Positionnement précis GNSS 4-7 juin 2013, Toulouse
|
|
|
- Joel Girard
- il y a 8 ans
- Total affichages :
Transcription
1 4-6 juin 2013, Toulouse Positionnement précis GNSS

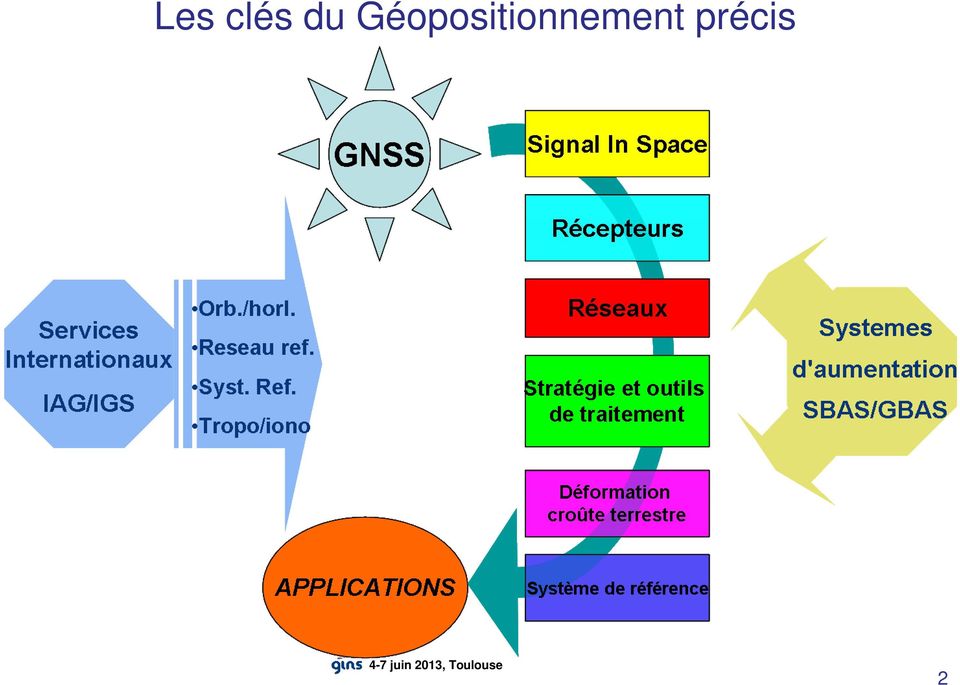
2 Les clés du Géopositionnement précis 2
3 Plan IGS Les GNSS Equation de mesure Traitement des données Perspectives

4 IGS

5 Ephemerides, horloges précises : l IGS Produits IGS, Coopération internationale pour mettre à disposition les meilleures mesures et produits pour les systèmes GNSS, pour des applications de sciences de la terre Réseau IGS : 350 stations, récepteurs de qualité géodésique

6 Produits IGS Organisation : centres de données : toutes les mesures du réseau, accessibles en ligne (ftp) centres d analyse : produits journaliers orbites/horloges, GPS/Glonass/ différents niveaux de précision selon le délai solutions combinées autres produits : iono, tropo, biais (TGD ) Exemple : produit final, solution combinée, semaine 1715, jour 0 (dimanche) igs17150.sp3.z éphémérides et horloges (15 mn) igs17150.clk.z horloges (300 s) igs17150.clk_30s.z horloges (30 s)
 igs17150.sp3.z éphémérides et horloges (15 mn) igs17150.clk.z horloges (300 s) igs17150.clk_30s.")
7 Performances orbites IGS

8 Produits et formats 8

9 9

10 Final products generated for IGS files description Sample interval format Accuracy grgwwwwn.clk (1) Daily GPS clock at 5-min intervals (30 s clocks available on request) CLK 60 ps grgwwwwn.sp3 (1) grgwwww7.snx (1) grgwwww7.erp (1) grgwwww7.sum (1) grgwwwwd.wsb (2) Daily GPS ephemeris/cl ock EOP and Stations coordinates solutions at 15-min intervals SP mm EOP :1 pt / day Coord. : 1pt/week SINEX EOP solution 1 pt / day in IGS IERS ERP format Analysis summary Wide Lane Satellite Biaises 1/week 1 value per satellite per day text 4mm Horizontal 6mm Up EOP : 30 uas EOP rate: 150 uas/day LOD : 15us 0.1 WL cycles (1) Our products are avalaible at the IGS Data Centers sites. See IGS Central Bureau Website (data & products page) for format description and access to Data center. (2) ftp://ftpsedr.cls.fr/pub/igsac/wide_lane_gps_satellite_biais.wsb
 Our products are avalaible at the IGS Data Centers sites. See IGS Central Bureau Website (data & products page) for format description and access to Data center.")
11 Doc! WSB!

12

13 Les GNSS

14 Statut des GNSS (Re)Déploiement des constellations : GPS (31/30) satellites GLONASS (29/24) satellites Galileo 4 satellites (FOC1 avec 26 satellites en 2015?) BEIDOU (16/14) 4MEO+5GEO+5IGS0 (FOC?) 7 GPS IIR-M (2005) émettent le signal L2C 4 GPS II-F (mai 2010) fréquence L5, Rubidium NG GLONASS-K (février 2011) émet un signal CDMA Galileo (octobre 2011) signal Alt-Boc, premier H-Maser Evolution : +Géom ométrie, +mesures, +fréquences, +qualité signal 14
 émet un signal CDMA Galileo (octobre 2011) signal Alt-Boc, premier H-Maser Evolution : +Géom ométrie,")
15 GNSS (GPS) signal structure Signal L1 = Porteuse L1 x Code C/A x Code P(Y) x Message Navigation Signal L2 = Porteuse L2 x Code C/A x Code P(Y) x Message Navigation 15 15
 x Message")
16 Fréquences Galileo Remarque : L 1 = 154 x f 0 L 2 = 120 x f 0 GLONASS: 1602 & 1246 MHz + n MHz, where n is a satellite's frequency channel number (n= 7, 6, 5,...0,...,6) L 5a = 118 x f 0 L 5b = 115 x f 0 16

17 Correspondance PRN/PRV 17

18 GNSS constellation and geometry GPS To scale

19 Satellite azimuth and elevation Toulouse Leica SKI-PRO software Kourou

20 O Example of satellite visibility Toulouse

21 Equation des mesures de pseudo-distance et de phase GNSS f,λ: fréquence et longueur d'onde du signal c : vitesse de la lumière t r, t e : instant de réception et d'émission du signal Δt r, Δt e : erreur d'horloge récepteur et satellite T: distance géométrique satellite-récepteur 21 21

