ZI SAINT-JOSEPH - B.P MANOSQUE Fax contact@astriane.com ERICC 3 EXTRAIT DU DOSSIER PÉDAGOGIQUE
|
|
|
- Charles Léonard
- il y a 8 ans
- Total affichages :
Transcription
1 ZI SAINT-JOSEPH - B.P MANOSQUE Fax contact@astriane.com ERICC 3 EXTRAIT DU DOSSIER PÉDAGOGIQUE 05/07/05 A. VITELLI Mise à jour Emission initiale B A DATE REDAC. VERIF. APPROB. OBSERVATIONS IND Ce document est la propriété d ASTRIANE. Il ne peut être ni reproduit, ni communiqué à des tiers sans autorisation écrite NT /23

2 NT ind.b page 2 SOMMAIRE 1. - INTRODUCTION DOMAINE D'APPARTENANCE : PRODUCTION MANUFACTURIÈRE (ROBOTIQUE) DÉSIGNATION CARACTÉRISTIQUES FONCTIONNELLES DESCRIPTION DU ROBOT ÉLÉMENTS DE CORRECTION DU TP ÉLÉMENTS DE CORRECTION IDENTIFICATION DU SYSTÈME ASSERVISSEMENT DE VITESSE FONCTIONNANT EN BOUCLE OUVERTE DÉPOUILLEMENT DES RÉSULTATS ÉTUDE DE LA CONCEPTION DU MOULE CONCLUSION ÉTUDE DU DEMI-BRAS DROIT DANS L'ÉTAT "BRUT DE DECOCHAGE" IDENTIFICATION DU PLAN DE JOINT DÉTERMINATION DU SENS DE MOULAGE TRAVAUX PRATIQUES DE PREMIÈRE ANNÉE TRAVAUX PRATIQUES DE DEUXIÈME ANNÉE... 23

3 NT ind.b page INTRODUCTION ERICC 3 Robot industriel vertébral 5 axes (Système interfacé ouvert) Les exigences des formations aux voies supérieures dans les domaines scientifiques et techniques imposent l utilisation d équipements à la fois «ouverts» et industriels. Accéder à l intérieur du système de commande afin d observer, adapter, vérifier les performances dynamiques du porteur confère à cet équipement toute la puissance d investigation attendue d un dispositif réellement ouvert. D autre part, l instrumentation associée au mécanisme du bras ainsi que les données recueillies sur les actionneurs des différentes articulations permettent une étude comparative entre les fonctions de commandes et les mouvements réels associés. Pourvu de son support pédagogique le robot ERICC 3 permet une étude approfondie de la robotique industrielle DOMAINE D'APPARTENANCE : PRODUCTION MANUFACTURIÈRE (ROBOTIQUE) 2.1. DÉSIGNATION Le robot didactique vertébral 5 axes de type industriel est constitué : D un logiciel de pilotage et de contrôle, D une carte d axe à installer dans un calculateur hôte (de type PC 486DX2/66 8 Mode RAM), D un coffret de puissance, D un bras porteur, Des câbles d alimentation et de raccordement, Des notices techniques, Des algorithmes des programmes, Des plans mécaniques et électriques.

4 NT ind.b page CARACTÉRISTIQUES FONCTIONNELLES Du logiciel de pilotage et de contrôle. Il permet dans un environnement Windows : La commande en point à point du robot, Le paramétrage des asservissements, La commande par interpolation linéaire du robot, La commande directe en courant de l axe 1 (lacet). La lecture des grandeurs suivantes : Vitesse et position mesurées par les codeurs, Intensité des courants moteurs, Capteurs externes, La protection par mot de passe des paramétrages et changement par défaut d une configuration usine, La commande en langage de haut niveau des tâches robotisées, La prise en compte et la gestion des entrées sorties tout ou rien, L utilisation de l interpolateur et le transformateur de coordonnées direct, inverse accessible via DDL (ouverture vers d autres méthodes de calcul). De la carte de commande d axe à installer dans un calculateur hôte. Elle permet : Le contrôle des asservissements sur les 5 axes, La configuration des correcteurs (PID ou placement des pôles), La prise en compte de signaux analogiques (8 entrées (voir offre), La génération de profil de consigne de position axe par axe : Profil d accélération constante, Profil d accélération trapézoïdale. Du coffret de puissance, il permet : L alimentation des amplificateurs de puissance (variateurs 4 quadrants) avec boucle de courant et limitation d intensité, L alimentation à partir du 220v, La commande par contacteurs des freins, La commande par électrovanne de la pince pneumatique.

5 NT ind.b page 5 Du bras porteur, il permet : Une répétabilité de 0,1 mm, Un rayon d action de 220 à750 mm, Une masse transportée de 1,5 kg, Une vitesse maximum cumulée de 1,5 m/s, Bras en alliage d aluminium moulé et usiné, Articulations réalisées par des roulements précontraints, Transmission à jeu réduit (motoréducteurs HARMONIC DRIVE) équipant les 3 premiers axes, Moteurs à courant continu, Codeurs de position incrémentaux, Une prise de pièces à serrage parallèle. Des câbles d alimentation et de liaison, ils permettent : L alimentation en 220 volt (longueur 10 m), Les liaisons entre le calculateur, le coffret de puissance et le bras (longueur 5 m). Des notices techniques, elles permettent : La définition des grandeurs associées aux différents constituants : Codeur, moteur, réducteur, Carte de commande d axes. Des algorithmes des programmes de commande, ils permettent : Le suivi d un déplacement en point à point, Le suivi d un déplacement en interpolation linéaire. Des plans mécaniques et électriques, ils permettent : La définition des constituants et leurs interrelations.

