Vers une extension pour la simulation des systèmes multi corps pour la robotique et la commande.
|
|
|
- Roger Émond
- il y a 10 ans
- Total affichages :
Transcription
1 Siconos/Multibody. Vers une extension pour la simulation des systèmes multi corps pour la robotique et la commande. Campagne ADT 2012 Récapitulatif (1 page max en tout) Titre & Acronyme : Siconos/Multibody. Vers une extension pour la simulation des systèmes multi corps pour la robotique et la commande. Porteur de l ADT : Vincent Acary Courriel : [email protected] CRI : Grenoble Rhône Alpes. EPI : Il s agit d une nouvelle ADT pour deux ans : Les partenaires internes (EPI/CRI) et externes (autres labos, industriels) de l ADT : EPI BIPOP. Responsable Bernard Brogliato. [email protected] Contact Vincent Acary. [email protected] Oui Collaborations extérieures: ANSYS, Schneider Electric, Trasys Space Budget : (3 mois) (12 mois) (9 mois) Total Budget (en ke) Total des ressources demandées pour l ADT : 0.8 ETP (ingénieur SED) 2 ETP (Ingénieur Jeune Diplômé) Total des ressources demandées pour la 1ère année : 0.4 ETP (ingénieur SED) 1 ETP (Ingénieur Jeune Diplômé) Résumé : Cette demande d ADT concerne la conception architecturale et le développement d une bibliothèque de simulation des systèmes multi corps rigides et flexibles. Partant d un prototype déjà développé au cours de l ANR Saladyn (Appel ANR COSINUS 2008), il s agit de repenser l architecture du prototype, d en augmenter ses fonctionnalités et d améliorer sa généricité et de répondre à trois principales applications : la simulation des disjoncteurs électriques en collaboration avec Schneider Electric, la simulation et la commande des rovers martiens et lunaires avec TRASYS SPACE ainsi que le développement de nouveaux algorithmes avec ANSYS. En termes de fonctionnalités, on souhaite renforcer les liens entre les modèles mécaniques de Siconos et les moteurs géométriques et de détection de collision. En termes d architecture, on veillera à proposer une structure modulaire avec des API ouvertes pour pouvoir s adapter à différents outils de visualisation, de CAO et de détection de collision.

2 Siconos/Multibody 2 1 Introduction (10 lignes max en tout) Cette demande d ADT concerne la conception architecturale et le développement d une bibliothèque de simulation des systèmes multi corps rigides et flexibles. Partant d un prototype déjà développé au cours de l ANR Saladyn (Appel ANR COSINUS 2008), il s agit de repenser l architecture du prototype, d en augmenter ses fonctionnalités et d améliorer sa générosité et de répondre à trois principales applications : la simulation des disjoncteurs électriques en collaboration avec Schneider Electric, la simulation et la commande des rovers martiens et lunaires avec TRASYS SPACE ainsi que le développement de nouveaux algorithmes avec ANSYS. En termes de fonctionnalités, on souhaite renforcer les liens des modèles mécaniques lagrangiens et de Newton/Euler de Siconos avec des descriptions textuelles de systèmes (XML/Python) de mécanismes et avec les moteurs géométriques et de détection de collision. En termes d architecture, on veillera à proposer une structure modulaire avec des API ouvertes pour pouvoir s adapter à différents outils de visualisation, de CAO et de détection de collision.

3 Siconos/Multibody 3 2 Contexte : état des lieux ( 1 2 page min, 2 pages max) 2.1 Contexte scientifique Les systèmes dynamiques non réguliers qui préoccupent l équipe-projet BIPOP de l INRIA Rhône Alpes, rassemblent l ensemble des systèmes qui, d une part, comportent des discontinuités dans leur évolution en temps et qui, d autre part utilisent des lois multivaluées non différentiables pour décrire leur comportement. Les systèmes mécaniques soumis à des contraintes unilatérales et des impacts sont un exemple caractéristique de systèmes dynamiques non réguliers pour lesquels le projet BIPOP possède déjà une grande expérience. Les circuits électroniques avec des composants idéaux ou linéaires par morceaux, une partie des systèmes hybrides sont eux aussi des systèmes dynamiques non réguliers pour lesquels le projet a entamé des travaux de recherche depuis plus de 5 ans. Les compétences du projet sont de deux ordres : l une théorique en analyse mathématique et en contrôle de ces systèmes, l autre concerne les aspects de la simulation numérique avec le développement de la plate-forme de calcul scientifique Siconos. 1 Pour ce qui intéresse cette ADT, les applications principales sont développées au travers des collaborations industrielles suivantes : ANSYS (Leader mondial en simulation mécanique). Thèse CIFRE ( ) sur les méthodes numériques pour la simulation de systèmes mécaniques. ANSYS a entrepris depuis 5 ans le développement d un simulateur de systèmes mécaniques rigides et a fait appel à nous pour développer les algorithmes de contact frottant et les méthodes de résolution en temps. Dans le cadre de cette thèse un nouveau prototype commun sera développé. Il s agira a travers cette ADT d implémenter les solutions optimales dans logiciel maison afin de pérenniser le savoir faire Bipop sur ces sujets. Schneider Electric. Thèse sur financement industriel ( ) sur la simulation de disjoncteurs électriques (cf. Figure 2.1). La poursuite des développements du prototype Saladyn permettra d envisager un transfert vers un éditeur logiciel (projet GRAVIT envisagé) TRASYS/Space. Intégration d un simulateur de systèmes mécaniques pour les rovers lunaires et martiens ainsi que du bras robotique MSST (cf. Figure 2.3). Pour la validation des commandes des systèmes robotiques en mission spatiale, l ESA (Agence Spatiale Européenne) est aujourd hui à la recherche d un moteur de simulation dynamique apte à s intégrer dans un environnement informatique complexe comportant la visualisation, la gestion des commande et des tâches et la simulation système (mécanique, thermique, puissance, commande, environnement virtuel,...). 1 Pour plus de détails, on pourra consulter les références suivantes : [1] V. Acary & B. Brogliato Numerical Methods for Nonsmooth Dynamical Systems: Applications in Mechanics and Electronics Lecture Notes in Applied and Computational Mechanics. Vol. 36, Springer Verlag. 540 p [ ] [2] V. Acary, O. Bonnefon & B. Brogliato Nonsmooth Modeling and Simulation for Switching Circuits Springer, Lecture Notes in Electrical Engineering, Vol. 69, 2010

4 Siconos/Multibody 4 Une sortie de cette ADT permettrait une première évaluation des outils INRIA/Bipop et des principaux moteurs de détection de collision dans ce contexte. 2.2 Contexte technologique Dans le cadre du projet européen SICONOS IST ( ) coordonné par B. Brogliato, un des objectifs principaux a été la conception et le développement d une plate-forme de calcul scientifique pour les systèmes dynamiques non réguliers (Work package 2, responsable. V. Acary). Les fonctionnalités de cette plate-forme sont la modélisation, l analyse, la simulation et le contrôle des systèmes dynamiques non réguliers. Après ce projet européen, cet effort de développement a été poursuivi à travers des applications en électronique, mécanique et commande des systèmes. Les fonctionnalités supplémentaires ont été implémentées au cours du projet ANR VAL-AMS 2. La conception et le développement de la plate-forme se sont inscrits dans une démarche de qualité logicielle afin d obtenir un logiciel distribuable et qui fédère des développements. Ce travail s est basé sur les normes d assurance qualité de l agence spatiale européenne (ESA) et sur les recommandations de développement de l INRIA. Siconos est désormais l outil de base dans deux projets ANR : Saladyn (Appel COSINUS ) coordonné par V. Acary 3 et Chaslim (Appel Blanc ) coordonné par B. Brogliato Architecture et fonctionnalités La plate-forme est constituée d un noyau de modélisation et de simulation. Les routines numériques (Siconos/Numerics) sont en Fortran 77 et en C pour des raisons de performance. Cette bibliothèque d outils numériques est surmontée d un module en C++ (environ lignes) (Siconos/Kernel) se chargeant de la modélisation et du pilotage les simulations. L interface de commande (Siconos/Front-end) en mode expert est aujourd hui en Python et pour les utilisateurs finaux, une toolbox Scilab a été initiée. Les extensions de fonctionnalités de la plate-forme sont en cours de réalisation sur les aspects commande des systèmes dynamiques non réguliers (Siconos/Control). Sur la Figure 2.1, un organigramme montre comment la plate-forme Siconos est organisée. On peut utiliser directement la librairie grâce au Front-End ou alors utiliser un modeleur dédié à une application scientifique capable de générer un modèle d équations pour Siconos via une interface. Si on se focalise sur la Mécanique, un prototype de bibliothèque de simulation de multi corps a été développé au sein du projet Saladyn. Ce prototype utilise Siconos comme moteur de calcul, propose une librairie de modélisation des mécanismes multi corps avec liaisons parfaites, jeux, contact, impact et frottement. Il est lié à la librairie professionnelle 2 Partenaires : VERIMAG LJK. Objectif. Vérification pour les circuits électriques commutés. 3 Partenaires : LMGC (UMR CNRS/Université de Montpellier II) LAMSID (UMR CNRS/EDF) et des partenaires industriels : Schneider Electric, EDF Objectif : couplage des codes Siconos, LMGC90 et Code_Aster (EDF) et intégration dans Salome en vue d une plate-forme intégrée de simulation des systèmes mécaniques multi corps et multi contact 4 Partenaires : EPI NON-A INRIA Lille, IRCyn Nantes. Objectif : Vers une toolbox pour la commande à modes glissants.
. Les fonctionnalités de cette plate-forme sont la modélisation, l analyse, la simulation et le contrôle des systèmes dynamiques non réguliers.")
