Vision par ordinateur
|
|
|
- Théodore Généreux
- il y a 10 ans
- Total affichages :
Transcription
1 Vision par ordinateur Stéréoscopie multi-vues Frédéric Devernay d'après le cours de Steve Seitz

2 Reconstruction stéréo Étapes Calibrer les cameras Rectifier les images Calculer la disparité Estimer la profondeur X u u f f C baseline C z

3 Choix de la ligne de base (baseline) Grande baseline Petite baseline Quelle est la baseline optimale? Trop petite : grande erreur sur la profondeur Trop grande : mise en correspondance plus difficile

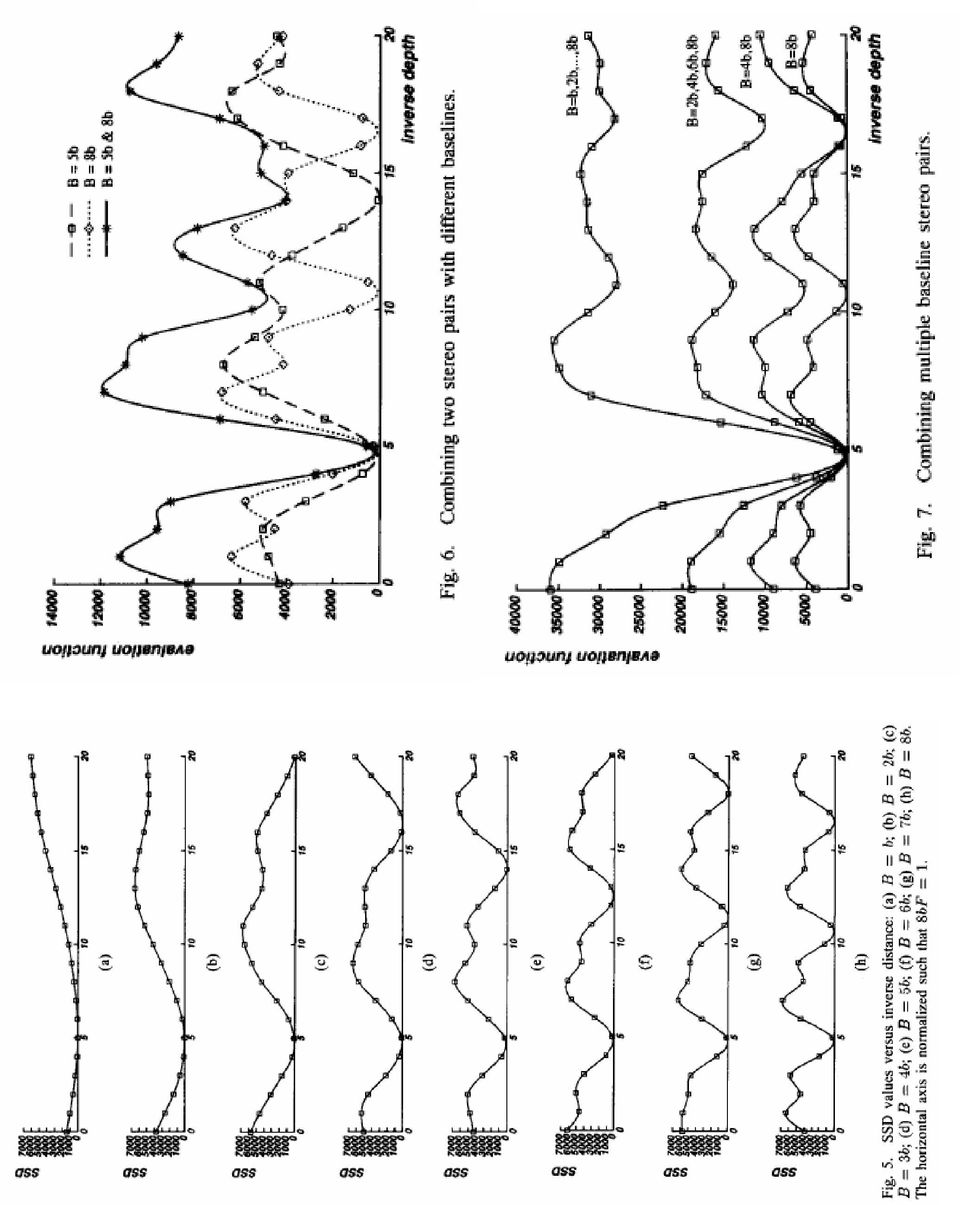
4 Effet de la baseline sur l'estimation de profondeur

5
6 Stéréoscopie multi-baseline Approche de base Choisir une image de référence Utiliser n'importe quel algo de stéréo MAIS > remplacer le critère sur 2 vues par le critère sur toutes les baselines Limitations On doit choisir une image de référence (asymétrique) Les points doivent être visibles sur toutes les images
 Les points doivent être visibles sur toutes les")
7 Système vidéo temps-réel multi-baseline de CMU

8 Stéréo volumétrique Volume de la scène V Images d'entrée (Calibrées) But : Déterminer la radiance des points de V

9 Formulation discrète : coloriage de voxels Volume de la scène discrétisé Images d'entrée (Calibrées) But : Attribuer des valeurs RGBA photo-cohérentes avec les images aux voxels de V

10 Complexité et calculabilité Volume de la scène discrétisé 3 N voxels C couleurs Vraie scène Toutes les scènes (C N3 ) Scènes photocohérentes
 Scènes")
11 Problèmes Questions théoriques Identifier la classe de toutes les scènes photo-cohérentes Questions pratiques Comment calculer les modèles photo-cohérents?

12 Solutions au coloriage de voxels 1. C=2 (silhouettes) Intersection de volumes [Martin 81, Szeliski 93] 2. C non contraint, contraintes sur les points de vue Algorithme de coloriage de voxels [Seitz & Dyer 97] 3. Cas général Space carving (creusage de l'espace) [Kutulakos & Seitz 98]

13 Reconstruction à partir de silhouettes (C = 2) Approche : Rétroprojeter chaque silhouette Intersecter les volumes rétroprojetés

14 Intersection de volumes La reconstruction contient la vraie scène mais n'est pas la même en général Au mieux on obtient l'enveloppe convexe ou plutot le complémentaire de toutes les droites qui n'intersectent pas S

15 Algorithme pour l'intersection de volumes Colorier le voxel en noir s'il est dans la silhouette dans toutes les images O(MN 3 ), pour M images, N 3 voxels Par besoin de tester les 2 N3 scènes possibles!