6 NT ind.b page 6
7 NT ind.b page 7 Filtre P.I.D. sortie vers DAC position de référence + rétroaction de position Σ - IM K i T e.p Σ + Σ - K d.t e.p K p rétroaction de position

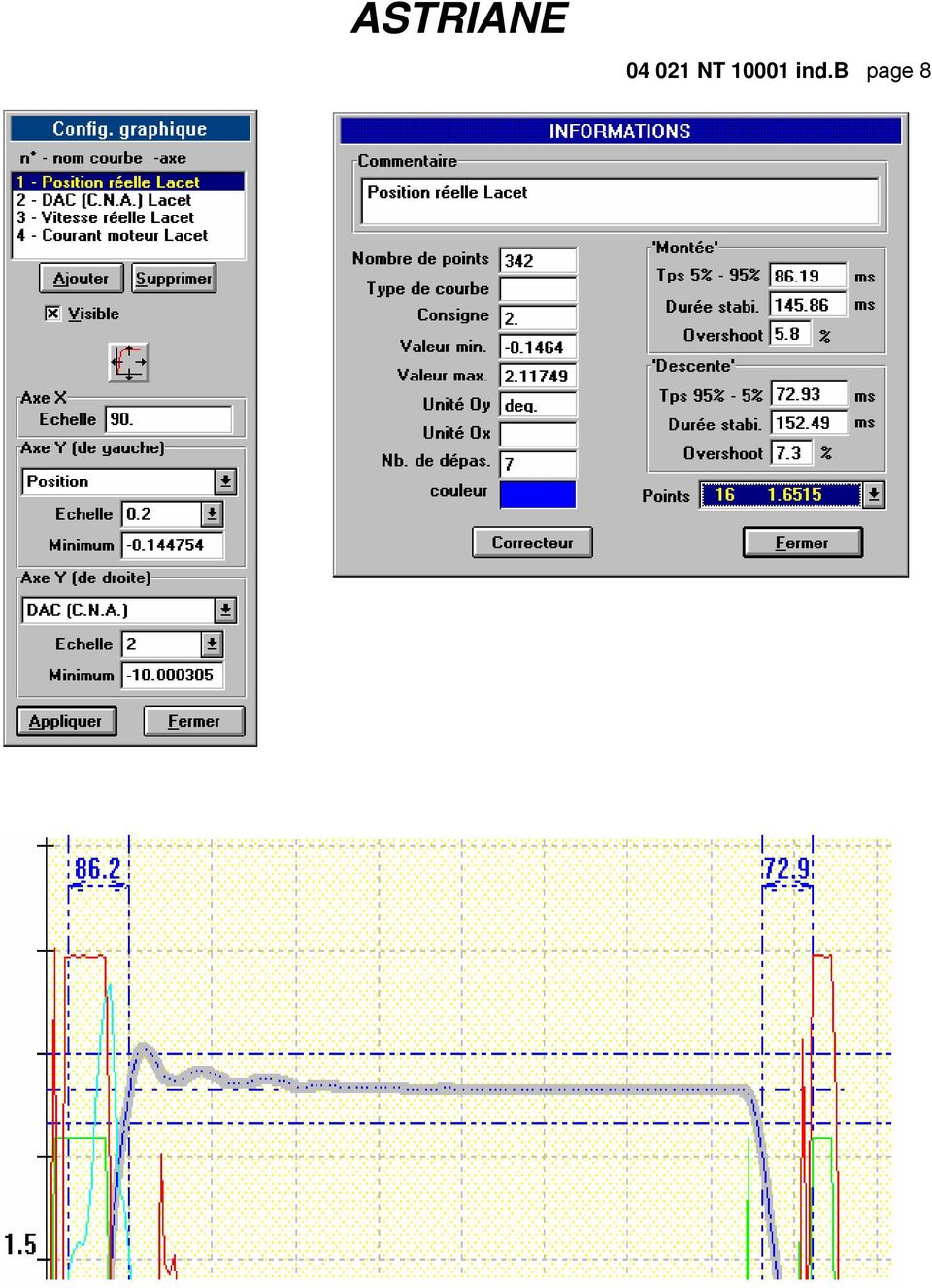
8 NT ind.b page 8
9 NT ind.b page 9

10 NT ind.b page DESCRIPTION DU ROBOT Le bras-porteur est composé de plusieurs parties : Le socle, La chaise, Le bras, L avant-bras, Le poignet, La pince. 317,5 280 AVANT-BRAS PINCE M4 O3 θ M3 θ5 +/-180 O5 θ4 +/ M5 O4 θ O2 BRAS 352 CHAISE M2 M1 O1 160 SOCLE θ1 +/-135 Figure 1 Dessin d ensemble du bras-porteur du robot.

11 NT ind.b page ÉLÉMENTS DE CORRECTION DU TP3 Z 0 =Z 1 =Z α O 3 θ 3 O 5 β θ θ O θ2 =0 O 2 θ 3 =0 θ 4 =0 O 0 X 1 =X α Vitesses angulaires : ( = 90 et = 0 ) = 0 d'où 4 = - ( ) Méthode de dérivation du vecteur position : l 2 C 2 -l 3 S 23 O 0 O 5 = 0 avec C234 = 1 et S234 = 0 l 1 -l 2 S 2 -l 3 C 23 -l 5 V X = - l 2 2 S 2 - l 3 ( ) C 23 V(O 5,5/0) = V Y = 0 V Z = - l 2 2 C 2 + l 3 ( ) S 23 Résultats d essais : tp3cons.mes et mesur.mes Figure 2 Interpolation linéaire : courbes de consignes.
 C 23 V(O 5,5/0) = V Y = 0 V Z = - l 2 2 C 2 + l 3 ( 2 + 3 ) S")
12 NT ind.b page 12 Les mesures temporelles du déplacement programmé TP4a.pmc permettent de constater que : Tous les axes démarrent en même temps, Tous les axes accélèrent en même temps (accélération constante durant un temps t a avec t a = 300 ms), Tous les axes fonctionnent à vitesse constante en même temps, Tous les axes décélèrent en même temps (décélération constante durant un temps t a ), Tous les axes s'arrêtent en même temps. Détermination des consignes de vitesses pour les 5 axes : ω moyenne = 15 = (Σ θ 2 i ) 1/2 / (t f -t a ) = 46.3 d où t f = s ω U1 = ω U3 = 20/3.087 = /s de même ω U2 = ω U4 = et ω U5 = /s Schéma de la chaîne fonctionnelle axe : Retour position θfinal Calculer les consignes de position Calculateur Produire une tension de commande proportionnel le au couple moteur Carte de commande PMAC 220 V mono. Produire une énergie électrique continue Courant continu Produire P=UI en courant continu I moteur Produire P=C mωm (commande en couple) C m Calculer les consignes de position θi Transformateur Variateur électronique Moteur électrique C.C. Chaîne cinématique Figure 3 Schéma de la chaîne fonctionnelle axe.
 1/2 / (t f -t a ) = 46.3 d où t f = 3.387 s ω U1 = ω U3 = 20/3.087 = 6.478 /s de même ω U2 = 9.393 ω U4 = 6.")
13 NT ind.b page ÉLÉMENTS DE CORRECTION Vitesses angulaires : Entrée : i(t) sortie du DAC multipliée par un coefficient de conversion tension - courant, K I (K I = 0,17 A.V -1 ) Sortie : ω(t) vitesse angulaire de l axe lacet (vitesse angulaire de l arbre moteur multipliée par le rapport de réduction, i =3/1000). Equation de la dynamique : Cm( t) Cr( t) dω( t) f. ω ( t) = J dt % CNA K I I(p) K m - 1/ f J f p Ω(p) Figure 4 Schéma-bloc de la commande en boucle ouverte. Ce qui donne dans le domaine symbolique : I I Une entrée : 0 p Une sortie : Ω(p) On a ainsi : Ω( p) = km.( I I 0 ) 1. f J p( 1+ p) f de la forme : K p( 1+ τ. p) La réponse indicielle du système d asservissement de vitesse fonctionnant en boucle ouverte est, dans le domaine temporel : ( I ) t km I 0 τ ω() t =. 1 e avec : τ= J f f
 On a ainsi : Ω( p) = km.( I I 0 ) 1. f J p( 1+ p) f de la forme : K p( 1+ τ.")
