Notions de métrologie et MMT. I. Introduction à la métrologie. A. Définitions
|
|
|
- François Roger Rochette
- il y a 10 ans
- Total affichages :
Transcription
1 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 1 sur 20 I. Introduction à la métrologie A. Définitions 1- Métrologie : C est le domaine des connaissances relatives au mesurage. Il englobe tous les aspects aussi bien théoriques que pratiques quel que soit la nature de la science et de la technologie développée. 2- Mesurage : C est l ensemble des opérations permettant d attribuer une valeur à la grandeur mesurée. 3- Grandeur mesurable : C est une caractéristique d un phénomène, d un corps ou d une substance, qui est susceptible d être distinguée qualitativement par un nom (en métrologie dimensionnelle : Distance, Angle..) et déterminée qualitativement par une valeur (nombre exprimé dans l unité choisie). 4- Méthode de mesure : C est une succession logique d opérations décrites d une manière succincte permettant la mise en œuvre du mesurage Méthode directe : C est le relevé d une dimension à partir d une référence. La précision et la grandeur de la dimension influent sur le choix de la référence Méthode indirecte : C est le relevé à l aide d un capteur de l écart entre une pièce à mesurer et un étalon (pièce de référence). 5- Dimension : C est la distance la plus courte entre deux points réels ou fictifs (Exp. : Un diamètre, un entraxe). 6- Mesurande : C est la grandeur particulière soumise au mesurage (Exp. : Température, Pression, Dimension ) 7- Résultat de mesurage : C est la valeur attribuée à la grandeur (au mesurande) obtenue par mesurage. Une expression complète doit contenir la valeur et une information sur l incertitude. 8- Contrôle dimensionnel : C est l ensemble des opérations permettant de déterminer si la valeur d une grandeur se trouve bien entre les limites de tolérance qui lui sont imposées. On distingue deux types de contrôle : 8-1. le contrôle par attribut: Il est limité à une simple vérification de conformité (réponse par oui ou non, pas de mesurage). Applications : calibres fixes, montages de contrôle, plaquettes visio-tactiles.

2 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 2 sur le contrôle par mesurage: Où l on procède d abord à un ou plusieurs mesurages pour quantifier les grandeurs et ensuite à une comparaison des valeurs mesurées avec les spécifications demandées. Pour palier à ce problème, la norme ISO préconise de déduire de la spécification l incertitude de mesure. B. Classification des instruments de mesure 1. Vérificateurs à dimensions variables Il y a les instruments de mesure directe.

3 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 3 sur 20 On trouve aussi des éléments de mesure indirecte comme les comparateurs.

4 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 4 sur Vérificateurs à dimensions fixes II. Vérification de spécifications par métrologie conventionnelle

5 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 5 sur 20

6 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 6 sur 20

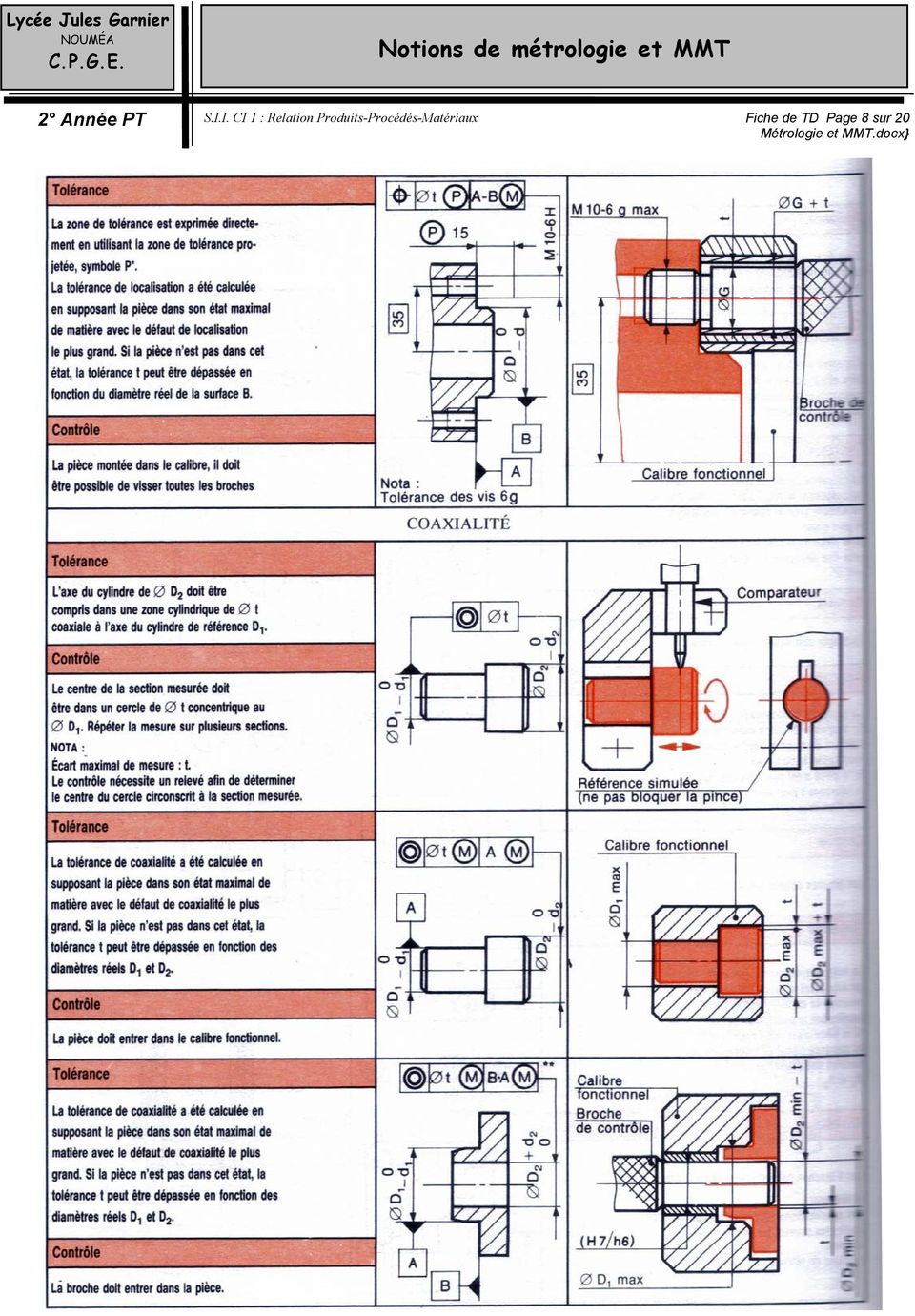
7 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 7 sur 20

8 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 8 sur 20
9 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 9 sur 20

10 III. 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 10 sur 20 Utilisation de Machines à Mesurer Tridimensionnelles (MMT) A. Aperçue historique Les machines à mesurer tridimensionnelles (MMT) sont nées au début des années soixante et se sont vraiment développées après l invention du palpeur à déclenchement en Les principaux concepts qui régissent la mise en œuvre et l exploitation de ces machines sont en place depuis le début des années quatre-vingt. B. Principe général Une MMT est une machine à saisir et traiter de l information. Un palpeur se déplace (manuellement, de manière motorisée ou automatiquement sur les MMT à commande numérique) grâce à trois glissières (parfaites pas de jeu, pas de frottements) de directions orthogonales et vient au contact des surfaces réelles. Lors de chaque accostage, le calculateur mémorise les coordonnées X, Y et Y du centre de la sphère de palpage (dans le cas fréquent où le palpeur se termine par une petite sphère). Les points palpés permettent de déterminer une image de la surface réelle. A partir des coordonnées saisies, le logiciel de traitement des données va effectuer des opérations mathématiques visant à rechercher les valeurs des dimensions ou des spécifications que l on cherche à connaître ou à contrôler. Ce traitement mathématique tend à se rapprocher de plus en plus des exigences des normes sans toujours les respecter totalement 1. Une MMT est constituée de 4 sous-ensembles distincts : La structure de déplacement, Le système de palpage, Le système électronique, Le système informatique et le pupitre de commande. 1 La norme parle de plan tangent extérieur matière minimisant les écarts maximum et les mathématiques permettent actuellement de faire des plans associés avec des critères de type moindres carrés

11 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 11 sur 20 C. Architecture des Machines à Mesurer Tridimensionnelles Les architectures les plus fréquemment utilisés sont : La structure potence : assez bien adaptée aux grands volumes. Elle permet d accéder à toutes les faces de la pièce mais la flexion du bras lui donne une précision limitée. La structure cantilever : Particulièrement adaptée aux petites capacités de mesure, elle permet un bon accès à la pièce. La structure portique : c est de loin la plus répandue. Elle permet de traiter de grands volumes et d accéder aisément aux surfaces. D. Mode de fonctionnement d une MMT Une MMT matérialise un repère orthonormé à 3 dimensions,,,. Pour chaque point palpé, on recueille les coordonnées du centre du palpeur : La pièce à mesurer est ensuite modélisée à l'aide des éléments géométriques définis par le préparateur (points, droites, plans, cercles, cylindres, cônes et sphères). A partir du nuage de points palpés, un traitement suivant la règle des moindres carrés permet de définir quantitativement les éléments géométriques. Pour définir un élément géométrique sur une MMT, le logiciel demande de palper le nombre de points minimum+1, soit par exemple 4 points à palper pour définir un plan. Si l'on s'en tenait au nombre minimum de points (3), le calcul d'optimisation suivant la méthode des moindres carrés, ainsi que le calcul du défaut de forme serait impossible. E. Dispositif de palpage Le dispositif de palpage le plus utilisé dans les MMT est le système de palpeur Renishaw, c est un palpeur dynamique à déclenchement. Il est construit sur le principe de la liaison isostatique de Boys.