16 Propriétés de l'intersection de volumes Pour Facile à implanter, rapide Accéléré par l'utilisation d'octrees [Szeliski 1993] Contre Pas de concavités La reconstruction n'est pas photo-cohérente Nécessite l'identification des silhouettes
![[Szeliski 1993] Contre Pas de concavités La reconstruction](/docs-images/58/5302366/images/page_16.jpg "n'est pas photo-cohérente Nécessite l'identification des")
17 Solutions au coloriage de voxels 1. C=2 (silhouettes) Intersection de volumes [Martin 81, Szeliski 93] 2. C non contraint, contraintes sur les points de vue Algorithme de coloriage de voxels [Seitz & Dyer 97] 3. Cas général Space carving (creusage de l'espace) [Kutulakos & Seitz 98]

18 Approche par coloriage de voxel 1. Choisir un voxel 2. Projeter et corréler 3. Colorier si cohérent (écart type des couleurs de pixel sous un seuil) Problème de visibilité : dans quelles images chaque voxel est-il visible?
 Problème de visibilité : dans quelles")
19 Le problème de visibilité globale Quels points sont visibles dans quelles images? Scène connue Scène inconnue Visibilité directe known scene Visibilité inverse known images

20 Ordre de profondeur: ceux qui cachent d'abord Couches Parcours de scène Condition : l'ordre point de vue l'ordre de profondeur doit être indépendant du