14 NT ind.b page 14 Un calcul de régression linéaire sur les valeurs finales de ω en fonction de I permet la détermination de km, pente de la droite et de km. I 0, ordonnée à f f l origine. Résultats : Le tracé (très approximatif) de la tangente à la courbe correspondant à 70% du CNA donne : τ 95ms La mesure des valeurs finales de ω lacet donne (voir résultats sur la feuille de calcul et le graphe Excel ) : ROBOT ERICC3 : COMMANDE DU LACET EN VITESSE Reponse indicielle en boucle ouverte θ1 = 0 (au départ), θ2=0, θ3=-90, θ4=0, θ5=0 % du DAC Im (A) ω lacet réel ( /s) ω moteur (rad/s) Cm 30 0,556 5,6 32,70 0, ,639 8,7 50,73 0, ,723 12,7 73,59 0, ,809 18,3 106,47 0, ,894 24,8 144,28 0, ,978 32,6 189,66 0, ,062 40,3 234,46 0, ,147 48,2 280,42 0, ,232 57,3 333,36 0, ,317 67,4 392,12 0, ,400 73,7 428,77 0, ,480 85,6 498,00 0, ,570 97,7 568,40 0, ,650 97,9 569,56 0,0710 Km (N.m/A) 0,043 rapport de réduction du lacet r = 3/1000 d'où I0 = 0,581 A Cr = Km.I0 = 2,498E-2 N.m Cm(ω) Cm en fonction de ω moteur 0,08 0,07 0,06 0,05 0,04 0,03 0,02 0,01 0, y = 8E-05x + 0,0253 R 2 = 0,985 Cm ω (rad/s) Linéaire (Cm) Figure 5 Couple moteur en fonction de la vitesse (axe du lacet). f = 8, N.m.s -1 Cr = 2, N.m
 Cm 30 0,556 5,6 32,70 0,0239 35 0,639 8,7 50,73 0,0275 40 0,723 12,7 73,59 0,0311 45 0,809 18,3 106,47 0,0348 50 0,894 24,8 144,28 0,0384 55 0,978 32,6 189,66 0,0421 60 1,062 40,3 234,46")
15 NT ind.b page IDENTIFICATION DU SYSTÈME ASSERVISSEMENT DE VITESSE FONCTIONNANT EN BOUCLE OUVERTE L identification du système va résulter de l analyse de la réponse indicielle pour différentes valeurs de la sortie du CNA (de 30% à 99% soit de 0,51 A à 1,68 A) Les courbes de réponse indicielle sont les suivantes : Figure 6 Courbes de réponse indicielle. On remarque des fluctuations importantes de la vitesse pour la partie de la réponse qui devrait correspondre à un régime permanent. La valeur finale de ω(t) est donc obtenue avec une incertitude élevée en particulier pour les courbes à partir de 95% du DAC pour lesquelles le temps d acquisition est trop court). Nota : Les discontinuités sont dues à la non-linéarité du système poulie-courroie crantée 6.2. DÉPOUILLEMENT DES RÉSULTATS L allure des réponses indicielles correspond à celle d un système du premier ordre (pente à l origine non nulle, valeur finale constante malgré les fluctuations), La tangente à l origine permet la détermination de τ et donc du rapport J f incertitude très importante. mais avec une

16 NT ind.b page 16 0,6 0,4 0,2 0, , position -0,4 de θ3 en degrés -0,6-0,8-1,0-1,2-1,4-1,6 Intensité en (A) Courbe donnant l'intensité I moteur en fonction de θ3 et θ2 = 0 teta2=90 t2=60 t2=45 t2=30 t2=0 Figure 7 Intensité calculée du coude. Mesure de l intensité fournie au moteur du coude à partir d une position définie par un programme 660. Exemple de mesure dans la configuration : Il est possible d effectuer une moyenne de l intensité à l aide du curseur ou bien en exportant le fichier de mesure dans un tableur sous la forme.csv (valeurs séparées par des points-virgules). Mesure de l intensité fournie au moteur dans les configurations particulières ci-dessus : 0,3 0,2 0,1 intensité en A ,1-0,2-0,3 Série1 Série2 Série3-0,4 théorique avec cable -0,5 sans cable angle en degres teta 3 Figure 8 Comparaison des intensités théorique et mesurées du coude. -0,6

17 NT ind.b page , poids (g) -0,4 épaule calculée coude calculée coude mesurée -0,6-0,8-1 épaule mesurée -1,2 intensité (A) Figure 9 Comparaison des intensités calculées et théoriques pour les axes du Coude et de l Epaule. 1,00 0,95 rendement 0,90 0,85 coude 0,80 0,75 0,70 0,65 épaule 0,60 0,55 0,50 poids (g) Figure 10 Rendement du coude et de l Epaule.

18 NT ind.b page ÉTUDE DE LA CONCEPTION DU MOULE Figure 11 Pièce, système de remplissage du moule et système d alimentation de la pièce. Nota : pour faciliter la lecture du croquis, la pièce est représentée débarrassée de ses bavures. Comparaison des deux chenaux : L un des deux chenaux dispose de trois attaques de coulée, l autre dispose, sur une face, de quatre attaques de coulée mais aussi de trois traces d attaques de coulée sur la face opposée. Ceci révèle qu une deuxième pièce est coulée en même temps. La disposition de ces trois attaques de coulée étant différente, il ne s agit pas du même demi - bras, mais d une autre pièce. L observation de l autre demi - bras dans l état brut de décochage montre que les attaques de coulée correspondent CONCLUSION Les deux demi - bras sont coulés en même temps, dans le même moule.

19 NT ind.b page ÉTUDE DU DEMI-BRAS DROIT DANS L ÉTAT «BRUT DE DÉCOCHAGE» 7.1. IDENTIFICATION DU PLAN DE JOINT Rappel : Le plan de joint est un plan horizontal (en coupe C-C). L observation des surfaces en dépouille (sur la pièce et sur le plan) et des attaques de coulée (sur la pièce) montre que le plan de joint se trouve, en coupe C-C, à la base des pieds de liaison. Tracé du plan de joint Figure 12 Tracé du plan de joint DÉTERMINATION DU SENS DE MOULAGE Les masselottes définissent la partie supérieure de la pièce dans le moule. Ainsi, le sens de moulage est celui de la coupe C-C : Dessin de la pièce en position dans le moule : Figure 13 Ramenés dans le plan de coupe.