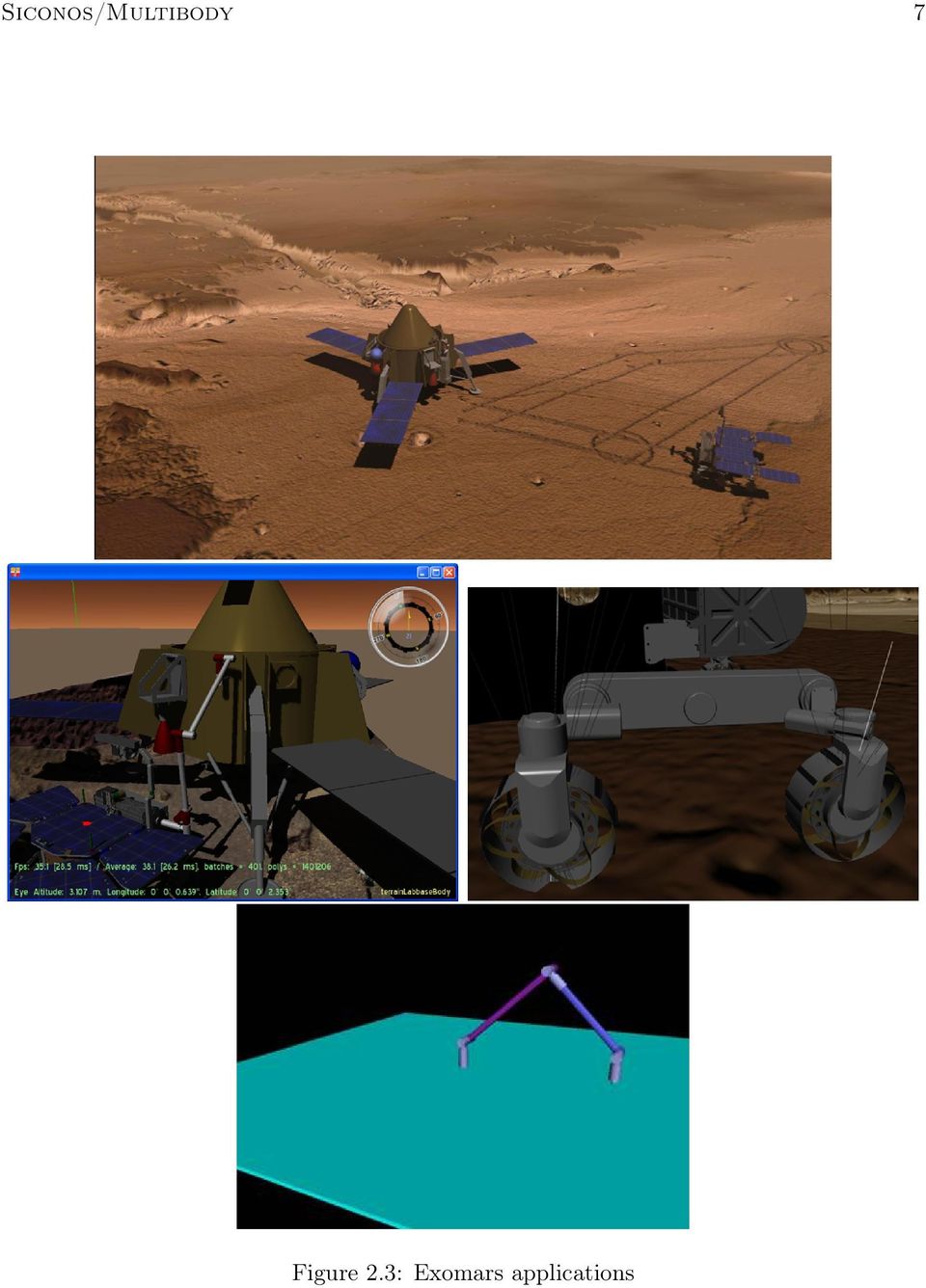
5 Siconos/Multibody 5 Electrical Modeler Hybrid systems modeler Mechanical Modeler Dynamical system modeler Siconos/Front end Siconos/Kernel Siconos/Numerics Figure 2.1: Siconos Environment de CAO Opencascade. Sur la figure 2.2, la modélisation et la simulation d un disjoncteur C60 de Schneider Electric grâce au prototype sont représentées. Sur le figure 2.3, des exemples d applications de Trasys sont illustrées. La simulation et la modélisation du bras robotique sur la dernière image ont été faites avec Siconos et un rapport a été remis à l ESA sur ce sujet Positionnement par rapport à l existant La plate-forme Siconos est née de la longue expérience de la simulation des systèmes dynamiques non réguliers dans le domaine de la Mécanique. En particulier, le logiciel LMGC90, développé à Montpellier est le fruit de 20 années de travail dans cette direction. Le principal inconvénient de ce logiciel est qu il est fermé à d autres applications des sciences de l ingénierie et en particulier à son utilisation par des ingénieurs en modélisation qui souhaiteraient aborder d autres domaines. Un des objectifs de la plate-forme est d ouvrir le champ d application de ces méthodes. L autre objectif est l emploi de méthodes modernes de génie logiciel pour la conception, le développement et la maintenance de la plate-forme. Pour ce qui est de la simulation des systèmes multi corps, il existe très peu de codes open-source hormis MbDyn 5 développé au Politecnico di Milano mais qui ne gère pas le contact avec frottement. Pour ce qui est des codes commerciaux, il n y a pas pour le moment de codes capables de simuler des systèmes avec du contact, du frottement de Coulomb pour des systèmes 3D. C est ce qui fait l intérêt de nos collaborateurs industriels. 5

; (a) C60 Schneider Electric s Circuit")
 Contacts and joints with clearances. (e) Reaction on the hook (f) Reaction on the handle Figure 2.")
6 Siconos/Multibody 6 NewtonEulerDS(q01,v01,OCCm,OCCI1); PivotJointR(Part1,Part2,P2,A2); PrismaticJointR(beam3,axe1); OCCRelation // Geometrical computation from the CAD model NewtonImpactNSL(e); (a) C60 Schneider Electric s Circuit Breaker. (b) Modeling as a multibody system. (c) Multibody system in our prototype. (d) Contacts and joints with clearances. (e) Reaction on the hook (f) Reaction on the handle Figure 2.2: Modeling and simulation of a Circuit breaker
 Contacts and joints with clearances. (e) Reaction on the hook (f) Reaction on the handle Figure 2.")
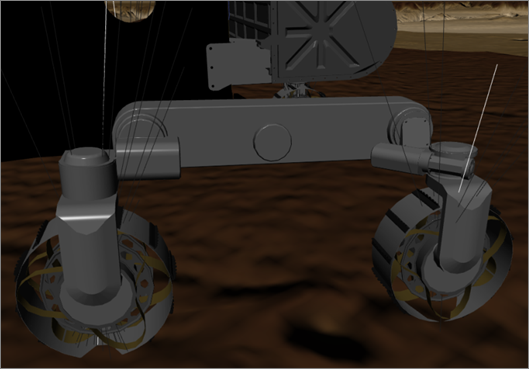
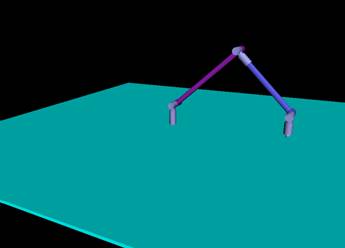
7 7 Siconos/Multibody Figure 2.3: Exomars applications
8 Siconos/Multibody 8 3 Objectifs de l ADT (10 lignes max en tout) Voici les objectifs principaux de cette ADT : 1. Refonte de l architecture et intégration du prototype développé dans le cadre de Saladyn au sein de l environnement Siconos pour créer Siconos/Multibody. Assurer la cohérence et le respect de l architecture entre les différents développements dans les projets associés: collaborations industrielles, thèses et projets ANR. Pérenniser le savoir faire au sein de Bipop à travers du code et de la documentation en vue de la collaboration avec ANSYS. 2. Définition et développement des API génériques en lien avec les moteurs géométriques, de détection de collision et de visualisation. (Bullet, OpenCascade, Ogre, Asys, PhysX,... ). En particulier, le lien entre les différents formalismes mécaniques et leurs paramètrisations possibles (Lagrange, Newton/Euler, Calcul récursif, ) et les outils de détection de collision et moteurs géométriques sera réalisé. 3. Validation sur des applications industrielles : Intégration dans un environnement professionnel de simulation, de visualisation et de contrôle des systèmes robotiques pour le spatial et simulation des disjoncteurs électriques.

9 Siconos/Multibody 9 4 Sortie : positionnement après l ADT (1 page min, 3 pages max) A la sortie de l ADT, on souhaite disposer d un outil de simulation des systèmes multi corps bien documenté et suffisamment générique pour pouvoir s appuyer sur plusieurs bibliothèques de détection de collision, de modeleurs géométriques et d environnement intégré de modélisation, de visualisation et de commande. 4.1 Impact scientifique L intérêt scientifique d un tel outil logiciel est la validation sur des applications industrielles des méthodes numériques et des lois de commandes développées dans Bipop 6. Cet outil nous permettra en effet d avoir accès et de traiter des exemples qui ne sont pas simplement des exemples académiques simples (Chaînes cinématiques complexes, problèmes mal conditionnés, contraintes temps de calcul/temps réel/embarqué,... ). De plus, une confrontation avec les problèmes industriels a toujours intérêt en termes de retombées plus fondamentales. De plus sur les aspects commande, il permettrait de tester des commandes par modes glissant sur des systèmes mécaniques avec contact (Collaboration en cours avec Yuri Orlov, CICESE, Mexique) Intérêt stratégique Concernant notre collaboration avec ANSYS, l existence d un tel outil suffisamment évolué en termes d API permet de garder le savoir faire en interne et de faire progresser nos outils pour garder la longueur d avance que nous avons avant la thèse CIFRE engagée avec eux. En termes de propriété intellectuelle le travail avec un éditeur logiciel est toujours compliqué. Avoir un développement indépendant, de qualité et proche en termes de fonctionnalités d ANSYS est un argument intéressant. 6 voir pour cela 1. Higher order event capturing time stepping schemes for nonsmooth multibody systems with unilateral constraints and impacts. Vincent Acary Applied Numerical Mathematics, Elsevier, 2011, To appear. 2. A formulation of the linear discrete Coulomb friction problem via convex optimization Vincent Acary; Florent Cadoux; Claude Lemarechal; Jérôme Malick ZAMM / Z angew Math Mech; Zeitschrift für Angewandte Mathematik und Mechanik, Wiley, 2011, 91 (2), pp A Nonsmooth Newton Solver for Capturing Exact Coulomb Friction in Fiber Assemblies Florence Bertails-Descoubes; Florent Cadoux; Gilles Daviet; Vincent Acary ACM Transactions on Graphics, ACM, Timestepping schemes for nonsmooth dynamics based on discontinuous Galerkin methods: definition and outlook Thorsten Schindler; Vincent Acary [Research Report], RR Chattering-free digital sliding-mode control with state observer and disturbance rejection Vincent Acary; Bernard Brogliato; Yuri Orlov IEEE Transactions on Automatic Control, IEEE, 2011, In Press

10 Siconos/Multibody Débouchés technologiques La liste de débouchés technologiques et des verrous levés par un tel outil est longue. Citons dans ce qui suit ceux qui nous intéressent le plus. On rappelle que ces applications ne peuvent pas être aujourd hui traitées sans un environnement logiciel robuste et efficace ayant un lien fort vers les bibliothèques de collision et de visualisation déjà existantes Un moteur de simulation intégré pour des mécanismes 3D Comme on l a rappelé dans le paragraphe précèdent, il n y a pas aujourd hui de logiciel libre ou privé capables de remplir ces fonctionnalités. Pourtant, la demande est très forte de par le nombre grandissant d applications en sciences de l ingénierie : Mécanismes (disjoncteurs, horlogerie, machines outils, MEMS/NEMS,...), procédés industriels (fabrications de clips, tamis, vibreurs, trieurs), Robotique (robotique humanoïde, spatiale, industrielle, machines agricoles,... ), transports (transmission et direction automobile, dynamique des bogies ferroviaires, trains d atterrissage,...) et énergie (éoliennes, turbines, vannes,... ). Pour notre application principale dans ce domaine, la simulation des disjoncteurs électriques avec Schneider Electric, il s agit a travers cette ADT de montrer que l on peut répondre avec cet outil de simulation aux problèmes que les experts se posent dans leurs bureau d études. Le prototype qui existe aujourd hui a déjà été validé par la business Unit, Power de Schneider (Michel Abadie, Eybens). Il est aussi évalué par la direction de l innovation (Emmanuel Frangin, Alice Boussagol, Grenoble) pour planifier la suite à donner à ce projet (projet GRAVIT, soutien direct, lobbying auprès d un éditeur (ANSYS, ProEngineer,...)) Un outil de simulation et de validation des lois de commandes pour les systèmes robotiques spatiaux L aspect simulation de la commande pour ces systèmes non réguliers serait aussi nouveau. Il n existe pas de toolbox de simulation mécanique intégrant une partie commande. L ESA a aujourd hui besoin d un tel outil et commence une phase de veille technologique sur ce sujet. On souhaite pouvoir se placer comme un acteur crédible d un point de vue logiciel. Dans le contexte de la préparation de futures missions de l ESA pour l exploration planétaire Européenne (Missions : ExoMars, Mars Sample Return, Moon exploration), Trasys développe un outil de spécification des opérations de systèmes robotiques associés. Ces systèmes sont les rovers d exploration du terrain mais également les instruments pour prélever des échantillons où les bras manipulateurs pour manipuler les échantillons et les instruments. La spécification des missions nécessite un outil de modélisation 3D qui intègre des librairies de détection de contacts et s interface avec des outils de modélisation et de résolution de modèles dynamiques de systèmes articulés avec des contacts. 4.4 Public visé, diffusion, transfert, innovation A travers cette plate-forme, il s agit avant tout de fédérer une communauté d utilisateurs et de développeurs autour d un outil de simulation de systèmes mécaniques non réguliers.

