Synthèse d'images. (5) Composition de scène
|
|
|
- Flavien Roussy
- il y a 9 ans
- Total affichages :
Transcription

1 Synthèse d'images (5) Composition de scène Plan de l'exposé : 1- Transformations géométriques 2 - Déformations 3- Opérateurs booléens 4- Hiérarchie d'objets

2 1. Transformations géométriques Pour construire de nouveaux objets à partir de volumes élémentaires Pour changer le système des coordonnées utilisées pour décrire un objet.
3 Différents types Translation Homothétie D'après [QUID] p Symétrie orthogonale Symétrie centrale Rotation
4 Matrices homogènes Opérations matricielles (2D) - Toutes les opérations précédentes se ramènent à la multiplication d'une matrice par le vecteur des coordonnées de départ, SAUF pour la translation (addition de 2 vecteurs) - On va représenter un point P(x,y) par une famille de vecteurs de 3 éléments (x,y,w). W est le facteur d'échelle. Ainsi (x,y,w) et (x/w, y/w, 1) représentent le même point. - Si W=0, on dira que le point est à l'infini Translation x' y' = d x x 0 1 d y y Homothétie x' y' = 1 s x 0 0 x 0 s y 0 y Rotation par rapport à l'origine x' y' = 1 cos sin 0 x sin cos 0 y
![Exemple de composition On veut faire une rotation de la maison autour du point P1 Suite d'opérations à réaliser : [FOLEY] pp.](/docs-images/60/44433073/images/5-0.png "208-9 Translation de l'objet à l'origine & Rotation & Translation de l'objet à sa position de départ Matrices résultantes : T(x 1, y 1 )o R( )o T( x 1, y 1 ) 1 0 x 1 cos sin 0 1 0 x 1 = 0 1 y 1 sin")
5 Exemple de composition On veut faire une rotation de la maison autour du point P1 Suite d'opérations à réaliser : [FOLEY] pp Translation de l'objet à l'origine & Rotation & Translation de l'objet à sa position de départ Matrices résultantes : T(x 1, y 1 )o R( )o T( x 1, y 1 ) 1 0 x 1 cos sin x 1 = 0 1 y 1 sin cos y cos sin x 1 (1 cos ) + y 1 sin = sin cos y 1 (1 cos ) x 1 sin Commutativité pas toujours vérifiée : T.R R.T Attention à l'ordre!!
6 Translation : Opérations matricielles (3D) x' d x x y' z' = d y yz d z Homothétie : x' s x x y' z' = 0 s y 0 0 yz 0 0 s z Rotations par rapports aux axes X, Y et Z Si répère "main droite"!!! θ positif en allant de X à Y R Z ( ) = cos sin sin cos R X ( ) = 0 cos sin 0 0 sin cos cos 0 sin 0 R Y ( ) = sin 0 cos
7 Rotation autour d'un axe quelconque : D = d 2 + y 2 cos( ) = d D sin( ) = y D 4- Rotation Rz(θ) de θ sur l'axe des Z 5- Opération inverse de 3 : Rx(-β) 6- Opération inverse de 2 : Ry(α) 1- Translation T(-x1,-y1,-z1) pour amener P1 à l'origine x = x 2 x 1 y = y 2 y 1 z = z 2 z 1 7- Opération inverse de 1 : T(x1,y1,z1) 2- Rotation Ry(-α) autour de l'axe des Y pour amener P'2 dans le plan (O,Y,Z) d = x 2 + z 2 z cos(- ) = d sin(- ) = -x' d 3- Rotation Rx(β) autour de l'axe des X pour amener P''2 sur l'axe des Z
8 Un exemple : rotation de 60 selon l'axe (0,0,0)-(1,1,1) On a : x = x 2 x 1 = 1 y = y 2 y 1 = 1 z = z 2 z 1 = 1 on a aussi R Z ( 3 ) = 1/ 2 3 / / 2 1/ La matrice de transformation est : d = 2 cos(- ) = 1 sin(- ) = = 4 M = R Y 4 o R X ( )o R 5 Z ( )o R 3 X ( )o R 5 Y 4 1 / 2 0 1/ 2 0 donc R Y ( ) = / 2 0 1/ Soit M = D = 3 cos( ) = 2 3 sin( ) = 1 3 = 5 donc R X ( 5 ) = / 3 1 / / 3 2 /

9 Application à un cube : Table des sommets avant rotation : Table des sommets après rotation : /3-1/3 2/3-1/3 2/3 2/3 1/3 1/3 4/3 2/3 2/3-1/3 4/3 1/3 1/3 1/3 4/3 1/
10 2. Déformations d'objets Des techniques surtout utilisées en animation (donc un peu hors sujet ) Appliquée directement sur la représentation polyédrale => risque : un cube tordu n'est plus un polyèdre à 6 faces => algorithme de subdivision adaptative Appliquée sur des surfaces paramétrées (Bézier, Bspline) => facile, action sur les points de contrôles => possibilité de déformation locale si B-spline Bibliographie : [WATT] chapitre 17, sur l'animation des objets mous.
