Localisation de caméra par recalage 2D-3D
|
|
|
- Thierry Chevalier
- il y a 8 ans
- Total affichages :
Transcription
1 Localisation de caméra par recalage 2D-3D Perception pour le Véhicule Intelligent (PVI 2014) Lundi 30 juin 2014 Dandi Pandi Paudel Cédric Demonceaux Le2i UMR CNRS 6306 Pascal Vasseur Litis EA 4108 In So Kweon Yunsu Bok Rcv Lab KAIST Corée du Sud David Hyunchul Shim Unmanned System Research Group KAIST Corée du Sud 1

2 Localisation de caméra par recalage 2D-3D! Contexte : Projet ANR-NRF DrAACaR! Positionnement du problème! Formulation! Cas synchrone! Cas asynchrone! Résultats Expérimentaux! Conclusion et perspectives 2

3 Projet (ANR-NRF) DrAACaR Driver Assistance by Asynchronous Camera Ring ( ) Objectif : Développer des méthodes pour la perception 3D de l environnement direct et complet d un véhicule! Réseau de caméras (et laser) faible coût! Pas de synchronisation entre les capteurs! Pas de calibrage extrinsèque! En temps réel! Système peu coûteux! Flexible! Rapidité d acquisition 3

4 Projet (ANR-NRF) DrAACaR 3 approches proposées 2D/2D 3D/3D 3D/2D Intégration dans un démonstrateur 4

5 Recalage 2D-3D Objectif : localisation précise d une caméra dans un environnement 3D connu! Méthodes directes :! descripteur 3D des points, sensible aux conditions d illumination J. Knopp, J. Sivic, and T. Pajdla. Avoiding confusing features in place recognition. ECCV T. Sattler, B. Leibe, and L. Kobbelt. Fast image-based localization using direct 2d-to-3d matching. ICCV 2011.! méthodes basées modèles S. Christy and R. Horaud. Iterative pose computation from line correspondences. CVIU M. Tamaazousti, V. Gay-Bellile, S. N. Collette, S. Bourgeois, and M. Dhome. Nonlinear refinement of structure from motion reconstruction by taking advantage of a partial knowledge of the environment. CVPR L. Liu and I. Stamos. Automatic 3d to 2d registration for the photorealistic rendering of urban scenes. In Com- puter Vision and Pattern Recognition (CVPR), Conference on, 2005.! Méthodes indirectes : SFM+ICP M. Corsini, M. Dellepiane, F. Ganovelli, R. Gherardi, A. Fusiello, and R. Scopigno. Fully automatic registration of image sets on approximate geometry. IJCV

6 Recalage 2D-3D! Mises en correspondance 2D-3D connues! PnP problème! Mises en correspondance 2D-3D inconnues! SFM+ICP?! Principe : Utiliser conjointement les informations 2D et les informations 3D pour localiser précisément une caméra en mouvement! Hypothèses :! Caméra calibrée,! Correspondance 2D-2D connues 6

7 Recalage 2D-3D o w RX+t X 1- (R I t) position absolue de la caméra R t X 2- (R I t ) déplacement de la caméra entre image 1 et image 2 x 1 Rx 2 +t o 1 o 2 R t x 2 Cas asynchrone : Pouvons nous estimer conjointement 1 et 2 sans correspondance 2D-3D? Cas synchrone : Pouvons nous localiser le capteur en tenant compte simultanément des points 2D et 3D? 7

8 Formulation du problème R t o w x 1 X RX+t X Rx 2 +t o 1 o 2 x 2 Données : X k, P k =1 p Points 3D Matrice de projection (caméra calibrée) x j 1 $ xj 2, j =1 n Points image en correspondance R t Inconnues : (j) 7! k Correspondance 2D-3D (R t) Position caméra 1 par rapport au nuage de points 3D (R 0 t 0 ) Déplacement entre caméra 1 et caméra 2 8
 Position caméra 1 par rapport au nuage de points 3D (R 0")
9 Formulation du problème o w RX+t X Contraintes : x j 1 = P (R, t, X (j)) R t X x j 2 = P (R0 R, R 0 t + t 0,X (j) ) x 1 Rx 2 +t x 2 (x j 1 )T [t 0 ] R 0 x j 2 =0 arg o 1 o 2 min q,t,q 0,t 0, R t Problème à résoudre : nx (k x j 1 P (R, t, X (j) ) k 2 + k x j 2 P (R 0 R, R 0 t + t 0,X (j) ) k 2 ) j=1 tel que (x j 1 )T [t 0 ] R 0 x j 2 =0 k q k=k q 0 k=1 9
 ) k 2 ) j=1 tel que (x j 1 )T [t 0 ] R 0 x j 2 =0 k q k=k q 0 k=1 9")
10 Formulation du problème o w RX+t X Contraintes : x j 1 = P (R, t, X (j)) R t X x j 2 = P (R0 R, R 0 t + t 0,X (j) ) x 1 Rx 2 +t x 2 (x j 1 )T [t 0 ] R 0 x j 2 =0 arg o 1 o 2 min q,t,q 0,t 0, R t tel que (x j 1 )T [t 0 ] R 0 x j 2 =0 k q k=k q 0 k=1 Problème à résoudre : nx [ (x j 1 P (R, t, X (j) )) + (x j 2 P (R 0 R, R 0 t + t 0,X (j) ))] j=1 10
![min q,t,q 0,t 0, R t tel que (x j 1 )T [t 0 ] R 0 x j 2 =0 k q k=k q 0 k=1 Problème à](/docs-images/43/4840384/images/page_10.jpg "résoudre : nx [ (x j 1 P (R, t, X (j) )) + (x j 2 P (R 0 R, R 0 t + t 0,X (j) ))] j=1")
11 Cas synchrone Les données 3D et 2D sont obtenues en même temps ( ex : capteur RGB-D) (R I t) connus nx arg min (x j q 0,t 0 2 P (R 0 R, R 0 t + t 0,X (j) )), j=1 tel que (x j 1 )T [t 0 ] R 0 x j 2 =0 Algorithme (1) 1. Initialisation : 2. Estimation de R t par résolution d un PnP problème(*) arg min q 0,t 0 (j) = arg min k21 p k xj 1 P (R, t, X k ) k j =1 n nx (x j 2 P (R 0 R, R 0 t + t 0,X (j) )) j=1 3. Estimation de la pose par minimisation de (1) (*) D. Nister, A minimal solution to the generalised 3-point pose problem, CVPR
 )) j=1 3. Estimation de la pose par minimisation de (1) (*) D.")