12 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 12 sur 20 On parle de tête de palpage dynamique : au moment du contact entre le palpeur et la surface palpée, se produit dans la tête une rupture de contact électrique qui déclenche l ordre de lecture de la position de la sphère située à l extrémité du palpeur (en coordonnées X, Y, Z). Les 6 points de contact sont montés en série électriquement et traversés en permanence par un courant faible. Lorsque la bille vient au contact de la pièce, le solide touche+tripode passe d'une situation isostatique à une situation hyperstatique. Un des 6 points tend à décoller et la résistance électrique du palpeur varie alors fortement. A partir de cette variation importante et brutale de la résistance, une électronique de traitement génère un signal de commutation qui permettra d'actionner la lecture des règles de mesure des axes X,Y et Z. Pour assurer un bon contact sur les points d'appuis et pour éviter que le palpeur ne déclenche sous l'effet des accélérations nécessaires pour déplacer la MMT, un ressort tarable exerce un effort réglable au centre de l'étoile. Le ressort va provoquer un retard au déclenchement qui varie avec la géométrie des touches et le tarage. Néanmoins la remise en position de l'étoile après un mouvement est meilleure que 0,1 micron. Les têtes de palpage peuvent être plus ou moins complexes et motorisées, tout cela dans l intérêt évident d atteindre le maximum de surfaces sur la pièce à vérifier à partir d un unique posage. F. Étalonnage des palpeurs Si la mesure complète d'une pièce nécessite l'utilisation de plusieurs stylets pour accéder à toutes les surfaces, il faut être capable de corriger le rayon de la bille de chaque palpeur. L étalonnage a donc pour but de connaître le diamètre de la bille pour chacun des palpeurs et dans les différentes orientations des stylets. Pour être capable d'exprimer des relations géométriques entre les surfaces mesurées avec différents palpeurs, ces surfaces doivent être exprimées dans le même repère, celui de la sphère étalon. Il existe donc un repère machine, associé à la position des capteurs utilisés pour les POM à la mise sous tension de la machine, un repère sphère étalon dont l origine est le centre de la sphère étalon (obtenu après étalonnage) et un repère pièce qui sera défini dans la gamme de mesurage 2. Pour diminuer l'influence de la flexion du stylet et du retard au déclenchement du palpeur, on détermine le diamètre fictif de la bille fb du stylet en mesurant en 5 points une sphère étalon dont le diamètre De est connu par rattachement à la chaine d'étalonnage. Le diamètre mesuré en 5 points passant par les 5 centres bille vaut Dm. A cause du retard au déclenchement, le système calcule un diamètre fictif de la bille fb = f( De, Dm, Δα ) Δα étant l angle du stylet par rapport à la verticale. 2 Analogie totale avec la programmation sur MOCN, la méthode est la même, les capteurs sont identiques, seule la finalité change

13 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 13 sur 20 G. Principe de la mesure en coordonnées 1. Principe de base Afin d associer un élément à l élément géométrique réel, on peut utiliser plusieurs méthodes : La méthode de l enveloppe, c est celle qui est développé dans les Normes associées au concept GPS, difficile à mettre en œuvre mathématiquement (pas d algorithme simple permettant d associer cet élément au réel), La méthode des moindres carrés, c est celle qui est utilisée par la plupart des MMT, elle nécessite le palpage de N points +1, avec N le nombre de points minimum pour définir l élément géométrique parfait (2 pour une droite), elle n est pas en accord avec le concept GPS. 2. Calcul des points mesurés Le point de contact stylet-pièce étant inconnu au moment de la mesure d'un point, on lui substitue le relevé de trois informations : les coordonnées du centre de la bille du stylet (point saisi), le sens d'accostage et le rayon du palpeur. Ces informations permettent d'estimer par calcul le point de contact stylet-pièce. Pour cela on fait l'hypothèse que le point de contact recherché est à l'intersection de la sphère du stylet et de la normale à la surface passant par le point saisi. Les coordonnées des points saisis sont exprimées dans un même repère défini par l opération détalonnage.
, elle n est pas en accord avec le concept")
14 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 14 sur 20 La nature de la surface nominale étant connue le calcul du point mesuré peut-être le suivant : 1. association d'une surface nominale passant au mieux des points saisis (suivant le critère des moindres carrés), 2. calcul de la normale à la surface nominale, passant par le point saisi et orientée vers l'extérieur de la matière (sens d'accostage), 3. calcul des coordonnées du point mesuré Mi (ou point de contact estimé) données par la relation vectorielle : avec r : rayon de la sphère du stylet du palpeur Dans le cas ou la surface nominale est de nature inconnue, la normale à la surface peut être fixée arbitrairement ou être estimée localement. Dans ce dernier cas, deux points supplémentaires proches du point saisi sont mesurés, la normale est alors définie par le plan passant par les trois points. 3. Constitution de la base de données des éléments géométriques réels(associés et mesurés) Les éléments géométriques réels sont identifiés numériquement par des points mesurés sur les surfaces, et par des éléments idéaux associés aux points mesurés (suivant le critère des moindres carrés). L information géométrique est constituée dans une base de données par les trois éléments géométriques de base : le point, la droite et le plan. Ils sont définis par les coordonnées d un point et dans le cas d une droite ou d'un plan par les composantes d un vecteur unitaire : H. Gamme de mesure sur MMT Comme pour le cas de l usinage d une pièce mécanique, le contrôle dimensionnel d une pièce nécessite la création préalable d une gamme de mesurage. L ensemble de cette gamme est basée sur l étude du dessin de définition de la pièce à mesurer : 1. A partir de la forme de la pièce et de la cotation à vérifier, choisir une mise en position isostatique de la pièce à contrôler sur le marbre de la machine (penser à accéder aux différentes surfaces de manière aisée avec le palpeur). 2. Choisir le type de palpeur, l orientation de ce ou ces palpeurs pour accéder aux différentes surfaces à palper. 3. Mettre la machine sous tension et effectuer les POM (mise en place du repère machine). 4. Étalonner les différents palpeurs sur la sphère d étalonnage (mise en place du repère sphère étalon pour chacun des stylets et détermination du rayon de la bille). 5. Dégauchissage : association à la pièce mesurée d un ou plusieurs repères pièce selon les nécessités. Le dégauchissage est indispensable pour effectuer des mesures car la qualité d une pièce ne peut être jugée qu après la saisie exacte et la mise en mémoire de sa position. Un repère pièce est défini par une direction primaire (normale à un plan palpé, axe d un cylindre palpé, droite palpée ou construite), une direction secondaire (droite palpée ou construit, axe d un cylindre) 3 et une origine (palpé ou construit). 6. La mesure commence alors réellement, on palpe les différents éléments géométriques nécessaires à la vérification des tolérances géométriques, on construit aussi les différents éléments idéaux. 7. On peut alors vérifier que les éléments «réels» sont bien compris dans la zone de tolérance. 3 Il n y a pas de troisième direction à palper car elle est obtenue par construction pour avoir un repère orthonormé direct.
