Automatique des systèmes linéaires continus
|
|
|
- Lucien Basile Forget
- il y a 10 ans
- Total affichages :
Transcription
1 MINISTERE DE L ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE DES SCIENCES ET DE LA TECHNOLOGIE D ORAN-M B- FACULTE DE GENIE ELECTRIQUE DEPARTEMENT D AUTOMATIQUE Polycopié de : Automatique des systèmes linéaires continus Présenté par : Dr. ZELMAT Mohammed El Mouloud Septembre 2014

2 Avant-propos Ce polycopié de donne les éléments de base nécessaires à la compréhension des systèmes asservis linéaires. Il s adresse aux étudiants de la troisième année préparant une licence en automatique. Fonctionnement général Organisation du cycle Le cycle de TP se déroule sur 6 séances (Salle de TP 5110 A) Il comprend 6 manipulations de 2 heures chacune. Les différentes manipulations sont décrites par la liste ci-dessous. LISTE DES MANIPULATIONS TP 1 Amplificateur opérationnel 1 TP 2 Amplificateur opérationnel 2 TP 3 Introduction au logiciel Matlab TP 4 Analyse temporelle d un système dynamique du 1 er ordre TP 5 Analyse temporelle d un système dynamique du 2 ème ordre TP 6 Analyse fréquentielle, stabilité et asservissement d un système Notation Chaque manipulation donne lieu à un compte-rendu par groupe à rendre, et qui fera l objet d une note qui prend en compte la préparation (contrôlée en début de séance), la participation des étudiants au déroulement du TP, les résultats obtenus et leur interprétation. La moyenne des 6 notes obtenues (une par TP) constituera la note finale associée à ce cycle d enseignement. En cas d absence prévisible et préalablement justifiée par la Direction des études lors d une séance, les étudiants doivent impérativement prévenir l enseignant qui les encadre. Les absences injustifiées donnent lieu à un zéro pour la séance concernée, sans aucune possibilité de rattrapage. De plus, tout retard non justifié à une séance entrainera la pondération de la note obtenue par l étudiant à cette séance par un coefficient égal au prorata de la présence de l étudiant durant la séance.

3 Automatique et informatique industrielle L3 Travaux Pratiques TP1 : Amplificateur Opérationnel 1 dynamique du 2 ème ordre. I. Objectifs pédagogiques Etude théorique d un amplificateur opérationnel et manipulation sur quelques montages de base : Amplificateur inverseur ; Amplificateur non inverseur ; Amplificateur comparateur. II. Matériels utilisés Une alimentation stabilisante + 15V ; Un générateur de fonction ; Un oscilloscope double trace ; Une plaque d essais universelle ; Un amplificateur, des résistances et des condensateurs ; Un potentiomètre ; Jeu de lignes de connexion des connecteurs. III. Rappels théoriques L amplificateur opérationnel (A.O) est un circuit intégré associée à des éléments passifs ou actifs, permet de réaliser des opérations sur des grandeurs analogiques (addition, multiplication, dérivation, intégration etc.). Pour fonctionner, il doit donc être polarisé (entre -15V et +15V). A étant très élevée (~100000), U D est très faible en régime linéaire : U D <1µV. Pour un amplificateur opérationnel parfait (idéal) fonctionnant en régime linéaire : U D = E + - E - 0 I + = I - = 0 1

4 Automatique et informatique industrielle L3 Travaux Pratiques IV. Montages fondamentaux de l amplificateur opérationnel Les amplificateurs opérationnels sont souvent exploités avec la contre réaction. Une partie de la tension de sortie est ramenée à l entrée E - par la résistance R g. 1. Montage Inverseur Dans ce montage Fig. 3, la tension d entrée U E est appliquée par la résistance R 1. ( ) ( ) L amplificateur : 2

5 Automatique et informatique industrielle L3 Travaux Pratiques 2. Montage non Inverseur Dans ce montage Fig. 4, la résistance R 1 forme un diviseur de tension avec la résistance R g. ( ) ( ). L amplificateur : 3. Montage Comparateur Ce circuit Fig. 5 sert à comparer les deux tensions V 1 et V 2. V 1 = U E (Tension d entrée) ; V 2 = V ref (Tension de référence) U s (t) = + V cc si V 1 < V 2 ; U s (t) = - V cc si V 1 > V 2 3
 ; V 2 = V ref (Tension de référence) U s (t) = + V cc si V 1 < V 2 ; U s (t)")
6 Automatique et informatique industrielle L3 Travaux Pratiques V. Travail expérimental Remarques importantes à suivre avant toute mise en œuvre : Vérifier que l alimentation est coupée avant chaque manipulation ; Alimenter d abord le circuit avant d injecter un signal d entrée. 1. Application du montage inverseur : 1.1 Construire le montage Fig.3, avec R 1 =1 KOhm et R g = 2,2 KOhm ; Sélectionner une tension d entrée sinusoïdale d amplitude 4V et de fréquence = 1Khz ; Identifier les deux tensions observées sur l oscilloscope ; Tracer les courbes U E = f(t) et U s = f(t). Bien noter leurs valeurs maximales ainsi que la période T du signal ; Calculer l amplification du montage Faites varier la tension d entrée et mesurer les tensions de sortie correspondants : U E (V) U s (V) Tracer U s = (U E ) ; Vérifier que V= - = Modifier le circuit extérieur (R 1 =10 KOhm, R g =10 KOhm) ensuite (R 1 = 22 KOhm, R g = 10 KOhm) et répondre aux questions décrites dans Application du montage non inverseur Construire le montage Fig.4, et répondre aux questions décrites dans la manipulation précédente avec la prise en considération de l amplification correspondante à ce montage. 3. Application du montage comparateur Construire le montage Fig.5, avec R 1= R 2 = 1 k0hm et P =10 k0hm, Pour cette expérience, V 2 est la tension de référence à valeur fixe comparée a V 1 variable représentant la tension d entrée ; Mesurer V 2 et sélectionner une tension d entrée continue ; Identifier les deux tensions observées sur l oscilloscope ; Faire varier la tension d entrée et mesurer les tensions de sortie correspondantes. 4

7 Automatique et informatique industrielle L3 Travaux Pratiques U E (V) U S (V) Que peut on conclure? VI. Conclusion générale Faites vos conclusions sur les montages que vous avez réalisé. 5

8 TP2 : Amplificateur Opérationnel 2 I. Objectifs pédagogiques Etude théorique et manipulations sur quelques montages réalisés à base d amplificateur opérationnel : Sommateur ; Intégrateur; Dérivateur. II. Matériels utilisés Une alimentation stabilisante + 15V ; Un générateur de fonction ; Un oscilloscope double trace ; Une plaque d essais universelle ; Un amplificateur, des résistances et des condensateurs ; Un potentiomètre ; Jeu de lignes de connexion des connecteurs. III. Rappels théoriques III.1 Montage Sommateur Ce circuit Fig. 6 sert à additionner les deux tensions d entrée U E1 (t) et U E2 (t) Fig.6 Amplificateur sommateur 6

9 Automatique et Informatique Industrielle L3 III.2 Montage Intégrateur Un intégrateur Fig. 7 est un circuit dont la tension de sortie est proportionnelle à la tension d entrée lorsque celle-ci est appliquée. On peut ainsi convertir des tensions rectangulaires en tensions triangulaires avec différentes pentes. ( ) ( ) III.3 Montage dérivateur Un dérivateur est un circuit dont la tension de sortie est proportionnelle à la vitesse à laquelle varie la tension d entrée. Des tensions rectangulaires peuvent donc être transformées en impulsions en dents. Fig.8 Amplificateur dérivateur 7

10 Automatique et Informatique Industrielle L3 IV. Travail expérimental IV.1 Application du montage Sommateur Construire le montage Fig.6 ; avec R1= R2= R3 ; après avoir calculé leurs valeurs pour que Us = 8V, UE1= UE2 = 4V et la fréquence = 1Khz ; Identifier les tensions observées sur l oscilloscope ; Tracer les courbes UE = (t) et Us = (t). Bien noter leurs valeurs maximales ainsi que la période T du signal ; Que se passe-t-il si on prend R1= R2 et R3 = 47 KOhm? IV.2 Application du montage intégrateur IV.2.1 Construire le montage Fig.7 ; avec R= 10 Ohm et Cg = 50 nf (2 0.1µF en série). Sélectionner une tension d entrée rectangulaire d amplitude 50 mv et de fréquence = 1Khz Identifier les deux tensions d entrée et de sortie observées sur l oscilloscope ; Tracer les courbes UE= ( ) et Us = ( ). Bien noter leurs valeurs maximales ainsi que la période T du signal. IV.2.2 Varier la capacité de la contre réaction Cg= 0.2µF (2 0.1µF en parallèle) et répéter les mesures de l expérience IV.2.1 et tracer les courbes visualisées sur l oscilloscope. IV.2.3 Comparer les courbes de la tension de sortie des expériences IV.2.1 et IV.2.2 et interpréter les résultats. IV.3 Application du montage dérivateur IV.3.1 Construire le montage Fig.8 ; avec R= 10 Ohm et Cg= 50nF (2 0.1µF en série) ; Sélectionner une tension d entrée rectangulaire d amplitude 1V et de fréquence ; Tracer les courbes UE = ( ) et Us = ( ). Bien noter leurs valeurs maximales ainsi que la période T du signal. IV.3.2 Varier la capacité de la contre réaction Cg= 0.2µF (2 0.1µF en parallèle), répéter les mesures de l expérience IV.3.1 et tracer les courbes visualisées sur l oscilloscope. IV.3.3 Comparer les courbes de la tension de sortie des expériences IV.3.1 et IV.3.2 et interpréter les résultats. V. Conclusion générale Faites vos conclusions sur les montages que vous avez réalisé. 8
.")