 La transformation est variable")
 : ( x' y' z' ) =")
 : ( x' y' z' ) = R Z ( f")
11 Déformations non-linéaires (Barr, 1984) La transformation est variable selon chaque point du polyèdre. "tapering" (effilage) : ( x' y' z' ) = ( xf (z) yf (z) z) "twisting" (torsion) : ( x' y' z' ) = R Z ( f (z)) "bending" (pliage)
12 On se donne : - Une image (une courbe, un polygone ) de départ - Une image d'arrivée Le "morphing" On veut calculer N images intermédiaires Par exemple : par interpolation linéaire x i = x D + i x A x D N +1, idem avec yi et zi [WATT] p. 413
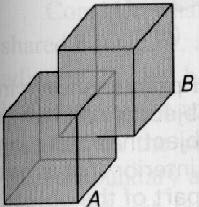
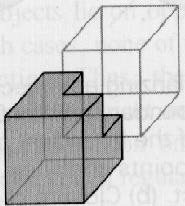
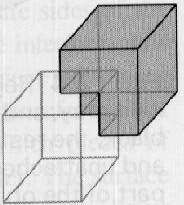

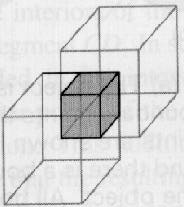
13 3. Opérateurs booléens [FOLEY] p.535 Différence Union Intersection
 intersection { sphere { <0, 0, 0>, 1 translate -0.")
14 Exemples en POV Union de deux sphères union{ sphere { <0, 0, 0>, 1 translate -0.5*x sphere { <0, 0, 0>, 1 translate 0.5*x pigment { Red Intersection de deux sphères (extrusion) intersection { sphere { <0, 0, 0>, 1 translate -0.5*x sphere { <0, 0, 0>, 1 translate 0.5*x pigment { Red

 => nombreuses techniques (surtout pour la CAO) Les")
15 Représentation interne Pour les opérateurs ensemblistes : solide liste de faces solide = ensemble d'éléments de volume [FOLEY] p => suppose une représentation interne adaptée (plus sophistiquée) => nombreuses techniques (surtout pour la CAO) Les "quadtrees" et les "octrees"



16 Exemple d'opérations booléenes : [FOLEY] p. 553 Les objets et leurs quadtrees : Union Intersection


17 4. Hiérarchie d'objets La scène peut être décrite par un arbre : Le concept de hiérarchie d'objets graphiques est présent dans toutes les bibliothèques de programmation 3D, ainsi que dans les langages spécialisés Exemple d'un robot : [FOLEY] p. 289
18 Exemple 1 : POV #declare On veut créer un pendantif : - Structure répétitive : anneau = 2 demi-tores et deux cyclindres - Les anneaux sont pivotés de 90 à chaque fois. // Copyright 1996 by the POV-Ray Team #include "colors.inc" camera { location <0,.1, -25> look_at 0 angle 36 background { color White light_source{ <300, 300, -1000> White #declare Half_Torus = difference { torus { 4,1 sturm rotate x*-90 // so we can see it from the top box { <-5, -5, -1>, <5, 0, 1> Flip_It_Over = x*180 #declare Torus_Translate = 8 #declare Link_Translate = Torus_Translate*2-2*y #declare Chain_Segment = cylinder { <0, 4, 0>, <0, -4, 0>, 1 #declare Chain_Gold = texture { pigment { BrightGold finish { ambient.1 diffuse.4 reflection.25 specular 1 metallic #declare Link = union { object { Half_Torus translate y*torus_translate/2 object { Half_Torus rotate Flip_It_Over translate -y*torus_translate/2 object { Chain_Segment translate x*torus_translate/2 object { Chain_Segment translate -x*torus_translate/2 texture { Chain_Gold #declare Link_Pair = union { object { Link object { Link translate y*link_translate rotate y*90 #declare Chain = union { object { Link_Pair object { Link_Pair translate y*link_translate*2 object { Link_Pair translate y*link_translate*4 object { Link_Pair translate y*link_translate*6 object { Link_Pair translate -y*link_translate*2 object { Link_Pair translate -y*link_translate*4 object { Link_Pair translate -y*link_translate*6 object { Chain scale.1 rotate <0, 45, -45>
19 Exemple 2 : VRML VRML permet de décrire des objets graphiques (au sens large) et leurs actions : des "nodes". - Les "nodes" sont organisés en une hiérarchie appelée le "scene graph". - Certains "nodes" affectent le comportement des "nodes" suivants ("rotation" ou "material", par exemple) - Le "separator" permet de limiiter la portée de telle ou telle propriété à des parties de la scène. #VRML V1.0 ascii Separator { DirectionalLight { direction PerspectiveCamera { position orientation focaldistance Separator { # sphere 1 Material { diffusecolor # Red Translation { translation Sphere { radius 2.3 Separator { # The blue cube Material { diffusecolor # Blue Transform { translation rotation Cube {


20 Représentation interne Exemple pour PHIGS, extrait de [FOLEY] p. 318
Synthèse d'images. (1) Introduction
 Introduction") Synthèse d'images (1) Introduction Plan de l'exposé : 1- Problématique 2- Description de la scène 3- Visualisation de la scène 4- Le logiciel et le matériel 5- Références v5 Une image = une matrice de
Synthèse d'images (1) Introduction Plan de l'exposé : 1- Problématique 2- Description de la scène 3- Visualisation de la scène 4- Le logiciel et le matériel 5- Références v5 Une image = une matrice de
Chapitre 3 : Repères et positionnement 3D
 Chapitre 3 : Repères et positionnement 3D Modélisation 3D et Synthèse Fabrice Aubert [email protected] Master Informatique 2014-2015 F. Aubert (MS2) M3DS/ 3 - Repères et positionnement 3D 2014-2015
Chapitre 3 : Repères et positionnement 3D Modélisation 3D et Synthèse Fabrice Aubert [email protected] Master Informatique 2014-2015 F. Aubert (MS2) M3DS/ 3 - Repères et positionnement 3D 2014-2015
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
TP Blender n 2 : Importation d un modèle SketchUp et animation
 TP Blender n 2 : Importation d un modèle SketchUp et animation Service de Conception Géométrique Université de Liège Aérospatiale et Mécanique Conçu avec Blender 2.66 et SketchUp 8 De SketchUp à Blender
TP Blender n 2 : Importation d un modèle SketchUp et animation Service de Conception Géométrique Université de Liège Aérospatiale et Mécanique Conçu avec Blender 2.66 et SketchUp 8 De SketchUp à Blender
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Formation à distance Powerpoint Réaliser une présentation - FOAD exemples de parcours -
 Au travers de ce programme, vous apprendrez à utiliser l'ensemble des objets powerpoint (texte, listes à puces, lien hypertexte, organigramme, diagramme, tableau,...), ainsi que l'animation de votre diaporama.