20 NT ind.b page TRAVAUX PRATIQUE DE PREMIÈRE ANNÉE 5. TP1 ETUDE DES SYSTEMES Présentation Compétences visées Connaissances nouvelles. 5.4 Pré-requis Conditions de réalisation Critères d évaluation Documents pédagogiques Texte du TP Présentation Domaine d activité des robots Performances des robots Performances du robot ERICC Analyse structurelle du robot ERICC3. 6. TP2 LIAISONS, CHAINES DE SOLIDES Présentation Compétences visées Connaissances nouvelles Pré-requis Conditions de réalisation Problème technique Définition des matériels à mettre en œuvre Critères d évaluation Documents pédagogiques Texte du TP Présentation Prise en main du système robot ERICC Etude des modèles géométriques direct et inverse du bras robot ERICC Hypothèses Données complémentair es Questions Exactitude et repetabilité de pose (voir Norme NF E ) But Simplification Questions Eléments de correction du TP Prise en main du système robot ERICC Etude des modèles géométriques direct et inverse du bras du robot ERICC Exactitude et repetabilité de pose Description du robot Performances et caractéristiques des axes Courses, vitesses et accélérations Coefficient impulsions, codeur / degré. 7. TP3 CINEMATIQUE DU SOLIDE Présentation Compétences visées Connaissances nouvelles Pré-requis Problème technique Activité de l étudiant Définition des matériels à mettre en œuvre Critères d évaluation Documents associés Texte du TP Présentation : (voir documents ASTRIANE et figure 2) Prise en main du système robot ERICC Analyse de la distance entre le modèle cinématique du bras du robot ERICC3 et son comportement mesuré Hypothèses Questions Caractéristiques de vitesse de l axe lacet du robot But Démarche d expérimentation Questions Caractéristiques de vitesse de trajectoire (voir Norme NF E ) But Simplification Questions Eléments de correction du TP3. 8. TP4 AUTOMATIQUE ET CINEMATIQUE Présentation Compétences visées Connaissances nouvelles.

21 NT ind.b page Pré-requis Activité de l étudiant Critères d évaluation Documents associés Texte du TP Structure de commandes du robot Prise en main du système robot ERICC Stratégie cinématique de commande en point du robot Réponse indicielle en boucle fermée Eléments de correction du TP4. 9. TP5 SYSTEMES LINEAIRES, REPONSES INDICIELLES Présentation Compétences visées Connaissances nouvelles Pré-requis Activité de l étudiant Critères d évaluation Documents associés Texte du TP Modèle de connaissance de l asservissement de vitesse de l axe lacet fonctionnant en boucle ouverte Données Questions Identification du système, asservissement de vitesse fonctionnant en boucle ouverte Définition des postures initiale d essai du robot Questions Eléments de correction Modèles de connaissance de l asservissement de vitesse de l axe lacet fonctionnant en boucle ouverte Identification du système asservissement de vitesse fonctionnant en boucle ouverte. 10. TP6 MECANIQUE STATIQUE Présentation Compétences visées Connaissances nouvelles Pré-requis Activité de l étudiant Critères d évaluation Documents associés Texte du TP Présentation Données spécifiques à prendre en compte Prise en main du système robot ERICC Etude statique de l axe coude en un point d arrêt du robot Modélisation et calcul du couple fourni par le moteur Mesure de l intensité fournie au moteur du coude à partir d une position définie par le programme Mesure à l aide d un programme (mescoud. Mes) réalisant automatiquement la modification des positions du robot et la mesure de l intensité du moteur Comparaison des résultats obtenus d une part par le calcul, d autre part par les mesures Etude statique de l axe d épaule en un point d arrêt du robot Modélisation et calcul du couple fourni par le moteur Mesure de l intensité fournie au moteur de l épaule à partir d une position définie par un programme Mesure à l aide d un programme (mesep.mes) réalisant automatiquement la modification des positions du robot et la mesure de l intensité du moteur.
22 NT ind.b page Comparaison des résultats obtenus d une part par le calcul, d autre part par les mesures Eléments de correction Etude statique de l axe du coude en un point d arrêt du robot Etude statique de l axe de l épaule en un point d arrêt du robot Détermination du rendement du coude Détermination du rendement de l épaule. 11. TP7 CONSTRUCTION MECANIQUE (FILIERE PT) Intitulé Présentation Objectifs Stratégie Pré-requis Conditions matérielles Etude du demi-bras droit dans l état brut en sortie de fonderie Le couple procédé matériaux Les épaisseurs Les surfaces en dépouille Lecture des formes Comparaison des deux demi-bras «droite» Processus de fabrication Comparaison de la masse du demi-bras dans ces deux états.(«mise au mille») Etude de la conception du moule Opérations de parachèvements de la pièce brute Aspect des deux demi-bras Etude du demi-bras droit dans l état «brut de décochage» Identification du plan de joint Détermination du sens de moulage Définition du noyau Etude du refroidisseur Etude du bras : conception et réalisation Les grandes options Liaison des deux demi-bras Quelques éléments de correction Etude du demi-bras droit dans l état brut en sortie de fonderie Le couple procédématériau Les épaisseurs Les surfaces en dépouille Lecture des formes Comparaison des deux demi-bras «droite» Processus de fabrication Comparaison de la masse du demi-bras dans ces deux états («Mise au mille») Etude de la conception du moule Opérations de parachèvement de la pièce brute Aspect des deux demi-bras Etude du demi-bras droit dans l état «brut de decochage» Identification du plan de joint Détermination du sens de moulage Définition du noyau Etude de refroidisseur Etude du bras : conception et réalisation Les grandes options : bras en deux parties Liaison des deux demi-bras Document 1 : Abaque de Roinet Document 2 : Schéma d un chantier de moulage mécanique Document 3 : Présentation de meuleuses industrielles Meuleuse portative Meuleuse lapidaire.
23 NT ind.b page TRAVAUX PRATIQUES DE DEUXIÈME ANNÉE 12. TP2 CINETIQUE DYNAMIQUE Centres d intérêt Objectif(s) ou compétence(s) évalué(s) Pré-requis Conditions de réalisation Critères d évaluation Données techniques Travail demandé Problème réel à résoudre Questions Conclusions Données supplémentaires (issues du dossier ressource ou élaborées par le professeur) Texte du TP Présentation Détermination des caractéristiques de la distribution de la masse du robot par le calcul Hypothèses Questions Détermination des caractéristiques de la distribution de la masse du robot par la mesure des grandeurs physiques Détermination des caractéristiques Cr, f et J équi. par des essais de réponse en boucle ouverte de l axe du lacet à un échelon d intensité Détermination des caractéristiques Cr, f et J équi par des essais en réponse temporelle de l axe du lacet à un déplacement suivant une loi de mouvement programmée (Loi en trapèze) Eléments de correction Détermination des caractéristiques de la distribution de la masse du robot par le calcul Détermination des caractéristiques de la distribution de la masse du robot par la mesure de grandeurs physiques Détermination des caractéristiques Cr, f et J équi. par des essais de réponse en boucle ouverte de l axe du lacet à un échelon d intensité Détermination des caractéristiques Cr, f et J équi. par des essais en réponse temporelle de l axe du lacet à un déplacement suivant une loi de mouvement (Loi en trapèze). 13. TP3 LOGIQUE COMBINATOIRE ET SEQUENTIELLE Présentation Compétences visées Connaissances nouvelles Pré-requis Activité de l étudiant Critères d évaluation Documents associés Cahier des charges Contexte Matériel Configuration du poste Objectifs Questions Utilisation du code GRAY Utilisation du tableau de KARNAUGH Configuration du poste Apprentissage des points Test du programme et compléments du GRAFCET Eléments de corrigé Utilisation du code GRAY.