11 TP N 3: Introduction au logiciel Matlab I. Objectifs pédagogiques dynamique Etude des commandes de base du logiciel Matlab et réalisation de programmes Matlab pour la simulation numérique des systèmes asservis. II. Introduction Matlab (abréviation de «Matrix Laboratory») est un environnement informatique conçu pour manipuler aisément des matrices à l aide de fonction préprogrammées (addition, multiplication, inversion, décompositions, déterminants ), en s affranchissant des contraintes des langages de programmation classique : Plus de déclarations de variables. Plus de phase d édition-compilation-exécution. L élément de base est une matrice dont la dimension n a pas à être fixée. Matlab est un outil puissant qui permet la résolution de nombreux problème en beaucoup moins de temps qu il n en faudrait pour les formuler en C ou en Pascal. S il est parfaitement adapté à l Automatique et au Traitement du Signale, sa facilité d emploi avec des nombres complexes et ses possibilités d affichages graphiques en font un outil intéressant pour bien d autres type d applications. De plus, des «toolboxes» (boite à outils) sont disponibles dans de nombreux domaines (Contrôle, Robotique, traitement de signal, traitement d image, optimisation, ). Cet aspect modulaire est l un des plus grands atouts de Matlab : l utilisateur peut lui même définir ses propres fonctions, en regroupant des instructions Matlab dans un fichier portant le suffixe.m. Matlab peut être donc considéré comme un langage de programmation au même titre que C, Pascal ou Basic. C est un langage interprété, c'est-à-dire, que les instructions sont exécutées immédiatement après avoir été tapées. Matlab permit de développer des algorithmes rapidement, de visualiser des données (sous forme de graphiques 2D ou 3D et d images, avoir de séquence d image), et de réaliser des interfaces graphiques. III. Généralités et prise en main III.1 Démarrage, quitter Pour démarrer Matlab, il suffit de cliquer dans l'icône "Matlab" si vous êtes sous Windows. L'espace de travail de Matlab se présente alors sous la forme d'une fenêtre affichant un prompt ">>" à la suite duquel vous pouvez taper une commande qui sera exécutée après avoir tapé sur la touche "return" (retour chariot). 9
, en s affranchissant des contraintes des langages de programmation classique : Plus de déclarations de variables.")
12 En haut de cette fenêtre se trouve une barre de menu qui vous permet d'ouvrir un fichier texte, de définir certaines variables de travail et surtout d'accéder à l'ensemble des fichiers d'aides. Vous pourrez quitter la session avec la commande quit. III.2 L espace de travail (workspace) Comme tout langage de programmation, Matlab permet de définir des données variables. Les variables sont définies au fur et à mesure que l on donne leurs noms (identificateur) et leurs valeurs numériques ou leurs expressions mathématiques. Matlab ne nécessite pas la déclaration de type ou de dimension pour une variable. Les variables sont stockées dans l espace de travail (ou workspace) et peuvent être utilisées dans les calculs subséquents. III.3 Langage interprété Matlab est un langage interprété. Il n'est pas nécessaire de compiler un programme avant de l'exécuter et toute commande tapée dans la fenêtre de commande est immédiatement exécutée (après la frappe de return). >> 2+2 ans = 4 >> 5^2 ans = 25 La réponse est affichée et stockée dans la variable ans. La plupart des fonctions mathématiques usuelles sont définies dans Matlab, et ceci sous une forme naturelle (sin, cos, exp,...) de même que certaines constantes (pi...). >> 2*sin(pi/4) ans = III.4 Variables Matlab considère trois types de variables (réel, complexe et chaînes de caractères). En fait, toute variable de Matlab est une matrice (scalaire : matrice 1x1, vecteur : matrice 1xN ou Nx1). On peut indiquer le nom de la variable dans laquelle le résultat doit être stocké (commence par une lettre, moins de 19 caractères). Attention, Matlab prend en considération les majuscules (x est différent de X). >> x = pi/4 x =

13 Le nom de cette variable ainsi que le résultat sont affichés. Un point virgule (;) à la fin de la ligne permet de ne pas afficher ce résultat. On peut taper plusieurs commandes par ligne, séparées par un point virgule. >> x = pi/2; y = sin(x); Lorsqu'une ligne de commande est trop longue on peut l'interrompre par trois points (...) et la poursuivre à la ligne suivante, on peut aussi mettre des commentaires dans une ligne de commande à l'aide du signe " % ". III.4.1 Effacement et liste des variables La commande clear permet d effacer une partie ou toutes les variables définies jusqu à présent. Il est conseillé de placer cette commande au début de vos fichiers de commandes, en particulier lorsque vous manipulez des tableaux. Syntaxe : >>clear var1 var2 var3... Si aucune variable n est spécifiée, toutes les variables seront effacées. La commande who affiche les noms de toutes les variables en cours. III.4.2 Variables complexes Matlab travaille indifféremment avec des nombres réels et complexes. Par défaut les variables i et j sont initialisées à la valeur complexe. Naturellement si vous redéfinissez la variable i ou j avec une autre valeur elle n'aura plus la même signification. >> z = 3 + 2*i z = i Les fonctions usuelles de manipulation des nombres complexes sont prédéfinies dans Matlab : real, imag, abs, angle (en radian), conj. III.4.3 Chaînes de caractères >> r = abs(z); >> theta = angle(z); >> y = r*exp(i*theta); Comme on l'a vu précédemment, toute variable de Matlab est une matrice. Cependant, il peut être utile de conserver des chaînes de caractères dans des variables, et cela se fait de façon tout à fait naturelle : >> message = 'bienvenue sur Matlab' On peut alors réaliser des manipulations de même type que pour les vecteurs 11

14 >> message = [message, ' version 4.1'] message = bienvenue sur Matlab version 4.1 On peut convertir des nombres en chaîne de caractères à l'aide des fonctions num2str, int2str, sprintf. Par exemple : >> message = ['pi vaut ', num2str(pi)] message = pi vaut III.5 Vecteurs, matrices et leur manipulation On peut spécifier directement une matrice sous la forme d'un tableau, l'espace ou la virgule sépare deux éléments d'une même ligne, les points virgules séparent les éléments de lignes distinctes. >> A = [ 1, 2, 3 ; 4, 5, 6 ; 7, 8, 9 ] A = Les éléments d'une matrice peuvent être n'importe quelle expression de Matlab : >> x = [ -1.3, sqrt(3), (1+2+3)*4/5 ] x = Les éléments d'une matrice peuvent être référencés par leurs indices : >>x(2) ans = >>x(5) = abs(x(1)) x = On peut remarquer que la taille du vecteur x a été ajustée en remplissant les éléments non précisés par 0. On peut aussi créer des matrices avec les fonctions zeros, ones et eye, ces fonctions créent des matrices de la taille précisée, respectivement remplies de zéros, de un, et de un sur la diagonale et des zéros ailleurs (eye = prononciation anglaise de I comme identité). >> eye(2,3) ans = >> ones(1,5) ans =

15 On peut avoir des informations sur la taille d'une matrice : >> size(x) ans = 1 5 >> length(x) ans = 5 On peut ajouter des lignes et des colonnes à des matrices déjà existantes. >> r1 = [10, 11, 12]; >> A = [A ; r1] A = >> r2 = zeros(4,1); >> A = [A, r2] A = III.6 L'opérateur " : " Cet opérateur, sous Matlab, peut être considéré comme l'opérateur d'énumération. Sa syntaxe usuelle est : deb:pas:fin Il construit un vecteur dont le premier élément est deb puis deb+pas, deb+2*pas... jusqu'à deb+n*pas tel que deb+n*pas fin < deb+(n+1)*pas. >> x = 0.5:0.1:0.85 x = Le pas d'incrémentation peut être omis, 1 est alors pris par défaut : >> x =1:5 x =
*pas. >> x = 0.")
16 On peut aussi utiliser le " : " pour sélectionner des éléments d'un vecteur ou d'une matrice : >> A(1,3) % Troisième élément de la première ligne de A >> A(1,1:3) % Premier, deuxième et troisième éléments de la première ligne de A >> A(1,:) % Tous les éléments de la première ligne >> A(:,3) % Tous les éléments de la troisième colonne >> A(:) % Vecteur colonne contenant tous les éléments de A lus colonne par colonne. III.7 Exemple d extraction de sous-tableaux tableau(début :fin, début :fin) >> M = [1 2 3; ; ] >> M(1:2,2:3)% permet d extraire la matrice M=[2,3 ;12,13] ans = Si on utilise le caractère : seul, ça veut dire prendre tous les indices possibles. Exemple : >> M(1:2,:) ans = C est bien pratique pour extraire des lignes ou des colonnes d une matrice. Par exemple pour obtenir la deuxième ligne de M : >> M(2,:) ans = III.8 Construction de tableaux par blocs Vous connaissez ce principe en mathématiques. Par exemple, à partir des matrices et vecteurs précédemment définis, on peut définir la matrice (4x4) 14
 >> M = [1 2 3;11 12 13;21 22 23] >> M(1:2,2:3)% permet d extraire la matrice M=[2,3 ;12,13] ans = 2 3 12 13 Si on utilise le")
17 Pour faire ça sous Matlab, on fait comme si les blocs étaient des scalaires, et on écrit : >> N=[M V U 0] N = Ou bien en utilisant le caractère ; >> N=[M V; U 0] Cette syntaxe est très utilisée pour allonger des vecteurs ou des matrices, par exemple si on veut ajouter une colonne à M, constituée par V : >> M=[M V] M = Si on veut lui ajouter une ligne, constituée par U : >> M = [M;U] M = III.9 Affichages alphanumériques et graphiques III.9.1 Affichage alphanumérique On peut afficher des chaînes de caractères dans la fenêtre de commande : >> disp(pi vaut 3.142) 15
![constituée par V : >> M=[M V] M = 1 2 3 11 11 12 13 12 21 32 23 13 Si on veut lui ajouter une ligne, constituée par U : >> M = [M;U] M = 1 2 3 11 12 13 21 32 23 1 2 3](/docs-images/40/1342556/images/page_17.jpg "III.9 Affichages alphanumériques et graphiques III.9.1 Affichage alphanumérique On peut afficher des chaînes de caractères dans la fenêtre de commande : >> disp(pi vaut 3.")