11 Siconos/Multibody 11 Dans un second temps, il s agit de fournir un support technique pérenne des ingénieurs experts et doctorants des projets ANR et industriels pour ce qui concerne le coeur de la plate-forme Siconos. Enfin, il s agira de proposer un prototype pre industriel pour envisager sereinement un transfert vers un éditeur logiciel (Projet GRAVIT,...) Le logiciel Siconos a fait l objet de deux dépôts A.P.P. et est distribué sous licence GPL. Les développements envisagés dans cet ADT seront aussi distribués en open source sous licence GPL. La possibilité d un système de double licensing n est pas à exclure. 4.5 Mode de gestion après l ADT Le logiciel résultant sera maintenu dans le giron de Siconos (portage et validation sur Pipol chaque nuit, suivi de bugs et distribution sur la forge). Il restera avant tout un prototype pré industriel servant les collaborations et les développements de Bipop. Comme pour Siconos., on tâchera d animer une communauté open source, de se rapprocher des outils open sources (Sage, pythonocc, PAL, bullet) pour élargir le spectre des utilisateurs. Une valorisation par l INRIA n est pas a exclure mais elle se fera sûrement avec une implantation nouvelle et complète du logiciel et un changement de licence.

12 Siconos/Multibody 12 5 Mise en œuvre prévisionnelle de l ADT 5.1 Identification des rôles et organisation Définition des différents rôles correspondant à des types de tâches identifiées: Responsable de l ADT et la valorisation: Vincent Acary Responsable(s) technique(s) : Maurice Brémond Conception et Développement : Ingénieur Jeune Diplômé Responsable des développements applications en lien SE : DO Hong ha (Ingenieur expert Saladyn) Responsable des développements applications en lien Trasys/Space : Roger Pissard Responsable des développements applications en lien ANSYS : Vincent Acary EPI BIPOP : Vincent ACARY (CR1), travaille sur les méthodes numériques pour la dynamique non régulière. Il est le principal maître d œuvre de la plate-forme Siconos. Il sera le responsable de l ADT et veillera à la bonne coordination du projet. Hong Ha Nguyen DO(IE), ingénieur expert INRIA sur le projet Saladyn, travaille sur l interface entre Siconos et le prototype de simulation de systèmes multi corps. Mounia Haddouni, (These CIFRE), doctorante en collaboration avec ANSYS sur les méthodes numériques pour les mécanismes Narendra Akhadkar (Thèse INRIA), doctorant financé sur contrat de recherche avec Schneider Electric sur la simulation des disjoncteurs électriques. SED Rhône Alpes Ingénieur SED (IR) travaillera une partie de son temps sur les objectifs de l ADT et sera responsable technique de l ADT Ingénieur Jeune Diplômé (IJD) Étant donne la taille de cette ADT, il est difficile et sûrement illusoire de mettre en place un plan d assurance qualité complet comme cela a été fait pour Siconos 8 et Saladyn. Le risque est que le rédacteur des rapports de validation soit aussi celui qui a défini le plan de validation, ce qui en termes de qualité est mauvais. Il sera privilégié un mode de gestion plus simple. Cependant, les mesures suivantes seront suivies : Le suivi du planning se fera par le responsable de l ADT au cours des réunions d avancement qui seront bi mensuelles. Les livrables seront semestriels et coïncideront avec les jalons et la fin de séries de tâches. 8
, travaille sur les méthodes")
13 Siconos/Multibody 13 Les jalons, les tâches et les livrables portant sur la validation du logiciel sur des applications industrielles se feront conjointement avec nos collaborateurs industriels. Le rôle de l ingénieur SED est crucial dans la réussite de cette ADT. Il permet en effet de maintenir la cohérence des nouveaux développements, de veiller a la mise en oeuvre des bonnes pratiques en termes de développement et de conseiller l IJD sur les choix technologiques les plus adaptés. Dans le cas où la demande d IJD serait refusée, le projet serait réaménagé. Avec l aide d un IR (40% ETP) du SED, le travail pourrait être alors restreint à l objectif 1 sans les aspects pérennisation des travaux avec ANSYS et l objectif 3 sans les applications Schneider Electric. On se focalisera sur les tâches 1.a, 1.b, 2.a, 3.d et 6.b et les développements resteront plus confidentiels. Le principal risque n est pas technique mais humain et concerne le recrutement d un ingenieur qui doit être réalisé dans les temps et qui doit rester sur le temps de l ADT. 5.2 Planification prévisionnelle La démarche générale reposera sur les principes de méthodes agiles en privilégiant des itérations de conception & développement relativement court, l intégration des utilisateurs dans ces itérations et la légèreté des process. Coté programmation objet, on recommandera d utiliser les patrons de conception. L ensemble des tâches est décrit dans le tableau 1. Leur dépendance mutuelle est spécifíee. Leur organisation dans leur temps est évidente à la lecture du tableau. Cet ensemble de tâches contribue aux objectifs de la façon suivante : Objectif 1: Tâches 0.a, 0.b, 1.a, 1.b, 2.a, 3.d. Objectif 2: Tâches 2.b, 2.c, 2.d, 3.a, 3.b, 3.c, 4.a, 4.b, 4.c, 5.b, 5.c. Objectif 3: Tâches 6.a, 6.b, Les tâches de coordination, d animation et gestion du projet ne sont explicitées ici. Elles sont assurées par le responsable de l ADT. Les jalons suivants sont définis afin de faire le point général sur le projet et de n engager la phase suivante que si tout va bien: Jalon 1 T0+6: Refonte du prototype Saladyn et Conception architecturale Tâches accomplies : de 0.a à 1.d, Commentaire : On veillera à une bonne appropriation des outils et des méthodes. Jalon 2 T0+9: Conception architecturale Tâches accomplies : de 2.a à 2.d, Commentaire : On veillera à la faisabilité des développements en regard des ressources limitées. Travail de conception en étroite collaboration avec nos partenaires.

14 Siconos/Multibody 14 Jalon 3 T0+12: Développement et validation de la version 1.0 Tâches accomplies : de 3.a à 4.d, Commentaire : Le développement devra se faire de manière conjointe autant que faire se peut. Jalon 5 T0+18: Développement de la version 2.0 et validation Tâches accomplies : de 5.a à 5.d, Commentaire : Le développement devra se faire de manière conjointe autant que faire se peut. Jalon 6 T0+24: Validations industrielles Tâches accomplies : de 6.a et 6.b, Commentaire : Travail en étroite collaboration avec nos partenaires Intervention des partenaires extérieurs. Trasys propose d assurer une compatibilité de son outil 3D avec Siconos. Ceci nécessite le développement d une API générique qui permettrait de faire une abstraction du moteur dynamique tenant en compte finement des phénomènes de contact. Cette compatibilité permettrait de démontrer la capacité de Siconos de traiter des exemples variés dans un nouveau domaine d application. Il permettrait également de comparer ses performances avec d autres moteurs. Schneider Electric met à notre disposition des modèles géométriques et mécaniques de disjoncteurs et participera à la validation des outils à deux niveaux: Calcul scientifique : une validation de la qualité numérique des résultats sera faite par des experts de la direction de l innovation. Interface informatique : une validation de l ergonomie de l outil sera faite par une ingénieur design de Power business et par le doctorant Schneider Electric.

15 Tâche Description Ressources (HM) # / Objectifs Aspects scientifiques. 0.a Apprentissage des méthodes et des outils 1 0.b Formulation des modèles mécaniques en lien avec leur géométrie en vues de la détection de collision et de leur visualisation 1(CR) 2(Doc) 3 Intégration du proto Saladyn dans Siconos/Multibody 1.a Intégration du prototype dans l environnement Siconos. Passage a Cmake, Ctest, 0 5 Cpack et test sur Cdash. 1(IR) 1.b Portage Linux, MacOSX, Windows. 1.a 6 Conception architecturale 2.a Revue et nouvelle architecture interne : Amélioration des structures objets, restructuration des modules et des classes 1(IR) 1(CR) 2.b Définition des API entrée/sortie pour le module des modèles mécaniques 0.25(CR) 2.c Définition des API entrée/sortie pour le module de détection de collision. Analyse des bibliothèques existantes et abstraction d une interface 0.25(CR) dépendance date butoir (T0+) 2.a 9 2.a 9 2.a 9 Siconos/Multibody 15
 1(CR) 2.")
16 2.d Définition des API entrée/sortie pour le module de calcul géométrique. Analyse des bibliothèques existantes et abstraction d une interface Développement de la version a Développement de la version 1.0 des API entrée/sortie pour le module des modèles mécaniques. Analyse des bibliothèques existantes et abstraction d une interface. Lien avec les bibliothèques et développement des composants internes. 3.b Développement de la version 1.0 des API entrée/sortie pour le module de détection de collision. 3.c Développement de la version 1.0 des API entrée/sortie pour le module de calcul géométrique 3.d Développement de la version 1.0 des liens entre les modèles mécaniques et les outils géométriques et de collision Validation de la version a Validation de la version 1.0 des API entrée/sortie pour le module des modèles mécaniques sur une unique librairie de modèles mécaniques : modèles généré par le générateur d Humans 4.b Validation de la version 1.0 des API entrée/sortie pour le module de détection de collision sur un unique moteur de collision : bullet 4.c Validation de la version 1.0 des API entrée/sortie pour le module de calcul géométrique sur un unique moteur de calcul géométrique : OpenCascade Version (CR) 2.a 9 2.b 12 2.c 12 2.d 12 1(IR) 0.25(CR) 0.25(CR) 0.25(CR) 1(IE) 2.b 2.c 2.d 12 3.a 15 3.b 15 3.b 15 Siconos/Multibody 16

17 5.a Validation et modification éventuelle de l API pour d autres librairies de modèles mécaniques (Simpy, description textuelle XML,...) 5.b Validation et modification éventuelle de l API pour d autres librairies de détection de collision 5.c Validation et modification éventuelle de l API pour d autres librairies de calcul géométriques 0.25(CR) 0.25(CR) 0.25(CR) 1(IE) Liens avec les applications et validation industrielles 6.a Validation et modification éventuelle pour les exemples industriels Schneider Electric 2(IJD) 0.5(CR) 3(IE) 3(Doc) 6.b Validation et modification éventuelle pour les exemples industriels TRASYS Space 2(IJD) 0.5(CR) Table 1: Listes des tâches 4.a 18 4.b 18 4.c 18 5.b 5.c 5.a 5.b 5.c Siconos/Multibody 17
 0.5(CR) 3(IE) 3(Doc) 6.")
