur est-elle plus grande ou plus petite que λo
Red shift or blue shift, that is the question. a) Quand une source d onde se rapproche d un observateur immobile, la longueur d onde λ perçue par l observateur est-elle plus grande ou plus petite que λo
Dreisprung / triple saut. Beat Bollinger 9.8.2012
 Dreisprung / triple saut Beat Bollinger 9.8.2012 v2012 Philosophie de l entraînement Triple saut créer des bases de saut variées! tenir compte des principaux éléments biomécaniques! tenir compte des éléments
Dreisprung / triple saut Beat Bollinger 9.8.2012 v2012 Philosophie de l entraînement Triple saut créer des bases de saut variées! tenir compte des principaux éléments biomécaniques! tenir compte des éléments
(Exemple ici de calcul pour une Ducati 748 biposto, et également pour un S2R1000, équipé d un disque acier en fond de cloche, et ressorts d origine)
") Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
Analyse de la charge transmise aux roulements de la roue dentée, notamment en rajoutant les efforts axiaux dus aux ressorts de l embrayage (via la cloche) (Exemple ici de calcul pour une Ducati 748 biposto,
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
Mesure de la couverture en propre du réseau d un opérateur mobile
 Mesure de la couverture en propre du réseau d un opérateur mobile Janvier Mars 2015 Rapport SOMMAIRE 1 SPECIFICATIONS DE L ENQUETE... 3 1.1 OBJECTIFS ET CONFIGURATION... 3 1.2 OUTIL DE MESURE ET TERMINAUX...
Mesure de la couverture en propre du réseau d un opérateur mobile Janvier Mars 2015 Rapport SOMMAIRE 1 SPECIFICATIONS DE L ENQUETE... 3 1.1 OBJECTIFS ET CONFIGURATION... 3 1.2 OUTIL DE MESURE ET TERMINAUX...
Des solutions emballantes pour le stockage et le transport
 Des solutions emballantes pour le stockage et le transport La solution en manutention plastique Solutions intelligentes Notre force est la mise au point de solutions proches des besoins des clients et
Des solutions emballantes pour le stockage et le transport La solution en manutention plastique Solutions intelligentes Notre force est la mise au point de solutions proches des besoins des clients et
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 5. Le ressort. F ext. F ressort
 Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Chapitre 5 Le ressort Le ressort est un élément fondamental de plusieurs mécanismes. Il existe plusieurs types de ressorts (à boudin, à lame, spiral etc.) Que l on comprime ou étire un ressort, tel que
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Sommaire buses. Buses
 Sommaire buses Buses Pour tous types de machines hautes pression Pour des canalisations jusqu au Ø 600 mm Efficacité maximale Pour toutes sortes d obstruction Radiales ou rotatives Avec ou sans jet avant
Sommaire buses Buses Pour tous types de machines hautes pression Pour des canalisations jusqu au Ø 600 mm Efficacité maximale Pour toutes sortes d obstruction Radiales ou rotatives Avec ou sans jet avant
VOITURE A REACTION. Kart à réaction réalisé par un bricoleur «fou» (Bruce Simpson)
") VOITURE A REACTION Kart à réaction réalisé par un bricoleur «fou» (Bruce Simpson) 1 Introduction BUT DE L ACTIVITE Fabriquer une voiture à réaction originale et sans danger Jouer avec et essayer plein
VOITURE A REACTION Kart à réaction réalisé par un bricoleur «fou» (Bruce Simpson) 1 Introduction BUT DE L ACTIVITE Fabriquer une voiture à réaction originale et sans danger Jouer avec et essayer plein
Le défi : L'avantage Videojet :
 Note d'application Impression-pose d'étiquettes Améliorez votre rendement : passez des applicateurs mécaniques à l'étiquetage Direct Apply TM Le défi : Au cours de ces 20 dernières années, les systèmes
Note d'application Impression-pose d'étiquettes Améliorez votre rendement : passez des applicateurs mécaniques à l'étiquetage Direct Apply TM Le défi : Au cours de ces 20 dernières années, les systèmes
COMMENT FAIRE DES ESCALIERS?