 données par la relation vectorielle : avec r : rayon de la sphère du stylet du palpeur Dans le cas ou la surface nominale est de")
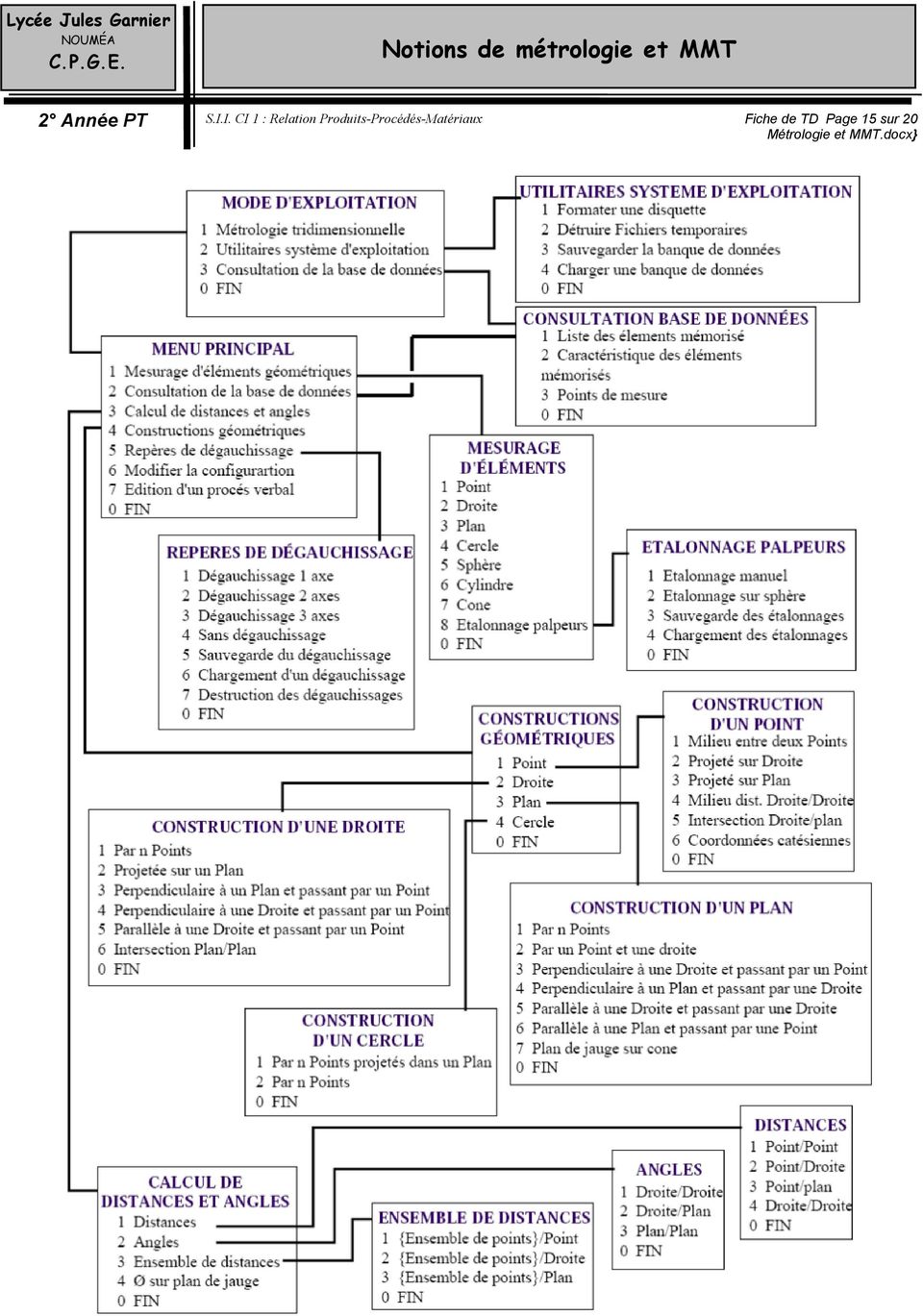
15 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 15 sur 20
16 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 16 sur 20 I. Exemple de gamme de mesure sur MMT On s intéressera au cas simple défini par le dessin de définition ci-dessous. 1. Inventaire des lignes et des surfaces réelles concernées par les spécifications, mesure et constitution de la base de données des éléments mesurés Quatre surfaces sont concernées par cinq spécifications, trois des surfaces seront modélisées par des plans et la quatrième par un cylindre. Gamme de mesurage : 1. Montage du palpeur 1, puis étalonnage du palpeur en diamètre et en position par mesure de la sphère de référence. Le palpeur est choisi suffisamment long pour atteindre tout point des plans PL1 et PL2, son orientation est sensiblement parallèle aux plans PL1 et PL2. 2. Palpage en 5 points de la surface réputée plane PL1. 3. Palpage en 5 points de la surface réputée plane PL2. 4. Palpage en 5 points de la surface réputée plane PL3. 5. Montage du palpeur 2, puis étalonnage du palpeur en diamètre et en position par mesure de la sphère de référence. Le palpeur est choisi suffisamment long pour atteindre tout point de l'alésage, son orientation est sensiblement parallèle à l'axe de l'alésage. 6. Palpage en 8 points de l'alésage CY4.

17 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 17 sur 20 Base de données des éléments mesurés : Plan mesuré {PL_1} (ensemble des coordonnées des points mesurés) Plan associé PL_1 (plan des moindres carrés : coordonnées d'un point du plan, cosinus directeurs de la normale au plan) Plan mesuré {PL_2} (ensemble des coordonnées des points mesurés) Plan associé PL_2 (plan des moindres carrés : coordonnées d'un point du plan, cosinus directeurs de la normale au plan) Plan mesuré {PL_3} (ensemble des coordonnées des points mesurés) Plan associé PL_3 (plan des moindres carrés : coordonnées d'un point du plan, cosinus directeurs de la normale au plan) Cylindre mesuré {CY_4} (ensemble des coordonnées des points mesurés) Cylindre associé CY_4 (cylindre des moindres carrés : coordonnées d'un point de l'axe, cosinus directeurs de l'axe) 2. Vérification de la tolérance de planéité Définition générale : ISO 1101 (NF E ) La planéité d'un élément tolérancé isolé est jugée conforme à la spécification lorsque la distance de chacun de ses points à la surface géométrique idéale, en contact avec elle, est inférieure à la valeur de la tolérance spécifiée. L'orientation de la surface géométrique idéale doit être choisie de façon que la distance du point le plus éloigné à cette surface géométriquement idéale soit minimale. Définition de la zone de tolérance : La zone de tolérance est limitée par deux plans parallèles distants de 0,05. Interprétation et vérification de la planéité Compte tenu des éléments disponibles dans la base de données, et des calculs proposés par le logiciel, la surface géométrique idéale est ici le plan associé PL_1 calculé par le logiciel suivant le critère des moindres carrés. En effectuant le calcul "Ensemble de distances" entre la surface mesurée {PL1} et le plan associé PL1, on obtient l'étendue des distances qui représente une valeur majorante de la planéité pour les cinq points mesurés. Listing du calcul proposé ENSEMBLE DE DISTANCES {PL_1}/PL_1 MAXI 0,028 MINI -0,013 ÉTENDUE 0,041 L'étendue calculée (0,041) étant inférieure à la tolérance de planéité imposée (0,05), la direction du plan des moindres carrés est dans ce cas satisfaisante, dans le cas contraire si la spécification n'avait pas été respectée, la pièce aurait été déclarée hors tolérance sans en être vraiment sûr. En effet il existe très certainement une autre direction donnant une étendue plus petite, cette direction serait celle d'un plan associé suivant le critère du minimax (défaut de forme mini), critère que les logiciels de mesure tridimensionnelle ne possèdent pas. 3. Vérification de la tolérance de parallélisme Définition de la zone de tolérance : ISO 1101 (NF E de novembre 1983). La zone de tolérance est limitée par deux plans parallèles distants de 0,2 et parallèles au plan de référence A. La surface tolérancée doit être comprise dans la zone de tolérance. Définition du plan de référence Le plan de référence est tangent du coté libre de la matière, et minimise la plus grand des écarts avec la surface réelle. Interprétation et vérification de la tolérance de parallélisme Compte tenu des éléments disponibles dans la base de données, et des calculs proposés par le logiciel, le plan de référence ne peut-être ici qu'aproximé par le plan associé PL_1 calculé par le logiciel suivant le critère des moindres carrés. En effectuant le calcul "Ensemble de distances" entre la surface mesurée {PL2} et le plan associé PL1, on obtient l'étendue des distances qui représente une valeur proche mais non majorante du défaut de parallélisme. Le résultat ne sera qu'une approximation de la valeur recherchée, une spécification ne pourra donc être déclarée dans la zone de tolérance que si la valeur trouvée est nettement inférieure à la tolérance imposée.