18 Siconos/Multibody 18 6 Ressources ( 1 2 page minimum, page maximum) 6.1 Ressources humaines Ressources humaines nécessaires à la réalisation de l ADT : Ressources humaines mobilisées directement au sein de BIPOP : Vincent Acary (CR1) 20 % Hong ha Do (IE) 20 % Narendra Akhakar (Doc) 20% Mounia Haddouni participation ponctuelle pour la validation des API Ressources humaines en CDD demandées dans le cadre de cet appel: Ingénieur jeune diplomé (100%) : ingénieur diplômé en informatique/mathématiques appliquées avec des connaissances en modèles physiques et en mécanique. Ressources humaines demandées en provenance des services de l Inria : Ingénieur SED 40% ETP Les feuilles de route sont déductibles directement du tableau car il n y a pas d ambiguïté sur les intervenants. 6.2 Aspects budgétaires Ressources demandées (en ke) 2012 (3 mois) versement 1 en sept.-oct (12 mois) versement 2 et 3 en jan.-fév. et mai-juin 2014 (9 mois) versement 4 en jan.-fév. Total Missions Animation Matériel scientifique Prestations externes Autre (préciser) TOTAL Ressources disponibles Total (en ke) Missions Animation Matériel scientifique Stagiaires Prestations externes Autre (préciser) TOTAL

19 Siconos/Multibody 19 7 Suivi et évaluation ( 1 2 page minimum, 1 page maximum) Voici les éléments de suivi prévus : Livrables et version logicielle : 1. Jalon 1 Documentation de description des formulations mécaniques et de leur liens avec la géométrie. Paquets binaires pour L inox (debian, ubuntu,fedora), MacOsX 10.7 & Windows Jalon 2 Documentation de conception architecturale et fichiers headers des API. 3. Jalon 3 Version 1.0 et documentation doxygen 4. Jalon 4 Documentation de validation de la version 1.0 (rapports de tests et exécution des use cases ) 5. Jalon 5 Version 2.0 et documentation doxygen. Documentation de validation de la version 2.0 (rapports de tests et exécution des use cases ) 6. Jalon 6 Documentation de validation des applications industrielles et manuel utilisateur Comptes rendus de réunion de validation avec les partenaires industrielles 1. Jalon 2 Réunion de validation de l architecture et des API avec Trasys Space et Schneider Electric 2. Jalon 4 Réunion de validation de la version 1.0 avec Trasys Space et Schneider Electric 3. Jalon 5 Réunion de validation de la version 2.0 avec Trasys Space et Schneider Electric 4. Jalon 6 Réunion de validation des applications industrielles avec Trasys Space et Schneider Electric Annexe A : Description des partenaires Présentation de l équipe-projet BIPOP La thématique de cette équipe-projet est centrée autour des systèmes dynamiques non réguliers et de leur modélisation, leur commande ainsi que leur simulation numérique. C est une équipe qui implique donc des travaux relevant de la mécanique non-régulière, de l automatique, de l optimisation non différentiable et de l analyse convexe (et/ou non régulière - "non- smooth" en anglais). Axes de recherche Les applications principales se trouvent dans les systèmes mécaniques (systèmes multicorps avec contraintes unilatérales, frottement, lois de comportement interfaciales non régulières) et électriques (circuits avec diodes, transistors MOS). Certains problèmes abstraits (comme la commande optimale avec contraintes sur l état, la commande prédictive généralisée) peuvent se mettre sous ce formalisme. Les domaines
 5. Jalon 5 Version 2.0 et documentation doxygen. Documentation de validation de la version 2.0 (rapports de tests et exécution des use cases ) 6.")
20 Siconos/Multibody 20 concernés sont, entre autres: automobile (commande, simulation), espace (commande, simulation), systèmes électromécaniques (modélisation, simulation), robotique (commande de robots marcheurs, jongleurs, sauteurs, coureurs, manipulation non-préhensile). Les problèmes ouverts sont encore très nombreux dans ce domaine, aussi bien au niveau théorique (théorie des systèmes - commandabilité, observabilité, stabilisation, analyse mathématique - existence, unicité, dépendance continue, modélisation - problèmes de chocs multiples, lois de contact non monotones), que des aspects numériques et logiciels. Responsable scientifique: Bernard BROGLIATO, [email protected], Annexe B : Description des logiciels Siconos Vincent Acary [email protected] Domaine: Mathématiques appliquées, calcul et simulation Thème Modélisation, optimisation et contrôle de systèmes dynamiques Dans le cadre du projet européen SICONOS IST ( ) coordonné par B. Brogliato, un des objectifs principaux a été la conception et le développement d une plate-forme de calcul scientifique pour les systèmes dynamiques non réguliers (Work package 2, responsable. V. Acary). Les fonctionnalités de cette plate-forme sont la modélisation, l analyse, la simulation et le contrôle des systèmes dynamiques non réguliers. Après ce projet européen, cet effort de développement a été poursuivi à travers des applications en électronique, mécanique et commande des systèmes. Les fonctionnalités supplémentaires ont été implémentées au cours du projet ANR VAL-AMS 9. La conception et le développement de la plate-forme se sont inscrits dans une démarche de qualité logicielle afin d obtenir un logiciel distribuable et qui fédère des développements. Ce travail s est basé sur les normes d assurance qualité de l agence spatiale européenne (ESA) et sur les recommandations de développement de l INRIA. Le logiciel Siconos a fait l objet de deux dépôts A.P.P. et est distribué sous licence GPL. Environnement : ligne de commande et interpréteur Python, OS : Linux, MacOsX Requirements: cppunit, boost, Libxml2 LAPACK/BLAS, MUMPS, swig, python, numpy Deux url principales : 1. documentation utilisateur documentation développeur et Prototype Multibody Saladyn 0 Vincent Acary [email protected] 9 Partenaires : VERIMAG LJK. Objectif. Vérification pour les circuits électriques commutés.
, que des aspects numériques et logiciels.")
21 Siconos/Multibody 21 Domaine: Mathématiques appliquées, calcul et simulation Thème Modélisation, optimisation et contrôle de systèmes dynamiques Prototype écrit dans le cadre du projet Saladyn par Olivier Bonnefon (Ingénieur expert INRIA sur projet Saladyn) & Vincent Acary pas de dépôt pour l instant, pas de distribution pas de licence. Environnement : ligne de commande et interpréteur Python, OS : Linux, MacOsX Requirements: OpenCascade, PythonOcc Annexe C : Bilan de l ADT Siconos ( ) Ingénierie sur l infrastruture logicielle Une infrastructure CMake a été mise en place pour cibler différents systèmes et plateformes matérielles afin d améliorer la portabilité et la diffusabilité du code. Les tests ont été automatisés sur la plateforme pipol. Il faut noter que les automatisations misent en place pour Siconos servent quotidiennement une douzaine de projets aujourd hui. Techniques de programmation, ingénierie autour de C++ et Python La gestion mémoire au sein du code C++ a été revue à l aide de techniques aujourd hui dans le standard C++11. Des patrons de conception offrent des solutions pour les articulations dans le code entre la simulation et la modélisation. L API publique C++ a été revue. L API Python développée met l accent sur l interaction simple avec les bibiliothèques numériques numpy et scipy et la possibilité d héritage de Python depuis C++ pour prototyper des méthodes directement. Un nouveau module d entrée-sortie permet la sérialisation entière de la mémoire sur disque pour des re-démarrages à froid. Ingénierie algorithmique Les structure de données pour décrire les modélisations de systèmes et d intéractions ont été redéfinies avec des graphes dynamiques. L implémentation utilise la "boost graph library". La construction du problème non régulier à partir de ce graphe ne bloque pas le passage à l échelle. Au niveau des solveurs numériques, un solveur global "Alart et Curnier" a été implémenté autour de la résolution de systèmes linéaires par le logiciel MUMPS en vue de la résolution de problèmes issus de modélisation par éléments finis. La génération automatique de code C pour le calcul de gradients a été réalisée à partir de sympy. Enfin, des travaux ont été menés pour développer un prototype de gestion de collision en lien avec une librairie externe (Bullet). Ces travaux serviront de base pour l objectif 1 de cette ADT.
pythonocc: une plateforme de développement agile d applications CAO.
 pythonocc: une plateforme de développement agile d applications CAO. PyConFR 2009 Cité des Sciences et de l Industrie, Paris Thomas Paviot*, Jelle Feringa* *pythonocc project: [email protected]; [email protected]
pythonocc: une plateforme de développement agile d applications CAO. PyConFR 2009 Cité des Sciences et de l Industrie, Paris Thomas Paviot*, Jelle Feringa* *pythonocc project: [email protected]; [email protected]
SALOME l écosystème l offre de support
 SALOME l écosystème l offre de support 400 visites par jour 50 téléchargements par jour 16000 users sur le forum. 4000 actifs Les Objectifs Favoriser l accès aux outils de simulations open-source à l industrie...
SALOME l écosystème l offre de support 400 visites par jour 50 téléchargements par jour 16000 users sur le forum. 4000 actifs Les Objectifs Favoriser l accès aux outils de simulations open-source à l industrie...
ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab
 ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab notre compétence d'éditeur à votre service créée en juin 2010, Scilab enterprises propose services et support autour
ÉdIteur officiel et fournisseur de ServIceS professionnels du LogIcIeL open Source ScILab notre compétence d'éditeur à votre service créée en juin 2010, Scilab enterprises propose services et support autour
Stage Ingénieur en développement logiciel/modélisation 3D
 Ingénieur en développement logiciel/modélisation 3D Schlumberger recrute un(e) stagiaire ingénieur en modélisation 3D pour la plate-forme Petrel. Vous serez intégré(e) au sein d une équipe innovante, Petrel
Ingénieur en développement logiciel/modélisation 3D Schlumberger recrute un(e) stagiaire ingénieur en modélisation 3D pour la plate-forme Petrel. Vous serez intégré(e) au sein d une équipe innovante, Petrel
W4 - Workflow La base des applications agiles
 W4 - Workflow La base des applications agiles, W4 [email protected] Vous avez dit «workflow»? Processus : Enchaînement ordonné de faits ou de phénomènes, répondant à un certain schéma et
W4 - Workflow La base des applications agiles, W4 [email protected] Vous avez dit «workflow»? Processus : Enchaînement ordonné de faits ou de phénomènes, répondant à un certain schéma et
Évaluation des logiciels et autres réalisations
 DOCUMENT D ANALYSE DE LA COMMISSION D ÉVALUATION DE L INRIA Évaluation des logiciels et autres réalisations Préparé par David Margery, Jean-Pierre Merlet, Cordelia Schmid, Agnès Sulem, Paul Zimmermann
DOCUMENT D ANALYSE DE LA COMMISSION D ÉVALUATION DE L INRIA Évaluation des logiciels et autres réalisations Préparé par David Margery, Jean-Pierre Merlet, Cordelia Schmid, Agnès Sulem, Paul Zimmermann
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre.
 Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Contrôle par commande prédictive d un procédé de cuisson sous infrarouge de peintures en poudre. Isabelle Bombard, Bruno da Silva, Pascal Dufour *, Pierre Laurent, Joseph Lieto. Laboratoire d Automatique
Sujet de thèse CIFRE RESULIS / LGI2P
 Ecole des Mines d Alès Laboratoire de Génie Informatique et d Ingénierie de Production LGI2P Nîmes Sujet de thèse CIFRE RESULIS / LGI2P Titre Domaine De l ingénierie des besoins à l ingénierie des exigences
Ecole des Mines d Alès Laboratoire de Génie Informatique et d Ingénierie de Production LGI2P Nîmes Sujet de thèse CIFRE RESULIS / LGI2P Titre Domaine De l ingénierie des besoins à l ingénierie des exigences
Note de cadrage du PEPI MACS Mathématiques Appliquées & Calcul Scientifique
 Note de cadrage du PEPI MACS Mathématiques Appliquées & Calcul Scientifique Périmètre Le périmètre du PEPI concerne les méthodes et outils utilisés pour le traitement informatisé des données scientifiques.
Note de cadrage du PEPI MACS Mathématiques Appliquées & Calcul Scientifique Périmètre Le périmètre du PEPI concerne les méthodes et outils utilisés pour le traitement informatisé des données scientifiques.
Les lières. MSc in Electronics and Information Technology Engineering. Ingénieur civil. en informatique. MSc in Architectural Engineering
 Ingénieur civil Ingénieur civil Les lières MSc in Electronics and Information Technology Engineering MSc in Architectural Engineering MSc in Civil Engineering MSc in Electromechanical Engineering MSc
Ingénieur civil Ingénieur civil Les lières MSc in Electronics and Information Technology Engineering MSc in Architectural Engineering MSc in Civil Engineering MSc in Electromechanical Engineering MSc
Master Informatique Aix-Marseille Université
 Aix-Marseille Université http://masterinfo.univ-mrs.fr/ Département Informatique et Interactions UFR Sciences Laboratoire d Informatique Fondamentale Laboratoire des Sciences de l Information et des Systèmes
Aix-Marseille Université http://masterinfo.univ-mrs.fr/ Département Informatique et Interactions UFR Sciences Laboratoire d Informatique Fondamentale Laboratoire des Sciences de l Information et des Systèmes
Analyse,, Conception des Systèmes Informatiques
 Analyse,, Conception des Systèmes Informatiques Méthode Analyse Conception Introduction à UML Génie logiciel Définition «Ensemble de méthodes, techniques et outils pour la production et la maintenance
Analyse,, Conception des Systèmes Informatiques Méthode Analyse Conception Introduction à UML Génie logiciel Définition «Ensemble de méthodes, techniques et outils pour la production et la maintenance
Servir ses utilisateurs sans bureau d accueil physique
 Servir ses utilisateurs sans bureau d accueil physique Retour d expérience au Service IST d Inria Grenoble-Rhône-Alpes Gaëlle Rivérieux 2 juillet 2013 Introduction Quelques mots sur Inria Le service IST
Servir ses utilisateurs sans bureau d accueil physique Retour d expérience au Service IST d Inria Grenoble-Rhône-Alpes Gaëlle Rivérieux 2 juillet 2013 Introduction Quelques mots sur Inria Le service IST
ISTEX, vers des services innovants d accès à la connaissance
 ISTEX, vers des services innovants d accès à la connaissance Synthèse rédigée par Raymond Bérard, directeur de l ABES, à partir du dossier de candidature d ISTEX aux Initiatives d excellence et des réunions
ISTEX, vers des services innovants d accès à la connaissance Synthèse rédigée par Raymond Bérard, directeur de l ABES, à partir du dossier de candidature d ISTEX aux Initiatives d excellence et des réunions
L informatique en BCPST
 L informatique en BCPST Présentation générale Sylvain Pelletier Septembre 2014 Sylvain Pelletier L informatique en BCPST Septembre 2014 1 / 20 Informatique, algorithmique, programmation Utiliser la rapidité
L informatique en BCPST Présentation générale Sylvain Pelletier Septembre 2014 Sylvain Pelletier L informatique en BCPST Septembre 2014 1 / 20 Informatique, algorithmique, programmation Utiliser la rapidité
Rencontre sur la thématique du Calcul Haute Performance - 13 juin 2012. Better Match, Faster Innovation
 Better Match, Faster Innovation Rencontre sur la thématique du Calcul Haute Performance - 13 juin 2012 Meeting on the theme of High Performance Computing TABLE DES MATIÈRES Qu est ce qu un imatch? STI
Better Match, Faster Innovation Rencontre sur la thématique du Calcul Haute Performance - 13 juin 2012 Meeting on the theme of High Performance Computing TABLE DES MATIÈRES Qu est ce qu un imatch? STI
Travail collaboratif. Glossaire
 Glossaire Ajax Traduction anglaise : Ajax (Asynchronous JavaScript And XML) AJAX est un combiné de différents langages de développement Web comme XHTML, JavaScript ou XML, il est fréquemment utilisé pour
Glossaire Ajax Traduction anglaise : Ajax (Asynchronous JavaScript And XML) AJAX est un combiné de différents langages de développement Web comme XHTML, JavaScript ou XML, il est fréquemment utilisé pour
UFR d Informatique. FORMATION MASTER Domaine SCIENCES, TECHNOLOGIE, SANTE Mention INFORMATIQUE 2014-2018
 UFR d Informatique FORMATION MASTER Domaine SCIENCES, TECHNOLOGIE, SANTE Mention INFORMATIQUE 2014-2018 Objectif L UFR d informatique propose au niveau du master, deux spécialités sous la mention informatique
UFR d Informatique FORMATION MASTER Domaine SCIENCES, TECHNOLOGIE, SANTE Mention INFORMATIQUE 2014-2018 Objectif L UFR d informatique propose au niveau du master, deux spécialités sous la mention informatique
Logiciel Libre Cours 3 Fondements: Génie Logiciel
 Logiciel Libre Cours 3 Fondements: Génie Logiciel Stefano Zacchiroli [email protected] Laboratoire PPS, Université Paris Diderot 2013 2014 URL http://upsilon.cc/zack/teaching/1314/freesoftware/
Logiciel Libre Cours 3 Fondements: Génie Logiciel Stefano Zacchiroli [email protected] Laboratoire PPS, Université Paris Diderot 2013 2014 URL http://upsilon.cc/zack/teaching/1314/freesoftware/
Catalogue des stages Ercom 2013
 Catalogue des stages Ercom 2013 Optimisations sur Modem LTE Poste basé à : Caen (14) Analyse et optimisation des performances des traitements réalisés dans un modem LTE. - Profiling et détermination des
Catalogue des stages Ercom 2013 Optimisations sur Modem LTE Poste basé à : Caen (14) Analyse et optimisation des performances des traitements réalisés dans un modem LTE. - Profiling et détermination des
Mise en place d'une solution libre de gestion d'entreprise. Maurice MORETTI Directeur associé
 Mise en place d'une solution libre de gestion d'entreprise Maurice MORETTI Directeur associé Plan de la présentation Le contexte de l'erp OpenERP : Logiciel Libre Motivations / Critères de choix Méthodologie
Mise en place d'une solution libre de gestion d'entreprise Maurice MORETTI Directeur associé Plan de la présentation Le contexte de l'erp OpenERP : Logiciel Libre Motivations / Critères de choix Méthodologie
Filière MMIS. Modélisation Mathématique, Images et Simulation. Responsables : Stefanie Hahmann, Valérie Perrier, Zoltan Szigeti
 Filière MMIS Modélisation Mathématique, Images et Simulation Responsables : Stefanie Hahmann, Valérie Perrier, Zoltan Szigeti [email protected] Modélisation mathématique, Images et simulation (MMIS)
Filière MMIS Modélisation Mathématique, Images et Simulation Responsables : Stefanie Hahmann, Valérie Perrier, Zoltan Szigeti [email protected] Modélisation mathématique, Images et simulation (MMIS)
WEB15 IBM Software for Business Process Management. un offre complète et modulaire. Alain DARMON consultant avant-vente BPM [email protected].
 WEB15 IBM Software for Business Process Management un offre complète et modulaire Alain DARMON consultant avant-vente BPM [email protected] Claude Perrin ECM Client Technical Professional Manager
WEB15 IBM Software for Business Process Management un offre complète et modulaire Alain DARMON consultant avant-vente BPM [email protected] Claude Perrin ECM Client Technical Professional Manager
Monitoring continu et gestion optimale des performances énergétiques des bâtiments
 Monitoring continu et gestion optimale des performances énergétiques des bâtiments Alexandre Nassiopoulos et al. Journée d inauguration de Sense-City, 23/03/2015 Croissance de la demande énergétique et
Monitoring continu et gestion optimale des performances énergétiques des bâtiments Alexandre Nassiopoulos et al. Journée d inauguration de Sense-City, 23/03/2015 Croissance de la demande énergétique et
Journées PERF-RV 14-15 Octobre 2004. B. Arnaldi http://www.perfrv.org
 1 Journées PERF-RV 14-15 Octobre 2004 B. Arnaldi http://www.perfrv.org Objectifs de PERF-RV Plate-forme exploratoire Début des travaux : février 2001 Fin des travaux : août 2004 La réalité virtuelle, contexte
1 Journées PERF-RV 14-15 Octobre 2004 B. Arnaldi http://www.perfrv.org Objectifs de PERF-RV Plate-forme exploratoire Début des travaux : février 2001 Fin des travaux : août 2004 La réalité virtuelle, contexte
Logiciel Orgabat V.Net. Maîtrisez et valorisez vos infrastructures VDI et datacenter
 Logiciel Orgabat V.Net Maîtrisez et valorisez vos infrastructures VDI et datacenter Logiciel Orgabat V.Net Pour l exploitation au quotidien des salles de données et réseaux VDI Orgabat est le logiciel
Logiciel Orgabat V.Net Maîtrisez et valorisez vos infrastructures VDI et datacenter Logiciel Orgabat V.Net Pour l exploitation au quotidien des salles de données et réseaux VDI Orgabat est le logiciel
Intégration de l interface graphique de Ptidej dans Eclipse
 Intégration de l interface graphique de Ptidej dans Eclipse Driton Salihu ([email protected]) Lulzim Laloshi ([email protected]) Département d informatique et de recherche opérationnelle
Intégration de l interface graphique de Ptidej dans Eclipse Driton Salihu ([email protected]) Lulzim Laloshi ([email protected]) Département d informatique et de recherche opérationnelle
Évaluation et implémentation des langages
 Évaluation et implémentation des langages Les langages de programmation et le processus de programmation Critères de conception et d évaluation des langages de programmation Les fondations de l implémentation
Évaluation et implémentation des langages Les langages de programmation et le processus de programmation Critères de conception et d évaluation des langages de programmation Les fondations de l implémentation
Public. Débouchés. Les atouts du Master PIC. Statistiques des débouchés 22 % 16 % 10 % 14 % 38 % Entreprise Start-up Thèse.
 Contexte et enjeux Public Le management de l innovation, un champ en pleine mutation - Les thématiques des stratégies d innovation, de la conception des produits, de l organisation et de la conduite des
Contexte et enjeux Public Le management de l innovation, un champ en pleine mutation - Les thématiques des stratégies d innovation, de la conception des produits, de l organisation et de la conduite des
µrv : Realité Virtuelle
 µrv : Realité Virtuelle Edgar-Fernando ARRIAGA-GARCIA Charles-Henri BABIAUD Clément GRELLIER Quentin PETIT Jérôme Ricoeur Florent VIOLLEAU INSA Rennes 21 septembre 2011 1 / 15 Objectifs pour cette semaine
µrv : Realité Virtuelle Edgar-Fernando ARRIAGA-GARCIA Charles-Henri BABIAUD Clément GRELLIER Quentin PETIT Jérôme Ricoeur Florent VIOLLEAU INSA Rennes 21 septembre 2011 1 / 15 Objectifs pour cette semaine
Comment gérer toutes mes tâches logicielles d automatisation dans un seul environnement?