Au travers de ce programme, vous apprendrez à utiliser l'ensemble des objets powerpoint (texte, listes à puces, lien hypertexte, organigramme, diagramme, tableau,...), ainsi que l'animation de votre diaporama.
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
Logiciel Libre Cours 3 Fondements: Génie Logiciel
 Logiciel Libre Cours 3 Fondements: Génie Logiciel Stefano Zacchiroli [email protected] Laboratoire PPS, Université Paris Diderot 2013 2014 URL http://upsilon.cc/zack/teaching/1314/freesoftware/
Logiciel Libre Cours 3 Fondements: Génie Logiciel Stefano Zacchiroli [email protected] Laboratoire PPS, Université Paris Diderot 2013 2014 URL http://upsilon.cc/zack/teaching/1314/freesoftware/
A. Benali 0248484081 [email protected]. Objectifs du cours
 A. Benali 0248484081 [email protected] 64 Objectifs du cours Comment procéder pour donner des ordres au robot Apprendre à représenter la position et l orientation d une chaîne mécanique Être capable
A. Benali 0248484081 [email protected] 64 Objectifs du cours Comment procéder pour donner des ordres au robot Apprendre à représenter la position et l orientation d une chaîne mécanique Être capable
Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE
 Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
Etablissement : NOM : Classe :. Année scolaire : 20.. / 20 Initiation aux Sciences de l Ingénieur LIVRET DE SECONDE N fiche Savoirs Compétences Supports d apprentissage (à compléter) Validation (par l
Programme de la 1ère année
 Programme de la 1ère année de master informatique Recopié du Syllabus M1 Informatique. 2004-2005 (UPS Toulouse) TC1 - Conception et Programmation Parallèle et Orientée Objet (96h) Objectif : Ce cours a
Programme de la 1ère année de master informatique Recopié du Syllabus M1 Informatique. 2004-2005 (UPS Toulouse) TC1 - Conception et Programmation Parallèle et Orientée Objet (96h) Objectif : Ce cours a
AP1.1 : Montages électroniques élémentaires. Électricité et électronique
 STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES
 I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
I - PUISSANCE D UN POINT PAR RAPPORT A UN CERCLE CERCLES ORTHOGONAUX POLES ET POLAIRES Théorème - Définition Soit un cercle (O,R) et un point. Une droite passant par coupe le cercle en deux points A et
Exo7. Matrice d une application linéaire. Corrections d Arnaud Bodin.
 Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Exo7 Matrice d une application linéaire Corrections d Arnaud odin. Exercice Soit R muni de la base canonique = ( i, j). Soit f : R R la projection sur l axe des abscisses R i parallèlement à R( i + j).
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Synthèse d images Edmond Boyer
 Synthèse d images Edmond Boyer [email protected] UFRIMA 1 Une introduction aux techniques de l image Techniques de l image : utiliser l ordinateur pour interpréter ou générer des imag es. Motivations
Synthèse d images Edmond Boyer [email protected] UFRIMA 1 Une introduction aux techniques de l image Techniques de l image : utiliser l ordinateur pour interpréter ou générer des imag es. Motivations
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
31. OOo Draw Réglages propres à Draw
 31. OOo Draw Réglages propres à Draw Thèmes de l'exercice Effectuer les réglages de bases spécifiques à OOo Draw. Tâches à effectuer Indications 1 Lancement de OOo Draw On démarre OOo Draw avec Démarrer
31. OOo Draw Réglages propres à Draw Thèmes de l'exercice Effectuer les réglages de bases spécifiques à OOo Draw. Tâches à effectuer Indications 1 Lancement de OOo Draw On démarre OOo Draw avec Démarrer
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Object Removal by Exemplar-Based Inpainting
 Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Object Removal by Exemplar-Based Inpainting Kévin Polisano A partir d un article de A. Criminisi, P. Pérez & H. K. Toyama 14/02/2013 Kévin Polisano Object Removal by Exemplar-Based Inpainting 14/02/2013
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Rendu et Eclairage. La Cambre AlICe (www.alicelab.be) Note technique 3DS MAX décembre 2007 Denis Derycke ([email protected])
 Note technique 3DS MAX décembre 2007 Denis Derycke (denisd@ox2.be)") Rendu et Eclairage Note technique relative à l'utilisation de 3DS MAX dans le cadre de la production des court-métrages sur des objets de design réalisés dans l'option AIM. Avertissements: Une seul type
Rendu et Eclairage Note technique relative à l'utilisation de 3DS MAX dans le cadre de la production des court-métrages sur des objets de design réalisés dans l'option AIM. Avertissements: Une seul type
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer!
 JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
JPEG, PNG, PDF, CMJN, HTML, Préparez-vous à communiquer! 1 / Contexte L ordinateur La loi du nombre La numérisation = codage d une information en chiffres binaire : 0 1 («bit») 8 bits = 1 octet 1ko = 1024
Thème Visite virtuelle dans un établissement avec VRML Réalisé par : - M me Alioui Wahiba.
 République Algérienne Démocratique et Populaire Université Abou Bakr Belkaid Tlemcen Faculté des Sciences Département d Informatique Mémoire de fin d études Pour l obtention du diplôme de Licence en Informatique
République Algérienne Démocratique et Populaire Université Abou Bakr Belkaid Tlemcen Faculté des Sciences Département d Informatique Mémoire de fin d études Pour l obtention du diplôme de Licence en Informatique
05/09/2015. M Ponctualité : CM TD TP & Projet Æ En cas d absence : récupérer!!! 3 05/09/2015
 Synthèse d images L3 Présentation du module Sandrine LANQUETIN Bureau G08 [email protected] Qui? Quand? Mode d emploi M Intervenants : Æ S. Lanquetin [email protected] M
Synthèse d images L3 Présentation du module Sandrine LANQUETIN Bureau G08 [email protected] Qui? Quand? Mode d emploi M Intervenants : Æ S. Lanquetin [email protected] M
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE
 ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
ÉCOLE D'INGÉNIEURS DE FRIBOURG (E.I.F.) SECTION DE MÉCANIQUE G.R. Nicolet, revu en 2006 STATIQUE GRAPHIQUE ET STATIQUE ANALYTIQUE Eléments de calcul vectoriel Opérations avec les forces Equilibre du point
INFOGRAPHIE. Daniel Thalmann. Ecole Polytechnique Fédérale de Lausanne
 INFOGRAPHIE Daniel Thalmann Ecole Polytechnique Fédérale de Lausanne Mars 23 1. LES CONCEPTS DE BASE 1.1 Le rôle de l'informatique graphique et ses applications 1.1.1 Introduction Il y a déjà 35 ans que
INFOGRAPHIE Daniel Thalmann Ecole Polytechnique Fédérale de Lausanne Mars 23 1. LES CONCEPTS DE BASE 1.1 Le rôle de l'informatique graphique et ses applications 1.1.1 Introduction Il y a déjà 35 ans que
Dérivation : Résumé de cours et méthodes
 Dérivation : Résumé de cours et métodes Nombre dérivé - Fonction dérivée : DÉFINITION (a + ) (a) Etant donné est une onction déinie sur un intervalle I contenant le réel a, est dérivable en a si tend vers
Dérivation : Résumé de cours et métodes Nombre dérivé - Fonction dérivée : DÉFINITION (a + ) (a) Etant donné est une onction déinie sur un intervalle I contenant le réel a, est dérivable en a si tend vers
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur.
 C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
C.F.A.O. : Conception et Fabrication Assistées par Ordinateur. La CFAO réunit dans une même démarche informatique les actions de conception et de fabrication d un objet. La technique utilisée permet à
pcon.planner 6 Préparer et présenter une implantation en toute simplicité
 pcon.planner 6 Préparer et présenter une implantation en toute simplicité Sommaire 1. Installation :... 3 2. Démarrer le logiciel :... 3 3. Interface :... 3 4. Naviguer :... 4 5. Réaliser une implantation
pcon.planner 6 Préparer et présenter une implantation en toute simplicité Sommaire 1. Installation :... 3 2. Démarrer le logiciel :... 3 3. Interface :... 3 4. Naviguer :... 4 5. Réaliser une implantation
Exemple d application en CFD : Coefficient de traînée d un cylindre
 Exemple d application en CFD : Coefficient de traînée d un cylindre 1 Démarche générale Avec Gambit Création d une géométrie Maillage Définition des conditions aux limites Avec Fluent 3D Choix des équations
Exemple d application en CFD : Coefficient de traînée d un cylindre 1 Démarche générale Avec Gambit Création d une géométrie Maillage Définition des conditions aux limites Avec Fluent 3D Choix des équations
Développement mobile MIDP 2.0 Mobile 3D Graphics API (M3G) JSR 184. Frédéric BERTIN [email protected]
 JSR 184. Frédéric BERTIN fbertin@neotilus.com") Développement mobile MIDP 2.0 Mobile 3D Graphics API (M3G) JSR 184 Frédéric BERTIN [email protected] Présentaion : Mobile 3D Graphics API JSR 184 M3G :présentation Package optionnel de l api J2ME. Prend
Développement mobile MIDP 2.0 Mobile 3D Graphics API (M3G) JSR 184 Frédéric BERTIN [email protected] Présentaion : Mobile 3D Graphics API JSR 184 M3G :présentation Package optionnel de l api J2ME. Prend
REALISATION D UN MAILLAGE
 MODE D EMPLOI REALISATION D UN MAILLAGE AVEC ICEM 4.08 Hervé Neau Août 2000 Version 1.0 SOMMAIRE 1 : INTRODUCTION... 2 2 : PRINCIPE DE FONCTIONNEMENT... 2 3 : INSTALLATION D ICEM 4.08... 3 4 : LANCEMENT
MODE D EMPLOI REALISATION D UN MAILLAGE AVEC ICEM 4.08 Hervé Neau Août 2000 Version 1.0 SOMMAIRE 1 : INTRODUCTION... 2 2 : PRINCIPE DE FONCTIONNEMENT... 2 3 : INSTALLATION D ICEM 4.08... 3 4 : LANCEMENT
EXPERIENCE. Windows/Linux/Mac OpenGL Gtk Tcl SQL VFX Visual C++ gcc.