 COMMENT FAIRE DES ESCALIERS? Conception et mise en œuvre GUIDE TECHNIQUE 2012 Union des Métalliers C O L L E CT I O N R E C H E R C H E D É V E LO P P E M E N T M É T I E R 4 INTRODUCTION 13 PARTIE I GÉNÉR
COMMENT FAIRE DES ESCALIERS? Conception et mise en œuvre GUIDE TECHNIQUE 2012 Union des Métalliers C O L L E CT I O N R E C H E R C H E D É V E LO P P E M E N T M É T I E R 4 INTRODUCTION 13 PARTIE I GÉNÉR
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
PHYSIQUE Discipline fondamentale
 Examen suisse de maturité Directives 2003-2006 DS.11 Physique DF PHYSIQUE Discipline fondamentale Par l'étude de la physique en discipline fondamentale, le candidat comprend des phénomènes naturels et
Examen suisse de maturité Directives 2003-2006 DS.11 Physique DF PHYSIQUE Discipline fondamentale Par l'étude de la physique en discipline fondamentale, le candidat comprend des phénomènes naturels et
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Généralités véhicule
 Généralités véhicule GENERALITES DIAGNOSTIC 77 11 303 500 XL0B - XL0C MAI 2001 Edition Française "Les Méthodes de Réparation prescrites par le constructeur, dans ce présent document, sont établies en fonction
Généralités véhicule GENERALITES DIAGNOSTIC 77 11 303 500 XL0B - XL0C MAI 2001 Edition Française "Les Méthodes de Réparation prescrites par le constructeur, dans ce présent document, sont établies en fonction
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Modélisation et Simulation
 Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
Cours de modélisation et simulation p. 1/64 Modélisation et Simulation G. Bontempi Département d Informatique Boulevard de Triomphe - CP 212 http://www.ulb.ac.be/di Cours de modélisation et simulation
TP2 ACTIVITE ITEC. Centre d intérêt : AUBE D UN MIRAGE 2000 COMPORTEMENT D UNE PIECE. Documents : Sujet Projet Dossier technique - Document réponse.
 ACTIVITE ITEC TP2 Durée : 2H Centre d intérêt : COMPORTEMENT D UNE PIECE AUBE D UN MIRAGE 2000 BA133 COMPETENCES TERMINALES ATTENDUES NIVEAU D ACQUISITION 1 2 3 * * Rendre compte de son travail par écrit.
ACTIVITE ITEC TP2 Durée : 2H Centre d intérêt : COMPORTEMENT D UNE PIECE AUBE D UN MIRAGE 2000 BA133 COMPETENCES TERMINALES ATTENDUES NIVEAU D ACQUISITION 1 2 3 * * Rendre compte de son travail par écrit.
Composants du verrou électromagnétique DISPLAY LOCK (FT830 _ FDR_11.10)
") Composants du verrou électromagnétique DISPLAY LOCK (FT830 _ FDR_11.10) Centrales de contrôle d accès autonomes LOCKEA pour contrôler l'ouverture/fermeture de verrous 642a grâce à des badges RFID programmables.
Composants du verrou électromagnétique DISPLAY LOCK (FT830 _ FDR_11.10) Centrales de contrôle d accès autonomes LOCKEA pour contrôler l'ouverture/fermeture de verrous 642a grâce à des badges RFID programmables.
COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS
 1 sur 9 COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS (L'article intégral est paru dans Gestions Hospitalières n 357 de juin-juillet 1996) Pour plus d'informations concernant
1 sur 9 COMMENT MAITRISER LA GESTION DES APPROVISIONNEMENTS ET DES STOCKS DE MEDICAMENTS (L'article intégral est paru dans Gestions Hospitalières n 357 de juin-juillet 1996) Pour plus d'informations concernant
Un partenaire Un partenaire solide
 Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Un partenaire Un partenaire solide Le groupe IMO dont le siège se situe à Gremsdorf dans la région de Nuremberg vous propose plus de 16 années d expérience et d innovations dans le domaine de la fabrication
Les engins roulants, Ecole Paul Salomon 1 / Hélène LEBON ET Madeleine RIVIERE, MS
 Fiche connaissances pour l enseignant Ce qu'il faut savoir. Pour comprendre ce que fait une voiture qui roule il faut comprendre ce qu'est une FORCE. On appelle «force» une action capable de fournir une
Fiche connaissances pour l enseignant Ce qu'il faut savoir. Pour comprendre ce que fait une voiture qui roule il faut comprendre ce qu'est une FORCE. On appelle «force» une action capable de fournir une
CREATING POWER SOLUTIONS. 1D42 1D42C 1D50 1D81 1D81C 1D90 1D90V. Moteurs diesel Hatz. www.hatz-diesel.com
 CREATING POWER SOLUTIONS. 1D42 1D42C 1D81 1D81C 1D90 1D90V Moteurs diesel Hatz www.hatz-diesel.com 1D42C et 1D81C - SilentPack Depuis des décennies, les "Silentpacks" (packs Silence) Hatz posent les jalons
CREATING POWER SOLUTIONS. 1D42 1D42C 1D81 1D81C 1D90 1D90V Moteurs diesel Hatz www.hatz-diesel.com 1D42C et 1D81C - SilentPack Depuis des décennies, les "Silentpacks" (packs Silence) Hatz posent les jalons
1 Problème 1 : L avion solaire autonome (durée 1h)
") Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
Problèmes IPhO 2012 1 NOM : PRENOM : LYCEE : 1 Problème 1 : L avion solaire autonome (durée 1h) Nous souhaitons dans ce problème aborder quelques aspects de la conception d un avion solaire autonome. Les