18 Les fonctions sprintf et fprintf existe également (même syntaxe qu'en langage C). >> fprintf('pi vaut %f\n',pi) pi vaut On peut aussi demander des valeurs à l'utilisateur : >> var = input('nombre d''itération de l''algorithme : '); Matlab affichera la chaîne de caractère entrée en paramètre et attendra une réponse de l'utilisateur. III.9.2 Affichages graphiques 2D Matlab permet un grand nombre de types d'affichage 2D et 3D, seuls les plus courants seront décrits ici. Utiliser help et les autres commandes d aide pour affiner vos connaissances et vos graphismes. La commande plot permet l'affichage d'une courbe 2D : >>clear all ;clc >> t= -pi:0.01:pi; % l intervalle de temps >>y = sin(t);z=cos(t) ; >>figure(1) %Ouvrir une figure numéro 1 >>plot(t,y) % Tracer la fonction y en fonction de t dans l'intervalle [-π,π] avec un pas %de >>hold on %Maintenir le graphe courant >>plot(t,z) % tracer la fonction z en fonction de x dans le même graphe >>title( Fonctions sin et cos ) % Afficher le titre du graphe >>xlabel('temps'); ylabel('y,z') % Définir les axes x et y >>grid %Affiche un quadrillage sur la courbe >>legend( sinus, cosinus ) % Afficher les légendes de x et y >>hold off %Pour revenir en mode normal >>figure (2) %Ouvrir une figure numéro 2 >>plot(x,sin(x),x,cos(x), r-. ) %Tracer deux courbe(sin(x) et cons(x) dans la même %figure(2) >>legend( cosinus, sinus, racine ) >>clf % effacer le fenêtre graphique et annule toutes les commandes de traçage (plot) 16

19 On peut tracer la courbe en semilog ou en log avec les fonctions semilogx, semilogy et loglog. Pour attribuer des couleurs ou des styles du trait et des points de traçage des courbes vous taper help plot pour avoir de l aide. >> plot(x,cos(x), :,x,sin(x), r-.,x,sqrt(x), g-- ) Remarque: Les commandes gtext et text permettent le positionnement et l écriture dans la zone graphique. >>gtext({'this is the first line','this is the second line'}) L instruction axis ([xmin xmax ymin ymax]) permet de définir les dimensions des axes x et y >> axis ([-pi pi 0 10]) Afficher plusieurs graphiques (subplot) On peut effectuer plusieurs affichages sur une même figure en utilisant la commande subplot qui subdivise la fenêtre graphique. Sa syntaxe est : subplot(nombre_lignes,nombre_colonnes,numéro_subdivision) Les subdivisions sont numérotés de 1 à nombre_lignes*nombre_colonnes, de la gauche vers la droite puis de haut en bas. Exemple : >> subplot(3,2,1) >> plot(x,y) >> subplot(3,2,2) >> plot(x,y.^2)
 L instruction axis ([xmin xmax ymin ymax]) permet de définir les dimensions des axes x et y >> axis ([-pi pi 0 10]) Afficher plusieurs")
20 III.10 Instructions de contrôle Comme dans la plupart des langages il existe des instructions de contrôle de la forme for, while ou if. Instructions conditionnelles if if condition logique instructions ; elseif condition logique instructions ;... else instructions end Structures de contrôle boucles for for variable = valeur début: pas: valeur fin instructions ; end Structures de contrôle boucles while while condition logique instructions ; end III.11 Fichier Scripts Il est parfois (souvent) souhaitable, pour ne pas avoir à taper plusieurs fois une même séquence d'instructions, de la stocker dans un fichier. Ainsi on pourra réutiliser cette séquence dans une autre session de travail. Un tel fichier est dénommé script. Il suffit d''ouvrir un fichier avec le menu file, new, et de taper la séquence de commande dans ce script ensuite sauvegarder le fichier avec une extension ".m " (nom_fich.m). En tapant le nom du fichier sous Matlab (Workspace), la suite d'instructions s'exécute. Les variables définies dans l'espace de travail sont accessibles pour le script. De même les variables définies (ou modifiées) dans le script sont accessibles dans l'espace de travail. On peut (doit) mettre des commentaires à l'aide du caractère " % ". Toute commande située après "% " n'est pas prise en compte par Matlab, jusqu'à la ligne suivante. 18
 souhaitable, pour ne pas avoir à taper plusieurs fois une même séquence d'instructions, de la stocker dans un fichier.")
 qui viennent compléter le logiciel")
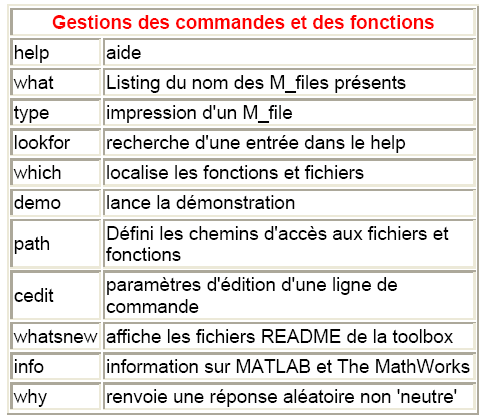
21 IV. Résumé des commandes MatLab On a regroupé par sujet d'intérêt les différentes commandes et fonctions de MatLab. Il en existe d'autres que l'on pourra trouver dans les différentes boîtes à outils (toolbox) qui viennent compléter le logiciel de base. 19
22 20
23 TP N 4: Analyse temporelle d un système dynamique du 1 er ordre I. Objectifs du TP L étudiant, après une étude théorique des systèmes proposés (1 er ordre), devra réaliser un fichier exécutable sous Matlab afin d analyser les réponses de ces systèmes à des entrées différentes et de déterminer leurs performances. Remarque : Pour la programmation Matlab utiliser les fonctions indiquées ci-dessous en plus des autres instructions étudiées précédemment. Soit un système du 1 er k ordre dont la fonction de transfert est Ts (). 1 s %%%%%%%% Analyse temporelle d un système de 1 er ordre %%%%%%%%%%%%%%%%%%%%% t=init:pas:fin ; % Définir un vecteur de fin points linéairement % espacé d un pas entre init et fin %Détermination de fonction de transfert num=[ k ] ;den=[ 1] ; sys=tf(num,den) ; % Création de la fonction de transfert %Réponse impulsionnelle d un système de premier ordre y1=impulse(sys,t) ; % Réponse à une impulsion unité figure(1) % Ouverture d une figure plot(t,y1) %Traçage de la réponse impulsionnelle %Réponse indicielle d un système de premier ordre y2=step(sys,t) % Réponse indicielle du système figure(2) plot(t,y2) ; %Détermination de la constante de temps graphiquement (tau) à partir de la réponse indicielle hold on ym=max(y2 ) ; yt=0.63*ym ; max_idx=min(find(y2>=yt)) ; tau=t(max_idx) ; plot([tau tau],[0 yt], m-- ) str=sprintf( tau=\n%3.2f s,tau) gtext (str) hold off %Maintenir les graphes courants % Détermine la valeur maximale de y2(rep.indicielle) % Détermine la valeur de yt correspondante au temps de réponse % find : permet de trouver l indice de l élément auquel y2>=yt % tau est le temps correspondant à cet indice dans le vecteur t % Tracer une ligne verticale à tr % Créer l étiquette volante % Permet de cliquer dans la fenêtre pour positionner le texte %Réponse à une rampe d un système de premier ordre u=a*t ; %Détermination de la rampe u de pente a y3=lsim(sys,u,t) % Réponse du système à une entrée u quelconque (t :temps) figure(3) plot(t,y3) ; 21
24 II. Etudes théoriques Soit le circuit RC donné par Fig.1, avec E 40 V, R 50 et C 63F(les conditions initiales sont nulles) Fig.1. Circuit RC On Considère la tension v 1 comme entrée et (), et la tension v2 comme sortie st (). 1. Etablir l équation différentielle qui régit le fonctionnement de ce circuit en appliquant la loi de Kirchhoff des tensions. 2. Donner la fonction de transfert de ce système. 3. Calculer la constante de temps et le gain statique correspondant au système. 4. Déterminer la réponse du système à l application d un échelon d amplitude E 0. Tracer cette réponse d une façon succincte. Calculer le temps de montée et le temps de réponse. 5. Déterminer la réponse du système à l application d une rampe de pente a. Tracer cette réponse d une façon succincte. Calculer l erreur de trainage (erreur de vitesse). 6. Tracer la réponse du système lorsque nous appliquons une impulsion, e( t) E0. ( t) comme entrée du système. III. Analyse sous Matlab En se basant sur le programme donné ci-dessus, écrire un fichier Matlab permettant de : a. Calculer la fonction de transfert du circuit RC donné par Fig.1 ; b. Tracer sa réponse à une impulsion unité ; c. Tracer sa réponse indicielle à un échelon e(t)=1 ; d. Retrouver graphiquement la constante de temps tau à 63% de la réponse indicielle ; e. Calculer le temps de montée et le temps de réponse. Afficher les dans la commande Windows et sur la figure de la réponse indicielle ; f. Faites varier la constante de temps ( , , ) du système et tracer les réponses indicielles correspondantes dans la même figure. 22
25 Faite vos conclusion sur l influence de la constante de temps sur les allures obtenues ; g. Tracer la réponse du système à une rampe de pente a 2, et reprendre le même travail (étapes f). Calculer l erreur de trainage ; Commenter votre fichier Matlab et donner vos conclusions. 23
26 TP N 5: Analyse temporelle d un système dynamique du 2 ème ordre I. Objectifs du TP II. L objectif de ce TP est d exploiter les connaissances acquises, pendant le cours sur l analyse temporelle d un système dynamique du 2 eme ordre. L étudiant, après une étude théorique des systèmes proposés, devra d abord réaliser un fichier exécutable sous Matlab afin d analyser les réponses de ces systèmes à des entrées différentes et de déterminer leurs performances. La représentation d un modèle sous Simulink va permettre ensuite de visualiser les réponses du système étudié. Rappels théoriques Soit un système du 2 eme ordre dont la fonction de transfert est donnée par : S() t Ts () Et () s w Avec k : est le gain statique du système. w n : est la pulsation naturelle(en rad/s). : est le coefficient d amortissement. 2 2 n k 2 s 1 w n III. Etudes théoriques Exemple 1 : On considère le circuit RLC série alimenté par une source de tension continue v () t 1 (Fig.1), avec R 20, L 3 mh, et C 5F (les conditions initiales sont nulles). Fig.1. Circuit RLC On Considère la tension v () 1 t comme entrée et () et la tension v () 2 t comme sortie st (). 1. Déterminer la fonction de transfert de ce système (réseau électrique) ; 2. Mettre l équation trouvée sous la forme de l équation (1), et définir chaque terme ( wn,, k) en fonction des éléments constitutifs du circuit RLC. 3. Donner les réponses du système à un échelon unitaire, à une rampe de pente a=2 et à une impulsion unité. 24