SEO 200. Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF APPLICATIONS PEDAGOGIQUES
 Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
Banc d étude du positionnement angulaire d une éolienne face au vent DESCRIPTIF Le banc SEO 200 permet d étudier et de paramétrer les boucles d asservissement de vitesse et position d une nacelle d éolienne
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Épreuve E5 : Conception détaillée. Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle
 BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
BTS Conception et Réalisation de Systèmes Automatiques Épreuve E5 : Conception détaillée Sous-épreuve E51 : Conception détaillée d une chaîne fonctionnelle Session 2013 Durée : 4 h Coefficient : 3 Matériel
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE
 BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
BACCALAURÉAT GÉNÉRAL SÉRIE SCIENTIFIQUE ÉPREUVE DE SCIENCES DE L INGÉNIEUR ÉPREUVE DU VENDREDI 20 JUIN 2014 Session 2014 Durée de l épreuve : 4 heures Coefficient 4,5 pour les candidats ayant choisi un
CONCOURS COMMUNS POLYTECHNIQUES
 CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
CONCOURS COMMUNS POLYTECHNIQUES SYSTÈME DE LEVAGE À MULTIPLES COLONNES Les sociétés de transports publics des grandes agglomérations gèrent des réseaux comportant des bus et/ou des tramways. Ces sociétés
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant
 Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
Dimensionnement d une roue autonome pour une implantation sur un fauteuil roulant I Présentation I.1 La roue autonome Ez-Wheel SAS est une entreprise française de technologie innovante fondée en 2009.
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR. Partie I - Analyse système
 SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
SCIENCES INDUSTRIELLES POUR L INGÉNIEUR COMPORTEMENT DYNAMIQUE D UN VEHICULE AUTO-BALANCÉ DE TYPE SEGWAY Partie I - Analyse système Poignée directionnelle Barre d appui Plate-forme Photographies 1 Le support
uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»
![uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»](/thumbs/18/800414.jpg "uc : Cas d utilisation Top-Chair [Utilisation normale] Fauteuil Top-Chair Déplacer le fauteuil sur tous chemins «include» «include» «extend»") TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
TopChair S c Première partie Présentation du système Plus d autonomie pour plus de liberté! TopChair S c offre aux personnes à mobilité réduite une nouvelle possibilité de se déplacer sans assistance à
Extrait des Exploitations Pédagogiques
 Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
Pédagogiques Module : Compétitivité et créativité CI Première : Compétitivité et créativité CI institutionnel : Développement durable et compétitivité des produits Support : Robot - O : Caractériser les
LA PUISSANCE DES MOTEURS. Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile?
 LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
LA PUISSANCE DES MOTEURS Avez-vous déjà feuilleté le catalogue d un grand constructeur automobile? Chaque modèle y est décliné en plusieurs versions, les différences portant essentiellement sur la puissance
TP_Codeur_Incrémental
 Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Lycée Lislet Geoffroy BTS MAI TP2 - Codeur incrémental Cod-2 Etre capable de : Décrire l allure des signaux délivrés par un codeur incrémental. Enoncer les caractéristiques principales d un codeur incrémental.
Information. BASES LITTERAIRES Etre capable de répondre à une question du type «la valeur trouvée respecte t-elle le cahier des charges?
 Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Compétences générales Avoir des piles neuves, ou récentes dans sa machine à calculer. Etre capable de retrouver instantanément une info dans sa machine. Prendre une bouteille d eau. Prendre CNI + convocation.
Figure 1 : représentation des différents écarts
 ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
ulletin officiel spécial n 9 du 30 septembre 2010 Annexe SIENES DE L INGÉNIEUR YLE TERMINAL DE LA SÉRIE SIENTIFIQUE I - Objectifs généraux Notre société devra relever de nombreux défis dans les prochaines
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
WWW.ELCON.SE Multichronomètre SA10 Présentation générale
 WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
WWW.ELCON.SE Multichronomètre SA10 Présentation générale Le SA10 est un appareil portable destiné au test des disjoncteurs moyenne tension et haute tension. Quoiqu il soit conçu pour fonctionner couplé
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
Robots CNC. WITTMANN nommé «Meilleur achat» pour les robots. Technology working for you.
 Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
Robots CNC WITTMANN nommé «Meilleur achat» pour les robots Technology working for you. Le concept robot novateur Des dizaines d années d expériences, de développements et d innovations ont fait des robots
LA MESURE INDUSTRIELLE
 E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
E02 LA MESURE INDUSTRIELLE 20 Heures Technicien responsable de la maintenance Approfondir les techniques de mesure; Prendre en compte l aspect métrologie. Connaître les limites et les facteurs d influences
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
Test : principe fondamental de la dynamique et aspect énergétique
 Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Durée : 45 minutes Objectifs Test : principe fondamental de la dynamique et aspect énergétique Projection de forces. Calcul de durée d'accélération / décélération ou d'accélération / décélération ou de
Gestion et entretien des Installations Electriques BT
 Durée : 5 jours Gestion et entretien des Installations Electriques BT Réf : (TECH.01) ² Connaître les paramètres d une installation basse tension, apprendre les bonnes méthodes de gestion et entretien
Durée : 5 jours Gestion et entretien des Installations Electriques BT Réf : (TECH.01) ² Connaître les paramètres d une installation basse tension, apprendre les bonnes méthodes de gestion et entretien
SUIVEUR SOLAIRE : Informations complémentaires
 SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVEUR SOLAIRE : Informations complémentaires IMPORTANT : L objectif de la présente note technique n est pas de se substituer à l ouvrage «Alimentation électrique de sites isolés» mais de fournir des
SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION)
") Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Terminale S CHIMIE TP n 2b (correction) 1 SUIVI CINETIQUE PAR SPECTROPHOTOMETRIE (CORRECTION) Objectifs : Déterminer l évolution de la vitesse de réaction par une méthode physique. Relier l absorbance
Tâche complexe produite par l académie de Clermont-Ferrand. Mai 2012 LE TIR A L ARC. (d après une idée du collège des Portes du Midi de Maurs)
") (d après une idée du collège des Portes du Midi de Maurs) Table des matières Fiche professeur... 2 Fiche élève... 5 1 Fiche professeur Niveaux et objectifs pédagogiques 5 e : introduction ou utilisation
(d après une idée du collège des Portes du Midi de Maurs) Table des matières Fiche professeur... 2 Fiche élève... 5 1 Fiche professeur Niveaux et objectifs pédagogiques 5 e : introduction ou utilisation
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive. Version 1.0
 Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
Système à enseigner : Robot M.I.M.I. MultipodeIntelligent à Mobilité Interactive Sommaire - Le Robot M.I.M.I. (Multipode Intelligent à Mobilité Interactive) - Présentation du Système à Enseigner. - Composition
1 Définition. 2 Systèmes matériels et solides. 3 Les actions mécaniques. Le système matériel : Il peut être un ensemble.un sous-ensemble..