22 Equation des mesures de pseudo-distance et de phase GNSS + DCB + IFB + ISB 22 22
23 Equation de mesure
24 Mesure = Position du récepteur + Position satellite + centre de phase recepteur + centre de phase satellite + horloge récepteur + horloge satellite + Ionosphère + troposphère + relativité + Ambiguité + phase wind-up + Biais electronique récepteur + Biais electronique satellite 24 24
25 Atmospheric effet 100 km Ionospheric Effects : The ionosphere is the atmosphere part containing free electrons and it is a dispersive medium. In such medium the speed of the electromagnetic waves is frequency dependant. -Changes the propagation time. -Very noisy (depends on solar activity). -Amplitude : 0,1-10 meters and up to 100 meters during high solar activity. -Frequency dependent -Use of a dual-band receiver can eliminate this effect km Red: optical path (measured) Purple: geometrical range Tropospheric Effects : - Depends on the pressure, the temperature, and the water vapour content along the wave path. -It affects the propagation time and the optical path. -Amplitude: Some meters but it can be partly corrected to some decimeters with a formula like: Tropospheric delay = 2.20 metres / sin (elevation)
26 Traversée e de l atmosphl atmosphère terrestre : la troposphère re S étend de 0 à 10/12 km d altitude Milieu électroniquement neutre Indice de réfraction dépend seulement de pression partielle air sec, température et pression partielle vapeur d eau : PS e n = k + T T 1. + k2. k3. e T 2 Troposphère = milieu non dispersif Au zénith : effets troposphériques valent : Peuvent atteindre 2/3 m au zénith et jusqu à 30 m à basses élévations!! Problème principal: détermination de la contribution humide ZTD. = n ds 26
27 Biais troposphérique La modélisation de la composante humide est difficile A ce jour, il est nécessaire d ajuster des paramètres spécifiques pour connaitre ce biais une autre option consiste à éliminer le biais par différentiation entre deux récepteurs proches ZTD = ZH D + ZWD Partie hydrostatique Partie humide 27
28 Modèle et paramètres du biais troposphérique Comp. hydrostatique Comp. humide «Tilt» troposphérique Herring et al. (2006) 28
29 Modèle et paramètres du biais troposphérique mf H / W ( el ) = sin ( el ) sin ( el ) a b H / W 1 + c a + H / W H / W H / W sin b H / W ( el ) + c H / W A estimer Boehm et al. (2004) mf G ( el ) = sin 1 ( el ).tan ( el ) Chen and Herring (1997) 29
30 Satellite Phase center offset Satellite orbit Phase center offset Antenna phase center Satellite positions are related to the Center of Mass of the satellite GPS signal The signal his emitted from the center of phase A phase center offset correction must be applied to the GPS data.
31 Receiver phase center offset GNSS measurements are related to the receiver antenna phase center GPS signal Usually the antenna is not located exactly at the point to estimate. A phase center offset correction must be applied to the GPS solution Antenna phase center Phase center offset Bench mark
32 PCO/PCV Les valeurs de PCO et de PCV peuvent être estimées (très lourd) ou appliquées à partir de valeurs publiées par l IGS Les valeurs IGS sont issues d un calcul et non d un étalonnage de l antenne avant lancement Les PCO et le facteur d échelle du système de référence terrestre calculé avec des données GNSS sont parfaitement corrélés d où l indetermination du scale GNSS Les valeurs publiées par l IGS sont au format ANTEX. La version actuelle (igs08.atx) il est important d utiliser des produits orbite/horloge et ANTEX cohérents!
33 Effet relativistes sur les mesures GNSS Relat. restreinte Relat. générale Rotation référentiel terrestre vs inertiel Relat. restreinte orbite circulaire Relat. restreinte effet d excentricité 33 33
34 L effet constant («net secular effect») de 38,6 µs est équivalent àun décalage de fréquence Les satellites GNSS émettent àdes fréquences qui sont décalées de leurs fréquences nominales pour corriger cet effet Exemple GPS : Termes relativistes constants Fréquence nominale utilisée dans les traitements: MHz Fréquence réelle d émission : Facteur : 38, / = f = MHz x ( ) = MHz La partie constante des corrections de relativitérestreinte et générale (orbite circulaire, Terre sphérique) sont prises en compte par défaut et ne doivent pas être corrigés par l utilisateur 34

35 Termes relativistes variables
36 «Hardware biases» DCB : Differential Code Bias Liéàla technique de mesure de la pseudo-distance du récepteur En DD ne s élimine pas entre deux récepteurs ayant des stratégies différentes! En ZD biaise les ambiguïtés (qui ne sont plus entières!) Correction : cc2noncc ISB : Inter System Bias Par exemple entre GPS et GLONASS Aujourd hui des ISB sont estimés par type de récepteur et par satellite IFB : Inter frequency bias Par exemple entre les mesures GPS : L1, L2, L5 Cf. O. Montunbruck et al
37 GNSS Ephemeris The knowledge of the satellite position as well as its clock offset are needed 3 sources : BROADCAST EPHEMERIS transmitted as part of satellite navigation message PRECISE EPHEMERIS calculated by the International GNSS Service (IGS) and several space agencies, or institutions (NASA, ESA, GFZ, MIT, NOAA, AIUB, ) The user calculates himself its own product (using GINS!)
38 Traitement des données
39 Modélisation bi-fréquence Récepteur bi-fréquence : code et phase sur chaqcune des deux fréquences MHz (f1) et MHz (f2) observables horloges (à chaque date) code P = 1 D p1 +e + h p1 ambiguité entière (par passage) P = 2 D p2 +γe + h p2 phase λ L λ L 2 = = D D L1 L2 +λ d 1 +λ 2 d windup windup e γe + h + h L1 L2 λ N 1 λ 2 1 N 2 longueur d onde windup distance de propagation (avec effet troposphérique) ionosphere (premier ordre) h = h i h différence des horloges récepteur i satellite j j
40 Exemple de la mesure de Phase L Tous les termes impactant les résidus peuvent être déterminés Vecteur d état, coordonnées des stations, Paramètres du modèle (HS gravité, Y-bias, ) Paramètres de mesure (ZTD, ambiguïtés, ) Les observations GNSS ne servent pas seulement à déterminer la position du récepteur ou l orbite du satellite Application : EOP, champ de gravité, météo, transfert de temps/fréquence,
41 Combinaison de 2 fréquences f i et f j Pseudo-Range P i, P j non ambigüe bruité Phase L i, L j ambigüe non bruité Ionospheric-Free élimine le signal iono Geometry-Free L 4 = L i L j élimine la géométrie permet d identifier les sauts de cycles Wide-Lane L 5 = f i 1 f j ( f L f L ) i i j j permet de fixer N i -N j 41
42 Combinaison Melbourne-Wubbena λ=86 cm N=N 1 -N 2 Bernese GPS SoftwareVersion 5.0, Edited by Rolf Dach, Urs Hugentobler, Pierre Fridez, Michael Meindl (2007)
43 Combinaison Multi-path MP MP 1 Improving the Precision and Accuracy of Geodetic GPS: Applications to Multipath and Seismology. Andria L. Bilich (2006)
44 Détection des sauts de cycles Méthode : analyse de plusieurs combinaisons Par exemple : - Dérivées finie d ordre4 de L 1 et L 2 permet d isoler les «grands» sauts de cycles (on utilise les dérivées d ordre 4 pour annuler les variations de la distance émetteurrécepteur causée par l orbite du satellite et la rotation terrestre) - Dérivées finies d ordre 1 de la combinaison : - Melbourne Wubbena Wide Lane - L4 Geometry-Free (GF) /!\ Un saut de cycle n est pas visible sur toutes les combinaisons!! Ex : un saut identique de n cycle(s) sur L1 et L2 n est pas visible sur la MW-WL

45 Différence finie d ordre 4 de L1 Sauts de cycles Zoom
46 Découpage en «passages»
47 Precise Point Positioning (PPP) Very high accuracy GPS and GLONASS orbit and clock products are freely available at the IGS web site Very accurate SINGLE POINT POSITIONING is now available Using a high quality software Using IGS products : ~ 5 cm for kinematic tracking ~ 1 cm for static post-processed positioning Classic PPP doesn t solve for (integer) ambiguities which limits the precision Integer ambiguity PPP (i-ppp) is becoming possible
48 Résolution des ambiguïtés La résolution des ambiguïtés entiers est nécessaire pour un traitement précis Illustration au travers du cas «classique» GPS L1 & L2 C est un challenge : Trouver la solution entière a des paramètres estimés comme des réels plusieurs dizaines de publications par an depuis 1990! Key words : QIF, LAMBDA, Tous les algorithmes sont basés sur : La matrice variance-covariance combinaisons des mesures P1, P2, L1, L2 Espace de recherche L1 L2 L2 L1
49 Résolution des ambiguïtés au CA CNES-CLS de l IGS Principe «classique» : Détermination de N2-N1 en utilisant la combinaison Wide- Lane/Melbourne-Wubbena report de N2-N1 dans la combinaison Iono-Free et résolution de N1 (et N2) Originalité : Traitement des données «zero-différence» au lieu de «doubledifférences» Nécessité de gérer les biais «hardware»
50 Biais hardware des satellites L idée que les biais «hardware» des satellites puisse être déterminés est a la base de l idée de traiter les données en mode «zéro-différence» Le problème est de découpler les biais satellites et récepteurs qui sont 100% corrélés Idée de base : Utiliser un sous-réseau mondial de récepteurs de la même marque dont on suppose que les biais sont «petits» puis : Les biais satellites sont estimés Les biais du réseau complet sont estimés Le processus est itéré (et converge) Les biais satellites sont très stables. Les biais du jour J servent de valeur initiale au jour J+1 Dans la pratique, c est la combinaison Wide-Lane des biais qui est déterminée (et non les biais L1 et L2 séparément)
51 Solution des WSB (Wide-lane Satellite Biases) WSBREF.res.dat (
52 AMBIGUITY FIXING FOR PPP AT CNES-CLS IGS AC GRG products from a global network (see Weekly Hardware WSBs Weekly Sat. Orbits IGS Weekly Integer Sat. Clocks Users: methodology for «Integer» PPP (IPPP) WSBs GRG Orbits GRG Sat. Clocks WL combinations - Integer (N1-N2) - WL Rec. Biases Iono-Free combinations Single Receiver RINEX - Integer NL - Positions - Tropospheric delays - Rec. clock biases
53 Cohérence produits et modèles Les produits délivrés par les centres d analyse et par l IGS sont issus de choix de conventions et de modèles Par exemple le changement de convention «centre de phase relatifs ANTEX05 / centre de phase absolus ANTEX08» n a pas généré de discontinuité de calcul de coordonnées (17/04/2011) Si les produits d un CA ont été calculés avec certaines conventions et modèles, l utilisateur de ces prosuits doit se placer dans la même configuration Par exemple : CA CNES-CLS à implémenté une nouvelle loi d attitude des satellites au cours des pasages dans l ombre de la Terre à partir du 23/10/2011. L utilisateur des produits GRG doit en tenir compte Les produits hebdomadaires des CA sont exprimés dans une réalisation propre de l ITRF imparfaite (+/- 1 cm) et dont la qualité peut évoluer (améliorations des produits GRG de 2007 à aujourd hui) L intérêt des REPRO de l IGS est de fournir des produits historiques de meilleur qualité avec des modélisations homogènes. REPRO2 GRG disponibles fin 2013 (GR2)
54 54
55 Perspectives
56 NTRIP Real Time GNSS network NTRIP = Networked Transport of RTCM via Internet Protocol Réseau NTRIP 56