12 Cas asynchrone (R I t) inconnus nx arg min [ (x j q,t,q 0,t 0 1 P (R, t, X (j) )) + (x j 2 P (R 0 R, R 0 t + t 0,X (j) ))], j=1 tel que (x j 1 )T [t 0 ] R 0 x j 2 =0 Algorithme : (1) 1. Initialisation : R,t,R,t estimés par géolocalisation et SFM 2. Alignement itératif des caméras jusqu à convergence : (j) = arg min k k21 p xj 1 P (R, t, X k ) k j =1 n nx arg min [ (x j 1 P (R, t, X (j) )) + (x j 2 P (R 0 R, R 0 t + t 0,X (j) ))] R,t j=1 3. Estimation de la pose par minimisation de (1) 12
 = arg min k k21 p xj 1 P (R, t, X k ) k j =1 n nx arg min [ (x j")
13 Résultats expérimentaux! Données de synthèse! Données réelles :! Cas Synchrone! Séquences Kaist! Séquences Kitti! Cas Asynchrone! Kinect! Benchmark 13

14 Résultats expérimentaux! 400 points 3D générés aléatoirement projetés sur des images 256*256 bruitées.! Initialisation de R avec erreur de 2 à 4 degrés par angle et T de +- 5%! 100 tests sont effectués par niveaux de bruit 14

15 Résultats expérimentaux! Séquences KAIST! KAIST Dataset (a) (b) Fig. (a) Reconstruction de la carte (3.5 km) (b) Fermetures de boucles durant le déplacement 15
 Reconstruction de la carte (3.")
16 Résultats expérimentaux! KAIST Dataset (a) (b) Fig. (a) Reconstruciton autout de la fermeture 1 (b) Image en ce lieu 16
 Image en")
17 Résultats expérimentaux Bok After refinement Y. Bok (*) Notre méthode Fig. Rouge : première visite, blanc : seconde visite (*) Y. Bok, Y. Jeong, D-G Choi, I. S. Kweon, Capturing Village-level Heritages with a Hand-held Camera-Laser Fusion Sensor. IJCV

18 Résultats expérimentaux Boucle Taille(m) Bok et al. (m) Notre méthode (m)

19 Résultats expérimentaux : KITTI! KITTI Dataset
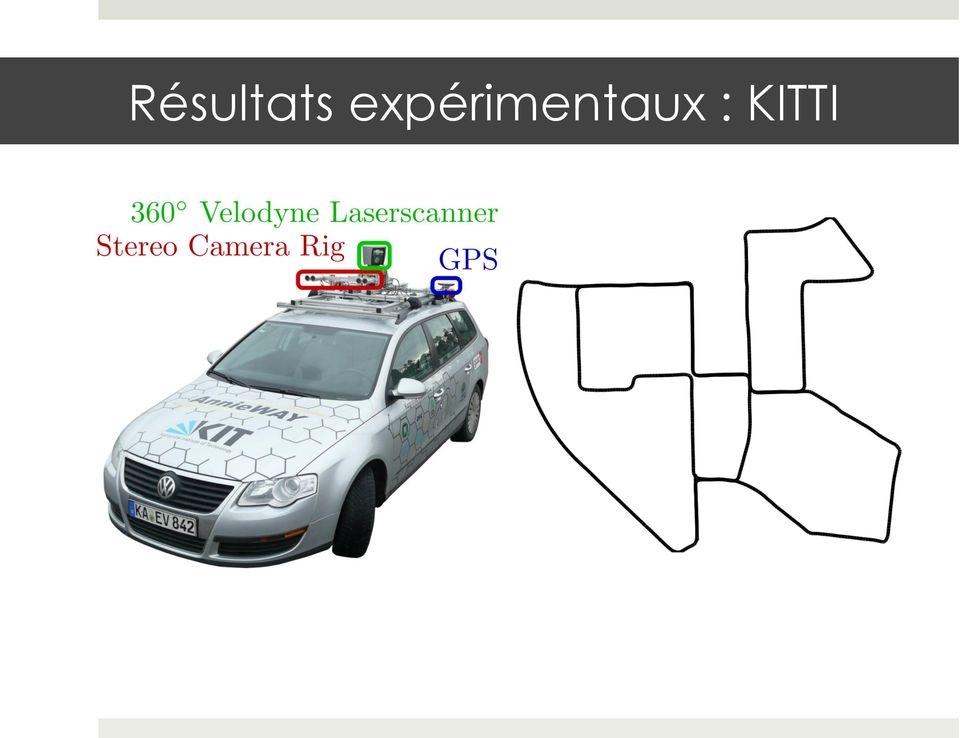
20 Résultats expérimentaux : KITTI! KITTI Dataset (a) (b) (c) Fig. Images stéréo(a-b), données 3D associées(c).
,")
21 Résultats expérimentaux : KITTI Sq. N Nbre d images Estimation initiale Notre Méthode T(%) R(deg/m) T(%) R(deg/m) Tab. Translation ( T ) and Rotation ( R) errors in Initial and Refined results for five different sequences
22 Résultats expérimentaux : KITTI Fig. Map built by our method (Initial Estimate and Refined Motion) vs. Ground Truth for the fifth sequence.
23 Résultats expérimentaux : cas asynchrone (a) Scène 3D, (b) paire d images
24 Résultats expérimentaux : cas asynchrone Table : Erreur des reconstructions sur le ballon. (Angle HH : , Circonférence : 68-70cm)
25 Résultats expérimentaux : cas asynchrone Fig. 3D scene from laser scanner (left) and 2D images (right)
26 Résultats expérimentaux : cas asynchrone Fig. Texture mapping
27 Résultats expérimentaux : cas asynchrone Fig. Bundle adjustment (left) vs. Out method (right)
28 Résultats expérimentaux : cas asynchrone 28
29 Résultats expérimentaux : cas asynchrone R t Erreur 3D Ajustement de faisceaux Notre méthode Notre méthode + ajustement de faisceaux
30 Conclusion et perspective! Méthode tenant compte de l information 3D disponible de l environnement! Aucune mise en correspondance entre les informations 2D et 3D! Pas de critère photométrique! Multi-modal! Plus performant qu un ajustement de faisceaux sans connaissance a priori! Sensible à l initialisation! Dépend de la qualité du nuage de points 3D! Approche globale, optimale 30
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12
 Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
Reconnaissance de visages 2.5D par fusion des indices de texture et de profondeur ICI 12/12/12 2 Discrimination Invariance Expressions faciales Age Pose Eclairage 11/12/2012 3 Personne Inconnue Identité
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale
 R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
R-ICP : une nouvelle approche d appariement 3D orientée régions pour la reconnaissance faciale Boulbaba BEN AMOR, Karima OUJI, Mohsen ARDABILIAN, et Liming CHEN Laboratoire d InfoRmatique en Images et
Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré
 Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré Pierre Rolin Marie-Odile Berger Frédéric Sur LORIA, UMR CNRS 7503, Université de Lorraine INRIA Nancy Grand
Simulation de point de vue pour la localisation d une caméra à partir d un modèle non structuré Pierre Rolin Marie-Odile Berger Frédéric Sur LORIA, UMR CNRS 7503, Université de Lorraine INRIA Nancy Grand
Détection des points d intérêt et Segmentation des images RGB-D. Présentée par : Bilal Tawbe. Semaine de la recherche de l UQO
 Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Détection des points d intérêt et Segmentation des images RGB-D Présentée par : Bilal Tawbe Semaine de la recherche de l UQO 25 Mars 2015 1. Introduction Les méthodes de détection de points d intérêt ont
Analyse d images. Edmond.Boyer@imag.fr. Edmond Boyer UFRIMA 1
 Analyse d images Edmond.Boyer@imag.fr Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Analyse d images Edmond.Boyer@imag.fr Edmond Boyer UFRIMA 1 1 Généralités Analyse d images (Image Analysis) : utiliser un ordinateur pour interpréter le monde extérieur au travers d images. Images Objets