27 Exemple 2 : On considère le système mécanique donné par (Fig.2). L application d une force f() t (entrée du système) sur le système provoque des oscillations de la masse m suivant la direction xt ()(la sortie du système). Le système est constitué, en plus de la masse m, d un ressort de raideur k et d un amortisseur de coefficient b. Fig.2. Système mécanique en vibration Fig.3. Réponse indicielle du système mécanique L équation différentielle correspondante à ce système est la suivante : 1. Déterminer la fonction de transfert de ce système ; mx bx kx f (2) 2. A partir de la Fig.3, illustrant la réponse du système à un échelon f ( t) 2 N. m, déterminer les valeurs numériques des paramètres du système ( k, m, b). Note : le dépassement D 9,5% correspondant à un amortissement 0,6. IV. Exemple 1 : Analyse sous Matlab 1. Ecrire un programme sous un fichier Matlab, nommé tp3_1.m, qui permet de : a. Déterminer la fonction de transfert du circuit donné par Fig.1 b. Tracer sa réponse à une impulsion unité ; c. Tracer sa réponse indicielle à un échelon unitaire; c1. Déterminer et afficher les performances du circuit ( t,, t, t, D, ) et indiquer r m p les sur la figure correspondante. c2. Pour qu elle valeur de R a-t-on 1 (amortissement critique) ; c3. Pour R= 0, 20, 60 Ω, tracer dans une même figure les trois réponses du système à un échelon unitaire et indiquer la valeur de pour chaque courbe. d. Tracer la réponse du système à une rampe pour R 60. d1. Trouver l erreur de trainage du système. 2. Commenter votre fichier Matlab et donner vos conclusions. 25
28 Exemple 2 : 1. Ecrire un programme sous un fichier Matlab, nommé tp3_2.m, qui permet de : a. Déterminer la fonction de transfert du système mécanique donné par Fig.2 b. Tracer sa réponse à une impulsion unité ; c. Tracer sa réponse indicielle à un échelon f ( t) 2 N. m; c1. Déterminer et afficher les performances du système ( t,, t, t, D, ) et r m p indiquer les sur la figure correspondante. c2. Tracer la réponse indicielle dans la même figure pour 1,0.4,0.7. Indiquer sur cette figure la valeur de pour chaque courbe. d. Tracer la réponse du système à une rampe de pente 2 ; d1. Trouver l erreur de trainage du système. 2. Commenter votre fichier Matlab et donner vos conclusions. V. Analyse sous Simulink Dans Simulink représenter le processus de l Exemple 2 par le bloc Transfer Fcn. Sauvegarder le sous le nom tp3.mdl 1. Observer sur l oscilloscope l évolution de sa réponse à un échelon d amplitude 5, lorsque le paramètre d amortissement b varie. Pour cela, affecter le numérateur et le dénominateur avec les valeurs littérales :1 ket m k, b / k,1. 2. Dans un fichier Matlab script, sauvegarder sous le nom tp3param, écrire les paramètres du système : k 3 et m 5 qui resteront fixes et b 2 qui sera modifié avant chaque simulation, à savoir : b 2 puis b 4, puis Dans command windows du Matlab, taper tp3param puis lancer la simulation après avoir choisi les paramètres de simulation : solver ode45, la durée de simulation (20s) et Diagnostic : Automatic solver parameter selection, none. Observer les résultats dans l oscilloscope et tirer les performances du système. 4. De manière similaire laisser k 3 et b 3, mais faire évoluer la masse m de 2.5 à 5. Expliquer les résultats obtenus. 5. Changer l entré échelon par une rampe de pente 2 et visualiser les résultats. 26
29 TP N 6: Analyse fréquentielle, stabilité et asservissement d un système asservi I. Objectifs du TP Observer et analyser la réponse fréquentielle d un système asservi en utilisant les différentes présentations graphique : le plan de Bode et de Nyquist; Etudier la stabilité d un système asservi en se basant sur son comportement fréquentielle en boucle ouvert et en utilisant le critère de Routh en cas de boucle fermée ; Améliorer les performances d un système asservi en faisant une régulation Proportionnelle, Intégrale, Dérivée (correcteur PID) qui réunit les trois avantages, à savoir, la rapidité, la stabilité, et la précision. II. Rappels théoriques Lieux de transfert d un système dynamique linéaire Considérons un système linéaire d ordre quelconque avec une entrée sinusoïdale ( 0 e( t) E sin( t) ) et une sortie ( s( t) S0 sin( t ) ). L analyse harmonique (fréquentielle) de ce système consiste à faire le lien entre la fonction de transfert et la réponse de ce système à une sinusoïdale. Cette réponse sera caractérisée par S0 deux paramètres : Gain dephasage : E 0 Ces deux paramètres dépendent de la pulsation de l'entrée : S E 0 0 T( j) arg( T( j)) (1) Où T( j ) est l'expression de la fonction de transfert du système dans laquelle on remplace la variable de Laplace s par j. Il existe trois types de représentation graphique du gain et du déphasage, Equ.1, en fonction de la pulsation : BODE se présente sous la forme de deux courbes : T( j) db en fonction de (abscisses logarithmiques) : T( j) 20log T( j) (2) db 27
30 arg( T( j)) en fonction de (abscisses logarithmiques). BLACK aussi appelé NICHOLS représente T( j ) db en fonction de. La courbe est graduée en. NYQUIST représente T( j) dans le plan complexe. La courbe est graduée en. Evaluation de la stabilité d un système dynamique linéaire en régime sinusoïdale Cette partie montre que nous pouvons prévoir la stabilité d un système en BF à partir de la représentation graphique du gain et du déphasage en BO. Le critère graphique consiste à étudier la position de la courbe de la réponse harmonique en BO par rapport au point critique définie par T( j) 1 0dB Arg( T ( j)) 180 (3) pour évaluer la stabilité de l'asservissement (boucle fermée). Pour que la stabilité d'un système asservi soit assurée en toutes circonstances (perturbations comprises), il faut que sa courbe de réponse harmonique en BO passe suffisamment loin du point critique. Les valeurs couramment admises pour assurer une stabilité suffisante sont : Marge de gain Gm : 8 à 12 db Marge de phase Pm : de 30 à 45. Ces marges de stabilité peuvent être lues directement dans les différents plans (Bode, Black). Critère du revers dans le plan de Nyquist Un système asservi linéaire est stable si en décrivant le lieu de Nyquist en BO dans le sens des fréquences croissantes, on laisse le point critique à sa gauche. Règle du revers dans le plan de Bode Soit 0 la pulsation pour laquelle la courbe de gain coupe l'axe 0dB et c la pulsation pour laquelle la courbe des phase passe par 180. L'asservissement est stable si 0 c. Remarque : un système instable n'a pas de marge de stabilité. Les commande Matlab utilisés dans ce Tp Pour ce Tp vous pouvez utiliser les fonctions indiquées ci-dessus. Opération sur les fonctions de transfert : Il est possible d assembler deux systèmes T () 1 T () 2 s de fonctions de transferts 28 num1 num2 num T1 () s, T2 () s et soit Ts () la fonction de transfert équivalente. den1 den2 den Si les deux systèmes T () s et 1 T () 2 s sont en séries num, den series( num1, den1, num2, den2) ou T T1 * T2
31 Si les deux systèmes T () s et 1 T () 2 s sont en parallèle num, den parallel( num1, den1, num2, den2) ou T T1 T2 Systèmes asservis avec un retour non unitaire num, den feedback ( num1, den1, num2, den2, 1) ou T feedback( T1, T2, 1) On met +1 si le retour est positif si non on met -1. Systèmes asservis avec un retour unitaire num, den feedback ( num1, den1,1,1, 1) ou T feedback( T1,1, 1) Les fonctions correspondantes à la réponse fréquentielle de la fonction T(s) : % Le tracé de diagramme de Bode d un système T(s) T=tf(num,den); % Fonction de transfert de T bode (num,den) % ou bode(t) grid on % Le calcul des marges de stabilité (gain et phase) à partir de diagramme de Bode [gain,phase,w]=bode(t); [MG,MP,wpi,wc]=margin(gain,phase,w); % Ces marges sont indiquées sur le tracé de Bode à l aide de margin(gain,phase,w) %Le tracé de Nyquist s obtient nyquist(t) %ou [Re,Im]=Nyquist(T) grid on Autres fonctions Matlab qui aide à déduire la stabilité du système T : roots(den) % Permet de définir les pôles du système T [z,p,k]=zpkdata(proc); % Déterminer les zéros, les pôles et le gain de T p{1,1} % Définir le vecteur des pôles pzmap(t); % Placer les pôles et les zéros dans le plan complexe III. Exemple 1 : Etudes théoriques Un système du 1 er ordre s écrit de manière générale. k Ts () (4) 1 s Avec k gain statique, : constante de temps 1. Déterminer la fonction de transfert de ce système en boucle fermée (retour unitaire); 2. Dans quels cas ce système peut il être stable en boucle ouverte et en boucle fermée (critère de Routh) ; 29