 Plan mesuré {PL_3} (ensemble des coordonnées des points mesurés) Plan associé PL_3 (plan des moindres")
18 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 18 sur 20 listing du calcul proposé ENSEMBLE DE DISTANCES {PL_2}/PL_1 MAXI 65,294 MINI 65,087 ETENDUE 0,207 L'étendue trouvée est supérieure de 7μm à la tolérance spécifiée, le calcul brut donne donc une pièce hors tolérance. 4. Vérification de la cote Définitions ISO 8015 : Entité dimensionnelle : deux surfaces planes parallèles distantes de b Enveloppe de forme parfaite : Enveloppe théorique, de forme parfaite, de l'entité dimensionnelle. Elle est formée de deux plans limites définies par la dimension maximale (ici 65,5) Dimension locale : distance entre deux points d'une entité dimensionnelle dans toute section normale. Exigence de l'enveloppe : cette exigence est basée sur la dépendance entre la forme d'une entité dimensionnelle et sa dimension locale. En conséquence, l'enveloppe de forme parfaite d'une entité dimensionnelle ne doit pas être dépassée. Interprétation et vérification a) exigence de l'enveloppe On prend comme direction générale des deux plans parallèles le plan associé PL_1 (plan des moindres carrés avec un écart maxi Emax1 = 0,028 et un écart mini Emin1 = - 0,013, écarts définis par le calcul ensemble de distances {PL_1}/PL_1) listing du calcul proposé ENSEMBLE DE DISTANCES {PL_2}/PL_1 MAXI 65,294 MINI 65,087 ETENDUE 0,207 La distance entre les deux plans enveloppes des deux plans mesurés est donc : 65,294 + écart maxi de PL_1 soit 65, ,028 = 65,322 cette distance étant inférieure à 65,5 l'exigence de l'enveloppe est respectée. Dans le cas contraire, le calcul peut être refait en prenant le plan associé PL_2 comme nouvelle direction générale des deux plans parallèles. On remarque ici qu'il serait intéressant de posséder un calcul d'optimisation permettant de chercher directement deux plans parallèles tangents du coté libre de la matière et répondant au critère d'une distance minimale entre les deux plans, mais ce calcul n'existe pas dans les logiciels industriels de mesure tridimensionnelle et l'on prend comme direction l'un des deux plans associés PL1 ou PL2. b) les dimensions locales doivent avoir des valeurs supérieures à 65mm. Les points mesurés sur chaque surface ne sont pas directement opposés et ne constituent pas des dimensions locales, on vérifie alors qu'il n'existe aucune possibilité d'avoir une dimension locale inférieure à 65 en vérifiant que tous les points sont à l'extérieur de deux plans parallèles distant de 65mm. En prenant PL_1 comme direction des deux plans parallèles, le calcul ensemble de distances {PL_2}/PL_1 permet de vérifier que : listing du calcul proposé ENSEMBLE DE DISTANCES {PL_2}/PL_1 MAXI 65,294 MINI 65,087 ETENDUE 0,207 tout bipoint (formé avec un point mesuré appartenant au plan 1) aura une dimension locale supérieure à 65,087 + écart mini du plan PL_1 soit 65,087-0,013 = 65,074

19 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 19 sur 20 Dans le cas où l'une des vérifications donnerait un résultat hors tolérance, il est possible de prendre le plan PL_2 comme nouvelle direction générale et de vérifier si cette direction n'est pas plus favorable. 5. Vérification de la tolérance de localisation Système de référence : Il est constitué de 2 plans perpendiculaires A et B. Le plan A est associé à la surface (réelle) de référence A tangente du côté libre de la matière et minimisant l'écart maxi. Le plan B perpendiculaire au plan A est tangent du coté libre de la matière à la surface (réelle) de référence B. Zone de tolérance : cylindre de diamètre 0,2 mm situé dans le système de référence à 32 mm des deux plans parfaits A et B. Interprétation et vérification Modélisation de l'élément tolérancé, ici l'axe réel de l'alésage. Compte tenu des possibilités de calcul du logiciel, on prendra l'axe du cylindre des moindres carrés CY_4 limité par les deux points d'intersection de l'axe avec les deux plans PL_5 et PL_6 qui seront mesurés par le palpeur 1. Suite de la gamme de mesurage et de traitement : 7. Palpage du plan PL_5 8. Palpage du plan PL_6 9. construction du point PT_7 intersection de l'axe du cylindre CY_4 et du plan PL_5 10. construction du point PT_8 intersection de l'axe du cylindre CY_4 et du plan PL_6 Construction du système de référence : compte tenu des possibilités de calcul du logiciel, le système de référence sera constitué de 2 plans perpendiculaires A et B : le plan A sera le plan des moindres carrés le plan B sera le plan perpendiculaire à A et passant par la droite d'intersection des deux plans A et B Suite de la gamme de mesurage et de traitement : 11. construction de la droite DR_9, intersection entre les plans PL_1 et PL_3 12. construction du plan PL_10 passant par la droite DR_9 et perpendiculaire au plan PL_1

20 2 Année PT S.I.I. CI 1 : Relation Produits-Procédés-Matériaux Fiche de TD Page 20 sur 20 Définition de la zone de tolérance : Elle sera définie par une droite distante de 32mm des deux plans PL_1 et PL_10 du système de référence. Compte tenu des possibilités de calculs du logiciel, on construit un repère dans lequel sera construit l'axe de la zone de tolérance. Le repère sera défini par les éléments géométriques suivants : 1ère direction (axe y) : le plan PL_1 2ème direction (axe x) : le plan PL_10 la 3ème direction (axe z) est automatiquement prise perpendiculaire aux deux premières origine le point PT_11 intersection de la droite DR_9 et du plan PL_5 le sens des axes sera donné par un point défini dans le secteur positif des axes, par exemple le point PT_13 (intersection des 3 plans PL_2, PL_3, PL_6) obtenu par intersection de la droite DR_12 (intersection des deux plans PL_2 et PL_3) avec le plan PL_6. L'axe de la zone de tolérance sera défini par deux points PT_14 et PT_15 eux-mêmes définis par leurs coordonnées dans le repère. Suite de la gamme de mesurage et de traitement : 13. construction du point PT_11 intersection de la droite DR_9 et du plan PL_5 14. construction de la droite DR_12 intersection des deux plans PL_2 et PL_3 15. construction du point PT_13 intersection de la droite DR_12 et du plan PL_6 16. construction d'un repère R1: 1ère direction axe y : PL_1 2ème direction axe x : PL_10 origine PT_11 secteur positif donné par le point PT_ dans le repère R1 construction d'un point PT_14 de coordonnées 32 mm, 32 mm, 0 mm d'un point PT_15 de coordonnées 32 mm, 32 mm, 100 mm 18. construction d'une droite DR_15 passant par les points PT_14 et PT_15 Vérification de la tolérance de positionnement : Elle sera obtenue par le calcul des distances des 2 points PT_7 et PT_8 à la droite DR_15, distances qui devront rester inférieures au rayon de la zone de tolérance, ici 0,1 mm. listing du calcul proposé DISTANCE PT_7/DR_15 0,050 DISTANCE PT_8/DR_15 0,108 Une des distances est supérieure de 0,008 de l'écart maxi souhaité, le contrôle conclu que compte tenu des calculs mis à la disposition de l'opérateur, la spécification ne peut pas être déclarée bonne.
 : le plan PL_1 2ème direction (axe x) : le plan PL_10 la 3ème direction (axe z) est automatiquement prise")
AUTRES ASPECTS DU GPS. Partie I : tolérance de Battement Partie II : tolérancement par frontières
 AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
AUTRES ASPECTS DU GPS Partie I : tolérance de Battement Partie II : tolérancement par frontières 1 Partie I Tolérance de battement Défaut de Battement Défautconjuguéde forme, orientation et position, constatélorsde
C - ICM LTE Gamme DE
 Gamme DELTEC - ICM ICM micro Projecteur de profil numérique 2D Système de mesure 2D, fruit de plus de 25 ans d expérience dans la métrologie par vision! Déposer c est mesurer! - Reconnaissance de la pièce
Gamme DELTEC - ICM ICM micro Projecteur de profil numérique 2D Système de mesure 2D, fruit de plus de 25 ans d expérience dans la métrologie par vision! Déposer c est mesurer! - Reconnaissance de la pièce
CAPTEURS - CHAINES DE MESURES
 CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
CAPTEURS - CHAINES DE MESURES Pierre BONNET Pierre Bonnet Master GSI - Capteurs Chaînes de Mesures 1 Plan du Cours Propriétés générales des capteurs Notion de mesure Notion de capteur: principes, classes,
PC-DMIS NC. 3D Form Inspect. PC-DMIS NC Gage
 Mesurer dans la machine-outil Solutions logicielles de mesure Contrôle sur machine suivi du processus Solutions logicielles évolutives En tant que leader technologique du palpage et du contrôle outils
Mesurer dans la machine-outil Solutions logicielles de mesure Contrôle sur machine suivi du processus Solutions logicielles évolutives En tant que leader technologique du palpage et du contrôle outils
Vision industrielle et télédétection - Détection d ellipses. Guillaume Martinez 17 décembre 2007
 Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
Vision industrielle et télédétection - Détection d ellipses Guillaume Martinez 17 décembre 2007 1 Table des matières 1 Le projet 3 1.1 Objectif................................ 3 1.2 Les choix techniques.........................