57 M-GEX 57
58 Multi GNSS et RINEX 3 Exemple de variété de mesures GNSS dans une fichier RINEX : Stations CUT0 et DLF1 63 observables!!! G 12 C1C L1C S1C C2W L2W S2W C2X L2X S2X C5X L5X S5X SYS / # / OBS TYPES S 3 C1C L1C S1C SYS / # / OBS TYPES R 12 C1C L1C S1C C1P L1P S1P C2C L2C S2C C2P L2P S2P SYS / # / OBS TYPES E 12 C1X L1X S1X C5X L5X S5X C7X L7X S7X C8X L8X S8X SYS / # / OBS TYPES J 15 C1C L1C S1C C1X L1X S1X C2X L2X S2X C5X L5X S5X C6X SYS / # / OBS TYPES L6X S6X SYS / # / OBS TYPES C 9 C2I L2I S2I C7I L7I S7I C6I L6I S6I SYS / # / OBS TYPES Rappel : G = GLONASS R = GLONASS S = SBAS E = Galileo C = COMPASS J = QZSS 58
59 Tri-fréquence O. Montenbruck, U. Hugentobler, R.Dach, P. Steigenberger, A.Hauschild, Apparent clock variations of the Block IIF-1 (SVN62), GPS satellite, GPS Solut (2012) 16: DOI /s x
60 Pour plus de details : Ecole d été GRGS CA CNES-CLS Cours EUROSAE (stage AED041)
La (les) mesure(s) GPS
 mesure(s) GPS") La (les) mesure(s) GPS I. Le principe de la mesure II. Equation de mesure GPS III. Combinaisons de mesures (ionosphère, horloges) IV. Doubles différences et corrélation des mesures V. Doubles différences
La (les) mesure(s) GPS I. Le principe de la mesure II. Equation de mesure GPS III. Combinaisons de mesures (ionosphère, horloges) IV. Doubles différences et corrélation des mesures V. Doubles différences
Le signal GPS. Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz
 Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
Le signal GPS Les horloges atomiques à bord des satellites GPS produisent une fréquence fondamentale f o = 10.23 Mhz Deux signaux en sont dérivés: L1 (fo x 154) = 1.57542 GHz, longueur d onde = 19.0 cm
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS
 GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
GEOLOCALISATION ET NAVIGATION A L AIDE DES SIGNAUX GNSS Thierry.Chapuis@cnes.fr 08/04/2014 1 EVOLUTION DU SYSTÈME GNSS 1995-2005 2005-2014 2014 GPS GNSS-1 GNSS-2 GLONASS Pas de garantie de service Dégradation
Développements actuels dans le positionnement satellites GNSS - RTCM - RTK. Moritz Lauwiner / Dr. Werner Lienhart
 Développements actuels dans le positionnement satellites GNSS - RTCM - RTK Moritz Lauwiner / Dr. Werner Lienhart Global Navigation Satellite Systems Systèmes GNSS existants et futurs NAVSTAR GPS USA, système
Développements actuels dans le positionnement satellites GNSS - RTCM - RTK Moritz Lauwiner / Dr. Werner Lienhart Global Navigation Satellite Systems Systèmes GNSS existants et futurs NAVSTAR GPS USA, système
Services internationaux en géodésie spatiale
 «40 ans du GRGS, 1971 2011» Services internationaux en géodésie spatiale F. Deleflie, D. Gambis, P. Bonnefond, et Z. Altamimi, S. Bonvalot 1 Implication GRGS dans les services «40 ans du du GRGS, 1971
«40 ans du GRGS, 1971 2011» Services internationaux en géodésie spatiale F. Deleflie, D. Gambis, P. Bonnefond, et Z. Altamimi, S. Bonvalot 1 Implication GRGS dans les services «40 ans du du GRGS, 1971
Introduction aux Systèmes de Positionnement par Satellite (GNSS)
") Introduction aux Systèmes de Positionnement par Satellite (GNSS) Stage de terrain Géopotentiel M1 1 8 octobre 2014 Emilie Klein Principe Général A quoi ça sert? Comment? Déterminer la position et la vitesse
Introduction aux Systèmes de Positionnement par Satellite (GNSS) Stage de terrain Géopotentiel M1 1 8 octobre 2014 Emilie Klein Principe Général A quoi ça sert? Comment? Déterminer la position et la vitesse
ETUDE DE MODELES PREDICTIFS DANS UN RESEAU DE STATIONS GPS PERMANENTES JAMAL ASGARI
 Ecole Doctorale Astronomie & Astrophysique d Ile de France THESE DE DOCTORAT DE L OBSERVATOIRE DE PARIS EN DYNAMIQUE DES SYSTEMES GRAVITIONNELS ETUDE DE MODELES PREDICTIFS DANS UN RESEAU DE STATIONS GPS
Ecole Doctorale Astronomie & Astrophysique d Ile de France THESE DE DOCTORAT DE L OBSERVATOIRE DE PARIS EN DYNAMIQUE DES SYSTEMES GRAVITIONNELS ETUDE DE MODELES PREDICTIFS DANS UN RESEAU DE STATIONS GPS
Avec la mise en service progressive du système. Le développement du positionnement par satellites COMMENT INTERNET ET LES TIC CHANGENT LA VIE
 Le développement du positionnement par satellites Le développement du positionnement par satellites a commencé au début des années 1970 aux Etats-Unis et il a abouti à la mise en service du GPS à partir
Le développement du positionnement par satellites Le développement du positionnement par satellites a commencé au début des années 1970 aux Etats-Unis et il a abouti à la mise en service du GPS à partir
The low-cost GNSS GEOMON system for monitoring landslide displacements
 The low-cost GNSS GEOMON system for monitoring landslide displacements M. Demierre 1,2, J.-P. Malet 3, L. Folladore 2, P. Boetzle 3,4, M. Jeanneret 2, G. Ferhat 3,4, P. Ulrich 3 Journées Aléa Gravitaire,
The low-cost GNSS GEOMON system for monitoring landslide displacements M. Demierre 1,2, J.-P. Malet 3, L. Folladore 2, P. Boetzle 3,4, M. Jeanneret 2, G. Ferhat 3,4, P. Ulrich 3 Journées Aléa Gravitaire,
I>~I.J 4j1.bJ1UlJ ~..;W:i 1U
 ~I ~~I ~ ~WI~I ~WI ~~'~.M ~ o~wj' js'~' ~ ~JA1ol..;l.:w I>~I.J 4j1.bJ1UlJ ~..;W:i 1U Exercice 1: Le modele TCP/IP est traditionnellement considere comme une pile de 5 couches. Pour chaque couche, expliquer
~I ~~I ~ ~WI~I ~WI ~~'~.M ~ o~wj' js'~' ~ ~JA1ol..;l.:w I>~I.J 4j1.bJ1UlJ ~..;W:i 1U Exercice 1: Le modele TCP/IP est traditionnellement considere comme une pile de 5 couches. Pour chaque couche, expliquer
Document d Appui n 3.3. : Repérage ou positionnement par Global Positionning System G.P.S (extrait et adapté de CAMELEO 2001)
") Document d Appui n 3.3. : Repérage ou positionnement par Global Positionning System G.P.S (extrait et adapté de CAMELEO 2001) 1. Présentation du GPS Le GPS (Global Positionning System=système de positionnement
Document d Appui n 3.3. : Repérage ou positionnement par Global Positionning System G.P.S (extrait et adapté de CAMELEO 2001) 1. Présentation du GPS Le GPS (Global Positionning System=système de positionnement
Prospective: Champ de gravité, méthodes spatiales
 Prospective: Champ de gravité, méthodes spatiales Richard Biancale Conseil Scientifique du GRGS Observatoire de Paris, 10 avril 2008 L état de l art des modèles CHAMP: modèles 50 fois moins précis que
Prospective: Champ de gravité, méthodes spatiales Richard Biancale Conseil Scientifique du GRGS Observatoire de Paris, 10 avril 2008 L état de l art des modèles CHAMP: modèles 50 fois moins précis que
Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com
 Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com La Suite LOGIX La Suite LOGIX est un ensemble de produits pour le calcul et l optimisation complète des
Représenté par Eric Mamy A22 www.a22.fr présenté par CFR & CGL Consulting www.cgl-consulting.com La Suite LOGIX La Suite LOGIX est un ensemble de produits pour le calcul et l optimisation complète des
Software and Hardware Datasheet / Fiche technique du logiciel et du matériel
 Software and Hardware Datasheet / Fiche technique du logiciel et du matériel 1 System requirements Windows Windows 98, ME, 2000, XP, Vista 32/64, Seven 1 Ghz CPU 512 MB RAM 150 MB free disk space 1 CD
Software and Hardware Datasheet / Fiche technique du logiciel et du matériel 1 System requirements Windows Windows 98, ME, 2000, XP, Vista 32/64, Seven 1 Ghz CPU 512 MB RAM 150 MB free disk space 1 CD
MANUEL UTILISATEUR DU RECEPTEUR HAICOM HI-303MMF