32 3. Donner l expression du gain complexe et décibel de Ts () pour k 10 et 1, et déduire la pulsation de coupure c ; 4. Tracer alors les allures des courbes dans le diagramme de Bode et Nyquist correspondant au système et en BO. Retrouver les valeurs de k et ; 5. Déterminer les marges de stabilité à partir du tracé de Bode. Exemple 2 : Soit le système donné par le schéma suivant, Fig.1: Xs () Ts () Ys () Fig.1 Schéma fonctionnel du système en Boucle fermée. Avec k Ts () s(1 T s)(1 T s) 1 2 (5) Ce système possède une intégration (pôle à l origine). Il est de classe 1. on donne T1 0.5s et T s. 2 1 Ce système est inclus dans une boucle unitaire, munie d un correcteur Cs, () Fig.2 : Xs () Cs () Ts () Ys () Fig.2 Schéma fonctionnel du système avec contrôleur en boucle fermée. On envisage un correcteur PID pour un bon suivi à une consigne variable, on désire en effet une erreur nulle (en régime permanent) à une consigne qui varie en rampe. Le correcteur PID a pour fonction de transfert : kc Cs () (1 1/ T s 1/ T s) (6) On prendra d ailleurs T T / 4 (valeur courante adoptée par Ziegler Nichols). d i 1. Déterminer la fonction de transfert du système Tsen () BF en fonction de k ; i 2. Etudier et discuter la stabilité du système Tsen () BF en utilisant le critère de Routh et cela suivant la valeur du gain k ; d 30
33 3. On donne k 2, kc 0.8etTi 8, déterminer la fonction de transfert du système ( C( s) T( s)) en BF ; IV. Analyse sous Matlab Comparez les résultats obtenus lors de l étude théorique avec l analyse faite sous Matlab. Exemple 1 : 1. Ecrire fichier Matlab, nommé tp4_1.m permettant de : a. Déterminer la fonction de transfert Tsen () BO et en BF (retour unitaire); b. Déterminer les pôles du système et déduire sa stabilité; c. Tracer le diagramme de Bode et Nyquist en BO, et en BF (retour unitaire); 2. Commenter votre fichier Matlab ; 3. Donner vos remarques et conclusions à partir des résultats acquises. Exemple 2 : 1. Ecrire un fichier Matlab, nommé tp4_2.m permettant de: a- Analyser le système Ts () donné par Fig.1 (sans correcteur) : a.1. Déterminer sa fonction de transfert en BO et en BF (retour unitaire); a.2. Déterminer les pôles, les zéros et le gain du système en utilisant la fonction Matlab zpkdata ; a.3. Analyser les pôles et les zéros du système en utilisant la fonction Matlab pzmap, et déduire sa stabilité ; a.4. Tracer le diagramme de Bode et Nyquist du système en BO ; a.5. Déterminer les marges de stabilité correspondantes. Discuter et comparer les résultats obtenus. b- Analyser le système ( C( s) T( s)) donné par Fig.2 (avec correcteur) : b.1. Déterminer sa fonction de transfert en BO et en BF (retour unitaire); 31
34 b.2. Analyser les pôles et les zéros du système en utilisant la fonction Matlab pzmap, et déduire sa stabilité ; b.3. Tracer le diagramme de Bode et Nyquist en BO (retour unitaire); b.4. Déterminer les marges de stabilité, discuter et comparer les résultats obtenus. c- Comparer les résultats obtenues de a et b pour le système Tsavec () et sans correcteur en BF : c.1. Tracer dans la même figure les réponses indicielles (échelon unitaire) du système en BF avant et après correction. Analyser les résultats et spécifier les changements (performances) que le correcteur a apporté au système. c.2. Tracer dans la même figure les réponses du système en BF à une rampe de pente a=1, avant et après correction. Analyser les résultats et vérifier que l erreur statique en régime permanent est nulle. 2. Commenter votre fichier Matlab ; 3. Donner vos remarques et conclusions à partir des résultats acquises. 32
3.2. Matlab/Simulink. 3.2.1. Généralités
 3.2. Matlab/Simulink 3.2.1. Généralités Il s agit d un logiciel parfaitement dédié à la résolution de problèmes d'analyse numérique ou de traitement du signal. Il permet d'effectuer des calculs matriciels,
3.2. Matlab/Simulink 3.2.1. Généralités Il s agit d un logiciel parfaitement dédié à la résolution de problèmes d'analyse numérique ou de traitement du signal. Il permet d'effectuer des calculs matriciels,
Automatique Linéaire 1 Travaux Dirigés 1A ISMIN
 Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Automatique Linéaire 1 Travaux Dirigés Travaux dirigés, Automatique linéaire 1 J.M. Dutertre 2014 TD 1 Introduction, modélisation, outils. Exercice 1.1 : Calcul de la réponse d un 2 nd ordre à une rampe
Calcul Formel et Numérique, Partie I
 Calcul Formel et Numérique N.Vandenberghe [email protected] Table des matières 1 Introduction à Matlab 2 1.1 Quelques généralités.......................... 2 2 Où trouver des informations 2 3 Opérations
Calcul Formel et Numérique N.Vandenberghe [email protected] Table des matières 1 Introduction à Matlab 2 1.1 Quelques généralités.......................... 2 2 Où trouver des informations 2 3 Opérations
Petite introduction à l utilisation de Matlab/Simulink pour l Automatique
 Petite introduction à l utilisation de Matlab/Simulink pour l Automatique Ces quelques pages sont consacrées à l'illustration des cours d'automatique (asservissements linéaires continus) à l'aide du logiciel
Petite introduction à l utilisation de Matlab/Simulink pour l Automatique Ces quelques pages sont consacrées à l'illustration des cours d'automatique (asservissements linéaires continus) à l'aide du logiciel
Automatique Linéaire 1 1A ISMIN
 Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Automatique linéaire 1 J.M. Dutertre 2014 Sommaire. I. Introduction, définitions, position du problème. p. 3 I.1. Introduction. p. 3 I.2. Définitions. p. 5 I.3. Position du problème. p. 6 II. Modélisation
Introduction à MATLAB R
 Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
Introduction à MATLAB R Romain Tavenard 10 septembre 2009 MATLAB R est un environnement de calcul numérique propriétaire orienté vers le calcul matriciel. Il se compose d un langage de programmation, d
Notions d asservissements et de Régulations
 I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
I. Introduction I. Notions d asservissements et de Régulations Le professeur de Génie Electrique doit faire passer des notions de régulation à travers ses enseignements. Les notions principales qu'il a
MATLAB : COMMANDES DE BASE. Note : lorsqu applicable, l équivalent en langage C est indiqué entre les délimiteurs /* */.
 Page 1 de 9 MATLAB : COMMANDES DE BASE Note : lorsqu applicable, l équivalent en langage C est indiqué entre les délimiteurs /* */. Aide help, help nom_de_commande Fenêtre de travail (Command Window) Ligne
Page 1 de 9 MATLAB : COMMANDES DE BASE Note : lorsqu applicable, l équivalent en langage C est indiqué entre les délimiteurs /* */. Aide help, help nom_de_commande Fenêtre de travail (Command Window) Ligne
Analyse des Systèmes Asservis
 Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Analyse des Systèmes Asservis Après quelques rappels, nous verrons comment évaluer deux des caractéristiques principales d'un système asservi : Stabilité et Précision. Si ces caractéristiques ne sont pas
Chapitre 1 Régime transitoire dans les systèmes physiques
 Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Chapitre 1 Régime transitoire dans les systèmes physiques Savoir-faire théoriques (T) : Écrire l équation différentielle associée à un système physique ; Faire apparaître la constante de temps ; Tracer
Donner les limites de validité de la relation obtenue.
 olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
olutions! ours! - Multiplicateur 0 e s alculer en fonction de. Donner les limites de validité de la relation obtenue. Quelle est la valeur supérieure de? Quel est le rôle de 0? - Multiplicateur e 0 s alculer
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.
 PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
PRECISION - REJET DE PERTURBATIONS T.D. G.E.I.I.. Donner les erreurs en position, en vitesse et en accélération d un système de transfert F BO = N(p) D(p) (transfert en boucle ouverte) bouclé par retour
SYSTEMES LINEAIRES DU PREMIER ORDRE
 SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
SYSTEMES LINEIRES DU PREMIER ORDRE 1. DEFINITION e(t) SYSTEME s(t) Un système est dit linéaire invariant du premier ordre si la réponse s(t) est liée à l excitation e(t) par une équation différentielle
Oscillations libres des systèmes à deux degrés de liberté
 Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
Chapitre 4 Oscillations libres des systèmes à deux degrés de liberté 4.1 Introduction Les systèmes qui nécessitent deux coordonnées indépendantes pour spécifier leurs positions sont appelés systèmes à
A. N(p) B + C p. + D p2
 B + C p. + D p2") Polytech Nice ELEC3 T.P. d'electronique TP N 7 S ACTIFS DU SECOND ORDRE 1 - INTRODUCTION Un quadripôle est dit avoir une fonction de transfert en tension, du second ordre, lorsque le rapport tension de
Polytech Nice ELEC3 T.P. d'electronique TP N 7 S ACTIFS DU SECOND ORDRE 1 - INTRODUCTION Un quadripôle est dit avoir une fonction de transfert en tension, du second ordre, lorsque le rapport tension de
Calcul Formel et Numérique, Partie I
 Calcul Formel et Numérique NicolasVandenberghe [email protected] Table des matières 1 Introduction à Matlab 2 1.1 Quelques généralités.......................... 2 1.2 Où trouver des informations......................
Calcul Formel et Numérique NicolasVandenberghe [email protected] Table des matières 1 Introduction à Matlab 2 1.1 Quelques généralités.......................... 2 1.2 Où trouver des informations......................