Mécanique. 1 Forces. 1.1 Rappel. 1.2 Mesurer des forces. 3BC - AL Mécanique 1
 3BC - AL Mécanique 1 Mécanique 1 Forces 1.1 Rappel Pour décrire les effets d une force, nous devons préciser toutes ses propriétés : son point d application ; sa droite d action, c est-à-dire sa direction
3BC - AL Mécanique 1 Mécanique 1 Forces 1.1 Rappel Pour décrire les effets d une force, nous devons préciser toutes ses propriétés : son point d application ; sa droite d action, c est-à-dire sa direction
Catalogue de machines. CNC-Carolo. Edition de juillet 2011
 Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
Catalogue de machines 1/6 La Basic 30x20 : L'accès à la CNC pour débuter Idéale pour la gravure, la découpe de multiplis jusqu'à 5 mm d'épaisseur, la réalisation de circuits imprimés Description : Modèle
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
CENTRAL MEDIA VÉHICULE SOLAIRE PROJET. Réf. KCM 2088. Dossier de MONTAGE. et d'aide à la REALISATION. Version 2.00
 CENTRAL MEDIA PROJET Réf. Dossier de MONTAGE et d'aide à la REALISATION VÉHICULE SOLAIRE Version 2.00 AVANT PROPOS Central Média développe le thème du transport pour les cours de technologie au collège.
CENTRAL MEDIA PROJET Réf. Dossier de MONTAGE et d'aide à la REALISATION VÉHICULE SOLAIRE Version 2.00 AVANT PROPOS Central Média développe le thème du transport pour les cours de technologie au collège.
Un métier pas comme les autres. DES SOLUTIONS INDIVIDUELLES DES SOLUTIONS INDIVIDUELLES. 20 Exemples Des solutions individuelles.
 8 DES SOLUTIONS INDIVIDUELLES 20 Exemples Des solutions individuelles Un métier pas comme les autres. DES SOLUTIONS INDIVIDUELLES Pièces techniques Des solutions individuelles Caissespalettes Bacs pour
8 DES SOLUTIONS INDIVIDUELLES 20 Exemples Des solutions individuelles Un métier pas comme les autres. DES SOLUTIONS INDIVIDUELLES Pièces techniques Des solutions individuelles Caissespalettes Bacs pour
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
association adilca www.adilca.com LE COUPLE MOTEUR
 LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
LE COUPLE MOTEUR Quelles sont les caractéristiques essentielles d un véhicule à moteur? Les services marketing le savent, c est la puissance et la vitesse maximale qui, au premier abord, focalisent l attention
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
La C.A.O (Conception Assistée par Ordinateur). Le logiciel de C.A.O.
. Le logiciel de C.A.O.") CAO1 La C.A.O (Conception Assistée par Ordinateur). Aujourd'hui, lorsque des ingénieurs décident de concevoir un nouveau produit, ils n'utilisent plus de stylo. Les plans sont réalisés sur ordinateur.
CAO1 La C.A.O (Conception Assistée par Ordinateur). Aujourd'hui, lorsque des ingénieurs décident de concevoir un nouveau produit, ils n'utilisent plus de stylo. Les plans sont réalisés sur ordinateur.
CAHIER TECHNIQUE DU JOUEUR DEBUTANT. Billards Américain Pool et Snooker
 CAHIER TECHNIQUE DU JOUEUR DEBUTANT Billards Américain Pool et Snooker CFJ / DTN FFB Edition 2002 Fondée en 1903 Affiliée au Comité National Olympique & Sportif Français Agréée par le Ministère chargé
CAHIER TECHNIQUE DU JOUEUR DEBUTANT Billards Américain Pool et Snooker CFJ / DTN FFB Edition 2002 Fondée en 1903 Affiliée au Comité National Olympique & Sportif Français Agréée par le Ministère chargé
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
PRINCIPE DE FONCTIONNEMENT DU MOTEUR 4 TEMPS
 PRINCIPE DE FONCTIONNEMENT DU MOTEUR 4 TEMPS I:PRINCIPE DE BASE. 1-1:Situation problème. Lorsque nous voulons déplacer un véhicule manuellement, il est plus facile de le déplacer en créant une force sur
PRINCIPE DE FONCTIONNEMENT DU MOTEUR 4 TEMPS I:PRINCIPE DE BASE. 1-1:Situation problème. Lorsque nous voulons déplacer un véhicule manuellement, il est plus facile de le déplacer en créant une force sur
Serrures de porte et composants de retenue de porte
 DOCUMENT DE NORMES TECHNIQUES N o 206, Révision 2R Serrures de porte et composants de retenue de porte Le texte du présent document repose sur la Federal Motor Vehicle Safety Standard No. 206, Door Locks
DOCUMENT DE NORMES TECHNIQUES N o 206, Révision 2R Serrures de porte et composants de retenue de porte Le texte du présent document repose sur la Federal Motor Vehicle Safety Standard No. 206, Door Locks
Roulements à une rangée de billes de génération C. Information Technique Produit
 Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
Roulements à une rangée de billes de génération C Information Technique Produit Sommaire Caractéristiques 2 Avantages des roulements à billes FAG de génération C 2 Etanchéité et lubrification 2 Température
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
49 mm. Pression de fonctionnement min. : dépend des applications. 44 mm. ¾" 1 Températures nominales : voir tableau page 2.