INTRODUCTION. A- Modélisation et paramétrage : CHAPITRE I : MODÉLISATION. I. Paramétrage de la position d un solide : (S1) O O1 X
 O O1 X") INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
INTRODUCTION La conception d'un mécanisme en vue de sa réalisation industrielle comporte plusieurs étapes. Avant d'aboutir à la maquette numérique du produit définitif, il est nécessaire d'effectuer une
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Deux disques dans un carré
 Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Deux disques dans un carré Table des matières 1 Fiche résumé 2 2 Fiche élève Seconde - version 1 3 2.1 Le problème............................................... 3 2.2 Construction de la figure avec geogebra...............................
Evaluation de la variabilité d'un système de mesure
 Evaluation de la variabilité d'un système de mesure Exemple 1: Diamètres des injecteurs de carburant Problème Un fabricant d'injecteurs de carburant installe un nouveau système de mesure numérique. Les
Evaluation de la variabilité d'un système de mesure Exemple 1: Diamètres des injecteurs de carburant Problème Un fabricant d'injecteurs de carburant installe un nouveau système de mesure numérique. Les
Problèmes sur le chapitre 5
 Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Problèmes sur le chapitre 5 (Version du 13 janvier 2015 (10h38)) 501 Le calcul des réactions d appui dans les problèmes schématisés ci-dessous est-il possible par les équations de la statique Si oui, écrire
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN
 Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN Table des matières. Introduction....3 Mesures et incertitudes en sciences physiques
Nombres, mesures et incertitudes en sciences physiques et chimiques. Groupe des Sciences physiques et chimiques de l IGEN Table des matières. Introduction....3 Mesures et incertitudes en sciences physiques
Cours de Mécanique du point matériel
 Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Cours de Mécanique du point matériel SMPC1 Module 1 : Mécanique 1 Session : Automne 2014 Prof. M. EL BAZ Cours de Mécanique du Point matériel Chapitre 1 : Complément Mathématique SMPC1 Chapitre 1: Rappels
Nom : Groupe : Date : 1. Quels sont les deux types de dessins les plus utilisés en technologie?
 Nom : Groupe : Date : Verdict Chapitre 11 1 La communication graphique Pages 336 et 337 1. Quels sont les deux types de dessins les plus utilisés en technologie? Les dessins de fabrication. Les schémas.
Nom : Groupe : Date : Verdict Chapitre 11 1 La communication graphique Pages 336 et 337 1. Quels sont les deux types de dessins les plus utilisés en technologie? Les dessins de fabrication. Les schémas.
Vis à billes de précision à filets rectifiés
 sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
sommaire Calculs : - Capacités de charges / Durée de vie - Vitesse et charges moyennes 26 - Rendement / Puissance motrice - Vitesse critique / Flambage 27 - Précharge / Rigidité 28 Exemples de calcul 29
LA PHYSIQUE DES MATERIAUX. Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE
 LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
LA PHYSIQUE DES MATERIAUX Chapitre 1 LES RESEAUX DIRECT ET RECIPROQUE Pr. A. Belayachi Université Mohammed V Agdal Faculté des Sciences Rabat Département de Physique - L.P.M [email protected] 1 1.Le réseau
Fonctions de plusieurs variables
 Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
Module : Analyse 03 Chapitre 00 : Fonctions de plusieurs variables Généralités et Rappels des notions topologiques dans : Qu est- ce que?: Mathématiquement, n étant un entier non nul, on définit comme
SOMMAIRE. B5.1 Première approche
 APPROCHE THEORIQE LES COMPOSANTS ELECTRONIQES B5 LES IOES SOMMAIRE B5.1 Première approche B5.2 e la jonction PN à la diode B5.3 Caractéristique d'une diode B5.4 Mécanisme de conduction d'une diode B5.5
APPROCHE THEORIQE LES COMPOSANTS ELECTRONIQES B5 LES IOES SOMMAIRE B5.1 Première approche B5.2 e la jonction PN à la diode B5.3 Caractéristique d'une diode B5.4 Mécanisme de conduction d'une diode B5.5
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
DISQUE DUR. Figure 1 Disque dur ouvert
 DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
DISQUE DUR Le sujet est composé de 8 pages et d une feuille format A3 de dessins de détails, la réponse à toutes les questions sera rédigée sur les feuilles de réponses jointes au sujet. Toutes les questions
MOTO ELECTRIQUE. CPGE / Sciences Industrielles pour l Ingénieur TD06_08 Moto électrique DIAGRAMME DES INTER-ACTEURS UTILISATEUR ENVIRONNEMENT HUMAIN
 MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
MOTO ELECTRIQUE MISE EN SITUATION La moto électrique STRADA EVO 1 est fabriquée par une société SUISSE, située à LUGANO. Moyen de transport alternatif, peut-être la solution pour concilier contraintes
TP Détection d intrusion Sommaire
 TP Détection d intrusion Sommaire Détection d intrusion : fiche professeur... 2 Capteur à infra-rouge et chaîne de mesure... 4 Correction... 14 1 Détection d intrusion : fiche professeur L'activité proposée
TP Détection d intrusion Sommaire Détection d intrusion : fiche professeur... 2 Capteur à infra-rouge et chaîne de mesure... 4 Correction... 14 1 Détection d intrusion : fiche professeur L'activité proposée
Chapitre 1 Cinématique du point matériel
 Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Chapitre 1 Cinématique du point matériel 7 1.1. Introduction 1.1.1. Domaine d étude Le programme de mécanique de math sup se limite à l étude de la mécanique classique. Sont exclus : la relativité et la
Les mesures à l'inclinomètre
 NOTES TECHNIQUES Les mesures à l'inclinomètre Gérard BIGOT Secrétaire de la commission de Normalisation sols : reconnaissance et essais (CNSRE) Laboratoire régional des Ponts et Chaussées de l'est parisien
NOTES TECHNIQUES Les mesures à l'inclinomètre Gérard BIGOT Secrétaire de la commission de Normalisation sols : reconnaissance et essais (CNSRE) Laboratoire régional des Ponts et Chaussées de l'est parisien
MESURE ET PRECISION. Il est clair que si le voltmètre mesure bien la tension U aux bornes de R, l ampèremètre, lui, mesure. R mes. mes. .
 MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
MESURE ET PRECISIO La détermination de la valeur d une grandeur G à partir des mesures expérimentales de grandeurs a et b dont elle dépend n a vraiment de sens que si elle est accompagnée de la précision
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures)
") Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Bac Blanc Terminale ES - Février 2011 Épreuve de Mathématiques (durée 3 heures) Eercice 1 (5 points) pour les candidats n ayant pas choisi la spécialité MATH Le tableau suivant donne l évolution du chiffre
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Plan du cours : électricité 1
 Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Semestre : S2 Module Physique II 1 Electricité 1 2 Optique géométrique Plan du cours : électricité 1 Partie A : Electrostatique (discipline de l étude des phénomènes liés aux distributions de charges stationnaires)
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques
 et structures mécaniques") Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Banc d études des structures Etude de résistances de matériaux (RDM) et structures mécaniques Descriptif du support pédagogique Le banc d essais des structures permet de réaliser des essais et des études
Cours IV Mise en orbite
 Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
Introduction au vol spatial Cours IV Mise en orbite If you don t know where you re going, you ll probably end up somewhere else. Yogi Berra, NY Yankees catcher v1.2.8 by-sa Olivier Cleynen Introduction
«Aucune investigation humaine ne peut être qualifiée de science véritable si elle ne peut être démontrée mathématiquement.