TD1 Signaux, énergie et puissance, signaux aléatoires
 TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TD1 Signaux, énergie et puissance, signaux aléatoires I ) Ecrire l'expression analytique des signaux représentés sur les figures suivantes à l'aide de signaux particuliers. Dans le cas du signal y(t) trouver
TP 7 : oscillateur de torsion
 TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
TP 7 : oscillateur de torsion Objectif : étude des oscillations libres et forcées d un pendule de torsion 1 Principe général 1.1 Définition Un pendule de torsion est constitué par un fil large (métallique)
CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT
 TP CIRCUITS ELECTRIQUES R.DUPERRAY Lycée F.BUISSON PTSI CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT OBJECTIFS Savoir utiliser le multimètre pour mesurer des grandeurs électriques Obtenir expérimentalement
TP CIRCUITS ELECTRIQUES R.DUPERRAY Lycée F.BUISSON PTSI CARACTERISTIQUE D UNE DIODE ET POINT DE FONCTIONNEMENT OBJECTIFS Savoir utiliser le multimètre pour mesurer des grandeurs électriques Obtenir expérimentalement
Algorithmique avec Algobox
 Algorithmique avec Algobox 1. Algorithme: Un algorithme est une suite d instructions qui, une fois exécutée correctement, conduit à un résultat donné Un algorithme doit contenir uniquement des instructions
Algorithmique avec Algobox 1. Algorithme: Un algorithme est une suite d instructions qui, une fois exécutée correctement, conduit à un résultat donné Un algorithme doit contenir uniquement des instructions
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations
 Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Exemple d acquisition automatique de mesures sur une maquette de contrôle actif de vibrations Valérie Pommier-Budinger Bernard Mouton - Francois Vincent ISAE Institut Supérieur de l Aéronautique et de
Cours de Systèmes Asservis
 Cours de Systèmes Asservis J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq Polytech Tours 2 Chapitre 1 Introduction 1.1 Définition de l automatique Automatique : Qui fonctionne tout seul ou sans intervention
Cours de Systèmes Asservis J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq Polytech Tours 2 Chapitre 1 Introduction 1.1 Définition de l automatique Automatique : Qui fonctionne tout seul ou sans intervention
Module : systèmes asservis linéaires
 BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
BS2EL - Physique appliquée Module : systèmes asservis linéaires Diaporamas : les asservissements Résumé de cours 1- Structure d un système asservi 2- Transmittances en boucle ouverte et ermée 3- Stabilité
Séance 0 : Linux + Octave : le compromis idéal
 Séance 0 : Linux + Octave : le compromis idéal Introduction Linux est un système d'exploitation multi-tâches et multi-utilisateurs, basé sur la gratuité et développé par une communauté de passionnés. C'est
Séance 0 : Linux + Octave : le compromis idéal Introduction Linux est un système d'exploitation multi-tâches et multi-utilisateurs, basé sur la gratuité et développé par une communauté de passionnés. C'est
Charges électriques - Courant électrique
 Courant électrique Charges électriques - Courant électrique Exercice 6 : Dans la chambre à vide d un microscope électronique, un faisceau continu d électrons transporte 3,0 µc de charges négatives pendant
Courant électrique Charges électriques - Courant électrique Exercice 6 : Dans la chambre à vide d un microscope électronique, un faisceau continu d électrons transporte 3,0 µc de charges négatives pendant
Instruments de mesure
 Chapitre 9a LES DIFFERENTS TYPES D'INSTRUMENTS DE MESURE Sommaire Le multimètre L'oscilloscope Le fréquencemètre le wattmètre Le cosphimètre Le générateur de fonctions Le traceur de Bodes Les instruments
Chapitre 9a LES DIFFERENTS TYPES D'INSTRUMENTS DE MESURE Sommaire Le multimètre L'oscilloscope Le fréquencemètre le wattmètre Le cosphimètre Le générateur de fonctions Le traceur de Bodes Les instruments
LABO 5 ET 6 TRAITEMENT DE SIGNAL SOUS SIMULINK
 LABO 5 ET 6 TRAITEMENT DE SIGNAL SOUS SIMULINK 5.1 Introduction Simulink est l'extension graphique de MATLAB permettant, d une part de représenter les fonctions mathématiques et les systèmes sous forme
LABO 5 ET 6 TRAITEMENT DE SIGNAL SOUS SIMULINK 5.1 Introduction Simulink est l'extension graphique de MATLAB permettant, d une part de représenter les fonctions mathématiques et les systèmes sous forme
Mini_guide_Isis.pdf le 23/09/2001 Page 1/14
 1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
1 Démarrer...2 1.1 L écran Isis...2 1.2 La boite à outils...2 1.2.1 Mode principal...3 1.2.2 Mode gadgets...3 1.2.3 Mode graphique...3 2 Quelques actions...4 2.1 Ouvrir un document existant...4 2.2 Sélectionner
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique...
 1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
1 Démarrer... 3 1.1 L écran Isis...3 1.2 La boite à outils...3 1.2.1 Mode principal... 4 1.2.2 Mode gadget...4 1.2.3 Mode graphique... 4 2 Quelques actions... 5 2.1 Ouvrir un document existant...5 2.2
Concours EPITA 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette BMW K1200S
 Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Concours EPIT 2009 Epreuve de Sciences Industrielles pour l ingénieur La suspension anti-plongée de la motocyclette MW K1200S Durée : 2h. Calculatrices autorisées. Présentation du problème Le problème
Précision d un résultat et calculs d incertitudes
 Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
Précision d un résultat et calculs d incertitudes PSI* 2012-2013 Lycée Chaptal 3 Table des matières Table des matières 1. Présentation d un résultat numérique................................ 4 1.1 Notations.........................................................
I Stabilité, Commandabilité et Observabilité 11. 1 Introduction 13 1.1 Un exemple emprunté à la robotique... 13 1.2 Le plan... 18 1.3 Problème...
 TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
TABLE DES MATIÈRES 5 Table des matières I Stabilité, Commandabilité et Observabilité 11 1 Introduction 13 1.1 Un exemple emprunté à la robotique................... 13 1.2 Le plan...................................
http://cermics.enpc.fr/scilab
 scilab à l École des Ponts ParisTech http://cermics.enpc.fr/scilab Introduction à Scilab Graphiques, fonctions Scilab, programmation, saisie de données Jean-Philippe Chancelier & Michel De Lara cermics,
scilab à l École des Ponts ParisTech http://cermics.enpc.fr/scilab Introduction à Scilab Graphiques, fonctions Scilab, programmation, saisie de données Jean-Philippe Chancelier & Michel De Lara cermics,
Initiation à la programmation en Python
 I-Conventions Initiation à la programmation en Python Nom : Prénom : Une commande Python sera écrite en caractère gras. Exemples : print 'Bonjour' max=input("nombre maximum autorisé :") Le résultat de
I-Conventions Initiation à la programmation en Python Nom : Prénom : Une commande Python sera écrite en caractère gras. Exemples : print 'Bonjour' max=input("nombre maximum autorisé :") Le résultat de
1. PRESENTATION DU PROJET
 Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Bac STI2D Formation des enseignants Jean-François LIEBAUT Denis PENARD SIN 63 : Prototypage d un traitement de l information analogique et numérique (PSoC) 1. PRESENTATION DU PROJET Les systèmes d éclairage
Mini_guide_Isis_v6.doc le 10/02/2005 Page 1/15
 1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
1 Démarrer... 2 1.1 L écran Isis... 2 1.2 Les barres d outils... 3 1.2.1 Les outils d édition... 3 1.2.2 Les outils de sélection de mode... 4 1.2.3 Les outils d orientation... 4 2 Quelques actions... 5
Cours 7 : Utilisation de modules sous python
 Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
Cours 7 : Utilisation de modules sous python 2013/2014 Utilisation d un module Importer un module Exemple : le module random Importer un module Exemple : le module random Importer un module Un module est
CABLECAM de HYMATOM. Figure 1 : Schéma du système câblecam et détail du moufle vu de dessus.
 CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
CABLECAM de HYMATOM La société Hymatom conçoit et fabrique des systèmes de vidéosurveillance. Le système câblecam (figure 1) est composé d un chariot mobile sur quatre roues posé sur deux câbles porteurs
La fonction exponentielle
 DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
DERNIÈRE IMPRESSION LE 2 novembre 204 à :07 La fonction exponentielle Table des matières La fonction exponentielle 2. Définition et théorèmes.......................... 2.2 Approche graphique de la fonction
MÉTHODES NUMERIQUES. Cours. Licence de Physique Année Universitaire : 2010-2011 Licence Chimie, parcours Physique. Semestre S3
 Licence de Physique Année Universitaire : 2010-2011 Licence Chimie, parcours Physique Semestre S3 Cours MÉTHODES NUMERIQUES Chargé du Cours : M. GAGOU Yaovi E-mail :[email protected] URL : http://www.u-picardie.fr/gagou
Licence de Physique Année Universitaire : 2010-2011 Licence Chimie, parcours Physique Semestre S3 Cours MÉTHODES NUMERIQUES Chargé du Cours : M. GAGOU Yaovi E-mail :[email protected] URL : http://www.u-picardie.fr/gagou
MEGA ITSM Accelerator. Guide de Démarrage
 MEGA ITSM Accelerator Guide de Démarrage MEGA 2009 SP4 1ère édition (juin 2010) Les informations contenues dans ce document pourront faire l objet de modifications sans préavis et ne sauraient en aucune
MEGA ITSM Accelerator Guide de Démarrage MEGA 2009 SP4 1ère édition (juin 2010) Les informations contenues dans ce document pourront faire l objet de modifications sans préavis et ne sauraient en aucune
Equipement. électronique
 MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
MASTER ISIC Les générateurs de fonctions 1 1. Avant-propos C est avec l oscilloscope, le multimètre et l alimentation stabilisée, l appareil le plus répandu en laboratoire. BUT: Fournir des signau électriques
Premier ordre Expression de la fonction de transfert : H(p) = K
 = K") Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Premier ordre Expression de la fonction de transfert : H(p) = K + τ.p. K.e τ K.e /τ τ 86% 95% 63% 5% τ τ 3τ 4τ 5τ Temps Caractéristiques remarquables de la réponse à un échelon e(t) = e.u(t). La valeur
Filtres passe-bas. On utilise les filtres passe-bas pour réduire l amplitude des composantes de fréquences supérieures à la celle de la coupure.
 Filtres passe-bas Ce court document expose les principes des filtres passe-bas, leurs caractéristiques en fréquence et leurs principales topologies. Les éléments de contenu sont : Définition du filtre
Filtres passe-bas Ce court document expose les principes des filtres passe-bas, leurs caractéristiques en fréquence et leurs principales topologies. Les éléments de contenu sont : Définition du filtre
Aide - mémoire gnuplot 4.0
 Aide - mémoire gnuplot 4.0 Nicolas Kielbasiewicz 20 juin 2008 L objet de cet aide-mémoire est de présenter les commandes de base pour faire rapidement de très jolis graphiques et courbes à l aide du logiciel
Aide - mémoire gnuplot 4.0 Nicolas Kielbasiewicz 20 juin 2008 L objet de cet aide-mémoire est de présenter les commandes de base pour faire rapidement de très jolis graphiques et courbes à l aide du logiciel
Exercices Alternatifs. Une fonction continue mais dérivable nulle part
 Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copyleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copyleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
I- Définitions des signaux.
 101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
101011011100 010110101010 101110101101 100101010101 Du compact-disc, au DVD, en passant par l appareil photo numérique, le scanner, et télévision numérique, le numérique a fait une entrée progressive mais
Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN)
") 1/5 Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN) Objectifs : Reconnaître des signaux de nature analogique et des signaux de nature numérique Mettre en
1/5 Partie Agir : Défis du XXI ème siècle CHAP 20-ACT EXP Convertisseur Analogique Numérique (CAN) Objectifs : Reconnaître des signaux de nature analogique et des signaux de nature numérique Mettre en
Exercices Alternatifs. Une fonction continue mais dérivable nulle part
 Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
Eercices Alternatifs Une fonction continue mais dérivable nulle part c 22 Frédéric Le Rou (copleft LDL : Licence pour Documents Libres). Sources et figures: applications-continues-non-derivables/. Version
TP Modulation Démodulation BPSK
 I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
I- INTRODUCTION : TP Modulation Démodulation BPSK La modulation BPSK est une modulation de phase (Phase Shift Keying = saut discret de phase) par signal numérique binaire (Binary). La phase d une porteuse
Union générale des étudiants de Tunisie Bureau de l institut Préparatoire Aux Etudes D'ingénieurs De Tunis. Modèle de compte-rendu de TP.