21 Ordre indépendant du point de vue Une fonction sur une scène et un volume de caméra Tel que for all p and q in S, v in C cache de seulement si Par exemple : distance au plan de séparation
22 Ordre de profondeur panoramique Caméras orientées dans des directions différentes L'ordre de profondeur utilisant un plan ne fonctionne pas
23 Ordre de profondeur panoramique Les couches vont vers l'extérieur des caméras
24 Ordre de profondeur panoramique Les couches vont vers l'extérieur des caméras
25 Ordre de profondeur panoramique Les couches vont vers l'extérieur des caméras
26 Configurations de caméras compatibles Contraintes d'ordre de profondeur La scène doit être en dehors de l'enveloppe convexe des centres de caméras regard vers l'intérieur cameras above scene regard vers l'extérieur cameras inside scene
27 Acquisition d'images calibrées Images de dinosaure table tournante calibrée 360 rotation (21 images) Images de fleur
28 Résultats de coloriage de voxels reconstruction de dinosaure 72 K voxels coloriés 7.6 M voxels testés 7 min. de calcul sur SGI 250MHz reconstruction de fleur 70 K voxels coloriés 7.6 M voxels testés 7 min. de calcul sur SGI 250MHz
29 Limitations de l'ordre de profondeur Un ordre de profondeur indépendant du point de vue peut ne pas exister p q Besoin d'algorithme s'appliquant au cas général Positions de caméras non contraintes Géométrie / topologie de la scène non contrainte
30 Solutions au coloriage de voxels 1. C=2 (silhouettes) Intersection de volumes [Martin 81, Szeliski 93] 2. C non contraint, contraintes sur les points de vue Algorithme de coloriage de voxels [Seitz & Dyer 97] 3. Cas général Space carving (creusage de l'espace) [Kutulakos & Seitz 98]
31 Algorithme de space carving Image 1 Image N... Algorithme de space carving Initialiser à un volume V contenant la vraie scène Choisir un voxel sur la surface courante Projeter sur les images sur lesquelles il est visible Creuser si non photo-cohérent Répéter jusqu'à convergence
32 Convergence Propriété de cohérence La forme résultant est photo-cohérente > tous les points non cohérents ont été enlevés Propriété de convergence Le creusage converge vers un forme non-vide > un point de la vraie scène n'est jamais enlevé p
33 Qu'est-ce qu'on peut calculer? V V vraie scène enveloppe photo L'enveloppe photo est l'union de toutes les scènes photo-cohérentes dans V C'est une scène photo cohérente Plus petite borne possible sur la vraie scène
34
35 Algorithme de space carving L'algorithme de base est très compliqué Procédure de mise à jour complexe Alternative: Balayage de plan multi-passe Efficace, peut utiliser le texture-mapping hardware Converge rapidement en pratique Facile à implanter Results Algorithm
36 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence True Scene Reconstruction
37 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
38 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
39 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
40 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
41 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
42 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
43 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
44 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
45 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
46 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
47 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
48 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
49 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
50 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
51 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
52 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
53 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
54 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
55 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
56 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
57 Balayage de plan multi-passe Balayer par un plan dans les 6 directions principales N'utiliser que les caméras d'un côté du plan Répéter jusqu'à convergence
58 Résultats de space carving : violette africaine Image d'entrée (1 sur 45) Reconstruction Reconstruction Reconstruction
59 Résultats de space carving : main Image d'entrée (1 sur 100) Vues de la reconstruction
60 Ballade dans la maison En entrée : 24 vues générées de l'intérieur et de l'extérieur
61 Résultats de space carving : maison Image d'entrée (vraie scène) Reconstruction 370,000 voxels
62 Résultats de space carving : maison Image d'entrée (vraie scène) Reconstruction 370,000 voxels
63 Résultats de space carving : maison autre vue (vraie scène) Reconstruction autre vue (vraie scène) Reconstruction Reconstruction (en utilisant l'autre vue)
64 Autres caractéristiques Reconstruction grossière puis fine Representation de la scène comme un octree Reconstruction du modèle basse résolution d'abord, puis affiner Accélération matérielle Utilisation du texture-mapping pour la projection des voxels Voxels traités plan par plan Limitations Acquisition d'images calibrées Restriction à des modèles de radiance simples Biais vers les reconstructions maximales (plus grosses) Pas de transparence
65 Autres approches Ensembles de niveau [Faugeras & Keriven 1998] Évolution d'une fonction implicite par résolution d'edp Transparence [Szeliski & Golland 1998] Calcul des voxels avec une composante alpha Flot maximal/coupure minimale [Roy & Cox 1998] Formulation utilisant la théorie des graphes Stéréo basée sur un maillage [Fua & Leclerc 95] Basée sur un maillage mais même notion de cohérence Virtualized Reality [Narayan, Rander, Kanade 1998] Stéréo sur de multiples triplets, fusion des résultats
66 Stéréo par ensembles de niveau Stéréo par minimisation d'énergie Première idée : meilleur surface S(u,v) qui correspond aux images C'est un problème de minimisation variationnel > déformations infinitésimale d'une surface > deformation par équations d'euler-lagrange Problème : et si l'objet n'a pas une surface unique Utilisation de la formulation par ensembles de niveau > la surface de la scène est est une fonction "distance signée" à la surface > on fait évoluer par une EDP, plutôt que > permet de gérer des topologies complexes
67 Stéréo par ensembles de niveau : résultats
68 Bibliographie Intersection de volumes Martin & Aggarwal, Volumetric description of objects from multiple views, Trans. Pattern Analysis and Machine Intelligence, 5(2), 1991, pp Szeliski, Rapid Octree Construction from Image Sequences, Computer Vision, Graphics, and Image Processing: Image Understanding, 58(1), 1993, pp Coloriage de voxels et space carving Seitz & Dyer, Photorealistic Scene Reconstruction by Voxel Coloring, Proc. Computer Vision and Pattern Recognition (CVPR), 1997, pp Seitz & Kutulakos, Plenoptic Image Editing, Proc. Int. Conf. on Computer Vision (ICCV), 1998, pp Kutulakos & Seitz, A Theory of Shape by Space Carving, Proc. ICCV, 1998, pp