 MANUEL UTILISATEUR DU RECEPTEUR HAICOM HI-303MMF 1 SOMMAIRE DU MANUEL UTILISATEUR I. LE POSITIONNEMENT PAR GPS..3 II. INTRODUCTION - GPS HAICOM HI-303MMF... 4 III. COMPOSITION DU PACK GPS...5 IV. INSTALLATION
MANUEL UTILISATEUR DU RECEPTEUR HAICOM HI-303MMF 1 SOMMAIRE DU MANUEL UTILISATEUR I. LE POSITIONNEMENT PAR GPS..3 II. INTRODUCTION - GPS HAICOM HI-303MMF... 4 III. COMPOSITION DU PACK GPS...5 IV. INSTALLATION
INSTRUMENTS DE MESURE SOFTWARE. Management software for remote and/or local monitoring networks
 INSTRUMENTS DE MESURE SOFTWARE SOFTWARE Logiciel de supervision des réseaux locaux et/ou distants Management software for remote and/or local monitoring networks MIDAs EVO 4 niveaux de fonctionnalités
INSTRUMENTS DE MESURE SOFTWARE SOFTWARE Logiciel de supervision des réseaux locaux et/ou distants Management software for remote and/or local monitoring networks MIDAs EVO 4 niveaux de fonctionnalités
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Utiliser une WebCam. Micro-ordinateurs, informations, idées, trucs et astuces
 Micro-ordinateurs, informations, idées, trucs et astuces Utiliser une WebCam Auteur : François CHAUSSON Date : 8 février 2008 Référence : utiliser une WebCam.doc Préambule Voici quelques informations utiles
Micro-ordinateurs, informations, idées, trucs et astuces Utiliser une WebCam Auteur : François CHAUSSON Date : 8 février 2008 Référence : utiliser une WebCam.doc Préambule Voici quelques informations utiles
CONTEC CO., LTD. Novembre 2010
 La gamme CONTEC CONTEC CO., LTD. Novembre 2010 1 Agenda Introduction Data acquisition and control Data Communication Expansion chassis and accessory Distributed I/O and media converter Stainless steel
La gamme CONTEC CONTEC CO., LTD. Novembre 2010 1 Agenda Introduction Data acquisition and control Data Communication Expansion chassis and accessory Distributed I/O and media converter Stainless steel
Polar. Nouveautés Polar
 Polar Nouveautés Polar POLAR ELECTRO Fondé en 1977 Premier moniteur de fréquence cardiaque sans fil au monde Travail en collaboration avec les plus grands instituts sportifs & universités Reconnu comme
Polar Nouveautés Polar POLAR ELECTRO Fondé en 1977 Premier moniteur de fréquence cardiaque sans fil au monde Travail en collaboration avec les plus grands instituts sportifs & universités Reconnu comme
Institut français des sciences et technologies des transports, de l aménagement
 Institut français des sciences et technologies des transports, de l aménagement et des réseaux Session 3 Big Data and IT in Transport: Applications, Implications, Limitations Jacques Ehrlich/IFSTTAR h/ifsttar
Institut français des sciences et technologies des transports, de l aménagement et des réseaux Session 3 Big Data and IT in Transport: Applications, Implications, Limitations Jacques Ehrlich/IFSTTAR h/ifsttar
Guide des modes GPS Statique et Statique Rapide
 20 30 40 50 GPS System 500 Guide des modes GPS Statique et Statique Rapide Version 3.0 Français System GPS500 Nous vous adressons tous nos compliments pour l'achat d'un System 500 de Leica Geosystems.
20 30 40 50 GPS System 500 Guide des modes GPS Statique et Statique Rapide Version 3.0 Français System GPS500 Nous vous adressons tous nos compliments pour l'achat d'un System 500 de Leica Geosystems.
PAUL CORREIA 6 e édition
 GUIDE PRATIQUE DU PAUL CORREIA 6 e édition Groupe Eyrolles, 2012, ISBN : 978-2-212-13367-7 Table des matières AVANT-PROPOS.......................................................... 1 Organisation de l
GUIDE PRATIQUE DU PAUL CORREIA 6 e édition Groupe Eyrolles, 2012, ISBN : 978-2-212-13367-7 Table des matières AVANT-PROPOS.......................................................... 1 Organisation de l
SYSTÈME DE GAINES À SPIRALE ET RACCORDS TOURNANTS
 SYSTÈME DE GAINES À SPIRALE ET RACCORDS TOURNANTS SPIRAL PVC CONDUIT SYSTEMS AND REVOLVING FITTINGS Gaines a Spirale Matufless...page 190 Matufless spiral PVC conduit Raccords Tournants Matufless...page
SYSTÈME DE GAINES À SPIRALE ET RACCORDS TOURNANTS SPIRAL PVC CONDUIT SYSTEMS AND REVOLVING FITTINGS Gaines a Spirale Matufless...page 190 Matufless spiral PVC conduit Raccords Tournants Matufless...page
Mesures de temps de propagation de groupe sur convertisseurs de fréquence sans accès aux OL
 Mesures de temps de propagation de groupe sur convertisseurs de fréquence sans accès aux Comment mesurer le temps de propagation de groupe sur des convertisseurs de fréquence dans lesquels le ou les oscillateurs
Mesures de temps de propagation de groupe sur convertisseurs de fréquence sans accès aux Comment mesurer le temps de propagation de groupe sur des convertisseurs de fréquence dans lesquels le ou les oscillateurs
ETHERNET : Distance supportée sur fibre optique
 ETHERNET : Distance supportée sur fibre optique Un lien optique, est constitué par un ensemble de fibres, ponts de raccordement, épissures et autres éléments qui assurent une liaison efficace entre un
ETHERNET : Distance supportée sur fibre optique Un lien optique, est constitué par un ensemble de fibres, ponts de raccordement, épissures et autres éléments qui assurent une liaison efficace entre un
APPENDIX 2. Provisions to be included in the contract between the Provider and the. Holder
 Page 1 APPENDIX 2 Provisions to be included in the contract between the Provider and the Obligations and rights of the Applicant / Holder Holder 1. The Applicant or Licensee acknowledges that it has read
Page 1 APPENDIX 2 Provisions to be included in the contract between the Provider and the Obligations and rights of the Applicant / Holder Holder 1. The Applicant or Licensee acknowledges that it has read
DTS MOBATime's Distributed Time System
 GPS ou DCF 77 DTS Masterclock DTS Manager et DTS Master Software DTS MOBATime's Distributed Time System LAN Le serveur de temps multi-usage dans le nouveau Distributed Time System de MOBATIME, basé sur
GPS ou DCF 77 DTS Masterclock DTS Manager et DTS Master Software DTS MOBATime's Distributed Time System LAN Le serveur de temps multi-usage dans le nouveau Distributed Time System de MOBATIME, basé sur
Please kindly find below a synoptic table showing the various ways of transport from Mahe to La Digue, with a stop over on Praslin:
 Travel information: Island? Please kindly find below a synoptic table showing the various ways of transport from Mahe to La Digue, with a stop over on Praslin: From Mahé to Praslin From Praslin to La Digue
Travel information: Island? Please kindly find below a synoptic table showing the various ways of transport from Mahe to La Digue, with a stop over on Praslin: From Mahé to Praslin From Praslin to La Digue
THE EVOLUTION OF CONTENT CONSUMPTION ON MOBILE AND TABLETS
 THE EVOLUTION OF CONTENT CONSUMPTION ON MOBILE AND TABLETS OPPA investigated in March 2013 its members, in order to design a clear picture of the traffic on all devices, browsers and apps. One year later
THE EVOLUTION OF CONTENT CONSUMPTION ON MOBILE AND TABLETS OPPA investigated in March 2013 its members, in order to design a clear picture of the traffic on all devices, browsers and apps. One year later
Lamia Oukid, Ounas Asfari, Fadila Bentayeb, Nadjia Benblidia, Omar Boussaid. 14 Juin 2013
 Cube de textes et opérateur d'agrégation basé sur un modèle vectoriel adapté Text Cube Model and aggregation operator based on an adapted vector space model Lamia Oukid, Ounas Asfari, Fadila Bentayeb,
Cube de textes et opérateur d'agrégation basé sur un modèle vectoriel adapté Text Cube Model and aggregation operator based on an adapted vector space model Lamia Oukid, Ounas Asfari, Fadila Bentayeb,