 Union générale des étudiants de Tunisie Modèle de compte-rendu de TP Dipôle RC Ce document a été publié pour l unique but d aider les étudiants, il est donc strictement interdit de l utiliser intégralement
Union générale des étudiants de Tunisie Modèle de compte-rendu de TP Dipôle RC Ce document a été publié pour l unique but d aider les étudiants, il est donc strictement interdit de l utiliser intégralement
Le transistor bipolaire
 IUT Louis Pasteur Mesures Physiques Electronique Analogique 2ème semestre 3ème partie Damien JACOB 08-09 Le transistor bipolaire I. Description et symboles Effet transistor : effet physique découvert en
IUT Louis Pasteur Mesures Physiques Electronique Analogique 2ème semestre 3ème partie Damien JACOB 08-09 Le transistor bipolaire I. Description et symboles Effet transistor : effet physique découvert en
TP 1 Introduction à Matlab Février 2009
 1 Introduction TP 1 Introduction à Matlab Février 2009 Matlab pour «MATtrix LABoratory», est un logiciel qui a été conçu pour fournir un environnement de calcul numérique de haut niveau. Il est particulièrement
1 Introduction TP 1 Introduction à Matlab Février 2009 Matlab pour «MATtrix LABoratory», est un logiciel qui a été conçu pour fournir un environnement de calcul numérique de haut niveau. Il est particulièrement
Cours d électricité. Circuits électriques en courant constant. Mathieu Bardoux. 1 re année
 Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
Cours d électricité Circuits électriques en courant constant Mathieu Bardoux [email protected] IUT Saint-Omer / Dunkerque Département Génie Thermique et Énergie 1 re année Objectifs du chapitre
SOMMAIRE. 1. Préambule...2. 2. Le calendrier...2. 3. Trajectoire d un objet lancé...6. 4. Régression linéaire...9
 SOMMAIRE 1. Préambule...2 2. Le calendrier...2 3. Trajectoire d un objet lancé...6 4. Régression linéaire...9 5. Calcul de commissions par tranches...12 6. Base de données...16 7. Valeur cible...19 ATTENTION
SOMMAIRE 1. Préambule...2 2. Le calendrier...2 3. Trajectoire d un objet lancé...6 4. Régression linéaire...9 5. Calcul de commissions par tranches...12 6. Base de données...16 7. Valeur cible...19 ATTENTION
Expérience 3 Formats de signalisation binaire
 Expérience 3 Formats de signalisation binaire Introduction Procédures Effectuez les commandes suivantes: >> xhost nat >> rlogin nat >> setenv DISPLAY machine:0 >> setenv MATLABPATH /gel/usr/telecom/comm_tbx
Expérience 3 Formats de signalisation binaire Introduction Procédures Effectuez les commandes suivantes: >> xhost nat >> rlogin nat >> setenv DISPLAY machine:0 >> setenv MATLABPATH /gel/usr/telecom/comm_tbx
Erreur statique. Chapitre 6. 6.1 Définition
 Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
Chapitre 6 Erreur statique On considère ici le troisième paramètre de design, soit l erreur statique. L erreur statique est la différence entre l entrée et la sortie d un système lorsque t pour une entrée
LES TYPES DE DONNÉES DU LANGAGE PASCAL
 LES TYPES DE DONNÉES DU LANGAGE PASCAL 75 LES TYPES DE DONNÉES DU LANGAGE PASCAL CHAPITRE 4 OBJECTIFS PRÉSENTER LES NOTIONS D ÉTIQUETTE, DE CONS- TANTE ET DE IABLE DANS LE CONTEXTE DU LAN- GAGE PASCAL.
LES TYPES DE DONNÉES DU LANGAGE PASCAL 75 LES TYPES DE DONNÉES DU LANGAGE PASCAL CHAPITRE 4 OBJECTIFS PRÉSENTER LES NOTIONS D ÉTIQUETTE, DE CONS- TANTE ET DE IABLE DANS LE CONTEXTE DU LAN- GAGE PASCAL.
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA)
 Convertisseur Numérique Analogique (CNA)") La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
La conversion de données : Convertisseur Analogique Numérique (CAN) Convertisseur Numérique Analogique (CNA) I. L'intérêt de la conversion de données, problèmes et définitions associés. I.1. Définitions:
Initiation à LabView : Les exemples d applications :
 Initiation à LabView : Les exemples d applications : c) Type de variables : Créer un programme : Exemple 1 : Calcul de c= 2(a+b)(a-3b) ou a, b et c seront des réels. «Exemple1» nom du programme : «Exemple
Initiation à LabView : Les exemples d applications : c) Type de variables : Créer un programme : Exemple 1 : Calcul de c= 2(a+b)(a-3b) ou a, b et c seront des réels. «Exemple1» nom du programme : «Exemple
ÉVALUATION FORMATIVE. On considère le circuit électrique RC représenté ci-dessous où R et C sont des constantes strictement positives.
 L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
L G L G Prof. Éric J.M.DELHEZ ANALYSE MATHÉMATIQUE ÉALUATION FORMATIE Novembre 211 Ce test vous est proposé pour vous permettre de faire le point sur votre compréhension du cours d Analyse Mathématique.
Exercice 1. Exercice n 1 : Déséquilibre mécanique
 Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
Exercice 1 1. a) Un mobile peut-il avoir une accélération non nulle à un instant où sa vitesse est nulle? donner un exemple illustrant la réponse. b) Un mobile peut-il avoir une accélération de direction
URECA Initiation Matlab 2 Laurent Ott. Initiation Matlab 2
 Initiation Matlab 2 1 Chaînes de caractères (string) Une chaîne de caractères (string en anglais) est une suite ordonnée de caractères (du texte, par exemple). Sous matlab, les chaînes de caractères sont
Initiation Matlab 2 1 Chaînes de caractères (string) Une chaîne de caractères (string en anglais) est une suite ordonnée de caractères (du texte, par exemple). Sous matlab, les chaînes de caractères sont
Premiers pas avec Mathematica
 Premiers pas avec Mathematica LP206 : Mathématiques pour physiciens I Année 2010/2011 1 Introduction Mathematica est un logiciel de calcul formel qui permet de manipuler des expressions mathématiques symboliques.
Premiers pas avec Mathematica LP206 : Mathématiques pour physiciens I Année 2010/2011 1 Introduction Mathematica est un logiciel de calcul formel qui permet de manipuler des expressions mathématiques symboliques.
Chapitre 0 Introduction à la cinématique
 Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
Chapitre 0 Introduction à la cinématique Plan Vitesse, accélération Coordonnées polaires Exercices corrigés Vitesse, Accélération La cinématique est l étude du mouvement Elle suppose donc l existence à
ELEC2753 Electrotechnique examen du 11/06/2012
 ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
ELEC2753 Electrotechnique examen du 11/06/2012 Pour faciliter la correction et la surveillance, merci de répondre aux 3 questions sur des feuilles différentes et d'écrire immédiatement votre nom sur toutes
Trépier avec règle, ressort à boudin, chronomètre, 5 masses de 50 g.
 PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
PHYSQ 130: Hooke 1 LOI DE HOOKE: CAS DU RESSORT 1 Introduction La loi de Hooke est fondamentale dans l étude du mouvement oscillatoire. Elle est utilisée, entre autres, dans les théories décrivant les
CHAPITRE XIII : Les circuits à courant alternatif : déphasage, représentation de Fresnel, phaseurs et réactance.
 XIII. 1 CHAPITRE XIII : Les circuits à courant alternatif : déphasage, représentation de Fresnel, phaseurs et réactance. Dans les chapitres précédents nous avons examiné des circuits qui comportaient différentes
XIII. 1 CHAPITRE XIII : Les circuits à courant alternatif : déphasage, représentation de Fresnel, phaseurs et réactance. Dans les chapitres précédents nous avons examiné des circuits qui comportaient différentes
Présentation du langage et premières fonctions
 1 Présentation de l interface logicielle Si les langages de haut niveau sont nombreux, nous allons travaillé cette année avec le langage Python, un langage de programmation très en vue sur internet en
1 Présentation de l interface logicielle Si les langages de haut niveau sont nombreux, nous allons travaillé cette année avec le langage Python, un langage de programmation très en vue sur internet en
Transmission d informations sur le réseau électrique
 Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
Transmission d informations sur le réseau électrique Introduction Remarques Toutes les questions en italique devront être préparées par écrit avant la séance du TP. Les préparations seront ramassées en
SYSTÈMES ASSERVIS CORRECTION
 SYSTÈMES ASSERVIS CORRECTION //07 SYSTÈMES ASSERVIS CORRECTION ) Introduction... 3.) Les différents systèmes de commande... 3.2) Performances des systèmes asservis... 4.3) Fonction de transfert en boucle
SYSTÈMES ASSERVIS CORRECTION //07 SYSTÈMES ASSERVIS CORRECTION ) Introduction... 3.) Les différents systèmes de commande... 3.2) Performances des systèmes asservis... 4.3) Fonction de transfert en boucle
Sujet proposé par Yves M. LEROY. Cet examen se compose d un exercice et de deux problèmes. Ces trois parties sont indépendantes.
 Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Promotion X 004 COURS D ANALYSE DES STRUCTURES MÉCANIQUES PAR LA MÉTHODE DES ELEMENTS FINIS (MEC 568) contrôle non classant (7 mars 007, heures) Documents autorisés : polycopié ; documents et notes de
Chapitre 2 Les ondes progressives périodiques
 DERNIÈRE IMPRESSION LE er août 203 à 7:04 Chapitre 2 Les ondes progressives périodiques Table des matières Onde périodique 2 2 Les ondes sinusoïdales 3 3 Les ondes acoustiques 4 3. Les sons audibles.............................
DERNIÈRE IMPRESSION LE er août 203 à 7:04 Chapitre 2 Les ondes progressives périodiques Table des matières Onde périodique 2 2 Les ondes sinusoïdales 3 3 Les ondes acoustiques 4 3. Les sons audibles.............................
Projet de synthèse de l'électronique analogique : réalisation d'une balance à jauges de contrainte
 J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
J3eA, Journal sur l enseignement des sciences et technologies de l information et des systèmes, Volume 4, HorsSérie 2, 20 (2005) DOI : http://dx.doi.org/10.1051/bibj3ea:2005720 EDP Sciences, 2005 Projet
TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3 & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3. SIMULATION 7 " - 4.