69 Bibliographie Autres méthodes Bolles, Baker, and Marimont, Epipolar-Plane Image Analysis: An Approach to Determining Structure from Motion, International Journal of Computer Vision, vol 1, no 1, 1987, pp Faugeras & Keriven, Variational principles, surface evolution, PDE's, level set methods and the stereo problem", IEEE Trans. on Image Processing, 7(3), 1998, pp Szeliski & Golland, Stereo Matching with Transparency and Matting, Proc. Int. Conf. on Computer Vision (ICCV), 1998, Roy & Cox, A Maximum-Flow Formulation of the N-camera Stereo Correspondence Problem, Proc. ICCV, 1998, pp Fua & Leclerc, Object-centered surface reconstruction: Combining multi-image stereo and shading", International Journal of Computer Vision, 16, 1995, pp Narayanan, Rander, & Kanade, Constructing Virtual Worlds Using Dense Stereo, Proc. ICCV, 1998, pp
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré
 Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré Pierre Rolin Marie-Odile Berger Frédéric Sur LORIA, UMR CNRS 7503, Université de Lorraine INRIA Nancy Grand
Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré Pierre Rolin Marie-Odile Berger Frédéric Sur LORIA, UMR CNRS 7503, Université de Lorraine INRIA Nancy Grand
modélisation solide et dessin technique
 CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
Introduction. I Étude rapide du réseau - Apprentissage. II Application à la reconnaissance des notes.
 Introduction L'objectif de mon TIPE est la reconnaissance de sons ou de notes de musique à l'aide d'un réseau de neurones. Ce réseau doit être capable d'apprendre à distinguer les exemples présentés puis
Introduction L'objectif de mon TIPE est la reconnaissance de sons ou de notes de musique à l'aide d'un réseau de neurones. Ce réseau doit être capable d'apprendre à distinguer les exemples présentés puis
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Analyse d images. [email protected]. Edmond Boyer UFRIMA 1
 Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images [email protected] Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
VISUALISATION DE NUAGES DE POINTS
 ARNAUD BLETTERER MULTI-RÉSOLUTION 1/16 VISUALISATION DE NUAGES DE POINTS MULTI-RÉSOLUTION AU TRAVERS DE CARTES DE PROFONDEUR Arnaud Bletterer Université de Nice Sophia Antipolis Laboratoire I3S - Cintoo
ARNAUD BLETTERER MULTI-RÉSOLUTION 1/16 VISUALISATION DE NUAGES DE POINTS MULTI-RÉSOLUTION AU TRAVERS DE CARTES DE PROFONDEUR Arnaud Bletterer Université de Nice Sophia Antipolis Laboratoire I3S - Cintoo
FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE
 Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Détection et suivi d'objets dans une séquence d'images par contours actifs
 Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Reaper : utilisations avancées
 Reaper : utilisations avancées Reaper dispose de ressources qui, sans être cachées, ne sont pas toujours faciles à trouver, d'autant plus que souvent on n'imagine même pas que ces choses soient possible!...
Reaper : utilisations avancées Reaper dispose de ressources qui, sans être cachées, ne sont pas toujours faciles à trouver, d'autant plus que souvent on n'imagine même pas que ces choses soient possible!...
Développement mobile MIDP 2.0 Mobile 3D Graphics API (M3G) JSR 184. Frédéric BERTIN [email protected]
 JSR 184. Frédéric BERTIN fbertin@neotilus.com") Développement mobile MIDP 2.0 Mobile 3D Graphics API (M3G) JSR 184 Frédéric BERTIN [email protected] Présentaion : Mobile 3D Graphics API JSR 184 M3G :présentation Package optionnel de l api J2ME. Prend
Développement mobile MIDP 2.0 Mobile 3D Graphics API (M3G) JSR 184 Frédéric BERTIN [email protected] Présentaion : Mobile 3D Graphics API JSR 184 M3G :présentation Package optionnel de l api J2ME. Prend
Pourquoi l apprentissage?
 Pourquoi l apprentissage? Les SE sont basés sur la possibilité d extraire la connaissance d un expert sous forme de règles. Dépend fortement de la capacité à extraire et formaliser ces connaissances. Apprentissage
Pourquoi l apprentissage? Les SE sont basés sur la possibilité d extraire la connaissance d un expert sous forme de règles. Dépend fortement de la capacité à extraire et formaliser ces connaissances. Apprentissage
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Chp. 4. Minimisation d une fonction d une variable
 Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
Chp. 4. Minimisation d une fonction d une variable Avertissement! Dans tout ce chapître, I désigne un intervalle de IR. 4.1 Fonctions convexes d une variable Définition 9 Une fonction ϕ, partout définie
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale
 R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
Géométrie Algorithmique Plan du cours
 Plan du cours Introduction Triangulation de polygones Recherche/localisation Diagrammes de Voronoï Triangulation de Delaunay Arbres de partition binaire 1 Intersection de segments de droite Intersection
Plan du cours Introduction Triangulation de polygones Recherche/localisation Diagrammes de Voronoï Triangulation de Delaunay Arbres de partition binaire 1 Intersection de segments de droite Intersection
PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES
 Leçon 11 PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES Dans cette leçon, nous retrouvons le problème d ordonnancement déjà vu mais en ajoutant la prise en compte de contraintes portant sur les ressources.
Leçon 11 PROBLEMES D'ORDONNANCEMENT AVEC RESSOURCES Dans cette leçon, nous retrouvons le problème d ordonnancement déjà vu mais en ajoutant la prise en compte de contraintes portant sur les ressources.
Algorithmes de recherche
 Algorithmes de recherche 1 Résolution de problèmes par recherche On représente un problème par un espace d'états (arbre/graphe). Chaque état est une conguration possible du problème. Résoudre le problème
Algorithmes de recherche 1 Résolution de problèmes par recherche On représente un problème par un espace d'états (arbre/graphe). Chaque état est une conguration possible du problème. Résoudre le problème
Compte rendu des TP matlab
 Compte rendu des TP matlab Krell Stella, Minjeaud Sebastian 18 décembre 006 1 TP1, Discrétisation de problèmes elliptiques linéaires 1d Soient > 0, a R, b 0, c, d R et f C([0, 1], R). On cerce à approcer
Compte rendu des TP matlab Krell Stella, Minjeaud Sebastian 18 décembre 006 1 TP1, Discrétisation de problèmes elliptiques linéaires 1d Soient > 0, a R, b 0, c, d R et f C([0, 1], R). On cerce à approcer
Introduction : Cadkey
 Introduction Cadkey Cadkey est un logiciel de dessin assisté par ordinateur. La fenêtre du logiciel devrait ressembler à quelque chose comme suit: Le menu supérieur: Redraw Autoscale Efface Modifier les
Introduction Cadkey Cadkey est un logiciel de dessin assisté par ordinateur. La fenêtre du logiciel devrait ressembler à quelque chose comme suit: Le menu supérieur: Redraw Autoscale Efface Modifier les
http ://www.labri.fr/perso/bugeau/
 Aurélie Bugeau Etat civil Date de Naissance 17 septembre 1982 à Nantes (44) Nationalité Française Situation familiale Mariée, deux enfants Adresse professionnelle LaBRI, Université Bordeaux, 351 cours