Exemple PLS avec SAS
 Exemple PLS avec SAS This example, from Umetrics (1995), demonstrates different ways to examine a PLS model. The data come from the field of drug discovery. New drugs are developed from chemicals that
Exemple PLS avec SAS This example, from Umetrics (1995), demonstrates different ways to examine a PLS model. The data come from the field of drug discovery. New drugs are developed from chemicals that
ABB i-bus KNX Capteur météo, MS WES/A 3.1, 2CDG120046R0011
 Caractéristiques techniques 2CDC504093D0302 ABB i-bus KNX Description du produit Le capteur météo WES/A 3.1 mesure la vitesse du vent, la pluie, la luminosité en trois points de la course du soleil, le
Caractéristiques techniques 2CDC504093D0302 ABB i-bus KNX Description du produit Le capteur météo WES/A 3.1 mesure la vitesse du vent, la pluie, la luminosité en trois points de la course du soleil, le
Le second nuage : questions autour de la lumière
 Le second nuage : questions autour de la lumière Quelle vitesse? infinie ou pas? cf débats autour de la réfraction (Newton : la lumière va + vite dans l eau) mesures astronomiques (Rœmer, Bradley) : grande
Le second nuage : questions autour de la lumière Quelle vitesse? infinie ou pas? cf débats autour de la réfraction (Newton : la lumière va + vite dans l eau) mesures astronomiques (Rœmer, Bradley) : grande
www.mojortk.com 0800 756 9665 Donnez à votre équipement du mojo!
 www.mojortk.com 0800 756 9665 Donnez à votre équipement du mojo! Le nouveau No Drift mojortk de Leica Geosystems révolutionne la technologie RTK dans le secteur de l agriculture. Pourquoi choisir cette
www.mojortk.com 0800 756 9665 Donnez à votre équipement du mojo! Le nouveau No Drift mojortk de Leica Geosystems révolutionne la technologie RTK dans le secteur de l agriculture. Pourquoi choisir cette
Exercices sur SQL server 2000
 Exercices sur SQL server 2000 La diagramme de classe : Exercices sur SQL server 2000 Le modèle relationnel correspondant : 1 Créer les tables Clic-droit on Tables et choisir «New Table» Créer la table
Exercices sur SQL server 2000 La diagramme de classe : Exercices sur SQL server 2000 Le modèle relationnel correspondant : 1 Créer les tables Clic-droit on Tables et choisir «New Table» Créer la table
TABLE DES MATIERES A OBJET PROCEDURE DE CONNEXION
 1 12 rue Denis Papin 37300 JOUE LES TOURS Tel: 02.47.68.34.00 Fax: 02.47.68.35.48 www.herve consultants.net contacts@herve consultants.net TABLE DES MATIERES A Objet...1 B Les équipements et pré-requis...2
1 12 rue Denis Papin 37300 JOUE LES TOURS Tel: 02.47.68.34.00 Fax: 02.47.68.35.48 www.herve consultants.net contacts@herve consultants.net TABLE DES MATIERES A Objet...1 B Les équipements et pré-requis...2
Le Global Positionning System
 Travail de Maturité 2009 Le Global Positionning System Structure et fonctionnement Roch Jonas Tutrice : Mme Rima Halabi Petter Gymnase cantonal du Bugnon, Lausanne Résumé Pratiquant de la montagne lors
Travail de Maturité 2009 Le Global Positionning System Structure et fonctionnement Roch Jonas Tutrice : Mme Rima Halabi Petter Gymnase cantonal du Bugnon, Lausanne Résumé Pratiquant de la montagne lors
Présentation par François Keller Fondateur et président de l Institut suisse de brainworking et M. Enga Luye, CEO Belair Biotech
 Présentation par François Keller Fondateur et président de l Institut suisse de brainworking et M. Enga Luye, CEO Belair Biotech Le dispositif L Institut suisse de brainworking (ISB) est une association
Présentation par François Keller Fondateur et président de l Institut suisse de brainworking et M. Enga Luye, CEO Belair Biotech Le dispositif L Institut suisse de brainworking (ISB) est une association
Cheque Holding Policy Disclosure (Banks) Regulations. Règlement sur la communication de la politique de retenue de chèques (banques) CONSOLIDATION
 Regulations. Règlement sur la communication de la politique de retenue de chèques (banques) CONSOLIDATION") CANADA CONSOLIDATION CODIFICATION Cheque Holding Policy Disclosure (Banks) Regulations Règlement sur la communication de la politique de retenue de chèques (banques) SOR/2002-39 DORS/2002-39 Current to
CANADA CONSOLIDATION CODIFICATION Cheque Holding Policy Disclosure (Banks) Regulations Règlement sur la communication de la politique de retenue de chèques (banques) SOR/2002-39 DORS/2002-39 Current to
Gestion optimale des unités de production dans un réseau compte tenu de la dynamique de la température des lignes
 Gestion optimale des unités de production dans un réseau compte tenu de la dynamique de la température des lignes M. Nick, R. Cherkaoui, M. Paolone «Le réseau électrique de demain» - EPFL, 21.05.2015 Table
Gestion optimale des unités de production dans un réseau compte tenu de la dynamique de la température des lignes M. Nick, R. Cherkaoui, M. Paolone «Le réseau électrique de demain» - EPFL, 21.05.2015 Table
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Sébastien ROCHE le. Méthodes de poursuite de phase pour signaux GNSS multifréquence en environnement dégradé
 Institut Supérieur de l Aéronautique et de l Espace(ISAE) Sébastien ROCHE le jeudi 19 décembre 2013 Méthodes de poursuite de phase pour signaux GNSS multifréquence en environnement dégradé et discipline
Institut Supérieur de l Aéronautique et de l Espace(ISAE) Sébastien ROCHE le jeudi 19 décembre 2013 Méthodes de poursuite de phase pour signaux GNSS multifréquence en environnement dégradé et discipline
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Chapitre 02. La lumière des étoiles. Exercices :
 Chapitre 02 La lumière des étoiles. I- Lumière monochromatique et lumière polychromatique. )- Expérience de Newton (642 727). 2)- Expérience avec la lumière émise par un Laser. 3)- Radiation et longueur
Chapitre 02 La lumière des étoiles. I- Lumière monochromatique et lumière polychromatique. )- Expérience de Newton (642 727). 2)- Expérience avec la lumière émise par un Laser. 3)- Radiation et longueur
Archived Content. Contenu archivé
 ARCHIVED - Archiving Content ARCHIVÉE - Contenu archivé Archived Content Contenu archivé Information identified as archived is provided for reference, research or recordkeeping purposes. It is not subject
ARCHIVED - Archiving Content ARCHIVÉE - Contenu archivé Archived Content Contenu archivé Information identified as archived is provided for reference, research or recordkeeping purposes. It is not subject
AUTUMN/WINTER 2013-2014 PARIS COLLECTION
 AUTUMN/WINTER 2013-2014 PARIS COLLECTION RED CARPET/Realistic Style Collection Automne-Hiver 2013-2014 Rynshu, avec cette nouvelle collection, veut permettre à chacun de se révéler par un style qui lui
AUTUMN/WINTER 2013-2014 PARIS COLLECTION RED CARPET/Realistic Style Collection Automne-Hiver 2013-2014 Rynshu, avec cette nouvelle collection, veut permettre à chacun de se révéler par un style qui lui
- MANIP 2 - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE
 - MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
- MANIP 2 - - COÏNCIDENCES ET MESURES DE TEMPS - APPLICATION À LA MESURE DE LA VITESSE DE LA LUMIÈRE L objectif de cette manipulation est d effectuer une mesure de la vitesse de la lumière sur une «base
CENTRALE TELESURVEILLANCE VIA INTERNET WEB
 CENTRALE TELESURVEILLANCE VIA INTERNET WEB Votre colis standard de base contient : Centrale de mesure Une sonde de température avec câble 1 M longueur (Tête ronde enrobée) Adaptateur alimentation 220 V