 '*+ , ##) # -. /0 1 2 3. SIMULATION 7 - 4.") TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3! " #$ % & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3' & 3. SIMULATION 7 0 ( 0, - 0 - " - & 1 4. LA SOURIS 11 5. LES RACCOURCIS CLAVIER 11 STI Electronique
TABLE DES MATIÈRES 1. DÉMARRER ISIS 2 2. SAISIE D UN SCHÉMA 3! " #$ % & ' " ( ) '*+ ", ##) # " -. /0 " 1 2 " 3' & 3. SIMULATION 7 0 ( 0, - 0 - " - & 1 4. LA SOURIS 11 5. LES RACCOURCIS CLAVIER 11 STI Electronique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE
 INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
INTRODUCTION A L ELECTRONIQUE NUMERIQUE ECHANTILLONNAGE ET QUANTIFICATION I. ARCHITECTURE DE L ELECRONIQUE NUMERIQUE Le schéma synoptique ci-dessous décrit les différentes étapes du traitement numérique
Python - introduction à la programmation et calcul scientifique
 Université de Strasbourg Environnements Informatique Python - introduction à la programmation et calcul scientifique Feuille de TP 1 Avant de commencer Le but de ce TP est de vous montrer les bases de
Université de Strasbourg Environnements Informatique Python - introduction à la programmation et calcul scientifique Feuille de TP 1 Avant de commencer Le but de ce TP est de vous montrer les bases de
CHAPITRE IV Oscillations libres des systèmes à plusieurs degrés de liberté
 CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
CHAPITE IV Oscillations ibres des Systèmes à plusieurs derés de liberté 010-011 CHAPITE IV Oscillations libres des systèmes à plusieurs derés de liberté Introduction : Dans ce chapitre, nous examinons
G.P. DNS02 Septembre 2012. Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3. Réfraction
 DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
DNS Sujet Réfraction...1 I.Préliminaires...1 II.Première partie...1 III.Deuxième partie...3 Réfraction I. Préliminaires 1. Rappeler la valeur et l'unité de la perméabilité magnétique du vide µ 0. Donner
AP1.1 : Montages électroniques élémentaires. Électricité et électronique
 STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
STI2D Option SIN Terminale AP1.1 : Montages électroniques élémentaires Électricité et électronique Durée prévue : 3h. Problématique : connaître les composants élémentaires de l'électronique Compétences
Automatique (AU3): Précision. Département GEII, IUT de Brest contact: [email protected]
: Précision. Département GEII, IUT de Brest contact: vincent.choqueuse@univ-brest.fr") Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: [email protected] Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Automatique (AU3): Précision des systèmes bouclés Département GEII, IUT de Brest contact: [email protected] Plan de la présentation Introduction 2 Écart statique Définition Expression Entrée
Logiciel. Table de matières I Environnement requis...2
 1 Table de matières I Environnement requis...2 I 1 - Configuration minimum conseillée...2 I 2 - Désinstallation de l application...2 I 3 - Lancement de l application...2 II Installation du logiciel...2
1 Table de matières I Environnement requis...2 I 1 - Configuration minimum conseillée...2 I 2 - Désinstallation de l application...2 I 3 - Lancement de l application...2 II Installation du logiciel...2
TP 1. Prise en main du langage Python
 TP. Prise en main du langage Python Cette année nous travaillerons avec le langage Python version 3. ; nous utiliserons l environnement de développement IDLE. Étape 0. Dans votre espace personnel, créer
TP. Prise en main du langage Python Cette année nous travaillerons avec le langage Python version 3. ; nous utiliserons l environnement de développement IDLE. Étape 0. Dans votre espace personnel, créer
BTS Groupement A. Mathématiques Session 2011. Spécialités CIRA, IRIS, Systèmes électroniques, TPIL
 BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
BTS Groupement A Mathématiques Session 11 Exercice 1 : 1 points Spécialités CIRA, IRIS, Systèmes électroniques, TPIL On considère un circuit composé d une résistance et d un condensateur représenté par
Gnuplot. Chapitre 3. 3.1 Lancer Gnuplot. 3.2 Options des graphes
 Chapitre 3 Gnuplot Le langage C ne permet pas directement de dessiner des courbes et de tracer des plots. Il faut pour cela stocker résultats dans des fichier, et, dans un deuxième temps utiliser un autre
Chapitre 3 Gnuplot Le langage C ne permet pas directement de dessiner des courbes et de tracer des plots. Il faut pour cela stocker résultats dans des fichier, et, dans un deuxième temps utiliser un autre
Découverte du tableur CellSheet
 Découverte du tableur CellSheet l application pour TI-83 Plus et TI-84 Plus. Réalisé par Guy Juge Professeur de mathématiques et formateur IUFM de l académie de Caen Pour l équipe des formateurs T 3 Teachers
Découverte du tableur CellSheet l application pour TI-83 Plus et TI-84 Plus. Réalisé par Guy Juge Professeur de mathématiques et formateur IUFM de l académie de Caen Pour l équipe des formateurs T 3 Teachers
Continuité et dérivabilité d une fonction
 DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
DERNIÈRE IMPRESSIN LE 7 novembre 014 à 10:3 Continuité et dérivabilité d une fonction Table des matières 1 Continuité d une fonction 1.1 Limite finie en un point.......................... 1. Continuité
Guide d'utilisation. OpenOffice Calc. AUTEUR INITIAL : VINCENT MEUNIER Publié sous licence Creative Commons
 Guide d'utilisation OpenOffice Calc AUTEUR INITIAL : VINCENT MEUNIER Publié sous licence Creative Commons 1 Table des matières Fiche 1 : Présentation de l'interface...3 Fiche 2 : Créer un nouveau classeur...4
Guide d'utilisation OpenOffice Calc AUTEUR INITIAL : VINCENT MEUNIER Publié sous licence Creative Commons 1 Table des matières Fiche 1 : Présentation de l'interface...3 Fiche 2 : Créer un nouveau classeur...4
Découverte du logiciel ordinateur TI-n spire / TI-n spire CAS
 Découverte du logiciel ordinateur TI-n spire / TI-n spire CAS Mémento Ouvrir TI-Nspire CAS. Voici la barre d outils : L insertion d une page, d une activité, d une page où l application est choisie, pourra
Découverte du logiciel ordinateur TI-n spire / TI-n spire CAS Mémento Ouvrir TI-Nspire CAS. Voici la barre d outils : L insertion d une page, d une activité, d une page où l application est choisie, pourra
t 100. = 8 ; le pourcentage de réduction est : 8 % 1 t Le pourcentage d'évolution (appelé aussi taux d'évolution) est le nombre :
 est le nombre :") Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Terminale STSS 2 012 2 013 Pourcentages Synthèse 1) Définition : Calculer t % d'un nombre, c'est multiplier ce nombre par t 100. 2) Exemples de calcul : a) Calcul d un pourcentage : Un article coûtant
Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT
 Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT Ces exercices portent sur les items 2, 3 et 5 du programme d informatique des classes préparatoires,
Exercices types Algorithmique et simulation numérique Oral Mathématiques et algorithmique Banque PT Ces exercices portent sur les items 2, 3 et 5 du programme d informatique des classes préparatoires,
TP: Représentation des signaux binaires. 1 Simulation d un message binaire - Codage en ligne
 Objectifs : Ce TP est relatif aux différentes méthodes de codage d une information binaire, et à la transmission en bande de base de cette information. Les grandes lignes de ce TP sont l étude des méthodes
Objectifs : Ce TP est relatif aux différentes méthodes de codage d une information binaire, et à la transmission en bande de base de cette information. Les grandes lignes de ce TP sont l étude des méthodes
SCIENCES INDUSTRIELLES (S.I.)
") SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
SESSION 2014 PSISI07 EPREUVE SPECIFIQUE - FILIERE PSI " SCIENCES INDUSTRIELLES (S.I.) Durée : 4 heures " N.B. : Le candidat attachera la plus grande importance à la clarté, à la précision et à la concision
Caractéristiques des ondes
 Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
Caractéristiques des ondes Chapitre Activités 1 Ondes progressives à une dimension (p 38) A Analyse qualitative d une onde b Fin de la Début de la 1 L onde est progressive puisque la perturbation se déplace
M HAMED EL GADDAB & MONGI SLIM
 Sous la direction : M HAMED EL GADDAB & MONGI SLIM Préparation et élaboration : AMOR YOUSSEF Présentation et animation : MAHMOUD EL GAZAH MOHSEN BEN LAMINE AMOR YOUSSEF Année scolaire : 2007-2008 RECUEIL
Sous la direction : M HAMED EL GADDAB & MONGI SLIM Préparation et élaboration : AMOR YOUSSEF Présentation et animation : MAHMOUD EL GAZAH MOHSEN BEN LAMINE AMOR YOUSSEF Année scolaire : 2007-2008 RECUEIL
Utiliser des fonctions complexes
 Chapitre 5 Utiliser des fonctions complexes Construire une formule conditionnelle avec la fonction SI Calculer un remboursement avec la fonction VPN Utiliser des fonctions mathématiques Utiliser la fonction
Chapitre 5 Utiliser des fonctions complexes Construire une formule conditionnelle avec la fonction SI Calculer un remboursement avec la fonction VPN Utiliser des fonctions mathématiques Utiliser la fonction
Créer une base de données
 Access Créer une base de données SOMMAIRE Généralités sur les bases de données... 3 Création de la base de données... 4 A) Lancement d'access... 4 B) Enregistrement de la base de données vide... 4 Création
Access Créer une base de données SOMMAIRE Généralités sur les bases de données... 3 Création de la base de données... 4 A) Lancement d'access... 4 B) Enregistrement de la base de données vide... 4 Création
UEO11 COURS/TD 1. nombres entiers et réels codés en mémoire centrale. Caractères alphabétiques et caractères spéciaux.
 UEO11 COURS/TD 1 Contenu du semestre Cours et TDs sont intégrés L objectif de ce cours équivalent a 6h de cours, 10h de TD et 8h de TP est le suivant : - initiation à l algorithmique - notions de bases
UEO11 COURS/TD 1 Contenu du semestre Cours et TDs sont intégrés L objectif de ce cours équivalent a 6h de cours, 10h de TD et 8h de TP est le suivant : - initiation à l algorithmique - notions de bases
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique
 SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des
SOCLE COMMUN - La Compétence 3 Les principaux éléments de mathématiques et la culture scientifique et technologique DOMAINE P3.C3.D1. Pratiquer une démarche scientifique et technologique, résoudre des