Réalité virtuelle au service de la maintenance
 Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
Réalité virtuelle au service de la maintenance Christian Boucheny EDF R&D SINETICS Séminaire Cartographie d intérieur et d extérieur ENSMP 04/09/2013 Sommaire 1. Application 1 : ADRM Aide à la Décision
SLAM Visuel 3D pour robot mobile autonome
 Master de Sciences Mention «Imagerie, Robotique et Ingénierie pour le Vivant» - Projet de Fin D étude - SLAM Visuel 3D pour robot mobile autonome Romain Drouilly Encadrants ECA Benoit Morisset Pierrick
Master de Sciences Mention «Imagerie, Robotique et Ingénierie pour le Vivant» - Projet de Fin D étude - SLAM Visuel 3D pour robot mobile autonome Romain Drouilly Encadrants ECA Benoit Morisset Pierrick
Toolbox d étalonnage pour Kinect : Application à la fusion d une Kinect et d un télémètre laser
 Toolbox d étalonnage pour Kinect : Application à la fusion d une Kinect et d un télémètre laser Jean-Clément Devaux, Hicham Hadj-Abdelkader, Etienne Colle To cite this version: Jean-Clément Devaux, Hicham
Toolbox d étalonnage pour Kinect : Application à la fusion d une Kinect et d un télémètre laser Jean-Clément Devaux, Hicham Hadj-Abdelkader, Etienne Colle To cite this version: Jean-Clément Devaux, Hicham
Présenta)on des ac)vités de recherche de l équipe PR du laboratorie MIS
on des ac)vités de recherche de l équipe PR du laboratorie MIS") Localisa1on et Naviga1on de Robots M2 EEAII, parcours ViRob, A.U. 2014-2015 Présenta)on des ac)vités de recherche de l équipe PR du laboratorie MIS Fabio MORBIDI E-mail: fabio.morbidi@u-picardie.fr Laboratorie
Localisa1on et Naviga1on de Robots M2 EEAII, parcours ViRob, A.U. 2014-2015 Présenta)on des ac)vités de recherche de l équipe PR du laboratorie MIS Fabio MORBIDI E-mail: fabio.morbidi@u-picardie.fr Laboratorie
Calage robuste et accéléré de nuages de points en environnements naturels via l apprentissage automatique
 Calage robuste et accéléré de nuages de points en environnements naturels via l apprentissage automatique Mémoire Maxime Latulippe Maîtrise en informatique Maître ès sciences (M.Sc.) Québec, Canada Maxime
Calage robuste et accéléré de nuages de points en environnements naturels via l apprentissage automatique Mémoire Maxime Latulippe Maîtrise en informatique Maître ès sciences (M.Sc.) Québec, Canada Maxime
Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation
 Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
Laboratoire Vision & Robotique Comparaison de Relevés 3D issus de plusieurs Systèmes de Numérisation Emilie KOENIG, Benjamin ALBOUY, Sylvie TREUILLET, Yves Lucas Contact : Sylvie Treuillet Polytech'Orléans
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Analyse de la vidéo. Chapitre 4.1 - La modélisation pour le suivi d objet. 10 mars 2015. Chapitre 4.1 - La modélisation d objet 1 / 57
 Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Analyse de la vidéo Chapitre 4.1 - La modélisation pour le suivi d objet 10 mars 2015 Chapitre 4.1 - La modélisation d objet 1 / 57 La représentation d objets Plan de la présentation 1 La représentation
Francis BISSON (06 794 819) Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) IFT702 Planification en intelligence artificielle
 Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) IFT702 Planification en intelligence artificielle") Francis BISSON (06 794 819) Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) PLANIFICATION DE TÂCHES DANS MS PROJECT IFT702 Planification en intelligence artificielle Présenté à M. Froduald KABANZA
Francis BISSON (06 794 819) Kenny CÔTÉ (06 836 427) Pierre-Luc ROGER (06 801 883) PLANIFICATION DE TÂCHES DANS MS PROJECT IFT702 Planification en intelligence artificielle Présenté à M. Froduald KABANZA
Société de Geo-engineering
 Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Définition et diffusion de signatures sémantiques dans les systèmes pair-à-pair
 Définition et diffusion de signatures sémantiques dans les systèmes pair-à-pair Raja Chiky, Bruno Defude, Georges Hébrail GET-ENST Paris Laboratoire LTCI - UMR 5141 CNRS Département Informatique et Réseaux
Définition et diffusion de signatures sémantiques dans les systèmes pair-à-pair Raja Chiky, Bruno Defude, Georges Hébrail GET-ENST Paris Laboratoire LTCI - UMR 5141 CNRS Département Informatique et Réseaux
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR
 Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Reconstruction de bâtiments en 3D à partir de nuages de points LIDAR Mickaël Bergem 25 juin 2014 Maillages et applications 1 Table des matières Introduction 3 1 La modélisation numérique de milieux urbains
Université des Sciences et Technologies de Lille 1 UFR Informatique. Projet scientifique de Master 2 Image, Vision, Interaction.
 Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
Université des Sciences et Technologies de Lille 1 UFR Informatique Projet scientifique de Master 2 Image, Vision, Interaction Année 2012/1013 Reconstruction de scène réaliste via Kinect c Amélioration
La classification automatique de données quantitatives
 La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
La classification automatique de données quantitatives 1 Introduction Parmi les méthodes de statistique exploratoire multidimensionnelle, dont l objectif est d extraire d une masse de données des informations
Glossaire technique Veditec
 Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
Glossaire technique Veditec 3D/2D DNR (digital noise réduction) La technologie DNR est un système de réduction numérique de bruit ayant pour but de réduire le bruit sur l image. Elle permet d obtenir des
ISC21-1 --- Système d Information Architecture et Administration d un SGBD Compléments SQL
 ISC21-1 --- Système d Information Architecture et Administration d un SGBD Compléments SQL Jean-Marie Pécatte jean-marie.pecatte@iut-tlse3.fr 16 novembre 2006 ISIS - Jean-Marie PECATTE 1 Valeur de clé
ISC21-1 --- Système d Information Architecture et Administration d un SGBD Compléments SQL Jean-Marie Pécatte jean-marie.pecatte@iut-tlse3.fr 16 novembre 2006 ISIS - Jean-Marie PECATTE 1 Valeur de clé
VISUALISATION DE NUAGES DE POINTS
 ARNAUD BLETTERER MULTI-RÉSOLUTION 1/16 VISUALISATION DE NUAGES DE POINTS MULTI-RÉSOLUTION AU TRAVERS DE CARTES DE PROFONDEUR Arnaud Bletterer Université de Nice Sophia Antipolis Laboratoire I3S - Cintoo
ARNAUD BLETTERER MULTI-RÉSOLUTION 1/16 VISUALISATION DE NUAGES DE POINTS MULTI-RÉSOLUTION AU TRAVERS DE CARTES DE PROFONDEUR Arnaud Bletterer Université de Nice Sophia Antipolis Laboratoire I3S - Cintoo
Solution dédiée aux canalisations de distribution
 Détection de fuites de gaz avec SELMA Méthane Méthane Solution dédiée aux canalisations de distribution À propos de Pergam-Suisse AG Spécialiste de la détection des fuites de gaz naturel et des solutions
Détection de fuites de gaz avec SELMA Méthane Méthane Solution dédiée aux canalisations de distribution À propos de Pergam-Suisse AG Spécialiste de la détection des fuites de gaz naturel et des solutions
Vérification audiovisuelle de l identité
 Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Vérification audiovisuelle de l identité Rémi Landais, Hervé Bredin, Leila Zouari, et Gérard Chollet École Nationale Supérieure des Télécommunications, Département Traitement du Signal et des Images, Laboratoire
Principe de symétrisation pour la construction d un test adaptatif
 Principe de symétrisation pour la construction d un test adaptatif Cécile Durot 1 & Yves Rozenholc 2 1 UFR SEGMI, Université Paris Ouest Nanterre La Défense, France, cecile.durot@gmail.com 2 Université
Principe de symétrisation pour la construction d un test adaptatif Cécile Durot 1 & Yves Rozenholc 2 1 UFR SEGMI, Université Paris Ouest Nanterre La Défense, France, cecile.durot@gmail.com 2 Université
Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye
 Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye Résumé Jean-Emmanuel Deschaud, Xavier Brun, François Goulette Mines ParisTech, CAOR-Centre
Colorisation et texturation temps réel d environnements urbains par système mobile avec scanner laser et caméra fish-eye Résumé Jean-Emmanuel Deschaud, Xavier Brun, François Goulette Mines ParisTech, CAOR-Centre
UNIVERSITÉ DE MONTRÉAL APPRENTISSAGE DE MODÈLES PROBABILISTES POUR LA VISION STÉRÉOSCOPIQUE EN TEMPS RÉEL
 UNIVERSITÉ DE MONTRÉAL APPRENTISSAGE DE MODÈLES PROBABILISTES POUR LA VISION STÉRÉOSCOPIQUE EN TEMPS RÉEL LUCAS BERTHOU DÉPARTEMENT DE GÉNIE INFORMATIQUE ET GÉNIE LOGICIEL ÉCOLE POLYTECHNIQUE DE MONTRÉAL
UNIVERSITÉ DE MONTRÉAL APPRENTISSAGE DE MODÈLES PROBABILISTES POUR LA VISION STÉRÉOSCOPIQUE EN TEMPS RÉEL LUCAS BERTHOU DÉPARTEMENT DE GÉNIE INFORMATIQUE ET GÉNIE LOGICIEL ÉCOLE POLYTECHNIQUE DE MONTRÉAL
Détection de têtes dans un nuage de points 3D à l aide d un modèle de mélange sphérique
 Détection de têtes dans un nuage de points 3D à l aide d un modèle de mélange sphérique Denis Brazey & Bruno Portier 2 Société Prynɛl, RD974 290 Corpeau, France denis.brazey@insa-rouen.fr 2 Normandie Université,
Détection de têtes dans un nuage de points 3D à l aide d un modèle de mélange sphérique Denis Brazey & Bruno Portier 2 Société Prynɛl, RD974 290 Corpeau, France denis.brazey@insa-rouen.fr 2 Normandie Université,
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU
 $SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES fabien.figueres@mpsa.com 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
$SSOLFDWLRQGXNULJHDJHSRXUOD FDOLEUDWLRQPRWHXU Fabien FIGUERES fabien.figueres@mpsa.com 0RWVFOpV : Krigeage, plans d expériences space-filling, points de validations, calibration moteur. 5pVXPp Dans le
BILAN du projet PEPS 1 EOLIN (Eolien LMI INSA)
") BILAN du projet PEPS 1 EOLIN (Eolien LMI INSA) Lab. de Math de l INSA de ROUEN FR CNRS 3335 et EA 3226 PLAN 1. Introduction 2. Bilan scientifique 3. Bilan financier 4. Conclusion 1 Introduction Le projet
BILAN du projet PEPS 1 EOLIN (Eolien LMI INSA) Lab. de Math de l INSA de ROUEN FR CNRS 3335 et EA 3226 PLAN 1. Introduction 2. Bilan scientifique 3. Bilan financier 4. Conclusion 1 Introduction Le projet
Monitoring elderly People by Means of Cameras
 Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Nuadu project Technologies for Personal Hearth Seminar, June 4th, 2009 Monitoring elderly People by Means of Cameras Laurent LUCAT Laboratory of Embedded Vision Systems CEA LIST, Saclay, France 1 Summary
Une méthode de classification supervisée sans paramètre pour l apprentissage sur les grandes bases de données
 Une méthode de classification supervisée sans paramètre pour l apprentissage sur les grandes bases de données Marc Boullé Orange Labs 2 avenue Pierre Marzin 22300 Lannion marc.boulle@orange-ftgroup.com,
Une méthode de classification supervisée sans paramètre pour l apprentissage sur les grandes bases de données Marc Boullé Orange Labs 2 avenue Pierre Marzin 22300 Lannion marc.boulle@orange-ftgroup.com,
Relever les défis des véhicules autonomes
 EMM 2014 12eme rencontre européenne de mécatronique Relever les défis des véhicules autonomes Mathias Perrollaz Ingénieur expert Inria Christian Laugier Directeur de recherche Inria E-Motion Team Annecy,
EMM 2014 12eme rencontre européenne de mécatronique Relever les défis des véhicules autonomes Mathias Perrollaz Ingénieur expert Inria Christian Laugier Directeur de recherche Inria E-Motion Team Annecy,
SPEEDSCAN /3SHAPE SCANNER ET LOGICIEL DE DAO POUR LA TECHNIQUE DENTAIRE
 SPEEDSCAN /3SHAPE SCANNER ET LOGICIEL DE DAO POUR LA TECHNIQUE DENTAIRE Le Speedscan /3Shape réunit en un système le savoir-faire de 3Shape en matière de scannage tridimensionnel et le logiciel de DAO