 «Aucune investigation humaine ne peut être qualifiée de science véritable si elle ne peut être démontrée mathématiquement.» Léonard de Vinci MATHEMATIQUES Les mathématiques revêtaient un caractère particulier
«Aucune investigation humaine ne peut être qualifiée de science véritable si elle ne peut être démontrée mathématiquement.» Léonard de Vinci MATHEMATIQUES Les mathématiques revêtaient un caractère particulier
Bridages Renishaw Votre source unique de bridages pour la métrologie
 H-1000-0084-02-A Bridages Renishaw Votre source unique de bridages pour la métrologie Bridages pour MMT Bridages Vision Bridages Equator Bridages sur mesure Bridages Renishaw pour MMT Bridages modulaires
H-1000-0084-02-A Bridages Renishaw Votre source unique de bridages pour la métrologie Bridages pour MMT Bridages Vision Bridages Equator Bridages sur mesure Bridages Renishaw pour MMT Bridages modulaires
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
Sujet. calculatrice: autorisée durée: 4 heures
 DS SCIENCES PHYSIQUES MATHSPÉ calculatrice: autorisée durée: 4 heures Sujet Approche d'un projecteur de diapositives...2 I.Questions préliminaires...2 A.Lentille divergente...2 B.Lentille convergente et
DS SCIENCES PHYSIQUES MATHSPÉ calculatrice: autorisée durée: 4 heures Sujet Approche d'un projecteur de diapositives...2 I.Questions préliminaires...2 A.Lentille divergente...2 B.Lentille convergente et
Date : Note /20 : EVALUATION Nom : Prénom : Classe : Traitement sur mots
 Date : Note /20 : EVALUATION Nom : Prénom : Classe : Traitement sur mots API-1 Etre capable de : Sélectionner un format de mot adapté au type de donnée à traiter par un API. D interpréter les données contenues
Date : Note /20 : EVALUATION Nom : Prénom : Classe : Traitement sur mots API-1 Etre capable de : Sélectionner un format de mot adapté au type de donnée à traiter par un API. D interpréter les données contenues
OM 1 Outils mathématiques : fonction de plusieurs variables
 Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
Outils mathématiques : fonction de plusieurs variables PCSI 2013 2014 Certaines partie de ce chapitre ne seront utiles qu à partir de l année prochaine, mais une grande partie nous servira dès cette année.
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE
 TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
TUTORIAL 1 ETUDE D UN MODELE SIMPLIFIE DE PORTIQUE PLAN ARTICULE L'objectif de ce tutorial est de décrire les différentes étapes dans CASTOR Concept / FEM permettant d'effectuer l'analyse statique d'une
Centre de tournage. et de fraisage CNC TNX65/42
 Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
Centre de tournage et de fraisage CNC TNX65/42 Le tour TRAUB TNX65/42 pose de nouveaux jalons dans l'usinage à haute performance. Le concept de machine futuriste avec l'incomparable nouvelle unité de fraisage
ORIENTATIONS POUR LA CLASSE DE TROISIÈME
 51 Le B.O. N 1 du 13 Février 1997 - Hors Série - page 173 PROGRAMMES DU CYCLE CENTRAL 5 e ET 4 e TECHNOLOGIE En continuité avec le programme de la classe de sixième, celui du cycle central du collège est
51 Le B.O. N 1 du 13 Février 1997 - Hors Série - page 173 PROGRAMMES DU CYCLE CENTRAL 5 e ET 4 e TECHNOLOGIE En continuité avec le programme de la classe de sixième, celui du cycle central du collège est
Fonctions de deux variables. Mai 2011
 Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
Fonctions de deux variables Dédou Mai 2011 D une à deux variables Les fonctions modèlisent de l information dépendant d un paramètre. On a aussi besoin de modéliser de l information dépendant de plusieurs
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE
 LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
LES LOIS PHYSIQUES APPLIQUÉES AUX DEUX-ROUES : 1. LA FORCE DE GUIDAGE 2. L EFFET GYROSCOPIQUE Les lois physiques qui régissent le mouvement des véhicules terrestres sont des lois universelles qui s appliquent
1 Mise en application
 Université Paris 7 - Denis Diderot 2013-2014 TD : Corrigé TD1 - partie 2 1 Mise en application Exercice 1 corrigé Exercice 2 corrigé - Vibration d une goutte La fréquence de vibration d une goutte d eau
Université Paris 7 - Denis Diderot 2013-2014 TD : Corrigé TD1 - partie 2 1 Mise en application Exercice 1 corrigé Exercice 2 corrigé - Vibration d une goutte La fréquence de vibration d une goutte d eau
La C.A.O (Conception Assistée par Ordinateur). Le logiciel de C.A.O.
. Le logiciel de C.A.O.") CAO1 La C.A.O (Conception Assistée par Ordinateur). Aujourd'hui, lorsque des ingénieurs décident de concevoir un nouveau produit, ils n'utilisent plus de stylo. Les plans sont réalisés sur ordinateur.
CAO1 La C.A.O (Conception Assistée par Ordinateur). Aujourd'hui, lorsque des ingénieurs décident de concevoir un nouveau produit, ils n'utilisent plus de stylo. Les plans sont réalisés sur ordinateur.
Angles orientés et fonctions circulaires ( En première S )
") Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Angles orientés et fonctions circulaires ( En première S ) Dernière mise à jour : Jeudi 01 Septembre 010 Vincent OBATON, Enseignant au lycée Stendhal de Grenoble (Année 006-007) Lycée Stendhal, Grenoble
Rosemount 333 HART Tri-Loop
 Fiche de spécification Rosemount 333 Rosemount 333 HART Tri-Loop CONVERTISSEUR DE SIGNAUX HART EN SIGNAUX ANALOGIQUES Convertit un signal numérique HART en trois signaux analogiques supplémentaires Facilité
Fiche de spécification Rosemount 333 Rosemount 333 HART Tri-Loop CONVERTISSEUR DE SIGNAUX HART EN SIGNAUX ANALOGIQUES Convertit un signal numérique HART en trois signaux analogiques supplémentaires Facilité
Communiqué de presse
 Les services préventifs avancés de GF AgieCharmilles augmentent la capacité de vos machines pour plus de succès Cinq nouveaux services préventifs avancés viennent compléter les Customer Services de GF
Les services préventifs avancés de GF AgieCharmilles augmentent la capacité de vos machines pour plus de succès Cinq nouveaux services préventifs avancés viennent compléter les Customer Services de GF
G.P. DNS02 Septembre 2012. Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3. Réfraction
 DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux. - Section Audioprothésiste / stage i-prépa intensif -
 POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
POLY-PREPAS Centre de Préparation aux Concours Paramédicaux - Section Audioprothésiste / stage i-prépa intensif - 70 Chapitre 8 : Champ de gravitation - Satellites I. Loi de gravitation universelle : (
Jean-Marc Schaffner Ateliers SCHAFFNER. Laure Delaporte ConstruirAcier. Jérémy Trouart Union des Métalliers
 Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Jean-Marc Schaffner Ateliers SCHAFFNER Laure Delaporte ConstruirAcier Jérémy Trouart Union des Métalliers Jean-Marc SCHAFFNER des Ateliers SCHAFFNER chef de file du GT4 Jérémy TROUART de l Union des Métalliers
Mario Geiger octobre 08 ÉVAPORATION SOUS VIDE
 ÉVAPORATION SOUS VIDE 1 I SOMMAIRE I Sommaire... 2 II Évaporation sous vide... 3 III Description de l installation... 5 IV Travail pratique... 6 But du travail... 6 Principe... 6 Matériel... 6 Méthodes...
ÉVAPORATION SOUS VIDE 1 I SOMMAIRE I Sommaire... 2 II Évaporation sous vide... 3 III Description de l installation... 5 IV Travail pratique... 6 But du travail... 6 Principe... 6 Matériel... 6 Méthodes...