 Philippe DELORME 44, bd Diderot 75012 Paris Tél: 01 46 28 58 32 47 ans - Marié, 3 enfants. email: [email protected] EXPERIENCE 2004 (mars) Attitude-Studio 50, avenue du Président Wilson 93214 St
Philippe DELORME 44, bd Diderot 75012 Paris Tél: 01 46 28 58 32 47 ans - Marié, 3 enfants. email: [email protected] EXPERIENCE 2004 (mars) Attitude-Studio 50, avenue du Président Wilson 93214 St
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Onveutetudierl'equationdierentiellesuivante
 Quelques resultats sur l'equation des ondes Onveutetudierl'equationdierentiellesuivante (Ondes) @tu xu=f surr Rd: C'est dratique une equation +jj designature(;d).cettenoteestorganiseedela hyperbolique
Quelques resultats sur l'equation des ondes Onveutetudierl'equationdierentiellesuivante (Ondes) @tu xu=f surr Rd: C'est dratique une equation +jj designature(;d).cettenoteestorganiseedela hyperbolique
Méthodes de quadrature. Polytech Paris-UPMC. - p. 1/48
 Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Méthodes de Polytech Paris-UPMC - p. 1/48 Polynôme d interpolation de Preuve et polynôme de Calcul de l erreur d interpolation Étude de la formule d erreur Autres méthodes - p. 2/48 Polynôme d interpolation
Cours 7 : Utilisation de modules sous python
 Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
GMIN 330 Nancy Rodriguez
 Unity TP3 Librement adapté et traduit de http://unity3d.com/learn/tutorials/modules/beginner/physics/assignments/bouncing-ball http://docs.unity3d.com/documentation/manual/instantiatingprefabs.html http://3dfoin.com/index-3.html
Unity TP3 Librement adapté et traduit de http://unity3d.com/learn/tutorials/modules/beginner/physics/assignments/bouncing-ball http://docs.unity3d.com/documentation/manual/instantiatingprefabs.html http://3dfoin.com/index-3.html
Intégrales doubles et triples - M
 Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Intégrales s et - [email protected] 1/27 - Intégrales (rappel) Rappels Approximation éfinition : Intégrale définie Soit f définie continue sur I = [a, b] telle que f (x) > 3 2.5 2 1.5 1.5.5 1 1.5
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Python - introduction à la programmation et calcul scientifique
 Université de Strasbourg Environnements Informatique Python - introduction à la programmation et calcul scientifique Feuille de TP 1 Avant de commencer Le but de ce TP est de vous montrer les bases de
Université de Strasbourg Environnements Informatique Python - introduction à la programmation et calcul scientifique Feuille de TP 1 Avant de commencer Le but de ce TP est de vous montrer les bases de
OFFRE CAO Bijouterie
 BP 80126-35801 DINARD Cedex - FRANCE Tel : +33 (0) 2 99 16 35 35 - Fax : +33 (0) 2 99 46 41 41 E mail : [email protected] - Web site : www.multistation.com Dinard, 15 octobre 2012 OFFRE CAO
BP 80126-35801 DINARD Cedex - FRANCE Tel : +33 (0) 2 99 16 35 35 - Fax : +33 (0) 2 99 46 41 41 E mail : [email protected] - Web site : www.multistation.com Dinard, 15 octobre 2012 OFFRE CAO
Generative Structural Analysis (GPS et EST)
") Generative Structural Analysis (GPS et EST) Plan du site Préface Nouveautés Mise en route Tâches de base Description de l'atelier Glossaire Index Dassault Systèmes 1994-2000. Tous droits réservés. Plan
Generative Structural Analysis (GPS et EST) Plan du site Préface Nouveautés Mise en route Tâches de base Description de l'atelier Glossaire Index Dassault Systèmes 1994-2000. Tous droits réservés. Plan
Algorithmes pour la planification de mouvements en robotique non-holonome
 Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Algorithmes pour la planification de mouvements en robotique non-holonome Frédéric Jean Unité de Mathématiques Appliquées ENSTA Le 02 février 2006 Outline 1 2 3 Modélisation Géométrique d un Robot Robot
Ceci est un aperçu du livre "QCAD - Introduction à la conception assistée par ordinateur (CAO)" QCAD
 QCAD") QCAD Introduction à la conception assistée par ordinateur (CAO) Andrew Mustun Traduction Français: Amaury de Cizancourt Table des matières Introduction Section I: Premiers pas avec QCAD Introduction au
QCAD Introduction à la conception assistée par ordinateur (CAO) Andrew Mustun Traduction Français: Amaury de Cizancourt Table des matières Introduction Section I: Premiers pas avec QCAD Introduction au
Art of Illusion 2.0: quand Java fait de la très bonne 3D
 Art of Illusion 2.0: quand Java fait de la très bonne 3D Olivier Saraja - [email protected] Entièrement écrite en Java, il s'agit d'une suite de modélisation, d'animation et de rendu d'images
Art of Illusion 2.0: quand Java fait de la très bonne 3D Olivier Saraja - [email protected] Entièrement écrite en Java, il s'agit d'une suite de modélisation, d'animation et de rendu d'images
Initiation au dessin Bitmap