SPEEDSCAN /3SHAPE SCANNER ET LOGICIEL DE DAO POUR LA TECHNIQUE DENTAIRE Le Speedscan /3Shape réunit en un système le savoir-faire de 3Shape en matière de scannage tridimensionnel et le logiciel de DAO
RIE LE RENDU THEO. 2 e trim ÉTAPE DE FINITION BOÎTE DE DIALOGUE. remarques
 THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
THEO RIE LE RENDU 2 e trim JANVIER 2008 remarques ÉTAPE DE FINITION Le rendu est la partie finale de notre création, à ce moment on décide que notre 3D est finie et l on en réalise une image 2D Cette image
Équations non linéaires
 Équations non linéaires Objectif : trouver les zéros de fonctions (ou systèmes) non linéaires, c-à-d les valeurs α R telles que f(α) = 0. y f(x) α 1 α 2 α 3 x Equations non lineaires p. 1/49 Exemples et
Équations non linéaires Objectif : trouver les zéros de fonctions (ou systèmes) non linéaires, c-à-d les valeurs α R telles que f(α) = 0. y f(x) α 1 α 2 α 3 x Equations non lineaires p. 1/49 Exemples et
Folio Case User s Guide
 Fujitsu America, Inc. Folio Case User s Guide I N S T R U C T I O N S This Folio Case is a stylish, lightweight case for protecting your Tablet PC. Elastic Strap Pen Holder Card Holders/ Easel Stops Figure
Fujitsu America, Inc. Folio Case User s Guide I N S T R U C T I O N S This Folio Case is a stylish, lightweight case for protecting your Tablet PC. Elastic Strap Pen Holder Card Holders/ Easel Stops Figure
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS
 GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
MCMC et approximations en champ moyen pour les modèles de Markov
 MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
MCMC et approximations en champ moyen pour les modèles de Markov Gersende FORT LTCI CNRS - TELECOM ParisTech En collaboration avec Florence FORBES (Projet MISTIS, INRIA Rhône-Alpes). Basé sur l article:
Communications immersives : Enjeux et perspectives
 Journée Futur et Ruptures Communications immersives : Enjeux et perspectives Béatrice Pesquet-Popescu Télécom ParisTech, Département TSI 5 mars 2015 Institut Mines-Télécom Tendances actuelles Plus, plus,
Journée Futur et Ruptures Communications immersives : Enjeux et perspectives Béatrice Pesquet-Popescu Télécom ParisTech, Département TSI 5 mars 2015 Institut Mines-Télécom Tendances actuelles Plus, plus,
La solution à vos mesures de pression
 Mesure de force linéique La solution à vos mesures de pression Sensibilité Répétabilité Stabilité Le système X3 de XSENSOR propose un concept innovant spécialement adapté pour vos applications de mesure
Mesure de force linéique La solution à vos mesures de pression Sensibilité Répétabilité Stabilité Le système X3 de XSENSOR propose un concept innovant spécialement adapté pour vos applications de mesure
Depuis quelques années, les
 PHOTOGRAMMÉTRIE la photogrammétrie se trouve soudainement revalorisée, dans une période où la lasergrammétrie semblait s imposer dans la plupart des opérations de relevé architectural. Cet article s attachera
PHOTOGRAMMÉTRIE la photogrammétrie se trouve soudainement revalorisée, dans une période où la lasergrammétrie semblait s imposer dans la plupart des opérations de relevé architectural. Cet article s attachera
17/07/2013. Décisionnel dans le Nuage. Laboratoire ERIC. Section 1. Équipe d Accueil 3083. Décisionnel dans le Nuage.
 Master 2 FDGC-ECD Année 203-204 Laboratoire ERIC Équipe d Accueil 3083 et Jérôme Darmont eric.univ-lyon2.fr/~jdarmont/ Section Décisionnel dans le Nuage 2 Le meilleur des mondes Du décisionnel à papa datawarehousing0.wikispaces.com
Master 2 FDGC-ECD Année 203-204 Laboratoire ERIC Équipe d Accueil 3083 et Jérôme Darmont eric.univ-lyon2.fr/~jdarmont/ Section Décisionnel dans le Nuage 2 Le meilleur des mondes Du décisionnel à papa datawarehousing0.wikispaces.com
de calibration Master 2: Calibration de modèles: présentation et simulation d
 Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Master 2: Calibration de modèles: présentation et simulation de quelques problèmes de calibration Plan de la présentation 1. Présentation de quelques modèles à calibrer 1a. Reconstruction d une courbe
Programme scientifique Majeure INTELLIGENCE NUMERIQUE. Mentions Image et Réalité Virtuelle Intelligence Artificielle et Robotique
 É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
É C O L E D I N G É N I E U R D E S T E C H N O L O G I E S D E L I N F O R M A T I O N E T D E L A C O M M U N I C A T I O N Programme scientifique Majeure INTELLIGENCE NUMERIQUE Langage Java Mentions
TRAITEMENT DES DONNEES MANQUANTES AU MOYEN DE L ALGORITHME DE KOHONEN
 TRAITEMENT DES DONNEES MANQUANTES AU MOYEN DE L ALGORITHME DE KOHONEN Marie Cottrell, Smaïl Ibbou, Patrick Letrémy SAMOS-MATISSE UMR 8595 90, rue de Tolbiac 75634 Paris Cedex 13 Résumé : Nous montrons
TRAITEMENT DES DONNEES MANQUANTES AU MOYEN DE L ALGORITHME DE KOHONEN Marie Cottrell, Smaïl Ibbou, Patrick Letrémy SAMOS-MATISSE UMR 8595 90, rue de Tolbiac 75634 Paris Cedex 13 Résumé : Nous montrons
RECONSTRUCTION D'UN MODÈLE 3D D'OBJET AVEC LA KINECT
 PROJET DE SEMESTRE : RECONSTRUCTION D'UN MODÈLE 3D D'OBJET AVEC LA KINECT SOFTWARE PROJECT MANAGEMENT PLAN Projet Reconstruction d'un modèle 3D d'objet avec la Kinect Document École Software Project Management
PROJET DE SEMESTRE : RECONSTRUCTION D'UN MODÈLE 3D D'OBJET AVEC LA KINECT SOFTWARE PROJECT MANAGEMENT PLAN Projet Reconstruction d'un modèle 3D d'objet avec la Kinect Document École Software Project Management
Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS
 Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Année 2004 THESE Préparé au Laboratoire d Analyse et d Architecture des Systèmes du CNRS En vue de l obtention du titre de Docteur de l Institut National Polytechnique de Toulouse Spécialité : Informatique
Contrôle stochastique d allocation de ressources dans le «cloud computing»
 Contrôle stochastique d allocation de ressources dans le «cloud computing» Jacques Malenfant 1 Olga Melekhova 1, Xavier Dutreilh 1,3, Sergey Kirghizov 1, Isis Truck 2, Nicolas Rivierre 3 Travaux partiellement
Contrôle stochastique d allocation de ressources dans le «cloud computing» Jacques Malenfant 1 Olga Melekhova 1, Xavier Dutreilh 1,3, Sergey Kirghizov 1, Isis Truck 2, Nicolas Rivierre 3 Travaux partiellement
E-Biothon : Une plate-forme pour accélérer les recherches en biologie, santé et environnement.
 E-Biothon : Une plate-forme pour accélérer les recherches en biologie, santé et environnement. N.Bard, S.Boin, F.Bothorel, P.Collinet, M.Daydé, B. Depardon, F. Desprez, M.Flé, A.Franc, J.-F. Gibrat, D.
E-Biothon : Une plate-forme pour accélérer les recherches en biologie, santé et environnement. N.Bard, S.Boin, F.Bothorel, P.Collinet, M.Daydé, B. Depardon, F. Desprez, M.Flé, A.Franc, J.-F. Gibrat, D.
Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image
 IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
IN52-IN54 A2008 Algorithme des fourmis appliqué à la détection et au suivi de contours dans une image Etudiants : Nicolas MONNERET Alexandre HAFFNER Sébastien DE MELO Responsable : Franck GECHTER Sommaire
Equation LIDAR : exp 2 Equation RADAR :
 Contexte scientifique Systèmes LIDAR/RADAR Equation LIDAR : exp Equation RADAR : p (r) : puissance rétrodiffusée r : altitude ou profondeur. C : constante instrumentale. β : coefficient de rétrodiffusion
Contexte scientifique Systèmes LIDAR/RADAR Equation LIDAR : exp Equation RADAR : p (r) : puissance rétrodiffusée r : altitude ou profondeur. C : constante instrumentale. β : coefficient de rétrodiffusion
un nouvel œil pour l analyse de mouvement
 un nouvel œil pour l analyse de mouvement L entreprise EyeNetics La S.A.R.L. EyeNetics a pour objectif de simplifier l utilisation des systèmes d analyse de mouvement. Dans cette optique nous avons conçu
un nouvel œil pour l analyse de mouvement L entreprise EyeNetics La S.A.R.L. EyeNetics a pour objectif de simplifier l utilisation des systèmes d analyse de mouvement. Dans cette optique nous avons conçu
Viser une démarche de recherche organisée
 Etat de l art sur les travaux portant sur les audits en Management des connaissances Ecole Centrale Paris Le 2 décembre 2009 Audit KM - Rapport intermédaire d'avancement 1 Viser une démarche de recherche
Etat de l art sur les travaux portant sur les audits en Management des connaissances Ecole Centrale Paris Le 2 décembre 2009 Audit KM - Rapport intermédaire d'avancement 1 Viser une démarche de recherche
Intelligence artificielle et les défis en robotique mobile et autonome
 Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
Intelligence artificielle et les défis en robotique mobile et autonome Éric Beaudry http://planiart.usherbrooke.ca/~eric/ Étudiant au doctorat en informatique Laboratoires Planiart et Laborius 13 février
RAPID 3.34 - Prenez le contrôle sur vos données
 RAPID 3.34 - Prenez le contrôle sur vos données Parmi les fonctions les plus demandées par nos utilisateurs, la navigation au clavier et la possibilité de disposer de champs supplémentaires arrivent aux
RAPID 3.34 - Prenez le contrôle sur vos données Parmi les fonctions les plus demandées par nos utilisateurs, la navigation au clavier et la possibilité de disposer de champs supplémentaires arrivent aux
PROGRAMME DE FORMATIONS
 PROGRAMME DE FORMATIONS Formations par internet aux logiciels ArchiTECH.PC et KutchCAD SESSIONS E-LEARNING DE 1 À 4 HEURES L ARCHITECTURE INTÉGRALE Organisme de formation n 73.46.00171.46 FORMATIONS PAR
PROGRAMME DE FORMATIONS Formations par internet aux logiciels ArchiTECH.PC et KutchCAD SESSIONS E-LEARNING DE 1 À 4 HEURES L ARCHITECTURE INTÉGRALE Organisme de formation n 73.46.00171.46 FORMATIONS PAR
Modeling reality with the latest in 3D technology: Virtualisation. Aperçu
 Rencontres art, science, technique & architecture (RASTA_02) De l acquisition à la restitution de données numériques 3D 31 octobre 2002 C2RMF-DMF 6 rue des Pyramides75 041 Paris Modeling reality with the
Rencontres art, science, technique & architecture (RASTA_02) De l acquisition à la restitution de données numériques 3D 31 octobre 2002 C2RMF-DMF 6 rue des Pyramides75 041 Paris Modeling reality with the
Introduction à l informatique temps réel Pierre-Yves Duval (cppm)
") Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
Introduction à l informatique temps réel Pierre-Yves Duval (cppm) Ecole d informatique temps réel - La Londes les Maures 7-11 Octobre 2002 -Définition et problématique - Illustration par des exemples -Automatisme:
INTEGRATED TEST SUITE
 INTEGRATED TEST SUITE PRÉSENTATION UNE TECHNOLOGIE HAUTES PERFORMANCES POUR DES APPLICATIONS D ESSAI PLUS FLEXIBLES ET PLUS CONVIVIALES WHAT MOVES YOUR WORLD CONÇU POUR RÉPONDRE À VOS BESOINS D AUJOURD
INTEGRATED TEST SUITE PRÉSENTATION UNE TECHNOLOGIE HAUTES PERFORMANCES POUR DES APPLICATIONS D ESSAI PLUS FLEXIBLES ET PLUS CONVIVIALES WHAT MOVES YOUR WORLD CONÇU POUR RÉPONDRE À VOS BESOINS D AUJOURD
Modélisation et simulation du trafic. Christine BUISSON (LICIT) Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005
 Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005") Modélisation et simulation du trafic Christine BUISSON (LICIT) Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005 Plan de la présentation! Introduction : modèles et simulations définition
Modélisation et simulation du trafic Christine BUISSON (LICIT) Journée Simulation dynamique du trafic routier ENPC, 9 Mars 2005 Plan de la présentation! Introduction : modèles et simulations définition
Projet : Recalage par maximisation de l information mutuelle
 École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
École Polytechnique de Montréal Automne 25, 12 décembre 25 Projet : Recalage par maximisation de l information mutuelle GBM613, Application médicales de l informatique Nom Matricule Groupe Herve Lombaert
Sommaire. Introduction.2. 1. Définition..2. 2. Historique.2. 3. Domaine d application.2. 4.Les Travaux réalisés sur les domaines d application.
 Sommaire Introduction.2 1. Définition..2 2. Historique.2 3. Domaine d application.2 4.Les Travaux réalisés sur les domaines d application.3 5.Algorithme 4 6.Exemple d application 5 7. Avantage et inconvénient..6
Sommaire Introduction.2 1. Définition..2 2. Historique.2 3. Domaine d application.2 4.Les Travaux réalisés sur les domaines d application.3 5.Algorithme 4 6.Exemple d application 5 7. Avantage et inconvénient..6
L apprentissage automatique
 L apprentissage automatique L apprentissage automatique L'apprentissage automatique fait référence au développement, à l analyse et à l implémentation de méthodes qui permettent à une machine d évoluer
L apprentissage automatique L apprentissage automatique L'apprentissage automatique fait référence au développement, à l analyse et à l implémentation de méthodes qui permettent à une machine d évoluer
Nouveau Barème W.B.F. de points de victoire 4 à 48 donnes
 Nouveau Barème W.B.F. de points de victoire 4 à 48 donnes Pages 4 à 48 barèmes 4 à 48 donnes Condensé en une page: Page 2 barèmes 4 à 32 ( nombre pair de donnes ) Page 3 Tous les autres barèmes ( PV de
Nouveau Barème W.B.F. de points de victoire 4 à 48 donnes Pages 4 à 48 barèmes 4 à 48 donnes Condensé en une page: Page 2 barèmes 4 à 32 ( nombre pair de donnes ) Page 3 Tous les autres barèmes ( PV de
Eléments pour l animation l réunion du 16 Septembre 2010. http://www.plmlab.fr. v0.4 du 13 Septembre 2010
 Eléments pour l animation l de la réunion du 16 Septembre 2010 http://www.plmlab.fr v0.4 du 13 Septembre 2010 1 Ordre du jour de la réunion 14h00 15h15 Présentation de la démarche et du projet d association
Eléments pour l animation l de la réunion du 16 Septembre 2010 http://www.plmlab.fr v0.4 du 13 Septembre 2010 1 Ordre du jour de la réunion 14h00 15h15 Présentation de la démarche et du projet d association
Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules
 Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules M. Shawky, K. Chaaban, P. Crubillé Heudiasyc UMR 6599 CNRS, Univ. Tech. De Compiègne 1 ADAS (Advanced Driving Aid System) Reactive
Ré-ordonnancement adaptatif de messages dans un réseau ad hoc de véhicules M. Shawky, K. Chaaban, P. Crubillé Heudiasyc UMR 6599 CNRS, Univ. Tech. De Compiègne 1 ADAS (Advanced Driving Aid System) Reactive
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci http://liris.cnrs.fr/hamamache.kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de
Once the installation is complete, you can delete the temporary Zip files..