CENTRALE TELESURVEILLANCE VIA INTERNET WEB Votre colis standard de base contient : Centrale de mesure Une sonde de température avec câble 1 M longueur (Tête ronde enrobée) Adaptateur alimentation 220 V
T101, serveur de temps haute précision
 T101, serveur de temps haute précision T101Compact Serveur de temps NTP/SNTP, horloge GPS de strate 1, avec PoE, et fonctions d entrées/sorties d échantillonnage et de synchronisation. T101Rack 1 Bd d
T101, serveur de temps haute précision T101Compact Serveur de temps NTP/SNTP, horloge GPS de strate 1, avec PoE, et fonctions d entrées/sorties d échantillonnage et de synchronisation. T101Rack 1 Bd d
Rayonnements dans l univers
 Terminale S Rayonnements dans l univers Notions et contenu Rayonnements dans l Univers Absorption de rayonnements par l atmosphère terrestre. Etude de documents Compétences exigibles Extraire et exploiter
Terminale S Rayonnements dans l univers Notions et contenu Rayonnements dans l Univers Absorption de rayonnements par l atmosphère terrestre. Etude de documents Compétences exigibles Extraire et exploiter
PROBLÈMES DE RELATIVITÉ RESTREINTE (L2-L3) Christian Carimalo
 Christian Carimalo") PROBLÈMES DE RELATIVITÉ RESTREINTE (L2-L3) Christian Carimalo I - La transformation de Lorentz Dans tout ce qui suit, R(O, x, y, z, t) et R (O, x, y, z, t ) sont deux référentiels galiléens dont les axes
PROBLÈMES DE RELATIVITÉ RESTREINTE (L2-L3) Christian Carimalo I - La transformation de Lorentz Dans tout ce qui suit, R(O, x, y, z, t) et R (O, x, y, z, t ) sont deux référentiels galiléens dont les axes
TEPZZ 568448A_T EP 2 568 448 A1 (19) (11) EP 2 568 448 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.
 (11) EP 2 568 448 A1 (12) DEMANDE DE BREVET EUROPEEN. (51) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.") (19) TEPZZ 68448A_T (11) EP 2 68 448 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 13.03.2013 Bulletin 2013/11 (1) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.01) (21) Numéro de dépôt:
(19) TEPZZ 68448A_T (11) EP 2 68 448 A1 (12) DEMANDE DE BREVET EUROPEEN (43) Date de publication: 13.03.2013 Bulletin 2013/11 (1) Int Cl.: G07F 7/08 (2006.01) G06K 19/077 (2006.01) (21) Numéro de dépôt:
Présentation du projet SMOS et du CATDS
 Présentation du projet SMOS et du CATDS François Bermudo Chef de projet SMOS CNES pied de page 1/ 1 LE PROGRAMME SMOS La mission SMOS a été sélectionnée comme «Mission d Opportunité» du programme Earth
Présentation du projet SMOS et du CATDS François Bermudo Chef de projet SMOS CNES pied de page 1/ 1 LE PROGRAMME SMOS La mission SMOS a été sélectionnée comme «Mission d Opportunité» du programme Earth
Les nanosatellites : pourquoi, quand, quoi, qui et où? Alfred Ng Agence spatiale canadienne
 Les nanosatellites : pourquoi, quand, quoi, qui et où? Alfred Ng Agence spatiale canadienne Aperçu Qu est est-ce qu un un nanosatellite? Pourquoi utiliser des nanosatellites? Quand cela a-t-il a commencé?
Les nanosatellites : pourquoi, quand, quoi, qui et où? Alfred Ng Agence spatiale canadienne Aperçu Qu est est-ce qu un un nanosatellite? Pourquoi utiliser des nanosatellites? Quand cela a-t-il a commencé?
Chapitre 6 La lumière des étoiles Physique
 Chapitre 6 La lumière des étoiles Physique Introduction : On ne peut ni aller sur les étoiles, ni envoyer directement des sondes pour les analyser, en revanche on les voit, ce qui signifie qu'on reçoit
Chapitre 6 La lumière des étoiles Physique Introduction : On ne peut ni aller sur les étoiles, ni envoyer directement des sondes pour les analyser, en revanche on les voit, ce qui signifie qu'on reçoit
DOCUMENTATION - FRANCAIS... 2
 DOCUMENTATION MODULE CATEGORIESTOPMENU MODULE CREE PAR PRESTACREA INDEX : DOCUMENTATION - FRANCAIS... 2 INSTALLATION... 2 CONFIGURATION... 2 LICENCE ET COPYRIGHT... 3 SUPPORT TECHNIQUE ET MISES A JOUR...
DOCUMENTATION MODULE CATEGORIESTOPMENU MODULE CREE PAR PRESTACREA INDEX : DOCUMENTATION - FRANCAIS... 2 INSTALLATION... 2 CONFIGURATION... 2 LICENCE ET COPYRIGHT... 3 SUPPORT TECHNIQUE ET MISES A JOUR...
Gestion des prestations Volontaire
 Gestion des prestations Volontaire Qu estce que l Income Management (Gestion des prestations)? La gestion des prestations est un moyen de vous aider à gérer votre argent pour couvrir vos nécessités et
Gestion des prestations Volontaire Qu estce que l Income Management (Gestion des prestations)? La gestion des prestations est un moyen de vous aider à gérer votre argent pour couvrir vos nécessités et
DOCUMENTATION MODULE BLOCKCATEGORIESCUSTOM Module crée par Prestacrea - Version : 2.0
 DOCUMENTATION MODULE BLOCKCATEGORIESCUSTOM Module crée par Prestacrea - Version : 2.0 INDEX : DOCUMENTATION - FRANCAIS... 2 1. INSTALLATION... 2 2. CONFIGURATION... 2 3. LICENCE ET COPYRIGHT... 3 4. MISES
DOCUMENTATION MODULE BLOCKCATEGORIESCUSTOM Module crée par Prestacrea - Version : 2.0 INDEX : DOCUMENTATION - FRANCAIS... 2 1. INSTALLATION... 2 2. CONFIGURATION... 2 3. LICENCE ET COPYRIGHT... 3 4. MISES
POSITION DESCRIPTION DESCRIPTION DE TRAVAIL
 Supervisor Titre du poste de la superviseure ou du superviseur : Coordinator, Communications & Political Action & Campaigns Coordonnatrice ou coordonnateur de la Section des communications et de l action
Supervisor Titre du poste de la superviseure ou du superviseur : Coordinator, Communications & Political Action & Campaigns Coordonnatrice ou coordonnateur de la Section des communications et de l action
Fabricant. 2 terminals
 Specifications Fabricant Nominal torque (Nm) 65 Minimal torque (Nm) 0,63 Coil resistance - 20 C (ohms) 20 Rated current DC (A) 1 Rotor inertia (kg.m 2 ) 2.10-3 Weight (kg) 7,20 Heat dissipation continuous
Specifications Fabricant Nominal torque (Nm) 65 Minimal torque (Nm) 0,63 Coil resistance - 20 C (ohms) 20 Rated current DC (A) 1 Rotor inertia (kg.m 2 ) 2.10-3 Weight (kg) 7,20 Heat dissipation continuous
TP 03 B : Mesure d une vitesse par effet Doppler
 TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
TP 03 B : Mesure d une vitesse par effet Doppler Compétences exigibles : - Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l effet Doppler. - Exploiter l expression du
Fonctions de la couche physique
 La Couche physique 01010110 01010110 Couche physique Signal Médium Alain AUBERT alain.aubert@telecom-st-etienne.r 0 Fonctions de la couche physique 1 1 Services assurés par la couche physique Transmettre
La Couche physique 01010110 01010110 Couche physique Signal Médium Alain AUBERT alain.aubert@telecom-st-etienne.r 0 Fonctions de la couche physique 1 1 Services assurés par la couche physique Transmettre
calls.paris-neuroscience.fr Tutoriel pour Candidatures en ligne *** Online Applications Tutorial
 calls.paris-neuroscience.fr Tutoriel pour Candidatures en ligne Online Applications Tutorial 1/4 Pour postuler aux Appels d Offres de l ENP, vous devez aller sur la plateforme : calls.parisneuroscience.fr.
calls.paris-neuroscience.fr Tutoriel pour Candidatures en ligne Online Applications Tutorial 1/4 Pour postuler aux Appels d Offres de l ENP, vous devez aller sur la plateforme : calls.parisneuroscience.fr.
Face Recognition Performance: Man vs. Machine
 1 Face Recognition Performance: Man vs. Machine Andy Adler Systems and Computer Engineering Carleton University, Ottawa, Canada Are these the same person? 2 3 Same person? Yes I have just demonstrated
1 Face Recognition Performance: Man vs. Machine Andy Adler Systems and Computer Engineering Carleton University, Ottawa, Canada Are these the same person? 2 3 Same person? Yes I have just demonstrated