 Comment gérer toutes mes tâches logicielles d automatisation dans un seul environnement? Avec Totally Integrated Automation Portal : un seul environnement de développement intégré pour toutes vos tâches
Comment gérer toutes mes tâches logicielles d automatisation dans un seul environnement? Avec Totally Integrated Automation Portal : un seul environnement de développement intégré pour toutes vos tâches
T. Gasc 1,2,3, F. De Vuyst 1, R. Motte 3, M. Peybernes 4, R. Poncet 5
 Modélisation de la performance et optimisation d un algorithme hydrodynamique de type Lagrange-Projection sur processeurs multi-cœurs T. Gasc 1,2,3, F. De Vuyst 1, R. Motte 3, M. Peybernes 4, R. Poncet
Modélisation de la performance et optimisation d un algorithme hydrodynamique de type Lagrange-Projection sur processeurs multi-cœurs T. Gasc 1,2,3, F. De Vuyst 1, R. Motte 3, M. Peybernes 4, R. Poncet
GESTION DE PROJET. www.ziggourat.com - Tél : 01 44 61 96 00 N enregistrement formation : 11752861675
 GESTION DE PROJET www.ziggourat.com - Tél : 01 44 61 96 00 N enregistrement formation : 11752861675 Introduction à la Gestion de Projet... 3 Management de Projet... 4 Gestion de Projet informatique...
GESTION DE PROJET www.ziggourat.com - Tél : 01 44 61 96 00 N enregistrement formation : 11752861675 Introduction à la Gestion de Projet... 3 Management de Projet... 4 Gestion de Projet informatique...
Le Collège de France crée une chaire pérenne d Informatique, Algorithmes, machines et langages, et nomme le Pr Gérard BERRY titulaire
 Communiquédepresse Mars2013 LeCollègedeFrancecréeunechairepérenned Informatique, Algorithmes,machinesetlangages, etnommeleprgérardberrytitulaire Leçoninauguralele28mars2013 2009avait marquéunpas importantdans
Communiquédepresse Mars2013 LeCollègedeFrancecréeunechairepérenned Informatique, Algorithmes,machinesetlangages, etnommeleprgérardberrytitulaire Leçoninauguralele28mars2013 2009avait marquéunpas importantdans
Workflow et Service Oriented Architecture (SOA)
") White Paper Workflow et Service Oriented Architecture (SOA) Présentation Cet article offre une approche pragmatique de la SOA et du workflow à travers des problématiques d'entreprises, une méthodologie
White Paper Workflow et Service Oriented Architecture (SOA) Présentation Cet article offre une approche pragmatique de la SOA et du workflow à travers des problématiques d'entreprises, une méthodologie
Synergies entre Artisan Studio et outils PLM
 SysML France 13 Novembre 2012 William Boyer-Vidal Regional Sales Manager Southern Europe Synergies entre Artisan Studio et outils PLM 2012 2012 Atego. Atego. 1 Challenges & Tendances Complexité des produits
SysML France 13 Novembre 2012 William Boyer-Vidal Regional Sales Manager Southern Europe Synergies entre Artisan Studio et outils PLM 2012 2012 Atego. Atego. 1 Challenges & Tendances Complexité des produits
Profil d études détaillé. Section : Informatique et systèmes Finalité : Technologie de l informatique
 Section : Informatique et systèmes Finalité : Technologie de l informatique Page 1/6 1. Introduction L enseignement de la Haute Ecole Louvain en Hainaut donne la place centrale à l étudiant. Celui-ci trouvera
Section : Informatique et systèmes Finalité : Technologie de l informatique Page 1/6 1. Introduction L enseignement de la Haute Ecole Louvain en Hainaut donne la place centrale à l étudiant. Celui-ci trouvera
FEMAP. Environnement d analyse d ingénierie actuel le plus avancé. Des réponses pour l industrie.
 FEMAP Environnement d analyse d ingénierie actuel le plus avancé Des réponses pour l industrie. Simulation numérique de pointe Pourquoi utiliser la simulation numérique? La pression du marché, imposant
FEMAP Environnement d analyse d ingénierie actuel le plus avancé Des réponses pour l industrie. Simulation numérique de pointe Pourquoi utiliser la simulation numérique? La pression du marché, imposant
Joint AAL Information and Networking Day. 21 mars 2012
 Joint AAL Information and Networking Day 21 mars 2012 Présentation TéSA a pour objet : la mise en commun de moyens permettant de : rassembler et accueillir des doctorants ou post-doctorants dont les thèses
Joint AAL Information and Networking Day 21 mars 2012 Présentation TéSA a pour objet : la mise en commun de moyens permettant de : rassembler et accueillir des doctorants ou post-doctorants dont les thèses
Outils pour les réseaux de neurones et contenu du CD-Rom
 Outils pour les réseaux de neurones et contenu du CD-Rom Depuis le développement théorique des réseaux de neurones à la fin des années 1980-1990, plusieurs outils ont été mis à la disposition des utilisateurs.
Outils pour les réseaux de neurones et contenu du CD-Rom Depuis le développement théorique des réseaux de neurones à la fin des années 1980-1990, plusieurs outils ont été mis à la disposition des utilisateurs.
GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET
 GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET 1 Tianxiao LIU Licence Professionnelle Réseaux & Sécurité Université de Cergy-Pontoise http://depinfo.u-cergy.fr/~tliu/lpg.php PLAN Objectif et
GESTION DE PROJET SÉANCE 2 : LES CYCLE DE VIE D'UN PROJET 1 Tianxiao LIU Licence Professionnelle Réseaux & Sécurité Université de Cergy-Pontoise http://depinfo.u-cergy.fr/~tliu/lpg.php PLAN Objectif et
AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES
 1 AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES 2 Axes de recherche L activité du DIM LSC concerne la méthodologie de la conception et le développement de systèmes à forte
1 AXES DE RECHERCHE - DOMAINE D'INTERET MAJEUR LOGICIELS ET SYSTEMES COMPLEXES 2 Axes de recherche L activité du DIM LSC concerne la méthodologie de la conception et le développement de systèmes à forte
Présentation du PL/SQL
 I Présentation du PL/ Copyright Oracle Corporation, 1998. All rights reserved. Objectifs du Cours A la fin de ce chapitre, vous saurez : Décrire l intéret du PL/ Décrire l utilisation du PL/ pour le développeur
I Présentation du PL/ Copyright Oracle Corporation, 1998. All rights reserved. Objectifs du Cours A la fin de ce chapitre, vous saurez : Décrire l intéret du PL/ Décrire l utilisation du PL/ pour le développeur
ARCHEOVISION. Centre de Ressources Numériques 3D. UMR 5607 du CNRS. R. Vergnieux IR-CNRS
 ARCHEOVISION Centre de Ressources Numériques 3D R. Vergnieux IR-CNRS UMR 5607 du CNRS Archéovision CNRS Caroline Delevoie (AI cnrs Coordination - 2D) Bruno Dutailly (IE cnrs Dev. 3D) Robert Vergnieux (IR
ARCHEOVISION Centre de Ressources Numériques 3D R. Vergnieux IR-CNRS UMR 5607 du CNRS Archéovision CNRS Caroline Delevoie (AI cnrs Coordination - 2D) Bruno Dutailly (IE cnrs Dev. 3D) Robert Vergnieux (IR
Proposition de sujet de thèse CIFRE EUROCOPTER / LGI2P
 EUROCOPTER SAS Groupe EADS Marignane Ecole des Mines d Alès Laboratoire de Génie Informatique et d Ingénierie de Production LGI2P Nîmes Proposition de sujet de thèse CIFRE EUROCOPTER / LGI2P Titre Domaine
EUROCOPTER SAS Groupe EADS Marignane Ecole des Mines d Alès Laboratoire de Génie Informatique et d Ingénierie de Production LGI2P Nîmes Proposition de sujet de thèse CIFRE EUROCOPTER / LGI2P Titre Domaine
Accélérer l agilité de votre site de e-commerce. Cas client
 Accélérer l agilité de votre site de e-commerce Cas client L agilité «outillée» devient nécessaire au delà d un certain facteur de complexité (clients x produits) Elevé Nombre de produits vendus Faible
Accélérer l agilité de votre site de e-commerce Cas client L agilité «outillée» devient nécessaire au delà d un certain facteur de complexité (clients x produits) Elevé Nombre de produits vendus Faible
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Le Processus RUP. H. Kadima. Tester. Analyst. Performance Engineer. Database Administrator. Release Engineer. Project Leader. Designer / Developer
 Le Processus RUP Database Administrator Project Leader H. Kadima Performance Engineer Release Engineer Analyst Designer / Developer Tester Table des matières 1. De l artisanat à l industrialisation de
Le Processus RUP Database Administrator Project Leader H. Kadima Performance Engineer Release Engineer Analyst Designer / Developer Tester Table des matières 1. De l artisanat à l industrialisation de
Master of Science in Engineering www.hes-so.ch/mse
 Présentation du MSE [email protected] Master of Science in Engineering www.hes-so.ch/mse 1 Bachelors et Masters HES professionnalisant + de responsabilités Master HES-SO Bachelor HES-SO Compétences
Présentation du MSE [email protected] Master of Science in Engineering www.hes-so.ch/mse 1 Bachelors et Masters HES professionnalisant + de responsabilités Master HES-SO Bachelor HES-SO Compétences
11 Février 2014 Paris nidays.fr. ni.com
 11 Février 2014 Paris nidays.fr 1 Choisir la bonne architecture logicielle pour automatiser les systèmes de test Jérémy Charavet Ingénieur d Applications, National Instruments France Une architecture logicielle
11 Février 2014 Paris nidays.fr 1 Choisir la bonne architecture logicielle pour automatiser les systèmes de test Jérémy Charavet Ingénieur d Applications, National Instruments France Une architecture logicielle
Identification du module
 Identification du module Numéro de module 475 Titre Développer une analyse pour une application Compétence Développer à partir des exigences fonctionnelles et non fonctionnelles pour une application, les
Identification du module Numéro de module 475 Titre Développer une analyse pour une application Compétence Développer à partir des exigences fonctionnelles et non fonctionnelles pour une application, les
PROST PROST. L'ERP qui intègre la gestion commerciale Sage
 L'ERP qui intègre la gestion commerciale Sage intègre la gestion commerciale de Sage (ligne 30 et 100) et s appuie sur les données commerciales (ventes et achats) pour organiser la gestion de production.
L'ERP qui intègre la gestion commerciale Sage intègre la gestion commerciale de Sage (ligne 30 et 100) et s appuie sur les données commerciales (ventes et achats) pour organiser la gestion de production.
Modèle de changement d organisation. Leanpizza.net présente. Petit Guide Rapide du jeu de cartes Modèle de Changement d Organisation
 Guide rapide Leanpizza.net présente Petit Guide Rapide du jeu de cartes Modèle de Changement d Organisation v1.0 Rédacteur : Olivier Lafontan Traduction : Yannick Quenec hdu Date : 29 juin 2010 - Guide
Guide rapide Leanpizza.net présente Petit Guide Rapide du jeu de cartes Modèle de Changement d Organisation v1.0 Rédacteur : Olivier Lafontan Traduction : Yannick Quenec hdu Date : 29 juin 2010 - Guide
Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante.
 Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante. Objectifs et formulation du sujet Le syndrome de l apnée du sommeil (SAS) est un problème de santé publique
Sujet 1 : Diagnostique du Syndrome de l apnée du sommeil par des techniques d analyse discriminante. Objectifs et formulation du sujet Le syndrome de l apnée du sommeil (SAS) est un problème de santé publique
creo elements/pro creo elements/direct creo elements/view
 creo elements/pro SERVICES & SUPPORT PROCESSUS & INITIATIVES creo elements/direct creo elements/view SOLUTIONS MÉTIER creo elements/pro 5.0 PRODUITS LOGICIELS creo elements/direct 17.0 creo elements/view
creo elements/pro SERVICES & SUPPORT PROCESSUS & INITIATIVES creo elements/direct creo elements/view SOLUTIONS MÉTIER creo elements/pro 5.0 PRODUITS LOGICIELS creo elements/direct 17.0 creo elements/view
Architecture d'entreprise : Guide Pratique de l'architecture Logique
 Guides Pratiques Objecteering Architecture d'entreprise : Guide Pratique de l'architecture Logique Auteur : Version : 1.0 Copyright : Softeam Equipe Conseil Softeam Supervisée par Philippe Desfray Softeam
Guides Pratiques Objecteering Architecture d'entreprise : Guide Pratique de l'architecture Logique Auteur : Version : 1.0 Copyright : Softeam Equipe Conseil Softeam Supervisée par Philippe Desfray Softeam
Présentation de solutions de Progiciels de Gestion d'epn Forum des Usages Brest 2010
 Présentation de solutions de Progiciels de Gestion d'epn Forum des Usages Brest 2010 Damien Maillard Emmanuel Mayoud Jérôme Lamache EPNadmin OpenEPN GENEPI OpenEPN EPNadmin GENEPI EPNadmin Objectifs initiaux
Présentation de solutions de Progiciels de Gestion d'epn Forum des Usages Brest 2010 Damien Maillard Emmanuel Mayoud Jérôme Lamache EPNadmin OpenEPN GENEPI OpenEPN EPNadmin GENEPI EPNadmin Objectifs initiaux
GRID MIP. Plate-forme de développement de la Simulation Numérique au service de la Région Midi-Pyrénées. [email protected]
 GRID MIP Plate-forme de développement de la Simulation Numérique au service de la Région Midi-Pyrénées Plan Développement industriel et simulation numérique (3-9) Projet pilote GRID MIP conduit avec le
GRID MIP Plate-forme de développement de la Simulation Numérique au service de la Région Midi-Pyrénées Plan Développement industriel et simulation numérique (3-9) Projet pilote GRID MIP conduit avec le
L externalisation de vos logiciels entreprises : une solution aux problèmes de coûts, de sécurités et de réactivités
 Bureau Virtuel L externalisation de vos logiciels entreprises : une solution aux problèmes de coûts, de sécurités et de réactivités Que ce soit par la communication, par les échanges ou par la collaboration,
Bureau Virtuel L externalisation de vos logiciels entreprises : une solution aux problèmes de coûts, de sécurités et de réactivités Que ce soit par la communication, par les échanges ou par la collaboration,
LES TECHNOLOGIES DE L INFORMATION ET DE LA COMMUNICATION
 République Algérienne Démocratique et Populaire Ministère du Développement Industriel et de la Promotion de l Investissement LES TECHNOLOGIES DE L INFORMATION ET DE LA COMMUNICATION PROGRAMME NATIONAL
République Algérienne Démocratique et Populaire Ministère du Développement Industriel et de la Promotion de l Investissement LES TECHNOLOGIES DE L INFORMATION ET DE LA COMMUNICATION PROGRAMME NATIONAL
Retour d expérience RATP. Intégrer le test de performance au cœur du processus de développement agile. Challenges, techniques, résultats.
 Retour d expérience RATP Intégrer le test de performance au cœur du processus de développement agile. Challenges, techniques, résultats. Les intervenants Alexis Bourgeois Chef de projet MOE (front web)
Retour d expérience RATP Intégrer le test de performance au cœur du processus de développement agile. Challenges, techniques, résultats. Les intervenants Alexis Bourgeois Chef de projet MOE (front web)
Optimisation et programmation mathématique. Professeur Michel de Mathelin. Cours intégré : 20 h
 Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Télécom Physique Strasbourg Master IRIV Optimisation et programmation mathématique Professeur Michel de Mathelin Cours intégré : 20 h Programme du cours d optimisation Introduction Chapitre I: Rappels
Les bonnes pratiques d un PMO
 Livre Blanc Oracle Avril 2009 Les bonnes pratiques d un PMO Un plan évolutif pour construire et améliorer votre Bureau des Projets Une construction progressive La première étape consiste à déterminer les
Livre Blanc Oracle Avril 2009 Les bonnes pratiques d un PMO Un plan évolutif pour construire et améliorer votre Bureau des Projets Une construction progressive La première étape consiste à déterminer les
Alexandre Buge Epitech 5 Promo 2004. Soutenance de stage du 01/03/2004 au 31/08/2004
 Alexandre Buge Epitech 5 Promo 2004 Soutenance de stage du 01/03/2004 au 31/08/2004 15 Septembre 2004 Sommaire 1 Introduction : présentation de l entreprise 2 Développement au sein de Skyrecon Les API
Alexandre Buge Epitech 5 Promo 2004 Soutenance de stage du 01/03/2004 au 31/08/2004 15 Septembre 2004 Sommaire 1 Introduction : présentation de l entreprise 2 Développement au sein de Skyrecon Les API
l E R P s a n s l i m i t e
 l ERP sans limite 2 Le groupe Divalto, solutions de gestion pour toutes les entreprises 30% du chiffre d affaires en R&D Créé en 1982, le groupe Divalto propose des solutions de gestion adaptées à toutes
l ERP sans limite 2 Le groupe Divalto, solutions de gestion pour toutes les entreprises 30% du chiffre d affaires en R&D Créé en 1982, le groupe Divalto propose des solutions de gestion adaptées à toutes
Architecte Logiciel. Unité de formation 1 : Développer en s appuyant sur les modèles et les frameworks 7 semaines
 page 1/5 Titre professionnel : Inscrit au RNCP de Niveau I (Bac + 5) (J.O. du 07/02/09) 17 semaines Unité 1 : Développer en s appuyant sur les modèles et les frameworks 7 semaines Java EE : Frameworks
page 1/5 Titre professionnel : Inscrit au RNCP de Niveau I (Bac + 5) (J.O. du 07/02/09) 17 semaines Unité 1 : Développer en s appuyant sur les modèles et les frameworks 7 semaines Java EE : Frameworks
Communiqué de Lancement. Sage Intégrale V4.50
 Communiqué de Lancement Sage Intégrale V4.50 Nouvelle Version Majeure Avec près de 3000 entreprises clientes, l Intégrale est le Progiciel de Gestion Intégré le plus déployé en France, ce qui révèle toutes
Communiqué de Lancement Sage Intégrale V4.50 Nouvelle Version Majeure Avec près de 3000 entreprises clientes, l Intégrale est le Progiciel de Gestion Intégré le plus déployé en France, ce qui révèle toutes
Des solutions d analyse par éléments finis haut de gamme pour l environnement Windows. www.siemens.com/plm/femap
 Femap: Des solutions d analyse par éléments finis haut de gamme pour l environnement Windows Siemens PLM Software www.siemens.com/plm/femap Le développement de produits exceptionnels qui répondent aux
Femap: Des solutions d analyse par éléments finis haut de gamme pour l environnement Windows Siemens PLM Software www.siemens.com/plm/femap Le développement de produits exceptionnels qui répondent aux
Retour d expériences avec UML
 Retour d expériences avec UML UML pour les systèmes biologiques Marie-Hélène Moirez-Charron, UMR AGIR, équipe MAGE INRA Toulouse mailto:[email protected] PLAN Contexte de travail UML,
Retour d expériences avec UML UML pour les systèmes biologiques Marie-Hélène Moirez-Charron, UMR AGIR, équipe MAGE INRA Toulouse mailto:[email protected] PLAN Contexte de travail UML,
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Jade. Projet Intelligence Artificielle «Devine à quoi je pense»
 Jade Projet Intelligence Artificielle «Devine à quoi je pense» Réalisé par Djénéba Djikiné, Alexandre Bernard et Julien Lafont EPSI CSII2-2011 TABLE DES MATIÈRES 1. Analyse du besoin a. Cahier des charges
Jade Projet Intelligence Artificielle «Devine à quoi je pense» Réalisé par Djénéba Djikiné, Alexandre Bernard et Julien Lafont EPSI CSII2-2011 TABLE DES MATIÈRES 1. Analyse du besoin a. Cahier des charges
TutoJRES Outils et Services Collaboratifs
 1 TutoJRES Outils et Services Collaboratifs Retour d expérience ZIMBRA 23 mars 2011 [email protected] Sommaire 2 A l origine Constats Etude outils collaboratifs en 2009 Objectifs du projet Zimbra
1 TutoJRES Outils et Services Collaboratifs Retour d expérience ZIMBRA 23 mars 2011 [email protected] Sommaire 2 A l origine Constats Etude outils collaboratifs en 2009 Objectifs du projet Zimbra
Programme "Conception et simulation" COSINUS Edition 2009. Projet
 Projet Numéro d'ordre du projet : Acronyme du projet : Titre du projet : Coordonnateur du projet (nom/laboratoire) : Thématique principale : Montant total de l'aide demandée (en k ) : Durée du projet :
Projet Numéro d'ordre du projet : Acronyme du projet : Titre du projet : Coordonnateur du projet (nom/laboratoire) : Thématique principale : Montant total de l'aide demandée (en k ) : Durée du projet :
Calcul Scientifique avec 3
 ENSAM Bordeaux juin 2015 Calcul Scientifique avec 3 Installation - Prise en main Jean-Luc Charles - Éric Ducasse Arts & Métiers ParisTech, I2M "la programmation doit être un plaisir...", G. van Rossum
ENSAM Bordeaux juin 2015 Calcul Scientifique avec 3 Installation - Prise en main Jean-Luc Charles - Éric Ducasse Arts & Métiers ParisTech, I2M "la programmation doit être un plaisir...", G. van Rossum
La plate-forme DIMA. Master 1 IMA COLI23 - Université de La Rochelle
 La plate-forme DIMA Master 1 IMA COLI23 - Université de La Rochelle DIMA Bref aperçu Qu'est-ce? Acronyme de «Développement et Implémentation de Systèmes Multi-Agents» Initié par Zahia Guessoum et Jean-Pierre
La plate-forme DIMA Master 1 IMA COLI23 - Université de La Rochelle DIMA Bref aperçu Qu'est-ce? Acronyme de «Développement et Implémentation de Systèmes Multi-Agents» Initié par Zahia Guessoum et Jean-Pierre
Rapport d activité. Mathieu Souchaud Juin 2007
 Rapport d activité Mathieu Souchaud Juin 2007 Ce document fait la synthèse des réalisations accomplies durant les sept premiers mois de ma mission (de novembre 2006 à juin 2007) au sein de l équipe ScAlApplix