 Sommaire Installation... 2 After the download... 2 From a CD... 2 Access codes... 2 DirectX Compatibility... 2 Using the program... 2 Structure... 4 Lier une structure à une autre... 4 Personnaliser une
Sommaire Installation... 2 After the download... 2 From a CD... 2 Access codes... 2 DirectX Compatibility... 2 Using the program... 2 Structure... 4 Lier une structure à une autre... 4 Personnaliser une
Algorithmique des Systèmes Répartis Protocoles de Communications
 Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Algorithmique des Systèmes Répartis Protocoles de Communications Master Informatique Dominique Méry Université de Lorraine 1 er avril 2014 1 / 70 Plan Communications entre processus Observation et modélisation
Amélioration de la fiabilité d inspection en CND grâce à la fusion d information : applications en rayons X et ultrasons
 Amélioration de la fiabilité d inspection en CND grâce à la fusion d information : applications en rayons X et ultrasons Ahmad OSMAN 1a, Valérie KAFTANDJIAN b, Ulf HASSLER a a Fraunhofer Development Center
Amélioration de la fiabilité d inspection en CND grâce à la fusion d information : applications en rayons X et ultrasons Ahmad OSMAN 1a, Valérie KAFTANDJIAN b, Ulf HASSLER a a Fraunhofer Development Center
La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS
 Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Création intuitive des éléments d un paysage
 Création intuitive des éléments d un paysage Marie-Paule Cani Univ. Grenoble-Alpes, CNRS & Inria Organisation du cours «Façonner l imaginaire» Partie 1 : Création numérique 3D Modélisation géométrique
Création intuitive des éléments d un paysage Marie-Paule Cani Univ. Grenoble-Alpes, CNRS & Inria Organisation du cours «Façonner l imaginaire» Partie 1 : Création numérique 3D Modélisation géométrique
Sommaire. Couverture de zone de surveillance dans les réseaux de capteurs. De quoi parle-t-on ici (1/2)? Objectif. De quoi parle-t-on ici (2/2)?
? Objectif. De quoi parle-t-on ici (2/2)?") ouverture de zone de surveillance dans les réseaux de capteurs Jean arle, Master Recherche Informatique Option Informatique Mobile 008-009 s Jean arle - Master Recherche Informatique 008-009 Objectif e
ouverture de zone de surveillance dans les réseaux de capteurs Jean arle, Master Recherche Informatique Option Informatique Mobile 008-009 s Jean arle - Master Recherche Informatique 008-009 Objectif e
PHANTOM. Manuel Avancé. V 1.4 2013.03.22 Révision. 2013 DJI Innovations. All Rights Reserved. 1
 PHANTOM Manuel Avancé V 1.4 2013.03.22 Révision 2013 DJI Innovations. All Rights Reserved. 1 Index INDEX... 2 A1 INSTALLATION DU PILOTE ET DU LOGICIEL... 3 A2 CONFIGURATION ET MISES A JOUR DU LOGICIEL
PHANTOM Manuel Avancé V 1.4 2013.03.22 Révision 2013 DJI Innovations. All Rights Reserved. 1 Index INDEX... 2 A1 INSTALLATION DU PILOTE ET DU LOGICIEL... 3 A2 CONFIGURATION ET MISES A JOUR DU LOGICIEL
Synthèse d'images I. Venceslas BIRI IGM Université de Marne La
 Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Synthèse d'images I Venceslas BIRI IGM Université de Marne La La synthèse d'images II. Rendu & Affichage 1. Introduction Venceslas BIRI IGM Université de Marne La Introduction Objectif Réaliser une image
Usine Numérique Intégration Produit Production
 Usine Numérique Intégration Produit Production Bernard Hoessler Manufacturing Business Group EMEA Paris 25 Novembre 2010 Du monde virtuel au monde réél Page 2 Stratégie développée dans l industrie Exploiter
Usine Numérique Intégration Produit Production Bernard Hoessler Manufacturing Business Group EMEA Paris 25 Novembre 2010 Du monde virtuel au monde réél Page 2 Stratégie développée dans l industrie Exploiter
Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière
 Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière Principaux contributeurs: Zhang Xiaopeng (CASIA-NLPR-LIAMA Coordinateur Groupe Image) Li HongJun (CASIA-NLPR-LIAMA
Développements algorithmiques au LIAMA et àamap en vue de l'analyse d'une scène forestière Principaux contributeurs: Zhang Xiaopeng (CASIA-NLPR-LIAMA Coordinateur Groupe Image) Li HongJun (CASIA-NLPR-LIAMA
Interception des signaux issus de communications MIMO
 Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
Interception des signaux issus de communications MIMO par Vincent Choqueuse Laboratoire E 3 I 2, EA 3876, ENSIETA Laboratoire LabSTICC, UMR CNRS 3192, UBO 26 novembre 2008 Interception des signaux issus
FORD C-MAX + FORD GRAND C-MAX CMAX_Main_Cover_2013_V3.indd 1-3 22/08/2012 15:12
 1 2 3 4 5 6 7 8 9 10 12,999,976 km 9,136,765 km 1,276,765 km 499,892 km 245,066 km 112,907 km 36,765 km 24,159 km 7899 km 2408 km 76 km 12 14 16 1 12 7 3 1 6 2 5 4 3 11 9 10 8 18 20 21 22 23 24 26 28 30
1 2 3 4 5 6 7 8 9 10 12,999,976 km 9,136,765 km 1,276,765 km 499,892 km 245,066 km 112,907 km 36,765 km 24,159 km 7899 km 2408 km 76 km 12 14 16 1 12 7 3 1 6 2 5 4 3 11 9 10 8 18 20 21 22 23 24 26 28 30
Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services
 69 Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services M. Bakhouya, J. Gaber et A. Koukam Laboratoire Systèmes et Transports SeT Université de Technologie de Belfort-Montbéliard
69 Vers une approche Adaptative pour la Découverte et la Composition Dynamique des Services M. Bakhouya, J. Gaber et A. Koukam Laboratoire Systèmes et Transports SeT Université de Technologie de Belfort-Montbéliard
Business Intelligence avec Excel, Power BI et Office 365
 Avant-propos A. À qui s adresse ce livre? 9 1. Pourquoi à chaque manager? 9 2. Pourquoi à tout informaticien impliqué dans des projets «BI» 9 B. Obtention des données sources 10 C. Objectif du livre 10
Avant-propos A. À qui s adresse ce livre? 9 1. Pourquoi à chaque manager? 9 2. Pourquoi à tout informaticien impliqué dans des projets «BI» 9 B. Obtention des données sources 10 C. Objectif du livre 10
03/04/2007. Tâche 1 Tâche 2 Tâche 3. Système Unix. Time sharing
 3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
3/4/27 Programmation Avancée Multimédia Multithreading Benoît Piranda Équipe SISAR Université de Marne La Vallée Besoin Programmes à traitements simultanés Réseau Réseau Afficher une animation en temps
Recherche De Coalescences Binaires Étalonnage Du Détecteur
 Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
Recherche De Coalescences Binaires Étalonnage Du Détecteur Fabrice Beauville Journées Jeunes Chercheurs 18/12/2003 Les Coalescences Binaires & VIRGO Système binaire d objets compacts (étoiles à neutrons,
FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE
 Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Rapport de Projet Pluridisciplinaire Mastère spécialisé Photogrammétrie, positionnement et mesures de déformations (PPMD) FUSION DE CARTES DE PROFONDEURS EN PHOTOGRAMMETRIE ARCHITECTURALE GARDON Elzbieta
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données. Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège
 Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Le projet 3D de la Ville de Liège: réflexions sur l'exploitation des données Bernard Lechanteur, Responsable Cellule cartographie Ville de Liège La cellule cartographie La cellule cartographie n est pas
Modélisation 3D par le modèle de turbulence k-ε standard de la position de la tête sur la force de résistance rencontrée par les nageurs.