Chapitre 2 Caractéristiques des ondes
 Chapitre Caractéristiques des ondes Manuel pages 31 à 50 Choix pédagogiques Le cours de ce chapitre débute par l étude de la propagation des ondes progressives. La description de ce phénomène est illustrée
Chapitre Caractéristiques des ondes Manuel pages 31 à 50 Choix pédagogiques Le cours de ce chapitre débute par l étude de la propagation des ondes progressives. La description de ce phénomène est illustrée
ERA-Net Call Smart Cities. CREM, Martigny, 4 décembre 2014 Andreas Eckmanns, Responsable de la recherche, Office Fédéral de l énergie OFEN
 ERA-Net Call Smart Cities CREM, Martigny, 4 décembre 2014 Andreas Eckmanns, Responsable de la recherche, Office Fédéral de l énergie OFEN Une Smart City, c est quoi? «Une Smart City offre à ses habitants
ERA-Net Call Smart Cities CREM, Martigny, 4 décembre 2014 Andreas Eckmanns, Responsable de la recherche, Office Fédéral de l énergie OFEN Une Smart City, c est quoi? «Une Smart City offre à ses habitants
sur le réseau de distribution
 EDF-R&D Département MIRE et Département EFESE 1, avenue du Général de Gaulle 92141 Clamart Impact qualité du site photovoltaïque "Association Soleil Marguerite" sur le réseau de distribution Responsable
EDF-R&D Département MIRE et Département EFESE 1, avenue du Général de Gaulle 92141 Clamart Impact qualité du site photovoltaïque "Association Soleil Marguerite" sur le réseau de distribution Responsable
QUELLE FIBRE UTILISER EN FONCTION DE MES APPLICATIONS. OM1, OM2 ou OM3, QUELLE EST LA FIBRE QU IL ME FAUT POUR MON INSTALLATION?
 QUELLE FIBRE UTILISER EN FONCTION DE MES APPLICATIONS LE MATCH µm VS 62,5 µm Dans les années 70, les premières fibres optiques de télécommunications avaient un coeur de µm : ces dernières ont été remplacées
QUELLE FIBRE UTILISER EN FONCTION DE MES APPLICATIONS LE MATCH µm VS 62,5 µm Dans les années 70, les premières fibres optiques de télécommunications avaient un coeur de µm : ces dernières ont été remplacées
L ESPACE À TRAVERS LE REGARD DES FEMMES. European Economic and Social Committee Comité économique et social européen
 L ESPACE À TRAVERS LE REGARD DES FEMMES 13 European Economic and Social Committee Comité économique et social européen 13 This publication is part of a series of catalogues published in the context of
L ESPACE À TRAVERS LE REGARD DES FEMMES 13 European Economic and Social Committee Comité économique et social européen 13 This publication is part of a series of catalogues published in the context of
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
ARCHOS Activity Tracker
 ARCHOS Activity Tracker «Archos Connected Self» Application Connecté pour votre confort L'ARCHOS Activity Tracker synchronise automatiquement votre activité quotidienne à votre smartphone ou votre tablette
ARCHOS Activity Tracker «Archos Connected Self» Application Connecté pour votre confort L'ARCHOS Activity Tracker synchronise automatiquement votre activité quotidienne à votre smartphone ou votre tablette
Editing and managing Systems engineering processes at Snecma
 Editing and managing Systems engineering processes at Snecma Atego workshop 2014-04-03 Ce document et les informations qu il contient sont la propriété de Ils ne doivent pas être copiés ni communiqués
Editing and managing Systems engineering processes at Snecma Atego workshop 2014-04-03 Ce document et les informations qu il contient sont la propriété de Ils ne doivent pas être copiés ni communiqués
AGROBASE : un système de gestion de données expérimentales
 AGROBASE : un système de gestion de données expérimentales Daniel Wallach, Jean-Pierre RELLIER To cite this version: Daniel Wallach, Jean-Pierre RELLIER. AGROBASE : un système de gestion de données expérimentales.
AGROBASE : un système de gestion de données expérimentales Daniel Wallach, Jean-Pierre RELLIER To cite this version: Daniel Wallach, Jean-Pierre RELLIER. AGROBASE : un système de gestion de données expérimentales.
La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS
 Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Rev. Energ. Ren. : Chemss 2000 39-44 La Recherche du Point Optimum de Fonctionnement d un Générateur Photovoltaïque en Utilisant les Réseaux NEURO-FLOUS D.K. Mohamed, A. Midoun et F. Safia Département
Systèmes de topographie
 Systèmes de topographie GNSS Trimble SYSTEMES GNSS TRIMBLE: RELEVER TOUS LES DEFIS SUR LE TERRAIN DES SOLUTIONS GNSS LEADER DE CE SECTEUR INDUSTRIEL CONÇUES POUR LES TOPOGRAPHES S'appuyant sur la pérennité
Systèmes de topographie GNSS Trimble SYSTEMES GNSS TRIMBLE: RELEVER TOUS LES DEFIS SUR LE TERRAIN DES SOLUTIONS GNSS LEADER DE CE SECTEUR INDUSTRIEL CONÇUES POUR LES TOPOGRAPHES S'appuyant sur la pérennité
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées.
 Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Les correcteurs accorderont une importance particulière à la rigueur des raisonnements et aux représentations graphiques demandées. 1 Ce sujet aborde le phénomène d instabilité dans des systèmes dynamiques
Société de Geo-engineering
 Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
Gestion de la maintenance des réseaux le géoréférencement inertiel direct, technologie automatisée d'acquisition d'objets 2D / 3D vers les SIG Société de Geo-engineering Activité d'expertise et d'ingénierie
WEB page builder and server for SCADA applications usable from a WEB navigator
 Générateur de pages WEB et serveur pour supervision accessible à partir d un navigateur WEB WEB page builder and server for SCADA applications usable from a WEB navigator opyright 2007 IRAI Manual Manuel
Générateur de pages WEB et serveur pour supervision accessible à partir d un navigateur WEB WEB page builder and server for SCADA applications usable from a WEB navigator opyright 2007 IRAI Manual Manuel
France SMS+ MT Premium Description
 France SMS+ MT Premium Description Summary Subscription : kinematics Subscription via SMS (Kinematic + messages) Subscription via Wap (Kinematic + messages) Subscription via Mix SMS / WAP Subscription
France SMS+ MT Premium Description Summary Subscription : kinematics Subscription via SMS (Kinematic + messages) Subscription via Wap (Kinematic + messages) Subscription via Mix SMS / WAP Subscription
Notice Technique / Technical Manual
 Contrôle d accès Access control Encodeur USB Mifare ENCOD-USB-AI Notice Technique / Technical Manual SOMMAIRE p.2/10 Sommaire Remerciements... 3 Informations et recommandations... 4 Caractéristiques techniques...
Contrôle d accès Access control Encodeur USB Mifare ENCOD-USB-AI Notice Technique / Technical Manual SOMMAIRE p.2/10 Sommaire Remerciements... 3 Informations et recommandations... 4 Caractéristiques techniques...
Ground Geolocation Challenges
 83230349-DOC-TAS-FR-001 Ground Geolocation Challenges Workshop - 10 June Geneva - Preventing harmful interference to satellite systems Nicolas Dubyk Agenda 2 1- Why Geolocate? 2- Geolocation principle
83230349-DOC-TAS-FR-001 Ground Geolocation Challenges Workshop - 10 June Geneva - Preventing harmful interference to satellite systems Nicolas Dubyk Agenda 2 1- Why Geolocate? 2- Geolocation principle
Plan. Quelles sont les conditions à remplir pour une approche ebusiness? Définition. Les domaines pouvant être touchés par l ebusiness
 Plan Quelles sont les conditions à remplir pour une approche ebusiness? SPI+ 1 Définition Objectifs de Quelques prévisions : 1. L orientation stratégique 2. L orientation client 3. Renforcer l efficacité