 Sébastien Stasse Initiation au dessin Bitmap Guide d apprentissage et notions de base 2e édition Nom : Classe : Produit par l École Alex Manoogian AW version 6 Initiation au dessin bitmap Initiation au
Sébastien Stasse Initiation au dessin Bitmap Guide d apprentissage et notions de base 2e édition Nom : Classe : Produit par l École Alex Manoogian AW version 6 Initiation au dessin bitmap Initiation au
Imagerie Numérique Synthèse d images. DUT Informatique 2012-2013. Sébastien THON
 Imagerie Numérique Synthèse d images 4. Animation DUT Informatique 2012-2013 Sébastien THON IUT de l Université de Provence, site d Arles Département Informatique Introduction Animation = succession d
Imagerie Numérique Synthèse d images 4. Animation DUT Informatique 2012-2013 Sébastien THON IUT de l Université de Provence, site d Arles Département Informatique Introduction Animation = succession d
Chapitre 6. Fonction réelle d une variable réelle
 Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
Chapitre 6 Fonction réelle d une variable réelle 6. Généralités et plan d étude Une application de I dans R est une correspondance entre les éléments de I et ceu de R telle que tout élément de I admette
ANALYSE CATIA V5. 14/02/2011 Daniel Geffroy IUT GMP Le Mans
 ANALYSE CATIA V5 1 GSA Generative Structural Analysis 2 Modèle géométrique volumique Post traitement Pré traitement Maillage Conditions aux limites 3 Ouverture du module Choix du type d analyse 4 Calcul
ANALYSE CATIA V5 1 GSA Generative Structural Analysis 2 Modèle géométrique volumique Post traitement Pré traitement Maillage Conditions aux limites 3 Ouverture du module Choix du type d analyse 4 Calcul
Détection et suivi d'objets dans une séquence d'images par contours actifs
 Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Détection et suivi d'objets dans une séquence d'images par contours actifs A. Fekir (1), N. Benamrane (2) et A. Taleb-Ahmed (3) (1) Département d informatique, Université de Mustapha Stambouli, BP 763,
Programme de la classe de première année MPSI
 Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
Objectifs Programme de la classe de première année MPSI I - Introduction à l analyse L objectif de cette partie est d amener les étudiants vers des problèmes effectifs d analyse élémentaire, d introduire
PREMIER PAS EN IMAGE DE SYNTHÈSE
 PREMIER PAS EN IMAGE DE SYNTHÈSE Introduction... 1 Le Lancer de Rayon... 2 Les outils... 2 Créons notre première image... 3 Objets composant la scène... 3 Éclairage... 4 Point de vue... 4 Les fichiers.pov...
PREMIER PAS EN IMAGE DE SYNTHÈSE Introduction... 1 Le Lancer de Rayon... 2 Les outils... 2 Créons notre première image... 3 Objets composant la scène... 3 Éclairage... 4 Point de vue... 4 Les fichiers.pov...
GMEC1311 Dessin d ingénierie. Chapitre 1: Introduction
 GMEC1311 Dessin d ingénierie Chapitre 1: Introduction Contenu du chapitre Introduction au dessin technique Normes Vues Traits Échelle Encadrement 2 Introduction Les dessins ou graphiques sont utilisés
GMEC1311 Dessin d ingénierie Chapitre 1: Introduction Contenu du chapitre Introduction au dessin technique Normes Vues Traits Échelle Encadrement 2 Introduction Les dessins ou graphiques sont utilisés
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
La révolution SaaS au service de la valorisation de la recherche
 La révolution SaaS au service de la valorisation de la recherche Jérémie Bellec Structure Computation Problématique Question des industriels : Comment peut-on utiliser votre logiciel? Logiciel de recherche?
La révolution SaaS au service de la valorisation de la recherche Jérémie Bellec Structure Computation Problématique Question des industriels : Comment peut-on utiliser votre logiciel? Logiciel de recherche?
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
DÉVERSEMENT ÉLASTIQUE D UNE POUTRE À SECTION BI-SYMÉTRIQUE SOUMISE À DES MOMENTS D EXTRÉMITÉ ET UNE CHARGE RÉPARTIE OU CONCENTRÉE
 Revue Construction étallique Référence DÉVERSEENT ÉLASTIQUE D UNE POUTRE À SECTION BI-SYÉTRIQUE SOUISE À DES OENTS D EXTRÉITÉ ET UNE CHARGE RÉPARTIE OU CONCENTRÉE par Y. GALÉA 1 1. INTRODUCTION Que ce
Revue Construction étallique Référence DÉVERSEENT ÉLASTIQUE D UNE POUTRE À SECTION BI-SYÉTRIQUE SOUISE À DES OENTS D EXTRÉITÉ ET UNE CHARGE RÉPARTIE OU CONCENTRÉE par Y. GALÉA 1 1. INTRODUCTION Que ce
SUPPORT DE COURS FLASH CS4
 SUPPORT DE COURS FLASH CS4 A.F.C.I NEWSOFT 12 16 Rue de Vincennes 93100 Montreuil TEL : 01.42.87.40.20 FAX : 01. 42.87.38.28 Site : www.afci.fr - Email : [email protected] SOMMAIRE ENVIRONNEMENT DE TRAVAIL...
SUPPORT DE COURS FLASH CS4 A.F.C.I NEWSOFT 12 16 Rue de Vincennes 93100 Montreuil TEL : 01.42.87.40.20 FAX : 01. 42.87.38.28 Site : www.afci.fr - Email : [email protected] SOMMAIRE ENVIRONNEMENT DE TRAVAIL...