 Sprinkleur basse pression FireLock LP-46 pour entrepôts Ce sprinkleur de stockage a été conçu pour contenir les incendies dans les installations de stockage en racks sur une, deux ou plusieurs rangées,
Sprinkleur basse pression FireLock LP-46 pour entrepôts Ce sprinkleur de stockage a été conçu pour contenir les incendies dans les installations de stockage en racks sur une, deux ou plusieurs rangées,
Actions de réduction de bruit sur un moteur poids lourd
 10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
10 Actions de réduction de bruit sur un moteur poids lourd Laurent Moulin, Renault VI, 99, route de Lyon, 69802 Saint Priest, e-mail : [email protected] D epuis 1974 à aujourd hui, la réglementation
Table des matières. Banc de test 1
 Analyse de fonctionnement du bras de lecture d'un disque dur ( Encore du brassage d'air ) v 1.00 - JP 26/11/2014 Table des matières Banc de test 1 Démontage du disque dur 1 Suppression des éléments inutiles
Analyse de fonctionnement du bras de lecture d'un disque dur ( Encore du brassage d'air ) v 1.00 - JP 26/11/2014 Table des matières Banc de test 1 Démontage du disque dur 1 Suppression des éléments inutiles
Les capteurs et leurs branchements
 bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
bts mi 2 \ COURS\Technologie des capteurs et leurs branchements 1 1. Les Modules Entrées Les capteurs et leurs branchements Module d extension d Entrées/Sorties TOR Module réseau : communication entre
Thème 17: Optimisation
 OPTIMISATION 45 Thème 17: Optimisation Introduction : Dans la plupart des applications, les grandeurs physiques ou géométriques sont exprimées à l aide d une formule contenant une fonction. Il peut s agir
OPTIMISATION 45 Thème 17: Optimisation Introduction : Dans la plupart des applications, les grandeurs physiques ou géométriques sont exprimées à l aide d une formule contenant une fonction. Il peut s agir
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
CHAPITRE. Le mouvement en une dimension CORRIGÉ DES EXERCICES
 CHAPITRE Le mouvement en une dimension CORRIGÉ DES EXERCICES Exercices. Le mouvement rectiligne uniforme SECTION. 5. Le graphique suivant représente la vitesse d une cycliste en fonction du temps. Quelle
CHAPITRE Le mouvement en une dimension CORRIGÉ DES EXERCICES Exercices. Le mouvement rectiligne uniforme SECTION. 5. Le graphique suivant représente la vitesse d une cycliste en fonction du temps. Quelle
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
GUIDE DU TUTEUR ACCUEIL D UN ETUDIANT EN BTS MUC. Management des Unités Commerciales. Stage de 1ère année
 GUIDE DU TUTEUR Ce guide est complété par le tuteur durant la première année de BTS. Une copie doit être fournie au professeur et à l étudiant ACCUEIL D UN ETUDIANT EN BTS MUC Management des Unités Commerciales
GUIDE DU TUTEUR Ce guide est complété par le tuteur durant la première année de BTS. Une copie doit être fournie au professeur et à l étudiant ACCUEIL D UN ETUDIANT EN BTS MUC Management des Unités Commerciales
Mini projet n 1 DOSSIER DE CONCEPTION Clef USB
 Mini projet n 1 DOSSIER DE CONCEPTION Clef USB Dossier de conception 1/21 1. PRESENTATION GENERALE DU MINI PROJET 1.1 Contexte de l étude Situation existante avec un problème. Présentation de l objectif
Mini projet n 1 DOSSIER DE CONCEPTION Clef USB Dossier de conception 1/21 1. PRESENTATION GENERALE DU MINI PROJET 1.1 Contexte de l étude Situation existante avec un problème. Présentation de l objectif