Aurélie Bugeau Etat civil Date de Naissance 17 septembre 1982 à Nantes (44) Nationalité Française Situation familiale Mariée, deux enfants Adresse professionnelle LaBRI, Université Bordeaux, 351 cours
Monitoring elderly People by Means of Cameras
 Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE
 AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
AOMS : UN NOUVEL OUTIL DE PHOTOGRAMMÉTRIE A. Dumont, F. Jallon et JB. Monnerie ESIC SN Z.A. du buisson de la couldre 1 Allée des Châtaigniers - F78190 TRAPPES S. Naudet, P. Sayd et M. Viala * LETI (CEA
Dans cette définition, il y a trois notions clés: documents, requête, pertinence.
 Introduction à la RI 1. Définition Un système de recherche d'information (RI) est un système qui permet de retrouver les documents pertinents à une requête d'utilisateur, à partir d'une base de documents
Introduction à la RI 1. Définition Un système de recherche d'information (RI) est un système qui permet de retrouver les documents pertinents à une requête d'utilisateur, à partir d'une base de documents
F210. Automate de vision hautes fonctionnalités. Caractèristiques. Algorithmes vectoriels
 Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
Automate de vision hautes fonctionnalités Caractèristiques Algorithmes vectoriels Les algorithmes permettent de sélectionner les éléments de traitement requis dans la bibliothèque, puis les combinent et
TITRE PARTIE TITRE SECTION. Faire des anaglyphes avec CatiaV5
 TITRE PARTIE TITRE SECTION Faire des anaglyphes avec CatiaV5 1 SOMMAIRE SOMMAIRE 1. QU'EST-CE QU'UN ANAGLYPHE? 3 2. LES LOGICIELS A INSTALLER 5 3. CREATION D'UN ANAGLYPHE FIXE 6 4. CREATION D'UN ANAGLYPHE
TITRE PARTIE TITRE SECTION Faire des anaglyphes avec CatiaV5 1 SOMMAIRE SOMMAIRE 1. QU'EST-CE QU'UN ANAGLYPHE? 3 2. LES LOGICIELS A INSTALLER 5 3. CREATION D'UN ANAGLYPHE FIXE 6 4. CREATION D'UN ANAGLYPHE
I- USBKey Transfer. Guide d u5lisa5on. Comment u)liser I- USBKey Transfer?
liser I- USBKey Transfer?") I- USBKey Transfer Guide d u5lisa5on Comment u)liser I- USBKey Transfer? 1 I- USBKey Transfer Guide d u5lisa5on - Supprimer - Copier - Déplacer 1. Comment copier les fichiers (musique, vidéo, photos, etc.)
I- USBKey Transfer Guide d u5lisa5on Comment u)liser I- USBKey Transfer? 1 I- USBKey Transfer Guide d u5lisa5on - Supprimer - Copier - Déplacer 1. Comment copier les fichiers (musique, vidéo, photos, etc.)
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
Toolbox d étalonnage pour Kinect : Application à la fusion d une Kinect et d un télémètre laser
 Toolbox d étalonnage pour Kinect : Application à la fusion d une Kinect et d un télémètre laser Jean-Clément Devaux, Hicham Hadj-Abdelkader, Etienne Colle To cite this version: Jean-Clément Devaux, Hicham
Toolbox d étalonnage pour Kinect : Application à la fusion d une Kinect et d un télémètre laser Jean-Clément Devaux, Hicham Hadj-Abdelkader, Etienne Colle To cite this version: Jean-Clément Devaux, Hicham
Partie II Cours 3 (suite) : Sécurité de bases de données
 : Sécurité de bases de données") Partie II Cours 3 (suite) : Sécurité de bases de données ESIL Université de la méditerranée [email protected] http://odile.papini.perso.esil.univmed.fr/sources/ssi.html Plan du cours 1 Introduction
Partie II Cours 3 (suite) : Sécurité de bases de données ESIL Université de la méditerranée [email protected] http://odile.papini.perso.esil.univmed.fr/sources/ssi.html Plan du cours 1 Introduction
ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS
 MAHER HANAFI ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS Mémoire présenté à la Faculté des études supérieures et postdoctorales de l Université Laval dans le cadre
MAHER HANAFI ANALYSE DU MOUVEMENT HUMAIN PAR VISION ARTIFICIELLE POUR CONSOLES DE JEUX VIDÉOS Mémoire présenté à la Faculté des études supérieures et postdoctorales de l Université Laval dans le cadre
pcon.planner 6 Préparer et présenter une implantation en toute simplicité
 pcon.planner 6 Préparer et présenter une implantation en toute simplicité Sommaire 1. Installation :... 3 2. Démarrer le logiciel :... 3 3. Interface :... 3 4. Naviguer :... 4 5. Réaliser une implantation
pcon.planner 6 Préparer et présenter une implantation en toute simplicité Sommaire 1. Installation :... 3 2. Démarrer le logiciel :... 3 3. Interface :... 3 4. Naviguer :... 4 5. Réaliser une implantation
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
La visio-conférence holographique : Pourquoi? Comment?
 La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
La visio-conférence holographique : Pourquoi? Comment? Francis Felix Labo LSIS / Arts & Métiers Paritech (ENSAM) 2 Cours des Arts et Métiers 13100 Aix-en-Provence Thierry Henocque AIP-Primeca Dauphiné
Mathématique et Automatique : de la boucle ouverte à la boucle fermée. Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans
 Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans [email protected] Plan 1. Un peu de
Mathématique et Automatique : de la boucle ouverte à la boucle fermée Maïtine bergounioux Laboratoire MAPMO - UMR 6628 Université d'orléans [email protected] Plan 1. Un peu de
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Tutoriel première utilisation ICEM-CFD. Couche limite et modification du maillage en 2D
 Tutoriel première utilisation ICEM-CFD Couche limite et modification du maillage en 2D Création de points, lignes, surfaces, ajout d un trou à la surface pour simuler le comportement de l écoulement autour
Tutoriel première utilisation ICEM-CFD Couche limite et modification du maillage en 2D Création de points, lignes, surfaces, ajout d un trou à la surface pour simuler le comportement de l écoulement autour
Renforcement des trois compétences : compréhension orale, expression orale et expression écrite à partir de documents et vidéos.
 Master Mathématiques et Applications Spécialité : Ingénierie mathématique et modélisation Parcours : Mathématique et Informatique : Statistique, Signal, Santé (MI3S) 2015-2016 RÉSUMÉ DES COURS : (dernière
Master Mathématiques et Applications Spécialité : Ingénierie mathématique et modélisation Parcours : Mathématique et Informatique : Statistique, Signal, Santé (MI3S) 2015-2016 RÉSUMÉ DES COURS : (dernière
Carte IEEE 1394. Version 1.0
 Carte IEEE 1394 Version 1.0 Table des Matières 1.0 Qu'est-ce que l IEEE1394. P.2 2.0 Caractéristiques de la carte 1394 P.2 3.0 Configuration du Système...P.2 4.0 Informations Techniques...P. 3 5.0 Installation
Carte IEEE 1394 Version 1.0 Table des Matières 1.0 Qu'est-ce que l IEEE1394. P.2 2.0 Caractéristiques de la carte 1394 P.2 3.0 Configuration du Système...P.2 4.0 Informations Techniques...P. 3 5.0 Installation
Opérations de base sur ImageJ
 Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Opérations de base sur ImageJ TPs d hydrodynamique de l ESPCI, J. Bico, M. Reyssat, M. Fermigier ImageJ est un logiciel libre, qui fonctionne aussi bien sous plate-forme Windows, Mac ou Linux. Initialement
Baccalauréat ES Pondichéry 7 avril 2014 Corrigé
 Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
Baccalauréat ES Pondichéry 7 avril 204 Corrigé EXERCICE 4 points Commun à tous les candidats. Proposition fausse. La tangente T, passant par les points A et B d abscisses distinctes, a pour coefficient