Convers3 Documentation version 3.07. Par Eric DAVID : [email protected]
 Convers3 Documentation version 3.07 Par Eric DAVID : [email protected] 1 INSTALLATION DE CONVERS... 2 2 UTILISATION DE CONVERS... 2 2.1 FENETRE PRINCIPALE... 2 2.1.1 Convention de saisie et d affichage des
Convers3 Documentation version 3.07 Par Eric DAVID : [email protected] 1 INSTALLATION DE CONVERS... 2 2 UTILISATION DE CONVERS... 2 2.1 FENETRE PRINCIPALE... 2 2.1.1 Convention de saisie et d affichage des
INTELLIGENCE ECONOMIQUE : ENJEUX ET RETOUR D EXPERIENCE PILOTE DANS SEPT PMI DE BOURGOGNE
 INTELLIGENCE ECONOMIQUE : ENJEUX ET RETOUR D EXPERIENCE PILOTE DANS SEPT PMI DE BOURGOGNE BUSINESS INTELLIGENCE : GOALS AND RESULTS OF A PILOT EXPERIMENT INVOLVING SEVEN SMEs FROM BOURGOGNE Ludovic DENOYELLE,
INTELLIGENCE ECONOMIQUE : ENJEUX ET RETOUR D EXPERIENCE PILOTE DANS SEPT PMI DE BOURGOGNE BUSINESS INTELLIGENCE : GOALS AND RESULTS OF A PILOT EXPERIMENT INVOLVING SEVEN SMEs FROM BOURGOGNE Ludovic DENOYELLE,
"Modélisation interactive d'un genou humain"
 Stage M2 PRO IICAO, du 1er avril au 31 septembre 2008 "Modélisation interactive d'un genou humain" Vincent Vansuyt Sous la tutelle de François Faure et François Boux de Casson Dans l'équipe Evasion, laboratoire
Stage M2 PRO IICAO, du 1er avril au 31 septembre 2008 "Modélisation interactive d'un genou humain" Vincent Vansuyt Sous la tutelle de François Faure et François Boux de Casson Dans l'équipe Evasion, laboratoire
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
Glissière linéaire à rouleaux
 LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
LRX Guidage linéaire Introduction Rail de guidage Joint Graisseur Corps Rouleaux cylindriques Joint Cage Couvercle d extrémité Les guides linéaires à rouleaux de la série LRX offrent une haute fiabilité
Préparer un état de l art
 Préparer un état de l art Khalil DRIRA LAAS-CNRS, Toulouse Unité de recherche ReDCAD École Nationale d ingénieurs de Sfax Étude de l état de l art? Une étude ciblée, approfondie et critique des travaux
Préparer un état de l art Khalil DRIRA LAAS-CNRS, Toulouse Unité de recherche ReDCAD École Nationale d ingénieurs de Sfax Étude de l état de l art? Une étude ciblée, approfondie et critique des travaux
Environnement. Animation. Interactivité
 Département Education et Technologie Environnement Animation Interactivité CRÉATION D ANIMATIONS INTERACTIVES EN FLASH (Notes provisoires) Monique Colinet 5.85 Mai 2004 Centre pour la formation à l Informatique
Département Education et Technologie Environnement Animation Interactivité CRÉATION D ANIMATIONS INTERACTIVES EN FLASH (Notes provisoires) Monique Colinet 5.85 Mai 2004 Centre pour la formation à l Informatique
Introduction à Adobe Illustrator pour la cartographie et la mise en page
 Atelier Carto. Septembre 2009 Dept. Géographie / Université de Toulouse-Le Mirail Laurent Jégou Introduction à Adobe Illustrator pour la cartographie et la mise en page Le présent support n'a pas prétention
Atelier Carto. Septembre 2009 Dept. Géographie / Université de Toulouse-Le Mirail Laurent Jégou Introduction à Adobe Illustrator pour la cartographie et la mise en page Le présent support n'a pas prétention
Système binaire. Algèbre booléenne
 Algèbre booléenne Système binaire Système digital qui emploie des signaux à deux valeurs uniques En général, les digits employés sont 0 et 1, qu'on appelle bits (binary digits) Avantages: on peut utiliser
Algèbre booléenne Système binaire Système digital qui emploie des signaux à deux valeurs uniques En général, les digits employés sont 0 et 1, qu'on appelle bits (binary digits) Avantages: on peut utiliser
Mario Geiger octobre 08 ÉVAPORATION SOUS VIDE
 ÉVAPORATION SOUS VIDE 1 I SOMMAIRE I Sommaire... 2 II Évaporation sous vide... 3 III Description de l installation... 5 IV Travail pratique... 6 But du travail... 6 Principe... 6 Matériel... 6 Méthodes...
ÉVAPORATION SOUS VIDE 1 I SOMMAIRE I Sommaire... 2 II Évaporation sous vide... 3 III Description de l installation... 5 IV Travail pratique... 6 But du travail... 6 Principe... 6 Matériel... 6 Méthodes...