Mesure d angles et trigonométrie
 Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
Thierry Ciblac Mesure d angles et trigonométrie Mesure de l angle de deux axes (ou de deux demi-droites) de même origine. - Mesures en degrés : Divisons un cercle en 360 parties égales définissant ainsi
Centreur fin cylindrique pour la fabrication de moules. Le développement
 Le développement Centreur fin cylindrique pour la fabrication de moules Avantages Durabilité: pour la production de grandes séries Sans jeu pour un alignement précis du moule Temps de cycle plus courts
Le développement Centreur fin cylindrique pour la fabrication de moules Avantages Durabilité: pour la production de grandes séries Sans jeu pour un alignement précis du moule Temps de cycle plus courts
C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position OM est constant et il est égal au
 1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 2 C est un mouvement plan dont la trajectoire est un cercle ou une portion de cercle. Le module du vecteur position est constant et il est égal au rayon du cercle. = 3 A- ouvement circulaire non uniforme
1 Complément sur la projection du nuage des individus
 TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
TP 0 : Analyse en composantes principales (II) Le but de ce TP est d approfondir nos connaissances concernant l analyse en composantes principales (ACP). Pour cela, on reprend les notations du précédent
Calcul intégral élémentaire en plusieurs variables
 Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
Calcul intégral élémentaire en plusieurs variables PC*2 2 septembre 2009 Avant-propos À part le théorème de Fubini qui sera démontré dans le cours sur les intégrales à paramètres et qui ne semble pas explicitement
DIFFRACTion des ondes
 DIFFRACTion des ondes I DIFFRACTION DES ONDES PAR LA CUVE À ONDES Lorsqu'une onde plane traverse un trou, elle se transforme en onde circulaire. On dit que l'onde plane est diffractée par le trou. Ce phénomène
DIFFRACTion des ondes I DIFFRACTION DES ONDES PAR LA CUVE À ONDES Lorsqu'une onde plane traverse un trou, elle se transforme en onde circulaire. On dit que l'onde plane est diffractée par le trou. Ce phénomène
Les Conditions aux limites
 Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
Chapitre 5 Les Conditions aux limites Lorsque nous désirons appliquer les équations de base de l EM à des problèmes d exploration géophysique, il est essentiel, pour pouvoir résoudre les équations différentielles,
NOTICE D' UTILISATION CAMWORKS FRAISAGE. Luc Vallée Lycée Blaise Pascal Segré
 NOTICE D' UTILISATION Luc Vallée Lycée Blaise Pascal Segré FRAISAGE SOMMAIRE allée Sciences et techniques Fiche n 1 - Généralités principe....page 3 Fiche n 2 - Lancer une application fraisage...page 7
NOTICE D' UTILISATION Luc Vallée Lycée Blaise Pascal Segré FRAISAGE SOMMAIRE allée Sciences et techniques Fiche n 1 - Généralités principe....page 3 Fiche n 2 - Lancer une application fraisage...page 7
La réglementation et les obligations qui en découlent
 Accessibilité en milieu urbain La réglementation et les obligations qui en découlent Actualités : les BEV La norme Afnor NF P 98-351 relative aux caractéristiques et essais des dispositifs podotactiles
Accessibilité en milieu urbain La réglementation et les obligations qui en découlent Actualités : les BEV La norme Afnor NF P 98-351 relative aux caractéristiques et essais des dispositifs podotactiles
modélisation solide et dessin technique
 CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
CHAPITRE 1 modélisation solide et dessin technique Les sciences graphiques regroupent un ensemble de techniques graphiques utilisées quotidiennement par les ingénieurs pour exprimer des idées, concevoir
Manuel des bonnes pratiques avec CATIA V.5
 2009 Manuel des bonnes pratiques avec CATIA V.5 Pour aller plus loin dans la maîtrise de l outil CAO Ce document a pour objectif de donner des méthodologies et règles de travail qui permettent de mener
2009 Manuel des bonnes pratiques avec CATIA V.5 Pour aller plus loin dans la maîtrise de l outil CAO Ce document a pour objectif de donner des méthodologies et règles de travail qui permettent de mener
FICHE TECHNIQUE. Domaines d applications. Stockage / Mise en oeuvre. Caractéristiques physiques et techniques STOCKAGE MISE EN OEUVRE
 FICHE TECHNIQUE PLANS DE TRAVAIL EGGER EUROSPAN Les plans de travail EGGER EUROSPAN se composent d un panneau support EUROSPAN à faible émission de formaldéhyde E1 et d un stratifié décoratif plaqué uniformément
FICHE TECHNIQUE PLANS DE TRAVAIL EGGER EUROSPAN Les plans de travail EGGER EUROSPAN se composent d un panneau support EUROSPAN à faible émission de formaldéhyde E1 et d un stratifié décoratif plaqué uniformément
Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN.
 TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
TD 6 corrigé - PFS Résolution analytique (Loi entrée-sortie statique) Page 1/1 Corrigé Exercice 1 : BRIDE HYDRAULIQUE AVEC HYPOTHÈSE PROBLÈME PLAN. Question : Réaliser le graphe de structure, puis compléter
JEAN-LUC VIRUÉGA. Traçabilité. Outils, méthodes et pratiques. Éditions d Organisation, 2005 ISBN : 2-7081-3260-1
 JEAN-LUC VIRUÉGA Traçabilité Outils, méthodes et pratiques, 2005 ISBN : 2-7081-3260-1 2 à l assurance qualité Après la définition de la traçabilité dans la métrologie, on peut remarquer que le domaine
JEAN-LUC VIRUÉGA Traçabilité Outils, méthodes et pratiques, 2005 ISBN : 2-7081-3260-1 2 à l assurance qualité Après la définition de la traçabilité dans la métrologie, on peut remarquer que le domaine
I - Quelques propriétés des étoiles à neutrons
 Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
Formation Interuniversitaire de Physique Option de L3 Ecole Normale Supérieure de Paris Astrophysique Patrick Hennebelle François Levrier Sixième TD 14 avril 2015 Les étoiles dont la masse initiale est
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ
 Pierre-Louis GONZALEZ") L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
L ANALYSE EN COMPOSANTES PRINCIPALES (A.C.P.) Pierre-Louis GONZALEZ INTRODUCTION Données : n individus observés sur p variables quantitatives. L A.C.P. permet d eplorer les liaisons entre variables et
TS 35 Numériser. Activité introductive - Exercice et démarche expérimentale en fin d activité Notions et contenus du programme de Terminale S
 FICHE Fiche à destination des enseignants TS 35 Numériser Type d'activité Activité introductive - Exercice et démarche expérimentale en fin d activité Notions et contenus du programme de Terminale S Compétences
FICHE Fiche à destination des enseignants TS 35 Numériser Type d'activité Activité introductive - Exercice et démarche expérimentale en fin d activité Notions et contenus du programme de Terminale S Compétences
A - ÉPREUVE FINALE (voir croquis joints)
") 24 e concours MOF ÉPREUVE QUALIFICATIVE de l examen dénommé Concours «Un des Meilleurs Ouvriers de France» Groupe VIII Classe 1 OUTILLAGE ET PROTOTYPAGE MECANIQUE 31 Mai 2009 Conformément au référentiel
24 e concours MOF ÉPREUVE QUALIFICATIVE de l examen dénommé Concours «Un des Meilleurs Ouvriers de France» Groupe VIII Classe 1 OUTILLAGE ET PROTOTYPAGE MECANIQUE 31 Mai 2009 Conformément au référentiel
LA MESURE DE LA PRESSION
 LA MESURE DE LA PRESSION La mesure de la pression s effectue à l aide d un baromètre. Il s agit d un instrument permettant de repérer la pression de l atmosphère dans laquelle il se trouve et ses variations
LA MESURE DE LA PRESSION La mesure de la pression s effectue à l aide d un baromètre. Il s agit d un instrument permettant de repérer la pression de l atmosphère dans laquelle il se trouve et ses variations
COMPTE-RENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre?
 Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
Claire FORGACZ Marion GALLART Hasnia GOUDJILI COMPTERENDU «MATHS EN JEANS» LYCEE OZENNE Groupe 1 : Comment faire une carte juste de la Terre? Si l on se pose la question de savoir comment on peut faire
Correction sujet machine à pain
 Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
Correction sujet machine à pain 2 CHOIX DU MOTEUR ET DE SA TRANSMISSION DE PUISSANCE 2.1 ANALYSE FONCTIONNELLE PRELIMINAIRE Question N 1 : Mélangeage et pétrissage Composants de transmission par lesquels
TS Physique Satellite à la recherche de sa planète Exercice résolu
 P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
P a g e 1 Phsique atellite à la recherche de sa planète Exercice résolu Enoncé Le centre spatial de Kourou a lancé le 1 décembre 005, avec une fusée Ariane 5, un satellite de météorologie de seconde génération
Formation des enseignants. Le tensiomètre. Objet technique modélisable issu de l environnement des élèves
 Le tensiomètre Objet technique modélisable issu de l environnement des élèves Un peu d'histoire C'est en 1628 que W. Harvey découvrit la circulation du sang. C'est pourtant seulement en 1730 que la pression
Le tensiomètre Objet technique modélisable issu de l environnement des élèves Un peu d'histoire C'est en 1628 que W. Harvey découvrit la circulation du sang. C'est pourtant seulement en 1730 que la pression
RAPPORT DE CLASSEMENT. RAPPORT DE CLASSEMENT n EFR-14-002348
 Voie Romaine F-57280 Maizières-lès-Metz Tél : +33 (0)3 87 51 11 11 Fax : +33 (0 3 87 51 10 58 n EFR-14-002348 Selon les normes EN 15650 : 2010 et EN 13501-3 : 2007 Concernant Une gamme de clapets type
Voie Romaine F-57280 Maizières-lès-Metz Tél : +33 (0)3 87 51 11 11 Fax : +33 (0 3 87 51 10 58 n EFR-14-002348 Selon les normes EN 15650 : 2010 et EN 13501-3 : 2007 Concernant Une gamme de clapets type
Paris et New-York sont-ils les sommets d'un carré?
 page 95 Paris et New-York sont-ils les sommets d'un carré? par othi Mok (3 ), Michel Vongsavanh (3 ), Eric hin (3 ), iek-hor Lim ( ), Eric kbaraly ( ), élèves et anciens élèves du ollège Victor Hugo (2
page 95 Paris et New-York sont-ils les sommets d'un carré? par othi Mok (3 ), Michel Vongsavanh (3 ), Eric hin (3 ), iek-hor Lim ( ), Eric kbaraly ( ), élèves et anciens élèves du ollège Victor Hugo (2
Guide pour l analyse de l existant technique. Partie 3
 Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Partie 3 La Liaison Pivot sur roulement : Le Composant ROULEMENT 0 Introduction Le but de ce guide est de vous permettre une meilleure rédaction des rapports de Bureaux d Études que vous aurez à nous remettre
Généralités. Aperçu. Introduction. Précision. Instruction de montage. Lubrification. Conception. Produits. Guides à brides FNS. Guides standards GNS
 Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Généralités Aperçu Introduction Précision Instruction de montage Lubrification Conception page............................. 4............................. 5............................. 6.............................