Rapport d activité Mathieu Souchaud Juin 2007 Ce document fait la synthèse des réalisations accomplies durant les sept premiers mois de ma mission (de novembre 2006 à juin 2007) au sein de l équipe ScAlApplix
Plateforme de capture et d analyse de sites Web AspirWeb
 Projet Java ESIAL 2A 2009-2010 Plateforme de capture et d analyse de sites Web AspirWeb 1. Contexte Ce projet de deuxième année permet d approfondir par la pratique les méthodes et techniques acquises
Projet Java ESIAL 2A 2009-2010 Plateforme de capture et d analyse de sites Web AspirWeb 1. Contexte Ce projet de deuxième année permet d approfondir par la pratique les méthodes et techniques acquises
PTC, THE PRODUCT DEVELOPMENT COMPANY. Créer de la valeur. en optimisant les processus
 SERVICES ET SUPPORT PROCESSUS ET INITIATIVES PTC, THE PRODUCT DEVELOPMENT COMPANY PRODUITS LOGICIELS SOLUTIONS MÉTIER Créer de la valeur en optimisant les processus Leader mondial de la technologie de
SERVICES ET SUPPORT PROCESSUS ET INITIATIVES PTC, THE PRODUCT DEVELOPMENT COMPANY PRODUITS LOGICIELS SOLUTIONS MÉTIER Créer de la valeur en optimisant les processus Leader mondial de la technologie de
GL - 2 2.2 Processus de développement Cycles de vie
 GL - 2 2.2 Processus de développement Cycles de vie Lydie du Bousquet [email protected] En collaboration avec J.-M. Favre, Ph. Lalanda, I. Parissis, Y. Ledru 1 Plan Introduction Modèles en cascade
GL - 2 2.2 Processus de développement Cycles de vie Lydie du Bousquet [email protected] En collaboration avec J.-M. Favre, Ph. Lalanda, I. Parissis, Y. Ledru 1 Plan Introduction Modèles en cascade
Présentation du cursus Animateur de Cluster et de réseaux territoriaux Etat du 14 avril 2013
 MASTER ANIMATEUR DE CLUSTER ET DE RESEAUX TERRITORIAUX PRESENTATION DU DIPLOME FRANCO-ALLEMAND 1. OBJECTIFS DE LA FORMATION ET COMPETENCES A ACQUERIR: Former des animateurs de cluster et de réseaux territoriaux
MASTER ANIMATEUR DE CLUSTER ET DE RESEAUX TERRITORIAUX PRESENTATION DU DIPLOME FRANCO-ALLEMAND 1. OBJECTIFS DE LA FORMATION ET COMPETENCES A ACQUERIR: Former des animateurs de cluster et de réseaux territoriaux
Les Eléments clés du projet
 THE GLOBAL LEADER IN CLOUD BI & CPM Les Eléments clés du projet 1 THE GLOBAL LEADER IN CLOUD BI & CPM Les Eléments clés du projet Périmètre fonctionnel 2 Le Core Model Le point central de constitution
THE GLOBAL LEADER IN CLOUD BI & CPM Les Eléments clés du projet 1 THE GLOBAL LEADER IN CLOUD BI & CPM Les Eléments clés du projet Périmètre fonctionnel 2 Le Core Model Le point central de constitution
UE 8 Systèmes d information de gestion Le programme
 UE 8 Systèmes d information de gestion Le programme Légende : Modifications de l arrêté du 8 mars 2010 Suppressions de l arrêté du 8 mars 2010 Partie inchangée par rapport au programme antérieur Indications
UE 8 Systèmes d information de gestion Le programme Légende : Modifications de l arrêté du 8 mars 2010 Suppressions de l arrêté du 8 mars 2010 Partie inchangée par rapport au programme antérieur Indications
Usine Numérique Intégration Produit Production
 Usine Numérique Intégration Produit Production Bernard Hoessler Manufacturing Business Group EMEA Paris 25 Novembre 2010 Du monde virtuel au monde réél Page 2 Stratégie développée dans l industrie Exploiter
Usine Numérique Intégration Produit Production Bernard Hoessler Manufacturing Business Group EMEA Paris 25 Novembre 2010 Du monde virtuel au monde réél Page 2 Stratégie développée dans l industrie Exploiter
Catalogue des formations Edition 2015
 Antidot - Formations Catalogue des formations Edition 2015 : catalogue_formation_2015 Révision du 06.01.2015 Sommaire!!"##$%&'( )! $*$+,(-'(."##'+.'&( /!,'.0+"1"2%'( /!!."3'( /! $(3&"3"!(-4(5(.$,$1"24'(-'!(6"&#$,%"+!(7('-%,%"+()89:(;(
Antidot - Formations Catalogue des formations Edition 2015 : catalogue_formation_2015 Révision du 06.01.2015 Sommaire!!"##$%&'( )! $*$+,(-'(."##'+.'&( /!,'.0+"1"2%'( /!!."3'( /! $(3&"3"!(-4(5(.$,$1"24'(-'!(6"&#$,%"+!(7('-%,%"+()89:(;(
Forthcoming Database
 DISS.ETH NO. 15802 Forthcoming Database A Framework Approach for Data Visualization Applications A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZURICH for the degree of Doctor of
DISS.ETH NO. 15802 Forthcoming Database A Framework Approach for Data Visualization Applications A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZURICH for the degree of Doctor of
Des solutions de croissance pour les PME du logiciel
 Des solutions de croissance pour les PME du logiciel Maillage 3D adapté à l écoulement d air à l arrière d un avion supersonique Vous êtes dirigeant de PME de la filière logicielle et conscient que l innovation
Des solutions de croissance pour les PME du logiciel Maillage 3D adapté à l écoulement d air à l arrière d un avion supersonique Vous êtes dirigeant de PME de la filière logicielle et conscient que l innovation
SIMAX Service. CRM : - Gestion des contacts - Gestion des clients (professionnels ou particuliers) - Gestion des opportunités
 - Gestion des opportunités") SIMAX Service SIMAX Service est un logiciel préconfiguré pour répondre en standard aux besoins d une société de service B2B ou B2C. SIMAX étant le logiciel le plus paramétrable au monde, il est très facile
SIMAX Service SIMAX Service est un logiciel préconfiguré pour répondre en standard aux besoins d une société de service B2B ou B2C. SIMAX étant le logiciel le plus paramétrable au monde, il est très facile
Figure 3.1- Lancement du Gambit
 3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
3.1. Introduction Le logiciel Gambit est un mailleur 2D/3D; pré-processeur qui permet de mailler des domaines de géométrie d un problème de CFD (Computational Fluid Dynamics).Il génère des fichiers*.msh
NOVA BPM. «Première solution BPM intégr. Pierre Vignéras Bull R&D
 NOVA BPM «Première solution BPM intégr grée» Pierre Vignéras Bull R&D Définitions Business Process Pratiques existantes qui permettent aux personnes et systèmes de travailler ensemble Business Process
NOVA BPM «Première solution BPM intégr grée» Pierre Vignéras Bull R&D Définitions Business Process Pratiques existantes qui permettent aux personnes et systèmes de travailler ensemble Business Process
PEPI GPI (Gestion de Projet Informatique) - Note de Cadrage décembre 2010 -
 - Note de Cadrage décembre 2010 -") I N S T I T U T N A T IO N A L D E L A R E C H E R C H E A G R O N O M I Q U E Pepi Gestion de Projets Informatiques PEPI GPI (Gestion de Projet Informatique) - Note de Cadrage décembre 2010-1 Préambule...
I N S T I T U T N A T IO N A L D E L A R E C H E R C H E A G R O N O M I Q U E Pepi Gestion de Projets Informatiques PEPI GPI (Gestion de Projet Informatique) - Note de Cadrage décembre 2010-1 Préambule...
L organisation interne et la gestion des ressources humaines. Un outil d aide à la structuration
 L organisation interne et la gestion des ressources humaines Un outil d aide à la structuration Sommaire 1 L organisation interne de l association 2 1.1. Clarifier les rôles et missions de chacun 2 1.2.
L organisation interne et la gestion des ressources humaines Un outil d aide à la structuration Sommaire 1 L organisation interne de l association 2 1.1. Clarifier les rôles et missions de chacun 2 1.2.
B-COMM. ERP 4 HR Access. Solutions d acquisition des temps de travail pour la gestion des temps et des activités d HR Access
 B-COMM ERP 4 HR Access Solutions d acquisition des temps de travail pour la gestion des temps et des activités d HR Access HR Access et Kaba un partenariat à fort potentiel Depuis plus de 10 ans, nous
B-COMM ERP 4 HR Access Solutions d acquisition des temps de travail pour la gestion des temps et des activités d HR Access HR Access et Kaba un partenariat à fort potentiel Depuis plus de 10 ans, nous
PROCONCEPT EASY START
 PROCONCEPT EASY START Découvrez les avantages d une solution logicielle Suisse, développée spécialement pour couvrir l ensemble des besoins des PME DÉVELOPPÉE PAR UNE PME POUR LES PME Avec ProConcept Easy
PROCONCEPT EASY START Découvrez les avantages d une solution logicielle Suisse, développée spécialement pour couvrir l ensemble des besoins des PME DÉVELOPPÉE PAR UNE PME POUR LES PME Avec ProConcept Easy
physicien diplômé EPFZ originaire de France présentée acceptée sur proposition Thèse no. 7178
 Thèse no. 7178 PROBLEMES D'OPTIMISATION DANS LES SYSTEMES DE CHAUFFAGE A DISTANCE présentée à l'ecole POLYTECHNIQUE FEDERALE DE ZURICH pour l'obtention du titre de Docteur es sciences naturelles par Alain
Thèse no. 7178 PROBLEMES D'OPTIMISATION DANS LES SYSTEMES DE CHAUFFAGE A DISTANCE présentée à l'ecole POLYTECHNIQUE FEDERALE DE ZURICH pour l'obtention du titre de Docteur es sciences naturelles par Alain
modèles génériques applicables à la synthèse de contrôleurs discrets pour l Internet des Objets
 modèles génériques applicables à la synthèse de contrôleurs discrets pour l Internet des Objets Mengxuan Zhao, Gilles Privat, Orange Labs, Grenoble, France Eric Rutten, INRIA, Grenoble, France Hassane
modèles génériques applicables à la synthèse de contrôleurs discrets pour l Internet des Objets Mengxuan Zhao, Gilles Privat, Orange Labs, Grenoble, France Eric Rutten, INRIA, Grenoble, France Hassane
SILOG, éditeur & intégrateur d ERP
 SILOG, éditeur & intégrateur d ERP silog.fr éditeur & intégrateur - Spécialiste en solutions ERP SILOG est un Groupe français, privé et indépendant, spécialisé dans l édition et l intégration de solutions
SILOG, éditeur & intégrateur d ERP silog.fr éditeur & intégrateur - Spécialiste en solutions ERP SILOG est un Groupe français, privé et indépendant, spécialisé dans l édition et l intégration de solutions
Introduction à la modélisation
 Formation INRA-ACTA-ICTA Introduction à la modélisation Les modèles mathématiques pour l agronomie et l élevage 2 nde session, du 28 novembre au 1 er décembre 2005 - Informatique et modèles - Nathalie
Formation INRA-ACTA-ICTA Introduction à la modélisation Les modèles mathématiques pour l agronomie et l élevage 2 nde session, du 28 novembre au 1 er décembre 2005 - Informatique et modèles - Nathalie