Le théorème de Perron-Frobenius, les chaines de Markov et un célèbre moteur de recherche
 Le théorème de Perron-Frobenius, les chaines de Markov et un célèbre moteur de recherche Bachir Bekka Février 2007 Le théorème de Perron-Frobenius a d importantes applications en probabilités (chaines
Le théorème de Perron-Frobenius, les chaines de Markov et un célèbre moteur de recherche Bachir Bekka Février 2007 Le théorème de Perron-Frobenius a d importantes applications en probabilités (chaines
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies
 Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
Projet de traitement d'image - SI 381 reconstitution 3D d'intérieur à partir de photographies Régis Boulet Charlie Demené Alexis Guyot Balthazar Neveu Guillaume Tartavel Sommaire Sommaire... 1 Structure
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point (x 0,y 0,z 0 ) donné :
 donné :") Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Enoncés : Stephan de Bièvre Corrections : Johannes Huebschmann Exo7 Plans tangents à un graphe, différentiabilité Exercice 1 Trouver l équation du plan tangent pour chaque surface ci-dessous, au point
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
SSNL126 - Flambement élastoplastique d'une poutre droite. Deux modélisations permettent de tester le critère de flambement en élastoplasticité :
 Titre : SSNL16 - Flambement élastoplastique d'une poutre [...] Date : 15/1/011 Page : 1/6 Responsable : Nicolas GREFFET Clé : V6.0.16 Révision : 8101 SSNL16 - Flambement élastoplastique d'une poutre droite
Titre : SSNL16 - Flambement élastoplastique d'une poutre [...] Date : 15/1/011 Page : 1/6 Responsable : Nicolas GREFFET Clé : V6.0.16 Révision : 8101 SSNL16 - Flambement élastoplastique d'une poutre droite
DUT. Informatique, orientation Imagerie Numérique. Domaine : Sciences, Technologies, Santé. Mention : Informatique
 DUT Informatique, orientation Imagerie Numérique Domaine : Sciences, Technologies, Santé Mention : Informatique Organisation : Institut Universitaire de Technologie Lieu de formation : Le Puy en Velay
DUT Informatique, orientation Imagerie Numérique Domaine : Sciences, Technologies, Santé Mention : Informatique Organisation : Institut Universitaire de Technologie Lieu de formation : Le Puy en Velay
Un K-espace vectoriel est un ensemble non vide E muni : d une loi de composition interne, c est-à-dire d une application de E E dans E : E E E
 Exo7 Espaces vectoriels Vidéo partie 1. Espace vectoriel (début Vidéo partie 2. Espace vectoriel (fin Vidéo partie 3. Sous-espace vectoriel (début Vidéo partie 4. Sous-espace vectoriel (milieu Vidéo partie
Exo7 Espaces vectoriels Vidéo partie 1. Espace vectoriel (début Vidéo partie 2. Espace vectoriel (fin Vidéo partie 3. Sous-espace vectoriel (début Vidéo partie 4. Sous-espace vectoriel (milieu Vidéo partie
Introduction à MATLAB R
 Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
TP SIN Traitement d image
 TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
TP SIN Traitement d image Pré requis (l élève doit savoir): - Utiliser un ordinateur Objectif terminale : L élève doit être capable de reconnaître un format d image et d expliquer les différents types
L INTEGRATION D UN NOUVEAU COLLABORATEUR
 L INTEGRATION D UN NOUVEAU COLLABORATEUR «Rien ne sert de bien sélectionner, il faut aussi savoir intégrer à point!» Si un recrutement réussi dépend avant toute chose d une solide procédure de sélection,
L INTEGRATION D UN NOUVEAU COLLABORATEUR «Rien ne sert de bien sélectionner, il faut aussi savoir intégrer à point!» Si un recrutement réussi dépend avant toute chose d une solide procédure de sélection,
Des interfaces textuelles aux interfaces graphiques
 Informatique Graphique Cours 1 - Introduction Introduction L'informatique graphique (ou infographie) est presque aussi vieille que l'informatique (elle date des premiers écrans cathodiques). Elle concerne
Informatique Graphique Cours 1 - Introduction Introduction L'informatique graphique (ou infographie) est presque aussi vieille que l'informatique (elle date des premiers écrans cathodiques). Elle concerne
Comment créer un diagramme de Gantt avec OpenOffice.org
 Comment créer un diagramme de Gantt avec OpenOffice.org Version 1.9 du 05.05.2005 Réalisé avec : OOo 2.0 Plate-forme / Os : Toutes Distribué par le projet Sommaire 1 Une rapide introduction : Diagramme
Comment créer un diagramme de Gantt avec OpenOffice.org Version 1.9 du 05.05.2005 Réalisé avec : OOo 2.0 Plate-forme / Os : Toutes Distribué par le projet Sommaire 1 Une rapide introduction : Diagramme
CHAPITRE IV Oscillations libres des systèmes à plusieurs degrés de liberté
 CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Vue 2D / 3D / Dessin / Cotation Utilise : Logiciel edrawings Fichier.EPRT Dossier Tp-eDrawings
 Vue 2D / 3D / Dessin / Cotation Utilise : Logiciel edrawings.eprt Dossier Tp-eDrawings TP EDRAWINGS INITIATION A LA CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO) Les icônes Zoom au mieux pour obtenir un affichage
Vue 2D / 3D / Dessin / Cotation Utilise : Logiciel edrawings.eprt Dossier Tp-eDrawings TP EDRAWINGS INITIATION A LA CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO) Les icônes Zoom au mieux pour obtenir un affichage
Cours de mathématiques
 DEUG MIAS premier niveau Cours de mathématiques année 2003/2004 Guillaume Legendre (version révisée du 3 avril 2015) Table des matières 1 Éléments de logique 1 1.1 Assertions...............................................
DEUG MIAS premier niveau Cours de mathématiques année 2003/2004 Guillaume Legendre (version révisée du 3 avril 2015) Table des matières 1 Éléments de logique 1 1.1 Assertions...............................................
Paris et New-York sont-ils les sommets d'un carré?
 page 95 Paris et New-York sont-ils les sommets d'un carré? par othi Mok (3 ), Michel Vongsavanh (3 ), Eric hin (3 ), iek-hor Lim ( ), Eric kbaraly ( ), élèves et anciens élèves du ollège Victor Hugo (2
page 95 Paris et New-York sont-ils les sommets d'un carré? par othi Mok (3 ), Michel Vongsavanh (3 ), Eric hin (3 ), iek-hor Lim ( ), Eric kbaraly ( ), élèves et anciens élèves du ollège Victor Hugo (2