 1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
1 Définition GÉNÉRALITÉS Statique 1 2 Systèmes matériels et solides Le système matériel : Il peut être un ensemble.un sous-ensemble..une pièce mais aussi un liquide ou un gaz Le solide : Il est supposé
 Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
Utilisation d informations visuelles dynamiques en asservissement visuel Armel Crétual IRISA, projet TEMIS puis VISTA L asservissement visuel géométrique Principe : Réalisation d une tâche robotique par
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Monte charge de cuisine PRESENTATION DU MONTE CHARGE
 Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
Nom.. Prénom.. Monte charge de cuisine Réalisation /0 Mise en service /0 Dépannage /0 PRESENTATION DU MONTE CHARGE M ~ S0 (Atu) S (appel pour monter) S (descente) H (descendez les déchets S.V.P.!) Sh Salle
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Catalogue - Formation en «électropneumatique et systèmes automatisés process control system»
 entre echnologies Avancées Catalogue - en «électropneumatique et systèmes automatisés process control system» 2012-2013 Boulevard du Château 12, 7800 ATH Tél : 068/26.88.80 Fax : 068/26.88.81 E-Mail :
entre echnologies Avancées Catalogue - en «électropneumatique et systèmes automatisés process control system» 2012-2013 Boulevard du Château 12, 7800 ATH Tél : 068/26.88.80 Fax : 068/26.88.81 E-Mail :
Formations spécifiques
 Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
Formations spécifiques Sensibilisation aux risques électriques et sécurité lors des interventions de maintenance Durée : 2 journées Tout technicien travaillant sur des installations industrielles automatisées
Mesures et incertitudes
 En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
En physique et en chimie, toute grandeur, mesurée ou calculée, est entachée d erreur, ce qui ne l empêche pas d être exploitée pour prendre des décisions. Aujourd hui, la notion d erreur a son vocabulaire
FICHE 1 Fiche à destination des enseignants
 FICHE 1 Fiche à destination des enseignants 1S 8 (b) Un entretien d embauche autour de l eau de Dakin Type d'activité Activité expérimentale avec démarche d investigation Dans cette version, l élève est
FICHE 1 Fiche à destination des enseignants 1S 8 (b) Un entretien d embauche autour de l eau de Dakin Type d'activité Activité expérimentale avec démarche d investigation Dans cette version, l élève est
MBR225. Le module a été conçu et réalisé conformément aux normes en vigueur portant sur la sûreté et la fiabilité des installations industrielles.
 MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
MBR225 Module de surveillance des chaînes cinématiques Le module est dédié à la surveillance du fonctionnement de machines dont la chaîne cinématique constitue un facteur important de sécurité : treuil,
Etude du SIMULATEUR DE VOL «FLY-HO»
 ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
ECOLE NATIONALE DE L AVIATION CIVILE Session 212 CONCOURS DE RECRUTEMENT D ELEVES INGENIEURS DU CONTROLE DE LA NAVIGATION AERIENNE Epreuve optionnelle obligatoire de SCIENCES INDUSTRIELLES POUR L INGENIEUR
Génie Industriel et Maintenance
 Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
Génie Industriel et Maintenance Pour qu aucun de ces systèmes ne tombe en panne. Plan de la visite 1 2 3 6 4 5 Guide visite du département Génie Industriel et Maintenance 1 Salles Informatiques Utilisation
Force de serrage 123 N.. 21800 N. Pince de préhension parallèle à 2 doigts PGN-plus 160 avec doigts de préhension spécifiques à la pièce à manipuler
 PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
PGN-plus Tailles 40.. 380 Poids 0.08 kg.. 39.5 kg Force de serrage 123 N.. 21800 N Course par doigt 2 mm.. 45 mm Poids de pièce recommandé 0.62 kg.. 80.5 kg Exemple d application Poste de chargement de
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
Mesure de la dépense énergétique
 Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Mesure de la dépense énergétique Bioénergétique L énergie existe sous différentes formes : calorifique, mécanique, électrique, chimique, rayonnante, nucléaire. La bioénergétique est la branche de la biologie
Logique binaire. Aujourd'hui, l'algèbre de Boole trouve de nombreuses applications en informatique et dans la conception des circuits électroniques.
 Logique binaire I. L'algèbre de Boole L'algèbre de Boole est la partie des mathématiques, de la logique et de l'électronique qui s'intéresse aux opérations et aux fonctions sur les variables logiques.
Logique binaire I. L'algèbre de Boole L'algèbre de Boole est la partie des mathématiques, de la logique et de l'électronique qui s'intéresse aux opérations et aux fonctions sur les variables logiques.
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX
 SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
SEANCE 4 : MECANIQUE THEOREMES FONDAMENTAUX 1. EXPERIENCE 1 : APPLICATION DE LA LOI FONDAMENTALE DE LA DYNAMIQUE a) On incline d un angle α la table à digitaliser (deuxième ou troisième cran de la table).
Soit la fonction affine qui, pour représentant le nombre de mois écoulés, renvoie la somme économisée.
 ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
ANALYSE 5 points Exercice 1 : Léonie souhaite acheter un lecteur MP3. Le prix affiché (49 ) dépasse largement la somme dont elle dispose. Elle décide donc d économiser régulièrement. Elle a relevé qu elle
10 leçon 2. Leçon n 2 : Contact entre deux solides. Frottement de glissement. Exemples. (PC ou 1 er CU)
") 0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
0 leçon 2 Leçon n 2 : Contact entre deu solides Frottement de glissement Eemples (PC ou er CU) Introduction Contact entre deu solides Liaisons de contact 2 Contact ponctuel 2 Frottement de glissement 2
André Crosnier LIRMM 04 67 41 86 37 crosnier@lirmm.fr. ERII4, Robotique industrielle 1
 André Crosnier LIRMM 04 67 41 86 37 crosnier@lirmm.fr ERII4, Robotique industrielle 1 Obectifs du cours 1. Définitions et terminologie 2. Outils mathématiques pour la modélisation 3. Modélisation des robots
André Crosnier LIRMM 04 67 41 86 37 crosnier@lirmm.fr ERII4, Robotique industrielle 1 Obectifs du cours 1. Définitions et terminologie 2. Outils mathématiques pour la modélisation 3. Modélisation des robots
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations
 Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES. Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov
 1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
1 MOTORISATION DIRECTDRIVE POUR NOS TELESCOPES Par C.CAVADORE ALCOR-SYSTEM WETAL 2013 10 Nov Pourquoi motoriser un télescope? 2 Pour compenser le mouvement de la terre (15 /h) Observation visuelle Les
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
MODE OPÉRATOIRE. VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.
 Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD.") VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
VI) Le projet mené dans le cadre de la technologie. Le projet porte sur la réalisation d une horloge CD. 1 La réalisation se déroule en plusieurs phases : - analyse préalable du besoin : étude de l appel
Chapitre 7. Circuits Magnétiques et Inductance. 7.1 Introduction. 7.1.1 Production d un champ magnétique
 Chapitre 7 Circuits Magnétiques et Inductance 7.1 Introduction 7.1.1 Production d un champ magnétique Si on considère un conducteur cylindrique droit dans lequel circule un courant I (figure 7.1). Ce courant
Chapitre 7 Circuits Magnétiques et Inductance 7.1 Introduction 7.1.1 Production d un champ magnétique Si on considère un conducteur cylindrique droit dans lequel circule un courant I (figure 7.1). Ce courant
BACCALAURÉAT TECHNOLOGIQUE SESSION 2008 POSITIONNEUR DE PANNEAU SOLAIRE POUR CAMPING-CAR
 BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
BACCALAURÉAT TECHNOLOGIQUE SÉRIE SCIENCES ET TECHNIQUES INDUSTRIELLES GÉNIE ÉLECTROTECHNIQUE SESSION 2008 ÉPREUVE: ÉTUDE DES CONSTRUCTIONS Durée: 4 heures Coefficient : 6 POSITIONNEUR DE PANNEAU SOLAIRE
Electricien(ne) Automaticien(ne)
 Automaticien(ne)") Enseignement technique Section de qualification 3 ème degré Electricien(ne) Automaticien(ne) Institut Saint-Joseph (Ecole Technique) Troisième degré Technique de qualification Electricien(ne) - Automaticien(ne)
Enseignement technique Section de qualification 3 ème degré Electricien(ne) Automaticien(ne) Institut Saint-Joseph (Ecole Technique) Troisième degré Technique de qualification Electricien(ne) - Automaticien(ne)
ORIENTATIONS POUR LA CLASSE DE TROISIÈME
 51 Le B.O. N 1 du 13 Février 1997 - Hors Série - page 173 PROGRAMMES DU CYCLE CENTRAL 5 e ET 4 e TECHNOLOGIE En continuité avec le programme de la classe de sixième, celui du cycle central du collège est
51 Le B.O. N 1 du 13 Février 1997 - Hors Série - page 173 PROGRAMMES DU CYCLE CENTRAL 5 e ET 4 e TECHNOLOGIE En continuité avec le programme de la classe de sixième, celui du cycle central du collège est
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux mathieu.bardoux@univ-littoral.fr IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX
 BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
BACCALAURÉAT TECHNOLOGIQUE Sciences et Technologies de l Industrie et du Développement Durable ENSEIGNEMENTS TECHNOLOGIQUES TRANSVERSAUX Coefficient 8 Durée 4 heures Aucun document autorisé Calculatrice
T.P. 7 : Définir et contrôler un système d allumage statique
 T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
T.P. 7 : Définir et contrôler un système d allumage statique Nom : Prénom : Classe : Date : Durée : 6 heures Zone de travail : Classe de cours et atelier Objectif du T.P. : - Être capable d identifier
2105-2110 mm 1695 mm. 990 mm Porte-à-faux avant. Modèle de cabine / équipage Small, simple / 3. Codage 46804211 46804311 46804511
 CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
CANTER 3S13 2105-2110 mm 1695 mm 990 mm Porte-à-faux avant 3500 3995 4985 Longueur max. de carrosserie** 2500 2800 3400 Empattement 4635 4985 5785 Longueur hors tout Masses/dimensions Modèle 3S13 Modèle
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
- MANIP 2 - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE
 - MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
- MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
Manutentions manuelles Statistique nationale / Ile de France 1992
 Unité d Ergonomie Faculté de Médecine Pitié-Salpêtrière 91, bd de l Hôpital 75 634 Paris cedex 13 www.ergonomie.chups.jussieu.fr DIPLÔME D ERGONOMIE ET DE PHYSIOLOGIE DU TRAVAIL option1 Ergonomie du travail
Unité d Ergonomie Faculté de Médecine Pitié-Salpêtrière 91, bd de l Hôpital 75 634 Paris cedex 13 www.ergonomie.chups.jussieu.fr DIPLÔME D ERGONOMIE ET DE PHYSIOLOGIE DU TRAVAIL option1 Ergonomie du travail
UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX
 UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX PLAN
UNIVERSITE D'ORLEANS ISSOUDUN CHATEAUROUX PLAN
La solution à vos mesures de pression
 Mesure de force linéique La solution à vos mesures de pression Sensibilité Répétabilité Stabilité Le système X3 de XSENSOR propose un concept innovant spécialement adapté pour vos applications de mesure
Mesure de force linéique La solution à vos mesures de pression Sensibilité Répétabilité Stabilité Le système X3 de XSENSOR propose un concept innovant spécialement adapté pour vos applications de mesure
L AUTOMATISME LE SIGNAL
 L AUTOMATISME LE SIGNAL Page 1 sur 7 Sommaire : 1- Champ de l automatisme définitions 2- Correspondance entre phénomènes physiques et signaux a. Capteur b. Exemple de capteur TOR c. Exemple de capteur
L AUTOMATISME LE SIGNAL Page 1 sur 7 Sommaire : 1- Champ de l automatisme définitions 2- Correspondance entre phénomènes physiques et signaux a. Capteur b. Exemple de capteur TOR c. Exemple de capteur
EXERCICE 2 : SUIVI CINETIQUE D UNE TRANSFORMATION PAR SPECTROPHOTOMETRIE (6 points)
") BAC S 2011 LIBAN http://labolycee.org EXERCICE 2 : SUIVI CINETIQUE D UNE TRANSFORMATION PAR SPECTROPHOTOMETRIE (6 points) Les parties A et B sont indépendantes. A : Étude du fonctionnement d un spectrophotomètre
BAC S 2011 LIBAN http://labolycee.org EXERCICE 2 : SUIVI CINETIQUE D UNE TRANSFORMATION PAR SPECTROPHOTOMETRIE (6 points) Les parties A et B sont indépendantes. A : Étude du fonctionnement d un spectrophotomètre
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort
 Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Développement de lois et de structures de réglages destinées à la téléopération avec retour d effort Thomas Delwiche, Laurent Catoire et Michel Kinnaert Faculté des Sciences Appliquées Service d Automatique
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Items étudiés dans le CHAPITRE N5. 7 et 9 p 129 D14 Déterminer par le calcul l'antécédent d'un nombre par une fonction linéaire
 CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
CHAPITRE N5 FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION FONCTIONS LINEAIRES NOTION DE FONCTION Code item D0 D2 N30[S] Items étudiés dans le CHAPITRE N5 Déterminer l'image
Chapitre 0 : Généralités sur la robotique 1/125
 Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
Chapitre 0 : Généralités sur la robotique 1/125 Historique de la robotique Étymologie : le mot tchèque robota (travail). Définition : un robot est un système mécanique polyarticulé mû par des actionneurs
document proposé sur le site «Sciences Physiques en BTS» : http://nicole.cortial.net BTS AVA 2015
 BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
BT V 2015 (envoyé par Frédéric COTTI - Professeur d Electrotechnique au Lycée Régional La Floride Marseille) Document 1 - Etiquette énergie Partie 1 : Voiture à faible consommation - Une étiquette pour
EQUIPEMENTS ELECTRONIQUES : MAINTENANCE
 MINISTERE DE LA COMMUNAUTE FRANCAISE ADMINISTRATION GENERALE DE L ENSEIGNEMENT ET DE LA RECHERCHE SCIENTIFIQUE ENSEIGNEMENT DE PROMOTION SOCIALE DE REGIME 1 DOSSIER PEDAGOGIQUE UNITE DE FORMATION EQUIPEMENTS
MINISTERE DE LA COMMUNAUTE FRANCAISE ADMINISTRATION GENERALE DE L ENSEIGNEMENT ET DE LA RECHERCHE SCIENTIFIQUE ENSEIGNEMENT DE PROMOTION SOCIALE DE REGIME 1 DOSSIER PEDAGOGIQUE UNITE DE FORMATION EQUIPEMENTS
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Serrure Motorisée Asservie - Mise en Applique
 ZD313357 Ve B MAJ le 21.03.13 Serrure Motorisée Asservie - Mise en Applique Notice d installation Verrouillage motorisé 1 / 2 point (s). Système à sécurité positive (rupture de courant) Conforme à la norme
ZD313357 Ve B MAJ le 21.03.13 Serrure Motorisée Asservie - Mise en Applique Notice d installation Verrouillage motorisé 1 / 2 point (s). Système à sécurité positive (rupture de courant) Conforme à la norme
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Il se peut que le produit livré diffère de l illustration.