E-Biothon : Une plate-forme pour accélérer les recherches en biologie, santé et environnement.
 E-Biothon : Une plate-forme pour accélérer les recherches en biologie, santé et environnement. N.Bard, S.Boin, F.Bothorel, P.Collinet, M.Daydé, B. Depardon, F. Desprez, M.Flé, A.Franc, J.-F. Gibrat, D.
E-Biothon : Une plate-forme pour accélérer les recherches en biologie, santé et environnement. N.Bard, S.Boin, F.Bothorel, P.Collinet, M.Daydé, B. Depardon, F. Desprez, M.Flé, A.Franc, J.-F. Gibrat, D.
CHAPITRE VIII : Les circuits avec résistances ohmiques
 CHAPITRE VIII : Les circuits avec résistances ohmiques VIII. 1 Ce chapitre porte sur les courants et les différences de potentiel dans les circuits. VIII.1 : Les résistances en série et en parallèle On
CHAPITRE VIII : Les circuits avec résistances ohmiques VIII. 1 Ce chapitre porte sur les courants et les différences de potentiel dans les circuits. VIII.1 : Les résistances en série et en parallèle On
IFO. Soleil. Antoine COUSYN 29/07/2012 08/02/2015. Vidéo. Manipur, Inde. Saturation du capteur CMOS. 19 Juin 2011. 15h11 heure locale.
 Rapport d expertise IPACO Nom de l expert Antoine COUSYN Date du rapport 29/07/2012 Dernière mise à jour 08/02/2015 Type IFO Classe A Explication Saturation du capteur CMOS Complément Soleil Document Lieu
Rapport d expertise IPACO Nom de l expert Antoine COUSYN Date du rapport 29/07/2012 Dernière mise à jour 08/02/2015 Type IFO Classe A Explication Saturation du capteur CMOS Complément Soleil Document Lieu
LE PROBLEME DU PLUS COURT CHEMIN
 LE PROBLEME DU PLUS COURT CHEMIN Dans cette leçon nous définissons le modèle de plus court chemin, présentons des exemples d'application et proposons un algorithme de résolution dans le cas où les longueurs
LE PROBLEME DU PLUS COURT CHEMIN Dans cette leçon nous définissons le modèle de plus court chemin, présentons des exemples d'application et proposons un algorithme de résolution dans le cas où les longueurs
Création intuitive des éléments d un paysage
 Création intuitive des éléments d un paysage Marie-Paule Cani Univ. Grenoble-Alpes, CNRS & Inria Organisation du cours «Façonner l imaginaire» Partie 1 : Création numérique 3D Modélisation géométrique
Création intuitive des éléments d un paysage Marie-Paule Cani Univ. Grenoble-Alpes, CNRS & Inria Organisation du cours «Façonner l imaginaire» Partie 1 : Création numérique 3D Modélisation géométrique
PX8048 Convertisseur audio/vidéo VHS vers USB
 PX8048 Convertisseur audio/vidéo VHS vers USB 1 Convertisseur audio/vidéo VHS vers USB Guide d'installation rapide Le convertisseur vidéo/audio EasyCAP USB 2.0 convertit des enregistrements vidéo et audio
PX8048 Convertisseur audio/vidéo VHS vers USB 1 Convertisseur audio/vidéo VHS vers USB Guide d'installation rapide Le convertisseur vidéo/audio EasyCAP USB 2.0 convertit des enregistrements vidéo et audio
CHAPITRE IX : Les appareils de mesures électriques
 CHAPITRE IX : Les appareils de mesures électriques IX. 1 L'appareil de mesure qui permet de mesurer la différence de potentiel entre deux points d'un circuit est un voltmètre, celui qui mesure le courant
CHAPITRE IX : Les appareils de mesures électriques IX. 1 L'appareil de mesure qui permet de mesurer la différence de potentiel entre deux points d'un circuit est un voltmètre, celui qui mesure le courant
Dense Reconstruction Method s for Active Vision
 Méthodes de Reconstruction Denses pour la Vision Active Dense Reconstruction Method s for Active Vision par Emmanuelle CLERGUE et Thierry VIÉVILL E INRIA, Unité de Recherche de Sophia-Antipolis 2004, route
Méthodes de Reconstruction Denses pour la Vision Active Dense Reconstruction Method s for Active Vision par Emmanuelle CLERGUE et Thierry VIÉVILL E INRIA, Unité de Recherche de Sophia-Antipolis 2004, route
SERRURE ÉLECTRONIQUE À PÊNE DORMANT
 Marquez un cercle de 1 po (25.4 mm) de diamètre au centre du bord de la porte. 2" 1-3/4" 1-9/16" 1-3/8" 51 45 40 35 POUR DISTANCE D'ENTRÉE de 2-3/8 po ( 60mm ) Pliez ce gabarit sur la ligne pointillée
Marquez un cercle de 1 po (25.4 mm) de diamètre au centre du bord de la porte. 2" 1-3/4" 1-9/16" 1-3/8" 51 45 40 35 POUR DISTANCE D'ENTRÉE de 2-3/8 po ( 60mm ) Pliez ce gabarit sur la ligne pointillée
Matériel & Logiciels (Hardware & Software)
") CHAPITRE 2 HARDWARE & SOFTWARE P. 1 Chapitre 2 Matériel & Logiciels (Hardware & Software) 2.1 Matériel (Hardware) 2.1.1 Présentation de l'ordinateur Un ordinateur est un ensemble de circuits électronique
CHAPITRE 2 HARDWARE & SOFTWARE P. 1 Chapitre 2 Matériel & Logiciels (Hardware & Software) 2.1 Matériel (Hardware) 2.1.1 Présentation de l'ordinateur Un ordinateur est un ensemble de circuits électronique
Recherche De Coalescences Binaires Étalonnage Du Détecteur
 Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Projet : Recalage par maximisation de l information mutuelle
 École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
La méthode des éléments finis et le contrôle des calculs
 Table des matières Techniques Avancées en Calcul des Structures Cours d option La méthode des éléments finis et le contrôle des calculs J.-P. Pelle ENS - Cachan Master MIS Parcours TACS Année universitaire
Table des matières Techniques Avancées en Calcul des Structures Cours d option La méthode des éléments finis et le contrôle des calculs J.-P. Pelle ENS - Cachan Master MIS Parcours TACS Année universitaire
L'univers simple des appareils intelligents
 L'univers simple des appareils intelligents Merci d'avoir choisi le HUAWEI Mobile WiFi Les fonctions prises en charge et l'apparence dépendent du modèle que vous avez acheté. Les illustrations suivantes
L'univers simple des appareils intelligents Merci d'avoir choisi le HUAWEI Mobile WiFi Les fonctions prises en charge et l'apparence dépendent du modèle que vous avez acheté. Les illustrations suivantes
Correction du baccalauréat ES/L Métropole 20 juin 2014
 Correction du baccalauréat ES/L Métropole 0 juin 014 Exercice 1 1. c.. c. 3. c. 4. d. 5. a. P A (B)=1 P A (B)=1 0,3=0,7 D après la formule des probabilités totales : P(B)=P(A B)+P(A B)=0,6 0,3+(1 0,6)
Correction du baccalauréat ES/L Métropole 0 juin 014 Exercice 1 1. c.. c. 3. c. 4. d. 5. a. P A (B)=1 P A (B)=1 0,3=0,7 D après la formule des probabilités totales : P(B)=P(A B)+P(A B)=0,6 0,3+(1 0,6)
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
Formula Negator, Outil de négation de formule.
 Formula Negator, Outil de négation de formule. Aymerick Savary 1,2, Mathieu Lassale 1,2, Jean-Louis Lanet 1 et Marc Frappier 2 1 Université de Limoges 2 Université de Sherbrooke Résumé. Cet article présente
Formula Negator, Outil de négation de formule. Aymerick Savary 1,2, Mathieu Lassale 1,2, Jean-Louis Lanet 1 et Marc Frappier 2 1 Université de Limoges 2 Université de Sherbrooke Résumé. Cet article présente
MCMC et approximations en champ moyen pour les modèles de Markov
 MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
Filière MMIS. Modélisation Mathématique, Images et Simulation. Responsables : Stefanie Hahmann, Valérie Perrier, Zoltan Szigeti