Plan Quelles sont les conditions à remplir pour une approche ebusiness? SPI+ 1 Définition Objectifs de Quelques prévisions : 1. L orientation stratégique 2. L orientation client 3. Renforcer l efficacité
Génération de code binaire pour application multimedia : une approche au vol
 Génération de binaire pour application multimedia : une approche au vol http://hpbcg.org/ Henri-Pierre Charles Université de Versailles Saint-Quentin en Yvelines 3 Octobre 2009 Présentation Présentation
Génération de binaire pour application multimedia : une approche au vol http://hpbcg.org/ Henri-Pierre Charles Université de Versailles Saint-Quentin en Yvelines 3 Octobre 2009 Présentation Présentation
Activité 1 : Rayonnements et absorption par l'atmosphère - Correction
 Activité 1 : Rayonnements et absorption par l'atmosphère - Correction Objectifs : Extraire et exploiter des informations sur l'absorption des rayonnements par l'atmosphère terrestre. Connaitre des sources
Activité 1 : Rayonnements et absorption par l'atmosphère - Correction Objectifs : Extraire et exploiter des informations sur l'absorption des rayonnements par l'atmosphère terrestre. Connaitre des sources
Mesure chimique. Chemical measurement. Sonde de température Pt 1000 Inox Pt 1000 stainless steel. Ref : 703 262. Français p 1.
 Mesure chimique Chemical measurement Français p 1 English p 3 Sonde de température Pt 1000 Inox Pt 1000 stainless steel Version : 6010 Mesure chimique Sonde de température Pt 1000 Inox 1 Description La
Mesure chimique Chemical measurement Français p 1 English p 3 Sonde de température Pt 1000 Inox Pt 1000 stainless steel Version : 6010 Mesure chimique Sonde de température Pt 1000 Inox 1 Description La
Differential Synchronization
 Differential Synchronization Neil Fraser Google 2009 BENA Pierrick CLEMENT Lucien DIARRA Thiemoko 2 Plan Introduction Stratégies de synchronisation Synchronisation différentielle Vue d ensemble Dual Shadow
Differential Synchronization Neil Fraser Google 2009 BENA Pierrick CLEMENT Lucien DIARRA Thiemoko 2 Plan Introduction Stratégies de synchronisation Synchronisation différentielle Vue d ensemble Dual Shadow
Exo-planètes, étoiles et galaxies : progrès de l'observation
 Collège de France Chaire d Astrophysique Observationnelle Exo-planètes, étoiles et galaxies : progrès de l'observation Cous à Paris les mardis de Janvier et Mars cours à Marseille le 20 Février, à Nice
Collège de France Chaire d Astrophysique Observationnelle Exo-planètes, étoiles et galaxies : progrès de l'observation Cous à Paris les mardis de Janvier et Mars cours à Marseille le 20 Février, à Nice
Produits concernés: CS10, CS15, TS11, TS15, GS05, GS06, GS08, GS10, GS15
 V3.50 Apports et bénéfices Produits concernés: CS10, CS15, TS11, TS15, GS05, GS06, GS08, GS10, GS15 Ce document contient d importantes informations au sujet de la version 3.50 de SmartWorx Viva et des
V3.50 Apports et bénéfices Produits concernés: CS10, CS15, TS11, TS15, GS05, GS06, GS08, GS10, GS15 Ce document contient d importantes informations au sujet de la version 3.50 de SmartWorx Viva et des
RAPID 3.34 - Prenez le contrôle sur vos données
 RAPID 3.34 - Prenez le contrôle sur vos données Parmi les fonctions les plus demandées par nos utilisateurs, la navigation au clavier et la possibilité de disposer de champs supplémentaires arrivent aux
RAPID 3.34 - Prenez le contrôle sur vos données Parmi les fonctions les plus demandées par nos utilisateurs, la navigation au clavier et la possibilité de disposer de champs supplémentaires arrivent aux
Application Form/ Formulaire de demande
 Application Form/ Formulaire de demande Ecosystem Approaches to Health: Summer Workshop and Field school Approches écosystémiques de la santé: Atelier intensif et stage d été Please submit your application
Application Form/ Formulaire de demande Ecosystem Approaches to Health: Summer Workshop and Field school Approches écosystémiques de la santé: Atelier intensif et stage d été Please submit your application
Post-processing of multimodel hydrological forecasts for the Baskatong catchment
 + Post-processing of multimodel hydrological forecasts for the Baskatong catchment Fabian Tito Arandia Martinez Marie-Amélie Boucher Jocelyn Gaudet Maria-Helena Ramos + Context n Master degree subject:
+ Post-processing of multimodel hydrological forecasts for the Baskatong catchment Fabian Tito Arandia Martinez Marie-Amélie Boucher Jocelyn Gaudet Maria-Helena Ramos + Context n Master degree subject:
Instructions Mozilla Thunderbird Page 1
 Instructions Mozilla Thunderbird Page 1 Instructions Mozilla Thunderbird Ce manuel est écrit pour les utilisateurs qui font déjà configurer un compte de courrier électronique dans Mozilla Thunderbird et
Instructions Mozilla Thunderbird Page 1 Instructions Mozilla Thunderbird Ce manuel est écrit pour les utilisateurs qui font déjà configurer un compte de courrier électronique dans Mozilla Thunderbird et
Introduction à l approche bootstrap
 Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Introduction à l approche bootstrap Irène Buvat U494 INSERM buvat@imedjussieufr 25 septembre 2000 Introduction à l approche bootstrap - Irène Buvat - 21/9/00-1 Plan du cours Qu est-ce que le bootstrap?
Exploitation de la micro-sismique pour le monitoring de la fracturation Etude de faisabilité
 المعهد الجزاي ري للبترول INSTITUT ALGERIEN DU PETROLE JOURNEES D ETUDES TIGHT & SHALE RESERVOIRS 17-18 Septembre 2013 Sheraton, Alger Exploitation de la micro-sismique pour le monitoring de la fracturation
المعهد الجزاي ري للبترول INSTITUT ALGERIEN DU PETROLE JOURNEES D ETUDES TIGHT & SHALE RESERVOIRS 17-18 Septembre 2013 Sheraton, Alger Exploitation de la micro-sismique pour le monitoring de la fracturation
G.P. DNS02 Septembre 2012. Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3. Réfraction
 DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
ADHEFILM : tronçonnage. ADHEFILM : cutting off. ADHECAL : fabrication. ADHECAL : manufacturing.
 LA MAÎTRISE D UN MÉTIER Depuis plus de 20 ans, ADHETEC construit sa réputation sur la qualité de ses films adhésifs. Par la maîtrise de notre métier, nous apportons à vos applications la force d une offre
LA MAÎTRISE D UN MÉTIER Depuis plus de 20 ans, ADHETEC construit sa réputation sur la qualité de ses films adhésifs. Par la maîtrise de notre métier, nous apportons à vos applications la force d une offre
TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE
 TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE Exercice en classe EXERCICE 1 : La fibre à gradient d indice On considère la propagation d une onde électromagnétique dans un milieu diélectrique
TD1 PROPAGATION DANS UN MILIEU PRESENTANT UN GRADIENT D'INDICE Exercice en classe EXERCICE 1 : La fibre à gradient d indice On considère la propagation d une onde électromagnétique dans un milieu diélectrique
OLP-55 Smart Optical Power Meter Un mesureur de puissance optique évolutif de la gamme Smart
 COMMUNICATIONS TEST & MEASUREMENT SOLUTIONS OLP-55 Smart Optical Power Meter Un mesureur de puissance optique évolutif de la gamme Smart Key features Nouveau Nouveau Première fonction de compensation automatique
COMMUNICATIONS TEST & MEASUREMENT SOLUTIONS OLP-55 Smart Optical Power Meter Un mesureur de puissance optique évolutif de la gamme Smart Key features Nouveau Nouveau Première fonction de compensation automatique