 1 Températures ambiantes min. / max. +0 C / +50 C Indice de protection IP65 Tension de service des équipements électroniques 24 V CC Tolérance de tension de l électronique -15% / +20% Tension de service
1 Températures ambiantes min. / max. +0 C / +50 C Indice de protection IP65 Tension de service des équipements électroniques 24 V CC Tolérance de tension de l électronique -15% / +20% Tension de service
GENIE DES SYSTEMES INDUSTRIELS
 MASTER SCIENCES, TECHNOLOGIES, SANTE/STAPS GENIE DES SYSTEMES INDUSTRIELS Spécialité Risques Industriels et Maintenance www.univ-littoral.fr OBJECTIFS DE LA FORMATION L objectif du master régional GSI
MASTER SCIENCES, TECHNOLOGIES, SANTE/STAPS GENIE DES SYSTEMES INDUSTRIELS Spécialité Risques Industriels et Maintenance www.univ-littoral.fr OBJECTIFS DE LA FORMATION L objectif du master régional GSI
ASSURANCE QUALITE WORLDSKILLS
 5 Date Approuvé ASSURANCE QUALITE WORLDSKILLS Description technique Conception et dessin industriel en mécanique/cdao Document No. TD5 Révision Projet de texte Suite à une résolution votée par le Comité
5 Date Approuvé ASSURANCE QUALITE WORLDSKILLS Description technique Conception et dessin industriel en mécanique/cdao Document No. TD5 Révision Projet de texte Suite à une résolution votée par le Comité
Zoom sur La Poursuite Solaire
 Zoom sur La Poursuite Solaire www.solar-tracking.com Optimiser le rendement énergétique Le réchauffement climatique mondial et la volonté commune de réduire les émissions de gaz à effet de serre ont relancé
Zoom sur La Poursuite Solaire www.solar-tracking.com Optimiser le rendement énergétique Le réchauffement climatique mondial et la volonté commune de réduire les émissions de gaz à effet de serre ont relancé
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Classe : 1 ère STL Enseignement : Mesure et Instrumentation. d une mesure. Titre : mesure de concentration par spectrophotométrie
 Classe : 1 ère STL Enseignement : Mesure et Instrumentation THEME du programme : mesures et incertitudes de mesures Sous-thème : métrologie, incertitudes Extrait du BOEN NOTIONS ET CONTENUS Mesures et
Classe : 1 ère STL Enseignement : Mesure et Instrumentation THEME du programme : mesures et incertitudes de mesures Sous-thème : métrologie, incertitudes Extrait du BOEN NOTIONS ET CONTENUS Mesures et
Les algorithmes de base du graphisme
 Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
Les algorithmes de base du graphisme Table des matières 1 Traçage 2 1.1 Segments de droites......................... 2 1.1.1 Algorithmes simples.................... 3 1.1.2 Algorithmes de Bresenham (1965).............
BREVET D ETUDES PROFESSIONNELLES REPRESENTATION INFORMATISEE DE PRODUITS INDUSTRIELS. Epreuve EP1 Unité : UP1
 Doc 1/11 BREVET D ETUDES PROFESSIONNELLES REPRESENTATION INFORMATISEE DE PRODUITS INDUSTRIELS Epreuve EP1 Unité : UP1 Analyser une pièce et produire sa maquette numérique en fonction d'un mode d'élaboration
Doc 1/11 BREVET D ETUDES PROFESSIONNELLES REPRESENTATION INFORMATISEE DE PRODUITS INDUSTRIELS Epreuve EP1 Unité : UP1 Analyser une pièce et produire sa maquette numérique en fonction d'un mode d'élaboration
C f tracée ci- contre est la représentation graphique d une
 TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
TLES1 DEVOIR A LA MAISON N 7 La courbe C f tracée ci- contre est la représentation graphique d une fonction f définie et dérivable sur R. On note f ' la fonction dérivée de f. La tangente T à la courbe
1. Les différents types de postes de livraison On peut classer les postes HTA/BT en deux catégories.
 2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
2 Les postes HTA/BT Dès que la puissance demandée atteint 50 kva, les entreprises industrielles ou tertiaires sont alimentées en haute tension 20 kv (HTA). L étendue de leur site fait qu elles sont généralement
JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle
 RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
RECTIFICATION JONES & SHIPMAN ULTRAMAT Contrôle Easy ou CNC par écran tactile Rectifieuse Cylindrique Universelle www.jonesshipman.com www.kellenberger.com ULTRAMAT: Rectifieuses cylindriques universelles
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
EXPLOITATIONS PEDAGOGIQUES DU TABLEUR EN STG
 Exploitations pédagogiques du tableur en STG Académie de Créteil 2006 1 EXPLOITATIONS PEDAGOGIQUES DU TABLEUR EN STG Commission inter-irem lycées techniques contact : dutarte@club-internet.fr La maquette
Exploitations pédagogiques du tableur en STG Académie de Créteil 2006 1 EXPLOITATIONS PEDAGOGIQUES DU TABLEUR EN STG Commission inter-irem lycées techniques contact : dutarte@club-internet.fr La maquette
E/ECE/324/Rev.1/Add.12/Rev.7/Amend.4 E/ECE/TRANS/505/Rev.1/Add.12/Rev.7/Amend.4
 6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
6 décembre 2012 Accord Concernant l adoption de prescriptions techniques uniformes applicables aux véhicules à roues, aux équipements et aux pièces susceptibles d être montés ou utilisés sur un véhicule
ECTS INFORMATIQUE ET RESEAUX POUR L INDUSTRIE ET LES SERVICES TECHNIQUES
 ECTS INFORMATIQUE ET RESEAUX POUR L INDUSTRIE ET LES SERVICES TECHNIQUES CHAPITRES PAGES I DEFINITION 3 II CONTEXTE PROFESSIONNEL 3 HORAIRE HEBDOMADAIRE 1 er ET 2 ème ANNEE 4 FRANÇAIS 4 ANGLAIS 5 MATHEMATIQUES
ECTS INFORMATIQUE ET RESEAUX POUR L INDUSTRIE ET LES SERVICES TECHNIQUES CHAPITRES PAGES I DEFINITION 3 II CONTEXTE PROFESSIONNEL 3 HORAIRE HEBDOMADAIRE 1 er ET 2 ème ANNEE 4 FRANÇAIS 4 ANGLAIS 5 MATHEMATIQUES