 Filière MMIS Modélisation Mathématique, Images et Simulation Responsables : Stefanie Hahmann, Valérie Perrier, Zoltan Szigeti [email protected] Modélisation mathématique, Images et simulation (MMIS)
Filière MMIS Modélisation Mathématique, Images et Simulation Responsables : Stefanie Hahmann, Valérie Perrier, Zoltan Szigeti [email protected] Modélisation mathématique, Images et simulation (MMIS)
Optimisation, traitement d image et éclipse de Soleil
 Kléber, PCSI1&3 014-015 I. Introduction 1/8 Optimisation, traitement d image et éclipse de Soleil Partie I Introduction Le 0 mars 015 a eu lieu en France une éclipse partielle de Soleil qu il était particulièrement
Kléber, PCSI1&3 014-015 I. Introduction 1/8 Optimisation, traitement d image et éclipse de Soleil Partie I Introduction Le 0 mars 015 a eu lieu en France une éclipse partielle de Soleil qu il était particulièrement
Chapitre 5 : Flot maximal dans un graphe
 Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Graphes et RO TELECOM Nancy A Chapitre 5 : Flot maximal dans un graphe J.-F. Scheid 1 Plan du chapitre I. Définitions 1 Graphe Graphe valué 3 Représentation d un graphe (matrice d incidence, matrice d
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Master IMA - UMPC Paris 6 RDMM - Année 2009-2010 Fiche de TP
 Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Master IMA - UMPC Paris 6 RDMM - Année 2009-200 Fiche de TP Préliminaires. Récupérez l archive du logiciel de TP à partir du lien suivant : http://www.ensta.fr/~manzaner/cours/ima/tp2009.tar 2. Développez
Equation LIDAR : exp 2 Equation RADAR :
 Contexte scientifique Systèmes LIDAR/RADAR Equation LIDAR : exp Equation RADAR : p (r) : puissance rétrodiffusée r : altitude ou profondeur. C : constante instrumentale. β : coefficient de rétrodiffusion
Contexte scientifique Systèmes LIDAR/RADAR Equation LIDAR : exp Equation RADAR : p (r) : puissance rétrodiffusée r : altitude ou profondeur. C : constante instrumentale. β : coefficient de rétrodiffusion
Le Langage De Description De Données(LDD)
") Base de données Le Langage De Description De Données(LDD) Créer des tables Décrire les différents types de données utilisables pour les définitions de colonne Modifier la définition des tables Supprimer,
Base de données Le Langage De Description De Données(LDD) Créer des tables Décrire les différents types de données utilisables pour les définitions de colonne Modifier la définition des tables Supprimer,
Comme chaque ligne de cache a 1024 bits. Le nombre de lignes de cache contenu dans chaque ensemble est:
 Travaux Pratiques 3. IFT 1002/IFT 1005. Structure Interne des Ordinateurs. Département d'informatique et de génie logiciel. Université Laval. Hiver 2012. Prof : Bui Minh Duc. Tous les exercices sont indépendants.
Travaux Pratiques 3. IFT 1002/IFT 1005. Structure Interne des Ordinateurs. Département d'informatique et de génie logiciel. Université Laval. Hiver 2012. Prof : Bui Minh Duc. Tous les exercices sont indépendants.
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Smatrix. Le système de réglage intelligent de chauffage et de refroidissement sol Plus de confort avec moins d'énergie
 Smatrix Le système de réglage intelligent de chauffage et de refroidissement sol Plus de confort avec moins d'énergie 02 l Uponor Smatrix Uponor Smatrix : optimise la climatisation intérieure, la gestion
Smatrix Le système de réglage intelligent de chauffage et de refroidissement sol Plus de confort avec moins d'énergie 02 l Uponor Smatrix Uponor Smatrix : optimise la climatisation intérieure, la gestion
Francis BISSON (06 794 819) Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) IFT702 Planification en intelligence artificielle
 Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) IFT702 Planification en intelligence artificielle") Francis BISSON (06 794 819) Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) PLANIFICATION DE TÂCHES DANS MS PROJECT IFT702 Planification en intelligence artificielle Présenté à M. Froduald KABANZA
Francis BISSON (06 794 819) Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) PLANIFICATION DE TÂCHES DANS MS PROJECT IFT702 Planification en intelligence artificielle Présenté à M. Froduald KABANZA
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Fête de la science Initiation au traitement des images
 Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Fête de la science Initiation au traitement des images Détection automatique de plaques minéralogiques à partir d'un téléphone portable et atelier propose de créer un programme informatique pour un téléphone
Rendu temps réel de mer et de nuages
 Rendu temps réel de mer et de nuages Linares Antonin, Boyer Julien 17 décembre 2008 1 Résumé Nous allons traiter dans ce document les différentes méthodes explorées afin de parvenir à un rendu en temps
Rendu temps réel de mer et de nuages Linares Antonin, Boyer Julien 17 décembre 2008 1 Résumé Nous allons traiter dans ce document les différentes méthodes explorées afin de parvenir à un rendu en temps
Compte rendu de LA37 B, TP numéro 1. Evolution de la température et du degrée d'hydratation
 4 6 8 2 4 8 22 26 3 34 38 42 46 5 54 58 62 66 7 74 78 83 89 96 8 44 Bertin Morgan Compte rendu de LA37 B, TP numéro. Les essais effectués par le laboratoire des ponts et chaussés nous ont fournis la température
4 6 8 2 4 8 22 26 3 34 38 42 46 5 54 58 62 66 7 74 78 83 89 96 8 44 Bertin Morgan Compte rendu de LA37 B, TP numéro. Les essais effectués par le laboratoire des ponts et chaussés nous ont fournis la température
Etude comparative de différents motifs utilisés pour le lancé de rayon
 Etude comparative de différents motifs utilisés pour le lancé de rayon Alexandre Bonhomme Université de Montréal 1 Introduction Au cours des dernières années les processeurs ont vu leurs capacités de calcul
Etude comparative de différents motifs utilisés pour le lancé de rayon Alexandre Bonhomme Université de Montréal 1 Introduction Au cours des dernières années les processeurs ont vu leurs capacités de calcul
Sommaire. Bertrand PECUCHET
 Sommaire I. Introduction... 2 II. Présentation de la Kinect... 3 1. Caractéristiques :... 4 III. Focus sur les différents capteurs de la Kinect... 5 1. Le capteur RGB... 5 2. Capteur et émetteur Infrarouge...
Sommaire I. Introduction... 2 II. Présentation de la Kinect... 3 1. Caractéristiques :... 4 III. Focus sur les différents capteurs de la Kinect... 5 1. Le capteur RGB... 5 2. Capteur et émetteur Infrarouge...
Baccalauréat L spécialité, Métropole et Réunion, 19 juin 2009 Corrigé.
 Baccalauréat L spécialité, Métropole et Réunion, 19 juin 2009 Corrigé. L usage d une calculatrice est autorisé Durée : 3heures Deux annexes sont à rendre avec la copie. Exercice 1 5 points 1_ Soit f la
Baccalauréat L spécialité, Métropole et Réunion, 19 juin 2009 Corrigé. L usage d une calculatrice est autorisé Durée : 3heures Deux annexes sont à rendre avec la copie. Exercice 1 5 points 1_ Soit f la
Géométrie discrète Chapitre V
 Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Géométrie discrète Chapitre V Introduction au traitement d'images Géométrie euclidienne : espace continu Géométrie discrète (GD) : espace discrétisé notamment en grille de pixels GD définition des objets
Laboratoire 4 Développement d un système intelligent
 DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
DÉPARTEMENT DE GÉNIE LOGICIEL ET DES TI LOG770 - SYSTÈMES INTELLIGENTS ÉTÉ 2012 Laboratoire 4 Développement d un système intelligent 1 Introduction Ce quatrième et dernier laboratoire porte sur le développement
Communications immersives : Enjeux et perspectives
 Journée Futur et Ruptures Communications immersives : Enjeux et perspectives Béatrice Pesquet-Popescu Télécom ParisTech, Département TSI 5 mars 2015 Institut Mines-Télécom Tendances actuelles Plus, plus,
Journée Futur et Ruptures Communications immersives : Enjeux et perspectives Béatrice Pesquet-Popescu Télécom ParisTech, Département TSI 5 mars 2015 Institut Mines-Télécom Tendances actuelles Plus, plus,
Université des Sciences et Technologies de Lille 1 UFR Informatique. Projet scientifique de Master 2 Image, Vision, Interaction.
 Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
Environnement logiciel open source pour la création d œuvres artistiques interactives
 Environnement logiciel open source pour la création d œuvres artistiques interactives Stéphane Donikian IRISA/CNRS Campus de Beaulieu 35042, Rennes Cedex, France [email protected] La création artistique
Environnement logiciel open source pour la création d œuvres artistiques interactives Stéphane Donikian IRISA/CNRS Campus de Beaulieu 35042, Rennes Cedex, France [email protected] La création artistique
Nouvelle Gammes Camera Canon IP
 Novembre 2013 NL002-2013 Nouvelle Gammes Camera Canon IP Les caméras en réseau de Canon combinent des technologies optiques pour le traitement des images à des technologies de diffusion en réseau développées
Novembre 2013 NL002-2013 Nouvelle Gammes Camera Canon IP Les caméras en réseau de Canon combinent des technologies optiques pour le traitement des images à des technologies de diffusion en réseau développées
Vérification audiovisuelle de l identité
 Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Figure 3.1- Lancement du Gambit
 3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
Intérêts et limites de la vidéo-surveillance intelligente pour la Sécurité Globale
 Intérêts et limites de la vidéo-surveillance intelligente pour la Sécurité Globale Pierre BERNAS 1 1 EVITECH +33.820.2008.39 pbernas at evitech dot com 1. Introduction Depuis la fin des années 90, la numérisation
Intérêts et limites de la vidéo-surveillance intelligente pour la Sécurité Globale Pierre BERNAS 1 1 EVITECH +33.820.2008.39 pbernas at evitech dot com 1. Introduction Depuis la fin des années 90, la numérisation
Logiciel XLSTAT version 7.0. 40 rue Damrémont 75018 PARIS
 Logiciel XLSTAT version 7.0 Contact : Addinsoft 40 rue Damrémont 75018 PARIS 2005-2006 Plan Présentation générale du logiciel Statistiques descriptives Histogramme Discrétisation Tableau de contingence
Logiciel XLSTAT version 7.0 Contact : Addinsoft 40 rue Damrémont 75018 PARIS 2005-2006 Plan Présentation générale du logiciel Statistiques descriptives Histogramme Discrétisation Tableau de contingence
Raisonnement par récurrence Suites numériques
 Chapitre 1 Raisonnement par récurrence Suites numériques Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Raisonnement par récurrence. Limite finie ou infinie d une suite.
Chapitre 1 Raisonnement par récurrence Suites numériques Terminale S Ce que dit le programme : CONTENUS CAPACITÉS ATTENDUES COMMENTAIRES Raisonnement par récurrence. Limite finie ou infinie d une suite.
BYOD Smart Solution. Mettre à disposition une solution qui peut être adaptée à des utilisateurs et appareils divers, à tout moment et en tout lieu
 Présentation de la solution BYOD Smart Solution Mettre à disposition une solution qui peut être adaptée à des utilisateurs et appareils divers, à tout moment et en tout lieu Cisco ou ses filiales, 2012.
Présentation de la solution BYOD Smart Solution Mettre à disposition une solution qui peut être adaptée à des utilisateurs et appareils divers, à tout moment et en tout lieu Cisco ou ses filiales, 2012.
Complexité. Licence Informatique - Semestre 2 - Algorithmique et Programmation
 Complexité Objectifs des calculs de complexité : - pouvoir prévoir le temps d'exécution d'un algorithme - pouvoir comparer deux algorithmes réalisant le même traitement Exemples : - si on lance le calcul
Complexité Objectifs des calculs de complexité : - pouvoir prévoir le temps d'exécution d'un algorithme - pouvoir comparer deux algorithmes réalisant le même traitement Exemples : - si on lance le calcul
Modules Multimédia PAO (Adobe)
") Modules Multimédia PAO (Adobe) Pré-requis : Bonne maîtrise de la manipulation d'un PC (environnement Windows ou Mac) et de la navigation Internet. Disposition pour le graphisme recommandée. Mémoire visuelle,
Modules Multimédia PAO (Adobe) Pré-requis : Bonne maîtrise de la manipulation d'un PC (environnement Windows ou Mac) et de la navigation Internet. Disposition pour le graphisme recommandée. Mémoire visuelle,
ESTELLE SPA FILTER CLEANING SYSTEM 1/6. Instructions d'installation Mode d'emploi FAQ
 ESTELLE SPA FILTER CLEANING SYSTEM 1/6 Instructions d'installation Mode d'emploi FAQ Instructions d'installation 2/6 CONTENU BOÎTE Estelle Disposables Cleaning System - Base - Couvercle transparent Trousse
ESTELLE SPA FILTER CLEANING SYSTEM 1/6 Instructions d'installation Mode d'emploi FAQ Instructions d'installation 2/6 CONTENU BOÎTE Estelle Disposables Cleaning System - Base - Couvercle transparent Trousse
Evaluation de la variabilité d'un système de mesure
 Evaluation de la variabilité d'un système de mesure Exemple 1: Diamètres des injecteurs de carburant Problème Un fabricant d'injecteurs de carburant installe un nouveau système de mesure numérique. Les
Evaluation de la variabilité d'un système de mesure Exemple 1: Diamètres des injecteurs de carburant Problème Un fabricant d'injecteurs de carburant installe un nouveau système de mesure numérique. Les
UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP250-97157 Pointe-à-Pitre Cedex CONTRAT 2010-2013 LE MASTER NOM DU DOMAINE STS
 UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP20-9717 Pointe-à-Pitre Cedex CONTRAT 2010-201 LE MASTER NOM DU DOMAINE STS Mention : Mathématiques Implantation : Guadeloupe FICHES DESCRIPTIVES
UNIVERSITE DES ANTILLES et DE LA GUYANE Campus de Fouillole BP20-9717 Pointe-à-Pitre Cedex CONTRAT 2010-201 LE MASTER NOM DU DOMAINE STS Mention : Mathématiques Implantation : Guadeloupe FICHES DESCRIPTIVES
L'intelligence en mouvement. Caméras AUTODOME 7000 avec fonction de suivi intelligent
 L'intelligence en mouvement Caméras AUTODOME 7000 avec fonction de suivi intelligent 2 Bosch AUTODOME 7000 Les caméras IP et HD AUTODOME 7000 combinent une intelligence avancée, une flexibilité de diffusion
L'intelligence en mouvement Caméras AUTODOME 7000 avec fonction de suivi intelligent 2 Bosch AUTODOME 7000 Les caméras IP et HD AUTODOME 7000 combinent une intelligence avancée, une flexibilité de diffusion