Repérage d un point - Vitesse et
 PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
PSI - écanique I - Repérage d un point - Vitesse et accélération page 1/6 Repérage d un point - Vitesse et accélération Table des matières 1 Espace et temps - Référentiel d observation 1 2 Coordonnées
POLITIQUE ET LIGNES DIRECTRICES EN MATIERE DE TRACABILITE DES RESULTATS DE MESURE
 BELAC 2-003 Rev 1-2014 POLITIQUE ET LIGNES DIRECTRICES EN MATIERE DE TRACABILITE DES RESULTATS DE MESURE Les versions des documents du système de management de BELAC telles que disponibles sur le site
BELAC 2-003 Rev 1-2014 POLITIQUE ET LIGNES DIRECTRICES EN MATIERE DE TRACABILITE DES RESULTATS DE MESURE Les versions des documents du système de management de BELAC telles que disponibles sur le site
Calculateurs pour la métrologie
 Calculateurs pour la métrologie Septembre 2010 Dans le cadre d'applications en métrologie du simple poste de mesure jusqu'à des systèmes complexes multipostes HEIDENHAIN met à votre disposition des calculateurs
Calculateurs pour la métrologie Septembre 2010 Dans le cadre d'applications en métrologie du simple poste de mesure jusqu'à des systèmes complexes multipostes HEIDENHAIN met à votre disposition des calculateurs
LA RUBRIQUE «SUR MESURE»
 LA RUBRIQUE «SUR MESURE» MOYENS D ACCÈS EN HAUTEUR NOS EXPERTS ONT IMAGINÉ VOS SOLUTIONS. Maintenance industrielle, aéronautique, agro-alimentaire, logistique, transport, btp, entretien de mobilier urbain
LA RUBRIQUE «SUR MESURE» MOYENS D ACCÈS EN HAUTEUR NOS EXPERTS ONT IMAGINÉ VOS SOLUTIONS. Maintenance industrielle, aéronautique, agro-alimentaire, logistique, transport, btp, entretien de mobilier urbain
F411 - Courbes Paramétrées, Polaires
 1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
1/43 Courbes Paramétrées Courbes polaires Longueur d un arc, Courbure F411 - Courbes Paramétrées, Polaires Michel Fournié [email protected] http://www.math.univ-toulouse.fr/ fournie/ Année 2012/2013
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
Repérage de l artillerie par le son.
 Repérage de l artillerie par le son. Le repérage par le son permet de situer avec précision une batterie ennemie, qu elle soit ou non bien dissimulée. Le son se propage avec une vitesse sensiblement constante,
Repérage de l artillerie par le son. Le repérage par le son permet de situer avec précision une batterie ennemie, qu elle soit ou non bien dissimulée. Le son se propage avec une vitesse sensiblement constante,
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE
 COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
COURS EULER: PROGRAMME DE LA PREMIÈRE ANNÉE Le cours de la première année concerne les sujets de 9ème et 10ème années scolaires. Il y a bien sûr des différences puisque nous commençons par exemple par
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
MetLogix M2 Logiciel de mesure pour tablette PC
 Avec le logiciel de mesure M2, de nouvelles possibilités s offrent à vous en termes d utilisation et de précision de mesure de grandeurs géométriques au moyen de microscopes de mesure ou projecteurs de
Avec le logiciel de mesure M2, de nouvelles possibilités s offrent à vous en termes d utilisation et de précision de mesure de grandeurs géométriques au moyen de microscopes de mesure ou projecteurs de
La polarisation des transistors
 La polarisation des transistors Droite de charge en continu, en courant continu, statique ou en régime statique (voir : le transistor) On peut tracer la droite de charge sur les caractéristiques de collecteur
La polarisation des transistors Droite de charge en continu, en courant continu, statique ou en régime statique (voir : le transistor) On peut tracer la droite de charge sur les caractéristiques de collecteur
Chapitre 2 : Caractéristiques du mouvement d un solide
 Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Chapitre 2 : Caractéristiques du mouvement d un solide I Rappels : Référentiel : Le mouvement d un corps est décris par rapport à un corps de référence et dépend du choix de ce corps. Ce corps de référence
Programmation linéaire
 1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
1 Programmation linéaire 1. Le problème, un exemple. 2. Le cas b = 0 3. Théorème de dualité 4. L algorithme du simplexe 5. Problèmes équivalents 6. Complexité de l Algorithme 2 Position du problème Soit
Acquisition. d une centrale de surveillance des températures CAHIER DES CHARGES. Maître de l'ouvrage :
 Acquisition d une centrale de surveillance des températures CAHIER DES CHARGES Maître de l'ouvrage : INSTITUT NATIONAL DE LA RECHERCHE AGRONOMIQUE Etablissement public à caractère Scientifique et Technologique
Acquisition d une centrale de surveillance des températures CAHIER DES CHARGES Maître de l'ouvrage : INSTITUT NATIONAL DE LA RECHERCHE AGRONOMIQUE Etablissement public à caractère Scientifique et Technologique
1S Modèles de rédaction Enoncés
 Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
Par l équipe des professeurs de 1S du lycée Parc de Vilgénis 1S Modèles de rédaction Enoncés Produit scalaire & Corrigés Exercice 1 : définition du produit scalaire Soit ABC un triangle tel que AB, AC
TSTI 2D CH X : Exemples de lois à densité 1
 TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
TSTI 2D CH X : Exemples de lois à densité I Loi uniforme sur ab ; ) Introduction Dans cette activité, on s intéresse à la modélisation du tirage au hasard d un nombre réel de l intervalle [0 ;], chacun
La perspective conique
 La perspective conique Définitions et principes. Deux cas de la perspective conique : la perspective conique oblique et la perspective conique centrale. Principe de la perspective conique : . La perspective
La perspective conique Définitions et principes. Deux cas de la perspective conique : la perspective conique oblique et la perspective conique centrale. Principe de la perspective conique : . La perspective
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493
 Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Système d automation TROVIS 6400 Régulateur compact TROVIS 6493 pour montage encastré (dimensions de la face avant 48 x 96 mm / 1.89 x 3.78 ) Application Régulateur compact à microprocesseur avec logiciel
Serrure Motorisée Asservie - Mise en Applique
 ZD313357 Ve B MAJ le 21.03.13 Serrure Motorisée Asservie - Mise en Applique Notice d installation Verrouillage motorisé 1 / 2 point (s). Système à sécurité positive (rupture de courant) Conforme à la norme
ZD313357 Ve B MAJ le 21.03.13 Serrure Motorisée Asservie - Mise en Applique Notice d installation Verrouillage motorisé 1 / 2 point (s). Système à sécurité positive (rupture de courant) Conforme à la norme
BROCHURE PRODUIT. Swift-fix Solutions de fixation des pièces pour les applications de mesure
 BROCHURE PRODUIT Swift-fix Solutions de fixation des pièces pour les applications de mesure swift-fix Une gamme unique de systèmes de fixation et de serrage de pièces, signée Hexagon Metrology Swift-fix
BROCHURE PRODUIT Swift-fix Solutions de fixation des pièces pour les applications de mesure swift-fix Une gamme unique de systèmes de fixation et de serrage de pièces, signée Hexagon Metrology Swift-fix
Recopieur de position Type 4748
 Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Recopieur de position Type 4748 Fig. 1 Type 4748 1. Conception et fonctionnement Le recopieur de position type 4748 détermine un signal de sortie analogique 4 à 20 ma correspondant à la position de vanne
Mesure de conductivité on-line. Mesurer Surveiller Régler. Mesure de conductivité on-line. Eaux d égout communales et eaux usées industrielles
 Mesure de conductivité on-line Mesurer Surveiller Régler La mesure de conductivité est un paramètre reconnu, dont on ne peut plus se passer en analyse moderne des process, des eaux et eaux usées. On utilise
Mesure de conductivité on-line Mesurer Surveiller Régler La mesure de conductivité est un paramètre reconnu, dont on ne peut plus se passer en analyse moderne des process, des eaux et eaux usées. On utilise
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1
 Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes
Chafa Azzedine - Faculté de Physique U.S.T.H.B 1 Définition: La cinématique est une branche de la mécanique qui étudie les mouements des corps dans l espace en fonction du temps indépendamment des causes