 Modélisation 3D par le modèle de turbulence k-ε standard de la position de la tête sur la force de résistance rencontrée par les nageurs. H. ZAÏDI a, S. FOHANNO a, R. TAÏAR b, G. POLIDORI a a Laboratoire
Modélisation 3D par le modèle de turbulence k-ε standard de la position de la tête sur la force de résistance rencontrée par les nageurs. H. ZAÏDI a, S. FOHANNO a, R. TAÏAR b, G. POLIDORI a a Laboratoire
Cryptologie et physique quantique : Espoirs et menaces. Objectifs 2. distribué sous licence creative common détails sur www.matthieuamiguet.
 : Espoirs et menaces Matthieu Amiguet 2005 2006 Objectifs 2 Obtenir une compréhension de base des principes régissant le calcul quantique et la cryptographie quantique Comprendre les implications sur la
: Espoirs et menaces Matthieu Amiguet 2005 2006 Objectifs 2 Obtenir une compréhension de base des principes régissant le calcul quantique et la cryptographie quantique Comprendre les implications sur la
Formations spécifiques
 Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
T2- COMMENT PASSER DE LA VITESSE DES ROUES A CELLE DE LA VOITURE? L E T U N I N G
 T2- COMMENT PASSER DE LA VITESSE DES ROUES A CELLE DE LA VOITURE? D É M A R C H E D I N V E S T I G A T I O N : L E T U N I N G Programme de seconde professionnelle Situation introductive problématique
T2- COMMENT PASSER DE LA VITESSE DES ROUES A CELLE DE LA VOITURE? D É M A R C H E D I N V E S T I G A T I O N : L E T U N I N G Programme de seconde professionnelle Situation introductive problématique
3 Approximation de solutions d équations
 3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
3 Approximation de solutions d équations Une équation scalaire a la forme générale f(x) =0où f est une fonction de IR dans IR. Un système de n équations à n inconnues peut aussi se mettre sous une telle
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur
 Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
Présentation du sujet de thèse Schémas temporels hybrides fondés sur les SVMs pour l analyse du comportement du conducteur Réalisé par : Bassem Besbes Laboratoire d Informatique, Traitement de l Information
K. Ammar, F. Bachoc, JM. Martinez. Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau
 Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
Apport des modèles de krigeage à la simulation numérique K Ammar, F Bachoc, JM Martinez CEA-Saclay, DEN, DM2S, F-91191 Gif-sur-Yvette, France Séminaire ARISTOTE - 23 octobre 2014 - Palaiseau Apport des
L utilisation du lidar terrestre en foresterie. Richard Fournier Département de géomatique appliquée
 L utilisation du lidar terrestre en foresterie Richard Fournier Département de géomatique appliquée Problématique Inventaire traditionnel : photographie aérienne imagerie satellitaire relevés manuels sur
L utilisation du lidar terrestre en foresterie Richard Fournier Département de géomatique appliquée Problématique Inventaire traditionnel : photographie aérienne imagerie satellitaire relevés manuels sur
Big Data et Graphes : Quelques pistes de recherche
 Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Big Data et Graphes : Quelques pistes de recherche Hamamache Kheddouci Laboratoire d'informatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA de Lyon/Université Claude Bernard Lyon 1/Université
Reconnaissance de gestes : approches 2D & 3D
 Reconnaissance de gestes : approches 2D & 3D Maher Mkhinini et Patrick Horain Institut Mines-Télécom/Télécom SudParis Département Électronique et Physique, 9 rue Charles Fourier, 91011 Evry, France Email
Reconnaissance de gestes : approches 2D & 3D Maher Mkhinini et Patrick Horain Institut Mines-Télécom/Télécom SudParis Département Électronique et Physique, 9 rue Charles Fourier, 91011 Evry, France Email
Windows Server 2008. Chapitre 1: Découvrir Windows Server 2008
 Windows Server 2008 Chapitre 1: Découvrir Windows Server 2008 Objectives Identifier les caractéristiques de chaque édition de Windows Server 2008 Identifier les caractéristiques généraux de Windows Server
Windows Server 2008 Chapitre 1: Découvrir Windows Server 2008 Objectives Identifier les caractéristiques de chaque édition de Windows Server 2008 Identifier les caractéristiques généraux de Windows Server
Souad EL Bernoussi. Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/
 Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Recherche opérationnelle Les démonstrations et les exemples seront traités en cours Souad EL Bernoussi Groupe d Analyse Numérique et Optimisation Rabat http ://www.fsr.ac.ma/ano/ Table des matières 1 Programmation
Modélisation du comportement habituel de la personne en smarthome
 Modélisation du comportement habituel de la personne en smarthome Arnaud Paris, Selma Arbaoui, Nathalie Cislo, Adnen El-Amraoui, Nacim Ramdani Université d Orléans, INSA-CVL, Laboratoire PRISME 26 mai
Modélisation du comportement habituel de la personne en smarthome Arnaud Paris, Selma Arbaoui, Nathalie Cislo, Adnen El-Amraoui, Nacim Ramdani Université d Orléans, INSA-CVL, Laboratoire PRISME 26 mai
Echantillonnage Non uniforme
 Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas
Echantillonnage Non uniforme Marie CHABERT IRIT/INP-ENSEEIHT/ ENSEEIHT/TéSASA Patrice MICHEL et Bernard LACAZE TéSA 1 Plan Introduction Echantillonnage uniforme Echantillonnage irrégulier Comparaison Cas